
实验二 大林算法实验
1. 实验目的
(1)理解大林算法的基本原理。
(2)掌握大林算法的设计过程。
2. 实验仪器
(1) MATLAB 6.5软件 一套
(2) 个人PC 机 一台
3. 实验原理
在许多控制系统中,特别是过程控制系统中,由于物料能量的传递或能量物质的转换,使系统小的被控制量往往具有纯滞后特性,由自动控制理论可知,滞后特性的存在对自动控制系统是极其不利的,它使系统中控制决策的适应性降低甚至失效,造成控制系统的稳定性下降或者根本不能稳定。
在工业生产中,大多数过程对象含有较大的纯滞后特性。被控对象的纯滞后时间τ使系统的稳定性降低,动态性能变坏,易引起超调和持续振荡。对象的纯滞后特性给控制器的设计带来困难。一般地,当对象的纯滞后时间τ与对象的惯性时间常数m T 之比超过0.5时,采用常规的PID 控制很难获得良好的控制性能。因此,具有纯滞后特性的对象属于比较难以控制的一类对象,对其控制需采用特殊处理方法,即用大林算法可解决此问题。
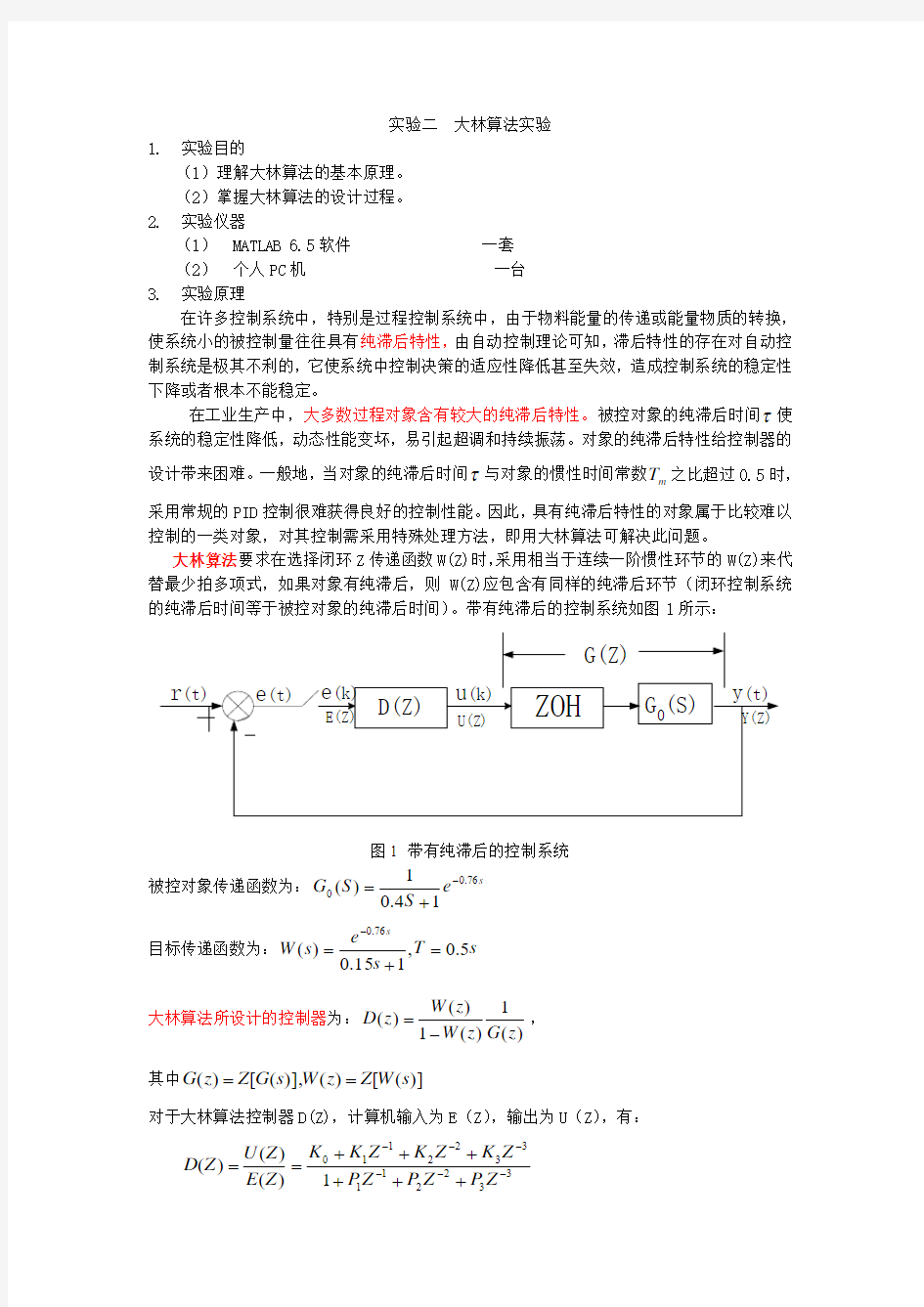
大林算法要求在选择闭环Z 传递函数W(Z)时,采用相当于连续一阶惯性环节的W(Z)来代替最少拍多项式,如果对象有纯滞后,则W(Z)应包含有同样的纯滞后环节(闭环控制系统的纯滞后时间等于被控对象的纯滞后时间)。带有纯滞后的控制系统如图1所示: ZOH D(Z)r (t)e (t)u (k)
y (t)
G 0(S)G(Z)
e (k)
E(Z)U(Z)Y(Z)
图1 带有纯滞后的控制系统
被控对象传递函数为:s e S S G 76.001
4.01)(-+= 目标传递函数为:s T s e s W s
5.0,1
15.0)(76.0=+=- 大林算法所设计的控制器为:)
(1)(1)()(z G z W z W z D -=, 其中)]([)()],([)(s W Z z W s G Z z G ==
对于大林算法控制器D(Z),计算机输入为E (Z ),输出为U (Z ),有:
3322113
3221101)()()(------++++++==Z P Z P Z
P Z K Z K Z K K Z E Z U Z D
将D (Z )式写成差分方程,则有:
3322113221103---------+++=K K K K K K K K U P U P U P E K E K E K E K U 。
式中:K E ~3-K E 误差输入,
四. 实验步骤
1.理解实验原理。
2.采样周期为0.5s ,依据实验给定的控制对象和设定的目标传递函数。借助MATLAB 仿真软件,构造被控对象的传递函数模型,构造被控对象的离散化模型,构造被控对象离散化模型的分子、分母系数;构造目标系统传递函数模型,构造目标系统离散化模型,构造目标系统离散化模型的分子、分母系数;构造大林算法控制器表达式,构造大林算法控制器的分子、分母系数。
3. 调用dalin 算法函数,实现带有纯滞后的控制系统的dalin 控制算法,在阶跃信号作用下,绘制带有纯滞后的控制系统的dalin 控制器输出响应曲线图)(k u 和带有纯滞后的控制系统输出响应曲线图)(k y 。
K U ~3-K U 计算机输出。
五. 实验报告内容
1.在理论分析的基础上,给出dalin 控制算法的详细设计步骤。
2.根据给定的被控对象和目标传递函数,借助MATLAB 仿真软件,编程实现基于该控制系统的dalin 控制算法,画出带有纯滞后的控制系统的dalin 控制器输出响应曲线图)(k u 和带有纯滞后的控制系统输出响应曲线图)(k y 。
3.对照实验图形,分析实验结果,分析带有纯滞后的控制系统的稳定性以及是否有振铃现象产生,并说明原因。
>> G=tf(1,[0.4,1],'inputDelay',0.76);
W=tf(1,[0.15,1],'inputDelay',0.76);
dG=c2d(G,0.5,'zoh');
dW=c2d(W,0.5,'zoh');
dD=[dW/(1-dW)]*(1/dG);
[num1,den1]=tfdata(dG,'v');
[num,den]=tfdata(dD);
[num,den]=tfdata(dD,'V');
dalin(num1,den1,num,den,0.5)
计算机控制技术课程设计2015/2016学年第二学期 设计课题:基于大林算法的炉温控制系统
目录
1 课题简介 课题目的 课程设计是课程教学中的一项重要内容,是达到教学目标的重要环节,是综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义。 《计算机控制系统》是一门理论性、实用性和实践性都很强的课程,课程设计环节应占有更加重要的地位。通过课程设计,加深对学生控制算法设计的认识,学会控制算法的实际应用,使学生从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试工作打下基础。 课题任务 设计以89C51单片机和AD 、DA 驱动电路、控制电路、滤波电路、被控对象电路等电路、由运放电路实现的被控对象构成的计算机单闭环反馈控制系统。 1. 硬件电路设计:89C51最小系统加上模入电路(用ADC0809等)和模出电路(用DAC0832和运放等);由运放实现的被控对象。 2. 控制算法:大林控制算法。 3. 软件设计:主程序、中断程序、A/D 转换程序、大林算法控制程序、D/A 输出程序等。 4.仿真设计:用Matlab 仿真闭环控制系统。 设计要求 1. 模入电路能接受双极性电压输入(-5V~+5V ),模出电路能输出双极性电压(-5V~+5V )。 2. 模入电路用两个通道分别采集被控对象的输出和给定信号。 3. 选择被控对象:G (),3.341 s c e s T s τ-= =+ 4. 对象的纯延迟环节s e τ-用软件通过数组单元移位实现。 5. 定时中断间隔选取50ms ,采样周期T 既要是采样中断间隔的整数倍,又满足 (0.2~1)T τ=。 6. 闭环系统时间常数T τ按倍的被控对象最大时间常数选择。 2 大林算法控制系统方案设计 大林算法总体介绍 + )(r t ) (t e D(Z) U(Z) s e Ts --1G(S) C(T) - 图2-1 大林算法设计的闭环控制系统方框图 在控制系统设计中,纯滞后往往是影响系统动态特性的不利因素,这种系统如果控制器设计不当,常常会引起系统产生大的超调或振荡。对这类系统的控制要求,快速性是次要的,
实验名 称 作业调度 实验内容1、设计可用于该实验的作业控制块; 2、动态或静态创建多个作业; 3、模拟先来先服务调度算法和短作业优先调度算法。 3、调度所创建的作业并显示调度结果(要求至少显示出各作业的到达时间,服务时间,开始时间,完成时间,周转时间和带权周转时间); 3、比较两种调度算法的优劣。 实验原理一、作业 作业(Job)是系统为完成一个用户的计算任务(或一次事物处理)所做的工作总和,它由程序、数据和作业说明书三部分组成,系统根据该说明书来对程序的运行进行控制。在批处理系统中,是以作业为基本单位从外存调入内存的。 二、作业控制块J C B(J o b C o nt r o l Bl o ck) 作业控制块JCB是记录与该作业有关的各种信息的登记表。为了管理和调度作业,在多道批处理系统中为每个作业设置了一个作业控制块,如同进程控制块是进程在系统中存在的标志一样,它是作业在系统中存在的标志,其中保存了系统对作业进行管理和调度所需的全部信息。在JCB中所包含的内容因系统而异,通常应包含的内容有:作业标识、用户名称、用户帐户、作业类型(CPU 繁忙型、I/O 繁忙型、批量型、终端型)、作业状态、调度信息(优先级、作业已运行时间)、资源需求(预计运行时间、要求内存大小、要求I/O设备的类型和数量等)、进入系统时间、开始处理时间、作业完成时间、作业退出时间、资源使用情况等。 三、作业调度 作业调度的主要功能是根据作业控制块中的信息,审查系统能否满足用户作业的资源需求,以及按照一定的算法,从外存的后备队列中选取某些作业调入内存,并为它们创建进程、分配必要的资源。然后再将新创建的进程插入就绪队列,准备执行。 四、选择调度算法的准则 1).面向用户的准则 (1) 周转时间短。通常把周转时间的长短作为评价批处理系统的性能、选择作业调度方式与算法的重要准则之一。所谓周转时间,是指从作业被提交给系统开始,到作业完成为止的这段时间间隔(称
华北电力大学 实验报告| | 实验名称算法设计与分析综合实验 课程名称算法设计与分析 | | 专业班级软件12 学生姓名: 学号:成绩: 指导教师:胡朝举实验日期:
实验一分治策略—归并排序 一、实验要求 (1)编写一个模板函数:template
目录 摘要..................................................... 错误!未定义书签。Abstract................................................... 错误!未定义书签。 1 绪论 (1) 1.1 论文选题背景与意义 (2) 1.2 炉温控制的发展与进步 (3) 2退火电阻炉的结构以及系统介绍 (4) 2.1退火电阻炉结构介绍 (4) 2.2系统建模 (5) 3 控制算法 (7) 3.1 大林算法 (7) 3.2参数确定 (10) 3.3大林算法的途径 (10) 4硬件核心电路部分 (11) 4.1模块的选择与设计 (12) 4.1.1输入模块的选择与设计 (12) 4.1.2输出模块的设计 (13) 4.2系统的抗干扰设计 (14) 5 PID算法对比研究 (15) 6 控制算法仿真设计 (16) 6.1 PID系统仿真 (17) 6.2大林算法系统仿真 (20) 6.3大林算法与PID算法对比仿真 (21) 7扰动状态下的系统性能分析 (22) 结论 (24) 参考文献 (23) 致谢 (24)
摘要 电阻炉对于冶金化工等工业领域应用十分广泛,对于我国的工业生产以及科学研究意义重大,而温度的控制对于电阻炉而言是其核心的关键技术。对于电阻炉的温度控制的精度来说,温度过高或者过低以及不稳定都会对产品生产的质量产生严重的影响,并且也并不利于产品生产的效率,工业上电阻炉的系统是一个纯滞后控制环节,其特点是纯滞后、大惯性以及非线性,使用传统控制方法会使而且多参数进行整定也很难达到我们想要的预期效果,而采用大林算法这一直接的数字设计法来进行对电阻炉的温度控制系统进行控制,使整个闭环系统的传递函数相当于一个延迟环节加上一个惯性环节串联以便实现工业上对于温度的精确要求。 关键词:大林算法;电阻炉;自动控制 Abstract Resistance furnaces are widespread used in industrial spheres such as metallurgical and chemical engineering. They are of great significance for industrial production and scientific research in China, and temperature control is the core technology of resistance furnaces. For the accuracy of temperature control of resistance furnace, too high or too low temperature and instability will have a serious impact on the quality of product production, and also not conducive to the efficiency of product production. For the industrial resistance furnace, the control system is a pure lag control, which is characterized by pure hysteresis, large inertia and nonlinearity. The control method will make the overshoot amount relatively large, the control precision is low, and the adjustment time is long, and it is difficult to guarantee the conditions for processing and production of the product. In the actual production life, people's expectation for the control system is that there is no overshoot or overshoot, especially in the control system with hysteresis. The scheme using the ordinary follower system is definitely not feasible. Use PID. The control method is also not suitable.In the temperature control, the traditional approaches uses the PID method of calculation to dominate, but in the case of the temperature control system of Electric Resistance Furnaces with larger residual Properties, the PID Control has a less trends and static control., and Multi-parameter tuning is also difficult to achieve the desired effect, and the direct digital design method of Dalin
贵州大学计算机科学与技术学院 计算机科学与技术系上机实验报告 课程名称:算法设计与分析班级:软件101 实验日期:2012-10-23 姓名:学号:指导教师: 实验序号:一实验成绩: 一、实验名称 分治算法实验- 棋盘覆盖问题 二、实验目的及要求 1、熟悉递归算法编写; 2、理解分治算法的特点; 3、掌握分治算法的基本结构。 三、实验环境 Visual C++ 四、实验内容 根据教材上分析的棋盘覆盖问题的求解思路,进行验证性实验; 要求完成棋盘覆盖问题的输入、分治求解、输出。有余力的同学尝试消去递归求解。 五、算法描述及实验步骤 分治算法原理: 分治算法将大的分解成形状结构相同的子问题,并且不断递归地分解,直到子问题规模小到可以直接求解。 棋盘覆盖问题描述: 在一个2k x 2k个方格组成的棋盘中恰有一个方格与其他的不同称为特殊方格,想要求利用四种L型骨牌(每个骨牌可覆盖三个方格)不相互重叠覆盖的将除了特殊方格外的其他方格覆盖。
实验步骤: 1、定义用于输入和输出的数据结构; 2、完成分治算法的编写; 3、测试记录结构; 4、有余力的同学尝试不改变输入输出结构,将递归消除,并说明能否不用栈,直接消除递归,为什么? 六、调试过程及实验结果 详细记录程序在调试过程中出现的问题及解决方法。 记录程序执行的结果。
七、总结 对上机实践结果进行分析,问题回答,上机的心得体会及改进意见。 通过对本实验的学习,对分治算法有了进一步的认识,对棋盘覆盖问题和其他分治问题进行了对比。 八、附录 源程序(核心代码)清单或使用说明书,可另附纸 ① #include 1、蒙特卡罗定位 足球机器人中自定位方法是由Fox提出的蒙特卡罗定位。这是一种概率方法,把足球机器人当前位置看成许多粒子的密度模型。每个粒子可以看成机器人在此位置定位的假设。在多数应用中,蒙特卡罗定位用在带有距离传感器的机器人设备上,如激光扫描声纳传感器。只有一些方法,视觉用于自定位。在足球机器人自定位有些不同,因为机器人占的面积相对比较小,但是机器人所在位置的面积必须相当准确的确定,以便允许同组不同机器人交流有关场地物体信息和遵守比赛规则。这种定位方法分为如下步骤,首先所有粒子按照一起那机器人的活动的运动模型移动。概率pi取决于在感知模型的基础上所有粒子在当前传感器上的读数。基于这些概率,就提出了所谓的重采样,将更多粒子移向很高概率的采样位置。概率平均分布的确定用来表示当前机器人的位置的最优估计。最后返回开始。 2、蒙塔卡罗 基本思想 当所求解问题是某种随机事件出现的概率,或者是某个随机变量的期望值时,通过某种“实验”的方法,以这种事件出现的频率估计这一随机事件的概率,或者得到这个随机变量的某些数字特征,并将其作为问题的解。 工作过程 蒙特卡罗方法的解题过程可以归结为三个主要步骤:构造或描述概率过程;实现从已知概率分布抽样;建立各种估计量。 蒙特卡罗方法解题过程的三个主要步骤: (1)构造或描述概率过程 对于本身就具有随机性质的问题,如粒子输运问题,主要是正确描述和模拟这个概率过程,对于本来不是随机性质的确定性问题,比如计算定积分,就必须事先构造一个人为的概率过程,它的某些参量正好是所要求问题的解。即要将不具有随机性质的问题转化为随机性质的问题。 2)实现从已知概率分布抽样 构造了概率模型以后,由于各种概率模型都可以看作是由各种各样的概率分布构成的,因此产生已知概率分布的随机变量(或随机向量),就成为实现蒙特卡罗方法模拟实验的基本手段,这也是蒙特卡罗方法被称为随机抽样的原因。最简单、最基本、最重要的一个概率分布是(0,1)上的均匀分布(或称矩形分布)。随机数就是具有这种均匀分布的随机变量。随机数序列就是具有这种分布的总体的一个简单子样,也就是一个具有这种分布的相互独立的随机变数序列。产生随机数的问题,就是从这个分布的抽样问题。在计算机上,可以用物理方法产生随机数,但价格昂贵,不能重复,使用不便。另一种方法是用数学递推公式产生。这样产生的序列,与真正的随机数序列不同,所以称为伪随机数,或伪随机数序列。不过,经过多种统计检验表明,它与真正的随机数,或随机数序列具有相近的性质,因此可把它作为真正的随机数来使用。由已知分布随机抽样有各种方法,与从(0,1)上均匀分布抽样不同,这些方法都是借助于随机序列来实现的,也就是说,都是以产生随机数为前提的。由此可见,随机数是我们实现蒙特卡罗模拟的基本工具。 (3)建立各种估计量 微型计算机控制技术课程设计报告 班级:自动化901 A B C 一、课题名称 大林算法控制系统设计 二、课程设计目的 课程设计是课程教学中的一项重要内容,是达到教学目标的重要环节,是综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义。 《计算机控制技术》是一门理论性、实用性和实践性都很强的课程,课程设计环节应占有更加重要的地位。计算机控制技术的课程设计是一个综合运用知识的过程,它需要控制理论、程序设计、硬件电路设计等方面的知识融合。通过课程设计,加深对学生控制算法设计的认识,学会控制算法的实际应用,使学生从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试工作打下基础。 三、课程设计内容 已知被控对象的传递函数为: 采样周期为T=0.5s ,用大林算法设计数字控制器D(z),并分析是否会产生振铃现象。 四、课程设计要求 1、用大林算法设计数字控制器D(z) ; 2、在 Simulink 仿真环境画出仿真框图及得出仿真结果,画出数字控制; 3、绘制并分析数字控制器的振铃现象; 4、对振铃现象进行消除; 5、得出仿真结果并进行仿真分析; 6、程序清单及简要说明; 7、成设计说明书(列出参考文献,以及仿真结果及分析)。 五、大林算法控制系统方案设计 在控制系统应用中,纯滞后环节往往是影响系统动态特性的不利因素。工业过程中如钢铁,热工和化工过程中往往会有纯滞后环节。对这类系统,控制器如果设计不当,常常会引起系统的超调和持续振荡。 由于纯延迟的存在,使被控量对干扰、控制信号不能即时的反映。即使调节机构接受控制信号后立即动作,也要经过纯延时间t 后才到达被控量,使得系统产生较大的超调量和较长的调节时间。当t >=0.5T (T 为对象的时间常数)时,实践证明用PID 控制很难获得良好的控制品质。 对这类具有纯滞后环节系统的控制要求,快速性往往是次要的,通常要求系统稳定,要求系统的超调量要小,而调整时间允许在较多的采样周期内结束。 这样的一种大时间滞后系统采用PID 控制或采用最少拍控制,控制效果往往不好。本节介绍能满足上述要求的一种直接数字控制器设计方法 ——达林(Dahlin)算法 ()1s e G s s -=+ 程序设计》课程设计 姓名:王 学号:20100034 班级:软件工程00 班 指导教师:王会青 成绩: 2010年 6 月 实验一.构造可以使n 个城市连接的最小生成树 专业:__软件工程___ 班级:__软件姓名:_王___ 学号:_20100034 完成日期:_2010/6/26 ________ 一、【问题描述】给定一个地区的n 个城市间的距离网,用Prim 算法或Kruskal 算法建立最小生成树,并计算得到的最小生成树的代价。 1 城市间的道路网采用邻接矩阵表示,邻接矩阵的存储结构定义采用课本中给出的定义,若两个城市之间不存在道 路,则将相应边的权值设为自己定义的无穷大值。 2 显示出城市间道路网的邻接矩阵。 3 最小生成树中包括的边及其权值,并显示得到的最小生成树的总代价。 4 输入城市数、道路数→输入城市名→输入道路信息→执行Kruskal 算法→执行Prim 算法→输出最小生成树 二、【问题分析】 1. 抽象数据类型结构体数组的定义: #ifnd ef ADJACENCYMATRIXED// 防止该头文件被重复引用 #define ADJACENCYMATRIXED // 而引起的数据重复定义 #define INFINITY 32767 // 最大值∞ #define MAX_VERTEX_NUM 20 // 最大顶点个数 typedef int VRType; // 权值,即边的值 typedef char InfoType; // 附加信息的类型,后面使用时会定义成一个指针 typedef char VertexType[MAX_VERTEX_NUM]; // 顶点类型 typedef enum {DG=1, DN, UDG, UDN} GraphKind; //{ 有向图,有向网,无向图,无向网} typedef struct ArcCell { VRType adj; //VRType 是顶点关系类型。对无权图,用1 或0 表示相邻否;对带权图,则为权值类型。 InfoType*info; // 该弧关系信息的指针 图1-1 蒙特卡罗方法学习总结 核工程与核技术2014级3班张振华20144530317 一、蒙特卡罗方法概述 1.1蒙特卡罗方法的基本思想 1.1.1基本思想 蒙特卡罗方的基本思想就是,当所求问题的解是某个事件的概率,或者是某个随机变量的数学期望,或者是与概率、数学期望有关的量时,通过某种试验方法,得出该事件发生的频率,或者该随机变量若干个具体观察值的算术平均值,通过它得到问题的解。 1.1.2计算机模拟打靶游戏 为了能更为深刻地理解蒙特卡罗方法的基本思想,我们学习了蒲丰氏问题和打靶游戏两大经典例子。下面主要对打靶游戏进行剖析、计算机模拟(MATLAB 程序)。 设某射击运动员的弹着点分布如表1-1 所示, 首先用一维数轴刻画出已知该运动员的弹 着点的分布如图1-1所示。研究打靶游戏,我 们不用考察子弹的运动轨迹,只需研究每次“扣动扳机”后的子弹弹着点。每一环数对应唯一确定的概率,且注意到概率分布函数有单调不减和归一化的性质。首先我们产生一个在(0,1)上均匀分布的随机数(模拟扣动扳机),然后将该随机数代表的点投到P 轴上(模拟子弹射向靶上的一个确定点),得到对应的环数(即子弹的弹着点),模拟打靶完成。反复进行N 次试验,统计出试验结果的样本均值。样本均值应当等于数学期望值,但允许存在一定的偏差,即理论计算值应该约等于模拟试验结果。 clear all;clc; N=100000;s=0; for n=1:N %step 4.重复N 次打靶游戏试验 x=rand(); %step 1.产生在(0,1)上均匀分布的随机数if(x<=0.1) %step 2.若随机数落在(0.0,0.1)上,则代表弹着点在7环g=7; s=s+g; %step 3.统计总环数elseif(x<=0.2) %step 2.若随机数落在(0.1,0.2)上,则代表弹着点在8环g=8;s=s+g; elseif(x<=0.5) %step 2.若随机数落在(0.2,0.5)上,则代表弹着点在9环g=9;s=s+g; else %step 2.若随机数落在(0.5,1.0)上,则代表弹着点在10环 g=10;s=s+g; end end gn_th=7*0.1+8*0.1+9*0.3+10*0.5; %step 5.计算、输出理论值fprintf('理论值:%f\n',gn_th); gn=s/N; %step 6.计算、输出试验结果 fprintf('试验结果:%f\n',gn);1.2蒙特卡罗方法的收敛性与误差 1.2.1收敛性 由大数定律可知,应用蒙特卡罗方法求近似解,当随机变量Z 的简单子样数N 趋向于无穷大(N 充分大)时,其均值依概率收敛于它的数学期望。 1.2.2误差 由中心极限定理可知,近似值与真值的误差为N Z E Z N αλ<-)(?。式中的αλ的值可以根据给出的置信水平,查阅标准正态分布表来确定。 1.2.3收敛性与误差的关系 在一般情况下,求具有有限r 阶原点矩()∞ 基于Vensim PLE啤酒游戏仿真实验报告 专业班级:工业工程一班 姓名:石洋洋 学号:20100770223 2 基于Vensim PLE啤酒游戏仿真 1.实验报告 2.提交啤酒游戏的因果关系及仿真结果 基于Vensim PLE啤酒游戏仿真实验报告 一、实验目的与要求 1.1实验目的 (1)初步掌握VENSIM软件的仿真模拟过程,认识并了解VENSIM软件 VENSIM是一个建模工具,可以建立动态系统的概念化的,文档化的仿真、分析和优化模型。PLE(个人学习版)是VENSIM的缩减版,主要用来简单化学习动态系统,提供了一种简单富有弹性的方法从常规的循环或储存过程和流程图建立模型。本实验就是运用VENSIM进行系统动力学仿真,进一步加深对系统动力学仿真的理解。 (2)以上机题目所给的啤酒游戏为案例实际操作VENSIM软件进行模拟仿真 运用系统动力学的原理和VENSIM软件构建了啤酒游戏的供应链模型,以及各相关因素之间的因果反馈关系模型。模拟仿真一个供应链流程的运行。从而将系统动力学的知识与软件实际操作融会贯通,更加了解该软件的应用。 (3)通过模拟仿真的结果来分析牛鞭效应 牛鞭效应,就是指当供应链上的各级供应商只根据来自其相邻的下级销售商的需求信息进行供应决策时,需求信息的不真实性会沿着供应链逆流而上,产生逐级放大的现象。 通过增加供应链模型节点个数并对其仿真结果进行分析,证明随着供应链长度的增加,牛鞭效应也愈加明显;对VMI 库存管理模式与传统库存管理模式的系统结构及运营绩效进行了比较,说明供应链成员间的信息共享可以有效地弱化牛鞭效应。 1.2实验要求 啤酒游戏中包含零售商、批发商、供应商三个成员。同时对游戏中的参数进行如下假设:消费者对啤酒的前4周的需求率为300箱/周,在5周时开始随机波动,波动幅度为±200,均值为0,波动次数为100次,随机因子为4个。假设各节点初始库存和期望库存为1000箱,期望库存持续时间为3周,库存调整时间为4周,预测平滑时间为5周,生产延迟时间和运输延迟时间均为3周,且为3阶延迟;不存在订单延迟。仿真时间为0~100周,仿真步长为1周。期望库存等于期望库存持续时间和各节点的销售预测之积。 策略1:不补充以往缺货需求N T I I Q j a j ej j + -= 策略2:考虑以往缺货需求N T I I Q k a fj ej j +-= 根据啤酒游戏基于VENSIM 软件的上级题目要求,分析确立所需建 实验二作业调度 一. 实验题目 1、编写并调试一个单道处理系统的作业等待模拟程序。 作业调度算法:分别采用先来先服务(FCFS,最短作业优先(SJF)、响应 比高者优先(HRN的调度算法。 (1)先来先服务算法:按照作业提交给系统的先后顺序来挑选作业, 先提交的先被挑选。 (2)最短作业优先算法:是以进入系统的作业所提出的“执行时间”为标准, 总是优先选取执行时间最短的作业。 (3)响应比高者优先算法:是在每次调度前都要计算所有被选作业(在后备队列中)的响应比,然后选择响应比最高的作业执行。 2、编写并调度一个多道程序系统的作业调度模拟程序。 作业调度算法:采用基于先来先服务的调度算法。可以参考课本中的方法进 行设计。 对于多道程序系统,要假定系统中具有的各种资源及数量、调度作业时必须考虑到每个作业的资源要求。 二. 实验目的: 本实验要求用高级语言(C语言实验环境)编写和调试一个或多个作业调度的模拟程序,了解作业调度在操作系统中的作用,以加深对作业调度算法的理解 三. 实验过程 < 一>单道处理系统作业调度 1)单道处理程序作业调度实验的源程序: zuoye.c 执行程序: zuoye.exe 2)实验分析: 1、由于在单道批处理系统中,作业一投入运行,它就占有计算机的一切资 源直到作业完成为止,因此调度作业时不必考虑它所需要的资源是否得到 满足,它所占用的CPU时限等因素。 2、每个作业由一个作业控制块JCB表示,JCB可以包含如下信息:作业名、 提交时间、所需的运行时间、所需的资源、作业状态、链指针等等。作业 的状态可以是等待W(Wait)、运行R(Run)和完成F(Finish)三种状态之一 每个作业的最初状态总是等待W 3、对每种调度算法都要求打印每个作业幵始运行时刻、完成时刻、周转时 间、带权周转时间,以及这组作业的平均周转时间及带权平均周转时间 3) 流程图: .最短作业优先算法 三.高响应比算法 图一.先来先服务流程图 4) 源程序: #in elude Romberg龙贝格算法实验报告 2017-08-09 课程实验报告 课程名称: 专业班级: CS1306班学号: U201314967 姓名:段沛云指导教师:报 告日期: 计算机科学与技术学院 目录 1 实验目的 (1) 2 实验原理 (1) 3 算法设计与流程框图 (2) 4 源程序 (4) 5 程序运行 (7) 6 结果分析 (7) 7 实验体会 (7) 1 实验目的 掌握Romberg公式的用法,适用范围及精度,熟悉Romberg算法的流程,并能够设计算法计算积分 31 得到结果并输出。 1x 2 实验原理 2.1 取k=0,h=b-a,求T0= 数)。 2.2 求梯形值T0( b-a ),即按递推公式(4.1)计算T0。 k 2 h [f(a)+f(b)],令1→k,(k记区间[a,b]的二分次2 2.3 求加速值,按公式(4.12)逐个求出T表的第k行其余各元素Tj(k-j) (j=1,2,….k)。 2.4 若|Tk+1-Tk| n-1 11T2n=[Tn+hn∑f(xi+)] 22i=0 1 Sn=T2n+(T2n-Tn) 31 Cn=S2n+(S2n-Sn) 151 Rn=C2n+(C2n-Cn) 63 3 算法设计与流程框图 算法设计:(先假定所求积分二分最大次数次数为20) 3.1 先求T[k][0] 3.2 再由公式T (k)m 4m(k+1)1)=mTm-1-mTm(k-1(k=1,2,) 求T[i][j] 4-14-1 3.3 在求出的同时比较T[k][k]与T[k-1][k-1]的大小,如果二者之差的绝对 值小于1e-5,就停止求T[k][k];此时的k就是所求的二分次数,而此时的T[k][k]就是最终的结果 3.4 打印出所有的T[i][j];程序流程图 先来先服务FCFS和短作业优先SJF进程调度算法 1、实验目的 通过这次实验,加深对进程概念的理解,进一步掌握进程状态的转变、进程调度的策略及对系统性能的评价方法。 2、需求分析 (1) 输入的形式和输入值的范围 输入值:进程个数Num 范围:0 说明本程序中用到的所有抽象数据类型的定义、主程序的流程以及各程序模块之间的层次(调用)关系。 4、详细设计 5、调试分析 (1)调试过程中遇到的问题以及解决方法,设计与实现的回顾讨论和分析 ○1开始的时候没有判断进程是否到达,导致短进程优先算法运行结果错误,后来加上了判断语句后就解决了改问题。 ○2 基本完成的设计所要实现的功能,总的来说,FCFS编写容易,SJF 需要先找到已经到达的进程,再从已经到达的进程里找到进程服务时间最短的进程,再进行计算。 (2)算法的改进设想 改进:即使用户输入的进程到达时间没有先后顺序也能准确的计算出结果。(就是再加个循环,判断各个进程的到达时间先后,组成一个有序的序列) (3)经验和体会 通过本次实验,深入理解了先来先服务和短进程优先进程调度算法的思想,培养了自己的动手能力,通过实践加深了记忆。 6、用户使用说明 (1)输入进程个数Num 蒙特卡罗方法的解题过程可以归结为三个主要步骤:构造或描述概率过程;实现从已知概率分布抽样;建立各种估计量。 蒙特卡罗方法解题过程的三个主要步骤: (1)构造或描述概率过程 对于本身就具有随机性质的问题,如粒子输运问题,主要是正确描述和模拟这个概率过程,对于本来不是随机性质的确定性问题,比如计算定积分,就必须事先构造一个人为的概率过程,它的某些参量正好是所要求问题的解。即要将不具有随机性质的问题转化为随机性质的问题。 (2)实现从已知概率分布抽样 构造了概率模型以后,由于各种概率模型都可以看作是由各种各样的概率分布构成的,因此产生已知概率分布的随机变量(或随机向量),就成为实现蒙特卡罗方法模拟实验的基本手段,这也是蒙特卡罗方法被称为随机抽样的原因。最简单、最基本、最重要的一个概率分布是(0,1)上的均匀分布(或称矩形分布)。随机数就是具有这种均匀分布的随机变量。随机数序列就是具有这种分布的总体的一个简单子样,也就是一个具有这种分布的相互独立的随机变数序列。产生随机数的问题,就是从这个分布的抽样问题。在计算机上,可以用物理方法产生随机数,但价格昂贵,不能重复,使用不便。另一种方法是用数学递推公式产生。这样产生的序列,与真正的随机数序列不同,所以称为伪随机数,或伪随机数序列。不过,经过多种统计检验表明,它与真正的随机数,或随机数序列具有相近的性质,因此可把它作为真正的随机数来使用。由已知分布随机抽样有各种方法,与从(0,1)上均匀分布抽样不同,这些方法都是借助于随机序列来实现的,也就是说,都是以产生随机数为前提的。由此可见,随机数是我们实现蒙特卡罗模拟的基本工具。 (3)建立各种估计量 一般说来,构造了概率模型并能从中抽样后,即实现模拟实验后,我们就要确定一个随机变量,作为所要求的问题的解,我们称它为无偏估计。建立各种估计量,相当于对模拟实验的结果进行考察和登记,从中得到问题的解。 蒙特卡洛法模拟蒲丰(Buffon)投针实验-使用Matlab 2010年03月31日星期三8:47 蒲丰投针实验是一个著名的概率实验,其原理请参见此页: https://www.doczj.com/doc/fe10283458.html,/reese/buffon/buffon.html 现在我们利用Matlab来做模拟,顺便说一下,这种随机模拟方法便是传说中的“蒙特- 作业调度实验报告 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT 实验二作业调度 一.实验题目 1、编写并调试一个单道处理系统的作业等待模拟程序。 作业调度算法:分别采用先来先服务(FCFS),最短作业优先(SJF)、响应比高者优先(HRN)的调度算法。 (1)先来先服务算法:按照作业提交给系统的先后顺序来挑选作业,先提交的先被挑选。 (2)最短作业优先算法:是以进入系统的作业所提出的“执行时间”为标准,总是优先选取执行时间最短的作业。 (3)响应比高者优先算法:是在每次调度前都要计算所有被选作业(在后备队列中)的响应比,然后选择响应比最高的作业执行。 2、编写并调度一个多道程序系统的作业调度模拟程序。 作业调度算法:采用基于先来先服务的调度算法。可以参考课本中的方法进行设计。 对于多道程序系统,要假定系统中具有的各种资源及数量、调度作业时必须考虑到每个作业的资源要求。 二.实验目的: 本实验要求用高级语言(C语言实验环境)编写和调试一个或多个作业调度的模拟程序,了解作业调度在操作系统中的作用,以加深对作业调度算法的理解三 .实验过程 <一>单道处理系统作业调度 1)单道处理程序作业调度实验的源程序: 执行程序: 2)实验分析: 1、由于在单道批处理系统中,作业一投入运行,它就占有计算机的一切资源直到作业完成为止,因此调度作业时不必考虑它所需要的资源是否得到满足,它所占用的 CPU 时限等因素。 2、每个作业由一个作业控制块JCB 表示,JCB 可以包含如下信息:作业名、提交时间、所需的运行时间、所需的资源、作业状态、链指针等等。作业的状态可以是等待W(Wait)、运行R(Run)和完成F(Finish)三种状态之一。每个作业的最初状态总是等待W 。 3、对每种调度算法都要求打印每个作业开始运行时刻、完成时刻、周转时间、带权周转时间,以及这组作业的平均周转时间及带权平均周转时间。 3)流程图: 二.最短作业优先算法 三.高响应比算法 图一.先来先服务流程图 4)源程序: #include <> #include <> #include <> #define getpch(type) (type*)malloc(sizeof(type)) #define NULL 0 int n; float T1=0,T2=0; int times=0; struct jcb .\n",p->name); free(p); .wait...",time); if(times>1000) 代替 代替 课程设计报告课程设计名称共享资源分配与银行家算法 系(部) 专业班级 姓名 学号 指导教师 年月日 目录 一、课程设计目的和意义 (3) 二、方案设计及开发过程 (3) 1.课题设计背景 (3) 2.算法描述 (3) 3.数据结构 (4) 4.主要函数说明 (4) 5.算法流程图 (5) 三、调试记录与分析 四、运行结果及说明 (6) 1.执行结果 (6) 2.结果分析 (7) 五、课程设计总结 (8) 一、程设计目的和意义 计算机科学与技术专业学生学习完《计算机操作系统》课程后,进行的一次全面的综合训练,其目的在于加深催操作系统基础理论和基本知识的理解,加强学生的动手能力.银行家算法是避免死锁的一种重要方法。通过编写一个模拟动态资源分配的银行家算法程序,进一步深入理解死锁、产生死锁的必要条件、安全状态等重要概念,并掌握避免死锁的具体实施方法 二、方案设计及开发过程 1.课题设计背景 银行家算法又称“资源分配拒绝”法,其基本思想是,系统中的所有进程放入进程集合,在安全状态下系统受到进程的请求后试探性的把资源分配给他,现在系统将剩下的资源和进程集合中其他进程还需要的资源数做比较,找出剩余资源能满足最大需求量的进程,从而保证进程运行完成后还回全部资源。这时系统将该进程从进程集合中将其清除。此时系统中的资源就更多了。反复执行上面的步骤,最后检查进程的集合为空时就表明本次申请可行,系统处于安全状态,可以实施本次分配,否则,只要进程集合非空,系统便处于不安全状态,本次不能分配给他。请进程等待 2.算法描述 1)如果Request[i] 是进程Pi的请求向量,如果Request[i,j]=K,表示进程Pi 需要K个Rj类型的资源。当Pi发出资源请求后,系统按下述步骤进行检查: 如果Requesti[j]<= Need[i,j],便转向步骤2;否则认为出错,因为它所需要的资源数已超过它所宣布的最大值。 2)如果Requesti[j]<=Available[j],便转向步骤3,否则,表示尚无足够资源,进程Pi须等待。 3)系统试探着把资源分配给进程Pi,并修改下面数据结构中的数值: Available[j]:=Available[j]-Requesti[j]; Allocation[i,j]:=Allocation[i,j]+Requesti[j]; Need[i,j]:=Need[i,j]-Requesti[j];蒙特卡罗 算法
大林算法课程设计报告
算法程序设计实验报告
蒙特卡罗方法学习总结
基于某Vensim PLE啤酒游戏仿真实验报告材料
作业调度实验报告
Romberg龙贝格算法实验报告.
先来先服务FCFS和短作业优先SJF进程调度算法_实验报告材料
蒙特卡罗方法的解题过程可以归结为三个主要步骤
作业调度实验报告
银行家算法_实验报告
相关主题
文本预览