蜂鸣器驱动模块
在单片机应用的设计上,很多方案都会用到蜂鸣器,大部分都是使用蜂鸣
器来做提示或报警,比如按键按下、开始工作、工作结束或是故障等等。这里对中颖电子的单片机在蜂鸣器驱动上的应用作一下描述。
1. 驱动方式
由于自激蜂鸣器是直流电压驱动的,不需要利用交流信号进行驱动,只需对
驱动口输出驱动电平并通过三极管放大驱动电流就能使蜂鸣器发出声音,很简单,这里就不对自激蜂鸣器进行说明了。这里只对必须用1/2duty 的方波信号进行驱动的他激蜂鸣器进行说明。
单片机驱动他激蜂鸣器的方式有两种:一种是PWM 输出口直接驱动,另一种
是利用I/O 定时翻转电平产生驱动波形对蜂鸣器进行驱动。
PWM 输出口直接驱动是利用PWM 输出口本身可以输出一定的方波来直接驱动
蜂鸣器。在单片机的软件设置中有几个系统寄存器是用来设置PWM 口的输出的,可以设置占空比、周期等等,通过设置这些寄存器产生符合蜂鸣器要求的频率的波形之后,只要打开PWM 输出,PWM 输出口就能输出该频率的方波,这个时候利用这个波形就可以驱动蜂鸣器了。比如频率为2000Hz 的蜂鸣器的驱动,可以知道周期为500μs,这样只需要把PWM 的周期设置为500μs,占空比电平设置为250μs,就能产生一个频率为2000Hz 的方波,通过这个方波再利用三极管就可以去驱动这个蜂鸣器了。
而利用I/O 定时翻转电平来产生驱动波形的方式会比较麻烦一点,必须利用
定时器来做定时,通过定时翻转电平产生符合蜂鸣器要求的频率的波形,这个波形就可以用来驱动蜂鸣器了。比如为2500Hz 的蜂鸣器的驱动,可以知道周期为400μs,这样只需要驱动蜂鸣器的I/O 口每200μs 翻转一次电平就可以产生一个频率为2500Hz,占空比为1/2duty 的方波,再通过三极管放大就可以驱动这个蜂鸣器了。
2. 蜂鸣器驱动电路
由于蜂鸣器的工作电流一般比较大,以致于单片机的I/O 口是无法直接驱动的,所以要利用放大电路来驱动,一般使用三极管来放大电流就可以了。
蜂鸣器的驱动电路有很多种,这里举两个常用的例子,也是建议使用的驱动
电路:
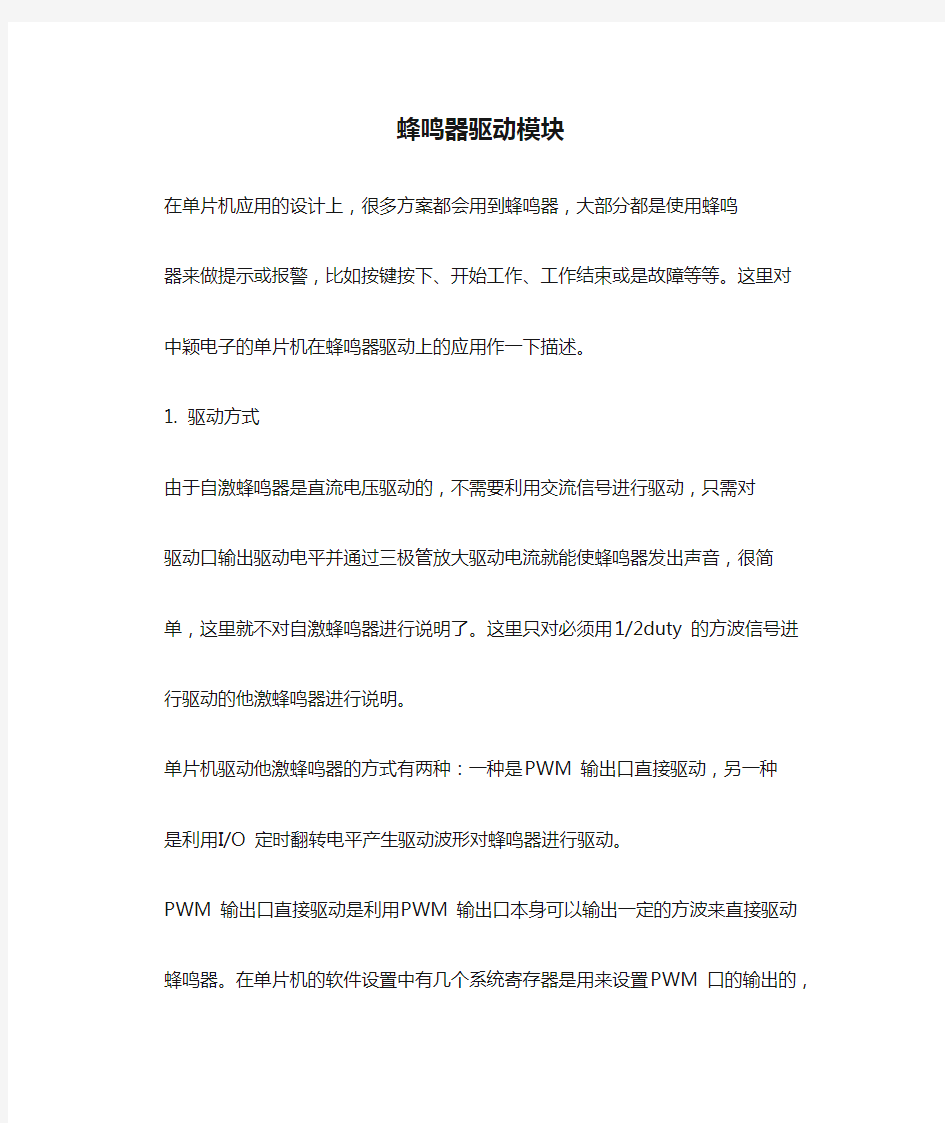
1.1. 无源压电式蜂鸣器、无源电磁式蜂鸣器(他激)
图1-1 无源压电式蜂鸣器、无源电磁式蜂鸣器驱动电路
1.2. 有源压电式蜂鸣器、有源电磁式蜂鸣器(自激)
图1-2 有源压电式蜂鸣器、有源电磁式蜂鸣器驱动电路
3. 蜂鸣器驱动设计
由于这里要介绍两种驱动方式的方法,所以在设计模块系统中将两种驱动方
式做到一块,即程序里边不仅介绍了PWM 输出口驱动蜂鸣器的方法,还要介绍
I/O 口驱动蜂鸣器的方法。所以,我们将设计如下的一个系统来说明单片机对蜂鸣器的驱动:系统有两个他激蜂鸣器,频率都为2000Hz,一个由I/O 口进行控制,另一个由PWM 输出口进行控制;系统还有两个按键,一个按键为PORT 按键,I/O 口控制的蜂鸣器不鸣叫时按一次按键I/O 口控制的蜂鸣器鸣叫,再按一次停止鸣叫,另一个按键为PWM 按键,PWM 口控制的蜂鸣器不鸣叫时按一次按键PWM 输出口控制的蜂鸣器鸣叫,再按一次停止鸣叫。
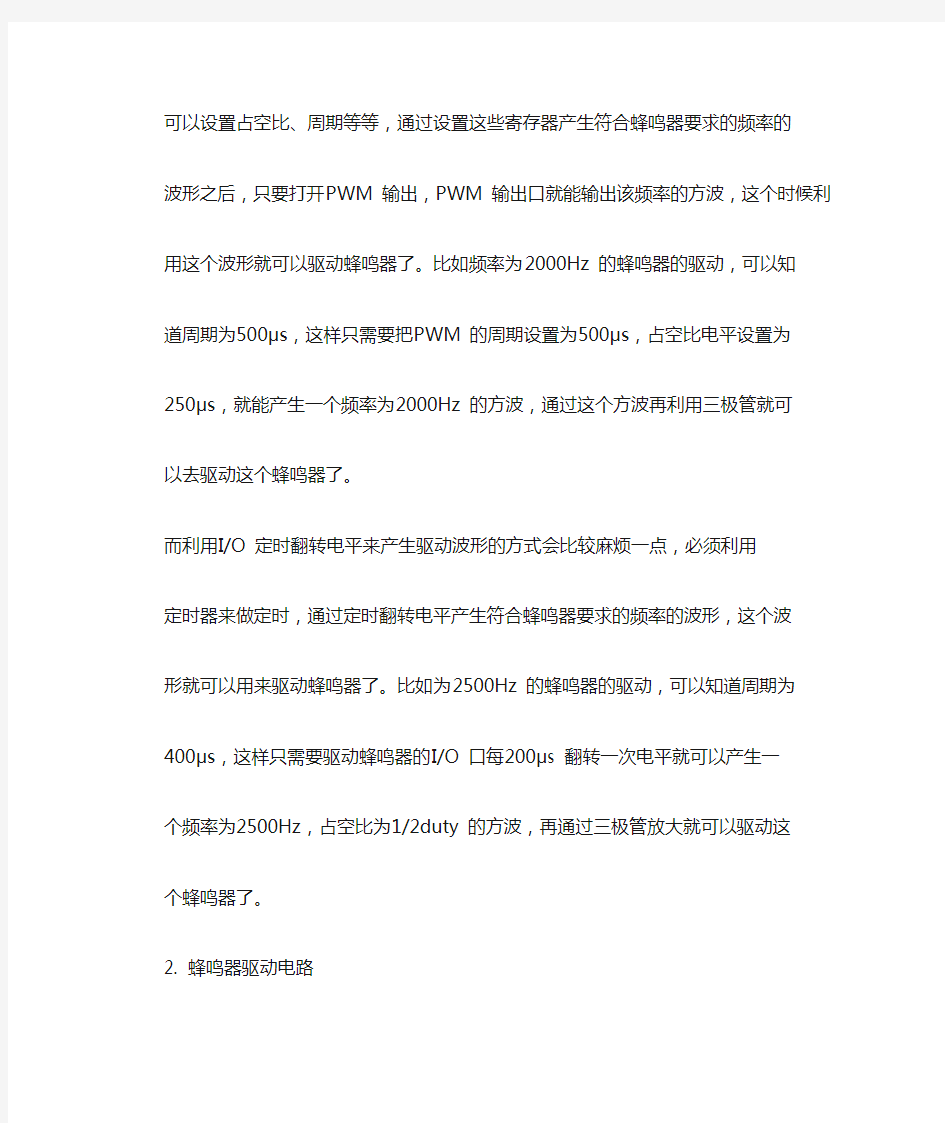
电路原理图
如图1-3 所示,使用SH69P43 为控制芯片,使用4MHz 晶振作为主振荡器。PORTC.3/T0 作为I/O 口通过三极管Q2 来驱动蜂鸣器LS1,而PORTC.2/PWM0 则作为PWM 输出口通过三极管Q1 来驱动蜂鸣器LS2。另外在PORTA.3 和PORTA.2 分别接了两个按键,一个是PWM 按键,是用来控制PWM 输出口驱动蜂鸣器使用的;另一个是PORT 按键,是用来控制I/O 口驱动蜂鸣器使用的。连接按键的I/O 口开内部上拉电阻。
图1-3 SH69P43 驱动蜂鸣器原理图
软件设计方法
先分析一下蜂鸣器。所使用的蜂鸣器的工作频率是2000Hz,也就是说蜂鸣
器的驱动信号波形周期是500μs,由于是1/2duty 的信号,所以一个周期内的高电平和低电平的时间宽度都为250μs。
软件设计上,我们将根据两种驱动方式来进行说明。
a) PWM 输出口直接驱动蜂鸣器方式
由于PWM 只控制固定频率的蜂鸣器,所以可以在程序的系统初始化时就对
PWM 的输出波形进行设置。
首先根据SH69P43 的PWM 输出的周期宽度是10 位数据来选择PWM 时钟。系
统使用4MHz 的晶振作为主振荡器,一个t osc 的时间就是0.25μs,若是将PWM 的时钟设置为t osc 的话,则蜂鸣器要求的波形周期500μs 的计数值为
500μs/0.25μs=(2000)10=(7D0)16,7D0H 为11 位的数据,而SH69P43 的PWM 输出周期宽度只是10 位数据,所以选择PWM 的时钟为t osc 是不能实现蜂鸣器所要的驱动波形的。
这里我们将PWM 的时钟设置为4t osc,这样一个PWM 的时钟周期就是1μs 了,
由此可以算出500μs 对应的计数值为500μs/1μs=(500)10=(1F4)16,即分别在周期寄存器的高2 位、中4 位和低4 位三个寄存器中填入1、F 和4,就完成了对输出周期的设置。再来设置占空比寄存器,在PWM 输出中占空比的实现是通过设定一个周期内电平的宽度来实现的。当输出模式选择为普通模式时,占空比寄存器是用来设置高电平的宽度。250μs 的宽度计数值为250μs/1μs=(250)
10=(0FA)16。只需要在占空比寄存器的高2 位、中4 位和低4 位中分别填入0、F 和A 就可以完成对占空比的设置了,设置占空比为1/2duty。
以后只需要打开PWM 输出,PWM 输出口自然就能输出频率为2000Hz、占空比
为1/2duty 的方波。
b) I/O 口定时翻转电平驱动蜂鸣器方式
使用I/O 口定时翻转电平驱动蜂鸣器方式的设置比较简单,只需要对波形分
析一下。由于驱动的信号刚好为周期500μs,占空比为1/2duty 的方波,只需要每250μs 进行一次电平翻转,就可以得到驱动蜂鸣器的方波信号。
在程序上,可以使用TIMER0 来定时,将TIMER0 的预分频设置为/1,选择TIMER0 的始终为系统时钟(主振荡器时钟/4),在TIMER0 的载入/计数寄存器的高4 位和低4 位分别写入00H 和06H,就能将TIMER0 的中断设置为250μs。
当需要I/O 口驱动的蜂鸣器鸣叫时,只需要在进入TIMER0 中断的时候对该
I/O 口的电平进行翻转一次,直到蜂鸣器不需要鸣叫的时候,将I/O 口的电平设置为低电平即可。不鸣叫时将I/O 口的输出电平设置为低电平是为了防止漏电。
程序
以下是带有两种驱动方式的蜂鸣器驱动模块程序,其中黄色背景的内容是关
于I/O 口定时翻转电平驱动方式的,绿色背景的内容则是关于PWM 输出口直接驱动方式的:
例[1-1]
LIST P=69P43
ROMSIZE=3072
;************************************************
; 系统寄存器
;************************************************
IE EQU 00H ;中断使能标志
IRQ EQU 01H ;中断请求标志
TM0 EQU 02H ;Timer0 模式寄存器
TL0 EQU 04H ;Timer0 装入/记数寄存器低四位
TH0 EQU 05H ;Timer0 装入/记数寄存器高四位
PORTA EQU 08H ;Port A 数据寄存器
PORTC EQU 0AH ;Port C 数据寄存器
TBR EQU 0EH ;查表寄存器
INX EQU 0FH ;间接寻址伪索引寄存器
DPL EQU 10H ;INX 数据指针低四位
DPM EQU 11H ;INX 数据指针中三位
DPH EQU 12H ;INX 数据指针高三位
PACR EQU 18H ;PortA 输入/输出控制寄存器
PCCR EQU 1AH ;PortC 输入/输出控制寄存器
PWM0 EQU 20H ;位0:选择PWM 输出, 位2-1:设置PWM0 时钟, 位3:设置PWM0 占空比输出模
式
PP0L EQU 22H ;PWM0 周期低四位
PP0M EQU 23H ;PWM0 周期中四位
PP0H EQU 24H ;PWM0 周期高二位
PD0L EQU 25H ;PWM0 占空比低四位
PD0M EQU 26H ;PWM0 占空比中四位
PD0H EQU 27H ;PWM0 占空比高二位
;************************************************
; 用户定义寄存器(Bank0)
;************************************************
AC_BAK EQU 30H ;AC 值备份寄存器
PA_BAK EQU 31H ;PortA 缓冲寄存器
PC_BAK EQU 32H ;PortC 缓冲寄存器
TMP_T0 EQU 33H ;临时寄存器用于TIMER0
;--------------------------------------
F_TIMER EQU 34H
;位0=1, 5ms 到
FLAG1 EQU 35H
;位0=1, 按键未松开
;位3=1, 需使用I/O 口驱动蜂鸣器
;--------------------------------------
KCODE_NEW EQU 36H ;旧的按键码
KCODE_OLD EQU 37H ;新的按键码
KEYS_CT EQU 38H ;按键扫描次数
;--------------------------------------
T5MS_CT1 EQU 39H ;5ms 计数器低位
T5MS_CT2 EQU 3AH ;5ms 计数器高位
;************************************************
; 程序
;************************************************
ORG 0000H
JMP RESET
RTNI
JMP TIMER0_ISP
RTNI
RTNI
;*******************************************
; 子程序: TIMER0 中断服务程序(250us 中断)
;*******************************************
TIMER0_ISP:
STA AC_BAK,00H ;备份AC 值
ANDIM IRQ,1011B ;清TIMER0 中断请求标志
;****************************
; 模块: I/O 口驱动蜂鸣器模块
;****************************
PORT_BUZ:
ADI FLAG1,1000B
BA3 PORT_BUZ_NO ;不需要I/O 口驱动蜂鸣器,跳转
EORIM PC_BAK,1000B
STA PORTC,00H ;PORTC.3 翻转电平
JMP PORT_BUZ_END
PORT_BUZ_NO:
ANDIM PC_BAK,0111B
STA PORTC,00H ;PORTC.3 口驱动的蜂鸣器未鸣叫时,输出低电平以保证不漏电PORT_BUZ_END:
;****************************
J5MS: ;判断5ms到
SBIM T5MS_CT1,01H
LDI TMP_T0,00H
SBCM T5MS_CT2,00H
OR T5MS_CT1,00H
BNZ TIMER0_ISP_END ;5ms 未到,跳转
LDI T5MS_CT1,04H
LDI T5MS_CT2,01H ;重新加载5ms 计数值
ORIM F_TIMER,0001B ;设置"5ms 到"标志
TIMER0_ISP_END:
LDI IE,0100B ;开TIMER0 中断
LDA AC_BAK,00H ;恢复AC 值
RTNI ;返回
;*******************************************
; 上电程序
;*******************************************
RESET:
NOP
;--------------------------------------
; 清用户寄存器
POWER_RESET:
LDI DPL,00H
LDI DPM,02H
LDI DPH,00H
POWER_RESET_1:
LDI INX,00H
ADIM DPL,01H
LDI TBR,00H
ADCM DPM,00H
BA3 POWER_RESET_2
JMP POWER_RESET_3
POWER_RESET_2:
ADIM DPH,01H
POWER_RESET_3:
SBI DPH,01H
BNZ POWER_RESET_1
SBI DPM,04H
BNZ POWER_RESET_1
;--------------------------------------
; 初始化系统寄存器
SYSTEM_INITIAL:
;TIMER0 初始化
LDI TM0,07H ;设置TIMER0 预分频为/1
LDI TL0,06H
LDI TH0,00H ;设置中断时间为250us
LDI T5MS_CT1,04H
LDI T5MS_CT2,01H
;I/O 口初始化
LDI PORTC,0011B
LDI PCCR,1100B ;设置PORTC.2 和PORTC.3 为输出口
LDI PORTA,0FH ;打开PORTA 上拉电阻
;PWM 初始化
LDI PWM0,04H ;设置PWM0 时钟为4tosc,占空比输出模式为正常模式
LDI PP0H,01H
LDI PP0M,0FH
LDI PP0L,04H ;设置周期为500us
LDI PD0H,00H
LDI PD0M,0FH
LDI PD0L,0AH ;设置占空比电平为250us,得频率为2KHz,占空比为1/2duty 的
;信号
;--------------------------------------
MAIN_PRE:
LDI IRQ,00H
LDI IE,0100B ;打开Timer0 中断
;************************************************
MAIN:
ADI F_TIMER,0001B
BA0 HALTMODE ;未到5ms, 跳转
ANDIM F_TIMER,1110B ;清"5ms 到"标志
;**************************************
; 按键扫描
;**************************************
KEYSCAN:
LDA PORTA,00H
STA TBR,00H
SBI TBR,0FH
BAZ NO_KEY ;没有扫描到按键按下,跳转
LDA FLAG1,00H
BA0 KEYSCAN_END ;之前的按键未松开,不再扫描按键,跳转
SBI TBR,0111B
BAZ KS_PORT ;PORT 键按下,跳转
SBI TBR,1011B
BAZ KS_PWM ;PWM 键按下,跳转
JMP KEYSCAN_END
KS_PORT:
LDI KCODE_NEW,0001B ;设置PORT 键的键码为01H
JMP KEYSCAN_1
KS_PWM:
LDI KCODE_NEW,0010B ;设置PWM 键的键码为02H
KEYSCAN_1:
ADIM KEYS_CT,01H ;扫描次数加一
SBI KEYS_CT,01H
BAZ KEYSCAN_2 ;第一次扫描到该按键,无需与旧按键进行比较,跳转LDA KCODE_OLD,00H
SUB KCODE_NEW,00H ;新扫描的按键码与上次扫描的按键码比较
BAZ KEYSCAN_2 ;同一个按键,跳转
LDI KEYS_CT,01H ;不是同一按键,将扫描次数置为1,为新按键KEYSCAN_2:
LDA KCODE_NEW,00H
STA KCODE_OLD,00H ;将新的按键码赋值给旧的按键码
SBI KEYS_CT,0AH
BNC KEYSCAN_END ;扫描未到10 次(50ms), 跳转
;已扫描到该按键10 次
LDI KEYS_CT,00H ;清按键扫描次数
ORIM FLAG1,0001B ;设置"按键未松开"标志
LDA KCODE_OLD,00H
BA0 KEY_PORT
KEY_PWM: ;PWM 键
EORIM PWM0,0001B ;PWM 输出开启或关闭,PWM 口驱动的蜂鸣器鸣叫或停止JMP KEYSCAN_END
KEY_PORT: ;PORT 键
EORIM FLAG1,1000B ;I/O 定时翻转电平开启或停止翻转
;I/O 口驱动的蜂鸣器鸣叫或停止
JMP KEYSCAN_END
NO_KEY:
ANDIM FLAG1,1110B ;清"按键未松开"标志
LDI KEYS_CT,00H ;清按键扫描次数
KEYSCAN_END:
;*************************************
HALTMODE:
NOP
HALT ;进入HALT 模式
NOP
NOP
JMP MAIN
END__
合肥师范学院 嵌入式系统开发技术 课程设计 专业:计算机科学与技术(嵌入式) 班级:嵌入式应用技术 学号: 110441034 1110441047 1110441060 姓名:钱鹏鹏汪新妹郭航峰 设计题目:蜂鸣器驱动程序设计 2014年05月
1.绪论_______________________________________________________________ 3 1.1概要 _________________________________________________________________ 3 1.2设计内容 _____________________________________________________________ 4 2.开发环境的搭建_____________________________________________________ 4 2.1Redhat的安装 _________________________________________________________ 4 2.2安装arm-linux-gcc交叉编译器__________________________________________ 9 2.3安装及编译linux-2.6.29-mini2440-20090708内核_________________________ 9 3.字符设备驱动相关知识_______________________________________________ 9 3.1模块机制 _____________________________________________________________ 9 3.2字符设备开发基本步骤_________________________________________________ 10 3.3主设备号和次设备号___________________________________________________ 11 3.4实现字符驱动程序_____________________________________________________ 12 4.蜂鸣器原理________________________________________________________ 14 4.1蜂鸣器的种类和工作原理_______________________________________________ 14 4.2开发板上蜂鸣器原理图分析_____________________________________________ 15 4.3GPB0参数 ____________________________________________________________ 15 5.总体设计__________________________________________________________ 16 5.1设计思路 ____________________________________________________________ 16 5.2设计步骤 ____________________________________________________________ 16 6. 驱动及测试程序___________________________________________________ 17 6.1beep.c _______________________________________________________________ 17 6.2beep_tset.c __________________________________________________________ 21 7.运行结果及截图____________________________________________________ 22综合设计总结与思考__________________________________________________ 25
3.3 蜂鸣器播放歌曲原理 一般说来,单片机演奏音乐基本都是单音频率,它不包含相应幅度的谐波频率。因此单片机奏乐只需弄清楚两个概念即可,也就是“音调”和“节拍”。音调表示一个音符唱多高的频率,节拍表示一个音符唱多长的时间。 1)音调的确定 音调就是我们常说的音高。它是由频率来确定的!我们可以查出各个音符所对应的相应的频率,那么现在就需要我们来用51来发出相应频率的声音!我们常采用的方法就是通过单片机的定时器定时中断,将单片机上对应蜂鸣器的I/O口来回取反,或者说来回清零,置位,从而让蜂鸣器发出声音,为了让单片机发出不同频率的声音,我们只需将定时器予置不同的定时值就可实现。 2)节拍的确定 一般说来,如果乐曲没有特殊说明,一拍的时长大约为400—500ms 。 3.3 蜂鸣器播放歌曲程序 #include
// 频率-半周期数据表高八位本软件共保存了四个八度的28个频率数据code unsigned char FREQH[] = { 0xF2, 0xF3, 0xF5, 0xF5, 0xF6, 0xF7, 0xF8, //低音1234567 0xF9, 0xF9, 0xFA, 0xFA, 0xFB, 0xFB, 0xFC, 0xFC,//1,2,3,4,5,6,7,i 0xFC, 0xFD, 0xFD, 0xFD, 0xFD, 0xFE, //高音 234567 0xFE, 0xFE, 0xFE, 0xFE, 0xFE, 0xFE, 0xFF}; //超高音 1234567 // 频率-半周期数据表低八位 code unsigned char FREQL[] = { 0x42, 0xC1, 0x17, 0xB6, 0xD0, 0xD1, 0xB6, //低音1234567 0x21, 0xE1, 0x8C, 0xD8, 0x68, 0xE9, 0x5B, 0x8F, //1,2,3,4,5,6,7,i 0xEE, 0x44, 0x6B, 0xB4, 0xF4, 0x2D, //高音 234567 0x47, 0x77, 0xA2, 0xB6, 0xDA, 0xFA, 0x16}; //超高音 1234567 //-------------------------------------- //世上只有妈妈好数据表要想演奏不同的乐曲, 只需要修改这个数据表 code unsigned char sszymmh[] = { 6, 2, 3, 5, 2, 1, 3, 2, 2, 5, 2, 2, 1, 3, 2, 6, 2, 1, 5, 2, 1, //一个音符有三个数字。前为第几个音、中为第几个八度、后为时长(以半拍为单位)。 //6, 2, 3 分别代表:啦, 中音, 3个半拍; //5, 2, 1 分别代表:嗦, 中音, 1个半拍; //3, 2, 2 分别代表:咪, 中音, 2个半拍; //5, 2, 2 分别代表:嗦, 中音, 2个半拍; //1, 3, 2 分别代表:哆, 高音, 2个半拍; 6, 2, 4, 3, 2, 2, 5, 2, 1, 6, 2, 1, 5, 2, 2, 3, 2, 2, 1, 2, 1, 6, 1, 1, 5, 2, 1, 3, 2, 1, 2, 2, 4, 2, 2, 3, 3, 2, 1, 5, 2, 2, 5, 2, 1, 6, 2, 1, 3, 2, 2, 2, 2, 2, 1, 2, 4, 5, 2, 3, 3, 2, 1, 2, 2, 1, 1, 2, 1, 6, 1, 1, 1, 2, 1, 5, 1, 6, 0, 0, 0}; //-------------------------------------- void t0int() interrupt 1 //T0中断程序,控制发音的音调 { TR0 = 0; //先关闭T0 speaker = !speaker; //输出方波, 发音 TH0 = timer0h; //下次的中断时间, 这个时间, 控制音调高低 TL0 = timer0l; TR0 = 1; //启动T0 } //-------------------------------------- void delay(unsigned char t) //延时程序,控制发音的时间长度 { unsigned char t1; unsigned long t2;
实验三-利用蜂鸣器演奏音乐 一、实验目的 1.了解BlueSkyC51单片机实验板中蜂鸣器的硬件电路 2.学会利用蜂鸣器实现音乐的演奏 3.掌握蜂鸣器实现音乐演奏的编程 二、实验硬件设计及电路 1. BlueSkyC51单片机实验板 ` 2.单片机最小系统
。 3.蜂鸣器电路连接 三极管主要是做驱动用的。因为单片机的IO口驱动能力不够让蜂鸣器发出声音,所以
我们通过三极管放大驱动电流,从而可以让蜂鸣器发出声音,你要是输出高电平,三极管导通,集电极电流通过蜂鸣器让蜂鸣器发出声音,当输出低电平时,三极管截止,没有电流流过蜂鸣器,所以就不会发出声音。 三、实验原理 1.音调及节拍 用一个口,输出方波,这个方波输入进蜂鸣器就会产生声音,通过控制方波的频率、时间,就能产生简单的音乐。一般说来,单片机演奏音乐基本都是单音频率,因此单片机奏乐只需控制音调和节拍。 (1)音调的确定 音调是由频率来确定的。通过单片机的定时器定时中断,将单片机上对应蜂鸣器的I/O 口来回取反,从而让蜂鸣器发出不同频率的声音。只需将定时器给以不同的定时值就可实现。通过延时,即可发出所需要的频率。 … (2)节拍的确定 一拍的时长大约为400—500ms,每个音符的时长通过节拍来计算。详细见程序代码。 2.软件设计相关 (1)头文件 #include<> #define uint unsigned int #define uchar unsigned char #define ulong unsigned long sbit beep=P1^4; 译实验相关问题 ; (1)实际发音颤音重 解决方法为修改蜂鸣器的驱动频率. (2)实际节奏过快或者过慢 调整延时 四、C51程序代码(部分来源于网络) #include<> #define uint unsigned int #define uchar unsigned char #define ulong unsigned long ~ sbit beep=P1^4; //蜂鸣器与口连接 uchar th0_f; //中断装载T0高8位 uchar tl0_f; //T0低8位 uchar code freq[36*2]={ //音阶码表 0xf7,0xd8, //440hz , 1 //0 0xf8,0x50, //466hz , 1# //1
单片机设计报告 课程单片机课程设计 设计题目 LED灯及蜂鸣器 设计题目: 一、要求 1.了解LED显示流水灯的原理。 2.能够在LED上显示和控制蜂鸣器的工作。 3.熟悉掌握keil软件的使用。 二、分析 本设计使用AT89C52RC做为主控制模块,利用简单的外围电路来驱动LED蝴蝶。设计分为三个模块:单片机控制模块,输出显示模块和驱动模块,单片机控制模块以单片机为核心,以软件KEIL编程实现信号输出,以驱动LED及蜂鸣器为目的。 三、设计 1、硬件方面 (1)、LED驱动模块 图文显示有静态和动态两种方案,本设计中静动态都用到了。动态扫描的意思简单的说就是轮流点亮。具体就图案来说,把内部同行的发光管的阳极相连在一起,先送出对应行的发光管亮灭的数据并锁存,然后选通其它行使其燃亮相同的时间,然后熄灭。反复循环。 蜂鸣器的控制则是加入三极管接在VCC,单片机的第20引脚和负极上,以此来控制蜂鸣器的工作。 (2)、硬件设计 实验板上设计一个蝴蝶状的LED显示,可用于简单的图形图像。蝴蝶的图案是由74个LED绿灯、8个红灯、10个黄灯拼接而成。 其中绿灯直接接到正负极上,黄灯和红灯接到单片机的P2口,来控制其闪动。 2、软件编程(包括流程图、完整的汇编源程序及其注释) 1.电路图 本软件要求实现如下要求:外圈绿灯亮度明亮,红灯和黄灯都不停地闪动,蜂鸣器自动播放歌曲。 电路图如下:
2.主程序 本设计的系统软件能使系统LED各点亮度均匀,充足,可显示清晰图案,并且闪动。 系统主程序开始后,首先是对系统环境初始化,包括设置串口,中断和端口;然后闪动红黄灯,由于单片机没有停机指令,所以可以设置系统程序不断循环。 3.序代码如下: #include
蜂鸣器的介绍 推荐 一)蜂鸣器的介绍 1.蜂鸣器的作用蜂鸣器是一种一体化结构的电子讯响器,采用直流电压供电,广泛应用于计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件。 2.蜂鸣器的分类蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。 3.蜂鸣器的电路图形符号蜂鸣器在电路中用字母“H”或“HA”(旧标准用“FM”、“LB”、“JD”等)表示。 (二)蜂鸣器的结构原理 1.压电式蜂鸣器压电式蜂鸣器主要由多谐振荡器、压电蜂鸣片、阻抗匹配器及共鸣箱、外壳等组成。有的压电式蜂鸣器外壳上还装有发光二极管。 多谐振荡器由晶体管或集成电路构成。当接通电源后(1.5~15V直流工作电压),多谐振荡器起振,输出1.5~2.5kHZ的音频信号,阻抗匹配器推动压电蜂鸣片发声。 压电蜂鸣片由锆钛酸铅或铌镁酸铅压电陶瓷材料制成。在陶瓷片的两面镀上银电极,经极化和老化处理后,再与黄铜片或不锈钢片粘在一起。 2.电磁式蜂鸣器电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。 接通电源后,振荡器产生的音频信号电流通过电磁线圈,使电磁线圈产生磁场。振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。 一、常规电磁蜂鸣器产品是如何工作的? 无源电磁蜂鸣器工作原理是:交流信号通过绕在支架上的线包在支架的芯柱上产生一交变的磁通,交变的磁通和磁环恒定磁通进行叠加,使钼片以给定的交流信号频率振动并配合共振腔发声。产品的整个频率和声压的响应曲线与间隙值、钼片的固有振动频率(可粗略折射为小钼片的厚度)、外壳(亥姆霍兹共振声腔)频率、磁环的磁强漆包线的线径有直接关系。 二、常规电磁无源蜂鸣器产品由哪些材料组成? 三、常规压电蜂鸣器产品是如何工作的?
LJMP START ORG 000BH INC 20H ;中断服务,中断计数器加1 MOV TH0,#0D8H MOV TL0,#0EFH ;12M晶振,形成10毫秒中断RETI START: MOV SP,#50H MOV TH0,#0D8H MOV TL0,#0EFH MOV TMOD,#01H MOV IE,#82H MUSIC0: NOP MOV DPTR,#DAT ;表头地址送DPTR MOV 20H,#00H ;中断计数器清0 MUSIC1: NOP CLR A MOVC A,@A+DPTR ;查表取代码 JZ END0 ;是00H,则结束 CJNE A,#0FFH,MUSIC5 LJMP MUSIC3 MUSIC5:NOP MOV R6,A INC DPTR MOV A,#0 MOVC A,@A+DPTR MOV R7,A SETB TR0 MUSIC2:NOP CPL P3.2 MOV A,R6 MOV R3,A LCALL DEL MOV A,R7 CJNE A,20H,MUSIC2 MOV 20H,#00H INC DPTR LJMP MUSIC1 MUSIC3:NOP CLR TR0 MOV R2,#0DH
MOV R2,#0FFH LCALL DEL DJNZ R2,MUSIC4 INC DPTR LJMP MUSIC1 END0:NOP MOV R2,#0FFH MUSIC6:MOV R3,#00H LJMP MUSIC0 DEL:NOP DEL3:MOV R4,#02H DEL4:NOP DJNZ R4,DEL4 NOP DJNZ R3,DEL3 RET NOP DAT: DB 18H, 30H, 1CH, 10H DB 20H, 40H, 1CH, 10H DB 18H, 10H, 20H, 10H DB 1CH, 10H, 18H, 40H DB 1CH, 20H, 20H, 20H DB 1CH, 20H, 18H, 20H DB 20H, 80H, 0FFH, 20H DB 30H, 1CH, 10H , 18H DB 20H, 15H, 20H , 1CH DB 20H, 20H, 20H , 26H DB 40H, 20H , 20H , 2BH DB 20H, 26H, 20H , 20H DB 20H, 30H , 80H , 0FFH DB 20H, 20H, 1CH , 10H DB 18H, 10H, 20H , 20H DB 26H, 20H , 2BH , 20H DB 30H, 20H , 2BH , 40H DB 20H, 20H , 1CH , 10H DB 18H, 10H, 20H, 20H DB 26H, 20H , 2BH, 20H DB 30H, 20H, 2BH , 40H DB 20H, 30H, 1CH , 10H DB 18H, 20H , 15H , 20H DB 1CH, 20H , 20H , 20H DB 26H, 40H, 20H , 20H
单片机蜂鸣器奏乐实验大 全代码 This manuscript was revised by the office on December 10, 2020.
O R G0000H LJMP START ORG 000BH INC 20H ;中断服务,中断计数器加1 MOV TH0,#0D8H MOV TL0,#0EFH ;12M晶振,形成10毫秒中断 RETI START: MOV SP,#50H MOV TH0,#0D8H MOV TL0,#0EFH MOV TMOD,#01H MOV IE,#82H MUSIC0: NOP MOV DPTR,#DAT ;表头地址送DPTR MOV 20H,#00H ;中断计数器清0 MUSIC1: NOP CLR A MOVC A,@A+DPTR ;查表取代码 JZ END0 ;是00H,则结束 CJNE A,#0FFH,MUSIC5 LJMP MUSIC3 MUSIC5:NOP MOV R6,A INC DPTR MOV A,#0 MOVC A,@A+DPTR MOV R7,A SETB TR0 MUSIC2:NOP CPL MOV A,R6 MOV R3,A LCALL DEL MOV A,R7 CJNE A,20H,MUSIC2 MOV 20H,#00H INC DPTR LJMP MUSIC1 MUSIC3:NOP CLR TR0
MOV R2,#0DH MUSIC4:NOP MOV R2,#0FFH LCALL DEL DJNZ R2,MUSIC4 INC DPTR LJMP MUSIC1 END0:NOP MOV R2,#0FFH MUSIC6:MOV R3,#00H LJMP MUSIC0 DEL:NOP DEL3:MOV R4,#02H DEL4:NOP DJNZ R4,DEL4 NOP DJNZ R3,DEL3 RET NOP DAT: DB 18H, 30H, 1CH, 10H DB 20H, 40H, 1CH, 10H DB 18H, 10H, 20H, 10H DB 1CH, 10H, 18H, 40H DB 1CH, 20H, 20H, 20H DB 1CH, 20H, 18H, 20H DB 20H, 80H, 0FFH, 20H DB 30H, 1CH, 10H , 18H DB 20H, 15H, 20H , 1CH DB 20H, 20H, 20H , 26H DB 40H, 20H , 20H , 2BH DB 20H, 26H, 20H , 20H DB 20H, 30H , 80H , 0FFH DB 20H, 20H, 1CH , 10H DB 18H, 10H, 20H , 20H DB 26H, 20H , 2BH , 20H DB 30H, 20H , 2BH , 40H DB 20H, 20H , 1CH , 10H DB 18H, 10H, 20H, 20H DB 26H, 20H , 2BH, 20H DB 30H, 20H, 2BH , 40H DB 20H, 30H, 1CH , 10H DB 18H, 20H , 15H , 20H DB 1CH, 20H , 20H , 20H
几种驱动蜂鸣器的编程示例 以下介绍几种在S3F9454/9444下驱动蜂鸣器的编程示例,供参考 A.第一种,普通IO高低电平驱动法 ;运行环境: S3F9454,Fosc= 3.2MHz无分频 ;P2.0为蜂鸣输出端口 ;本例输出频率为4KHZ,即每250US一个周期,高低电平时间分别为125US BEEP: LD BTCON,#10100011B ;看门狗禁用 DI PUSH R5 PUSH R6 ;首先配置P2.0为普通推挽输出端口 AND P2CONL,#0FEH OR P2CONL,#02H LD R6,#0FAH ;R6设置输出方波个数,本例为250个(计时62.5MS) ONE_BEEP: LD R5,#27H ;R5为频率发生计时器,本例为近似125US(4KHZ) XOR P2,#01H _LOOP: DEC R5 JR NZ,_LOOP DEC R6 JR NZ,ONE_BEEP LD BTCON,#02H ;恢复看门狗运行 EI POP R6 POP R5 RET ;----------------------------------------------------------- B.利用P2.0配置为T0定时器匹配输出方式产生 ;注: 该方式可用于带多位数码显示扫描的软件中,可有效避免因蜂鸣器 ;输出而造成的数码显示抖动闪烁 ;因定时器T0被分配作为T0匹配输出定时器,所以本例中利用看门狗定时器 ;的实时计时器BTCNT作为数码显示实时扫描计时器 ;R0为蜂鸣时间长短计时器,由主调用程序进行予设置 ;运行环境: S3F9454,Fosc= 3.2MHZ无分频 ;P2.0为蜂鸣输出端口 ;本例输出频率为4KHZ,即每250US一个周期,高低电平时间分别为125US ;----------------------- BEEP: DI PUSH R1 PUSH T 0CON PUSH T0DATA ;在蜂鸣输出前首先扫描一次数码显示 CALL LED_SCAN OR P2CONL,#03H ;set P2.0 as T0 match output/every 12 5us LD T0CON,#10001000B ;set T0 input cLOCk=Fosc/8 LD T0DATA,#32H LD BTCON,#10100011B ;DISAble Watch-dog run, ;but btcnt clk input fxx/4096= 1.280ms NEXT_BEEP: LD R1,#0AH WAIT_CNT: OR BTCON,
蜂鸣器驱动 课程设计 专业: xxxxxxxxxxxxxx 班级: xxxxxxxxx 学号: xxxxxxxxx 姓名: xxxx 设计题目:蜂鸣器驱动程序设计 2016年12月
目录 一.任务 (2) 1.目标 (2) 2.环境 (2) 3.需求: (2) 二.总体设计 (2) 1.处理流程 (2) 2.模块介绍 (3) 3.模块接口设计 (3) 4.各个模块设计 (3) 三.PWM蜂鸣器字符设备驱动 (3) 1.模块设计 (3) 1. 模块介绍 (3) 2. 模块结构图 (4) 2.接口设计 (4) 1. 数据结构设计 (4) 2. 驱动程序接口 (4) 3.函数设计 (4) 1.初始化函数 (5) 2. 字符设备打开函数 (6) 3. 字符设备关闭函数 (7) 4. 模块卸载函数................................................................... ...................... (8) 5. 文件操作接口函数 (8) 四. PWM蜂鸣器字符设备驱动测试 (8) 1.调用系统函数ioctl实现对蜂鸣器的控制 (8) 五.tiny210开发板调试............................................................................. (9)
六.综合设计总结与思考................................................................... .. (10) 一.任务 1.目标: 编写按键蜂鸣器驱动程序函数与测试文件,实现上位机与tiny210-SDK开发板的连接,利用函数实现对蜂鸣器通过按键来启动与关闭。 2.环境: ①软件环境:windows 7 系统和VMware Workstation 软件 ②硬件环境:tiny210 开发板,核部分 Linux-3.0.8 ,交叉编译版本arm-linux-gcc-4.5.1-v6-vfp1 Linux系统介绍: Linux是一种自由开发源码的类Unix操作系统,存在这许多不同的Linux 版本,但它们都使用了Linux核。Linux可安装在各种计算机硬件设备中,比如手机、平板电脑、路由器、视频游戏控制台、台式计算机、大型机和超级计算机。 Linux是一个领先的操作系统,世界上运算最快的10台超级计算机运行的都是Linux操作系统。严格来说,Linux这个词本身只表示Linux核,但实际上人们已经习惯了用Linux来形容整个基于Linux核,并且使用GNU工程各种工具和数据库的操作系统。Linux得名于天才程序员林纳斯·托瓦兹。 tiny210开发板中模块介绍: ①PWM蜂鸣器模块
/*生日快乐歌曲*/ #include <> #define uint unsigned int #define uchar unsigned char sbit beep = P1^5; uchar code SONG_TONE[]={212,212,190,212,159,169,212,212,190,212,142,159, 212,212,106,126,159,169,190,119,119,126,159,142,159,0}; uchar code SONG_LONG[]={9,3,12,12,12,24,9,3,12,12,12,24, 9,3,12,12,12,12,12,9,3,12,12,12,24,0}; //延时 void DelayMS(uint x) { uchar t; while(x--) for(t=0;t<120;t++); } void PlayMusic() { uint i=0,j,k; while(SONG_LONG[i]!=0||SONG_TONE[i]!=0) { //播放各个音符,SONG_LONG 为拍子长度 for(j=0;j
单片机驱动蜂鸣器原 理与程序
单片机驱动蜂鸣器原理与设计 作者:mcu110 来源:51hei 点击数:12159 更新时间:2007年08月01日【字体:大中小】 蜂鸣器是一种一体化结构的电子讯响器,本文介绍如何用单片机驱动蜂鸣器,他广泛应用于计算机、打印机、复印机、报警器、电话机等电子产品中作发声器件。 蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。 电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。接通电源后,振荡器产生的音频信号电流通过电磁线圈,使电磁线圈产生磁场,振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。 压电式蜂鸣器主要由多谐振荡器、压电蜂鸣片、阻抗匹配器及共鸣箱、外壳等组成。多谐振荡器由晶体管或集成电路构成,当接通电源后(1.5~15V直流工作电压),多谐振荡器起振,输出1.5~2.5kHZ的音频信号,阻抗匹配器推动压电蜂鸣片发声。 下面是电磁式蜂鸣器的外形图片及结构图。。。 电磁式蜂鸣器实物图:电磁式蜂鸣器结构示意图:
图 1 图 2 电磁式蜂鸣器内部构成: 1. 防水贴纸 2. 线轴 3. 线圈 4. 磁铁 5. 底座 6. 引脚 7. 外壳 8. 铁芯 9. 封胶 10. 小铁片 11. 振动膜 12. 电路板 一、电磁式蜂鸣器驱动原理 蜂鸣器发声原理是电流通过电磁线圈,使电磁线圈产生磁场来驱动振动膜发声的,因此需要一定的电流才能驱动它,单片机IO引脚输出的电流较小,单片机输出的TTL电平基本上驱动不了蜂鸣器,因此需要增加一个电流放大的电路。S51增强型单片机实验板通过一个三极管C8550来放大驱动蜂鸣器,原理图见下面图3: S51增强型单片机实验板蜂鸣器驱动原理图:
蜂鸣器驱动 课程设计 专业:xxxxxxxxxxxxxx 班级:xxxxxxxxx 学号:xxxxxxxxx 姓名:xxxx 设计题目:蜂鸣器驱动程序设计 2016年12月
目录 一.任务 (2) 1.目标 (2) 2.环境 (2) 3.需求: (2) 二.总体设计 (2) 1.处理流程 (2) 2.模块介绍 (3) 3.模块接口设计 (3) 4.各个模块设计 (3) 三.PWM蜂鸣器字符设备驱动 (3) 1.模块设计 (3) 1. 模块介绍 (3) 2. 模块结构图 (4) 2.接口设计 (4) 1. 数据结构设计 (4) 2. 驱动程序接口 (4) 3.函数设计 (4) 1.初始化函数 (5) 2. 字符设备打开函数 (6) 3. 字符设备关闭函数 (7) 4. 模块卸载函数......................................................................................... (8) 5. 文件操作接口函数 (8) 四. PWM蜂鸣器字符设备驱动测试 (8) 1.调用系统函数ioctl实现对蜂鸣器的控制 (8) 五.tiny210开发板调试 (9) 六.综合设计总结与思考 (10)
一.任务 1.目标: 编写按键蜂鸣器驱动程序函数与测试文件,实现上位机与tiny210-SDK开发板的连接,利用函数实现对蜂鸣器通过按键来启动与关闭。 2.环境: ①软件环境:windows 7 系统和VMware Workstation 软件 ②硬件环境:tiny210开发板,内核部分Linux-3.0.8 ,交叉编译版本arm-linux-gcc-4.5.1-v6-vfp1 Linux系统介绍: Linux是一种自由开发源码的类Unix操作系统,存在这许多不同的Linux 版本,但它们都使用了Linux内核。Linux可安装在各种计算机硬件设备中,比如手机、平板电脑、路由器、视频游戏控制台、台式计算机、大型机和超级计算机。 Linux是一个领先的操作系统,世界上运算最快的10台超级计算机运行的都是Linux操作系统。严格来说,Linux这个词本身只表示Linux内核,但实际上人们已经习惯了用Linux来形容整个基于Linux内核,并且使用GNU工程各种工具和数据库的操作系统。Linux得名于天才程序员林纳斯·托瓦兹。 tiny210开发板中模块介绍: ①PWM蜂鸣器模块 PWM(脉冲宽度调制)简单的讲是一种变频技术之一,是靠改变脉冲宽度来控制输出电压,通过改变周期来控制其输出频率。来看看我们实际生活中的例子,我们的电风扇为什么扭一下按扭,风扇的转速就会发生变化;调一下收音机的声
课程设计:嵌入式系统应用 题目名称:利用蜂鸣器实现音乐播放功能 姓名: 学号: 班级: 完成时间:
1设计的任务 设计内容:动手焊接一个51单片机 设计目标:利用单片机上的蜂鸣器实现音乐播放功能 2 设计的过程 2.1 基本结构 1.STC89C52RC 在本次的试验中采用了STC89C52RC单片机,STC89C52RC单片机是宏晶科技推出的新一代高速/低功耗/超强抗干扰的单片机,指令代码完全兼容传统8051单片机,12时钟/机器周期,工作电压:5.5V~3.3V(5V单片机)/3.8V~2.0V(3V单片机),工作频率范围:0~40MHz,相当于普通8051的0~80MHz,实际工作频率可达48MHz,用户应用程序空间为8K 字节。 (STC89C52RC引脚图)
STC89C52RC单片机的工作模式: (1)典型功耗<0.1μA,可由外部中断唤醒,中断返回后,继续执行原程序(2)空闲模式:典型功耗2mA (3)正常工作模式:典型功耗4Ma~7mA (4)唤醒,适用于水表、气表等电池供电系统及便携设备 2.蜂鸣器及其工作原理: 蜂鸣器按其结构分主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。 接通电源后,振荡器产生的音频信号电流通过电磁线圈,使电磁线圈产生磁场,振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。 本实验采用的是电磁式蜂鸣器。 蜂鸣器按其是否带有信号源又分为有源和无源两种类型。有源蜂鸣器只需要在其供电端加上额定直流电压,其内部的震荡器就可以产生固定频率的信号,驱动蜂鸣器发出声音。无源蜂鸣器可以理解成与喇叭一
简易自控电路大全(1) 在简易自动控制电路中,将介绍一些模拟实验电路,利用一些物理现象产生的力、热、声、光、电信号,实现自动控制,以达到某种控制效果。 磁控和热控电路 在磁力自动控制电路中,传感元件是干簧管,当磁铁靠近时,常开触点闭合而接通传感电路,完成位置传感作用。 能不能用干簧管开关直接控制电动机的转与停呢?玩具电动机是常用的动力装置,它能够把电能转换为机械能,可用于小电风扇转动、小离心水泵抽水等执行功能。通常玩具直流电动机工作电压低,虽然在1.5~3V就可以启动,但起动电流较大(1~2安培),如果用触点负荷仅为几十毫安的干簧管进行开关控制,将大大缩短其使用寿命。因此,在自动控制电路中,常使用电子开关来控制电动机的工作状态。 三极管电子开关电路见图1 。由开关三极管VT,玩具电动机M,控制开关S,基极限流电阻器R和电源GB组成。VT采用NPN型小功率硅管8050,其集电极最大允许电流ICM可达1.5A,以满足电动机起动电流的要求。M选用工作电压为3V的小型直流电动机,对应电源GB亦为3V 。 VT基极限流电阻器R如何确定呢?根据三极管的电流分配作用,在基极输入一个较弱的电流IB,就可以控制集电极电流IC有较强的变化。假设VT电流放大系数hfe≈250,电动机起动时的集电极电流IC=1.5A,经过计算,为使三极管饱和导通所需的基极电流IB≥(1500mA/250)×2=12mA。在图1电路中,电动机空载时运转电流约为500mA,此时电源(用两节5号电池供电)电压降至2.4V,VT基极-发射极之间电压VBE≈0.9V。根据欧姆定律,VT基极限流电阻器的电阻值R=(2.4-0.9)V/12mA≈0.13kΩ。考虑到VT在IC 较大时,hfe要减小,电阻值R还要小一些,实取100Ω。为使电动机更可靠地启动,R甚至可减少到51Ω。在调试电路时,接通控制开关S,电动机应能自行启动,测量VT集电极—发射极之间电压VCE≤0.35V,说明三极管已饱和导通,三极管开关电路工作正常,否则会使VT过热而损坏。 自动灭火的热量自动控制电路见图2。该电路是将图1中的控制开关S换成双金属复片开关ST,就成为热控电路了。当蜡烛火焰烧烤到双金属复片时,复片趋于伸直状态,使得开关ST接通,电动机启动,带动小风扇叶片旋转,对准蜡烛吹风,自动将火焰熄灭;当双金属片冷却后,开关断开,小电风扇自动停转,完成了自动灭火的程序。 自动停车的磁力自动控制电路见图3。开启电源开关S,玩具车启动,行驶到接进磁铁时,安装在VT基极与发射极之间的干簧管SQ闭合,将基极偏置电流短路,VT截止,电动机停止转动,保护了电动机及避免大电流放电。
单片机驱动蜂鸣器原理与设计下面是电磁式蜂鸣器的外形图片及结构图。。。
时,三极管T1截止,没有电流流过线圈,蜂鸣器不发声;当P3.7输出低电平时,三极管导通,这样蜂鸣器的电流形成回路,发出声音。因此,我们可以通过程序控制P3.7脚的电平来使蜂鸣器发出声音和关闭。 程序中改变单片机P3.7引脚输出波形的频率,就可以调整控制蜂鸣器音调,产生各种不同音色、音调的声音。另外,改变P3.7输出电平的高低电平占空比,则可以控制蜂鸣器的声音大小,这些我们都可以通过编程实验来验证。 二、蜂鸣器列子 下面我们举几个简单的单片机驱动蜂鸣器的编程和电路设计的列子。 1、简单的蜂鸣器实验程序:本程序通过在P3.7输出一个音频范围的方波,驱动实验板上的蜂鸣器发出蜂鸣声,其中DELAY延时子程序的作用是使输出的方波频率在人耳朵听觉能力之内的20KHZ以下,如果没有这个延时程序的话,输出的频率将大大超出人耳朵的听觉能力,我们将不能听到声音。更改延时常数,可以改变输出频率,也就可以调整蜂鸣器的音调。大家可以在实验中更改#228为其他值,听听蜂鸣器音调的改变。 ORG 0000H AJMP MAIN ;跳转到主程序 ORG 0030H MAIN: CPL P3.7 ;蜂鸣器驱动电平取反 LCALL DELAY ;延时 AJMP MAIN ;反复循环 DELAY:MOV R7,#228 ;延时子程序,更改该延时常数可以改变蜂鸣器发出的音调 DE1: DJNZ R7,DE1 RET
END 2、倒车警示音实验程序:我们知道各种卡车、货柜车在倒车时候,会发出倒车的蜂鸣警示提示音,同时警示黄灯也同步闪烁,提醒后面的人或车辆注意。本实验例程就实现倒车警示功能,通过实验板上的蜂鸣器发出警示音,同时通过实验板上P1.2和P1.5上的两个黄色发光二极管来发出黄色警示灯。 ORG 0000H AJMP START ;跳转到初始化程序 ORG 0033H START: MOV SP,#60H ;SP初始化 MOV P3,#0FFH ;端口初始化 MAIN: ACALL SOUND ;蜂鸣器发声 ACALL YS500M ;延时 AJMP MAIN SOUND: MOV P1,#11011011B ;点亮2个警示黄色发光二极管 MOV R2,#200 ;响200个周期 SND1: CLR P3.7 ;输出低电平T1导通,蜂鸣器响 ACALL YS1ms ;延时 SETB P3.7 ;输出高电平T1截止,蜂鸣器不响 ACALL YS1ms ;延时 DJNZ R2,SND1 MOV P1,#0FFH ;熄灭黄色警示灯 RET
单片机课程设计报告利用蜂鸣器播放 音乐
课程设计:电子设计 题目名称:音乐流水灯 姓名:戴锦超 学号:08123447 班级:信科12-3班 完成时间: 10月23日 1设计的任务 设计内容:动手焊接一个51单片机
设计目标:利用单片机上的蜂鸣器以及二极管实现音乐播放以及根据音乐的节奏而规律性闪亮的二极管。而且经过程序调节音乐节奏的快慢。 2 设计的过程 2.1 基本结构 1.STC89C52RC 在本次的试验中采用了STC89C52RC单片机,STC89C52RC 单片机是宏晶科技推出的新一代高速/低功耗/超强抗干扰的单片机,指令代码完全兼容传统8051单片机,12时钟/机器周期,工作电压:5.5V~3.3V(5V单片机)/3.8V~2.0V(3V单片机),工作频率范围:0~40MHz,相当于普通8051的0~80MHz,实际工作频率可达48MHz,用户应用程序空间为8K 字节。 (STC89C52RC引脚图)
STC89C52RC单片机的工作模式: (1)典型功耗<0.1μA,可由外部中断唤醒,中断返回后,继续执行原程序 (2)空闲模式:典型功耗2mA (3)正常工作模式:典型功耗4Ma~7mA (4)唤醒,适用于水表、气表等电池供电系统及便携设备 2.蜂鸣器及其工作原理: 蜂鸣器按其结构分主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。接通电源后,振荡器产生的音频信号电流经过电磁线圈,使电磁线圈产生磁场,振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。本实验采用的是电磁式蜂鸣器。 蜂鸣器按其是否带有信号源又分为有源和无源两种类
蜂鸣器是一种一体化结构的电子讯响器,本文介绍如何用单片机驱动蜂鸣器,他广泛应用于计算机、打印机、复印机、报警器、电话机等电子产品中作发声器件。 蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。 电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。接通电源后,振荡器产生的音频信号电流通过电磁线圈,使电磁线圈产生磁场,振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。 压电式蜂鸣器主要由多谐振荡器、压电蜂鸣片、阻抗匹配器及共鸣箱、外壳等组成。多谐振荡器由晶体管或集成电路构成,当接通电源后(1.5~15V直流工作电压),多谐振荡器起振,输出1.5~2.5kHZ的音频信号,阻抗匹配器推动压电蜂鸣片发声。 下面是电磁式蜂鸣器的外形图片及结构图。。。 电磁式蜂鸣器实物图:电磁式蜂鸣器结构示意图: 图 1 图 2 电磁式蜂鸣器内部构成: 1. 防水贴纸 2. 线轴 3. 线圈 5. 底座 6. 引脚 7. 外壳 9. 封胶 10. 小铁片 11. 振动膜
4. 磁铁8. 铁芯12. 电路板 一、电磁式蜂鸣器驱动原理 蜂鸣器发声原理是电流通过电磁线圈,使电磁线圈产生磁场来驱动振动膜发声的,因此需要一定的电流才能驱动它,单片机IO引脚输出的电流较小,单片机输出的TTL电平基本上驱动不了蜂鸣器,因此需要增加一个电流放大的电路。S51增强型单片机实验板通过一个三极管C8550来放大驱动蜂鸣器,原理图见下面图3: S51增强型单片机实验板蜂鸣器驱动原理图: 图3 如图所示,蜂鸣器的正极接到VCC(+5V)电源上面,蜂鸣器的负极接到三极管的发射极E,三极管的基级B经过限流电阻R1后由单片机的P3.7引脚控制,当P3.7输出高电平时,三极管T1截止,没有电流流过线圈,蜂鸣器不发声;当P3.7输出低电平时,三极管导通,这样蜂鸣器的电流形成回路,发出声音。因此,我们可以通过程序控制P3.7脚的电平来使蜂鸣器发出声音和关闭。