第4章 空间力系
4.1〖学习基本要求〗
本章介绍了空间汇交力系、空间力偶系、空间任意力系的简化与平衡问题。
1、在理解空间力在直角坐标系上的投影与分力的基础上,掌握空间汇交力系的简化结果及平衡方程;
2、在理解空间力矩和力偶的基础上,掌握空间力偶系的合成结果及平衡条件;
3、在理解空间问题中力的平移定理的基础上,掌握空间任意力系向一点的简化结果计算。
4、掌握空间任意力系的平衡方程,能解决比较简单的空间任意力系平衡问题。 4.2〖要点分析〗
1、空间汇交力系的合成
根据力的合成的平行四边形法则,空间汇交力系也一定可以合成为一个合力,合力作用点在汇交点,并且等于力系中各分力的矢量和,即
∑==+++=n
i i n 1
21R F F F F F (4.1)
合力在x 、y 、z 轴的投影为
??
?
???
?
=+???++==+???++==+???++=∑∑∑i n i n i n X Z Z Z Z Y Y Y Y Y X X X X X 212121 (4.2)
合力矢F R 的大小和方向的计算
∑∑∑++=++=2222
22)()()(i i i Rz Ry Rx R Z Y X F F F F (4.3)
R
R R F Z
F Y F X =
==
γβαcos ,cos ,cos (4.4) 2、空间汇交力系的平衡
空间汇交力系平衡的必要与充分条件为:该合力等于零,平衡方程通常可写成
∑∑∑===000i i i
Z Y X
, , (4.5)
【说明】①空间汇交力系的合成也可以用几何法,但画空间的力多边形很不方便,在
实用上均采用解析法。②解析法的基础是力在坐标轴上的投影。③投影轴可任意选取,只要三轴不共面且任何两根不平行。④空间汇交力系独立的平衡方程有三个,最多可求解三个未知量。⑤当空间汇交力系平衡时,它与任何平面上的投影力系也平衡。
3、空间力偶系的合成
任意个空间力偶可以合成为一个合力偶,合力偶矩矢等于各分力偶矩矢的矢量和。
∑==+++=n
i i n M M M M M 1
21 (4.6)
合力偶矩矢的大小和方向的计算
∑∑∑++=++=22222
2)()()(zi yi xi z y x M M M M M M M (4.7)
M
M
,M M ,M M z y x ===
'cos 'cos 'cos γβα (4.8) 4、空间力偶系的平衡
空间力偶系平衡的必要与充分条件是合力矩偶矢为零,平衡方程通常可写成
∑∑∑===000zi yi xi
M M M
, , (4.9)
【说明】①空间力偶系的平衡方程可以看作是力偶矩矢在轴上的投影的代数和,也可
以理解为各力偶矩矢对轴的投影的代数和。②空间汇交力系独立的平衡方程有三个,最多可求解三个未知量。③在理论上存在纯粹的力偶系,但在实际问题中却极少这样的情形。有的问题若按力偶系不易求解时,也可以把力偶系看作空间任意力系来处理。
5、空间任意力系的简化
空间任意力系向任一点简化的结果一般是一个力和一个力偶;该力作用于简化中心,其力矢等于力系的主矢,该力偶的力偶矩矢等于力系对于简化中心的主矩。
空间任意力系向一点的简化结果讨论:
⑴0,0'
==O R M F
,力系平衡; ⑵0,0'
≠=O R M F
,最后结果为一个合力偶,此时与简化中心无关; ⑶0,0'
=≠O R M F
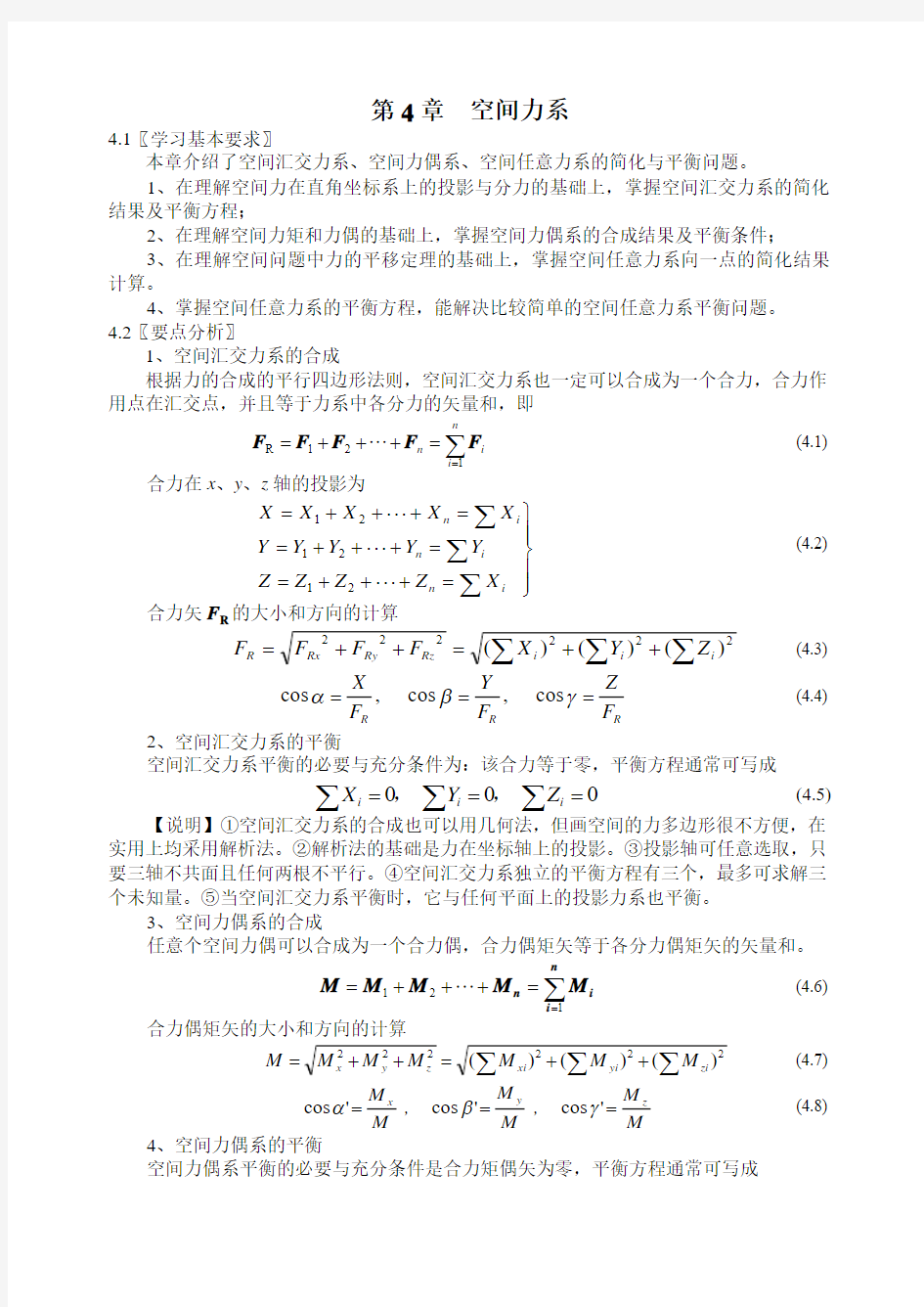
,过简化中心的一个合力; ⑷O R O R M F M F ⊥≠≠''
,0,0,一个合力,其作用线距简化中心为'
R O F M d =,如图4-1所示;
⑸O R O R M F M F
//,0,0'
'
≠≠,力螺旋,其中心过简化中心,如图4-2所示;
⑹角成、θO R O R M F M F '',0,0≠≠,力螺旋,中心距简化中心为'sin R
O F M d θ=,如
图4-3所示。
图
4-2
图
4-1
图4-3
【说明】①通常认为主矢不是力,主矩不是力偶。②一般该力不是原力系的合力,该力偶不是原力系的合力偶,只有把该力和该力偶共同作用才能与原力系等效。③主矢与简化中心无关,主矩一般与简化中心有关。④空间任意力系向一点的简化的最终结果有四种情况,平衡、合力偶、合力和力螺旋。
6、空间任意力系的平衡
空间任意力系平衡的必要与充分条件是:该力系的主矢和对任意点的主矩都为零。
00=='O R
, M F (4.10) 空间任意力系基本形式的平衡方程为
,Z ,Y ,X 000===∑∑∑
000===∑∑∑z
y
x
M
,
M
,
M
(4.11)
【说明】①除基本形式的平衡方程外,还可以有四力矩形式、五力矩形式和六力矩形式三组平衡方程,并且也有相应的限制条件,但是限制条件太多,一般书中均未列出,对于初学者来讲,也不常遇到这样的情况,可不必掌握。②空间任意力系独立的平衡方程只有六个,最多可以求解六个未知量。③如果把其它力系都看作是空间任意力系的特殊情况,则其独立的平衡方程数要作相应的减少。 4.3〖范例解答〗
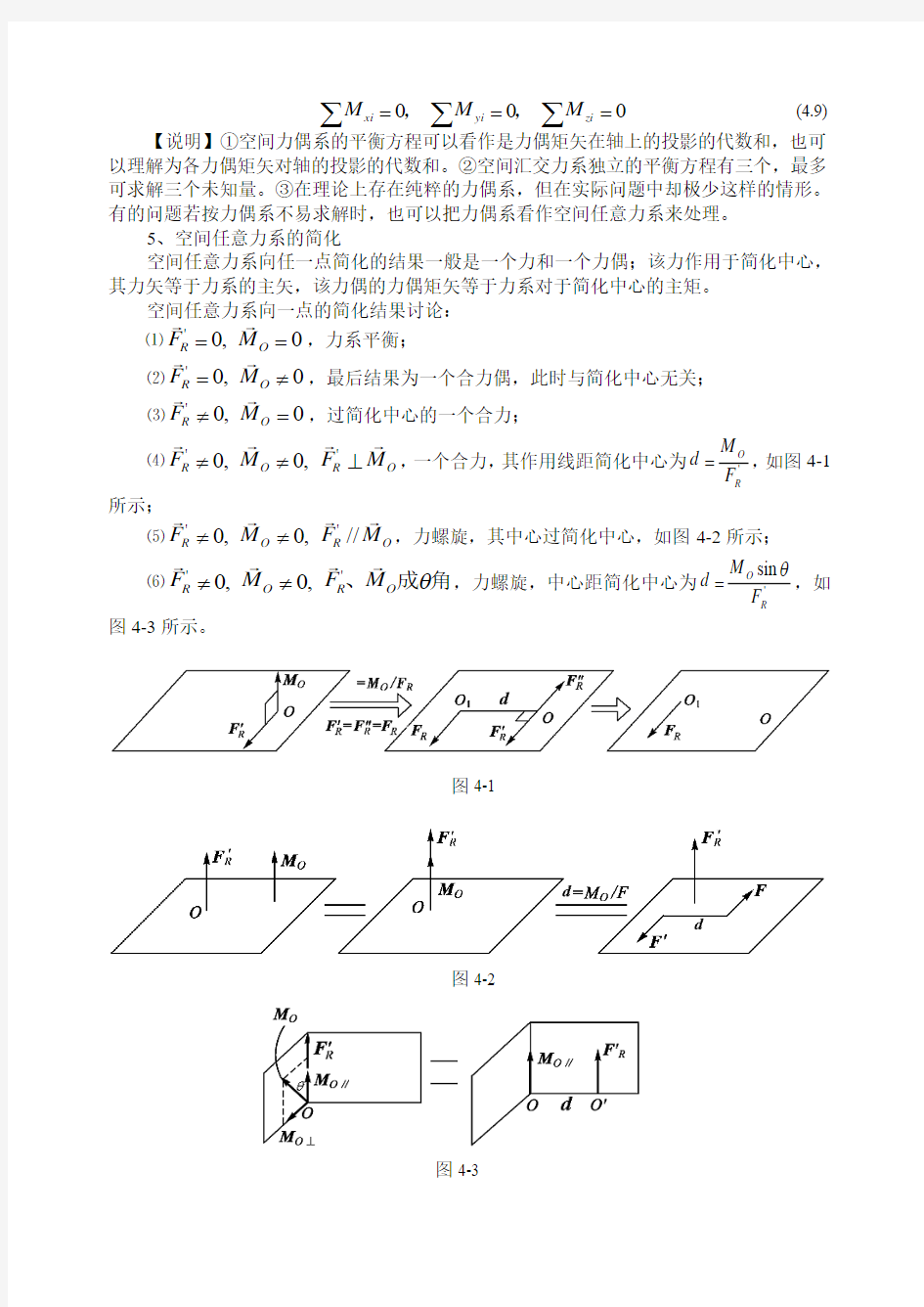
例4-1如图4-4(a)所示,有一空间支架固定在相互垂直的墙上。支架由垂直于两墙的铰接二力杆OA 、OB 和钢绳OC 组成。已知θ = 30°,φ=60°,O 点吊一重量G =1.2 kN 的重物。试求两杆和钢绳所受的力。图中O 、A 、B 、D 四点都在同一水平面上,杆和绳的重量都忽略不计。
【解】 1)选研究对象,画受力图。取铰链O 为研究对象,设
坐标系为Dxyz ,受力如图4-4(b)所示。
2)列平衡方程式,求未知量,即 ∑X i = 0, F B – F cos θ sin φ = 0 ∑Y i = 0, F A – F cos θ cos φ = 0
∑Z i = 0, F sin θ–G = 0 解上述方程得
kN 4.230sin 2.1sin =?==θG F
F A = F cos θ cos φ = 2.4 cos30o c os60o=1.04 kN
F B = F cos θ sin φ = 2.4 cos30os i n60° =1.8 kN
例4-2如图4-5(a)所示,空间构架由三根无重直杆组成,在D 端用球铰链连接,如图所示。A 、B 和C 端则用球铰链固定在水平地板上。如果挂在D 端的物P 重10 kN ,试求铰链A 、B 和C 的反力。
【解】取节点D 为研究对象,假设各杆都为拉力、受力如图4-5(b)。平衡方程为: 0=∑i X ,045cos 45cos =?-?A B F F
(a) (b) 图4-4
(a) (b) 图4-5
0=∑i Y ,015cos 30cos 45sin 30cos 45sin =?-??-??-C B A F F F
0=∑i Z ,015sin 30sin 45sin 30sin 45sin =-?-??-??-F F F F C B A
把F=10 kN 代入以上三式解出:kN 4.26-==B A F F (压),kN 5.33=C F (拉)。 例4-3图4-6(a)所示的三角柱刚体是正方体的一半。在其中三个侧面各自作用着一个力偶。已知力偶(F 1,F'1)的矩M 1=20 N·m ;力偶(F 2,F'2)的矩M 2=20 N·m ;力偶(F 3,F'3)的矩M 3=20 N·m 。试求合力偶矩矢M 。 【解】1)画出各力偶矩矢,如图4-6(b)所示。
2)计算合力偶矩矢M 的投影。 0321=++=x x x x M M M M
m N 86.5321?-=++=y y y y M M M M
m N 14.34321?=++=z z z z M M M M
3)计算合力偶矩矢M 的大小和方向。
m N 64.3422
2?=++=z y x M M M M
0cos ='α,169.0cos -='β,986.0cos ='γ。
例4-4图4-7(a)所示支架由三根互相垂直杆刚结而成,两圆盘直径均为d ,分别固定于两水平杆杆端上,盘面与杆垂直。竖直杆AB 长为l ,在图示载荷下试确定轴承A ,B 的约束力。 【解】研究整体,主动力是两个力偶矩大小为的力偶,A ,B 两处约束力必构成一力偶与主动合力偶相平衡。由力偶矢三角形,如图4-7(b)所示,约束力偶矩M AB 的大小为M =Fd ,所以
AB M
=AB A B M F F l l ===
例4-5图4-8所示力系的三力分别为F 1=350kN ,F 2=400kN ,F 3=600kN ,其作用线的位置如图所示。试将此力系向原点O 简化。
图4-6
(a) (b)
(a) (b)
图4-7
1150150R F F i j k =++【解】由题意得
N 14421
60018100
60350-=?-?
==∑i X X
N 101023
6002240018100
80350=?+?+?
==∑i Y Y
N 5172240018100
90350-=?--?
==∑i Z Z
主矢 N )5171011144(R k j i F -+-='。
m N 4812.022
40006.018100
90350?-=??-??
-=x M m N 07.2109.01810090
350?=??=y M
m N 4.1906.021
60009.0236006018100
6035009.01810080350?-=??+??-??-??=z M
主矩 m N )4.191.2148(?-+-=k j i M O 。 例4-6如图4-9所示,长方体沿三个不相交又不平行的棱作用三力 F 1、F 2、F 3,棱长为a 、b 、c 。若F 1=F 2=F 3=F ,如何选择棱长,简化为一个力。
【解】建立图示坐标向O 点简化: ΣX i =F ,ΣY i =F ,ΣZ i =F ,
ΣM x =Fa-Fc ,ΣM y = -Fb ,ΣM z =0
令F R ?M O =0,即F (Fa-Fc )+ F (-Fb )=0
所以当a-c-b=0时,可以简化为一个力。
例4-7沿图4-10所示长方体棱边作用的三力F 1、F 2、F 3等效于过O 点的一个力螺旋。已知F 2=F 3=150kN ,求F 1,a 及力螺旋中力偶矩大小。 【解】向O 简化
例4-8三轮小车自重W =8kN ,作用于点C ,荷载F =10kN ,作用于点E ,如图4-11所示。求小车静止时地面对车轮的反力。
【解】1)选小车为研究对象,画受力图如图4-11所示。其中W 和F 为主动力,F A 、F B 、F D 为地面的约束反力,此五个力相互平行,组成空间平行力系。
图4-9
11600(3600)o F F a M i j k =+?-+ R o //F M 1113600600 150150
F F a
F -∴==2
11 3600900000
F F ∴--=11 100300
F 或F ∴=-= 1(m) 而 600300300o 故a M i j k ==+
+o M
=图
4-10
图4-8
2)取坐标轴如图所示,列出平衡方程求解 ∑Z i = 0, –F –W + F A + F B + F D = 0 ∑M x (F )= 0, –0.2×F –1.2×W + 2×F D = 0 ∑M y (F )= 0,0.8×F +0.6×W – 0.6×F D –1.2×F B = 0 得 F D = 5.8 kN ,F B = 7.78 kN ,F A = 4.42 kN
例4-9传动轴如图4-12所示,以A 、B 两轴承支承。圆柱直齿轮的节圆直径d = 17.3 mm ,压力角α=20°,在法兰盘上作用一力偶,其力偶矩M =1030 N·m 。如轮轴自重和摩擦不计,求传动轴匀速转动时A 、B 两轴承的反力及齿轮所受的啮合力F 。
【解】1)取整个轴为研究对象。设A 、B 两轴承的反力分别为F A x 、F A z 、F B x 、F B z ,并沿x 、z 轴的正向,此外还有力偶M 和齿轮所受的啮合力F ,这些力构成空间一般力系。
2)取坐标轴如图所示,列平衡方程
∑∑∑∑∑=?++==?-+==??+?-==?+??==??+-=0
20sin ,0020cos ,00 22020cos 332 ,0)(0 332 22020sin ,0)(0220cos ,0)(B A B A B B F F F Z F F F X F F M F F M d F M M z
z
i
x
x
i
x
z
z
x y F F F 解得F = 12.67 kN ,F B z = –2.87 kN ,F B x = 7.89 kN ,F A x = 4.02 kN ,F A z = –1.46 kN
例4-10图4-13(a)所示悬臂刚架ABC 上作用有分布荷载q =1kN/m ,F P =3kN ,F Q =4kN 及力偶矩m =2kN·m ,刚尺寸如图。求固定端A 处的约束反力及力偶矩。
图
4-12 图
4-11 图
4-13
(a) (b)
【解】画受力图,建立坐标系,如图4-13(b)所示,列平衡方程得
00=+=∑P Ax i F F ,X
00=+=∑Q
Ay
i
F F ,Y 020=-=∑q F ,Z Az
i
01230=?--=∑q F M ,M Q
x x 060=++=∑m F M ,M P
y y 040=-=∑P
z z F M ,M
解得kN,2,kN 4,kN 3=-=-=Az Ay Ax F F F
,m kN 11?=x M ,m kN 38?-=y M m kN 12?=z M 。
4.4〖练习题〗
4-1判断题:试判断下列说法是否正确,正确的划“√”,错误的划“×”并请说明理由。
1)一个空间力系向某点简化后,得主矢和主矩都不为零,且互相平行,则此力系可进一步简化为一合力。
2)某一力偶系,若其力偶矩矢构成的多边形是封闭的,则该力偶系向一点简化时,主矢一定等于零,主矩也一定等于零。
3)某空间力系由两个力构成,此二力既不平行,又不相交,则该力系简化的最后结果必为力螺旋。
4)一个平衡的空间力系,若各力作用线平行某一固定平面,则其独立的平衡方程最多有3个。
5)某空间力系在任意轴上的投影都等于零,则该力系一定是平衡力系。
6)空间汇交力系在任选的三个投影轴上的投影的代数和分别等于零,则该汇交力系一定成平衡。
7)某空间力系满足条件:ΣY =0,ΣZ =0,ΣM x =0,ΣM y =0该力系简化的最后结果可能是力、力偶或平衡。
8)一空间力系,若各力作用线与某一固定直线相交,则独立的平衡方程最多有5个。 9)一个空间力系向某点简化后,得主矢和主矩都不为零,且互相正交,则此力系可进一步简化为一合力。
10)一空间力系若对不共线的任意三点的主矩均等于零,则该力系平衡。 4-2选择题
1)边长为a 的立方框架上,沿对角线AB 作用一力F 1,其大小为F ;沿CD 边作用另一力F 2,其大小为3F /3,此力系向O 点简化的主矩大小为 。
① 6Fa ;② 3Fa ;③ 6Fa /6;④ 3Fa /3。
题4-2图(2)
题4-2图(1)
2)图示空间平行力系,设力线平行于z 轴,则此力系的相互独立的平衡方程为 。
① ΣM x =0,ΣM y =0和ΣM z =0; ② ΣX =0,ΣY =0和ΣM x =0; ③ ΣZ =0,ΣM x =0和ΣM y =0。
3)一空间力系,若主矢和主矩均不为零,且即不平行,亦不垂直,则其简化的最后结果为______________。
①合力 ②力偶 ③力螺旋 ④平衡 4)所谓“力螺旋”指的是_________________。
①力系主矢垂直主矩且均不为零时,力与力偶之总称。 ②力系主矢垂直主矩时,力与力偶之总称。 ③力系主矢平行主矩时,力与力偶之总称。 ④力系主矢等于零时的力偶。 5)正方体的一个顶角上作用着六个大小相等的力,此力系向任意一点简化结果为___。 ①主矢等于零,主矩不等于零。 ②主矢等于零,主矩也等于零。 ③主矢不等于零,主矩也不等于零。 ④主矢不等于零,主矩等于零。 ⑤条件不足,无法判断。
6)任一空间力系,若其主矢不等于零,则其简化的最后结果为______________。 ①一个力 ②一个力偶 ③力螺旋 ④力或力螺旋 ⑤力偶或力螺旋
4-3图示空间桁架由六杆1、2、3、4、5和6构成。在节点A 上作用一力F ,此力在矩形ABDC 平面内,且与铅直线成45°角。FBM EAK ?=?。等腰三角形EAK 、FBM 和NDB 在顶点A 、B 和D 处均为直角,又EC=CK=FD=DM 。若F =10 kN ,求各杆的内力。
4-4在图示起重机中,已知:AB =BC =AD =AE ,点A 、B 、D 和E 均为球铰链连接,如三角形ABC 的投影为AF 线,AF 与y 轴的夹角为α。求铅直支柱和各斜杆的内力。 4-5在图示工件上同时钻四个孔,每孔所受的切削力偶矩均为8N·m ,每孔的轴线垂直于相应的平面。求这四个力偶的合力偶。
4-6 图示三圆盘A 、B 和C 的半径分别为150 mm 、100 mm 和50 mm 。三轴OA 、OB 和OC 在同一平面内,AOB ∠为直角。在这三圆盘上分别作用力偶,组成各力偶的力作用在轮缘上,它们的大小分别等于10 N 、20 N 和F 。如这三圆盘所构成的物系是自由的,不计物系重量,求能使此物系平衡的力F 的大小和角α。
4-7图示力系F 1 = 25kN ,F 2 = 35kN ,F 3 = 20kN ,力偶矩m = 50kN·m 。各力作用点坐标如图。试计算:1)力系向O 点简化的结果;2)力系的合力。
题4-3图
题4-4图
4-8图示荷载F P =1002N , F Q =2002N ,分别作用在正方形的顶点A 和B 处。试将此力系向O 点简化,并求其简化的最后结果。
4-9图示三力F 1、 F 2和 F 3的大小均等于F ,作用在正方体的棱边上,边长为a 。求力系简化的最后结果。
4-10如图所示,均质长方形薄板重P =200 N ,用球铰链A 和蝶铰链B 固定在墙上,并用绳子CE 维持在水平位置。求绳子的拉力和支座反力。
4-11无重曲杆ABCD 有两个直角,且平面ABC 与平面BCD 垂直。杆的D 端为球铰支座,另一A 端受轴承支持,如图所示。在曲杆的AB 、BC 和CD 上作用三个力偶,力偶所在平面分别垂直于AB 、BC 和CD 三线段。已知力偶矩M 2和M 3,求使曲杆处于平衡的力偶矩M 1和支座反力。
4-12 杆系由球铰连接,位于正方体的边和对角线上,如图所示。在节点D 沿对角线LD 方向作用力F D 。在节点C 沿CH 边铅直向下作用F 。如球铰B 、L 和H 是固定的,杆重不计,求各杆的内力。
4-13如图所示,水平轴上装有两个凸轮,凸轮上分别作用已知力F 1=800N 和未知力F 。如
题4-5图
题4-6图
题4-7图 题4-8图 题4-9图
题4-10图 题4-11图
题4-12图
题4-13图
轴平衡,求力F 和轴承约束力的大小。
4-14扒杆如图所示,立柱 AB 用 BG 和 BH 两根缆风绳拉住,并在 A 点用球铰约束,A 、H 、G 三点位于Oxy 平面内,G 、H 两点的位置对称于y 轴,臂杆的D 端吊悬的重物重W = 20 kN ;求两绳的拉力和支座A 的约束反力。
4-15如图所示作用在踏板上的铅垂力F 1使得位于铅垂位置的连杆上产生的拉力F = 400 N ,o
30α=,a = 60 mm ,b = 100 mm ,c = 120 mm 。求轴承A 、B 处的约束力和主动力F 1。
4.5〖练习题参考答案〗 1-1判断题:
1)×。理由:力系简化结果为力螺旋。 2)√ 3)√ 4)×。理由:独立的平衡方程最多有5个。 5)×。理由:有可能简化为一个力偶。 6)×。理由:三个投影轴中不能有两个平行。 7)√ 8)√ 9)√ 10)×。理由:不能保证力系的主矢一定等于零。 4-2选择题:
1)④ 2)③ 3)③ 4)③ 5)⑤ 6)④
4-3【解】1)取节点A 为研究对象,受力图及坐标如题4-3图(b)所示,列平衡方程得 0=∑i X ,045cos )(21=?-F F
0=∑i Y ,045sin 3=?+F F
0=∑i Z ,045cos 45sin )(21=?-?+-F F F
解出:kN 52
21-=-==F
F F ,kN 07.73-=F
2)取节点B 为研究对象,受力如题4-3图(c)所示,列平衡方程得
0=∑i X ,045cos )(54=?-F F
0=∑i Y ,045sin 36=-?F F
题4-3图(b) 题4-3图(c)
题4-14图
题4-15图
0=∑i Z ,045sin )(654=?++-F F F
解出:kN 554==F F (拉力),kN 106-=F (压力)
4-4【解】1)取节点C 为研究对象,受力如题4-3图(b)所示,其中x 轴沿BC 方向,y 轴铅直向上,列平衡方程求解。
0=∑i Y ,045sin =-?-P F CA ,P F CA 2-=
0=∑i X ,045cos =?--CA CB F F ,P F CB =
2)取节点B 为研究对象,受力如题4-3图(c)(d)所示,列平衡方程求解。 0=∑i X ,0sin 45sin 45cos )(=+??-αBC BE BD F F F
0=∑i Y ,0cos 45cos )(2=-?+-αBC BE BD F F F
0=∑i Z ,045sin )(=?+--BE CA BA F F F
解得αααααcos 2,)sin (cos ,)sin (cos P F P F P F BE BD BE -=+=+=
4-5【解】
4321M M M M M +++=k j i )5
3()54(43241M M M M M +--+-=m N 8.1284.14?---=k j i
4-6【解】画出三个力偶的力偶矩矢三角形如题4-6图(b)所示,有
mm N 5000400030002222?=+=+=
B A
C M M M
F M C 100=,
N 50100
==C M F
4
3
t a n ==B A M M β,'523687.36?=?=β 4-7【解】1)向O 点简化
kN 10'R k F F =∑=i
)(F M M O O ∑=
题4-4图
(b)
题4-4图
(c)
题4-4图(d) 题4-5图
(b)
题4-6图
(b)
m
kN )10580(20
0 00 2 3- 35- 0 00 2 2 25
0 00 2- 3 50?+-=+++=j i k
j i k j i k j i j
2)合力kN 10R k F =
设合力作用线过点)0,,(y x ,则 j i M k
j i 1058010
0 00 +-==O x y 5.10-=x ,0.8-=y ,0=z
合力作用线过点(-10.5,-8.0,0)。
4-8【解】N )(100P k i F +-=,N )(200Q k j i F +--=
m
N )300200(200
200- 2000
1 1 100
0 1000 0 1 )(?-=-+-=j i k j i k
j i F O M
N )300200300('R k j i F F +--=∑=i
Q P F F F r M ?+?=B A O
合力 N )300200300('
R R k j i F F +--== 设合力过点(0,,y x ),则
j i M k j i 300200300
200- 3000
-==-O y x ,得 1=x ,3
2
=y ,0=z 即合力作用线过点(0,3
2
,1)。 4-9【解】先向O 点简化,得k F F ='
R , k j M Fa Fa O +=。因0'R ≠?O M F ,故最后简
化结果为一力螺旋。
该力螺旋k F F ='
R ,k M Fa =,设力螺旋中心轴过)0,,(y x O ',则
j M F r Fa O ==?'1R
即
j k
j i Fa F
y x = 0 00 ,得 a x -=,0=y ,0=z 所以合成最后结果的力螺旋中心轴上一点坐标为(0,0,a -)。
4-10【解】取薄板为研究对象,受力如题4-10图(b)所示,尽量采用力矩式求解。 0=∑z M ,0=?-AB F Bx ,0=Bx F 0=∑AC M ,030sin =??AB F Bz ,0=Bz F
题4-7图(b)
0=∑y M ,02
30sin =?+??-BC
P BC F ,N 200==P F 0=∑BC M ,02=?-?AB F AB P Az ,N 1002
==P
F Az
0=∑i X ,030sin 30cos =??-F F Ax ,N 6.86=Ax F
0=∑i Y ,030sin 30cos =??-F F Ax ,N 150=Ay
F
4-11【解】取曲杆为研究对象,受力如题4-11图(b)所示,平衡方程为: 0=∑i X ,0=Dx F (1) 0=∑i Y ,0=+Dy Ay F F
(2) 0=∑i Z ,0=+Dz Az F F (3) 0=∑x M ,01=?-?-b F c F M Az Ay
(4) 0=∑y M ,02=-?M a F Az (5) 0=∑z M ,03=?-a F M Ay
(6)
由式(5)、(6)解出:a M F Az 2
=
,a M F Ay 3= 代入式(2)、(3),得:a M F Dy 3-=,a
M
F Dz 2-=
再代入式(4),得:231M a
b
M a c M +=,
即 0321=--cM bM aM
(7)
从图上看,在直角系中,)(321k j i M M M M +-=,)(k j i DA c b a +--= 式(7)表示,0=?-DA M ,即DA M ⊥,M 只有满足此式才能使曲杆达到平衡。若M
有平行DA 的分量,则曲杆可绕DA 轴线加速转动,当转过一小角度后,A 端反力将要复杂化、不能再作向心轴承看待。
4-12【解】1)取节点D 为研究对象,受力如题4-12图(b)所示,平衡方程为: 0=∑i Y ,02
1211=?-?
F F D , D F F =1 题4-10图
(b) 题4-11图(b)
0=∑i Z ,02
1216=?-?
F F D , D F F =6 0=∑i X ,02
1
)(613=++F F F ,D F F 23-=
2)取节点C 为研究对象,平衡方程为
0=∑i X ,031
43=?
--F F ,D F F 64-= 0=∑i Y ,031
42=?--F F ,D F F 22-=
0=∑i Z ,03
1
45=?---F F F ,D F F F 25--=
4-13【解】10,0Ax Bx X F F F =++=∑
0,0Az
Bz
Z F F F =++=∑
1
0,1401000z
Bx
M F F =--=∑ 1
0,20200y M F F =-=∑ 0,401000x Bz
M F F =+=∑
320N,480N Ax Az F F ==-,1120N,320N Bx Bz F F =-=-,800N F =
4-14【解】G 、H 两点的位置对称于y 轴,BG BH F F =。
0,sin 45cos 60sin 45cos 600BG
BH
Ax
X F F F =-++=∑
0,cos 45cos60cos 45cos600BG BH Ay
Y F F F =--+=∑
0,sin 60sin 600Az BG BH Z F F F W =---=∑
0,5sin 45cos 605sin 45cos 6050x BG BH
M F F W =+-=∑
28.28kN,0,20kN,68.99kN BG BH Ax Ay Az F F F F F =====
4-15【解】
0,0By
Ay Y F
F =+=∑
1
0,0Az
Bz
Z F F F F =+--=∑ 1
0,2cos 0x M bF cF α=-=∑ 0,0y
Bz
Az
M aF bF bF =-+=∑ 0,0z By Ay
M bF bF =-=∑
0Ay By F F ==,423.92N Az F =, 183.92N Bz F =,1207.84N F =
题4-12图(b)
第五章 空间任意力系 习 题 5.1 托架A 套在转轴z 上,在点C 作用一力F = 2000 N 。图中点C 在Oxy 平面内,尺寸如图所示,试求力F 对x ,y ,z 轴之矩。 题5.1图 解:cos 45sin 60 1.22x F F KN == cos45cos600.7y F F KN == sin 45 1.4z F F KN == 6084.85x z M F mm KN mm ==? 5070.71y z M F mm KN mm ==? 6050108.84z x y M F mm F mm KN mm =+=? 5.2 正方体的边长为a ,在其顶角A 和B 处分别作用着力F 1和F 2,如图所示。求此两力在轴x ,y ,z 上的投影和对轴x ,y ,z 的矩。 x y z O a a a A B F 1 F 2 α βα题5.2图 F F z F xy F y F x
解:21sin cos sin x F F F αβα=- 1cos cos y F F βα=- 12sin cos z F F F βα=+ 12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 5.3 如图所示正方体的表面ABFE 内作用一力偶,其矩M = 50 kN·m ,转向如图。又沿GA 、BH 作用两力F 、F ′,F = F ′,a = 1 m 。试求该力系向C 点的简化结果。 解:两力F 、F ′能形成力矩 1M 1M Fa m ==? 11cos 45x M M = 10y M = 11sin 45z M M = 1cos 4550x M M KN m ==? 11sin 4550100z z M M M M KN m =+=+=? C M m ==?
第五章 空间任意力系 5.1解:cos 45sin 60 1.22x F F K N == c o s 45c o s 60 0.7 y F F K N == sin 45 1.4z F F K N == 6084.85x z M F m m K N m m ==? 5070.71y z M F m m K N m m ==? 6050108.84z x y M F m m F m m K N m m =+=? 5.2 解:21sin cos sin x F F F αβα=- 1c o s c o s y F F βα=- 12sin cos z F F F βα=+12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 5.3解:两力F 、F ′能形成力矩1M 1M Fa m ==? 11cos 45x M M = 10y M = 11sin 45z M M = 1c o s 4550x M M K N m == ? 11sin 4550100z z M M M M K N m =+=+=? C M m ==?63.4α= 90β= 26.56γ= 5.4 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N·m ,M 2 = 2 N·m ,求力系向O 点简化所得的主矢'R F 和主矩M O 。 题5.4图 解:' 1236R F F F F N =+-=
第四章 空间力系 一、要求 1、能熟练地计算力在空间直角坐标轴上的投影和力对轴之矩。 2、对空间力偶的性质及其作用效应要有清晰的理解。 3、了解空间力系向一点简化的方法和结果。 4、能应用平衡条件求解空间汇交力系、空间任意力系、空间平行力 系的平衡问题。 5、能正确地画出各种常见空间约束的约束反力。 二、重点、难点 本章重点:力在空间直角坐标轴上的投影和力对轴之矩。空间汇交力系、空间任意力系、空间平行力系的平衡方程的应用。各种常见的空间约束及约束反力。b5E2RGbCAP 2、本章难点:空间矢量的运算,空间结构的几何关系与立体图。 三、学习指导 1、空间力系的基本问题及其研究方法 空间力系研究的基本问题仍然是静力学的三个基本问题,即:物体的受力分析、力系的等效替换和力系的平衡条件。空间力系是力系中最普遍的情形,其它各种力系都是它的特殊情形。按由浅入深、由特殊到一般的认识规律研究空间力系,是从理论上对静力学作一个系统而完整的总结。p1EanqFDPw 与平面力系的研究方法相似,这里也采用力向一点平移的方法将空间任意力系分解为空间汇交力系和空间力偶系,再应用这两个力系
的合成方法来简化原力系,然后根据简化结果推导出平衡条件。由于空间力系各力作用线分布在空间,因而使问题复杂化。出现了力在坐标轴上的二次投影法、力对轴的矩以及用向量表示力对点的矩和力偶矩等新问题,简化的结果和平衡方程也复杂了。DXDiTa9E3d 2、各类力系的平衡方程 各类力系的独立的平衡方程的数目不变。但是平衡方程的形式可以改变。上表列出的是一般用形式。 解题指导
对于解力在直角坐标轴上投影或力沿直角坐标轴分解这类问题,重要的是确定力在空间的位置。一般解题的思路如下:RTCrpUDGiT 认清题意,仔细查看结构<或机构)的立体图,它由哪些部 件组成,各部件在空间的位置,以及它们和坐标轴的关系。 5PCzVD7HxA 认清力的作用线在结构<或机构)的哪个平面内,寻找它与 坐标面的交角,然后找力与坐标平面的夹角及力与坐标轴的 夹角。jLBHrnAILg (3)考虑用一次投影或二次投影的方法求解。 2、计算力对轴之矩,一般令矩轴位于一个坐标面内,寻找与矩轴垂直 的平面,然后按题意选择以下两种方法: 将力投影到垂直于轴的平面上,然后按平面上力对点的矩计 算。怎样将力投影到平面上呢?可先由力的作用点向平面作 垂线,再寻找力和垂线所在平面与该平面的交线,然后将力 向交线投影。xHAQX74J0X 将力沿直角坐标轴分解,然后根据合力之矩定理计算。怎样 选择分解方向呢?一般让两个分力在与矩轴垂直的平面内, 一个分力平行于矩轴。LDAYtRyKfE 3、空间力系的解题技巧有以下两点: 平衡力系在任意轴上的投影等于零,在选择三个投影轴时, 可不相交,可不相互垂直,但三轴不能共面,任意二轴也不 能平行。如果所选投影轴垂直于未知力或它所在的平面,则 可减少平衡方程中未知力的数量,便于求解方程。 Zzz6ZB2Ltk 平衡力系对任意轴的力矩都必须等于零,在选择三个力矩轴 时,可不相交。可不相互垂直。另外,用力矩方程也能保证 合力为零,可用力矩方程代替投影方程。因此,空间力系的 平衡方程可以有四矩式、五矩式、六矩式。如果所选取的矩
第五章 空间任意力系 解:cos 45sin 60 1.22x F F KN ==o o cos45cos600.7y F F KN ==o o sin 45 1.4z F F KN ==o 6084.85x z M F mm KN mm ==? 5070.71y z M F mm KN mm ==? 6050108.84z x y M F mm F mm KN mm =+=? 解:21sin cos sin x F F F αβα=- 1cos cos y F F βα=- 12sin cos z F F F βα=+12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 解:两力F 、F ′能形成力矩1M 1502M Fa KN m ==? 11cos 45x M M =o 10y M = 11sin 45z M M =o 1cos 4550x M M KN m ==?o 11sin 4550100z z M M M M KN m =+=+=?o 22505C z x M M M KN m =+=?63.4α=o 90β=o 26.56γ=o 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N·m,M 2 = 2 N·m,求力系向 O 点简化所得的主矢'R F 和主矩M O 。 题图
第4章平面一般力系 1、图示平面机构,正方形平板与直角弯杆ABC 在C 处铰接。平板在 板面内受矩为M=8N ·m 的力偶作用,若不计平板与弯杆的重量,则当系统平衡时,直角弯杆对板的约束反力大小为( C )。 A.2N B.4N C.2N D.4N 2、悬臂梁承受均匀分布载荷,支座A 处的反力有四种结果,正确的是( B )。 A.R A =ql, M A =0 B.R A =ql, M A =q l 2 C.R A =ql, M A =q l 2 D.R A =ql, M A =q l 2 3、图示平面结构,由两根自重不计的直角弯杆组成,C 为铰链。不计各接触处摩擦,若在D 处作用有水平向左的主动力,则支座 A 对系统的约束反力为( C )。 A.F ,方向水平向右 B.,方向铅垂向上 C.F ,方向由A 点指向C 点 D.F ,方向由A 点背离C 点 4、图示平面直角弯杆ABC ,AB=3m ,BC=4m ,受两个力偶作用,其力偶矩分别为M 1=300N ·m 、M 2=600N ·m ,转向如图所示。若不计杆重及各接触处摩擦,则A 、C 支座的约束反力的大小为( D )。 A.F A =300N ,F C =100N B.F A =300N ,F C =300N C.F A =100N ,F C =300N D.F A =100N ,F C =100N 2221 31 F 2F 22 22
5、力系向某点平移的结果,可以得到( D )。 A.一个主矢量 B.一个主矩 C.一个合力 D.一个主矢量和一个主矩 6、平面一般力系向一点O简化结果,得到一个主矢量R′和一个主矩m0,下列四种情况,属于平衡的应是( B )。 A.R′≠0 m0=0 B.R′=0 m0=0 C.R′≠0 m0≠0 D.R′=0 m0≠0 7、以下有关刚体的四种说法,正确的是( D )。 A.处于平衡的物体都可视为刚体 B.变形小的物体都可视为刚体 C.自由飞行的物体都可视为刚体 D.在外力作用下,大小和形状看作不变的物体是刚体 8、力的作用线都相互平行的平面力系称(D )力系。 A.空间平行 B:空间一般 C:平面一般 D:平面平行 9、力的作用线既不汇交于一点,又不相互平行的力系称(B )力系。A:空间汇交 B:空间一般 C:平面汇交 D:平面一般 10、平面力偶系合成的结果是一个(B )。 A:合力 B:合力偶 C:主矩 D:主矢和主矩11、平面汇交力系合成的结果是一个(A )。 A:合力 B:合力偶 C:主矩 D:主矢和主矩12、平面平行力系合成的结果是(D )。 A:合力 B:合力偶 C:主矩 D:主矢和主矩 13、图示力F=2KN对A点之矩为(A )kN·m。 A:2 B:4 C:-2 D:-4
第四章 空间力系和重心 基本概念: 空间力系——作用于物体上各力的作用线不在同一平面内时,称为空间力 系。 ? ???????空间一般力系 空间汇交力系空间平作力系空间基本力系分类 §4-1 力在空间坐标轴上的投影 一.一次投影法 已知力F 与x 、y 、z 三个从标的正向夹角分别为γβα,,。 ?? ? ??===γβαcos cos cos F Z F Y F X F Z F Y F X ===γβαcos ,cos ,cos 二.二次投影法 先将F 投影到期xoy 平面内Fxy 。(Fxy 与x 夹角?)F 与Z 夹角γ。 ???? ???===γ ?γ?γcos sin sin cos sin F Z F Y F X F 可沿X ,Y ,Z 三轴分别为F x ,F y ,F z 。 §4-2 力对轴的矩 一.力对轴的矩:即此力在垂直于该轴的平面上的投影对轴与平面交点之矩。 表示力:()()d F F M F M S S O Z ?±=== 符号规定。
??? ? ?? ??????为负负向为正 正向轴的姆指力的转动方向四指右手螺旋法则M M :: 讨论:????? ?? ?????==. ,200:1面的交点的矩平面上的分力对轴和平的可以看成力在垂直于轴力时轴的矩平行相交当力与转轴共面时Z Z M M 二.合力矩定理 合力对任一轴的矩等于各分力对同一轴之矩的代教和, ()()Fi M R M Z Z ∑= 三.力对点之矩的矢量表示 1、矢量表达式()F r F M ?=0 2、判断表达式: ()Z Y X F F F z y x k j i F r F M ?=0 ()()()k yFx xFy j xFi zFx i zFy yFi -+-+-= 力矩在三个坐标轴上的投影 ()[]()()[]()()[]()??? ??=-==-==-=F m yF xF F M F m xF zF F M F m zF yF F M z x y z O y z x Y O x y z X O 即:力对点之矩在通过该点的任一轴上的投影等于该力对此轴之矩。 例4-1 (精讲) §4-3 空间系的平衡条件及其应用 一.空间力系向任一点消化结果 主矢: F R ∑=0 主矩: ()F M m 00∑= 用投影表示(常用) ??? ??∑=∑=∑=Z R Y R X R z y x 000 ??? ??∑=∑=∑=mz M my M mx M Z Y X 000 (三个坐标轴上的投影) (外力对轴之矩的代数和)
第四章 空间任意力系和重心 4-2.在边长为a 的正方体物体,沿对角线DA 方向作用一个 力F 。则该力对x 轴的力矩为。对z 轴的力矩为 0。对O 。 4-2水平圆盘的半径为r ,外缘C 处作用有已知力F 。力F 位于圆盘C 处的切平面内, 且与C 处圆盘切线夹角为60o ,其他尺寸如图所示。求力F 对x ,y ,z 轴之矩。 解:力F 的作用点C 的坐标为(,)2r r h 力F 沿三个坐标轴的投影为: 00cos60sin 60x F F F == 001 cos 60cos 604 y F F F =-=- 0sin 60z F F =-= 则有: 1()()(3)2244x z y F M yF zF r F h F h r =-= ?--?-=- ())2y x z r M zF xF h r h =-=-?=+ 1()242 z y x r Fr M xF yF F =-=?-=- x 图4-2
4-3 图示空间构架由三根无重直杆组成,在D 端用球铰链连接,如图所示。A ,B 和C 端则用球铰链固定在水平底板上。如果挂在D 端的物重P=10KN ,求铰链A ,B 和C 的 解:整体受力分析如图所示(空间汇交力系): 0 x F =∑;00cos45cos450A B F F -= 0 y F =∑;00000sin 45cos30sin 45cos30cos150A B C F F F +-= 0 z F =∑;00000sin 45sin30sin 45sin30sin150A B C F F F P +--= 解得:26.39A B F F kN ==,33.46C F kN = 4-4 图示六杆支撑一水平板,在板角处受铅直力F 作用。设板和杆自重不计,求各杆的 内力。 解:所有杆件均为二力杆,假设所有杆件均受拉,水平板受力如图所示: 对3杆所在的轴取矩: 3 0M =∑;4340F d ?= 即得:40F =(1,5杆与3杆平行,6杆与3杆相交) 对1杆所在的轴取矩: 1 0M =∑;6614410F d F d ?+?= 即得:60F =(3,5杆与1杆平行) 图4-4
第五章空间任意力系 5.1解:cos45sin 60 1.22x F F KN c o s 45c o s 60 0.7 y F F K N sin 45 1.4z F F KN 6084.85x z M F mm KN mm 5070.71y z M F mm KN mm 6050108.84 z x y M F m m F m m K N m m 5.2 解:21sin cos sin x F F F 1c o s c o s y F F 12sin cos z F F F 12sin cos x z M F a aF aF 1sin y M aF 121cos cos sin cos sin z y x M F a F a aF aF aF 5.3解:两力F 、F ′能形成力矩1 M 1 502M Fa KN m 11cos45x M M 10y M 11sin 45 z M M 1c o s 45 50x M M K N m 11sin 45 50 100z z M M M M KN m 2 2 505C z x M M M KN m 63.4 90 26.56 5.4 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中 心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N ·m ,M 2 = 2 N ·m ,求力系 向O 点简化所得的主矢 ' R F 和主矩M O 。 题5.4图 解:' 1236R F F F F N
方向为Z 轴正方向 21232248x M M F F F N m 11 2 3 312y M M F F F N m 2 2 14.42O y x M M M N m 56.6333.990 5.5 解: 120,cos30cos300Ax Bx X F F T T 210,sin30 sin30 0Az Bz Z F F T T W 120,60cos3060cos301000 z Bx M T T F 120,3060sin30 60sin301000 x Bz M W T T F 2111 0,0 y M Wr T r Tr 20.78,13Ax Az F KN F KN 7.79, 4.5Bx Bz F KN F KN 1 2 10,5T KN T KN 5.6 题5.6图 2a ,AB 长为2b ,列出平衡方程并求解