关于发电机定、转子间气隙的计
算方法简介
1.关于定、转子间气隙结构的介绍
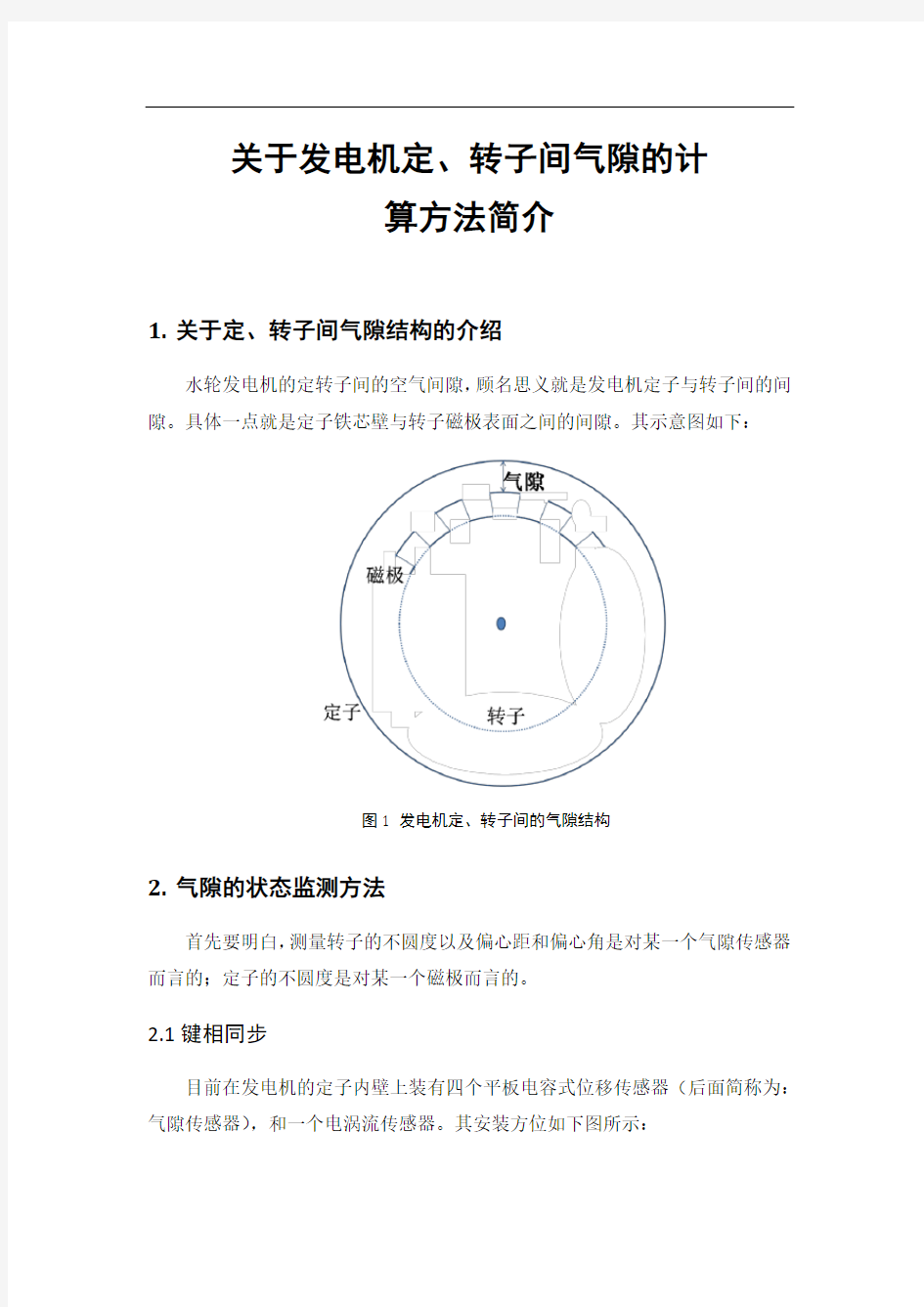
水轮发电机的定转子间的空气间隙,顾名思义就是发电机定子与转子间的间隙。具体一点就是定子铁芯壁与转子磁极表面之间的间隙。其示意图如下:
图1 发电机定、转子间的气隙结构
2.气隙的状态监测方法
首先要明白,测量转子的不圆度以及偏心距和偏心角是对某一个气隙传感器而言的;定子的不圆度是对某一个磁极而言的。
2.1键相同步
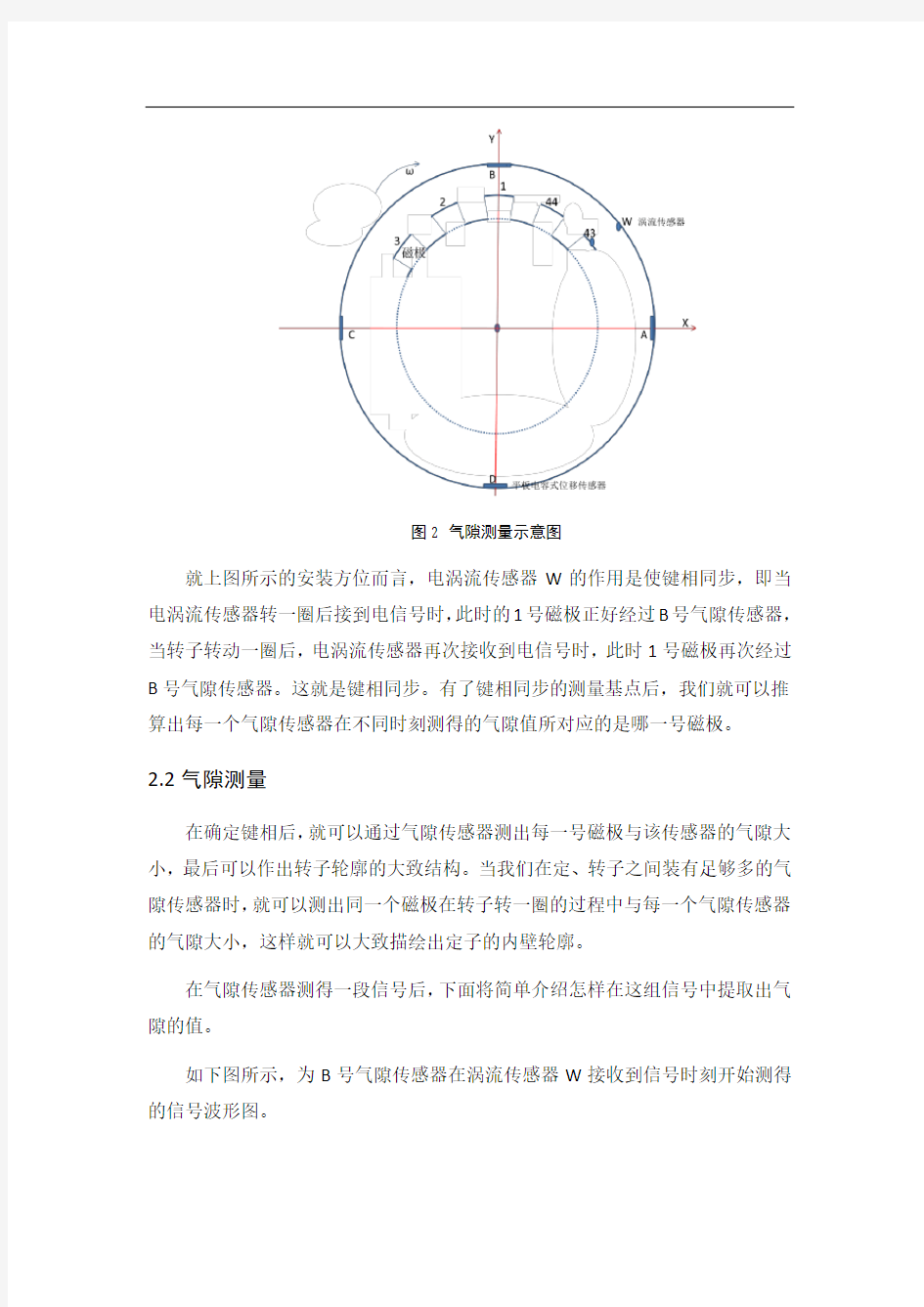
目前在发电机的定子内壁上装有四个平板电容式位移传感器(后面简称为:气隙传感器),和一个电涡流传感器。其安装方位如下图所示:
图2 气隙测量示意图
就上图所示的安装方位而言,电涡流传感器W的作用是使键相同步,即当电涡流传感器转一圈后接到电信号时,此时的1号磁极正好经过B号气隙传感器,当转子转动一圈后,电涡流传感器再次接收到电信号时,此时1号磁极再次经过B号气隙传感器。这就是键相同步。有了键相同步的测量基点后,我们就可以推算出每一个气隙传感器在不同时刻测得的气隙值所对应的是哪一号磁极。
2.2气隙测量
在确定键相后,就可以通过气隙传感器测出每一号磁极与该传感器的气隙大小,最后可以作出转子轮廓的大致结构。当我们在定、转子之间装有足够多的气隙传感器时,就可以测出同一个磁极在转子转一圈的过程中与每一个气隙传感器的气隙大小,这样就可以大致描绘出定子的内壁轮廓。
在气隙传感器测得一段信号后,下面将简单介绍怎样在这组信号中提取出气隙的值。
如下图所示,为B号气隙传感器在涡流传感器W接收到信号时刻开始测得的信号波形图。
图3 B号气隙传感器检测到的信号波形
上图是根据图2所对应的磁极关系来确定的B号气隙传感器的信号波形,即当涡流传感器接收到信号时,正好是1号磁极经过B号气隙传感器。此后依次是2、3、4号磁极经过该传感器。我们所要测量的气隙值就是上图所示的波形的每一个“波谷”,即每一个最小值对应的就是该磁极与定子间的气隙值。
如下面所示,为某一水电站的发电机定、转子间气隙图,该图是就同一传感器(如图2 中的B号传感器)所测的各磁极气隙大小。
图4 B号传感器下测得各个磁极的气隙大小
从上图可以看出,该传感器对应的气隙最大值,发生在6号磁极上,气隙最大值为26.27mm ;最小气隙值为23.79mm ,发生在29号磁极上。平均气隙为25.03mm 。根据键相同步,还可以测得此时转子的机械转速为136.3r/min 。
同理我们可以就某一磁极得到该磁极与定子之间一周的气隙大小。这里就不重复举例说明。
3. 关于定、转子的轮廓不圆度分析
这里分析不圆度采用的是最小二乘圆法(下一节具体介绍)。首先关于评定圆的不圆度的定义,即圆度误差:圆的形状偏离几何圆的程度。其具体的表示方法是将实际轮廓夹在两同心圆之间,当这两几何圆的间隙为最小时,用这两个几何圆的半径只差来表示该轮廓的圆度误差。
根据上一节得到的定、转子轮廓后,就要用最小二乘圆法得到该轮廓的最小二乘圆。确定圆心坐标,与实际的测量中心(在转子上就是转子的回转轴线)的相对位置,可以确定转子的偏心距和偏心角,最后可以求出轮廓上的点与最小二乘圆的圆心之间的最大距离R max 和最小距离R min ,这两个值就可以认为是前面提到的两个同心圆的半径,那么这个差值e 就是该轮廓的不圆度。
结合上一节关于气隙的测量方法,到现在我们就可以知道定、转子间的气隙大小,最大气隙、最小气隙,以及对应的磁极号;还可以知道平均气隙,转子的转速;以及定子不圆度;转子不圆度、偏心距、偏心角。
4. 最小二乘圆法
最小二乘圆是一个理想圆,得到最小二乘圆的原理是使从轮廓上的个点到圆的距离的平方和最小。即:
21()min n i
i R R =-=∑ (i =1,2,……,n )
式中:R i ——实际被测的轮廓上各点到最小二乘圆心的距离
R ——最小二乘圆的半径
按最小二乘圆法评定圆度误差的原理如下图所示:
图5 最小二乘圆法评定圆度误差
根据英国国家标准,以及美国国家标准,确定最小二乘圆的公式如下:
1
1
1221,(n
i i n
i i n
i i i a x n b y n R R R n =======∑∑∑
上面公式不多作说明,但需要指出的是,坐标原点的选取就是转轴回转的轴线(并不一定是转轴的几何轴心),而轮廓上每一点(x i ,y i )就是根据所测气隙值以及相应磁极的方位角求得。
5. 总结
上面分别介绍了气隙的测量,定、转子轮廓的得出(这里就是求出轮廓上个点的坐标)
,然后求得定、转子的最小二乘圆,最后分析定、转子的不圆度以及
偏心距和偏心角。
下面就图4所示的实例,依据上面的步骤进行完整的分析。根据图3得到对应于B号气隙传感器的所有磁极气隙大小,可以绘制出转子的轮廓,如下图所示:
图6 定、转子轮廓以及所得最小二乘圆
这里定子轮廓的得到,是根据同一个磁极转一周后与定子内壁上每一个气隙传感器的测量值而求出来的(这里没有提供实测数据)。
图中都已经标出了相应的指标,这里不在累赘说明。
以上就是关于定、转子气隙大小测量以及相关的评定方法的介绍。
三相异步电动机结构详细图解 图1封闭式三相异步电动机的结构 1—端盖2—轴承3—机座4—定子绕组5—转子 6—轴承7—端盖8—风扇9—风罩10—接线盒 异步电动机的结构也可分为定子.转子两大部分。定子就是电机中固定不动的部分,转子是电机的旋转部分。由于异步电动机的定子产生励磁旋转磁场,同时从电源吸收电能,并产生且通过旋转磁场把电能转换成转子上的机械能,所以与直流电机不同,交流电机定子是电枢。另外,定.转子之间还必须有一定间隙(称为空气隙),以保证转子的自由转动。异步电动机的空气隙较其他类型的电动机气隙要小,一般为~2mm。 三相异步电动机外形有开启式.防护式.封闭式等多种
形式,以适应不同的工作需要。在某些特殊场合,还有特殊的外形防护型式,如防爆式.潜水泵式等。不管外形如何电动机结构 基本上是相同的。现以封闭式电动机为例介绍三相异步电动机的结构。如图1所示是一台封闭式三相异步电动机解体后的零部件图。 1.定子部分 定子部分由机座.定子铁心.定子绕组及端盖.轴承等部件组成。 (1)机座。机座用来支承定子铁心和固定端盖。中.小型电动机机座一般用铸铁浇成,大型电动机多采用钢板焊接而成。 (2)定子铁心。定子铁心是电动机磁路的一部分。为了减小涡流和磁滞损耗,通常用厚的硅钢片叠压成圆筒,硅钢片表面的氧化层(大型电动机要求涂绝缘漆)作为片间绝缘,在铁心的内圆上均匀分布有与轴平行的槽,用以嵌放定子绕组。 (a)直条形式(b)斜条形式
图2 笼型异步电动机的转子绕组形式 (3)定子绕组。定子绕组是电动机的电路部分,也是最重要的部分,一般是由绝缘铜(或铝)导线绕制的绕组联接而成。它的作用就是利用通入的三相交流电产生旋转磁场。通常,绕组是用高强度绝缘漆包线绕制成各种型式的绕组,按一定的排列方式嵌入定子槽内。槽口用槽楔(一般为竹制)塞紧。槽内绕组匝间.绕组与铁心之间都要有良好的绝缘。如果是双层绕组(就是一个槽内分上下两层嵌放两条绕组边),还要加放层间绝缘。 (4)轴承。轴承是电动机定.转子衔接的部位,轴承有滚动轴承和滑动轴承两类,滚动轴承又有滚珠轴承(也称为球轴承),目前多数电动机都采用滚动轴承。这种轴承的外部有贮存润滑油的油箱,轴承上还装有油环,轴转动时带动油环转动,把油箱中的润滑油带到轴与轴承的接触面上。为使润滑油能分布在整个接触面上,轴承上紧贴轴的一面一般开有油槽。 2.转子部分 转子是电动机中的旋转部分,如图中的部件5。一般由
关于发电机定、转子间气隙的计 算方法简介 1.关于定、转子间气隙结构的介绍 水轮发电机的定转子间的空气间隙,顾名思义就是发电机定子与转子间的间隙。具体一点就是定子铁芯壁与转子磁极表面之间的间隙。其示意图如下: 图1 发电机定、转子间的气隙结构 2.气隙的状态监测方法 首先要明白,测量转子的不圆度以及偏心距和偏心角是对某一个气隙传感器而言的;定子的不圆度是对某一个磁极而言的。 2.1键相同步 目前在发电机的定子内壁上装有四个平板电容式位移传感器(后面简称为:
气隙传感器),和一个电涡流传感器。其安装方位如下图所示: 图2 气隙测量示意图 就上图所示的安装方位而言,电涡流传感器W的作用是使键相同步,即当电涡流传感器转一圈后接到电信号时,此时的1号磁极正好经过B号气隙传感器,当转子转动一圈后,电涡流传感器再次接收到电信号时,此时1号磁极再次经过B号气隙传感器。这就是键相同步。有了键相同步的测量基点后,我们就可以推算出每一个气隙传感器在不同时刻测得的气隙值所对应的是哪一号磁极。 2.2气隙测量 在确定键相后,就可以通过气隙传感器测出每一号磁极与该传感器的气隙大小,最后可以作出转子轮廓的大致结构。当我们在定、转子之间装有足够多的气隙传感器时,就可以测出同一个磁极在转子转一圈的过程中与每一个气隙传感器的气隙大小,这样就可以大致描绘出定子的内壁轮廓。 在气隙传感器测得一段信号后,下面将简单介绍怎样在这组信号中提取出气
隙的值。 如下图所示,为B号气隙传感器在涡流传感器W接收到信号时刻开始测得的信号波形图。 图3 B号气隙传感器检测到的信号波形 上图是根据图2所对应的磁极关系来确定的B号气隙传感器的信号波形,即当涡流传感器接收到信号时,正好是1号磁极经过B号气隙传感器。此后依次是2、3、4号磁极经过该传感器。我们所要测量的气隙值就是上图所示的波形的每一个“波谷”,即每一个最小值对应的就是该磁极与定子间的气隙值。 如下面所示,为某一水电站的发电机定、转子间气隙图,该图是就同一传感器(如图2 中的B号传感器)所测的各磁极气隙大小。
三相鼠笼电机气隙对性能的影响分析 王道元 摘要:感应电机的气隙大小直接影响电机运行的各项性能指标,是电机设计和优化过程中最为关注的参数之一。本文以一个三相笼型异步电动机为例,首先在Maxwell Ansof t 电磁分析软件中建立感应电机有限元仿真模型,然后得出了在不同气隙大小情况下对气隙磁密、相反电动势、功率因数、附加损耗、效率和启动转矩的影响。 关键词:感应电机;气隙大小;功率因数;效率; The Influence of Air-gap on the Performance Analysis of Induction Motor Abstract:Air-gap of induction motor which directly influences the performance of motor, is one of the most important indexes when design and optimizing motors. This paper sets up a model of three-phase squirrel-cage asynchronous motor,The Ansoft Maxwell software was used to have created a finite element simulation model of induction motor. Under different air-gap length, the air-gap magnetic field, back electromotive force, power factor,supplement losses, power efficiency and starting torque were influenced. Key words:induction motor; air-gap length; power factor; power efficiency
电机运转前的准备工作与电动机气隙测 量 电机运转前的准备工作 1.仔细察看电机内部情况,不得有外物存在。 2.用大约2个大气压的干保压缩空气.清除电机各部分之灰尘.为避免损坏线圈的绝缘起见,不能用金属吹管。 3.用煤油清洗轴承。 4.用油环式润滑的轴承,将润滑油注入轴承中到所规定的油面高度,润滑油注入之前,应检查油的牌号是否合乎要求,油是否变质或不清洁。如不清洁时,必须调换新油。 对一般电机而言、用油环润滑者,采用机器油,用压力加油润滑或混合式润滑者.采用透平油。 滚动轴承的润滑材抖.一般电机采用钙钠基润滑脂,湿热带型电机采用硫化铂复合钙基脂或锂基润滑脂。 5.如电机和其他机器直接连接时,须检查联轴器是否良好,同时检查机组的中心线是否在一直线上。 6.如电机和其他机器借减速齿轮箱连接时,须检查联轴器的连接情况,并检查齿轮轮中有无轧牢情况。 7.用手或工具转动转子,看转动是否灵活。以便检查安装质量和轴承润滑情况是否良好。 8,用沾有少量汽油的棉纱,将换向器及集电环的表面揩净,如
集电环上有铜锈时,必须用细砂皮纸按去,如果换向片间槽中有垃圾时,应用硬纸板去清除。 9.检查集电环和换向路上的电刷装置是否正确,刷架的固定必须牢固,电刷在刷盒内应能上下移动自如,但不应有偏转,其配合应为D6/Dc8,电刷盒与集电环或换向器间的间隔应保持在2—3毫米之间,并须注意电刷与刷盒间空隙不要有凝结水。10.电刷与集电环或换向器的接触应良好,如接触不良时,应该用细沙皮纸按电机旋转方向磨光电刷。 11.检查电刷压力,换向器。广电刷压力为0.15一0.2公斤/厘米”,集电环上电刷压力对于1500转/分者为0.2一0.4公斤/厘米”,对于1000转/分及以下者为0、2一0.25公斤/厘米”,电刷彼此间的压力相差不应大于+-10%,电刷上的编织导线,不能与机壳或不同极性的电刷相碰。 12.测量电机的定转子绝缘电阻,应不小于按第III章一节第 l 条公式计算所得之值。 (如运转前恰为干燥后不久,则此时不必再测量)。 13.用塞尺测量同步电机各个磁极顶部与定于间之气隙不均匀度,以及励磁机主极与电枢间的气隙不均匀度,其最大或最小气隙与平均气隙之差对平均气隙之比,一般不得超过+-5%,在低速电机中,不应超过+-10%。 14.检查同步电机和励磁机的气隙值,当气隙为3毫米及以下者,容差为土10%,气隙超过3毫米以上者,容差不应超过土5%。
关于发电机定、转子间气隙的计算方法简介 1、关于定、转子间气隙结构的介绍 水轮发电机的定转子间的空气间隙,顾名思义就是发电机定子与转子间的间隙。具体一点就是定子铁芯壁与转子磁极表面之间的间隙。其示意图如下: 2. 气隙的状态监测方法 首先要明白,测量转子的不圆度以及偏心距和偏心角是对某一个气隙传感器而言的;定子的不圆度是对某一个磁极而言的。 2.1键相同步 目前在发电机的定子内壁上装有四个平板电容式位移传感器(后面简称为:气隙传感器),和一个电涡流传感器。其安装方位如下图所示:
就上图所示的安装方位而言,电涡流传感器W的作用是使键相同步,即当电涡流传感器转一圈后接到电信号时,此时的1号磁极正好经过B号气隙传感器,当转子转动一圈后,电涡流传感器再次接收到电信号时,此时1号磁极再次经过B号气隙传感器。这就是键相同步。有了键相同步的测量基点后,我们就可以推算出每一个气隙传感器在不同时刻测得的气隙值所对应的是哪一号磁极。 2.2气隙测量 在确定键相后,就可以通过气隙传感器测出每一号磁极与该传感器的气隙大小,最后可以作出转子轮廓的大致结构。当我们在定、转子之间装有足够多的气隙传感器时,就可以测出同一个磁极在转子转一圈的过程中与每一个气隙传感器的气隙大小,这样就可以大致描绘出定子的内壁轮廓。 在气隙传感器测得一段信号后,下面将简单介绍怎样在这组信号中提取出气隙的值。 如下图所示,为B号气隙传感器在涡流传感器W接收到信号时刻开始测得的信号波形图。
上图是根据图2所对应的磁极关系来确定的B号气隙传感器的信号波形,即当涡流传感器接收到信号时,正好是1号磁极经过B号气隙传感器。此后依次是2、3、4号磁极经过该传感器。我们所要测量的气隙值就是上图所示的波形的每一个“波谷”,即每一个最小值对应的就是该磁极与定子间的气隙值。 如下面所示,为某一水电站的发电机定、转子间气隙图,该图是就同一传感器(如图2 中的B号传感器)所测的各磁极气隙大小。 从上图可以看出,该传感器对应的气隙最大值,发生在6号磁极上,气隙最大值为26.27mm;最小气隙值为23.79mm,发生在29号磁极上。平均气隙为25.03mm。根据键相同步,还可
三相异步电动机结构详 细图解 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
三相异步电动机结构详细图解 图1封闭式三相异步电动机的结构 1—端盖2—轴承3—机座4—定子绕组5—转子 6—轴承7—端盖8—风扇9—风罩10—接线盒 异步电动机的结构也可分为定子.转子两大部分。定子就是电机中固定不动的部分,转子是电机的旋转部分。由于异步电动机的定子产生励磁旋转磁场,同时从电源吸收电能,并产生且通过旋转磁场把电能转换成转子上的机械能,所以与直流电机不同,交流电机定子是电枢。另外,定.转子之间还必须有一定间隙(称为空气隙),以保证转子的自由转动。异步电动机的空气隙较其他类型的电动机气隙要小,一般为~2mm。 三相异步电动机外形有开启式.防护式.封闭式等多种形式,以适应不同的工作需要。在某些特殊场合,还有特
殊的外形防护型式,如防爆式.潜水泵式等。不管外形如何电动机结构 基本上是相同的。现以封闭式电动机为例介绍三相异步电动机的结构。如图1所示是一台封闭式三相异步电动机解体后的零部件图。 1.定子部分 定子部分由机座.定子铁心.定子绕组及端盖.轴承等部件组成。 (1)机座。机座用来支承定子铁心和固定端盖。中.小型电动机机座一般用铸铁浇成,大型电动机多采用钢板焊接而成。 (2)定子铁心。定子铁心是电动机磁路的一部分。为了减小涡流和磁滞损耗,通常用厚的硅钢片叠压成圆筒,硅钢片表面的氧化层(大型电动机要求涂绝缘漆)作为片间绝缘,在铁心的内圆上均匀分布有与轴平行的槽,用以嵌放定子绕组。 (a)直条形式(b)斜条形式
图2 笼型异步电动机的转子绕组形式 (3)定子绕组。定子绕组是电动机的电路部分,也是最重要的部分,一般是由绝缘铜(或铝)导线绕制的绕组联接而成。它的作用就是利用通入的三相交流电产生旋转磁场。通常,绕组是用高强度绝缘漆包线绕制成各种型式的绕组,按一定的排列方式嵌入定子槽内。槽口用槽楔(一般为竹制)塞紧。槽内绕组匝间.绕组与铁心之间都要有良好的绝缘。如果是双层绕组(就是一个槽内分上下两层嵌放两条绕组边),还要加放层间绝缘。 (4)轴承。轴承是电动机定.转子衔接的部位,轴承有滚动轴承和滑动轴承两类,滚动轴承又有滚珠轴承(也称为球轴承),目前多数电动机都采用滚动轴承。这种轴承的外部有贮存润滑油的油箱,轴承上还装有油环,轴转动时带动油环转动,把油箱中的润滑油带到轴与轴承的接触面上。为使润滑油能分布在整个接触面上,轴承上紧贴轴的一面一般开有油槽。 2.转子部分 转子是电动机中的旋转部分,如图中的部件5。一般由转轴.转子铁心.转子绕组.风扇等组成。转轴用碳纲制成,两端轴颈与轴承相配合。出轴端铣有键槽,用以固定皮带轮或联轴器。转轴是输出转矩.带动负载的部件。转子铁心也是电动机磁路的一部分。由厚的硅钢片叠压成圆柱体,