人体下肢外骨骼关键技术分析与研究3
赵彦峻,徐诚,张景柱,骆宇飞
(南京理工大学机械工程学院,江苏南京 210094)
摘要:随着单兵武器装备的不断升级,质量问题成为单兵作战灵活性与生存力的一个障碍。人体下肢外骨骼装置能提高士兵的承载能力,使士兵能够负重长途跋涉于车辆无法行驶的路面,充分发挥人与机器的优势,实现人的灵活、机动、智慧与机器强壮性的完美结合。文中介绍了目前国内外在人体下肢外骨骼研究领域的最新研究发展动态,并就其关键性技术进行了分析与研究,为人体下肢外骨骼的进一步设计与开发提供了详实的信息与参考依据。
关键词:外骨骼;双足步行;稳定性;单兵;装备
中图分类号:TJ819 文献标识码:A 文章编号:1001-2354(2008)10-0001-05
未来战争的信息化与数字化极大地刺激了被誉为世界轻武器第4次浪潮的单兵系统的发展。随着单兵装备的不断融合与增加,单兵作战能力将急剧上升,然而士兵的负担也越来越重。在沉重负荷下,士兵难以开展灵活的运动,而且负载过重会导致士兵体力下降,身体机能变弱,从而使抵抗力降低,最终使士兵战斗力下降而无法参与战斗。给士兵减负成了一个急待解决的问题[1]。
我国边防蜿蜒,地形复杂,森林、山路、阶梯路面、海岸线及沟壑之路面颇多,这种路面车辆难施其技,如战争暴发只能靠人力运输物资,可是人类的体力却无法与车辆的承载能力相比,人们想到了用双足步行机器人代替人类承载,然而机器人缺乏人类特有的灵活性和智慧。于是一种既拥有人的智慧又能承受重载的机器成为国防科研热点之一。
人体下肢外骨骼即是可以将人的智慧与机器的承载能力合为一体的机器。它不仅能提高士兵的承载能力,还能突破其使能限制,提高士兵的行军速度、越障能力,使士兵能够负重长途跋涉于车辆无法行驶的复杂路面,实现人的灵活性、机动性、智慧性与机器强壮性的完美结合。它是一项高度集成的技术,与能源技术、微驱动技术、材料技术和控制技术、计算机技术、网络技术、通信技术及仿生技术密切相关,是集机、电、液、仿生、通信等于一体的综合性技术。下肢外骨骼不仅应用于军事方面,在民用方面也具有广阔应用前景:救灾、建筑施工现场、医护用辅助抱病人、作为下肢失调者的训练器及辅助行走装置等。文中仅针对单兵用承载下肢外骨骼进行研究与分析。
1 人体下肢外骨骼研究现状
1.1 人体下肢外骨骼功能及组成
人体下肢外骨骼应穿脱容易、灵活、轻便、不给人体带来不适感,能柔顺而自然地实现与人同步的走、跑、跳、蹲、坐、转身等动作,不会阻碍和影响人体的运动,不会产生人体感觉到的延迟。它不但能背负重物,在必要的情况下,还能代替人类行走。它有自适应保持平衡之功能,万一摔倒能迅速容易地站起。在紧急情况下(一旦失效或不再使用时),它应能立即与士兵脱离。如果在战争中不得不放弃它,应能令其短期失效或长期失效。
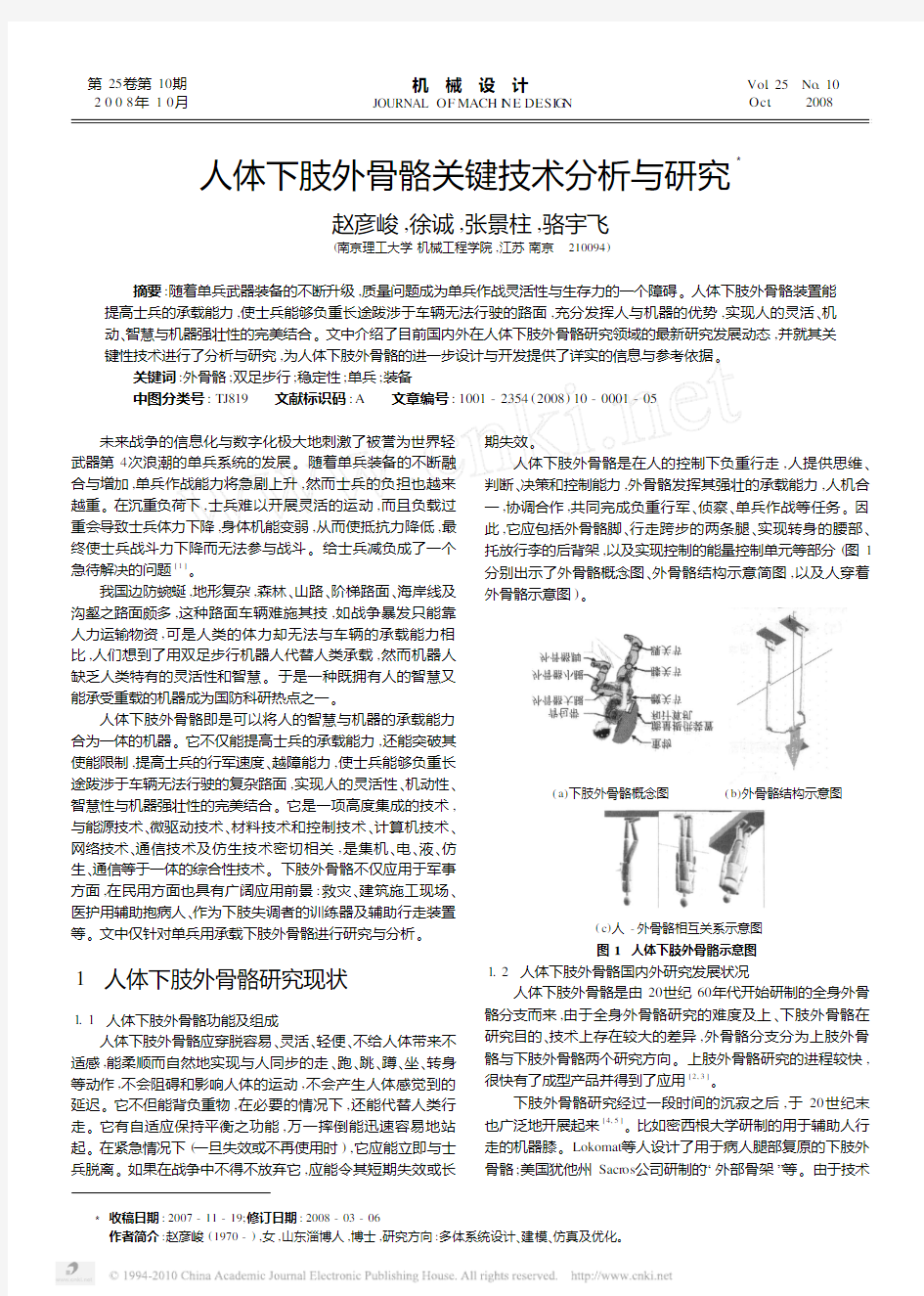
人体下肢外骨骼是在人的控制下负重行走,人提供思维、判断、决策和控制能力,外骨骼发挥其强壮的承载能力,人机合一,协调合作,共同完成负重行军、侦察、单兵作战等任务。因此,它应包括外骨骼脚、行走跨步的两条腿、实现转身的腰部、托放行李的后背架,以及实现控制的能量控制单元等部分(图1分别出示了外骨骼概念图、外骨骼结构示意简图,以及人穿着外骨骼示意图)。
(a)下肢外骨骼概念图(b)
外骨骼结构示意图
(c)人-外骨骼相互关系示意图
图1 人体下肢外骨骼示意图
1.2 人体下肢外骨骼国内外研究发展状况
人体下肢外骨骼是由20世纪60年代开始研制的全身外骨骼分支而来,由于全身外骨骼研究的难度及上、下肢外骨骼在研究目的、技术上存在较大的差异,外骨骼分支分为上肢外骨骼与下肢外骨骼两个研究方向。上肢外骨骼研究的进程较快,很快有了成型产品并得到了应用[2,3]。
下肢外骨骼研究经过一段时间的沉寂之后,于20世纪末也广泛地开展起来[4,5]。比如密西根大学研制的用于辅助人行走的机器膝。Lokomat等人设计了用于病人腿部复原的下肢外骨骼;美国犹他州Sacr os公司研制的“外部骨架”等。由于技术
第25卷第10期2008年10月
机 械 设 计
JOURNAL OF MACH I N E DESI G N
Vol.25 No.10
Oct. 2008
3收稿日期:2007-11-19;修订日期:2008-03-06
作者简介:赵彦峻(1970-),女,山东淄博人,博士,研究方向:多体系统设计、建模、仿真及优化。
等原因,这些装置都没能被成功地应用于实践,但他们提供的算法为外骨骼的进一步研究、积累经验和开拓思路做出了巨大贡献。21世纪,下肢外骨骼又重新得到世界各国的关注,美国、日本、俄罗斯、以色列、新加坡及中国都积极地投入到研究中,而且取得了一些成果。下面分别介绍一些在下肢外骨骼方面比较成熟的研究成果。
1.3 国内外人体下肢外骨骼的研究情况
(1)HAL [6~8
]
(Hybrid A ssistive L i m b )系列产品(HAL ,
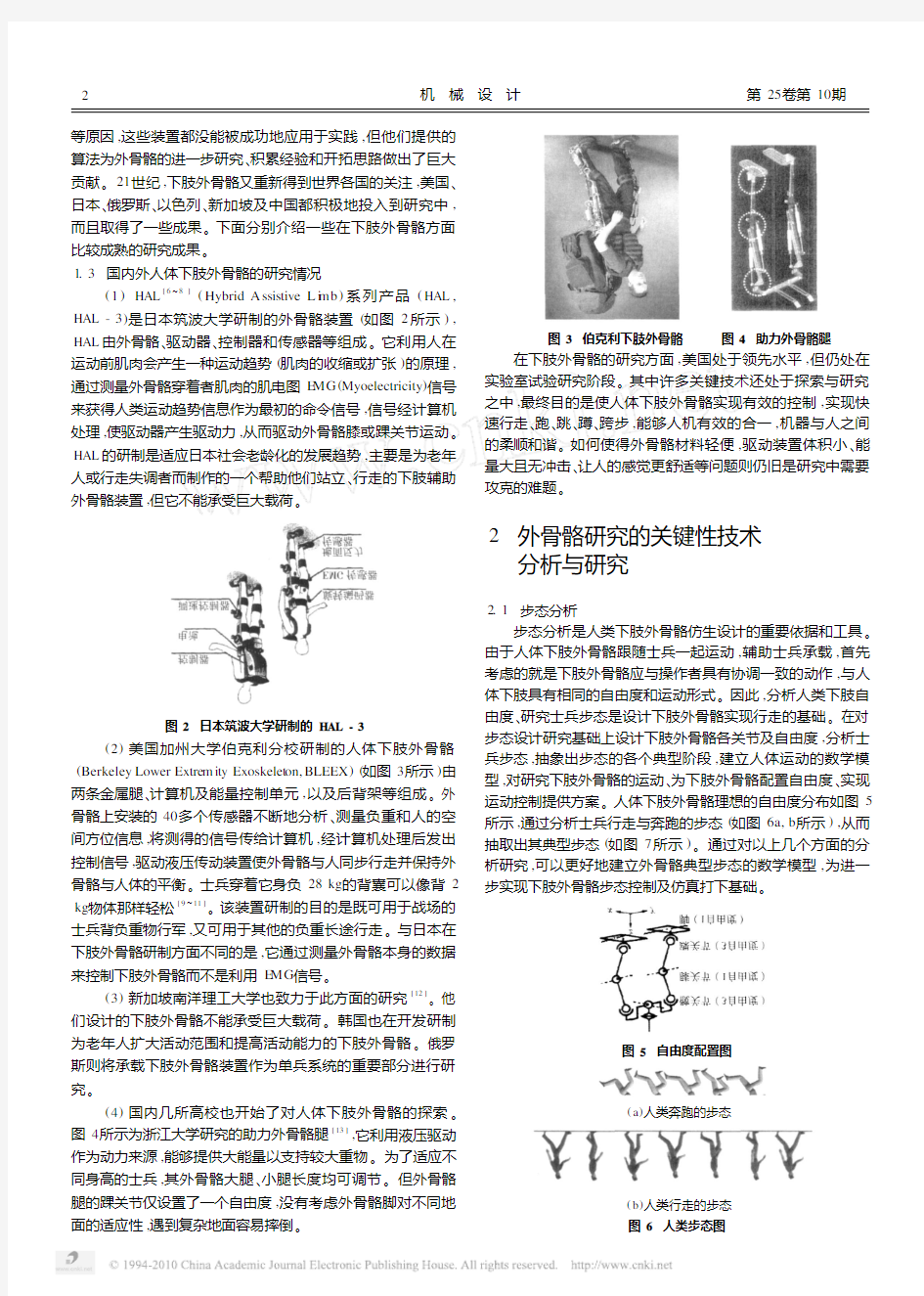
HAL -3)是日本筑波大学研制的外骨骼装置(如图2所示),HAL 由外骨骼、驱动器、控制器和传感器等组成。它利用人在
运动前肌肉会产生一种运动趋势(肌肉的收缩或扩张)的原理,通过测量外骨骼穿着者肌肉的肌电图E MG (Myoelectricity )信号来获得人类运动趋势信息作为最初的命令信号,信号经计算机处理,使驱动器产生驱动力,从而驱动外骨骼膝或踝关节运动。
HAL 的研制是适应日本社会老龄化的发展趋势,主要是为老年
人或行走失调者而制作的一个帮助他们站立、行走的下肢辅助外骨骼装置,但它不能承受巨大载荷
。
图2 日本筑波大学研制的HAL -3
(2)美国加州大学伯克利分校研制的人体下肢外骨骼(Berkeley Lower Extre m ity Exoskelet on,BLEEX )(如图3所示)由
两条金属腿、计算机及能量控制单元,以及后背架等组成。外骨骼上安装的40多个传感器不断地分析、测量负重和人的空间方位信息,将测得的信号传给计算机,经计算机处理后发出控制信号,驱动液压传动装置使外骨骼与人同步行走并保持外骨骼与人体的平衡。士兵穿着它身负28kg 的背囊可以像背2
kg 物体那样轻松
[9~11]
。该装置研制的目的是既可用于战场的
士兵背负重物行军,又可用于其他的负重长途行走。与日本在下肢外骨骼研制方面不同的是,它通过测量外骨骼本身的数据来控制下肢外骨骼而不是利用E MG 信号。
(3)新加坡南洋理工大学也致力于此方面的研究[12]。他
们设计的下肢外骨骼不能承受巨大载荷。韩国也在开发研制为老年人扩大活动范围和提高活动能力的下肢外骨骼。俄罗斯则将承载下肢外骨骼装置作为单兵系统的重要部分进行研究。
(4)国内几所高校也开始了对人体下肢外骨骼的探索。
图4所示为浙江大学研究的助力外骨骼腿[13],它利用液压驱动作为动力来源,能够提供大能量以支持较大重物。为了适应不同身高的士兵,其外骨骼大腿、小腿长度均可调节。但外骨骼腿的踝关节仅设置了一个自由度,没有考虑外骨骼脚对不同地面的适应性,遇到复杂地面容易摔倒。
图3 伯克利下肢外骨骼
图4 助力外骨骼腿
在下肢外骨骼的研究方面,美国处于领先水平,但仍处在
实验室试验研究阶段。其中许多关键技术还处于探索与研究之中,最终目的是使人体下肢外骨骼实现有效的控制,实现快速行走、跑、跳、蹲、跨步,能够人机有效的合一,机器与人之间的柔顺和谐。如何使得外骨骼材料轻便,驱动装置体积小、能量大且无冲击、让人的感觉更舒适等问题则仍旧是研究中需要攻克的难题。
2 外骨骼研究的关键性技术
分析与研究
2.1 步态分析
步态分析是人类下肢外骨骼仿生设计的重要依据和工具。由于人体下肢外骨骼跟随士兵一起运动,辅助士兵承载,首先考虑的就是下肢外骨骼应与操作者具有协调一致的动作,与人体下肢具有相同的自由度和运动形式。因此,分析人类下肢自由度、研究士兵步态是设计下肢外骨骼实现行走的基础。在对步态设计研究基础上设计下肢外骨骼各关节及自由度,分析士兵步态,抽象出步态的各个典型阶段,建立人体运动的数学模型,对研究下肢外骨骼的运动、为下肢外骨骼配置自由度、实现运动控制提供方案。人体下肢外骨骼理想的自由度分布如图5所示,通过分析士兵行走与奔跑的步态(如图6a,b 所示),从而抽取出其典型步态(如图7所示)。通过对以上几个方面的分析研究,可以更好地建立外骨骼典型步态的数学模型,
为进一步实现下肢外骨骼步态控制及仿真打下基础。
图
5 自由度配置图
(
a )人类奔跑的步态
(b )人类行走的步态
图6 人类步态图
2
机 械 设 计第25卷第10期
图7 人类行走的典型阶段
2.2 步态稳定性控制
步态稳定性控制是人体下肢外骨骼研究的重点和热点之一。自前南斯拉夫贝尔格莱德大学的麦沃曼尔?伍科布拉托
维奇提出双足步行稳定性[14,15]的理论Z M P (0力矩点概念)之后,双足步行机器人的稳定性控制一直沿用此法[16~18],所谓0力矩点即指地面上一点,在该点,作用在机器人上的合力绕这点的力矩为0。双足步行机器人为了保持身体平衡,必须保证所承受的所有外力之合力的作用线通过支撑足,并处在支撑足与地面接触的区域内。亦即当Z M P 点落在脚板支撑范围之内时,人运动是稳定的,因此,可以通过测定和调整Z M P 点位置来衡量和控制双足行走的稳定性。但是,Z MP 点的描述仅仅考虑了机器人不绕X 轴和Y 轴发生翻转。因此,Z MP 落入前面所提到的支撑面内只是两足步行机器人稳定行走的必要条件,而不是充要条件。
下肢外骨骼采用Z MP 原理实现步态稳定性控制。例如图8所示的美国伯克利下肢外骨骼脚传感器设置图及鞋外形图
[19]
,就是利用Z M P 原理将外骨骼脚底传感器作了简化和优
化,鞋中的传感器(也称作地面反力传感器)通过测量脚对地面的反力,获得人体和整个系统的Z MP,再把信息以信号的形式反馈给CP U,CP U 对这些数据进行运算调整后传给外骨骼驱动装置,从而实现对下肢外骨骼的动作调节,使外骨骼和人保持稳定行走
。
图8 BL EEX 脚传感器安装布置图及鞋外形图
2.3 驱动机构
前人对人体骨骼肌进行了大量的研究[20],从研究中得知人类骨骼肌可以等效为如图9所示的力学模型,骨骼肌相当于能收缩的单向活塞致动筒,骨相当于连杆,腱相当于接头,关节相当于铰链。从仿生学的角度来考虑,人体下肢外骨骼腿部的驱动可以使用液压动力系统,液压驱动具有稳定和承受转矩大等特点,这正好符合下肢外骨骼需要承受巨大的载荷,在行走过程中需要较大的动力和缓冲(由于脚摆动落地时与地面之间的冲击力,对于运动过程中的稳定性同样起到重要作用,而且振动会对人体产生极其不良影响,因此减小振动同样重要)的要求。但是,液压驱动有它的缺点,这种驱动方式需要油缸及液压管路,这就给外骨骼增加了质量,同时限制了外骨骼行走时的抬腿高度及下蹲的幅度值。因而,开发体积更小、驱动力更大的液压驱动装置显得非常重要
。
图9 骨骼肌的力学模型
2.4 同步行走控制
两种典型下肢外骨骼控制方法比较:
日本的HAL [21~23]利用E MG (Myoelectricity )传感器和肌肉刚度传感器测得人下肢各个部位的肌电信号来感知人的运动趋势和估计关节转矩。测量肌肉的活动需要把E MG 传感器安装在HAL 穿着者膝和臀部的屈、张表面,这种方法广泛用于医学临床的电生理诊断,在医学或假肢的应用中是一种很有前途的方法,但在很多情况下(比如因为肌肤的状况不同),测E MG 的方法并不是有效的。另外,E MG 信号容易被电磁噪音污损,而且为了精确测量,E MG 需要用特殊的胶粘接在皮肤表面,因而E M G 被认为不适合在人们的日常生活中作为操作外骨骼装置的接口,亦不适合于士兵下肢外骨骼服装。
伯克利对外骨骼的设计中考虑到要尽量减少人与外骨骼的接触,设计时只有外骨骼脚部(穿在脚上的鞋子)和背部(穿在人身上的马甲)与人体接触。外骨骼上安装大量的传感器测量外骨骼的各种数据,把测量的数据通过计算机处理后,控制外骨骼跟随人体一起运动。BLEEX 利用两通道外环拓扑通讯结构[24]实现控制信息的通讯(由外脑、R I O M s (遥控I/O 模块)、G U I 接口模块组成)。外脑管理着整个通信网络,是管理和控制的中心。它由3个PC /1042p lus (EXOCP U,EXOPC I,管理I/O 模块板(SI O M S ))组成。与控制算法相关的所有复杂程序的计算都是在EXOCP U 中完成,并把计算结果提供给系统存储器。
EXOPC I 是EXOCP U 和SI O M s 的一个接口单元,EXOPC I 把驱动
器数据从系统存储器传送到SI O M0和SI O M1,把传感器数据从
SI O M0和SI O M1传递到系统存储器。SI O M0和SI O M1把驱动
机构的数据从EXOPC I 传递到R I O M s,把传感器数据从R I O M s 传递到EXOPC I 。R I O M s 分布于外骨骼全身,它的任务就是从所有传感器获取信号并提供驱动信号给所有的执行机构。
随着控制理论和技术的发展,下肢外骨骼控制问题也会得到更进一步的发展。下肢外骨骼可以通过预设和自学习机制,达到与士兵协调一致同步运动的目的。
2.5 能源与动力技术
不论是在仿人型机器人方面还是在下肢外骨骼的研究中,能源问题是面临的一个极具挑战性的问题。例如在类人型机器人中一般用直流电动机作为驱动装置,电池作为能源提供装置。由于电池电量、体积及技术上的限制,不能持久地为下肢外骨骼提供能源,例如:日本研制的P3机器人,体重130kg,由质量达30kg 的电池为其供电,机器人仅活动25m in 电量即被耗尽。而直流电动机产生的力矩也不足以使下肢外骨骼用于士兵的负重。为了提高下肢外骨骼承载能力及待机时间,世界各国都在努力研究用于下肢外骨骼的有效能源与驱动技术,例如Kazer ooni 等人试制了气动控制装置[25],用气动力来为下肢外骨骼提供能源。M ichael Goldfarb 等设计的流体推进式能源驱动器[26]是用液动力作为驱动能源。这两种方式的驱动设备
3
2008年10月赵彦峻,等:人体下肢外骨骼关键技术分析与研究
能产生大的驱动力,可以作为承担重负载的下肢外骨骼的能源供应设备,但仍有许多问题需要解决:体积过大问题,驱动欠柔顺问题,气、液使设备产生的振动问题,加压的液、气体存放问题,以及驱动设备的质量问题等。必须寻求理想的能源供应设备,研究合适的驱动方法。因此,能源与动力技术仍旧是解决下肢外骨骼运动的一个非常关键的技术。
下肢外骨骼周身布满了传感器,各种各样的传感器为信息的获得提供了可能,因此传感器测量技术与传感器数据融合技术也是下肢外骨骼研究中的一个关键技术。
3 结束语
人体下肢外骨骼要真正用于实践,特别是用于战场,除解决以上关键技术之外,需考虑的问题还很多,如:下肢外骨骼的质量问题、柔性问题、噪音问题,舒适度问题等。比如士兵穿着下肢外骨骼走、跑、跳及跨越障碍物时的步态调节,是否能真正达到与人的同步,会不会成为人行走的障碍,能不能达到所期待的协调性;驱动设备的设计与选取,能否实现小体积大驱动力要求,能否实现机构的柔顺控制和信息反馈;执行机构是否能达到要求的灵活与轻巧度,能否达到与人体的柔性接触。这些问题都是需要考虑和必须实现的,也是未来下肢外骨骼研究的方向与重点。
以上就目前国内外在人类下肢外骨骼研究领域的最新研究发展动态进行了综述与分析,并对下肢外骨骼关键性技术与问题进行了探讨与研究,为下肢外骨骼的进一步设计与开发提供了较详实的信息与参考依据。
参考文献
[1] 董跃农.轻兵器装备第四次浪潮:士兵系统[M].北京:国防工
业出版社,2006.
[2] Kazer ooni H.Human2r obot interacti on via transfer of power and inf or2
mati on signals[J].I EEE Trans.on Syste m s and Cybernetics,1990,
20(2):42-49.
[3] 清化同方.虚拟现实与系统仿真[DB/OL].htt p://www.nuist.
https://www.doczj.com/doc/e615210217.html,/courses/jsj/G D_jsj_011b/text/chap ter2/sec1/part2/l8.
ht m,2007.
[4] Pratt J,Krupp B,Morse c,et al.The r oboknee:an exoskelet on f or
enhancing strength during walking[C].I n:I EEE conf.on Robotics
and Aut.,Ne O rleans,2004:2430-2435.
[5] 中国公众科技.能搬运100kg重物的“外部骨架”[DB/OL].周
道其,译.htt p://www.cp https://www.doczj.com/doc/e615210217.html,/kjxp/2004_07/1089013003.
ht m l,2004.
[6] H ir oaki Kawa mot o,Yoshiyuki Sankai.Power assist method based on
phase sequence driven by interacti on bet w een human and r obot suit
[C].I n:13th I EEE internati onal workshop on r obot and human in2
teractive communicati on,Kurashiki,Okaya ma Japan,2004:491-
496.
[7] Ka wa mot o H,Sankai https://www.doczj.com/doc/e615210217.html,f ortable power assist contr ol method f or
walking adi by HAL23[C].I n:Syste m s,Man and Cybernetics,
2002I EEE I nternati onal Conference,2002:6-9.
[8] Ka wa mot o H,Kanbe S,Sankai Y.Power assist method for HAL23
esti m ating operat or’s intenti on based on moti on infor mati on[C].I n:
Robot and Human I nteractive Communicati on,M illbrae,US A,
2003:67-72.
[9] Andre Dhu,Kazer ooni H,Ada m Zoss.On the bi om i m etic design of
the berkeley l ower extre m ity exoskelet on[C].I n:I EEE I nternati onal
Conference on Robotics alad Aut omati on,Barcel ona,Spain,2005:
4345-4352.
[10] Sarah Yang.UC berkeley researchers devel op ing r obotic exoskelet on
that can enhance human strength and endurance[DB/OL].htt p://
https://www.doczj.com/doc/e615210217.html,,2004-03-03.
[11] Kazer ooni H.The human power a mp lifier technol ogy at the university
of california berkeley[J].Journal of Robotics and Aut onomous sys2
tem s,1996,19:179-187.
[12] Low K H,L iu Xiaopeng,Hao Yong Yu,et al,Devel opment of a
l ower extre m ity exoskelet on p reli m inary study f or dyna m ic walking
[C].I n:20048th internati onal conference on contr ol,Aut omati on,
Robotics and V isi on Kunm ing,China,2004:1343-1349. [13] Yand Can2jun,N iu B in,Chen ying.Adap tive neur o2fuzzy contr ol
based devel opment of a wearable exoskelet on leg f or human walking
power aug mentati on[C].I n:Pr oceedings of the2005I EEE/AS ME
internati onal conference on advanced intelligent mechatr oincsMonter2
ey,California,US A,2005:2457-2463.
[14] MVukobrat ovic.B i ped l ocomoti on:dyna m ics,stability,contr ol and
aapp licati on[M].Berlin:Sp ring Verlag,1990.
[15] Vukobrat ovic M,Bor ovac B.Zer o2moment point———thirty five years
of its life[J].I nternati onal Journal of Humanoid Robotics,2004,1
(1):157-173.
[16] 殷晨波,周庆敏,徐海涵,等.基于虚拟零力矩点FZ MP的拟人机
器人行走稳定性仿真[J].系统仿真学报,2006(9):2593-
2597.
[17] Kajita S,Kanehir o F,Kaneko K,et al.B i ped walking patern gener2
ati on by using p revie w contr ol of zer o2moment point[C].I n:p r o2
ceedings of the2003I EEE I nternati onal Conference on Robotics&
Aut omati on,Tai w an,2003:1620-1626.
[18] Ogura Y.Stretch walking pattern generati on for a bi ped humanoid r o2
bot[C].I n:Pr oceedings of2003I nternati onal Conference in I ntelli2
gent Robots and Syste m https://www.doczj.com/doc/e615210217.html,s Vegas,Nevada,2003:352-357. [19] Kazer ooni H,Jean Louis Racine,Huang L ihua.On the contr ol of the
berkeley l o wer extre m ity ex oskelet on[C].I n:I nernati onal Conference
on Robotics and Aut o mati on Barcel ona,S pain,2005:4353-4360.
[20] 郑秀瑗.现代运动生物力学[M].北京:国防工业出版社,
2002.
[21] Kawa mot o H.,Sankai https://www.doczj.com/doc/e615210217.html,f ortable power assist contr ol method for
walking aid by HAL23[J].I EEE I nternati onal Conference on Sys2
tem s,Man and Cybernetics,2002,4:54-61.
[22] Lee S,Sankai Y.Power assist contr ol f or walking aid with HAL23
based on E MG and i m pedance adjust m ent ar ound knee j oint[C].I n:
I ntelligent Robots and https://www.doczj.com/doc/e615210217.html,usanne:I EEE/RSJ I nternati onal
Conference,2002:1499-1504.
[23] Kawa mot o H,Suwoong Lee,Kanbe S,et al.Power assist method for
HAL23using E MG2based feedback contr oller[C].I n:System s,Man
and Cybernetics,I EEE I nternati onal Conference on Volume2,2003:
1648-1653.
[24] Sunghoom Ki m,George Anwar,Kazeooni H.H igh2s peed communi2
cati on net w ork f or contr ols with the app licati on on the exoskelet on
[C].I n:Pr oceeding of American contr ol conference Bost on,Massa2
chusetts,2004:355-360.
[25] Kazer ooni H,Pneumatic f orce contr ol f or r obotic syste m s[C].I n:
I EEE I nternati onal Conference on Mechatr onics,Istanbul,Turkey,
2004:231-236.
4机 械 设 计第25卷第10期
C OSMOSMoti on在摆线轮设计中的应用3
韩双江,孙传祝
(山东理工大学机械工程学院,山东淄博 255049)
摘要:针对摆线针轮行星减速器的摆线轮齿廓形状复杂、加工制造难度大、目前还不能实现共轭切削加工等问题,根据摆线成形原理及设计要求,利用Solid Works软件及其C OS MOS Moti on插件,通过运动仿真探讨了绘制准确摆线轮齿廓的方法。在此基础上,利用S olid Works建立摆线轮的三维实体模型,为摆线轮的设计与研究提供了一种方法,使其设计更为生动和直观,并且简化了设计过程。
关键词:摆线轮;齿廓曲线;Solid Works;COS MOS Moti on;建模
中图分类号:TH703.61 文献标识码:A 文章编号:1001-2354(2008)10-0005-03
随着计算机辅助设计制造技术的飞速发展,计算机仿真技术已成为工程技术人员极其重要的科研工具,文中利用计算机仿真技术精确地绘制出摆线轮的齿廓曲线,简化了摆线轮齿廓的绘制过程,研究结果对提高摆线轮设计的速度和质量具有一定的实际意义。
COS MOS Moti on是为广大用户提供的实现数字化功能样机的优秀工具,它与当今主流的三维C AD软件S olid Works无缝集成,是全功能的运动仿真软件,可以建立各种复杂运动机构的精确运动模型,并对运动机构进行完整的运动学和动力学仿真,得到机构中各零部件的运动数据,分析机构中零件的位移、速度、加速度、作用力与反作用力等,并以图形、动画、表格等多种形式输出运算结果。大大简化了机构的设计开发过程,缩短了开发周期,减少了开发费用,同时又提高了产品质量。总之, COS MOS Moti on功能强大,求解可靠,仿真结果与实际情况十分吻合,完全能够满足用户对运动仿真的各种需求[1]。
作为普通减速机的更新换代产品,摆线针轮行星减速器与普通减速机相比,具有结构紧凑、传动比大、传动效率高、多齿啮合、承载能力大等突出优点。摆线针轮行星减速器以其输入输出同轴、多齿啮合的新颖结构,广泛应用于矿山、冶金、工程机械及化工等行业的驱动装置和减速装置中[2]。摆线针轮传动采用圆柱面针齿与具有短幅外摆线等距曲线齿面的摆线轮相啮合,摆线轮齿面形状极为复杂,但对整个系统的承载能力与精度有极大影响,因此齿面的造型也极为重要[3]。摆线轮的齿廓形状因其特殊性给加工制造增加了难度,至今其齿廓还不能实现共轭切削加工,因此摆线轮的加工必须由齿廓外形图来提供支持[4]。利用C OS MOS Moti on的仿真功能可以很精确地将摆线轮的齿廓形状表达出来,所以,探讨利用C OS MOS Moti on进行摆线轮的三维设计方法具有实际的意义。
1 摆线轮齿廓曲线成形原理
齿廓成形原理是绘制齿廓曲线的依据,形成外摆线的方法有内滚法和外滚法[5]。内滚法如图1所示,以半径为r
c
′的圆作
固定圆,用半径为r
p
′的圆作为滚动圆套在固定圆外面,两圆的
半径差就是其中心距,即a=r
p
′-r
c
′。当滚动圆绕固定圆滚过
全周长2πr
p
′时,与滚动圆同步滚动的任何一点均可形成一条完整的外摆线,这种形成外摆线的方法称为内滚法。如果该点
位于滚动圆的圆周上(如图1中的P
点),由P
点形成的外摆
线P
P′P1称为普通外摆线。当该点位于滚动圆之外时(如图1
[26] M ichael Goldfarb,Eric J Barth,M ichael A Gogola,et al.Design
and energetic characterizati on of a liquid2p r opellant2powered actuat or
for self2powered r obots[J].Mechatr onics,2003,8(2):79-87.
Key technolog i ca l ana lysis and study on exoskeleton of hu2 man2body lower li m bs
ZHAO Yan2jun,XU Cheng,ZHANG J i n g2zhu,L UO Y u2fe i
(School of Mechanical Engineering,Nanjing University of Sci2 ence and Engineering,Nanjing210094,China)
Abstract:A l ong with the continuous upgrade of weapon equi p2 ments for individual s oldier,the weight p r oblem has becom ing an obstacle on the flexibility and survivability f or the individual s oldier warfare.The exoskelet on device of hu man2body l ower li m bs could enhance the l oad bearing capability of s oldier,enable the s oldier t o trudge a l ong distance with heavy burden on a r oad surface incapa2 ble for vehicle t o travel,fully bring int o p lay the advantages of hu2 man and machinery t o realize a perfect combinati on on the agility, flexibility and wisdom of hu man with the r obustness of machinery. The latest trends of research and devel opment both at home and a2 br oad of the current research domain on the exoskelet on of hu man2 body l ower li m bs were intr oduced,and analysis and exp l orat ory re2 search on its key technol ogy were carried out,thus p r ovided full and accurate inf or mati on and referential basis f or the further design and devel opment on the exoskelet on of hu man2body l ower li m bs.
Key words:exoskelet on;bi ped walking;stability;individual s oldier;equi pment
Fig9Tab0Ref26“J ixie Sheji”7689
第25卷第10期2008年10月
机 械 设 计
JOURNAL OF MACH I N E DESI G N
Vol.25 No.10
Oct. 2008
3收稿日期:2008-01-22;修订日期:2008-03-19
作者简介:韩双江(1983-),男,山东德州人,学士,专业方向:机械设计制造及自动化,发表论文1篇。
人体运动学重点整理 第一章人体运动学总论 一、名词解释 1、人体运动学:就是研究人体活动科学的领域,就是通过位置、速度、加速度等物理量描述与 研究人体与器械的位置岁时间变化的规律活在运动过程中所经过的轨迹,而不考虑人体与器械运动状态改变的原因。 2、刚体:就是由相互间距离始终保持不变的许多质点组成的连续体,它有一定形状、占据空 间一定位置,就是由实际物体抽象出来的力学简化模型。在运动生物力学中,把人体瞧作就是一个多刚体系统。运动形式有平动、转动与复合运动。 3、复合运动:人体的绝大部分运动包括平动与转动,两者结合的运动称为复合运动。 4、力偶:两个大小相等、方向相反、作用线互相平行,但不在同一条直线上的一对力。 5、人体运动的始发姿势:身体直立,面向前,双目平视,双足并立,足尖向前,双上肢下 垂于体侧,掌心贴于体侧。 6、第三类杠杆:其力点在阻力点与支点的中间,如使用镊子,又称速度杠杆。此类杠杆因 为力臂始终小于阻力臂,动力必须大于阻力才能引起运动,但可使阻力点获得较大的运动速度与幅度。 7、非惯性参考系:把相对于地球做变速运动的物体作为参考系标准的参考系叫非惯性参考 系,又称动参考系或动系。 8、角速度:人体或肢体在单位时间内转过的角度,就是人体转动的时空物理量。 9、人体关节的运动形式: (1)屈曲(flexion)、伸展(extension):主要就是以横轴为中心,在矢状面上的运动。 (2)内收(adduction)、外展(abduction):主要就是以矢状轴为中心,在前额面上的运动。 (3)内旋(internal rotation)、外旋(external rotation):主要就是以纵轴为中心,在水平 面上的运动。 (4)其她:旋前(pronation)、旋后(supernation)、内翻(inversion)、外翻(eversion)。 二、单选题 【相关概念】 ·第一类杠杆:又称平衡杠杆,其支点位于力点与阻力点中间,如天平与跷跷板等。主要作 用就是传递动力与保持平衡,它即产生力又产生速度。
人体运动学:是研究人体活动科学的领域。是通过位置、速度、加速度等物理量描述和研究人体和器械的位置随时间变化的规律或在运动过程中所经过得过的轨迹,而不考虑人体和器械运动状态改变的原因。 功能解剖学:研究运动器官的结构是如何适应其生理动能的学科。 生物力学:研究生物体机械运动的规律,以及力与生物体的运动、生理、病理、之间关系的学科。 运动生物力学:研究运动中人体和器械运动力学规律的学科。 应力:指人体结构内某一平面对外部负荷的反应,用单位面积上的力表示,(N/cm2)刚体:是由相互间距离始终保持不变的许多质点组成的连续体,他有一定形状、占据空间一定位置,是由实际物体抽象出来的力学简化模型。 力矩:是力对物体转动作用的量度,是力和力臂的乘积。 阻力点:阻力杠杆上的作用点,是指运动阶段的重点、运动器械的重力、摩擦力或弹力以及拮抗肌的张力,韧带、筋膜的抗牵张力等造成的阻力。他们在一个杠杆系统中的阻力作用点只有一个,即全部阻力的合力作用点为唯一的阻力点。 力偶:通常把两个大小相等、方向相反、作用线互相平行,但不在同一条直线上的一对力称为力偶。 梅脱:能量代谢当量。每公斤体重从事1分钟活动,消耗3.5毫升的氧,其运动强度为1MET 第三类杠杆:其力点在阻力点和支点的中间,又称速度杠杆。 人体的始发姿势:身体直立,面向前,双目平视,双足并立,足尖向前,双下肢下垂于体侧,掌心贴于体侧。 心脏的功能能力:指机体在尽力活动时达到的最大MET值。或者,在有氧范围内机体所能完成的最大强度活动的最大MET值。或者,心脏功能容量/体力功能容量,指体力活动的能力。健康人,心脏的功能能量相当于最大吸氧量相应的MET值。 稳定角:是中心垂直投影线和重心至支撑面边缘相应点的连线间的夹角。是影响人体平衡稳定性的力学因素。 稳定系数:为倾倒力开始作用时稳定力矩与倾倒力矩的比值。 复合运动:人体的绝大部分运动包括平动和转动,两者结合的运动称为复合运动。转动惯量:物体的转动惯量是物体转动惯性的大小。 惯性参考系:把相对于地球静止的物体或相对与地球做匀速直线运动的物体作为参考标准的 参考系叫做惯性参考系。 Gou软骨:是幼年时期位于骨干gou端处的软骨,参与骨的生长。成年后。Gou软骨板骨化后遗留成骨垢线,骨的生长也随之停止。 骨单位:是骨密质的基本结构单位。位于骨内、外环骨板之间,是骨干骨密质的主体。从骨单位的横断面可以看到同心平行分布的骨板,成为不同直径的、一层套一层的封闭的圆柱。 骨松质:分布于长骨的骨gou,和骨干的内侧面。由数层排列的骨板和骨细胞构成大量针状或片状骨小梁,并相互连接成多孔隙网架结构,网孔即骨髓腔,其中充满红骨髓。 骨密质:由有机质和无机质构成。 骨组织:由大量钙化的细胞间质(骨基质)和细胞构成 成骨细胞:位于成骨活跃的骨组织表面或紧紧包靠在临近成骨细胞上。常成层排列,胞体呈立方形或矮柱状。 破骨细胞:常位于骨组织表面。是一种多核的大细胞,直径100um,含有2—50个核。 骨细胞:单个分布于骨板内或骨板间,胞体较小,呈扁椭圆形,有许多细长突起,胞质弱嗜碱性。 骨钙化:主要指在成骨细胞合成并分泌骨的有机成分(有机基质)后,在一定的条件下,无机盐有序地沉积于有机质内的过程。 骨强度:指骨在承载负荷的情况下抵抗破坏的能力,是衡量骨承载能力的指标之一。 骨应力—应变曲线;表示应力和应变之间的关系的曲线。分弹性变形区和塑性变形区。 拉伸载荷:股的两端受到一对大小相等、方向相反沿轴线的载荷。 骨的各向异性:骨的结构为中间多孔介质的夹层结构材料,这种材料称为各向异形体,因其不同方向的力学性质不同,称各向异性。 应力性骨折:指骨长期承受反复负荷后发 生微损伤而逐渐形成的骨折。他是由于损 伤的不断积聚,超过机体修复能力,继而 产生的骨折。 股外表再造:骨外表形状的改变称为外表 再造,是骨适应其承载而做出的适应性变 化,可以表现为骨最优化的形状。 1运动学中的坐标系是三维的。有三个面: 水平面(与地面平行的面,把人体分为上 下两部分),额妆面(与身体前或后平行 的面,分成前后两部分),矢状面(与身 体侧面平行的面,分为左右两部分)。每 两个面交出的面称为轴,也有三个:横轴 (与地面平行且与额妆面平行的轴)、纵 轴(额妆面与矢状面相交叉形成、上下贯 穿人体正中的轴)、矢状轴(与地平面平 行且又与矢状面平行的轴,在水平面前后 贯穿人体) 2何谓骨的载荷和骨的应力?骨应力常有 哪几种?对骨有何生理意义?作用在骨 表面的各种外力,即骨的载荷。当外力作 用于骨时,骨以形变产生内部的阻抗力以 抗衡外力,即是骨产生的应力。应力的大 小等于作用于骨截面上的外力与骨横断 面面积之比,单位为Pascal,即牛顿/平方 米。骨的应力根据作用于骨的力不同而不 同,常见的应力由压应力、拉应力及剪切 力等。应力对骨的改变及在生长和骨的吸 收中起调节作用,应力不足会使骨萎缩, 应力过大也会使骨萎缩。因此,对于骨来 说,存在一个最佳的应力范围 肌力:又称最大力量是肌收缩时所表现出 来的能力,以肌最大兴奋时所能负荷的重 量来表示。 肌耐力:又称力量耐力,是指肌在一定负 荷条件下保持收缩或持续重复收缩的能 力,反映肌持续工作的能力,体现肌对抗 疲劳的水平。 向心运动:也称向心收缩是指肌收缩时, 肌的长度缩短,两端附着点互相靠近。 离心运动:也称离心收缩是指肌收缩时肌 力低于阻力,使原先缩短的肌被动延长。 主动肌:直接完成动作的肌群称为原动 机,其中起主要作用者称为主动机。 运动单位:肌收缩必须有完好的神经支 配,一个前角细胞,它的轴突和轴突分支, 以及它们所支配的肌纤维群,合起来称为 运动单位。 肌的生理横断面:肌由肌纤维组成,每条 肌纤维的横断面总和称为肌的生理横断 面。 爆发力:是指在最短的时间内发挥肌力量 的能力。 拮抗肌:与原动肌作用相反的肌群称为拮 抗肌。 神经适应:由运动引起的神经系统的适应 性变化称为神经适应。 协同动作:多个肌群在一起工作所产生的 合作性动作被称为协同动作。 简述肌的功能。 肌的功能是运动、支撑骨骼、维持姿势、 保护身体和产热。 简述肌力的影响因素。 肌的生理横断面、肌的初长度、肌的募集、 肌纤维走向与肌腱长轴的关系和杠杆效 率。 牵拉—缩短周期的弹性势能增强的机制。 以牵拉—缩短周期肌运动为主的自然运 动,包含主要由离心运动引起的高强度的 力的调节性释放,这种高强度的力有利于 肌-腱复合体中弹性应变能量的贮存,即有 效增加弹性势能,使离心运动后的向心运 动比单纯的向心运动做功更强,也更为有 效。 简述超量恢复原理。 运动和运动后肌经历一个疲劳与恢复过 程,肌疲劳时,其收缩力量、速度和耐力 都会明显下降,同时肌内能源物质、收缩 蛋白和酶蛋白都有所消耗,在休息后的恢 复过程中,上述已消耗物质得到补充、生 理功能逐渐得到恢复,并超过运动前的水 平,这即是肌超量恢复。 简述长期运动训练对肌底物水平的影响。 *糖原:耐力训练引起的肌的适应性改变 是肌静息糖原含量增加。 *三磷酸腺苷和磷酸肌酸:多回合的力量 练习可使三磷酸腺苷和磷酸肌酸储备降 低,这种急性的代谢反应为增加高能磷酸 化合物储备能力提供适应性刺激,长期的 适应性结果则表现为肌静息磷酸盐水平 提高。 *脂质:肌脂质含量无显著不同,即对运 动刺激呈惰性表现。 *肌红蛋白:肌中肌红蛋白对氧的运输起 着重要的作用。尽管慢肌纤维通常比快肌 纤维含有更多的肌红蛋白,但耐力训练不 能促进人体肌中肌红蛋白含量的增加。力 量训练后肌纤维体积虽然增大,但肌中肌 红蛋白含量却相应降低,以适应氧化酶含 量降低的肌环境。 简述运动控制理论和运动控制方式。 根据Horak的运动控制理论“正常运动控 制是指中枢神经系统运用现有及以往的 信息将神经能转化为动能并使之完成有 效的功能活动。”运动控制主要有以下三 种方式。 (1)反射性运动:反射性运动形式固定、 反应迅速不受意识控制。主要在脊髓水平 控制完成。(2)模式化运动:模式化运动 有固定的运动形式、有节奏和连续性的运 动,受意识控制。主观意识主要控制运动 的开始与结束,运动由中枢模式控制器调 控。(3)意向性运动:整个运动过程均受 主观意识控制,是有目的的运动,需通过 运动学习来掌握,随着不断进行运动而趋 于灵活,并获得运动技巧。 简述腰背肌对脊柱稳定及其功能的影响。 肌对脊柱具有保护脊柱稳定和协同脊柱 运动的双重作用,并发挥主动调节功能, 这是调节脊柱平衡的关键要素。相关功能 肌群主要是腰肌和背肌。背肌主要包括浅 层的背阔肌和深层的骶棘肌。腰肌主要包 括腰方肌和腰大肌,此外间接作用于腰脊 部脊柱的肌有:腰前外侧壁肌、臀大肌、 臀中肌、臀小肌、肱二头肌、半腱肌及半 膜肌等。这些肌群的协调配合,以实现脊 柱对身体的支撑,负重、减震、保护和运 动等功能。 简述肌功能障碍的原因。 1.运动损伤 2.疼痛 3.中枢神经损伤 4.外周神经的损伤 简述肌电刺激增强肌力的机制。 肌电刺激后肌的收缩性能增强,呈现显著 的力量增益,肌电刺激作用主要原理如 下: *肌对电刺激的适应性反应:肌电刺激对 肌收缩力的影响受神经因素影响,遵循负 荷大小原则,依此原则肌产生与之适应的 兴奋激发与力量变化,并随负荷的增大, 产生更大的适应性反应。 *激发运动神经元,动员运动单位。 肌电刺激不是直接兴奋肌,而是刺激电流 沿着肌内较易兴奋的神经末梢传导。通过 激发较大运动神经元,动员更多的运动单 位,使肌纤维产生与之适应的反应,肌的 收缩性能增强。 *增强氧化酶和糖原,提高肌耐力。 长时间、低频率的肌电刺激能够引起低等 哺乳动物快肌纤维氧化酶和糖原合成酶 的显著增加,使快肌纤维的退化和萎缩, 并向慢肌纤维的转变;而对慢肌纤维的影 响主要表现为线粒体含量增加。这有利于 提高肌耐力,增强运动个体抗疲劳的能 力。 简述姿势协同动作的运动模式及其平衡 作用。 姿势协同动作通过三种运动模式对付外 力或支持面的变化以维护站立平衡,即踝 关节协同动作模式、髋关节协同动作模式 及跨步动作模式。踝关节协同动作指身体 重心以踝关节为轴心,进行前后转动或摆 动,类似钟摆运动。髋关节运动模式是通 过髋关节屈伸来调整身体重心和保持平 衡。跨步动作模式是通过向作用力方向快 速跨步来重新建立重心的支撑点或站立 支持面以建立新的平衡。当身体重心达到 稳定极限时,为了防止跌倒或失去平衡, 上肢、头和躯干运动以建立反应性平衡。 简述肌组织过度应变与损伤特征。 *肌纤维组织应变与肌运动和关节活动有 关。 *肌—腱连接对应变引起的损伤特别敏 感,并可导致肌—腱连接的生物形态学和 生物化学改变。 *疲劳性的运动中易出现肌应变性损伤。 *强大应力与应力变化易导致肌损伤。 肌腱袖:是由冈上肌、冈下肌、小圆肌和 肩胛下肌所组成的腱性组织,以扁宽的腱 膜牢固的附着于关节囊的外侧肱骨外科 颈,有悬吊肱骨、稳定肱骨头、协助三角 肌外展肩关节的功能。 网球肘:又称肱桡关节滑囊炎、肱骨外上 髁炎、是前臂伸腕肌群的起点部反复受到 牵拉刺激,而引起的一种慢性损伤性疾 病。 Colles骨折:是桡骨远端,距关节面2.5cm 以内的骨折,常伴有远侧骨折端向背侧倾 斜,前倾角度减少或呈负角,典型者伤手 呈银叉畸形。 Dugas征:即搭肩实验阳性正常人肘部贴 近胸部时,手掌可触到健侧肩膀。有肩关 节脱位时患侧上肢屈肘,肘部贴近胸壁 时,手掌不能摸到肩峰,若以手掌触摸肩 峰时,则肘部不能贴近胸壁,是为阳性。 Tinel征:是周围神经外科最重要的诊断 方法之一,指叩击神经损伤或神经损害的 部位或其远侧,而出现其支配皮区的放电 样麻痛感或蚁走感,代表神经再生的水平 或神经损害的部位。 Phalen实验:两臂平举,肘区60度,腕 关节极度掌屈1分钟,患手桡侧手指即可 出现麻木和感觉异常。 鼻烟窝:其近侧为桡骨茎突,桡侧界为拇 长展肌及拇短伸肌腱,尺侧界为拇长伸肌 腱,窝底为手舟骨和大多角骨,其内有桡 动脉通过。 鱼际:由四块运动拇指的肌肉组成,各肌 主要起自屈肌支持带,作用于肌肉的名称 相同。除拇短屈肌由正中神经和尺神经双 重支配,拇收肌由尺神经支配外,其余两 肌均由正中神经支配。这群肌肉可以使拇 指屈曲、内收、外展和对掌运动。 Q角:是股四头肌肌力线和髌韧带力线的 夹角,即从髂前上棘到髌骨中点的连线为 股四头肌肌力线,髌骨中点至胫骨结节最 高点连线为髌韧带力线,两线所形成的夹 角为Q角。 半月板:股骨和胫骨间左右各一块软骨衬 垫,即半月板 鹅足:缝匠肌、股薄肌和半腱肌肌腱的止 点是在胫骨内侧髁稍下方的前内侧面上, 其腱纤维与小腿深筋膜互相交织形成鹅 足 足弓:由7块跗骨、5块跖骨及其关节、 韧带、腱膜组成的向足背突出的弓形骨骼 结构 步态周期的支撑相:指下肢接触地面和承 受重力的时间,占步行周期的60%,支撑 期大部分时间是单足支撑 步态周期的摆动相:指足离开地面向前迈 步再到落地之间的时间 步态周期:行走过程中,从一侧脚跟着地 开始到该脚跟再次着地构成一个步态周 期。 简述肩肱关节的构成、结构特点和运动形 式。 由肩胛骨的关节盂与肱骨头连接而成的 球窝关节,因肱骨头的面积远远地大于关 节盂的面积,且韧带薄弱、关节囊松弛, 故肩肱关节是人体中运动范围最大、最灵 活的关节。关节盂为一上窄下宽的长圆形 凹面,向前下外倾斜,盂面上被覆一层中 心薄、边缘厚的玻璃样软骨,盂缘被纤维 软骨环即关节盂唇所围绕。关节盂唇加深 关节盂凹,有保持关节稳定的功能。 肱骨头为半圆形的关节面,向后、上、内 倾斜,仅以部分的关节面与关节盂接触, 故极不稳定。肱骨大结节朝向外侧,构成 结节间沟的外壁,小结节朝向前侧,成为 结节间沟的内壁。肱二头肌的长健经过结 节间沟,并随着关节活动而上下滑行。 肩关节的主要韧带有喙肩韧带、盂肱韧带 和喙肱韧带 肩部关节的运动比较复杂,各关节既有单 独运动,又有相互间的协同运动,有内收、 外展、前屈、后伸、内外旋转等运动,以 及由这些运动综合而成的环转运动。 简述肩关节运动的主要肌 上提:斜方肌上部、菱形肌、肩胛提肌 下降:斜方肌下部、胸小肌、锁骨下肌(补 充)背阔肌、胸大肌 内收:菱形肌、斜方肌,肩胛提肌 外展:前锯肌、胸小肌(补充)胸大肌 屈曲:三角肌前部、胸大肌锁骨部、(补) 喙肱肌、肱二头肌短头(外旋位) 伸展:三角肌后部、背阔肌、大圆肌、(补) 肱三头肌长头(内旋位) 外展:冈上肌、三角肌中部、(补)肱=头肌 长头(外旋位)、脓三肌长头(内旋位 内收:胸大肌、背阔肌、大圆肌、(补)三 角肌后部 外旋:冈下肌、小圆肌、(补)三角肌后部 内旋:胸大肌、肩胛下肌、大圆肌、背阔 肌、(补)三角肌前部 环转运动:屈伸、内收外展及内外旋的复 合运动。 简述肘关节的构成、结构特点和运动形 式。 肘关节是一个复合关节,由肱尺关节、肱 桡关节、桡尺近侧关节三个单关节,共同 包在一个关节囊内所构成。 肱尺关节:由肱骨滑车与尺骨滑车切迹构 成,属滑车关节,可绕额状轴作屈、伸运 动。 肱桡关节:由肱骨小头与桡骨头关节凹构 成,是球窝关节,可作屈、伸运动和回旋 运动。因受肱尺关节的制约,其外展、内 收运动不能进行。 桡尺近侧关节:由桡骨环状关节面与尺骨 的桡切迹构成,为圆柱形关节,只能作旋 内、旋外运动。 有关韧带有尺侧副韧带、桡侧副韧带、桡 骨环状韧带等。 主要运动形式有屈伸、其次是桡尺近侧关 节与桡尺远侧关节联合运动,完成前臂的 旋内、旋外运动。 精品文档
大连理工大学 硕士学位论文 人体下肢运动分析 姓名:王晏 申请学位级别:硕士专业:通信与信息系统指导教师:孙怡 20050317
摘要 近些年来,人体运动的跟踪与分析在图像处理和计算机视觉领域引起许多学者的关注。这一课题在智能监视系统、虚拟现实、高级用户接口、运动分析和基于模型的图像编码等方面具有广阔的应用前景。利用图像序列进行人体运动的跟踪与分析包含四个基本内容:(1)从背景中提取运动目标;(2)从运动目标中分出人体目标;(3)运动人体的跟踪;(4)人体行为的理解与描述。其中,人体运动的跟踪和标定是人体运动跟踪与分析过程的关键,是进一步识别和理解人体运动行为的基础。本文提出了一种行走人体下肢关节点定位的算法。该算法是根据人行走时呈现的几何特性对人体的下肢关节点进行定位。 行走人体下肢关节定位算法处理的是由摄像机摄入的视频图像序列。首先经过背景去除,把人体区域从图像中提取出来。在得到干净的人体区域后,就可以获得人体的高度和宽度参数,以便进一步实现下肢关节点的定位。 经过背景去除和获得高度参数后,就要根据人体行走时所呈现的几何特征进行下肢关节点的定位。本文首先对侧面行走人体下肢关节点进行了定位。人在侧面行走时腿部长度是无失真的,因此,根据腿部的长度约束和关节点的运动约束进行了关节点定位。本文继而对正面行走人体下肢关节点进行了定位,对于正面行走的人体,其腿部长度在二维图像中有时会出现失真,因此,不能简单的根据腿部的长度约束进行定位。本文针对正面行走人体腿部边缘特性,结合腿部长度约束对膝关节进行了定位,并且根据腿部边缘特点对人体小腿长度进行了调整,运用调整后的小腿长度约束对人体踩关节进行了定位。在侧面行走人体和正面行走人体下肢关节定位的研究基础上,进一步研究了任意行走姿态下人体髋关节和膝关节的定位。根据人体行走时腿部的边缘信息用直线拟合的方法,并且结合腿部长度约束进行了膝关节的定位。 论文给出了侧面、正面以及任意行走姿态下人体下肢关节点定位的实验结果。对于侧面行走人体,本文检验了两种人体模型软件生成的人体行走序列,并且对实际拍摄的侧面人体行走序列也进行了髋关节和膝关节的定位。对于正面和任意行走姿态下的人体,只检验了由POSER3.0生成的模型序列。实验结果表明,本文所提出的算法可以对行走人体的下肢关节点进行较为准确的定位,并且算法简单易行,可
人体下肢外骨骼机理分析 xx (xx,xxxx,xxxx) 摘要:本论文研究穿戴型下肢外骨骼机器人机构。所研究的外骨骼是一种可以穿戴于人体的机械装置。这种外骨骼依靠人的运动信息来控制机器人,通过机器人来完成仅靠人的自身能力无法单独完成的远行、负重等任务。这种外骨骼也可以用来检测人体运动信息,作为康复医疗器械使用。下肢穿戴外骨骼机器人是一种具有双足步行特征的典型的人机一体化系统。 关键词:穿戴外骨骼;助力机器人;机构设计;仿真分析 ANALYSIS AND DESIGN OF LOWER EXTREMITY EXOSKELETON (Mechanical Manufacturing and Automation.,No.:xxxxxxxx,Email:xxxxxxxx@https://www.doczj.com/doc/e615210217.html,, phone:xxxxxxxxxxx) Abstract:This paper researched a kind of wearable lower extremity exoskeleton robot. The exoskeleton is a mechanism which could match the human body. It relied on human motion information to control the robot, and accomplish the travel, loading and other tasks that can not be completed by people's own capacity lonely. The exoskeleton can also be used to detect human motion information, and as the rehabilitation of medical devices. Lower extremity exoskeleton robot is a kind of typically man-machine integrated system with some biped walking robots’ characters. Keywords:Wearable exoskeletons; Assist robot; Mechanical design; Simulation and Analyze 1引言(Introduction) 外骨骼是一种给人穿戴的人机一体化 智能机械装置,它将人类的智力和机械装置的“体力”结合在一起,靠人的智力来控制机械装置,通过机械装置来完成仅靠人的自身能力无法单独完成的任务。下肢外骨骼是一种用来辅助人们行走的人机系统,它将人和两足步行机器人结合在一起,利用人的运动控制能力来控制机器人的行走,简化了自主行走式两足机器人最为常见的步态规划 和步态稳定性问题,同时它又为人类的行走提供动力协助,增强人类行走的能力和速度,特别是能够缓解人在大负重和长时间行走 情况下极易出现的疲劳感,大大扩大人类的运动范围,能够增强个人在完成某些任务时的能力。人体下肢外骨骼作为单兵系统的一部分,起到了提高士兵承载能力的作用,避免了士兵由于沉重负荷而导致的身体机能 的下降,从而提高了士兵的抵抗能力,对最终提高士兵的战斗力和生存力起到了重要 作用。故可用于军事、科考、旅游、交通等各方面,具有广泛的应用前景。 2人体外骨骼的研究背景(The background of exoskeletons) 人体下肢外骨骼机器人成为机器人领域的一个热门分支,已越来越受到学术界和工业界关注。目前,国外特别是美国、日本在这方面已经取得了巨大的进展,并逐步商业化,成为新兴产业。但国内仅有少数科研单位从事可穿戴助力机器人的研究,起步较晚,基本处在实验室试制阶段,离实用还有一定的距离。
人体运动学考试重点 第一章总论 1、人体动力学概念(8):是运用力学的原理与方法研究人体在运动状态下各器官系统形态结 构与功能活动变化规律及其影响的一门学科。是多门学科之间相互交叉与渗透的科学。 是研究人体活动科学的领域。是通过位置、速度、加速度等物理量描述和研究人体和器械的位置随时间变化的规律或在运动过程中所经过的轨迹,而不考虑人体和器械运动状态改变的原因。 2、人体重心:人体重心一般在身体正中面上第三骶椎上缘前方7cm处。由于性别、年龄、 体型不同,人体重心略有不同。一般男子中心比女子高,自然站立时,男子重心高度大约是身高的56%,女子大约是身高的55%,这是因为女子骨盆较大的原因。 3、人体解剖参考轴与面(14): 轴:冠状横轴,垂直纵轴,矢状轴 面:水平面,与地面平行,把人体分成上下两部分 冠状面,把人体分成前后两部分 矢状面,把人体分成左右两部分 4、人体关节的运动形式(15): 屈曲与伸展,主要以横轴为中心,在矢状面上的运动 内收与外展,主要以矢状轴为中心,在冠状面上的运动 内旋与外旋,主要以纵轴为中心,在水平面上的运动 (前臂和小腿有旋前和旋后运动,足踝部还有内翻和外翻运动) 6、杠杆的分类(17):三类 第1类杠杆,又称平衡杠杆,支点位于力点和阻力点中间 第2类杠杆,又称省力杠杆,其阻力点在力点和支点的中间,可用较小的力来克服较大的阻力 第3类杠杆,又称速度杠杆,力点在阻力点和支点之间,如使用镊子 第二章骨骼肌肉系统运动学 *第一节骨运动学 1、骨运动学概念(22): 正常成年人人体共有206块骨 2、骨的功能(27):(疑问答题) 1)力学功能 a 支撑功能,骨是全身最坚硬的组织,对肢体起着支撑作用,并负荷身体自身的重 量及附加的重量,如脊柱、四肢 b 杠杆功能,运动系统的各种机械运动都是在神经系统的支配下,通过骨骼肌的收 缩、牵拉骨围绕关节产生的。骨在运动中发挥着杠杆功能和承重作用 c 保护功能,某些骨按一定的方式互相连接围成体腔或腔隙来保护内在组织和器 官,如颅腔保护脑 2)生理学功能 a 钙磷储存功能与物质代谢功能 b 造血功能和免疫功能 第二节*肌肉运动学
第二章正常人体运动学第一部 分 单项选择 题1、关于椎骨的描述不正确的时(E) A 由椎体、椎弓、突起三部分组成 B 椎体和椎弓围成椎间 孔C椎间孔内容纳脊髓 D 椎体和 椎弓发出 7 个突起E所有椎骨相连,椎孔形成椎管 2、上肢骨的体表标志不包括 ( B) A 肱骨内上髁和外上髁 B 喙突C 桡骨和尺骨茎 突 D 鹰嘴E 肩胛骨上角和下 角 3、关于肘关节描述正确的是 ( B) A 包括肱尺、肱桡、桡 尺远端3 个关节 B 3 个关节包在一个关节囊 内 C 关节囊的两侧最薄 弱 D 可沿矢状轴做屈 伸运动 E 伸肘时肱骨内外上髁与尺骨鹰嘴三点连成等腰三角形4、提肋的肌不包括( B) A 胸大肌 B 肋间内肌 C 肋间外肌 D 前斜角肌 E 中斜角肌 5、下列属于长骨的是 ( D) A 肋骨 B 胸骨 C 跟骨 D 趾骨 E 鼻骨6、胸骨角平对 ( C) A 第一肋软骨 B 第三肋软骨 C 第二肋软骨 D 第 四肋软骨E 第五肋软 骨 7、下列各项中协助围成椎管的韧带 是(C) A 棘上韧带 B 前纵韧带 C 黄韧带 D 棘间韧带 E 后纵韧带8、血中氧分压降低导致呼 吸加强的原因是直接兴奋 (C)A 延髓呼吸中 枢 B 呼吸调整中枢 C 外 周化学感应器 D 中枢化学感应器E 肺牵张感应 器 9、关于端脑内部结构的描述, 正 确的是( B)A 大脑半球表面有白质覆 盖 . B 大脑纵裂的底为连接两半球宽厚的骈 底体 C 基底神经核位于底丘脑 D 端脑内腔为第三脑室 E 以上都不是10、可兴奋细胞发生兴奋 时的共同表现是产生(D) A 收缩活动B 分泌活 动 C 静息电位 D 动作电位 E 局部电位 11、支配肱二头肌的是神经是(B) A 腋神经B 肌皮神 经 C 桡神经 D 尺神经 E 正中神 经 12、支配咀嚼肌的神经是 (C) A 面神经 B 上 颌神经C 下颌神 经 D 舌下神经 E 舌咽神经13、臀大肌可使髋关节(B) A 前屈 B 旋 外 C 旋 内 D 外展 E 内收14、既能跖屈又能 使足内翻的肌 是( B)A 胫骨前 肌 B 胫骨后肌 C 姆长屈肌 D 趾长 屈肌E腓骨长 肌15、以下哪项不是骨组织的组成成分(D) A 骨细胞 B 胶原纤维 C 水 D 弹性纤维E 黏蛋 白16、以下关节软骨的特性 不正确的是( C) A 减小关节面摩 擦 B 吸收机械震荡 C 有神经支 配 D 适量运动可增加关节软骨的厚度E 反复的损伤可增加软骨的分解代 谢17、 成人骨折后,骨的修复主要依靠 (D) A 骺软骨 B 骨密质 C 骨髓 D 骨膜 E 骨松质18、神经 ---肌肉接头传递中,清除乙酰胆碱的酶是 (D) A 磷酸二酯 酶BATP酶C腺苷酸环化酶 D 胆碱酯酶E脂肪酶 19、脊髓中央管前交叉纤维损伤将引起(B) A 断面以下同侧的浅感觉丧 失 B 断面以下对侧的浅感觉丧 失 C 断面以下对侧的深感觉丧失 D 断面以下双侧的浅感觉丧 失 E 断面以下双侧的深感觉丧失20、在骨骼肌终板膜上,Ach 通过下列何种通道实现其跨膜信号转 导( A) A 化学门控通 B 电压门控通道 C 机械
2019年《人体解剖学-下肢》考试题库 复习测试题 A1型题 1.下肢力线通过的三个点是 A.股骨头中点、髌骨中点和踝关节中心 B.股骨大转子、髌骨中点与踝关节中点 C.髂前上棘、胫骨粗隆与内踝尖 D.股骨头中点、髌骨中点与第一趾蹼的连线 E.股骨头中点、髌骨中点与中趾外侧 答案:A 2.出入梨状肌下孔的结构中,居最外侧的是 A.坐骨神经 B.股后皮神经 C.臀下血管 D.阴部内血管 E.阴部神经 答案:A 3.出梨状肌下孔入坐骨小孔的是 A.臀下血管及神经 B.闭孔血管及神经
C.臀下血管及阴部神经 D.阴部内血管及股后皮神经 E.阴部神经及阴部内血管 答案:E 4.关于大隐静脉的描述,哪项是正确的?A.全长与隐神经伴行 B.在内踝前方与隐神经伴行 C.经髌骨内缘上行 D.在股部与隐神经伴行 E.与小隐静脉间无交通支 答案:B 5.全身最长、静脉瓣最多的静脉 A.股静脉 B.大隐静脉 C.腘静脉 D.头静脉 E.胫后静脉 答案:B 6.关于隐静脉裂孔的描述,哪项是正确的?A.是阔筋膜的薄弱处 B.位于髂前上棘下方3~4cm处 C.其内侧缘明显锐利
D.有隐神经通过 E.以上都不对 答案:A 7.关于腹股沟浅淋巴结的描述,哪项是正确的?A.位于大隐静脉末端周围 B.分三组位于腹股沟韧带下方 C.下组位于腹股沟韧带下方 D.下组沿大隐静脉末端周围排列 E.上组沿腹壁浅静脉排列 答案:D 8.肌腔隙与血管腔隙位于 A.腹股沟韧带与耻骨梳之间 B.腹股沟韧带与髂、耻骨之间 C.腹股沟韧带与髂骨之间 D.髂耻弓与腔隙韧带之间 E.以上都不是 答案:B 9.通过肌腔隙的结构是 A.股动脉与股静脉 B.隐神经与大隐静脉 C.股神经与髂腰肌 D.股鞘与股管
人体下肢外骨骼机器人的步态研究现状 王楠,王建华,周民伟 外骨骼(exoskeleton )一词来源于生物学,是指为生物提供保护和支持的坚硬的外部结构[1],如甲壳类和昆虫等节肢动物的外骨骼系统。人体外 骨骼机器人是将人的智慧与机器的机械动力装置结合为一体的机器人[2]。美国于2000年开展了“增强人体机能的外骨骼”(Exoskeletons for Human Performance Augmentation ,EHPA )研究项目[3-4],自此,外骨骼机器人的开发与应用逐渐进入 人们的视线,成为关注的焦点。由于外骨骼机器人不仅为操作者提供了诸如保护、身体支撑等功能,还能在操作者的控制下完成一定的功能和任务,因此在下肢功能障碍患者的步行功能锻炼过程中的应用逐渐增多[5-7];此外,其在单兵作战装备 【摘要】外骨骼机器人是将人的智慧与机器的机械动力装置相结合的一种机器人,不仅可以为操作者提供保护、身体支撑等功能,还可以在操作者的控制下完成一定的功能和任务,应用前景巨大。文中阐述人体下肢外骨骼机器人下肢外骨骼实现行走应具备的关节及其活动度,介绍下肢外骨骼机器人步态控制的基础——正常步态分析,详细论述了目前控制下肢外骨骼机器人行走及步态稳定性的主要方法。 【关键词】下肢;机器人;外骨骼;步态 中图分类号:R-05,R336文献标识码:A 文章编号:1674-666X(2012)01-0062-06 Current researches of gait analysis on human lower extremity exoskeleton robotic device WANG Nan,WANG Jianhua,ZHOU Minwei.Department of Overseas Chinese,Guangzhou General Hospital of Guangzhou Military Command,Guangdong 510010,China 【Abstract 】Exoskeleton robotic device is a kind of robot that combines the intelligence of human with the mechanical power of machine,which can not only provide protection and support for operators but also accomplish certain functions and missions under the control of operators.In this paper,relative key factors of lower extremity exoskeleton robotic device techniques are introduced briefly such as the joints and the range of motion (ROM)which the lower extremity exoskeleton should be equipped,the normal gait analysis which is the basis of gait control of the exoskeleton robot,and then the major walking control methods and gait stability control methods for lower extremity exoskeleton robotic device which are discussed in detail. 【Key words 】Extremities;Robotics;Exoskeleton;Gait DOI :10.3969/j.issn.1674-666X.2012.01.010 基金项目:广东省科技计划项目(2010B010800006),广州市科技计划项目(2010J-E311) 作者单位:510010广州军区广州总医院华侨科(王楠);脊柱外科(王建华);医务部(周民伟)E-mail :115989930@https://www.doczj.com/doc/e615210217.html, 综述
第二章正常人体运动学 第一部分 单项选择题 1、关于椎骨得描述不正确得时(E) A由椎体、椎弓、突起三部分组成 B椎体与椎弓围成椎间孔 C椎间孔内容纳脊髓 D椎体与椎弓发出7个突起 E所有椎骨相连,椎孔形成椎管 2、上肢骨得体表标志不包括(B) A肱骨内上髁与外上髁 B喙突 C桡骨与尺骨茎突 D鹰嘴 E肩胛骨上角与下角 3、关于肘关节描述正确得就是(B) A包括肱尺、肱桡、桡尺远端3个关节 B 3个关节包在一个关节囊内 C关节囊得两侧最薄弱 D可沿矢状轴做屈伸运动 E伸肘时肱骨内外上髁与尺骨鹰嘴三点连成等腰三角形 4、提肋得肌不包括(B) A胸大肌B肋间内肌C肋间外肌D前斜角肌E中斜角肌 5、下列属于长骨得就是(D) A 肋骨 B 胸骨 C 跟骨 D 趾骨 E 鼻骨 6、胸骨角平对(C) A第一肋软骨 B 第三肋软骨 C 第二肋软骨 D 第四肋软骨E第五肋软骨 7、下列各项中协助围成椎管得韧带就是(C) A 棘上韧带 B 前纵韧带 C 黄韧带 D 棘间韧带 E 后纵韧带 8、血中氧分压降低导致呼吸加强得原因就是直接兴奋(C) A延髓呼吸中枢B呼吸调整中枢C外周化学感应器 D中枢化学感应器E肺牵张感应器 9、关于端脑内部结构得描述,正确得就是(B) A大脑半球表面有白质覆盖、 B大脑纵裂得底为连接两半球宽厚得骈底体 C基底神经核位于底丘脑 D端脑内腔为第三脑室 E以上都不就是 10、可兴奋细胞发生兴奋时得共同表现就是产生(D) A收缩活动B分泌活动C静息电位D动作电位 E 局部电位
11、支配肱二头肌得就是神经就是(B) A腋神经B肌皮神经C桡神经D尺神经E正中神经12、支配咀嚼肌得神经就是(C) A面神经B上颌神经C下颌神经D舌下神经E舌咽神经13、臀大肌可使髋关节(B) A前屈B旋外C旋内 D 外展 E 内收 14、既能跖屈又能使足内翻得肌就是(B) A胫骨前肌B胫骨后肌C姆长屈肌D趾长屈肌E腓骨长肌 15、以下哪项不就是骨组织得组成成分(D) A骨细胞B胶原纤维 C 水D弹性纤维E黏蛋白16、以下关节软骨得特性不正确得就是(C) A减小关节面摩擦B吸收机械震荡 C 有神经支配 D适量运动可增加关节软骨得厚度E反复得损伤可增加软骨得分解代谢 17、成人骨折后,骨得修复主要依靠(D) A骺软骨B骨密质C骨髓D骨膜E骨松质18、神经---肌肉接头传递中,清除乙酰胆碱得酶就是(D) A磷酸二酯酶BA TP酶C腺苷酸环化酶 D 胆碱酯酶E脂肪酶 19、脊髓中央管前交叉纤维损伤将引起(B) A断面以下同侧得浅感觉丧失B断面以下对侧得浅感觉丧失 C断面以下对侧得深感觉丧失D断面以下双侧得浅感觉丧失 E断面以下双侧得深感觉丧失 20、在骨骼肌终板膜上,Ach通过下列何种通道实现其跨膜信号转导(A) A化学门控通道B电压门控通道C机械门控通道 DM型Ach受体 E G蛋白耦联受体 21、双向轴浆运输主要运输(A) A具有膜得细胞器B递质合成酶 C 微丝与微管 D神经营养因子E细胞代谢产物 22、关于神经纤维轴浆运输得描述,正确得就是(D) A轴突得轴浆并非经常在流动 B 顺向与逆向轴浆运输得速度相等 C狂犬病病毒可经顺向轴浆运输而扩散D与神经得功能性与营养性作用有关 E与维持神经结构与功能得完整性无关 23、关于突触传递特点得描述,错误得就是(D) A单向传布B有时间延搁C可以发生总与D不需要钙离子参与E易疲劳 24、反射活动得一般特性不包括(B) A单向传递B对等原则C兴奋节律得改变D后发放 E反射得习惯化与敏感化 25、关于脊椎得生理弯曲,正确得就是(D) A颈曲后凸,胸曲前凸 B 骶曲前凸,腰曲前凸 C颈曲前凸,胸曲前凸D颈曲前凸,胸曲后凸 E胸曲前凸,腰曲后凸 26、胸长神经支配(C)
下肢外骨骼康复机器人设计及运动学分析 发表时间:2017-03-16T14:57:02.420Z 来源:《科技中国》2017年1期作者:王子鸣[导读] 本文对该机构进行了运动学分析,并使用MATLAB对机构进行了轨迹规划仿真。 (宜昌市葛洲坝中学湖北宜昌 443002) 摘要:下肢运动功能障碍患者为数众多,常规的康复训练高度依赖理疗师,成本昂贵,常人难以承受。下肢外骨骼康复机器人能有效解决这一社会问题。本文设计了一个单腿两自由度主动驱动的下肢外骨骼康复机器人。采用两个直线驱动器分别驱动髋关节和膝关节的运动,直线驱动器末端安装有力传感器,通过时时检测人-机作用力实现机器人的柔顺控制。本文对该机构进行了运动学分析,并使用MATLAB对机构进行了轨迹规划仿真。仿真结果表明该下肢外骨骼康复机器人具备辅助病人的能力。关键词:下肢外骨骼,柔顺控制,轨迹规划 0 引言 随着人口老龄化的发展,脑卒中,骨关节炎等老龄化疾病患者数量逐渐增加。这类患者往往患有各种致残的疾病,丧失正常的运动能力[1]。在这样的时代背景下,未来社会对康复医疗的需求将越来越迫切。下肢外骨骼机器人将为解决这一社会问题发挥重要的作用。 近年来,国内外众多研究机构对康复机器人开展了深入的研究。在台架式下肢外骨骼康复机器人研究方面,瑞士HOCOMA公司和瑞士苏黎世联邦理工大学共同研制的Lokomat外骨骼康复机器人,它髋关节和膝关节各采用一个直线电机进行驱动,单腿具有两个自由度,双腿四个自由度。该机器人在轨迹控制的基础上采用了阻抗控制的方式,具有很好的实用性和用户体验[2-4]。哥伦比亚大学研发的ALEX,除了单腿的四个自由度之外,骨盆上还具有四个自由度,机器人总共具有十二个自由度,它将电机放在下肢外骨骼后方,采用带轮等实现电机远端驱动,有效地降低了机器人运动部件的惯量,该机器人采取将切向力和法向力作用在患者的踝关节的方式,切向力帮助患者按照轨迹移动,法向力用于调整踝关节轨迹的法向运动阻碍[5]。荷兰屯特大学研发的LOPES,该机器人采用绳驱动的方式,单腿有四个自由度,除了髋关节和膝关节在矢状面上的各一个旋转自由度外,还增加了骨盆的移动和髋关节的内收外展运动。该机器人同时具有两种不同的控制模式,分别为机器人主动和患者主动,充分考虑到了不同人的行走能力,能根据患者的实际需要提供必要的辅助[6]. 瑞士洛桑理工大学研制的WalkTrainer,它髋关节,膝关节,踝关节各一个自由度,单腿具有3个自由度,同时骨盆具有6个自由度,机器人总共有12个自由度。该机器人采用了肌肉电刺激的物理疗法,同时通过腿部外骨骼上的力传感器,实现了人-机的闭环控制[7]。国内上海璟和研制的Flexbot机器人实现了多体位的康复训练,病情严重的病人在康复训练初期可以躺着进行康复训练,待恢复得较好时,可以选择站立式训练[8]。 此外,在独立式下肢康复外骨骼方面,以色列的Rewalk[9], 美国的EKSO[10],日本的HAL[11]等都是下肢康复机器人中的杰出代表。国内的电子科技大学研制的外骨骼机器人[12],北航研制的“大艾’外骨骼机器人[13]也取得了可喜的成绩。 与传统的工业机器人相比,康复机器人的一个突出特点是与人的交互十分频繁。安全性,舒适性,以及适应各种不同的工作环境是康复机器人需要考虑的重要问题。相反,工业机器人所需的高精度,高速度等特性在这里要求并不高。因此,设计出具有柔顺性的下肢外骨骼康复机器人具有重要的意义。 本文将就设计出一套下肢外骨骼康复机器人展开论述。首先,将根据人体下肢结构进行机器人的机械机构设计,接着进行机构的运动学分析,并使用MATLAB软件对该机构进行仿真。仿真结果表明该机器人具有协助病人进行康复运动训练的能力。 1 机构模型 1.1机构模型设计 人体结构模型是设计下肢外骨骼康复机器人基础。因此,我们先对人体下肢进行分析。人体下肢主要有三个关节,分别是髋关节,膝关节,踝关节。髋关节主要有髋臼和股骨组成,在运动时,股骨绕着髋臼运动,是一个球窝关节。膝关节连接了股骨和胫骨,踝关节主要由胫骨和腓骨下端的关节面与距骨滑车构成[14]。人体行走过程中,矢状面上的运动占主导地位。为了机构的简化,我们仅考虑下肢在矢状面上的运动,并把髋、膝、踝关节都简化为铰链关节。 该下肢外骨骼康复机器人为台架式下肢外骨骼机器人,上方的支架与台架相连接。髋关节与膝关节之间的连杆与大腿绑定,膝关节与踝关节之间的连杆与小腿绑定。直线驱动器由直流电机,同步带,滚珠丝杠,以及末端的力传感器组成。同步带,滚珠丝杠等机构把直流电机的转动转化为直线运动。力传感器能够实时检测到直线驱动器的推力,当推力过大时,直线驱动器减慢速度或者停止运动甚至向反方向运动,力传感器的加入增加了康复机器人的柔顺性,避免了机器人对人的伤害。该机构中髋关节和膝关节由两个直线电机主动驱动,踝关节为被动运动。为了能够适应不同人的腿长,设计了长度调节机构。该调节机构为在调节机构上下部之间都加工出一系列出通孔,上下两部分通过螺栓连接。通过调节机构下部分与上部分在不同位置连接,可以改变机构的长度。 1.2机构参数 人体正常步行过程中,髋关节最大屈曲约30°,最大伸展约20°,膝关节最大屈曲约为65°、最大伸展为0°。踝关节最大背屈约为30°,最大跖屈约为50°[14].我们设计的该机构的适应人体身高为150mm-190mm.根据这个数据,经过运动学解算,我们选择直线驱动器的工作行程范围如表1所示。