张家口一次冰雹暴雨不同阶段的雷达资料分析
白连忠1,孙晓霞2
1河北省张北县气象局,2张家口市气象局
[摘要] 利用天气学、新一代天气雷达(CINRAD/CB)探测资料,详细分析了张家口市涿鹿县2009年7月19日的大冰雹、暴雨雷达回波发展演变过程。由雷达基本反射率、速度场、回波顶高、垂直积分
液态含水量和风廓线等资料分析表明,强降水过程都有明显的天气系统对应,回波顶高和垂直积分液态含
水量的变化较明显,并伴有“V”型缺口和明显的片状、块状回波现象对冰雹的产生有很好的指示意义。
关健词新一代天气雷达,大冰雹,雷达回波,临近预报
1引言
新一代天气雷达为临近天气预报和灾害性天气警报提供了重要的高质量的大气观测资料,它与其他大气观测系统一起能更加完整地给出大气状况的图像。因此充分地利用好新一代天气雷达探测数据,能提高灾害性天气的预报能力、气象服务能力和防灾减灾能力,使它在气象业务中发挥更大的作用[1]。
冰雹是我国主要的自然灾害之一,冰雹灾害的出现常常有突发性、短时性、局地形等特征,一旦发生,猝不及防,这使得对它的预测非常困难[2]。大冰雹是指降落到地面时直径超过20mm的冰雹。产生大冰雹的强对流风暴最显著的特征体现在:反射率因子垂直剖面图上高悬的反射率因子高值区。具体地讲,如果-20℃等温线对应的高度之上有超过45dbZ的反射率因子核,则有可能产生大冰雹。相应反射率因子核心的值越大,相对高度越高,产生大冰雹的可能性和严重程度越大[3]。在回波形态上,宽广的弱回波区WER或有界弱回波区BWER非常有利于大冰雹的产生。本文利用常规天气图、新一代雷达资料等对这次对流性天气过程进行分析,为今后做好张北雷达资料的分析,更好的监测强降水天气,做好短时临近天气预警预报提供参考。
2天气实况
2009年7月19日17时24分至45分大冰雹袭击了涿鹿县。其中2个乡镇,27个行政村出现冰雹,最大冰雹的直径为60mm,最大冰雹的重量为20g,最大平均重量为10g,伴随降水量19mm。受灾户数7517户,受灾人口22038人,受灾面积为1494.4hm2,成灾面积1494.4hm2,灾害造成直接经济损失663万元。
同时,张家口市出现了全市范围雷阵雨天气。降水量分布不均,西北部为小雨,东南部达到中到大雨,其中怀来和涿鹿大部、赤城东部、阳原北部、蔚县南部为大雨,局部暴雨,最大为怀来的鸡鸣驿69.6mm。
3天气形势分析
2009年7月19日08时500hpa高度场上,巴尔喀什湖附近为一较稳定的低槽,在35°N-50°N、
70°E-130°E区间的大气环流为纬向型,槽的底部从巴尔喀什湖经我国新疆、蒙古到朝鲜半岛盛行偏西、西北西气流,河套以西有西风槽,槽后有明显冷平流;槽线往东到承德以北的偏西气流中出现20-28 m/s的大风核,张家口市正好处于此大风核的东南象限。08时700hpa上低槽也位于河套以西,两层低槽近于垂直;在河套南部沿着312线有西南低空急流一直到河套的东北部;张家口市上空700hpa的风速为6m/s,而500hpa上风速为28m/s,说明在这两层之间有很强的风速垂直切变,850hpa上是西南风,700hpa以上为西北风,这种风向风速的垂直切变是造成强对流天气的关键。08时850hpa上在张家口市以西有一条东北-偏西走向的切变线,有利于构成强对流天气发生的触发机制。
4回波特征分析
4.1基本反射率分析
17时06分回波已经进入涿鹿县的北部,其强度回波有45dBZ,并且向东运动加强。17时12分涿鹿西北部回波很强50dBZ,17时30分强回波正在涿鹿上空是55dBZ。向东移动进入怀来,17时54分强回波已进入怀来,开始影响怀来,18时35分怀来出现短时暴雨20.4mm。22时06分在宣化西部至阳原一带又有带状回波生成,向东偏南方向移动,23时前后到涿鹿怀来一带加强,另在蔚县西部有强回波向蔚县移动,直至在03时12分才衰减为普通的雷雨云团。
4.2 “V”型缺口
一般情况下,“V”型缺口冰雹云是典型冰雹云特征中最常见的一种[4]。“V”型缺口是由于较强的降雹区会对电磁波产生强烈衰减,在远离雷达一侧出现呈“V”型的无回波缺口,缺口顶端的强回波也就是强降雹区的所在。“V”型缺口是雹暴回波的一个重要形态特征,因而是识别雹暴的一个十分有用的指标。
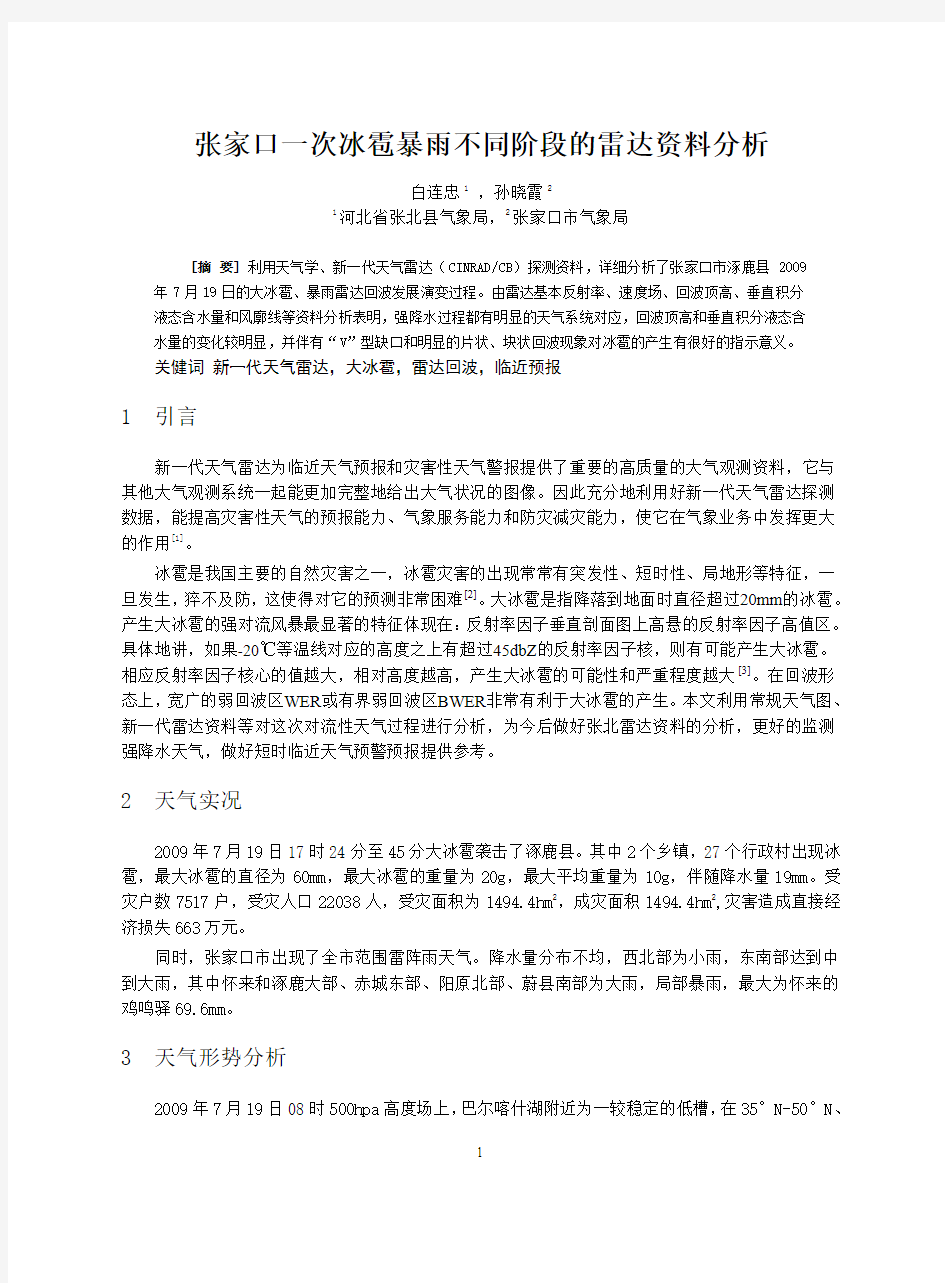
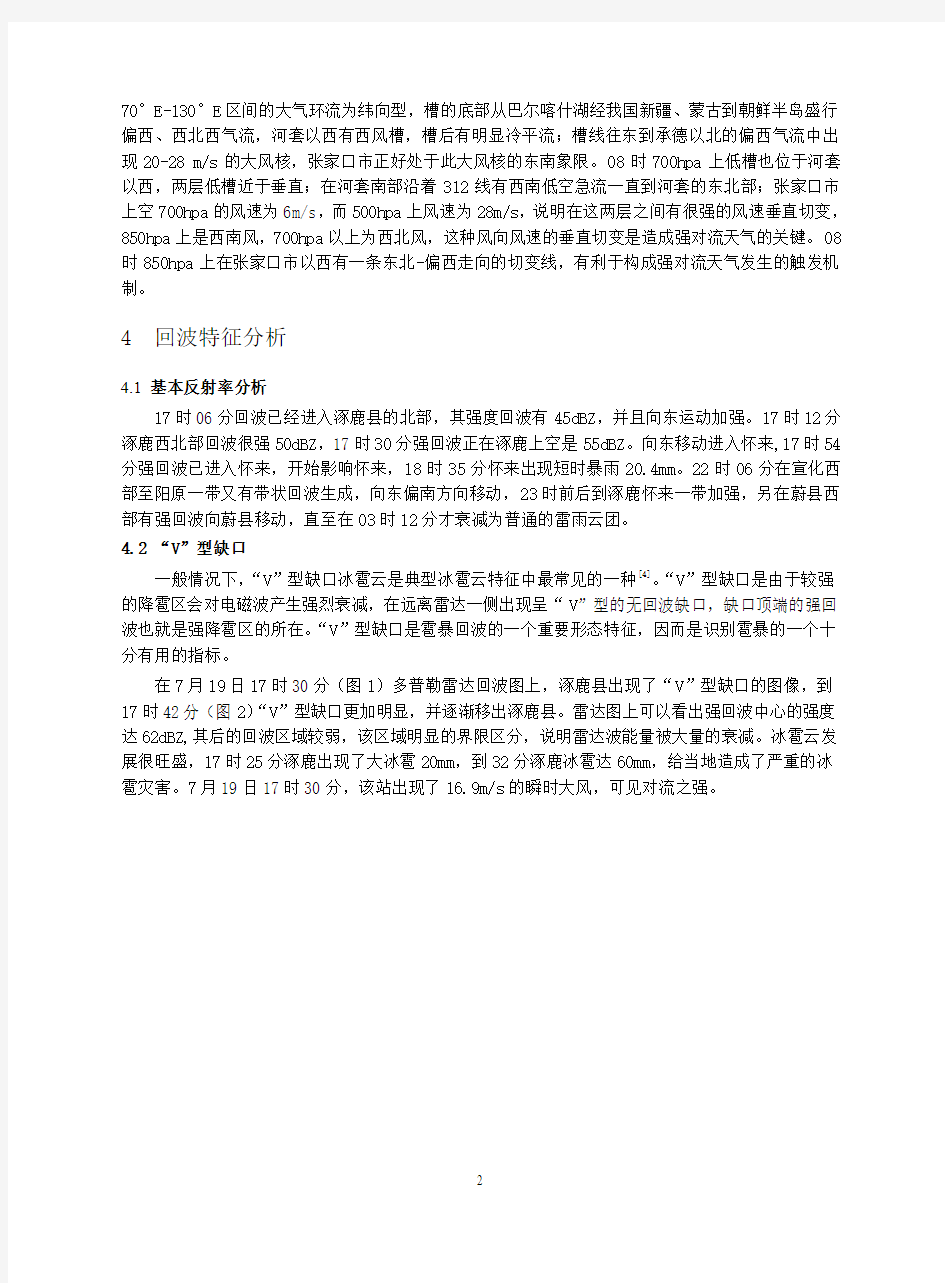
在7月19日17时30分(图1)多普勒雷达回波图上,涿鹿县出现了“V”型缺口的图像,到17时42分(图2)“V”型缺口更加明显,并逐渐移出涿鹿县。雷达图上可以看出强回波中心的强度达62dBZ,其后的回波区域较弱,该区域明显的界限区分,说明雷达波能量被大量的衰减。冰雹云发展很旺盛,17时25分涿鹿出现了大冰雹20mm,到32分涿鹿冰雹达60mm,给当地造成了严重的冰雹灾害。7月19日17时30分,该站出现了16.9m/s的瞬时大风,可见对流之强。
图1 2009年7月19日17时30分0.5°仰角反射率因子图
图2 2009年7月19日17时42分0.5°仰角反射率因子图
4.3 基本速度
从17时24分不同仰角的径向速度图(图3)可以看出,在低层(0.5°仰角)是一逆风区,最大正、负速度分别为27.3m/s和-16.1m/s, 9.9°仰角的速度图上(图略)有反气旋性辐散。表明底层有入流气流,高空有强的出流,对流旺盛,这正是冰雹生长的有利条件。
图3 2009年7月19日17时24分0.5°仰角径向速度图
4.4 风廓线雷达
从风廓线产品(图4)可以看出,在17时06分至48分,从低层到高层为西南风到偏东风,风速随高度的增加而增加,风向随高度开始呈现明显的顺转,说明低层为暖平流,并且垂直风廓线上风速随高度的增加而增加,造成了大气层结的不稳定,为超级单体的发展提供了动力条件。
图4 2009年7月19日17时48分风廓线产品图
4.5 回波顶高和垂直积分液态含水量
回波顶呈阶梯形,17时06分冰雹进入涿鹿北部时回波顶高仅有8km(图5),17时30分回波顶高发展到12km,局部达到15km(图6),说明云中上升气流旺盛,高回波顶基本对应大的垂直累积液态含水量VIL值。
图5 2009年7月19日17时06分0.5°仰角回波顶高图
图6 2009年7月19日17时30分0.5°仰角回波顶高图
垂直积分液态含水量是反映降水云体中垂直液态含水总量分布图象的产品,它是判别强降水及降水能力、强对流天气和冰雹等灾害性天气的最有效的工具之一,其定义为液态水混合比的垂直积分。液态水混合比是通过雷达测量的反射率因子和雨滴之间的经验关系
M=3.44*10-3Z4/7
进行计算的。对上式进行垂直积分即可得到垂直累积液态水含量VIL。Amburn[5]定义VIL与风暴顶高度之比为VIL密度。他们的研究表明,如果VIL密度超过4g*m-3,则风暴几乎肯定会产生直径超过20mm 的大冰雹。
17时06分冰雹进入涿鹿北部时垂直积分液态含水量仅有30kg/m2(图7),17时30分垂直积分液态
含水量高达50 kg/m2(图8),局地强降雹的概率加大,而这块强雷暴恰恰影响了涿鹿地区。通过分析垂直积分液态含水量的大值区,为预测此次冰雹落区提供了一定的科学依据。
对于雷达机务员兼预报员来说,当回波顶高≥8km,垂直积分液态含水量≥30kg/m2时,要看速度场是否出现了逆风区。还要注意主体回波移向右侧新生的弱回波区的发展变化,尽早的做好临近预报。
图7 2009年7月19日17时06分垂直积分液态含水量图
图8 2009年7月19日17时30分垂直积分液态含水量图
5探空图
从2009年7月19日08时探空图(图9)上看,对流层低层(700hPa以下)有暖平流,以上有
弱的冷平流,并有明显的垂直风切变。此图零度层高度在600hPa等压面高度附近,-20℃层高度在400hPa等压面高度附近,比较有利于成雹。在500hPa到400hPa之间有潜在的不稳定能量;沙氏指数为-2.5<0,K指数达到35,说明此时大气层结处于极不稳定状态。
图9 2009年7月19日08时探空曲线图
6小结
短期天气形势和雷达产品分析相结合对强对流天气过程预报意义很大,雷达产品是验证天气系统演变及跟踪强对流天气的重要工具,从本次雷达回波上分析可得到:
⑴短时强降水往往受到高空槽、低层切变线和地面辐合线的共同影响,回波一般呈现带状或片状,并伴有“V”型缺口等指示性很强的回波特性。多数情况下,在主体回波移向右前侧易激发新回波,而新生的弱回波区也易发展增强,主体回波移向左侧的回波带减弱甚至消失。
⑵从垂直积分液态含水量VIL和基本反射率图上比较可以得出,强反射率中心同时也是VIL 值较大区域,当有冰雹产生时,VIL的超大值区,也是冰雹产生的必要条件之一。
⑶与强上升气流有关的多普勒雷达产品,如有界弱回波区的形成、回波顶高和垂直积分液态含水量的明显反映了冰雹云内物理特征量的短时急骤变化并形成冰雹的特点,对冰雹的临近预报提供了强信号。
⑷雹云的结构是复杂的[6],也不是某一种模型能全部概括的,而且不同地区、不同季节都有很大差异。但有一个共同特点是强回波中心在5km以上,尤其是9~12km处的回波强度及其强度的垂直梯度大,速度图上有明显的零速度线,水平切变和垂直切变都很明显。
⑸张北雷达站和张家口气象台对此次强对流天气进行了较好的预报服务,但通过对相关资料的详细分析,如果能够进一步加强联防,加强对资料的综合分析能力,将能够更有效地发布预警。
参考文献
1张沛源[,杨洪平]. 新一代天气雷达在临近预报和灾害性天气警报中的应用[J].2008,30-31.
2金晓中[,贡觉顿珠].那曲冰雹天气的气候特征分析[J].西藏科技.2007,1(3):61-63.
3Witt A,M D Elits[,G J Stumpf et al.An enhanced hail detection algorithm for the WSR-88D][J]. Wea Forecasting,1998, 13:286-303.
4俞小鼎.新一代天气雷达业务应用论文集[M].北京:气象出版社,2006.314-316.
5Amburn S A[,P L Wolf].VIL Density as a Hail Indicator[J].Wea Forecasting,1997,12:473-478.
6张沛源.飑线雹暴不同发展阶段的垂直流场特征[J].高原气象,1983,2(3):40-48.
练习题2 1.业务运行的多普勒天气雷达通常采用体积扫描的方式观测。我国业务运行多普勒雷达通常采用的体描模式(VCP11、VCP21、VCP31)2.多普勒天气雷达与常规天气雷达的主要区别在于:前者可以测量目标物(沿雷达径向速度),从而大大加强了天气雷达对各种天气系统特别是(强对流天气系统)的识别和预警能力。 3.新一代雷达系统对灾害天气有强的监测和预警能力。对台风、暴雨等大范围降水天气的监测距离应不小于(400km)。 4.新一代雷达系统对灾害天气有强的监测和预警能力。对雹云、中气旋等小尺度强对流现象的有效监测和识别距离应大于(150km)。 5.新一代雷达观测的实时的图像中,提供了丰富的有关(强对流天气)信息。 6.新一代雷达速度埸中,辐合(或辐散)在径向风场图像中表现为一个最大和最小的径向速度对,两个极值中心连线和雷达射线(一致)。7.新一代雷达速度埸中,气流中的小尺度气旋(或反气旋),在径向风场图像中表现为一个最大和最小的径向速度对,但中心连线走向则与雷达射线相(垂直)。 8.新一代天气雷达观测采用的是北京时。计时方法采用24小时制,计时精度为秒。 9.速度场(零等值线)的走向不仅表示风向随高度的变化,同时表示雷达有效探测范围内的(冷、暖平流)。 10.在距离雷达一定距离的一个小区域内,通过对该区域内沿雷达径向速度特征的分析,可以确定该区域内的气流(辐合)、(辐散)和(旋转)等特征。 11.天气雷达是用来探测大气中降水区的(位置)、大小、强度及变化
12.气象目标对雷达电磁波的(散射)是雷达探测的基础。 13.气象上云滴、雨滴和冰雹等粒子一般可近似地看作是圆球。当雷达波长确定后,球形粒子的散射情况在很大程度上依赖于粒子直径D 和入射波长λ之比。对于(D远小于λ)情况下的球形粒子散射称为瑞利散射;而(D与λ尺度相当)情况下的球形粒子散射称为(Mie)米散射。 14.多普勒天气雷达使用低脉冲重复频率PRF测(反射率因子),用高脉冲重复频率PRF测(速度)。 15.每秒产生的触发脉冲的数目,称为(脉冲重复频率),用PRF 表示。两个相邻脉冲之间的间隔时间,称为(脉冲重复周期),用PRT表示,它等于脉冲重复频率的(倒)数。 16.降水粒子产生的回波功率与降水粒子集合的反射率因子成(正比)。与取样体积到雷达的距离的平方成(反比)。 17.S波段天气雷达是(10)cm波长的雷达。 18.在天线方向上两个半功率点方向的夹角称为(c波束宽度)。19.在强回波离雷达(较近)时,有可能产生旁瓣造成虚假回波. 20.降水粒子的后向散射截面是随粒子尺度增大而(增大)。 21.0 dBZ、-10dBZ、30dBZ和40dBZ对应的Z值分别为(1)、(0.1)、(1000)、(10000) (mm6/m3)。 22.SA雷达基数据中反射率因子的分辨率为(1km×1°)。 23.写出Z-I关系的表达公式 (b Z ) AI 24.Ze的物理意义是(所有粒子直径的6次方之和)。 25.雷达反射率η是单位体积中,所有降水粒子的(雷达截面之和)。 26.雷达气象方程说明回波功率与距离的(二)次方成反比。
多普勒雷达系统仿真
精品好文档,推荐学习交流 摘要 现代通信系统要求通信距离远、通信容量大、传输质量好,作为其关键技术之一的调制解调技术一直是人们研究的一个重要方向。本文以MATLAB为软件平台,充分利用其提供的通信工具箱和信号处理工具箱中的模块,对数字调制解调系统进行Simulink设计仿真,并且进行误差分析。 数字化正交数字化正交调制与解调是通信系统中十分重要的一个环节,针对不同的信道环境选择不同的数字化正交数字化正交调制与解调方式可以有效地提高通信系统中的频带利用率,改善接收信号的误码率。本设计运用Simulink仿真软件对二进制调制解调系统进行模型构建、系统设计、仿真演示、结果显示、误差分析以及综合性能分析,重点对BASK,BFSK,BPSK进行性能比较和误差分析。在实际应用中,视情况选择最佳的调制方式。 本文首先介绍了课题研究的背景,然后介绍系统设计所用的Simulink仿真软件,随后介绍了载波数字调制系统的原理,并根据原理构建仿真模型,进行数字调制系统仿真,最后对设计进行总结,并归纳了Simulink软件使用中需要注意的事项。本文的主要目的是对Simulink的学习和对数字调制解调理论的掌握和深化,为今后在通信领域继续学习和研究打下坚实的基础。 关键字:排通信系统,Simulink仿真,数字化调制解调,BASK,BFSK
精品好文档,推荐学习交流 ABSTRACT TheThe Modern communication systems require communication distance, large communication capacity, good transmission quality, as one of its key technologies modem technology has been an important direction for researchers. In this paper, MATLAB software platform, providing full use of its communications toolbox and signal processing toolbox module, digital modulation and demodulation system Simulink design simulation and error analysis. Modulation and demodulation is a very important part of the communication system, for different channel environment to select different modulation and demodulation system can effectively improve the spectrum efficiency in a communication system, improve the bit error rate of the received signal. This design using Simulink simulation software binary modulation and demodulation system modeling, system design, simulation demo showed that the error analysis and comprehensive performance analysis, focusing on the BASK, BFSK, BPSK performance comparison and error analysis. In practice, as the case may select the best modulation. This paper describes the background of the research, then describes the system design using Simulink simulation software, then introduced the carrier digital modulation system of principles, and build a simulation model based on the principle of digital modulation system simulation, and finally the design summary and induction Simulink software matters that need attention. The main purpose of this paper is to study and Simulink digital modem theory of mastery and deepening for the future to continue learning and research in the field of communication and lay a solid foundation. Key Words: queuing theory, demand management, telecom offices
自适应阵列天线 自适应阵列天线(如图9.3所示)是N 个天线的集合,天线的输出送到加权求和网络,加权值随信号自动调整以减少不需要信号的影响,并增大求和网络输出中所需的信号。输出 信号z 经包络检波并与合适门限α 相比较以发现有用的信号[28][34]~[40]。自适应阵列天线是前 面章节中描述的SLC 系统概念的推广。我们首先考虑干扰对消及目标增强的基础理论,然后把注意力集中在使用自适应阵列天线来获得超分辨能力,以便有助于ECCM 。自适应阵列天 线的实现与数字波束形成技术有着越来越紧密的联系[41]~[43]。 干扰对消与目标信号增强 早在20世纪70年代初期,自适应阵列天线原理就得到非常精确的数学描述[40]。最佳权矢量的表达式给出基本的结果。 *1?S M W -=μ (9.6) 式中,)(T *V V M E =是阵列天线所接收的V (噪声加干扰)的N 维协方差矩阵;S 是N 维矢量,它包含某个方向来的目标信号的采样。可以看出,式(9.6)和SLC 的方程式(9.3)之间的相似性。 相比于SLC ,自适应阵列天线技术有在消除杂波、箔条和干扰时增强目标信号的能力。自适应系统以最佳模式分配其自由度(即阵列的每个天线接收的脉冲串)以达到上述目的。 图9.3 自适应阵列方案 自适应阵列基本理论的推广包括:(1)目标模型S 未知,而不是在式(9.6)中假设已知的。(2)除空间滤波外,还采用了多普勒滤波来消除杂波和箔条。(3)雷达平台如在舰载或机载应用中是移动的。
第9章 电子反干扰(ECCM ) ·359· 式(9.6)的最佳滤波的检测概率为[40] )/1ln(2,(*1T FA D P Q P S M S -= (9.7) 式中,Q (·,·)是Marcum Q 函数,P F A 是预先设定的虚警概率。可以证明,式(9.6)中的权矢量提供最大的改善因子I f ,它由下式定义: 输入端信干功率比 输出端信干功率比=f I (9.8) 输入端信干功率比(SNR)I (相对于单个回波脉冲)在天线的输入端测量。对应于式(9.6)中最佳权矢量的I f 值为[40] I * 1T )SNR (S M S -=f I (9.9) I f 比SLC 所采用的对消比更能代表自适应阵列的性能。事实上,自适应阵列中在消除干扰的同时使有用信号得到积累。 自适应天线的实现仅局限于一些实验系统,为了便于用计算机进行矩阵求逆,转换它们只使用了有限的少数(大约为10个)天线 [44][45] 。具有大量接收单元的阵列需做某些形式处理上的简化。一种部分自适应的方法是使用子阵,自适应处理器的输入来自子阵。必须合理地选择子阵以避免栅瓣 [46][47] 。 全自适应阵列的其他简化形式有确定性空间滤波及仅用相位置零技术。前者降低干扰可能到来的方向或立体角的副瓣电平,例如零度仰角及相邻区域是干扰最有可能出现的位置,因为干扰机通常是地基的或者距离很远。权矢量可离线求得,通过假设一个已知协方差矩阵M 并存入存储器,那里有一权矢量“菜单”,供操纵员或自动判决系统使用[48]。因为把移相器作为波束控制系统的一部分已经实现,所以相位置零技术有吸引力。如果相同的移相器可以同时用于波束控制和自适应干扰置零,则昂贵的改型就不必要了。可是,相位置零合成带来分析和计算上的困难,当单元权矢量的幅度和相位都可随意变动时,就不存在上述问 题[49][50]。尽管如此,试验性的系统已获得成功 [51]~[53] 。 超分辨 普通天线的分辨力受限于众所周知的瑞利准则,即两个在角度上分开不小于0.8λ/L (以弧度计)的等幅噪声源才可以被分辨,其中λ 代表波长,L 是孔径长度。当入射波的信号-热噪声之比较大时,自适应阵列天线可获得一个极窄的自适应波束宽度来获得较好的方向估计。对于ECCM 来说,这是非常重要的, 因为可以获得非常精确的干扰机选通信号,同时有可能测量干扰源强度及得到无副瓣的空间谱方向图。对干扰机的角度估计可用来在干扰机方向形成波束,并作为自适应干扰抑制的辅助通道[54]。干扰方向也可用做确定波束置零,特别是主波束置零[55]。除干扰源方向及干扰源强度外,该技术还可以提供其他信息,如干扰源数目及它们之间的互相关性,这些信息可以用来跟踪及分类干扰源,以便更好地对其作出反应。 W. F. Gabriel 提出并分析了超分辨概念[56],他和其他后来学者描述了几种不同的方位估 计的方法[39][57]~[59]。其一是最大熵法(MEM )。该方法适用于除了信号所在方位外具有全方 位接收方向图的Howells-Applebaun 自适应波束形成器。接收方向图中的零点指出了信号的存在。因为零点总比天线波瓣尖锐,所以用自适应波瓣可以更精确地测定信号方位,这也就
多普勒天气雷达原理与业务应用试题 1、新一代天气雷达主要有哪三个部分组成? 答:雷达数据采集(RDA )、雷达产品生成(RPG )和主用户处理器(PUP )。 2、雷达数据采集(Radar Data Acquisition )简称RDA ,有哪几部分构成? 答:发射机、天线、接收机和信号处理器。 3、主用户处理器(Principal User Processor )简称PUP ,主要功能是什么? 答:获取、存储和显示产品。 4、新一代天气雷达第一级数据是由接收机输出的模拟数据,第二级数据是由信号处理器产生的最高时空精度的高分辨率数据,称为 基数据 ;第三级数据是由RPG 生成的数据,称为 产品数据 。 5、新一代天气雷达有哪4种常用体扫模式?强对流天气过程中最好使用何种扫描模式? 新一代天气雷达有VCP11、VCP21、VCP31、VCP32四种常用体扫模式。 强对流天气过程中最好使用VCP11体扫模式。 6、雷达气象方程为i i kdr t r r r h G P P 单位体积∑?=-σψπθφλ0 2.02 22210.)2(ln 1024,其中G 表示 天线增益 ,λ表示 雷达波长 , σ表示 粒子的后向散射截面 。 7、在瑞利散射条件下, 单位体积 单位体积 ∑∑= 62 4 5||i i D k λπσ,定义反射率因子单位体积 ∑= 6 i D Z ,则雷达气象方程可表示为C P r Z r 2= ,其中22 23||)2(ln 1024K h G P C t λθφ π=。在不满足瑞利散射条件下,雷达气象方程要表示为同一形式C P r Z r e 2=,则e Z 称为 等效反射率因子 。 8、反射率因子和回波功率的表示形式分别定义为 0 lg 10Z Z dBZ ?=(10=Z 3 6/m mm )和 min lg 10P P dB r ?=,将雷达气象方程 C P r Z r 2= 变换为
第16章机载动目标显示(AMTI)雷达 FRED M. STAUDAHER 16.1 采用AMTI技术的系统 机载搜索雷达最初是为远程侦察机探测舰艇研制的。第二次世界大战后期,美海军研制了几种机载预警(AEW)雷达,用来探测从舰艇雷达天线威力区之下飞近特遣舰队的低空飞机。在增大对空和对海面目标的最大检测距离方面,机载雷达的优点是显而易见的,只要了解下述情况就很清楚了,高度为100ft的天线桅杆,其雷达视线距离只有12n mile,而与其相比,飞机高度为10 000ft时,雷达视线距离则为123n mile。 神风突击队袭击造成多艘哨舰的损失引起了机载自主探测与控制站的设想,后来这种系统发展成为一种用于洲际防空的边界巡逻机。 E—2C航空母舰舰载飞机(如图16.1所示)使用机载预警雷达作为其机载战术数据系统中的主要传感器。这种雷达的视界很宽,用于检测海杂波和地杂波背景中的小飞机目标。由于其首要的任务是检测低空飞行的飞机,因此这种雷达就不能靠抬高天线波束的仰角来消除杂波。AMTI雷达系统就是在这种情况下发展起来的[1]~[3],与前一章中探讨的地面雷达的MTI 系统相似[1][4]~[6]。 图16.1 带有旋转天线罩的E—2C空中预警机 在截击机火炮控制系统中,AMTI雷达系统还可用来捕捉和跟踪目标。在这种场合中,雷达仅需抑制指定目标附近的杂波。因此,在目标所处的距离和角度扇形区内可将雷达优化到最佳状态。MTI系统也可以装在侦察机或战术歼击-轰炸机上用来检测地面运动的车辆。由于目标速度低,因而采用较高的雷达频率以获得大的多普勒频移。因为背景杂波通常很强,故这些雷达能够有效地采用非相参MTI技术。 高空、高机动、高速度的环境条件及尺寸、重量、功耗的限制给AMTI雷达设计者带来了一系列的特殊问题。本章将专门探讨机载条件下如何处理这些特殊问题。
任务书 雷达进行PD测速主要是利用了目标回波中携带的多普勒信息,在频域实现目标和杂波的分离,它可以把位于特定距离上、具有特定多普勒频移的目标回波检测出来,而把其他的杂波和干扰滤除。因此要求雷达必须具备很强的抑制杂波的能力,能在较强的杂波背景中分辨出运动目标的回波。 如今,不管是在军用还是民用上,雷达都在发挥着它很早重要的作用,与早期雷达采用距离微分方法测速相比,基于脉冲多普勒理论的雷达测速技术具有实时性好、精度高等优点。特别是现代相控阵技术在雷达领域的应用,实现了波束的无惯性扫描和工作方式的快速切换,更便于应用脉冲多普勒技术进行雷达测速。 本篇课程设计目的在于介绍脉冲多普勒雷达测速的原理,并对这种技术进行介绍和仿真。
摘要 脉冲多普勒(PD)雷达以其卓越的杂波抑制性能受到世人瞩目。现代飞行器性能的改进和导航手段的加强,使其能在低空和超低空飞行,因此防御低空入侵己成重要问题,由此要求机载雷达,包括预警机雷达和机载火控雷达具有下视能力,即要求能在强的地杂波背景中发现微弱的目标信号,所以现代的预警机雷达和机载火控雷达皆采用PD体制。脉冲多普勒雷达包含了连续波雷达和脉冲雷达两方面的优点,它具有较高的速度分辨能力,从而可以更有效地解决抑制极强的地杂波干扰问题;此外,脉冲多普勒雷达能够同时敏感地测定距离和速度信息;能够利用多普勒处理技术实现高分辨率的合成孔径图像;而且亦具有良好的抗消极干扰能力和抗积极干扰能力。 本文介绍了脉冲多普勒雷达测速的原理,信号处理。并用matlab简单的仿真了雷达系统对信号的处理. 关键词:脉冲多普勒雷达恒虚警脉冲压缩线性调频 Abstact Pulse Doppler (PD) radar is famous for it`s outsdanding clutter suppression.Modern aircraft`s function and GPS has been strengthen.now.it makes the aircraft can fly lower and lower.So.nowadays,Defensing.Low altitude invasion has been an important problem.so we require airborne radar. Early warning radar and airborne fire control radar have the ability to look down.That is to say.The radar is be required the ability to find Weak target signal in the strong Groung clutter.So .The modern airborne early warning radar and airborne fire control radar use the PD system.Pulse Doppler (PD) radar concludes two adervantages of Continuous wave radar and impulse radar.It has a higher velocity resolution.thus it can effectively.soveing the problem of strong ground clutter.what`s more.Pulse Dppler (PD) radar can Sensitive text the Distance and speed on the same time.Itcan use Doppler processing technology to realise Synthetic aperture images with high resolution. This article sinply introduced principle of pulse Doppler radar and signal
汽笛声变调的启示--多普勒雷达原理 1842年一天,奥地利数学家多普勒路过铁路交叉处,恰逢一列火车从他身 旁驰过,他发现火车由远而近时汽笛声变响,音调变尖(注:应为“汽笛声的音频频率变高”);而火车由近而远时汽笛声变弱,音调变低(应为“汽笛声的音频频率降低了”)。他对这种现象感到极大兴趣,并进行了研究。发现这是由于振源与观察者之间存在着相对运动,使观察者听到的声音频率不同于振源频率的缘故,称为频移现象。因为这是多普勒首先提出来的,所以称为多普勒效应。 由于缺少实验设备,多普勒当时没有用实验进行验证。几年后有人请一队小号手在平板车上演奏,再请训练有素的音乐家用耳朵来辨别音调的变化,验证了该效应。 为了理解这一现象,需要考察火车以恒定速度驶近时,汽笛发出的声波在传播过程中表现出的是声波波长缩短,好像波被“压缩”了。因此,在一定时间间隔内传播的波数就增加了,这就是观察者为什么会感受到声调变高的原因;相反,当火车驶向远方时,声波的波长变大,好像波被“拉伸”了。因此,汽笛声听起来就显得低沉。 用科学语言来说,就是在一个物体发出一个信号时,当这个物体和接收者之间有相对运动时,虽然物体发出的信号频率固定不变,但接收者所接收到的信号频率相对于物体发出的信号频率出现了差异。多普勒效应也可以用波在介质中传播的衰减理论解释,波在介质中传播,会出现频散现象,随距离增加,高频向低频移动。 多普勒效应不仅适用于声波,它也适用于所有类型的波,包括电磁波。 多普勒效应被发现以后,直到1930年左右,才开始应用于电磁波领域中。常见的一种应用是医生检查就诊人用的“彩超”,就是利用了声波的多普勒效应。简单地说,“彩超”就是高清晰度的黑白B超再加上彩色多普勒。超声振荡器产生一种高频的等幅超声信号,向人体心血管器官发射,当超声波束遇到运动的脏器和血管时,便产生多普勒效应,反射信号为换能器所接受,根据反射波与发射波的频率差可以求出血流速度,根据反射波的频率是增大还是减小判定血流方向。 20世纪40年代中期,也就是多普勒发现这种现象之后大约100年,人们才将多普勒效应应用于雷达上。多普勒雷达就是利用多普勒效应进行定位,测速,测距等的雷达。当雷达发射一固定频率的脉冲波对空扫描时,如遇到活动目标,回波的频率与发射波的频率出现频率差(称为多普勒频率),根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度;根据发射脉冲和接收的时间差,可以测出目标的距离。20世纪70年代以来,随着大规模集成电路和数字处理技术的发展,多普勒雷达广泛用于机载预警、导航、导弹制导、卫星跟踪、战场侦察、靶场测量、武器火控和气象探测等方面,成为重要的军事装备以及科学研究、业务应用装置。 多普勒天气雷达,是以多普勒效应为基础,当大气中云雨等目标物相对于雷达发射信号波有运动时,通过测定接收到的回波信号与发射信号之间的频率差异就能够解译出所需的信息。它与过去常规天气雷达仅仅接收云雨目标物对雷达发射电磁波的反射回波进了一大步。这种多普勒天气雷达的工作波长一般为5~10厘米,除了能起到常规天气雷达通过回波测定云雨目标物空间位置、强弱分布、垂直结构等作用,它的重大改进在于利用多普勒效应可以测定降水粒子的运
2012年7月江苏省高等教育自学考试27984自动检测技术 试题及答案 一、单项选择题(每小题1分,共20分) 1、在以下几种传感器当中 C 属于自发电型传感器。 A 、电容式 B 、电阻式 C 、压电式 D 、电感式 2、下列四个选项中,关于相对误差特征正确的是( B )。 A 大小与所取单位有关 B 量纲与被测量有关 C 不能反映误差的大小和方向 D 能反映测量工作的精细程度 3.可以认为是“负压”,所测的压力相当于真空度,此时绝对压力小于( D ) 。 A .51kPa B .61kPa C .81kPa D .l0lkPa 4.电子卡尺的分辨率可达0.01㎜,行程可达200㎜,它的内部所采用的电容传感器型式是(B )。 A .变极距式 B .变面积式 C .变介电常数式 5.用万用表交流电压档(频率上限仅为5kHz)测量频率高达500kHz 、10V 左右的高频电压,发现示值还不到2V ,该误差属于( D )。 A.系统误差 B.粗大误差 C.随机误差 D.动态误差 6.电涡流接近开关可以利用电涡流原理检测出___C___的靠近程度。 A. 人体 B. 水 C. 黑色金属零件 D. 塑料零件 7.机床床身探伤时,耦合剂应选__B____为宜。 A.自来水 B.机油 C.液体石蜡 D.化学浆糊 8.光栅传感器利用莫尔条纹来达到__A___。 A.提高光栅的分辨力 B.辩向的目的 C.使光敏元件能分辨主光栅移动时引起的光强变化 D.细分的目的 9.欲测量1Gs 左右的地磁场,应选择 C 传感器。 A .电感 B.磁致伸缩 C.磁阻 D.霍尔 10.测得某检测仪表的输入信号中,有用信号为20mV ,信噪比为-20dB ,则此时的干扰电压为_ C_。 A .10mV B .20mV C .100mV D .200mV 注 /20lg ()S N U S N dB U lg1=0 lg10=1 lg100=2 10.测得某检测仪表的输入信号中,干扰信号为200mV ,信噪比为-20dB ,则此时的有用信号为( D ) P258 A .1000mV B .200mV C .100mV D .20mV 信噪比为正,有用信号大于噪音;信噪比为负,有用信号小于噪音。 11.在房间中利用空气探头进行超声防盗时,超声波的频率多为_B _。 A. 20Hz~20kHz B. 35kHz~45kHz C. 0.5MHz~5MHz D. 100MHz~500MHz 12.正常人的体温为37℃,则对应的华氏温度为( D ). A .32F B .37F C .68.6F D .98.6F 13.金属或半导体薄片置于磁感应强度为B 的磁场中,磁场方向垂直于薄片,当有电流I 流过薄片时,在垂直于电流和磁场的方向上将产生电动势,这种现象称为( C ) 。 A .压电效应 B .电涡流效应 C .霍尔效应 D .集肤效应 14.调频(FM )收音机未收到电台时,喇叭发出烦人的“流水”噪声,这是B 造成的。 A.附近存在电磁场干扰 B .固有噪声干扰 C.机械振动干扰 D .空气中的水蒸气流动干扰 16.基于光生伏特效应制成的光电元件是( D )。 A .光电管 B .光敏晶闸管 C .光电倍增管 D .光电池 P191 17.电涡流接近开关可以利用电涡流原理检测出( C ) P100.2 A.人体靠近度 B.液体靠近度 C.黑色金属零件靠近度 D.塑料零件靠近度 18.单晶直探头发射超声波时,是利用压电晶片的( B )
第5章固态发射机 Michael T. Borkowski 5.1 引言 在逻辑电路和其他小功率电路,甚至在像电源和低于1MHz的能量转换器这样的大功率应用系统中,固态器件已广泛代替了真空器件。惟一的例外是阴极射线管(CRT),原因是它比等离子体显示器便宜得多。由于单个固态器件的输出功率是相当有限的,所以,在雷达发射机中,从高功率的速调管、行波管(TWT)、正交场放大管(CFA)和磁控管到固态器件的过渡是渐进的。然而,与真空管相比,固态器件有许多优点。 (1)不需要热阴极。因此,不存在预热延迟、灯丝功率浪费,且使用寿命几乎无限期。 (2)器件工作在低得多的电压环境下。因此,要求的电源电压是伏特级而不是千伏级,这样就避免了大空间、充油或密封的要求,从而,节省了电源的体积和重量,使电源和微波放大器获得较高的可靠性。 (3)用固态器件设计的发射机与真空管发射机相比,平均无故障时间(MTBF)得以提高。已经测过的放大模块的平均无故障时间大于100000 h。 (4)不需要脉冲调制器。用于雷达的固态微波器件通常采用C类工作方式,当射频驱动开和关时,它是自触发的。 (5)模块故障时,系统具有故障弱化功能。这是因为发射机的输出功率是由大量的固态器件合成提供的,而且当个别单元故障时,其他单元能很容易地重新组合以弱化故障。若以分贝表示,输出的总功率仅降低20lg r,其中r为工作的放大器与放大器总数之比。 (6)可获得很宽的带宽。一般高功率的微波真空管能获得10%~20%的带宽,而固态发射模块可获得50%或更大的带宽,并具有好的效率。 (7)在相控阵雷达应用中,可获得很好的灵活性。在相控阵雷达系统中,每个天线单元可以与单个有源收发组件相连接,这样就可消除通常存在于真空管系统中,位于点源管放大器与天线阵列表面之间的射频分配损耗。另外,用于波束控制的相位移动可在低电平上,在有源阵列单元的输入馈电端实现。这样就避免了辐射单元移相器高功率损耗,并提高了整机的效率。因输出功率是在空间合成的,从而任一点的峰值射频功率相当低。另外,输出幅度锥削可通过关断或减弱单个的有源放大器来实现。 高功率真空管被固态器件取代的进程比以前预想的要缓慢得多。事后分析,其原因是,在相同的峰值功率和占空比条件下,直接用固态器件取代脉冲工作的射频真空管过于昂贵且无法进行。与射频真空管相比,微波半导体器件的热时间常数短得多(是毫秒级,而不是秒级)。结果使平均功率为50W的微波晶体管在脉冲期间不过热的前提下,不能承受比100~200W更大的脉冲功率。具有窄脉冲宽度和低占空比的真空管式老雷达只能非常低效地利用微波晶体管的平均功率能力。例如,要取代L波段平均射频功率为500W、占空比
1 多普勒天气雷达主要由几个部分构成?每个部分的主要功能是什么? 答:主要由雷达数据采集子系统(RDA ),雷达产品生成子系统(RPG ),主用户终端子系统(PUP )三部分构成。RDA 的主要功能是:产生和发射射频脉冲,接收目标物对这些脉冲的散射能量,并通过数字化形成基本数据。RPG 的主要功能是:由宽带通讯线路从RDA 接收数字化的基本数据,对其进行处理和生成各种产品,并将产品通过窄带通讯线路传给用户,是控制整个雷达系统的指令中心。PUP 的主要功能是:获取、存储和显示产品,预报员主要通过这一界面获取所需要的雷达产品,并将它们以适当的形式显示在监视器上。 2 多普勒天气雷达的应用领域主要有哪些? 答:一、对龙卷、冰雹、雷雨大风、暴洪等多种强对流天气进行监测和预警;二、利用单部或多部雷达实现对某个区域或者全国的降水监测;三、进行较大范围的降水定量估测;四、获取降水和降水云体的风场信息,得到垂直风廓线;五、改善高分辨率数值预报模式的初值场。 3 我国新一代天气雷达主要采用的体扫模式有哪些? 答:主要有以下三个体扫模式:VCP11——规定5分钟内对14个具体仰角的扫描,主要对强对流天气进行监测;VCP21——规定6分钟内对9个具体仰角的扫描,主要对降水天气进行监测;VCP31/VCP32——规定10分钟内对5个具体仰角的扫描(使用长脉冲),主要对无降水的天气进行监测。 4 天气雷达有哪些固有的局限性? 答:一、波束中心的高度随距离的增加而增加;二、波束宽度随距离的增加而展宽;三、静锥区的存在。 5 给出雷达气象方程的表达式,并解释其中各项的意义。 答: P t 为雷达发射功率(峰值功率); G 为天线增益;h 为脉冲长度; 、 :天线在水平方向和垂直方向的波束宽度; r 为降水目标到雷达的距离; :波长; m :复折射指数; Z 雷达反射率因子。 6 给出反射率因子在瑞利散射条件下的理论表达式,并说明其意义。 答:∑= 单位体积6i D z ,反射率因子指在单位体积内所有粒子的直径的六次方的总和,与波长无关。 7 给出后向散射截面的定义式及其物理意义。 答: 定义:设有一个理想的散射体,其截面面积为?,它能全部接收射到其 上的电磁波能量,并全部均匀的向四周散射,若该理想散射体返回雷达天线处的电磁波能流密度,恰好等于同距离上实际散射体返回雷达天线的电磁波能流密度,则该理想散射体的截面面积?就称为实际散射体的后向散射截面。 物理意义:定量表示粒子后向散射能力的强弱,后向散射截面越大,粒子的后向散射能力越强,在同等条件下,它所产生的回波信号也越强。 8 什么是天气雷达工作频率?什么是天气雷达脉冲重复频率? 答:工作频率——天气雷达发射的探测脉冲的震荡频率 脉冲重复频率——每秒产生的触发脉冲的数目 9 什么是波束的有效照射深度和有效照射体积? 答:有效照射深度——雷达发出的探测脉冲具有一定的持续时间τ,在空间的电磁波列就有一定的长度h=τc ,在雷Z R C Z m m r h G p p t r ?=?+-=2 2222223212ln 1024λθ?πθ?λi S s R S 24πσ=
% ======================================================================= ====================% % 该程序完成16个脉冲信号的【脉压、动目标显示/动目标检测(MTI/MTD)】 % ======================================================================= ====================% % 程序中根据每个学生学号的末尾三位(依次为XYZ)来决定仿真参数,034 % 目标距离为[3000 8025 9000+(Y*10+Z)*200 8025],4个目标 % 目标速度为[50 0 (Y*10+X+Z)*6 100] % ======================================================================= ====================% close all; %关闭所有图形 clear all; %清除所有变量 clc; % ======================================================================= ============% % 雷达参数 % % ======================================================================= ============% C=3.0e8; %光速(m/s) RF=3.140e9/2; %雷达射频 1.57GHz Lambda=C/RF;%雷达工作波长 PulseNumber=16; %回波脉冲数 BandWidth=2.0e6; %发射信号带宽带宽B=1/τ,τ是脉冲宽度 TimeWidth=42.0e-6; %发射信号时宽 PRT=240e-6; % 雷达发射脉冲重复周期(s),240us对应1/2*240*300=36000米最大无模糊距离 PRF=1/PRT; Fs=2.0e6; %采样频率 NoisePower=-12;%(dB);%噪声功率(目标为0dB) % ---------------------------------------------------------------% SampleNumber=fix(Fs*PRT);%计算一个脉冲周期的采样点数480; TotalNumber=SampleNumber*PulseNumber;%总的采样点数480*16=; BlindNumber=fix(Fs*TimeWidth);%计算一个脉冲周期的盲区-遮挡样点数; %====================================================================== =============% % 目标参数 % %====================================================================== =============% TargetNumber=4;%目标个数 SigPower(1:TargetNumber)=[1 1 1 0.25];%目标功率,无量纲 TargetDistance(1:TargetNumber)=[3000 8025 15800 8025];%目标距离,单位m 距离参数为[3000 8025 9000+(Y*10+Z)*200 8025] DelayNumber(1:TargetNumber)=fix(Fs*2*TargetDistance(1:TargetNumber)/C); % 把目标距离换算成采样点(距离门) fix函数向0靠拢取整 TargetVelocity(1:TargetNumber)=[50 0 204 100];%目标径向速度单位m/s 速度参数为[50 0 (Y*10+X+Z)*6 100]
浏览次数:110次悬赏分:0|解决时间:2011-8-24 19:30|提问者:匿名 最佳答案 从开过来的机车所听到的声波间的距离被压缩了,就好像一个人正在关手风琴。这个动作的结果产生一个明显的较高的音调。当火车离去时,声波传播开来,就出现了较低的声音--这种现象被称为“多普勒”效应。 检查机动车速度的雷达测速仪也是利用这种多普勒效应。从测速仪里射出一束射线,射到汽车上再返回测速仪。测速仪里面的微型信息处理机把返回的波长与原波长进行比较。返回波长越紧密,前进的汽车速度也越快--那就证明驾驶员超速驾驶的可能性也越大。 多普勒测速仪仪器介绍 TSI的LDV/PDPA系统 LDV/PDPA的主要装置和原理 激光多普勒测速仪是测量通过激光探头的示踪粒子的多普勒信号,再根据速度与多普勒频率的关系得到速度。由于是激光测量,对于流场没有干扰,测速范围宽,而且由于多普勒频率与速度是线性关系,和该点的温度,压力没有关系,是目前世界上速度测量精度最高的仪器。 LDV/PDPA测速工作原理可以用干涉条纹来说明。当聚焦透镜把两束入射光以?角会聚后,由干激光束良好的相干性,在会聚点上形成明暗相间的干涉条纹,条纹间隔正比干光波波长,而反比干半交角的正弦值。当流体中的粒子从条纹区的方向经过时,会依次散射出光强随时间变化的一列散射光波,称为多普勒信号。这列光波强度变化的频率称为多普勒频移。经过条纹区粒子的速度愈高,多普勒频移就愈高。将垂直于条纹方向上的粒子速度,除以条纹间隔,考虑到流体的折射率就能得到多普勒频移与流体速度之间线性关系。LDV/PDPA系统就是利用速度与多谱勒频移的线性关系来确定速度的。各个方向上的多普勒频率的相位差和粒子的直径成正比,利用监测到的相位差可以来确定粒径。 LDV/PDPA系统从功能上分为:光路部分、信号处理部分。光路部分:采用He-Ni激光器或Ar离子激光器,是因为它们能够提供高功率的514.5nm,488nm,476.5nm三种波长的激光。带有频移装置的分光器将激光分成等强度的两束,经过单模保偏光纤和光纤耦合器,将激光送到激光发射探头,调整激光在光腰部分聚焦在同一点,以保证最小的测量体积,这一点就是测量体即光学探头。接受探头将接受到的多普勒信号送到光电倍增管转化为电信号以及处理并发大,再至多普勒信号分析仪分析处理后至计算机记录,配套系统软件可以进行数据处理工作。在流场中存在适当示踪粒子的倩况下,可同时测出流动的三个方向速度及粒子直径。 TSI公司在国际上第一个生产商业化的LDV/PDPA系统,现在的TSI公司的LDV/PDPA系统已经拥有4项专利设计,并且在流场、湍流、传质、传热、流型、燃烧研究上有广泛的使
第21章合成孔径(SAR)雷达 L.J.Cutrona 21.1 基本原理和早期历史 对于机载地形测绘雷达,一个日益迫切的问题是要求其具有更高的分辨力,并通过“强力”技术来达到高分辨力。通常这种类型的雷达系统是通过辐射短脉冲来获得距离分辨力,通过辐射窄波束来获得方位分辨力。 有关距离分辨力和脉冲压缩技术的一些问题已在第10章中讨论过了。在第10章中已经表明,若发射信号的带宽足够宽,则采用适当的技术可获得比相应脉宽要好得多的分辨力。由于脉冲压缩已在第10章中进行了广泛地讨论,因此本章将讨论直接应用于合成孔径技术中的脉冲压缩技术,特别是讨论对于同时完成脉冲压缩和方位压缩的技术,而不讨论顺序地完成距离压缩和方位压缩的技术。 本章所要讨论的基本原理是利用合成孔径技术来改善机载地形测绘雷达的方位分辨力,使其值比辐射波束宽度所能达到的方位分辨力要高得多。 SAR是采用信号处理的方法产生一个等效的长天线,而非真正采用物理的长天线。事实上,在绝大多数场合,使用的仅是一根较小的实际天线。 在考虑合成孔径时人们以长线性阵列物理天线的特性为参考。在阵列天线中,许多辐射单元沿直线配置在适当的位置上,并利用这种实际的线性阵列天线,使信号同时馈给天线阵的每个单元;同样地,当天线用于接收时,可使各个单元同时接收信号。在发射和接收工作模式下,用波导或其他传输线连接,利用干涉现象得到有效的辐射方向图。 若辐射单元相同,则线性阵列天线的辐射方向图是单个单元的方向图和阵列因子两个量的积。在线性阵列天线中,阵列因子比单元的方向图具有尖锐得多的波瓣(较窄波束),这种天线阵因子的半功率波束宽度β(rad)可由下式给出,即 β=(21.1) L/λ 式中,L为实际阵列天线的长度;λ为波长。 合成孔径天线往往仅用单个辐射单元。天线沿一直线依次在若干个位置平移,且在每一个位置发射一个信号,接收相应发射位置的雷达回波信号并储存起来。储存时,必须同时保存所接收信号的幅度和相位。 当辐射源移动一段距离L eff后,储存的信号和实际线性阵列天线的每一个单元所接收到的信号非常相似。因此,若对储存的信号采用与实际线性阵列天线相同的运算,就可获得长天线孔径的效应。这一概念将导致这种技术被称为合成孔径。 机载地形测绘雷达系统的天线通常被安装在侧视方向,而飞机的运动可将辐射单元送到天线阵的每一个位置。这些阵列位置就是实际天线在发射和接收雷达信号时的那些位置。