全自动颗粒包装机的设计
摘要
本文主要介绍了一种包装机械—自动颗粒包装机的工作原理及其设计过程,对其传动系统的参数进行计算和传动部件的强度校核,对其整体外观、箱体以及支架进行合理的改进。自动颗粒包装机主要适合于包装食品、茶叶、医药、化工等产品的松散状、无粘性细小颗粒物品的小剂量自动包装。其包装材料为复合材料,在高温下粘合。
本机主要有横封机构、纵封机构、供料机构、剪切机构、传动机构及电器控制系统。在本次设计中,我们的主要任务是对其传动系统的支架、整机的箱体进行改进,使其满足设计要求,以达到所要求的生产效率。
本机的特点是能自动完成制袋,可调量杯计算、充填、打印日期、封合部位打口、记数等功能。本机还采用了无机调整制袋长度机构和智能型商标定位装置。
关键词:工作原理,传动机构,支架
Automatic Granular Packaging Machine
ABSTRACT
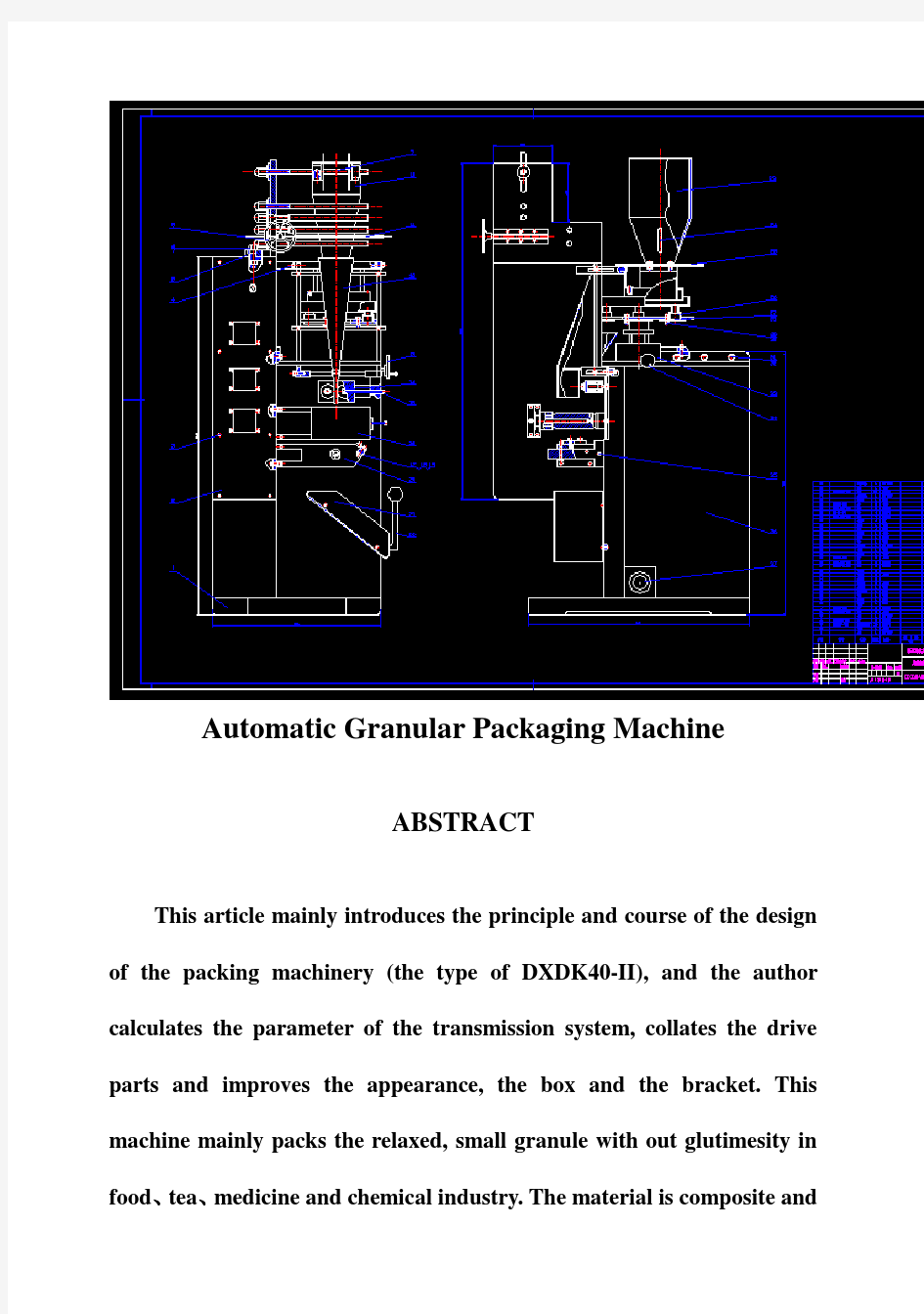
This article mainly introduces the principle and course of the design of the packing machinery (the type of DXDK40-II), and the author calculates the parameter of the transmission system, collates the drive parts and improves the appearance, the box and the bracket. This machine mainly packs the relaxed, small granule with out glutimesity in
food、tea、medicine and chemical industry. The material is composite and
agglutinated in system and the electricity control system. The main task in this work is to improve the bracket in the transmission system and the box of the machine to meet the needs of the design and reach the efficiency we need.
It can make bags、adjust the measure of the measuring cup、filling、mimeograph the date、make the space in the enveloped parts and count automatically. It also can adjust the length of the bags and orient the position of the mark.
KEY WORDS: the principle of the work,transmission parts,the bracket
目录
摘要 ······································································································ABSTRACT·······························································································
1 前言 ······································································································
2 自动颗粒包装机工作原理···········································································
2.1 机械部分························································································
2.1.1 无级调速机构 ·········································································
2.1.2 间隔齿轮及锥棍无级调整机构····················································
2.1.3 偏心链轮机构 ·········································································
2.1.4 行星差动轮系 ·········································································
2.1.5 可调量杯机构及量杯零件图 ·······················································
2.2 电器部分························································································
2.3 光电控制的简要说明 ········································································
3 总体方案设计··························································································
3.1 功能和应用范围 (1)
3.2 工艺分析 (1)
3.3 机构造型 (1)
4 运动参数的计算及传动系统的设计 (1)
4.1 带传动的计算 (1)
4.2 链传动设计 (1)
4.3 剪切部分齿轮传动系统 (1)
4.4 锥齿轮的设计计算 (2)
4.5 料盘传动部分 (2)
4.5.1 I-II 间的传动 (2)
4.5.2 II-III 之间的传动·········································错误!未定义书签。
4.6 隔板的设计、加工以及误差 ······································错误!未定义书签。
4.7 支架的设计及加工 ··················································错误!未定义书签。
5 机构调整及事故处理方法 (3)
5.1 机构本身故障 (3)
5.2 转盘部位故障 (3)
5.3 注意事项 (3)
致谢 (3)
参考文献 (3)
1 前言
近半个多世纪以来,随着生产与流通日益社会化、现代化,产品包装正以崭新的面貌崛起,受到人们的普遍重视。
现代包装的普遍含义是:对不同批量的产品,选用某种有保护性、装饰性的包装材料或包装容器,并借助适当的技术手段实施包装作业,以达到规定的数量和质量,同时设法改善外部结构,降低包装成本,从而在流通直至消费的整个过程中使之容易储存搬运,防止产品破坏变质,不污染环境,便于识别应用和回收废料,有吸引力,广开销路,不断促进扩大再生产。
中国有着悠久的包装历史。可是中国的现代化包装工业起步比较迟缓,解放前只有几个大城市的啤酒厂、汽水厂、罐头厂、卷烟厂才培植一些包装机械。直到五十年代末期,开始引进仿制,形成小规模的生产能力。自动颗粒包装机实现了对一些无粘性颗粒的包装,本机采用的材料为复合材料,包装材料以纸玻璃纸涤纶膜铝箔等为基纸引为商标,并喷涂要均匀,复卷后外圆平整,不允许有高低不平或两边松紧不一致的现象。
自动颗粒包装机由于功能较少应用范围小,但生产率较高,本次设计的主要对象是包装机的动力系统,介绍了包装机的横封机构、纵封机构和供料机构以及箱体和支架设计,并简单介绍了它的电气控制部分。
其机械部分主要有无级调速机构、偏心链轮机构、行星差动轮系和可调量杯机构。电气部分主要有光电开关、凸轮接近开关控制机构和减速电机。
在包装机械电气自动化中,光电技术越来越起着重要作用。例如,可用来自动检测流水线上包装容器的形状、口径伤痕污垢缺盖,以及箱体的外廓尺寸、排列间距、移动速度、装入个数、封条有无等;还可用像混合物料按色泽逐个自动分选,斗槽内料或液位的自动控制,大型物件多道捆扎的自动定位,卷筒商标纸的自动对位切割,冲料软管的自动定向封口,以及其他类似的情况。毕业设计是工科大学毕业生面临毕业时,一次综合全,面的设计能力的训练。目前在于培养理论联系实际的设计思想,训练综合运用机械设计和有关课程的理论能力,加强和扩展有关机械设计方面的知识。
通过我们的努力,在经过了毕业实习参观、制定设计方案、选择传动机构、计算零件尺寸及全,面考虑制造工艺、使用及维护要求,在吴春英的指导下,我们完成了这一机器的设计。但难免有不足之处存在,希望各位老师加以指导。
2 自动颗粒包装机工作原理
2.1 机械部分
(1)包装过程示意图:
包装材料(薄膜)——经薄膜成型器成型——进行横封热合打字打撕口装料——切断——进行纵封热合成型
(2)几个主要部件的简要说明
2.1.1 无级调速机构
该机构是用来调整机器包装速度的,其机构简图如图2-1所示:
图2-1 无极调速机构
调整速度时首先松开螺母2;当顺时针旋转手柄1时,动轮3外移,主动轮以便动轮4在弹簧5作用下,使它压紧三角带,从而使三角带向皮带轮外缘移动,实现了增速运动。当翻转手柄1时,动轮3压紧三角带,迫使三角带克服弹簧5的压力,向主动皮带轮小直径方向移动,实
现了减速运动。
2.1.2 间隔齿轮及锥棍无级调整机构
间隔齿轮的作用是为改变包装袋长而设置,从传动系统原理图来看它的运动关系是主轴每旋转一转,纵封棍送进薄膜纸前进一个袋长,二横封旋转半周封合一次,因此当改变包装袋长度尺寸时,必须与其相适应的齿轮合,它的特点是:间隔齿轮的齿数,即相当于袋长的尺寸。锥棍无级调速机构与间隔齿轮配合使用,其作用在于调整已定袋长的幅度,这对提高光点跟踪的准确性起到了可靠的保障,调整幅度见表2-1。
表2-1 调整幅度表
2.1.3 偏心链轮机构
如图2-2所示,该机器的纵封的作用有两个:一是进行纵向封合作用,另一是带动包装纸进行送纸,而横封棍的封合是间隔的,按正常的工作要求是在横封进行封合这段时间内,它的线速度应与纵封棍的线速度保证一致,否则会使包装材料受到拉伸而破损或是松弛起皱,以至造成封
合不良,为此,本机设置偏心链轮机构,以保证袋长在一定范围内变化时能使横封棍封合时的圆周线速度与纵封棍的圆周线速度相适应,以保证机器的正常工作。
当包装尺寸改变除了更换相适应的间隔齿轮及调整锥棍外,同时还应对偏心轮进行适当的调整,首先将偏心链轮左边的琐母松开,旋转偏心链轮调节旋钮,使其标签少年宫的数值(即改变后的袋长)对准轴上的刻线,然后将琐母琐紧,即调整完毕。
当所选的袋长处于偏心链轮中心位置尺寸时,(此时袋长为80mm这时偏心链轮中心与主轴中心重合,同时横封棍的圆周线速度与纵封棍的圆周线速度是一致
图2-2 偏心链轮机构
链轮中心与主轴的中心不重合有一定的偏心距,这时由于主轴的转速是等速的,而主轴的中心和偏心链轮有一定的偏心距,这样使同样半圈时间内偏心链轮左右半圈转过的齿数不同,则使齿数多的半圈线速度就大;齿数少的半圈线速度就低,偏心链左右半圈转过的齿数不同则使齿数多的平圈线速度就大;齿数少的半圈线速度就低,偏心链轮呈现为不等速运动。因此,改变包装袋袋长尺寸后,相应地调整偏心链轮地连心量,即可以实现横封棍与纵封棍2着的线速度相适应。
2.1.4 行星差动轮系
当在本机器上使用独立商标之保障材料进行工作时,按照成品袋的要求,横封封口的位置正好处于两个商标的中央,可是在工作过程中,由于纵封棍送进的拉伸,加热温度的影响,包装纸的存放条件和时间等等因素的影响,包装纸在使用时,不能保证横封封合位置处于两个商标的中间,为了补救位置的偏差,必须对纵封棍进行速度的修整,以达到此目的,而行星差动轮系即是这种修整过程中的执行机构。当封合位置正确时,由于减速电机驱动的蜗杆Z不动则Z10、Z100不动,主轴的运动通过中间轮组传到同轴时的Z250传给星轮,行轮一方面自传,另一方面带动系杆齿轮Z30绕Z100作公转运动,经系杆齿轮转致纵封主动轴进行反转运动,通过Z100、Z120使星轮转速降低后加快,这样两个
运动合成输出的速度就减慢或加快,以达到修整的目的。
图2-3 行星差动轮系
2.1.5 可调量杯机构及量杯零件图
量杯分为内科杯合外科杯,外科杯外形尺寸与下料盘结合。量杯规格分为三种,计量范围(按容积),第一种:5-10mL,第二种:10-20mL 第三种:20-40mL,根据用户产品(即被包装物)计量的大小,可进行上下调节,一般掌握原则是根据用户产品比重来调整量杯的高度,实际
调整后的剂量应略小于剂量,其实值以调整转盘中的刮料器与转盘内表明之间距离来补偿,但它们之间的距离不应该过大(即补偿量)过大后会造成剂量不精确;奸细过小会引起刮料器与转盘相互磨损。
2.2 电器部分
本机能源采用JY7134电容启动单相电机,功率70W,电压220V,转速1400rmin,外线电源由于机器电源插座引进,转动电源开关电源指示灯亮,拨动电机开关启动电机,电机指示灯亮,电机接入事通过电机保险丝。
热封系统是采用电阻丝加热连续封合,纵封棍采用两个环形加热器,每个250W,100W;横封是两个棒形加热器,每个250W,100W安装在横封棍内,纵封棍内,纵封加热器是锁紧螺母固定在基板上,均可以直接与电源相接。
加热的温度是预先调到的给定的温度,由两台DET-4301位式温度调节仪分别对纵封及横封进行自动温度控制,即使控制他们各自的继电器,从而使他们的加热器通电或断电。温度调节仪的信号分别来自他们的热敏电阻,将温度的变化转化成电信号的变化进行自动控制。
2.3 光电控制的简要说明
在自动包装中必须保持商标位置正确,这是对包装质量的基础要求,
为此必须使纵封,横封棍速度与包装商标间隔长度一致,然而包装纸商标实际速度由可能与预计的有误差,此误差积累起来就会使商标位置改变,以致超出允许差,造成废电器部分。
(1)凸轮接近开关控制结构
单一的光电控制,只能使伺服电机作一种动作,而包装机却需要作如下三种动作:
a) 纵封速度不需要修正,在光电信号下,伺服电机不动。
b) 纵封棍速度偏低,商标后移,要在光电信号下,纵封棍增速,以实现同步。
c) 纵封棍速度偏高,商标前移。要求在光电信号下,伺服电机反转,纵封棍减速。
在本机主轴上装与由凸轮积极、接近开关以实现三种动作,本系统采用电感式NPN输出,常开型接近开关精确调节接近开关与凸轮接近距离,再者凸轮接近开关的全过程中,接近开关指示灯应保持常亮,不能是闪动,接近开关与凸轮间距应为2~3mm。
(2)减速电机采用YJ25E-9可逆电机作为执行机构,为防止主电机停转时,减速电机被开动,而超负荷,所以与主电机采用同移拨动开关,减速电机才能接通电源。
3 总体方案设计
3.1 功能和应用范围
(1)用途:包装无粘性小颗粒包装袋规格,长55-100毫米,宽30-80毫米。包装速度为50-100袋分。
(2)包装材料:主要为复合材料,在高温下粘和,一纸玻璃纸涤纶膜铝箔等为基纸为商标并喷涂高压聚乙烯制成,喷涂均匀。
(3)封合方式:热封
3.2 工艺分析
(1)确定机器类型
a)工位:由于生产批量较大,故选用多工位自动包装机。
b)根据自动机械设计理论,找到多个动作的同步点,采用连续型运动形式。
(2)确定工艺路线
a)包装机的工艺路线:主要有直线型、阶梯型、圆弧型、组合型等,其中直线型又分为立式和卧式两种,本机采用立式直线型工艺要求路线。
b)包装材料供送:包装材料的供送利用纵封棍的摩擦来完成,这样使机器的结构简单紧凑容易实现自动化。同时提高了生产率,使包装材料供送与封口一次完成。
c)供料机构:供料机构的计量方式采用容积法计量,散体供送装置,依其主题运动的方式分为旋转式、摆动式、直线往复式和振动式等多种;
依其传动方式分为机械式、液压式、气动式和电磁式等多种。本机运动方式采用旋转式,其传动采用机械式。
d)主传送:主传送系统主要采用齿轮运动,使其达到生产要求,此外还有由减速电机带动的蜗轮蜗杆减速机构。
e)横封、纵封机构:本机的纵封器采用连续型棍式纵封器,它的热封机构是做等速相向回转的一对棍筒,它对袋筒兼有施压、牵引及加热封边的作用。在热封期间,热量有滚筒内的电热丝通电后供给常热式辐射加热,使热融型塑料进入两滚筒的热合接触面,相互粘合而形成密合的纵封。其横封采用一种联系横封器结构。热封所需的压力可借助两侧的压缩弹簧加以适当调节。热封时,热封头与连续运动着的袋筒必须既有同步的线速度,否则,封口部位可能发生起皱或拉长,甚至段裂等不良现
f)剪切机构:本剪切机构采用棍刀式。切断装置。实际上切割过程具有双重作用,即刃口对塑料薄膜挤压、滚切和撕裂,因此要求滚到速度达预料袋下降速度。
3.3 机构造型
(1)包装材料供送机构
为时操作方便,将卷筒纸架设置在机器上方。利用象鼻成型器折弯成型式充填封口机,平张卷筒薄膜经导棍引至象鼻成型器(图3-1)被折
弯成圆筒状,然后借等速回转的纵封棍加压热合并连续向下牵引。物料经计量装置计量后,由加料斗落入已封底的袋筒内。经不等速回转的横封棍,将该袋筒的上口缝合,再经回转切刀切断后排除机外。
(2)主传动系统
卷筒式复合包装材料经象比成型器折叠后,即由热封装置先后完成分段宗封和底边全封。
(3)传动系统
要求自动颗粒包装机的生产效率达到50-100袋分,袋长55-110毫米。因此,设置了间隔齿轮和锥滚无级调速机构,采用两极降速机构,第一节用宽三角带无级变速,第二节用锥滚无级变速。
(4)切断装置
机械式切断包装袋的方法大体上有热切和冷切两种。可根据具体条件,如包装材料的材质、厚度、材袋的牵引运动形式、切割方法和切口形状等来适当选择。
热切是将薄膜局部加热融化并用热切元件向融化部分施加一定压力而使其分离的一种方法。热切元件多采用电加热刀或电加热丝,常与横封装置组合在一起,使热封与切割同时完成。其中高频加热刀既是一只具有刀口的电极,使用间歇式带装机热切聚氯乙烯薄膜材料。脉冲加热
电热丝,既是一跟直径为2mm的圆云电热丝,根据需要可选用间歇或连续通电进行分割,因其表面不能覆盖聚氯乙烯编制物,故分割用圆丝与封口用扁丝往往不安装在同一热封体上。冷切是借助锋利的金属刀刃使薄膜在横截面上受剪切力而分离料袋的一种方法。冷切工具常用滚刀、镰刀、锯齿刀等。由于机器是连续工作的,所以采用滚刀式,它有两种组合方式,1)滚刀与定刀、2)慢转滚刀与快转滚刀。前者多用于低速有少切削的场合,因此本机采用第一种组合方式。
(5)确定电动机功率
参阅同类包装机,确定电动机功率为0.37KW
4 运动参数的计算及传动系统的设计
4.1 带传动的计算
取带轮的传动比i=1.57,小带论直径,小带轮转速=1400rmin ;
(1)确定计算功率
查表得工作情况系数:
所以计算功率:
1.05370388.5ca A ed P K P w ==?=
(2)选取V 带带型
根据和的值查图确定带型为:Z 型普通V 带
(3)验算带的速度
11
171400 5.2 5.5601000601000d n m m m v s s s ππ??===
(4)确定V 带的基准长度和传动中心距
根据: 120120.7()2()d d a d d +<<+,
初步确定中心距,
计算所需要的带的基准长度:
自动包装机毕业论文题目:小型全自动包装机控制系统设计 专业:机电一体化工程
目录 摘要 ABSTRACT 前言 第1章DXD系列包装机控制系统设计说明 (6) 1.1本设计所用包装机的特点 (6) 1.2技术参数及设计要求 (7) 第2章DXD系列包装机的组成结构 (8) 2.1供纸模块 (8) 2.2横封纵封模块 (8) 2.2.1 包装封口强度的检测意义 (9) 2.2.2热封器的基本组成 (9) 2.3光电定长 (11) 第3章包装机电气控制系统硬件设计 (12) 3.1 步进电机的选用 (12) 3.1.1 步进电机概述 (12) 3.1.2 步进电机结构选择 (13) 3.1.3步进电机工作原理及工作方式 (15) 3.1.4步进电机的特性 (17) 3.1.5步进电机参数的选择 (19) 3.2步进电动机驱动器的选用 (24) 3.2.1步进电动机驱动电源 (25) 3.3可编程控制器(PLC)选用 (26) 3.3.1可编程控制器概述 (26) 3.3.2 PLC选型 (29) 3.4包装机电气接线图及电气原器件表 (30) 第4章包装机电气控制系统软件设计 (30) 4.1包装机的动作过程 (30) 4.2 PLC控制步进电机系统原理 (31) 4.3电气控制系统梯形图及时序图 (32) 4.4包装机的调试运行 (35) 结论 (39) 致谢 (40)
参考文献 (41) 摘要 本设计的主要目的是为了满足控制精度的医用制袋充填封口包装设备的电气控制系统。所包含的内容有:DXD系列包装机的发展概况;包装机九大组成部件中的供膜、热封、光电定长的介绍;本课题所用的电气控制元件的选择;实现设计目的的软硬件设计方法等;其中可编程控制器(PLC)、拉袋步进电机、光电开关、热电偶、温控仪的选择、软硬件的设计方法是本文的主要内容。展望现阶段包装机的发展状况,可以预知包装机在不久的将来会被广泛地应用于食品、医学、建材工业等领域,从而成为现代化产业中所必须的设备之一。 关键词:可编程控制器(PLC),步进电动机,热电偶,温控仪
食品定量称重包装解决方案—精威组合秤称重立式包装机系统 组合秤由于其称重速度快、称重精度高、自动化程度高等特点,广泛应用于颗粒食品、五金塑胶、医药等行业。 由于近年来物料、人工成本的不段攀升,企业利润不断被压缩,不少厂家纷纷寻找节省物料、节省省人工、提高效率的设备,以提高生产效率节省成本。精威组合秤称重立式包装机系统拥有这些你想要的性能是您理想的选择。 精威组合秤立式包装机系统与人工称重包装相比较的优势: 以某厂采用精威组合称重包装系统后生产效率的提升,成本节省为例:
精威的称重包装系统不但从您的经济效率考虑,而且从产品性能,质量、运行稳定性,运行精度等多方面综合的考虑系统配置,为您打造经济、稳定精度、耐用的完美解决方案。 精威立式称重包装机系统功能参数: 一、系统组成 1.Z型提升机+振动给料机:用于物料振动给料和物料提升; 2.10头组合秤:用于物料的定量称重,根据客户需求调整精度与目标重量; 3.工作平台:放置固定组合秤的平台; 4.立式包装机:可以自动打印日期,封合,切袋; 5.成品输送机:把包装好的产品输送到后设备配套设备如金属检测机、重量选别秤等。 二、系统特点 1、包装机便宜、经济性好,性价比高、包装机种类齐全,辅助设备齐全、适应物料范围广、场地占用小等,对于各类膜厚(0.03-0.15)的复合膜、单层PE膜、纸膜的包装均可应用。 2、全自动完成送料、计量、打印日期、充填制袋、封合、输送出料的全部过程。 3、计量精度高、效率高。 4、适用范围广,物料适应强。 三、应用范围 适合糖果、瓜子、果冻、冷冻、开心果、花生、果仁、杏仁、葡萄干等休闲食品;宠物食品;膨化食品;五金件、塑料胶料等各种颗粒状、片状、条状、圆状及不规则形状等物料的定量称重与包装 食品立式称重包装系统
1 绪论 1.1 课题研究的背景和意义 目前, 国内糖果产品的包装形式有扭结式包装、枕式包装、折益信封式包装。枕式包装在国际上流行于上个世纪60—70年代, 国内从80年代开始流行至今。传统扭结式包装是最老的包装形式, 从发明到现在已有近百年历史。这种包装形式多用于糖果, 它不仅可以通过现代化高速、自动化的包装机来完成, 也可以通过手工操作完成。最初的扭结包装机结构简单,功能单一,操作复杂,只能完成最基本的扭结动作,而且生产效率低下又极不卫生。因此曾一度被枕式包装机的出现所取代。多年以来, 糖果包装一直是以枕式包装独占鳌头,风靡一时。直到现在枕式包装机也较扭结包装机普及,。目前大多数糖果、巧克力生产企业均采用枕式包装。但随着糖果包装行业的迅猛发展,以及各种先进技术的应用,糖果扭结包装这种古老而有年轻的包装形式越来越受到人们的青睐。糖果扭结包装机的结构和功能不断完善, 使这种受人们欢迎的包装形式沉寂了一段时期后又走上了舞台[1、2]。 目前大部分扭结裹包产品,如糖果、冰棒、雪糕、巧克力等食品包装都已实现了机械化。但糖果扭结包装机的设计上存在一些问题,其缺陷是限制生产发展的瓶颈。例如:由于包装速度过快,糖块会严重偏移,使糖块超前运动,碰着运动零部件;理糖装置与出糖装置不协调、不同步,从而容易出现卡包漏包现象;包装材料制动力太小,拉伸时容易出现松弛,包装材料因飘动而跑偏;糖果通道间隙大,包装材料难以紧贴糖果。所以此次课题对这方面的研究对于优化糖果扭结包装机的结构、提高生产效率、降低生产成本以及减少机器故障等方面有着重要意义[3、4]。 1.2 扭结式糖果包装机研究现状 用挠性包装材料裹包产品,将末端伸出的裹包材料扭结封闭的机器称为扭结式裹包机。其裹包方式由单端和双端扭结。 我国糖果包装六七十年代前主要以手工作业为主,这是由我国当时的特殊国情决定的,对糖果扭结包装机的研究很少。随着市场需求的不断扩大和食品工业的快速发展,改革开放前我国开始从欧美等发达国家引进他们的糖果包装机械设备,并开始有计划的进行仿制和改造,吸收国外糖果包装机械的设计理念和制造经验。到八十年代初已经基
摘要 目前国产的设备大多是对国外进口产品的简单仿制,因此针对食品机械关键部件的深入研究,对原理、结构、运动、功能等分析,提供结构简单可靠、操作方便、机械化程度高、使用范围广的食品机械是很有必要的。 本文在分析食品机械的工艺和使用要求的基础上,通过对关键部件的理论分析,提出一种实用、简单、可靠和通用的传动系统,将结构等关键部件的设计原理、结构特点等做了较为详细的研究和设计;本文分析各机构的运动学规律,提出可行的优化结构满足切割工艺;对关键部件提出完整的设计方法,旨在满足市场需求,推动企业创新步伐。 关键词:食品机械,传动系统,结构设计,计算机辅助设计
Abstract As the demand for food diversification, personalization, automatic powder food machine applications more generally. Most of the current China-made equipment is to copy。Simple import of imitation products, the automatic food machine for powder-depth study of key components, the basic principles, structure, movement, functional analysis, to provide a simple and reliable structure, convenient operation, high degree of automation with a wide range of food machines is necessary. Based on the analysis of powder food machine automatic food processes and the use of the requirements on the basis of the key components of the theoretical analysis, a practical, simple, reliable and versatile drive system, a single package for the bag to expand the size and output of long adjustable structure; for delivery of the film structure, the structure of closed traction, closed-end structure, such as cutting off key parts of the design principles, structural features, such as doing a more detailed study and design; This paper analyzes the law of the Kinematics , optimizing the structure and put forward feasible to meet the food process; a key component of a complete design method, designed to meet the market demand,Promoting innovation. Key Words:automatic food machine, technology transmission, structure designing, CAD
摆臂的计算机辅助结构设计 系别:机械工程系 专业: 姓名: 学号:
摘要 此次毕业设计任务是对机床上手动加工控制进给的连杆摆臂的机械加工工艺与设计、孔加工的夹具的设计等。对于摆臂,它在加工的过程中,有它与其他零件的加工的共性,也有它加工相应的特性,它的共性无非就是它也想其它零件一样也需要铣削,也需要钻孔等一般件加工操作,而它的特别之处就在于它外形的不规则,不是方形,又不是圆柱,不是单一的铣削,或是车削能够完成的。因此,必要去设计一套更好的加工工艺方案,以适应它各方面的精度指标。 对于工艺路线的拟定,它是工艺规程制订中的关键阶段,是工艺规程制订的总体设计。所撰写的工艺路线合理与否,不但影响加工质量和生产率,而且影响到工人、设备、工艺装备及生产场地等的合理利用,从而影响生产成本。 所以,本次设计是在仔细分析曲轴零件加工技术要求及加工精度后,合理确定毛坯类型,经过查阅相关参考书、手册、图表、标准等技术资料,确定各工序的定位基准、机械加工余量、工序尺寸及公差,最终制定出该摆臂零件的加工工序卡片。 关键词: 摆臂加工工艺夹具设计CAD(计算机辅助设计)
一计算机辅助软件的介绍 1 计算机辅助设计的概述 计算机辅助设计(CAD-Computer Aided Design)指利用计算机及其图形设备帮助设计人员进行设计工作。在设计中通常要用计算机对不同方案进行大量的计算、分析和比较,以决定最优方案;各种设计信息,不论是数字的、文字的或图形的,都能存放在计算机的内存或外存里,并能快速地检索;设计人员通常用草图开始设计,将草图变为工作图的繁重工作可以交给计算机完成;由计算机自动产生的设计结果,可以快速作出图形,使设计人员及时对设计作出判断和修改;利用计算机可以进行与图形的编辑、放大、缩小、平移和旋转等有关的图形数据加工工作。 2 计算机辅助设计的发展历史 CAD(Computer Aided Design)诞生于60年代,是美国麻省理工大学提出了交互式图形学的研究计划,由于当时硬件设施的昂贵,只有美国通用汽车公司和美国波音航空公司使用自行开发的交互式绘图系统。 70年代,小型计算机费用下降,美国工业界才开始广泛使用交互式绘图系统。 80年代,由于PC机的应用,CAD得以迅速发展,出现了专门从事CAD系统开发的公司。当时VersaCAD是专业的CAD制作公司,所开发的CAD软件功能强大,但由于其价格昂贵,故不能普遍应用。而当时的Autodesk公司是一个仅有员工数人的小公司,其开发的CAD系统虽然功能有限,但因其可免费拷贝,故在社会得以广泛应用。同时,由于该系统的开放性,该CAD软件升级迅速。 设计者很早就开始使用计算机进行计算。有人认为Ivan Sutherland在1963年在麻省理工学院开发的Sketchpad是一个转折点。SKETCHPAD的突出特性是它允许设计者用图形方式和计算机交互:设计可以用一枝光笔在阴极射线管屏幕上绘制到计算机里。实际上,这就是图形化用户界面的原型,而这种界面是现代CAD不可或缺的特性。 CAD最早的应用是在汽车制造、航空航天以及电子工业的大公司中。随着计算机变得更便宜,应用范围也逐渐变广。 CAD的实现技术从那个时候起经过了许多演变。这个领域刚开始的时候主要被用于产生和手绘的图纸相仿的图纸。计算机技术的发展使得计算机在设计活动中得到更有技巧的应用。如今,CAD已经不仅仅用于绘图和显示,它开始进入设计者的专业知识中更“智能”的部分。 随着电脑科技的日益发展,性能的提升和更便宜的价格,许多公司已采用立体的绘图设计。以往,碍于电脑性能的限制,绘图软件只能停留在平面设计,欠
颗粒状糖果包装机设计 The Design of The Grain Candy Packer
摘要:颗粒状糖果包装机设计是典型的机械系统设计,它不仅包括机构的尺寸、强度设计,还包括了传动机械系统设计。本设计主要是针对圆台柱状巧克力糖的铝箔纸包装。设计主要内容有三方面:设计方案设计、机械手及进出糖机构设计与传动系统链设计。 机械手及进出糖机构设计是本设计功能能否执行的灵魂,它也是本设计的设计重点之一。它要实现巧克力糖的输入、折边、抄底边、等等功能,直到最后由输送带输出。整个系统功能实现中,机械手要实现的是夹糖、折边、转送等重要功能,因此对机械手的形状、夹紧力及转位角度也提出了不同的设计要求,设计机械手时,也始终回绕着这几点进行。 传动系统设计,作为一个动作执行系统,动力是必不可少的,当然对动力的传递系统也就显得尤其重要了。系统功能中要实现机械手转位、送糖盘转位、供纸、剪纸、抄纸、接糖、顶糖及拨糖等功能,它们都需要不同大小的动力,这就需要传动系统的调节。如在机械手的转位功能中,为实现间歇的转位功能就得通过传动链中的槽轮机构来实现,该机构要保证机械手在转到位后,有一定的停留时间,从而为顶糖、接糖及拨糖功能的实现提供必要的机械动作执行时间。设计好的包装机机构正常的生产率为120r/min,且其生产率可在70~130r/min. 关键词:包装机,巧克力糖包装,机械手。
Abstract: The grain candy packer design is a typical machine system design. It not only included the organization's size, strength...etc. the design. And it still included the design of the transmission system. This design primarily aims at the circle pillar chocolates' aluminum foil packing. The design only contents contain three sides: Design project design, machine hand and I/O sugar mechanism design and the transmission system design. It is Soul whether the function of the machine hand and I/O sugar mechanism’s design can carry out in this design. It is also one of the design points of this design. It wants to realize the importation, fold of the chocolates the sides, etc. the function. Until it finally be output by belt conveyer. In whole system function realizes, the machine hand realizes many important function, for example: clip the sugar, fold of the chocolates the sides, transfer...etc. Therefore to the shape of the machine hand, clip the tight dint and turn the angle also bring upped the different design request. When designed the machine hand, it is also proceeding with the center of these points. System, motive is necessary. Certainly it is particularly important of the power transmission system. In the system function, it must realize moving the machine hand, moving the sugar dish, providing the paper, cutting paper, curling, connecting the sugar, crest the sugar and dialing the sugar etc. All these functions need the different power. It can be controlled with the transmission system. Such as the function of turning machine hand, for realizing a function of intermittent turning it needs the sheave of the transmission to regulate. After the machine turned the assurance position, the mechanism wants to have certainly stop over time, it can take enough time to crest sugar, connect the sugar and dial sugar. The transmission system still guaranteed the normal rate of production of packer to 120 r/ min .At the same time it can be controlled the rate of production at 70 ~ 130 r/ min. Key words:Packer, chocolates packing, machine hand.
机械工程系毕业设计图纸CAD规范 根据我系有关毕业设计的要求,为统一毕业设计CAD图纸格式,规范毕业设计图纸图面,方便CAD文件的打印输出,特制定本规范要求。 一、图层设置 用LAYER命令按设定图层,赋予图层颜色、线型、线宽和其他需要设定的参数。 表1 图层设置
说明: a. 0层一般不允许放任何东西,是做块用的; b 不要在“定义点”(DEFPOINTS)层上画图,因为该层默认不打印; c 每个CAD文件中对层的定义应该一致,否则出图时多张图纸拼接到一个文件里会有干扰; d 打印出图时线宽的实现一般有两种方法:按颜色、按线宽。若图层中线宽的设置为“默认”(如表1)则打印时按照图形对象的颜色设置不同线宽出图;若图层中设置了具体的线宽则可按线宽出图。 习惯在图层上设置线宽的可按照下述方法设置: 在机械图样上,图线一般只有两种宽度,分别称为粗线和细线,其宽度之比为2:1。在通常情况下,粗线的宽度采用0.5或0.7 mm,对应的细线宽度采用0.25或0.35 mm。
机械工程的CAD制图所使用的字体,应按GB/T13362.4~13362.5中的要求:字体的号数(即字体高度h),其公称尺寸系列为:1.8,2.5,3.5,5,7,10,14,20mm;汉字的高度h不应小于3.5mm,其字宽一般约为0.7h;数字、字母一般应以斜体输出,汉字在输出时一般采用正体。 字体高度与图纸幅面之间的选用关系参见表2,以避免出现打印后图面字体过大或者过小的情况。 表2 字高与图幅的关系 表3 文字样式的设置 说明: a 每个CAD文件中对文字样式的定义和使用应该一致,否则多张图纸拼接到一个文件里出图时会有干扰; b 以A0图纸为例,尺寸文字和表格文字高度为5,相关文字如:标题栏中图名高度为10,“技术要求”和标题栏中单位名称高度为7; c 文字样式中的字体文件应选用矢量字体(见表3),避免使用“仿宋 _GB2312”这样的填充字体。
实现动态称量的包装自动线设计 陕西科技大学机电工程学院 陈婵娟 陈 参 曾东暖 摘 要:介绍一种能实现颗粒、粉末物料动态称量、包装和输送的全自动包装生产线。分析了颗粒、粉末物料包装线的特点,给出了生产线的组成及工艺流程,介绍了主要机械装置及控制系统的设计。 关键词:包装自动线;动态称量;充填封口机;控制系统 Abstract:The article covers an automatic bagging line that can weigh in m otion,bag and transmit grain and powder materi2 als.Main descriptions are the composition and technologic process as well as design of s ome main devices and control systems. K eyw ords:automatic bagging line;weighing in m otion;filling-sealing machine;control system 日趋规模化、国际化的现代化工业生产,要求包装作业依次完成自动包装、输送、检测、贮存等工序。一般的机械称量、手工装袋,不仅在速度、质量、卫生条件和花色品种等方面无法达到要求,单机操作设备和单一包装品种、规格的包装机产品也难以胜任其全部要求。本文设计一条能实现颗粒、粉末物料动态称量和包装的自动包装线,适用于食盐、面粉、粮食、饲料、水泥等生产加工企业的高质量大规模包装需要。 1 包装自动线组成及包装工艺流程分析颗粒和粉末物料一般采用袋装,即将物料充填到柔性材料制成的包装袋中,再进行排气(或充气)、封口、切断、包装。包装袋常用纸、铝膜、塑料薄膜及其复合材料,袋型及其大小主要取决于被充填物料的性质、容量及包装材料的性能,并与制袋封口方法和商品流通的使用要求等有直接关系。 物料包装自动线主要由称量机、成形充填封口机、物重选别机、打印机、输送机及控制系统组成。需要协同完成的包装工艺流程是:(1)包装材料输送 为避免柔性材料在不同张力作用下的伸缩,确保商标图案的完整,设置一个自动检测补偿装置。(2)包装材料成型 在成型机构作用下,将送到的包装材料制成规定的形状并封边,只保留一边开口填充物料。(3)物料称量与控制加填 物料经称量机称量后,靠加料机构装入已成型的包装袋内。(4)抽气或充气、封口 可在填料的过程中同时进行,有的产品包装好后要抽成真空(驱除空气防止氧化变质),有的则需要充入保护性的无菌气体(氮气等)。(5)切断送出 边制袋边加料的包装机一般都是在所有的包装操作完成后,再将其切断送出。(6)物重选别 二次称量,选出合格产品,不合格者分流剔除。 实现动态准确称重是整个工艺流程的关键,选择包装自动线上的称重机、成型充填封口机和物重选别机作为设计重点。 2 包装自动线主要机械装置设计 211 称重机 现代包装自动线控制性能的优劣以充填量的严格控制最为关键称量机是主要的实现机构,它主要包括盛料仓与称料斗以及支架等,主要容器的材质为不锈钢板或铝合金板。 21111 盛料仓设计 通常的自重式直流型下料装置,一般都采用双料口下料,大料口负责主要的下料任务,能尽快地下料到接近目标重量,小料口只是补充差额。经过反复试验,由于大料口下料时,落料重量及其所产生的冲击力大,残留料柱重量的随机性大,致使称量高精度和高速度的矛盾不易解决,达不到较高的要求。因此,设计了3料口下料装置,盛料仓底部安装有大中小3 个闸门,分别由3个气缸控制。盛料仓放料示意图如图1所示,Wg0为称重前称料斗皮重,Wg1、Wg2、Wg3分别为设定目标重量的90%、98%和100%。起始3个下料口都打开快速下料,重量到达Wg1时大下料口关闭中速下料,到 图1 盛料仓放料示意图
基于PLC的糖果包装机的控制系统设计设计
目录 1 绪论 (1) 2 糖果包装机系统分析及控制系统总体设计 (3) 2.1Y06型糖果包装机生产工艺概述 (3) 2.2糖果包装机控制要求 (3) 2.2.1PLC控制系统方式选择 (3) 2.2.2系统运行方式 (4) 2.3 糖果包装机控制系统主要器件的选择 (4) 2.3.1包装机控制对象分析 (5) 2.3.2 PLC控制器的选择 (6) 2.3.3 变频器选择 (6) 2.3.4 步进电机及其驱动器选择 (6) 2.3.5传感器选择 (9) 3 糖果包装机各功能模块设计 (10) 3.1供电模块设计 (10) 3.2执行主电机模块设计 (11) 3.3包装纸同步控制模块设计 (12) 4 糖果包装机主要控制系统的PLC程序设计 (15) 4.1 糖果包专机的控制系统设计简述 (15) 4.2 主电机的PLC控制指令语句表 (17) 4.3 糖果包装机包装机的PLC控制I/O分配表 (18) 结论 (20) 致谢 (21) 参考文献 (22) 附录 (23) 附录A (23)
1、绪论 食品行业是满足人民“衣食住行”需求的基础性行业,在国民经济中处于重要地位,具有不可替代性,尤其是目前我国居民收入日益提高、生活质量不断改善,对食品的需求也日趋多样化,全国食品工业面临良好发展契机,食品工业规模快速增长,经济效益也大幅提升,产业结构和增长方式进一步优化。去年食品工业增加值占全国工业经济比重达到十分之一强,并且呈逐年上升趋势。 食品行业的快速发展必定会带动食品包装业的发展,所以对食品包装机 的改造创新是非常必要的。 图1-1 Y06 型糖果包装机系统外观图 Y06型糖果包装机是一款高速糖果包装机械,可用于包装各类块状糖果。整个设备可以分为三大部分:生产线送糖部分,糖果包装部分,包装纸部分。其总体系统外观图如图1-1所示。 生产送糖部分部分直接与糖果生产线相连,通过传送带将糖果送至糖果包装部分入口处。该部分仅可通过一颗糖果,糖果经过此通道过后形成队列,依次从包装入口进入如图1-2所示 31
目录 1 黏稠液体包装机的方案设计与基本原理 (3) 1.1方案设计论述 (3) 1.2运动基本原理 (4) 2 黏稠液体包装机的类型选择与主要参数 (6) 2.1包装机类型的确定 (6) 2.2机器性能参数 (6) 3 黏稠液体包装机传动系统的计算 (7) 3.1电动机的选择计算 (7) 3.2V带传送及带轮的设计计算 (7) 3.2.1 总传动比的分配 (7) 3.2.2 V带及带轮传动设计 (7) 3.3主轴(包含轴承)的设计计算 (11) 3.4减速器的设计与选择计算 (11) 3.5联轴器的选择计算 (12) 3.6无极变速器的选择与性能要求 (12) 3.7凸轮机构的设计计算 (12) 3.7.1 基圆半径的选择 (13) 3.7.2 凸轮轮廓线的设计 (13) 3.8渐开线直齿圆柱齿轮的设计计算 (18) 3.8.1选定齿轮类型、精度等级、材料及齿数 (18) 3.8.2按齿面接触强度设计 (18) 3.8.3 圆柱齿轮几何尺寸计算 (20) 3.9直齿锥齿轮的设计计算 (20) 3.9.1第一对锥齿轮: (20) 3.9.2第二对锥齿轮 (23) 3.10曲柄摇杆机构的设计计算 (24) 3.10.1 曲柄摇杆机构一:充填机构阀门 (24) 3.10.2 曲柄摇杆机构二:充填机构的活塞杆处 (25) 3.11离合器的设计与选择 (25) 4 黏稠液体包装机执行机构的设计计算 (26) 4.1供料填充机构的设计 (26)
4.2薄膜送纸机构的设计 (27) 4.3步进电动机的选择 (27) 4.4成型器的设计 (28) 4.5热封与切断机构的设计 (31) 毕业设计总结 (33) 致谢 (34) 参考文献 (35)
毕业设计图纸 篇一:本科毕业设计图纸要求--2013 图纸要求:A3号或A2号。 设计要求:设计说明书每人按照自己水量进行设计计算,鼓励采用各种不同形式,在设计稿纸绘制草图。图纸初绘后,经指导老师检查后,再修改,再检查修改完,再上交。图纸标题栏,图例,说明,线型,线宽,尺寸标注,比例尺,文字等等不要搞错。图纸最后折叠把标题栏折出,标题栏包括图名,比例尺,班级,姓名,学号,指导,日期,成绩等等。 所有未尽事宜,在每日设计指导,答疑时解决。 绘图步骤: 1)根据设计计算,绘制草图; 2)根据图幅,制定比例尺并设置图形界限,绘制图形框; 3)绘制构筑物的轮廓; 4)绘制管道; 5)绘制附属设施; 6)进行文字说明; 7)进行尺寸标注及文字标注 8)加入其它标识:图框、会签栏、标题栏、比例尺、图名线、剖
线、填充、截断线、对称线、风向玫瑰图、指北针和地面线等等。 绘图要求: 1)图框、内框、图纸标题栏、会签栏见设计制图标准。 2)线宽见设计制图标准 管道b图名线、剖线b 构筑物0.5b 其它0.25 b b可取0.8mm. 3)常见比例尺见设计制图标准 4)标高,管径说明见设计制图标准,标高三角高3.5mm 5)字体高3.5 mm.,图名高5 mm 6)剖线见设计制图标准 7)填充见设计制图标准 8)截断线、对称线、和地面线见设计制图标准 9)引出线见设计制图标准,采用45度 10)剖面线填充见设计制图标准 篇二:毕业设计图纸相关标准 毕业设计图纸相关标准 一、图纸幅面大小及图框格式 按国家标准规定的图纸幅面大小及格式,图纸均留装订边,具体尺寸及图框格式如图1和表1所示。 图1 表1
目录 1 绪论 (1) 2 糖果包装机系统分析及控制系统总体设计 (3) 2.1Y06型糖果包装机生产工艺概述 (3) 2.2糖果包装机控制要求 (3) 2.2.1PLC控制系统方式选择 (3) 2.2.2系统运行方式 (4) 2.3 糖果包装机控制系统主要器件的选择 (4) 2.3.1包装机控制对象分析 (5) 2.3.2 PLC控制器的选择 (6) 2.3.3 变频器选择 (6) 2.3.4 步进电机及其驱动器选择 (6) 2.3.5传感器选择 (9) 3 糖果包装机各功能模块设计 (10) 3.1供电模块设计 (10) 3.2执行主电机模块设计 (11) 3.3包装纸同步控制模块设计 (12) 4 糖果包装机主要控制系统的PLC程序设计 (15) 4.1 糖果包专机的控制系统设计简述 (15) 4.2 主电机的PLC控制指令语句表 (17) 4.3 糖果包装机包装机的PLC控制I/O分配表 (18) 结论 (20) 致谢 (21) 参考文献 (22) 附录 (23) 附录A (23)
1、绪论 食品行业是满足人民“衣食住行”需求的基础性行业,在国民经济中处于重要地位,具有不可替代性,尤其是目前我国居民收入日益提高、生活质量不断改善,对食品的需求也日趋多样化,全国食品工业面临良好发展契机,食品工业规模快速增长,经济效益也大幅提升,产业结构和增长方式进一步优化。去年食品工业增加值占全国工业经济比重达到十分之一强,并且呈逐年上升趋势。 食品行业的快速发展必定会带动食品包装业的发展,所以对食品包装机的改造创新是非常必要的。 图1-1 Y06 型糖果包装机系统外观图 Y06型糖果包装机是一款高速糖果包装机械,可用于包装各类块状糖果。整个设备可以分为三大部分:生产线送糖部分,糖果包装部分,包装纸部分。其总体系统外观图如图1-1所示。 生产送糖部分部分直接与糖果生产线相连,通过传送带将糖果送至糖果包装部分入口处。该部分仅可通过一颗糖果,糖果经过此通道过后形成队列,依次从包装入口进入如图1-2所示 1
颗粒包装机毕业设计 摘要 本论文是关于小颗粒食品的包装设备简称颗粒包装机的设计。颗粒包装机是将小颗粒的食品装入袋内,再封装。主要适用于小食品、医药产品的包装。它具有操作简单、生产量大、适用范围广等特点。 颗粒包装机主要由几部分构成:引导成型部分、喂料部分、纵封牵引部分横封切割部分。塑料薄膜安装在退卷装置上,经过导辊的引导输送塑料薄膜在成型器的作用下形成袋状,这时纵封将袋封上纵向口,喂料装置下料,横封辊在将其封住横向开口,并且切断。至此一个包装袋形成。 本文从基本理论、基本工作原理、基本分析方法上对设计作了阐述。在本次设计中采用了象鼻成型器,转盘式定量供料器,滚轮纵封装置,整体加工式横封辊结构。 滚轮纵封装置将以往的纵封和牵引合为一体,这样既节省了空间,又使整体更具有美观性。整体加工式横封辊结构将横封和切断装置合成一体,减少了封装时间。 最后一个重要的部分是UG的建模、装配。Unigraphics(简称UG)是当前世界上最先进和紧密集成的、面向制造行业的CAID/CAD/CAE/CAM高端软件。 I
作为一个集成的全面产品工程解决方案,UG软件家族使得用户能够数字化地创建和获取三维产品定义。UG软件被当今许多世界领先的制造商用来从事概念设计、工业设计、详细的机械设计以及更成仿真和数字化的制造等各个领域。 本文详细介绍了轴的建模、齿轮的建模,以及其装配和动态仿真。 关键字:颗粒包装机;纵封;横封;UG装配 Abstract This paper is about the design of the packing equipments with small grain food which is call for grain packer. the grain packer is to pack the food of the small grain into the bag inside, then seal the bag. It is applicable to the packing of small food, medicine product primarily. It has the operation simple、produce have great capacity、apply wide etc. in scope characteristics. The grain packer is main from several parts of composingses: the part of the leading models and the part of feeding machine device, the part which vertical-seal and draught, and the part which horizontal-seal and cut down. The plastics thin film installs at equipment for withdraw the film, hasing been led the leading roller to molding machine, with which the film is form pockety, at this time vertical-seal seal the vertical caliber, feeding machine put the feed into the pockety, horizontal-seal seal the horizontal caliber, and cut off. Thus pockety is done. This paper makes to expatiate to the design from the basic theories, basic work principle, basic analysis method. Vertical-seal rolling device will be former seals with lead to match for integral whole, thus this device saved the space, and make the whole even have the beautiful again. Integer machining type horizontal-seal make the II
包装机械作为专业性机械,除了普通机械的一般要求外,还有外表美观、传动装置紧凑、运转平稳、精度高、生产效率高等要求,以很好地完成自身功能,适应市场需求。二、国外包装机械业概况美国、日本、德国、意大利是世界上包装机械四大强国。美国是世界上包装机械发展历史较长的国家,早已形成了独立完整的包装机械体系,其品种和产量均居世界之首。10多年来,美国始终保持着世界最大包装机械生产和消费大国的地位。其产品以高、大、精、尖产品居多,机械与计算机紧密结合,实现机电一体化控制。新型机械产品中以成型、填充、封口三种机械的增长最快,裹包机和薄膜包装机占整个市场份额的15%,纸盒封盒包装机在市场占有率中居第二位。从上世纪90年代初以来,美国包装机械业一直保持着良好的发展势头。美国国内包装机械市场在全球是首屈一指的,各种包装机械主要内销,1998年美国包装机械国内消费占82%,出口只占产值的18%,但出口额大。美国的包装机械制造厂大部分附属于大型包装材料厂,销售也完全依赖母公司。中国已成为继加拿大、墨西哥、日本、英国、德国之后,美国包装机械的第6大出口市场。 日本与美国、德国相比,起步较晚。上世纪60年代以前,包装机械厂家不足60家,只能包装糖果、香烟等。60-70年代,是日本包装机械业起步阶段,产值增长速度很快。70-80年代,增长速度虽不如上一阶段那么高,但年增长率仍达13%。80-90年代是稳定增长分阶段,将微电子技术成功地应用于包装机械的控制,以后又将光导纤维技术、工业机器人技术、模块化技术应用于包装机械,达到安全性高、无人操作、高
生产率的水平,大大提高了其国际市场竞争力。因此,从上世纪60年代到90年代初,日本包装机械工业连续30多年高速增长,经历了引进--消他--发展的过程。 日本的包装机械制造厂以中小企业为主,包装机械的品种近500种,规格有700多个。包装机械以中小型单机为主,具有 第2/3页体积小、精密度高、易安装、操作方便、自动化程度高等优点。90年代以来,已将变频调整、光电追踪、无触点电子开关、动态数据显示等技术运用在包装机械中。日本包装机械的很大一部分用于食品包装领域,食品包装机械产值占包装机械总产值的一半以上。 日本包装机械的主要市场是本国,出口额只占产值的10%。亚洲是日本包装机械的主要出口市场。从上世纪90年代以来,日本对中国的出口额连年大幅增长,自1995年起,中国已成为日本包装机械的最大出口国。 德国、意大利、英国、瑞士和法国等,都是世界上很重要的包装机械生产国家。欧洲各国包装机械业的一个共同特点,是出口比例(出口额占产值的比例)都很大,如德国和意大利近80%,瑞士超过90%,荷兰出口额甚至大于产值,因为荷兰是欧洲很重要的贸易转口地。 德国的包装机械在计量、制造、技术性能等方面居领先地位,特别是啤酒、饮料灌装设备具有高速、成套、自动化程度高、可靠性好等特点,享誉全球。一些大公司生产的包装机械集机-电-仪及微机控制于一体,采用光电感应,以光标控制,并配有防静电装置。其大型自动包装机不仅包装容积大,而且能集制袋、称重、充填、抽真空、封口等工序
毕业设计(论文) 计算机辅助设计在生产中的应用 院(系)名称: 专业名称: 班级名称: 学生学号: 学生姓名: 指导教师:
计算机辅助设计在生产中的应用 摘要 计算机辅助设计是利用计算机及其图形设备帮助设计人员进行设计工作,简称CAD。在工程和产品设计中,计算机可以帮助设计人员担负计算、信息存储和制图等项工作。在设计中通常要用计算机对不同方案进行大量的计算、分析和比较,以决定最优方案;各种设计信息,不论是数字的、文字的或图形的,都能存放在计算机的内存或外存里,并能快速地检索;设计人员通常用草图开始设计,将草图变为工作图的繁重工作可以交给计算机完成;利用计算机可以进行与图形的编辑、放大、缩小、平移和旋转等有关的图形数据加工工作。 随着现代计算机技术的飞速发展,计算机辅助设计CAD(Computer Aided Design)在生产中的应用日益广泛,本文主要从计算机辅助设计在机械生产中的应用等方面阐述了其在机械设计中的显著优势,并对目前国内企业机械产品开发过程三维CAD系统应用现状和存在问题进行了分析。从产品开发的实际需求和产品特点与软件功能出发,对企业应用三维CAD过程提出了改进方案,最后介绍了三维CAD技术发展的趋势。
1 绪论 1.1课题背景及目的 计算机的发展及应用,使人们的生活日新月异。计算机辅助设计源于计算机图形技术的产生,计算机辅助设计的研究构想发端于1950年,但最早记录是在1963年,美国麻省理工学院的研究人员 伊凡?苏泽 兰在美国计算机联合会会议上发表了名为《画板》的论文,从而开始了计算机辅助设计的发展历程。他从1950年开始着手开发通过图形技术来处理人与电脑交互对话的操作系统。1963年这套以电脑主机、显示屏、光电笔和键盘为工具的图形画线系统得到实现。这套图形画线系统开发和引进了许多计算机绘图的基本思想和技术,使用户可以运用电脑画出直线、复杂曲线以及简单的标准部件。 最初CAD被解释为“计算机辅助绘图”,由于当时计算机在设计上的作用是替代传统手工绘图的一种新工具,但随着后来信息技术的飞速发展,计算机技术在各领域的广泛应用,CAD的含义也在不断变化扩展,随着20世纪70年代像素的产生、80年代三维曲面造型系统的开发等,使电脑绘图从只能用“线”这一基本绘制元素发展到可以用点、面、体进行绘制计算机图形,从而使CAD的含义也发展成现在人们比较熟知的计算机辅助设计