
第21卷 第2期桂 林 电 子 工 业 学 院 学 报Vo l.21,N o.2 2001年6月JOURNAL OF GUILIN INST ITUTE O F ELECTRO NIC TECHNO LOGY Jun.2001
机构及机械传动系统的非线性动力学研究综述X
杨建明
(桂林电子工业学院机电与交通工程系,广西桂林 541004)
摘 要:介绍了机构和机械传动系统非线性动力学的特点,研究方法以及引起非线性的因素。对连杆机
构,齿轮机构,行星齿轮机构,带传动,以及农机具和其它一些机械领域的非线性动力学模型进行了讨
论,探讨了在这些机械系统中可能出现的复杂运动,如亚谐周期运动和混沌等。
关键词:机构;机械传动;非线性动力学;混沌
中图分类号:O322 文献标识码:A 文章编号:1001-7437(2001)02-42-05
引言
随着现代工业对机械设备及机械传动系统的要求越来越高,机械设备及机械传动系统向着大型化、高速化、轻量化、构件柔性化方向发展。此种情况下,对机械系统的动力学研究显得也越来越重要。由于研究机械系统线性动力学的数学工具易于掌握,方法规范,物理意义明确。而且,在大多数情况下,也能满足精度要求。因此,线性研究方法为大多数研究者所采用,应用广泛。但随着机械运转速度的提高和构件柔性的加大,以及设计制造过程中一些不可避免的因素如间隙、油膜、干摩擦、大变形等的存在,使得在有些情况下,必须考虑系统的非线性。有些物理现象不能用线性系统的理论圆满解释,只能用非线性理论来解释。而且,本质上说,所有的物理系统都是非线性系统,用线性理论去处理,只是一种近似。由于以上原因,对机械系统或机构进行非线性动力学研究成为当前机械动力学领域的一个研究热点,IFTOM M(Inte-national Feder ation for T heor y o f M achines and M echanism s)委员会也把非线性机械动力学列为重点研究领域,并成立了专门的技术委员会以指导、协调各国学者在此领域的研究工作[1]。由于研究非线性动力学要用到高深的数学知识,目前大多数机械动力学研究者对于如何开展机械系统的非线性动力学研究以及非线性动力学的特点并不熟悉。本文的目的正是介绍非线性动力学的特点,研究方法以及机械系统中经常出现的非线性现象,并介绍机构及机械动力学研究的最新进展情况,希望能起到抛砖引玉的作用。
1 非线性动力学的特点
非线性动力学研究的数学和力学基础是非线性数学和非线性振动。非线性振动系统与线性振动系统有本质的区别。在非线性系统中的有些现象无法用线性理论去解释。非线性动力系统的典型特征有如下几点:
(1)在非线性系统中,单频激励可以引起多频响应,在非线性系统中存在着比线性系统复杂得多的共振现象:如亚谐共振、超谐共振、内共振、组合共振等。
(2)当激励频率从高到低或由低到高连续变化时,非线性系统响应的振幅会出现跳跃现象。
(3)阻尼的机理目前尚未研究清楚。在线性理论中,往往将其假设为线性阻尼,这样,系统的响应会随着时间的增长而衰减。而在非线性系统中,当有非线性阻尼时,即使没有外激励的作用,系统有时也会出现周期运动(极限环)。
(4)在线性系统中,只要知道初始条件,就可以确定未来任意时刻的运动状态。而在非线性系统,在一定条件下,会出现“混沌”运动,即使给定初始条件,也无法确定未来任意时刻的状态。
(5)在非线性系统中小而有限的激励可以引起大的运动响应。
X收稿日期:2000-12—10
作者简介:杨建明(1964-),男,河北河间市人,桂林电子工业学院机电与交通工程系高级工程师,天津大学机械工程学院在读博士,主要从事机械动力学、机械CAD/CAM的研究.
在机械系统中引起非线性的因素一般有间隙、构
件大变形、干摩擦等等。
2 非线性动力学的研究方法
在机械系统的非线性动力学研究中经常用到如下的三种研究方法。
2.1 定性方法
定性方法是在相平面内研究非线性动力系统的解的特征和奇点的分布。其理论基础是微分方程的定性分析理论[2]。该方法的优点是能够直观、清楚地显示出解的主要性质和特征;缺点是得不到定量的结果。
2.2 近似解析方法
对非线性微分方程,除极少数特殊情况外,一般都不能得到精确解,也没有统一的求解方法,基本都是采用各种近似方法寻求其近似解。这些方法包括各种摄动方法、多尺度方法、谐波平衡方法、等效线形化方法和三级数方法等[3,4]。在实际求解中,用何种方法需要根据方程的性态而定。
2.3 数值积分方法
定性方法和近似解析方法都只能用于分析单自由度或很少的自由度系统,而对自由度很多的系统,必须使用数值计算方法。即使对单自由度或少自由度系统,有时也需要与数值计算方法结合使用。
在实际应用中,以上三种方法各有所长,经常结合使用。
3 机构及机械系统中的非线性动力学
3.1 连杆机构的非线性动力学
连杆机构动力学中的非线性因素主要有两类:一是运动副的间隙;一是构件的大变形。为了保证运动副元素之间的相对运动,运动副必然有间隙,随着机械的运转,磨损会使间隙增大。而随着机械运转速度的提高,构件弹性变形也会变得不可忽略。
3.1.1 由间隙引起的非线性
处理含运动副间隙的弹性连杆机构的动力学模型大致可分为如下三类:
3.1.1.1 三状态模型
在一个运动周期内,运动副元素之间的相对关系可能为:接触、分离和碰撞,如图1所示。这种模型比
较客观地反映了实际的物理过程,但建模和计算均十分复杂。有关这类模型可参考文献[5,6].
图1 三状态模型
3.1.1.2 二状态模型
这种模型不考虑运动副元素之间的碰撞过程,认为运动副元素之间只存在接触和自由两种状态。这种模型是应用最为广泛的模型,不仅在连杆机构中,在齿轮机构的非线性动力学中也采用这种处理方法[7,8]。这种模型的建模方法可参考文献[9,10]. 3.1.1.3 连续接触模型
鉴于分离和碰撞过程都非常短暂,这种模型只考虑运动副元素之间的接触状态,将运动副间隙视为一个无质量的刚性杆,称为间隙杆。这样,将原来的一自由度机构转化为有多个自由度的机构,只是杆件数目等于原来的杆件数目与运动副间隙数之和。计算方法与无间隙的情况基本相同。
这种模型的特点是建模和计算都相对简单,但由于假设与实际情况相差较大,其计算结果是否能够反映实际系统并没有得到实验的验证。有关这种模型的详细情况可参考文献[11,12].
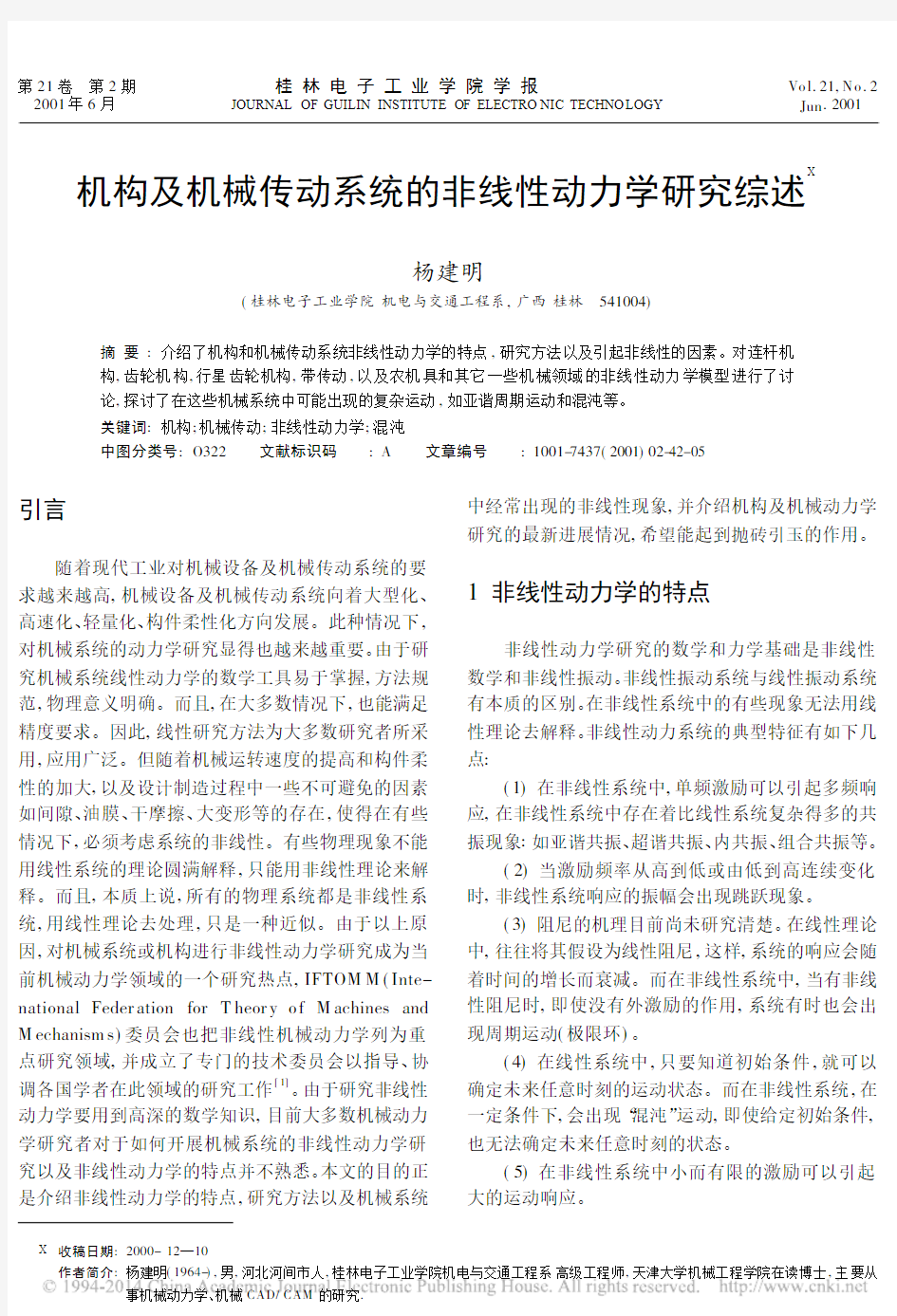
运动副间隙是一种强非线性因素,考虑运动副间隙后,机构的动力学响应相当复杂,在一定条件下会出现混沌运动。图2为文献[13]用计算机仿真得到的
图2 连杆机构的poincar e图
43
第2期 杨建明:机构及机械传动系统的非线性动力学研究综述
连杆机构的poincare 图,由此图可以看出,明显的出现了混沌运动。目前关于含运动副间隙的连杆机构的混吨运动行为的研究仍是机构动力学的一个重要而困难的研究课题。
3.1.2 由构件大变形引起的非线性
当构件的尺度较小,运动速度很高时(高速连杆机构)。构件的弹性变形已不能视为小量。则在动力学模型中,必须考虑构件的弹性变形与刚体位移的耦合项,从而引起非线性响应,文献[14]应用多尺度方法研究了连杆机构由大变形引起的非线性响应,对连杆机构的超谐共振、亚谐共振、分数共振、内共振等进行了详细的研究。利用这种方法可以更深入地解释一些用线性系统理论无法很好解释的物理现象:如低阶谐振现象
[15]
。还可以更深入地认识连杆机构的动力
学本质。有关这方面的内容可参考文献[14,16].3.2 齿轮机构的非线性动力学
齿轮机构是最早进行非线性动力学研究的领域。其主要的非线性因素由两类因素引起,一是齿轮的综合啮合刚度的时变性,是一种参数激励;二是齿侧间隙。
图3为A .Kahram an [7]用的一种模型,应用该模型研究直齿轮的振动时发现直齿轮在轻载情况下会出现各种复杂的运动,如1P 周期运动,2P 周期运动,3P 周期运动,和混沌运动等。图4为文献[7]给出的几个相平面图,从图中可以清楚地看出,其相轨线相互缠绕,似乎杂乱无章,是明显的混沌运动。图5为其po incar e 图。齿轮机构在重载下的振动运动相对简单,几乎都是1P 周期运动,
没有混沌运动。
(a)非线性动力学模型 (b )轮齿啮合刚度
图3 齿轮机构非线性动力学模型
有关齿轮机构非线性动力学的进一步研究可以参看文献[7,8,17],国内的文献则可以参考文献[18].
3.3 行星齿轮机构的非线性动力学
到目前为止,有关行星齿轮机构的非线性动力学
的研究极为有限,国外的研究文献可参考文献[19,20,21],国内这方面没有系统的研究文献发表。由于
图4 齿轮机构的相图
图5 齿轮机构的poincar e 图
行星机构的复杂性,一般只能用计算机进行数值仿真,行星齿轮机构动力学研究的非线性因素有齿轮时变综合啮合刚度,齿侧间隙,轴承配合间隙等。文献[19]的研究证明,在行星齿轮机构中,可以通过将机
构解体后重新装配的方法,实现合理布置齿轮静态传动误差的相位差,从而达到消除一部分动态激励的目的。另一个有意义的结论是在一定条件下,行星机构的均载机构可能恶化机构的动态特性。
行星齿轮机构在一定条件下是否会象普通齿轮机构一样出现复杂的亚谐周期运动或混沌运动,则没有见到公开发表的研究文献,是值得深入研究的课题。
3.4 带传动的非线性动力学
带传动是应用广泛的一种机械传动形式,关于用
44
桂林电子工业学院学报 2001年6月
线性理论研究带传动的动力学行为的文献有很多。但用非线性理论研究其动力学则是近几年才开始的。带传动中的非线性因素主要由带材料的粘弹性引起(材料非线性)。L.Zhang [22]
等系统地研究了带传动的自由振动和强迫振动后得出如下结论:
(1)带传动系统的固有频率和激励频率都依赖于带传动的速度。
(2)当带速低于临界速度时,响应幅值为单值。而当带速超过临界速度时,在同一个带速下有三个响应幅值。即存在跳跃现象,如图6所示。
(3)材料的粘弹性不仅影响振动响应的幅值,而
且影响参数响应的稳定区的边界。
图6
带传动的跳跃现象
图7 松土机构示意图
有关带传动的非线性动力学可参考文献[22,25].
3.5 农机具的非线性动力学
1994年,日本北海道大学的Kenshi Sakai 和东京大学的Kazuyuki Aihara 对轮式拖拉机悬挂式振
图8 松土机构相平面图
动松土铲的混沌振动进行了实验研究[26]。松土机构由拖拉机尾部的动力输出轴带动的空间曲柄-连杆-摇臂铲机构组成,如图7所示。
用时间序列重构相空间吸引子的方法对实验数据进行研究,发现当导轮接地,铲子入土后为周期振动,而导轮离地,铲子入土之前,即当铲子与地面有冲击时为混沌振动,其相轨图如图8所示。
4 讨论与结论
除了本文所介绍的几种机构的非线性动力学外,机械领域中的许多分支的非线性动力学研究也已经开展,如:石油钻机钻杆的运动,混沌振动台,振动筛,切削机床,针式打印机打印头,计算机硬盘驱动器等等。
机械系统的非线性动力学是一个艰深而重要的研究领域,其研究的难度较之线性系统要大得多。既有数学方法上的困难,也有数值计算和几何描述上的困难。但随着研究者对非线性理论的掌握和非线性数学理论的进一步完善,机械系统中越来越多的非线性现象将被认识。
参考文献:
[1] Pu st L and Peterka F,et al.Nonlin ear ocillation in mach ine and
mechanisms theory[J ].M echanis m an d M achine Th eory.1999,(34).
[2] 张芷芬,丁同仁,黄文灶等.微分方程定性理论[M ].北京:科学
出版社,1986.
[3] A .H .奈佛.宋家啸译.摄动方法导论[M ].上海:上海科学技术
45第2期 杨建明:机构及机械传动系统的非线性动力学研究综述
出版社,1984.
[4] 陈予恕编著.非线性振动[M].天津:天津科学技术出版社,
1983.
[5] M iedema B,M ans our W M.M echanical joint w ith clearance:A
three-m od e mode[J].ASM E Journ al of Eng ineering for Indus-tr y,1973,93(3).
[6] Soong K,Th om pson B S.A theoretical an d exper imental inves-
tig ation of the dynam ic respons e of a slide-crank mechanism w ith radial clearance in th e gu dgeon-pin joint[J].ASM E Jou rnal of M echanical Des ign,1990,(2).
[7] Kah raman A,Sin gh R.Non-linear dynam ics of spur gear pair
[J].Journ al of S ound and Vibration,1990,(1).
[8] Kah raman A,Blan ken ship G W.Interactions betw een commen-
surate param etric and for cing excitation in a system w ith clear-ance[J].J ournal of Sound and Vibration,1996,(3).
[9] Funabas hi H,et al.A dynam ic analysis of the plane cran k-an d-
rovker mechanisms w ith clearances[J].Bulletin of th e JSM E, 1980,(177).
[10] Dub ows ky S,Freuden stein F.Dynamic analys is of mech anical
sys tem with clearances,Part I:formation of dynam ic model,
par t II:Dynamic Respon se[J].ASM E Journal of Engineerin g
for Indus try,1971,(3).
[11] Furuhash i T,M orita N,M ats uura M.Research on dynam ics of
fou r-bar linkage w ith clearance at turnin g p airs[J].Bulletin of
the JS M E,1978,21.
[12] Bahg at B M,Os man M O M,Sankar T S.An approach for dy-
nam ic an alys is of mechan ical sys tems with m ultiple clearances
usin g lagrangian mechanics[J].ASM E paper,81-DET-3. [13] 常宗瑜,王玉新,张策.含间隙机构中的混沌现象[J].机械科学
与技术,1998,17(3).
[14] 王玉新.弹性连杆机构的非线性动力学问题研究[D].天津:天
津大学.[15] 张策,黄永强,王子良等著.弹性连杆机构的分析与设计(第二
版)[M].北京:机械工业出版社,1997.
[16] Wang Yux in.Dynamics of an elastic fou r-bar lin kag e m echa-
n ism w ith geometric n on linearitiey[J].N on linear Dynam ics,
1997,(14).
[17] Theodoss iades S and Natsiavas S.Non-linear dynamics of gear-
pair sys tems w ith periodic s tiffness an d backlas h[J].Jour nal fo
Sound an d Vib ration,2000,229(2).
[18] 李润方,王建军.齿轮系统动力学[M].北京:科学出版社,
1997.
[19] Kahraman A.Load sh arin g ch aracteristics of planetary trans-
m issions[J].M ech.And M ach.T heory,1994,29(5).
[20] Kahraman A.Plan etary gear train dynam ics[J].Journ al of
M ech.Design.Trans.OF ASM E,1994,116.
[21] Saada A and Velex P.An Extended model for th e analysis of
th e dynamic behavior of planetary trains[J].J ou rnal of M ech.
Design.T rans.of T he AS M E,1995,117.
[22] Zhang L and Zu J W.Non-linear vibr ation of viscoelas tic m ov-
in g belts,par t I:free vib ration analys is[J].Journal of Sound
and Vibration.1998,216(1).
[23] Zhang L and Zu J W.Non-linear vib ration of vis coelastic m ov-
in g belts,partⅡ:forced vibr ation analys is[J].Journal of
Sound an d Vib ration.1998,216(1).
[24] Kim S K and Lee J M.An alys is of th e non-linear vibration
characteris tics of a belt-driven sys tem[J].J ournal of Sound and
Vibration.1999,223(5).
[25] Ok ubo H and Takano K,et al.Vibration and control of axially
moving b elt sys tem:analysis and experiment by parametric ex-
citation[J].J ou rnal of Vibration and Control,2000,(6). [26] Kens hi Sak ai,Kazuyu ki Aihar a.Nonlinear vibration in an agri-
cultural implemen t s ystem[J].Inter mational J ou rnal of Bifur-
cation an d Ch aos,1994,4(2).
The Non-linear Dynamic Study on Mechanisms and
the Mechanical Tansmission Systems
YAN G J ian-ming
(Dept.o f Electronic M echinery and T raffic Eng ineering,Guilin541004,China)
Abstract:Non-linear dynamic study on the m echanical system is an im po rtant and challeng ing subject at pre-sent.In this paper,the char acteristics of non-linear dynamic sy stems are sho w n and the study m ethods often used in the non-linear dynamic study of mechanical sy stems are intro duced.The factor s,w hich can cause non-linearity in a m echanical system,are listed.T he non-linear dynamic m odel o f some m echanical system such as linkage mechnism,g ear m echanism,planetary m echanism,belt tr ansm issio n and ag ricultural im plements are discussed in detail and the latest prog ress in these fields are also po inted o ut.
Key words:mechanism,mechanical transm issio n,non-linear dynam ics,chaos
46 桂林电子工业学院学报 2001年6月
汽车系统动力学的发展和现状 摘要:近年来,随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容。本文通过对汽车系统动力学的的介绍,对这一新兴学科的发展和现状做一阐述。 关键字:汽车系统动力学动力学响应发展历史 Summary:In recent years, with the rapid development of automobile industry, people on the vehicle comfort, reliability and safety are also put forward higher requirements, to achieve these requirements are related to vehicle system dynamics.Vehicle system dynamics is the study of all related to the movement of the car system discipline, it involves the scope is broad, in addition to the effects of dynamic response of vehicle longitudinal motion and its subsystems, and vehicles to and dynamic content crosswise two aspects in the vertical.Based on the vehicle system dynamics is introduced, the development and status of this emerging discipline to do elaborate. Keywords:Dynamics of vehicle system dynamics Dynamic response Development history 0 引言 车辆动力学是近代发展起来的一门新兴学科。有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。开始出现有关转向、稳定性、悬架方面的文章。同时,人们对轮胎侧向动力学的重要性也开始有所认识。 在随后的20年中,车辆动力学的进展甚微。进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。随后的几十年,汽车制造商意识到行驶平顺性和操纵稳定性在汽车产品竞争中的重要作用,因而车辆动力学得以迅速发展。计算机及应用软件的开发,使建模的复杂程度不断提高。在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。 传统的车辆动力学研究都是针对被动元件的设计而言,而采用主动控制来改变车辆动态性能的理念,则为车辆动力学开辟了一个崭新的研究领域。在车辆系统动力学研究中,采用“人—车—路”大闭环的概念应该是未来的发展趋势。作为驾驶者,人既起着控
机械系统动力学报告 题目:电梯机械系统的动态特性分析 姓名: 专业: 学号:
电梯机械系统的动态特性分析 一、课题背景介绍 随着社会的快速发展,城市人口密度越来越大,高层建筑不断涌现,因此,现在对电梯的提出了更高的要求,随着科技的进步,在满足客观需求的基础上,电梯向着舒适性,高速,高效的方向发展。在电梯的发展过程中,安全性和功能性一直是电梯公司首要考虑的因素,其中舒适性也要包含在电梯的设计中,避免出现速度或者加速度出现突变,或者电梯运行过程中的振动引起人们的不适。因此,在电梯的设计过程中,对电梯进行动态特性分析是十分必要的。 二、在MATLAB中编程、绘图。 通过同组小伙伴的努力,已经得到了该系统的简化模型与运动方程。因此进行编程: 该系统的微分方程:[][][]{}[]Q x k x c x M= + ? ? ? ? ? ? + ? ? ? ? ? ?? ? ? ,其中矩阵[M]、 [C]、[K]、[Q]都已知。 该系统的微分方程是一个二阶一元微分方程,在MATLAB中,提供有求解常微分方程数值解的函数,其中在MATLAB中常用的求微分方程数值解的有7个:ode45,ode23,ode113,ode15s,ode23s,ode23t,ode23tb 。 ode是MATLAB专门用于解微分方程的功能函数。该求解器有变步长(variable-step)和定步长(fixed-step)两种类型。不同类型有着不同的求解器,其中ode45求解器属于变步长的一种,采用Runge-Kutta
算法;和他采用相同算法的变步长求解器还有ode23。 ode45表示采用四阶,五阶Runge-Kutta单步算法,截断误差为(Δx)^3。解决的是Nonstiff(非刚性)常微分方程。 ode45是解决数值解问题的首选方法,若长时间没结果,应该就是刚性的,可换用ode23试试。 Ode45函数调用形式如下:[T,Y]=ode45(odefun,tspan,y0) 相关参数介绍如下: 通过以上的了解,并对该微分方程进行变换与降阶,得出程序。MATLAB程序: (1)建立M函数文件来定义方程组如下: function dy=func(t,y) dy=zeros(10,1); dy(1)=y(2); dy(2)=1/1660*(-0.006*y(2)+0.003*y(4)-0.0006*y(10)-1.27*10^7*y(1)+1.27*10^7*y (3)+2.54*10^6*y(9)); dy(3)=y(4); dy(4)=1/1600*(+0.03*y(2)-0.007*y(4)+0.003*y(6)+1.27*10^7*y(1)-7.274*10^8*y(3 )+1.27*10^7*y(5)); dy(5)=y(6);
转子动力学是固体力学的一个分支。本文主要研究转子支承系统在旋转状态下的振动,平衡和稳定性,特别是在接近或超过临界转速的情况下转子的横向振动。转子是涡轮机,电动机和其他旋转机械的主要旋转部件。 200多年来,工程和科学界一直关注转子振动。w.j.m. 1869年英格兰的兰金(Rankin)和1889年法国的拉瓦尔(c.g.p.de Laval)对挠性轴的测试是研究此问题的先驱。随着现代工业的发展,高速细长转子逐渐出现。由于它们通常在柔性状态下工作,因此它们的振动和稳定性变得越来越重要。转子动力学的主要研究内容如下: ①临界速度 由于制造误差,转子每个微小部分的质心与旋转轴略有偏离。当转子旋转时,由上述偏差引起的离心力将使转子产生横向振动。在某些速度(称为临界速度)下,这种振动似乎非常强烈。为了确保机器不会在工作速度范围内产生共振,临界速度应适当偏离工作速度,例如大于10%。临界速度与转子的弹性和质量分布有关。对于具有有限集总质量的离散旋转系统,临界速度的数量等于集总质量的数量;对于具有连续质量分布的弹性旋转系统,临界速
度是无限的。传递矩阵法是计算大型转子支撑系统临界转速的最常用数值方法。要点是:首先,将转子分成几个部分,每个部分左右两端的四个部分参数(挠度,挠度角,弯矩和剪切力)之间的关系可以通过传递来描述。该部分的矩阵。以此方式,可以获得系统的左端和右端的横截面参数之间的总传递矩阵。然后,根据边界条件和自然振动中非零解的条件,通过试错法求出各阶的临界速度,得到相应的振动模式。 ②通过临界速度的状态 通常,转子以可变速度通过临界速度,因此通过临界速度的状态是不稳定的。与以临界速度旋转时的静止状态不同,有两个方面:一是振幅的最大值小于静止状态的振幅,速度越大,振幅的最大值越小。另一个是振幅的最大值不会在像静止状态那样的临界速度下出现。在不稳定状态下,频率转换干扰力作用在转子上,这使分析变得困难。为了解决这种问题,在数值计算或非线性振动理论中必须使用渐近法或级数展开法。 ③动态响应
1. 绝对节点坐标法 传统有限元方法建立的单元为非等参数单元,其使用节点处的位移梯度来描述物体的无限小的转动,但在物体发生大变形时,节点处的位移梯度已不能准确描述物体的转动变形,从而极大影响到计算的精度。 Shabana [1]提出了绝对节点坐标法(Absolute nodal coordinate formulation, ANCF ),其理论基础主要是有限元和连续介质力学理论。该方法将物体的单元节点坐标定义在全局坐标系下,使用节点处的斜率(slope)矢量作为节点坐标而不是节点处的无限小转动[2],不需要另外计算刚体位移与柔性变形之间的耦合,能较精确地计算大变形的多体系统动力学问题。其最终推导出的多体系统的微分代数方程组(DAEs )中,质量矩阵是一个常数矩阵,但刚度矩阵将是一个非线性的时间函数。 1.1梁单元的绝对节点坐标法 Shabana 首先推导出一维梁单元的绝对节点坐标法模型[1][3]。在这种模型中,梁单元用中性轴来简化,如图1所示,其上面任意一点P 在全局坐标系下的坐标表达为: 23101232320123r =Se r a a x a x a x r b b x b x b x ??+++??==????+++???? 图1 其中,x 为沿轴线的单元局部坐标,[]0,x l ∈,l 为梁单元初始长度;S 为单元形函数;e 为含有8个单元节点坐标的广义坐标矢量。 123456781102205162e []|,|,|,|, T x x x l x l e e e e e e e e e r e r e r e r ========= 1 2 1 2 304078,,,x x x l x l r r r r e e e e x x x x ====????====????
非线性动力学 非线性系统之一瞥——Lorenz系统 2013-01-30
0 前言 0.1非线性系统动力学 线性系统是状态变量和输出变量对于所有可能的输入变量和初始状态都满足叠加原理的系统;非线性系统就是这些量不满足叠加原理的系统。非线性系统在日常生活和自然界中不胜枚举,也远远多于线性系统。 非线性动力学是研究非线性系统的各种运动状态的定性和定量变化规律,尤其是系统的长时期行为。研究的对象主要有分叉、混沌和孤立子等。 0.2洛伦兹方程 洛伦兹方程是美国气象学家洛伦兹在模拟天气这一非周期性现象时确定,这个方程的三个变量分别模拟温度、湿度和压力。可以得出结论,初期微小的差别随着时间推移差别会越来越大,洛伦兹基于此提出长期的天气预报是不可能的。这也被视为研究非线性混沌理论的开始,所以洛伦兹系统在研究非线性系统中具有举足轻重的地位。本文借助洛伦兹系统对非线性进行简单的介绍。洛伦兹方程如下。 方程中,、和都为实参数。实参不同,系统的奇点及数目也是不同的。
1 奇点和稳定性 1.1 奇点 洛伦兹系统含有三个实参数,当参数变化,奇点的数目可能不同。首先,一定是系统的奇点。时,当时,系统仅有一个奇点;当时,系统还有另外两个奇点。 下面仅解时的两个非原点奇点。令 方程第一式得,第三式可得,将两式代入第二式得 即,。 1.2 奇点稳定性判别 下面根据Liapunov稳定性判别方法,找出系统在原点处大围渐进稳定的条件,取Liapunov函数。考虑,的情况。则有 将洛伦兹方程 代入上式,可得 变换为二次型,系数矩阵为
已知,,则系数矩阵负定的条件是。所以该系统是大围渐进稳定的条件是,前提是,。 Liapunov函数V总是存在的,只要构造出合适的Liapunov函数,就可以通过Liapunov稳定性定理直接判断奇点的稳定性,而不需要求解非线性方程组。有的Liapunov函数不易构造,则可以通过奇点处导算子的特征值来判断:若所有的特征值实部都小于0,则方程组在该奇点是局部渐进稳定的;若特征值实部至少有一个为正,该奇点是不稳定的。仍以洛伦兹系统为例,求出导算子的特征值。 特征矩阵的行列式(特征方程)为 特征值 显然,当,时,,,要使方程在原点处渐进稳定,必须小于0,因此 两边同时平方可得 因此
第十四章 机械系统动力学 14-11、在图14-19中,行星轮系各轮齿数为123z z z 、、,其质心与轮心重合,又齿轮1、2对质心12O O 、的转动惯量为12J J 、,系杆H 对的转动惯量为H J ,齿轮2的质量为2m ,现以齿轮1为等效构件,求该轮系的等效转动惯量J ν。 2222 2121221 12323121 13212 1 13222 12311212213121313 ( )()()()1()()()( )()()()o H H H o H J J J J m z z z z z z z z z O O z z z z z z z O O J J J J m z z z z z z z z νννωωω ωωωω ωω ωωωωνω=+++=-= += +=+-=++++++解: 14-12、机器主轴的角速度值1()rad ?从降到时2()rad ?,飞轮放出的功 (m)W N ,求飞轮的转动惯量。 max min 122 2 121 ()2 2F F Wy M d J W J ?ν??ωωωω==-=-? 解: 14-15、机器的一个稳定运动循环与主轴两转相对应,以曲柄和连杆所组成的转动副A 的中心为等效力的作用点,等效阻力变化曲线c A F S ν-如图14-22所示。等效驱动力a F ν为常数,等效构件(曲柄)的平均角速度值25/m rad s ?=, 3 H 1 2 3 2 1 H O 1 O 2
不均匀系数0.02δ=,曲柄长度0.5OA l m =,求装在主轴(曲柄轴)上的飞轮的转动惯量。 (a) W v 与时间关系图 (b )、能量指示图 a 2 24()2 3015m Wy=25N m 25 6.28250.02 c va OA vc OA OA va F W W F l F l l F N Mva N J kg m νν=∏?∏=∏+==∏= =?解:稳定运动循环过程 14-17、图14-24中各轮齿数为12213z z z z =、,,轮1为主动轮,在轮1上加力矩1M =常数。作用在轮 2 上的阻力距地变化为: 2r 22r 020M M M ??≤≤∏==∏≤≤∏=当时,常数;当时,,两轮对各自中心的转动惯量为12J J 、。轮的平均角速度值为m ω。若不均匀系数为δ,则:(1)画出以轮1为等效构件的等效力矩曲线M ν?-;(2)求出最大盈亏功;(3)求飞轮的转动惯量F J 。 图14-24 习题14-17图 40Nm 15∏ 12.5∏ 22.5∏ 15Nm ∏ 2∏ 2.5∏ 4∏ 25∏ 1 1 z 2 z 2 r M 2 M ∏ 2∏ 2?
系统动力学与案例分析 一、系统动力学发展历程 (一)产生背景 第二次世界大战以后,随着工业化的进程,某些国家的社会问题日趋严重,例如城市人口剧增、失业、环境污染、资源枯竭。这些问题范围广泛,关系复杂,因素众多,具有如下三个特点:各问题之间有密切的关联,而且往往存在矛盾的关系,例如经济增长与环境保护等。 许多问题如投资效果、环境污染、信息传递等有较长的延迟,因此处理问题必须从动态而不是静态的角度出发。许多问题中既存在如经济量那样的定量的东西,又存在如价值观念等偏于定性的东西。这就给问题的处理带来很大的困难。 新的问题迫切需要有新的方法来处理;另一方面,在技术上由于电子计算机技术的突破使得新的方法有了产生的可能。于是系统动力学便应运而生。 (二)J.W.Forrester等教授在系统动力学的主要成果: 1958年发表著名论文《工业动力学——决策的一个重要突破口》,首次介绍工业动力学的概念与方法。 1961年出版《工业动力学》(Industrial Dynamics)一书,该书代表了系统动力学的早期成果。 1968年出版《系统原理》(Principles of Systems)一书,论述了系统动力学的基本原理和方法。 1969年出版《城市动力学》(Urban Dynamics),研究波士顿市的各种问题。 1971年进一步把研究对象扩大到世界范围,出版《世界动力学》(World Dynamics)一书,提出了“世界模型II”。 1972年他的学生梅多斯教授等出版了《增长的极限》(The Limits to Growth)一书,提出了更为细致的“世界模型III”。这个由罗马俱乐部主持的世界模型的研究报告已被翻译成34种语言,在世界上发行了600多万册。两个世界模型在国际上引起强烈的反响。 1972年Forrester领导MIT小组,在政府与企业的资助下花费10年的时间完成国家模型的研究,该模型揭示了美国与西方国家的经济长波的内在机制,成功解释了美国70年代以来的通货膨胀、失业率和实际利率同时增长的经济问题。(经济长波通常是指经济发展过程中存在的持续时间为50年左右的周期波动) (三)系统动力学的发展过程大致可分为三个阶段: 1、系统动力学的诞生—20世纪50-60年代 由于SD这种方法早期研究对象是以企业为中心的工业系统,初名也就叫工业动力学。这阶段主要是以福雷斯特教授在哈佛商业评论发表的《工业动力学》作为奠基之作,之后他又讲述了系统动力学的方法论和原理,系统产生动态行为的基本原理。后来,以福雷斯特教授对城市的兴衰问题进行深入的研究,提出了城市模型。 2、系统动力学发展成熟—20世纪70-80年代 这阶段主要的标准性成果是系统动力学世界模型与美国国家模型的研究成功。这两个模型的研究成功地解决了困扰经济学界长波问题,因此吸引了世界范围内学者的关注,促进它在世界范围内的传播与发展,确立了在社会经济问题研究中的学科地位。 3、系统动力学广泛运用与传播—20世纪90年代-至今 在这一阶段,SD在世界范围内得到广泛的传播,其应用范围更广泛,并且获得新的发展.系统动力学正加强与控制理论、系统科学、突变理论、耗散结构与分叉、结构稳定性分析、灵敏度分析、统计分析、参数估计、最优化技术应用、类属结构研究、专家系统等方面的联系。许多学者纷纷采用系统动力学方法来研究各自的社会经济问题,涉及到经济、能源、交通、环境、生态、生物、医学、工业、城市等广泛的领域。 (四)国内系统动力学发展状况 20世纪70年代末系统动力学引入我国,其中杨通谊,王其藩,许庆瑞,陶在朴,胡玉奎等专家学者是先驱和积极倡导者。二十多年来,系统动力学研究和应用在我国取得飞跃发展。我国成立国内系统动力学学会,国际系统动力学学会中国分会,主持了多次国际系统动力学大会和有关会议。 目前我国SD学者和研究人员在区域和城市规划、企业管理、产业研究、科技管理、生态环保、海洋经济等应用研究领域都取得了巨大的成绩。 二、系统动力学的原理 系统动力学是一门分析研究信息反馈系统的学科。它是系统科学中的一个分支,是跨越自然科学和社会科学的横向学科。系统动力学基于系统论,吸收控制论、信息论的精髓,是一门认识系统问题和解决系统问题交叉、综合性的新学科。从系统方法论来说,系统动力学的方法是结构方法、功能方法和历史方法的统一。 系统动力学是在系统论的基础上发展起来的,因此它包含着系统论的思想。系统动力学是以系统的结构决定着系统行为前提条件而展开研究的。它认为存在系统内的众多变量在它们相互作用的反馈环里有因果联系。反馈之间有系统的相互联系,构成了该系统的结构,而正是这个结构成为系统行为的根本性决定因素。
太原理工大学研究生试题 姓名: 学号: 专业班级: 机械工程2014级 课程名称: 《机械系统动力学》 考试时间: 120分钟 考试日期: 题号 一 二 三 四 五 六 七 八 总分 分数 1 圆柱型仪表悬浮在液体中,如图1所示。仪表质量为m ,液体的比重为ρ,液体的粘性阻尼系数为r ,试导出仪表在液体中竖直方向自由振动方程式,并求固有频率。(10分) 2 系统如图2所示,试计算系统微幅摆动的固有频率,假定OA 是均质刚性杆,质量为m 。(10分) 3 图3所示的悬臂梁,单位长度质量为ρ,试用雷利法计算横向振动的周期。假定梁的 变形曲线为?? ? ?? -=x L y y M 2cos 1π(y M 为自由端的挠度)。(10分) 4 如图4所示的系统,试推导质量m 微幅振动的方程式并求解θ(t)。(10分) 5 一简支梁如图5所示,在跨中央有重量W 为4900N 电机,在W 的作用下,梁的静挠度δst=,粘性阻尼使自由振动10周后振幅减小为初始值的一半,电机n=600rpm 时,转子不平衡质量产生的离心惯性力Q=1960N ,梁的分布质量略去不计,试求系统稳态受迫振动的振幅。(15分) 6 如图6所示的扭转摆,弹簧杆的刚度系数为K ,圆盘的转动惯量为J ,试求系统的固有频率。(15分) 7如图7一提升机,通过刚度系数m N K /1057823?=的钢丝绳和天轮(定滑轮)提升货载。货载重量N W 147000=,以s m v /025.0=的速度等速下降。求提升机突然制动时的钢丝绳最大张力。(15分) 8某振动系统如图8所示,试用拉个朗日法写出动能、势能和能量散失函数。(15分) 太原理工大学研究生试题纸
2013 “非线性振动” 练习题 1、简述绘制相轨线的原理及其作用。 2、用小参数摄动法求 )1(220<<=+εεωx x x x 的一阶近似解。 3、 用多尺度法或均值法求 (第三章16) )1(320<<=+εεωx x x 的一阶近似解。 4、 用多尺度法求周期激励范德波尔方程 0)0(,)0(,cos )1(220220=-+=+-=+x F A x t F x x x x ω ωωεω 的非共振解。 5、 设运动微分方程为 )1(cos 220<<+-=+εωεωt F x x x 试求0ωω≈的主共振解。 6、 简述非线性单自由度保守系统自由振动的主要特点及与线性系 统的区别。 7、 简述非线性单自由度系统在简谐激励下的强迫振动特点。 8、 简述自激振动产生的主要原因及其特点。 9、 以两自由度非线性系统为例,简述非线性多自由度系统振动的 主要特点。 10、 简述分岔和混沌的概念。(考试从中选取5题)
1、简述绘制相轨线的原理及其作用。 答:绘制相轨迹线的原理如下: 将系统的动力学方程... +(x,)=0x f x 转化为以状态变量表示的状态方程组 ..==-(x,y) y x y f (1) 在利用上式消去微分dt,得到y x 和的关系式 ,=-dy f dx y (x y ) (2) 这个式子所确定的平面(x,y )上的各点的向量场,就构成了相轨迹族。 绘制相轨迹线的方法有两种,第一是等倾线法。等倾线法的原理如下,令方程(2)右边等于常数C ,得到(x,y)相平面内以C 为参数的曲线族 (x,y)+Cy=0f (3) (3)称作相轨迹的等倾线族,族内每一曲线上的所有点所对应的由方程(2)确定的向量场都指向同一方向。 第二种方法是李纳法。其原理如下: 适当选择单位使弹簧的系数为1,设单位质量的阻尼力为-(y)?,则有f(x,y)=x+(y)?。相轨迹微分方程为 +(y)=-dy x dx y ? (4) 在平面上做辅助曲线=-(y)x ? 。此辅助曲线即上述零斜率等倾线,过某个相点 P (x,y )作x 轴的平行线与辅助曲线交与R 点,再过R 点作y 轴的平行线与x 轴交于S 点,连接PS ,将向量PS → 逆时针旋转90度后的方向就是方程(4)确定的相轨迹切线方向。 相轨迹线可以帮助我们定性地了解系统在不同初始条件下的运动全貌。当系统是强非线性振动的时候,近似解析法(如小参数摄动法,多尺度法)不再适用,此时可以采用相轨迹法来研究。(相轨迹线的作用) 非线性动力学主要研究非线性振动系统周期振动规律(振幅,频率,相位的变化规律)和周期解的稳定条件。其研究内容主要有:保守系统中的稳定性及轨道扩散问题;振动的定性理论;非线性振动的近似解析方法;非线性振动中混沌的控制和同步问题;随机振动系统和参数振动系统问题等。
图4 机器安装示意图 88、一个质量20Kg 的机器,按图4所示方式安装。若弹簧的总刚度 为17KN/m ,总阻尼为300m s N ?。试求初始条mm x 250=,s mm x 3000= 时的振动响应。 88、解:由0=++kx x c x m 代入数据后得 08501501017300203=++=?++x x x x x x (8分) 其中,152=a ,8502=n ω,计算阻尼比和固有圆频率 17.2826.012.291126.02 .295.722=-?=-=<===ζωωωζn d n a (4分) 将初始条件代入 00020020arctan )(ax x x ax x x A d d +=++= ω?ω (4分) 得: o d d ax x x mm ax x x A 3.555.25.730017.2825arctan arctan )(4.30)17.2825.7300(25)(0002220020?+?=+==?++=++= ω?ω(2分)
则系统的振动响应为 4. 305.7+ =-t x t(2分)e sin( 28 ) 96 .0 . 17
1. “机械动力学”主要研究哪些内容,请以任一机器为对象举例说明研究内容及其相互关系。 答:机械动力学是研究机械在力的作用下的运动和机械在运动中产生的力,并从力与运动的相互作用的角度进行机械设计和改进的科学。动力学主要研究内容概括起来有:1,共振分析;2,振动分析与动载荷计算;3,计算机与现代测试技术的运用;4,减震与隔振。柴油机上的发动机,发动机不平衡时会产生很强的地面波,从而产生噪声,而承受震动的结构,发动机底座,会由于振动引起的交变应力而导致材料的疲劳失效,而且振动会加剧机械零部件的磨损,如轴承和齿轮的磨损等,并使机械中的紧固件如螺母等变松。在加工时还会导致零件加工质量变差。通过对共振的研究和分析,使机械的运转频率避免共振区,避免机械共振事故的发生,通过振动分析与动载荷计算可以求出在外力作用下机械的真实运动,运用计算机和现代测试技术对机械的运行状态进行检测,以及故障诊断,模态分析以及动态分析,现实中机器运转时由于各种激励因素的存在,不可避免发生振动,为了减小振动,通常在机器底部加装弹簧,橡胶等隔振材料。 2.简述在刚性运动前提下,如何进行运动构件的真实运动分析求解(请列出步骤)? 答:首先建立等效力学模型,将复杂的机械系统简化为一个构件,即等效构件,根据质点系动能定理,将作用于机械系统上的所有外力和外力矩、所有构件的质量和转动惯量,都向等效构件转化;其次计算等效构件上的等效量(包括等效力矩,等效力,等效质量,等效转动惯量);再次建立等效构件的运动方程式,有两种形式,能量形式和力矩形式;最后通过方程式求出等效构件的角速度函数和角加速度函数,这样便可以求出机械系统的真实运动规律。 3.在弹性运动假设下,有哪些弹性动力学建模方法,各有什么特点?请解释“瞬时刚化” 的概念。) 答:弹性动力学模型有集中参数模型和有限元模型。集中参数模型建立起的运动方程为常微分方程,但是由于质量简化过多,模型粗糙,精度比较差;有限元建立的运动方程也为常微分方程,但相较集中参数模型精确,适应性广,可以模拟复杂形状的构件,运算模型统一。瞬时刚化:机构在运动到循环中的某一位置时,可将机构的形状和作用在其上的载荷瞬时冻结起来,从而可瞬时的将机构看做一个刚体结构。
综述 ——系统动力学研究现状摘要: 回顾了系统动力学的国内外发展历程,特别是对20世纪90年代以来,系统动力学在宏观领域、项目管理领域、学习型组织领域、物流与供应链领域所取得的成果进行了综述。最后指出了在基于主体的建模,心智模型、制订动态决策与学习,组织和社会的进化等理论领域和模拟软件等技术领域系统动力学未来面临的挑战和发展方向。 通过对国内外系统动力学研究的文献进行梳理,明确系统动力学理论研究、方法研究以及应用研究的研究体系,并在此基础上指出系统动力学研究趋势。为促进系统动力学方法的广泛应用和深入研究,综述了当前国内外系统动力学应用的主要研究成果,讨论了未来系统动力学方法的应用方向。 首先评述了系统动力学在国外的发展历程及应用情况; 然后从预测、管理、优化与控制3个方面对国内系统动力学的应用研究现状进行评述,并着重从装备规模优化与控制、装备保障过程控制、装备全寿命费用管理与控制、作战效能分析与评估、作战行动指挥模拟等方面,分析了系统动力学方法在我国军事、武器和战略领域的应用研究情况; 最后指出分析装备价格及其特性之间的内在关系等是未来系统动力学方法的应用方向,探讨了系统动力学方法在寿命周期费用技术领域中的应用前景。 关键词:系统动力学、研究体系、研究综述、应用现状
引言 系统动力学自创立以来,其理论、方法和工具不断完善,应用方向日益扩展,在处理工业、经济、生态、环境、能源、管理、农业、军事等诸多人类社会复杂问题中发挥了重要作用。随着现代社会复杂性、动态性、多变性等问题的逐步加剧,更加需要像系统动力学这样的方法,综合系统论、控制论、信息论等,并与经济学交叉,使人们清晰认识和深入处理产生于现代社会的非线性和时变现象,作出长期的、动态的、战略性的分析与研究[1]。这为系统动力学方的进一步发展提供了广阔的平台,也为深入研究系统动力学的应用提供了机遇和挑战。 为此,本文从系统动力学应用研究现状入手,通过总结和分析当前系统动力学的应用情况,探寻系统动力学未来的应用前景和方向,希望能促进系统动力学方法在现代社会中的广泛应用。 一、国内系统动力学的应用研究现状 20世纪70年代末系统动力学引入我国。1986年国内成立系统动力学学会筹委会,1990年正式成立国际系统动力学学会中国分会,1993 年正式成立中国系统工程学会系统动力学专业委员会。在30多年时间里,系统动力学经过杨通谊先生、王其藩教授、许庆瑞教授和胡玉奎、陶在朴、贾仁安等一代代专家学者的积极倡导和潜心研究,取得了飞跃发展。 至今,国内系统动力学应用领域几乎涉及人类社会与自然科学的所有领域。其中,水土资源、农林、生态领域,宏观、区域经济、可
机械系统动力学试题 一、 简答题: 1.机械振动系统的固有频率与哪些因素有关?关系如何? 2.简述机械振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。 3.简述无阻尼单自由度系统共振的能量集聚过程。 4. 简述线性多自由度系统动力响应分析方法。 5. 如何设计参数,使减振器效果最佳? 二、 计算题: 1、 单自由度系统质量Kg m 10=, m s N c /20?=, m N k /4000=, m x 01.00=, 00=? x ,根据下列条件求系统的总响应。 (a ) 作用在系统的外激励为t F t F ωcos )(0=,其中N F 1000=, s rad /10=ω。 (b ) 0)(=t F 时的自由振动。 2、 质量为m 的发电转子,它的转动惯量J 0的确定采用试验方法:在转子径向R 1的地方附加一小质量m 1。试验装置如图2所示,记录其振动周期。 a )求发电机转子J 0。 b )并证明R 的微小变化在R 1=(m/m 1+1)·R 时有最小影响。 3、 如图3所示扭转振动系统,忽略阻尼的影响 J J J J ===321,K K K ==21 (1)写出其刚度矩阵; (2)写出系统自由振动运动微分方程; (2)求出系统的固有频率; (3)在图示运动平面上,绘出与固有频率对应的振型图。 1 θ(图2)
(图3) 4、求汽车俯仰振动(角运动)和跳振(上下垂直振动)的频率以及振 动中心(节点)的位置(如图4)。参数如下:质量m=1000kg,回转半径r=0.9m,前轴距重心的距离l1=0.1m,后轴距重心的距离l2=1.5m,前弹簧刚度k1=18kN/m,后弹簧刚度k2=22kN/m (图4) 5、如5图所示锻锤作用在工件上的冲击力可以近似为矩形脉冲。已知 工件,铁锤与框架的质量为m1=200 Mg,基础质量为m2=250Mg,弹簧垫的刚度为k1=150MN/m,土壤的刚度为k2=75MN/m.假定各质量的初始位移与速度均为零,求系统的振动规律。
1.2.1 齿轮系统动力学研究 从齿轮动力学的研究发展来看,先后进行了基于解析方法的非线性齿轮动力学研究、基于数值方法的齿轮非线性动力学研究、基于实验方法的齿轮系统的非线性动力学研究和考虑齿面摩擦及齿轮故障的齿轮系统的非线性动力学研究。其中,解析方法包括谐波平衡法、分段技术法和增量谐波平衡法等;数值方法则不胜枚举,包括Ritz法、Parametric Continuation Technique方法等。[1]齿轮系统间隙非线性动力学的研究起始于1967年K.Nakamura的研究。[2]在1987年,H. Nevzat ?zgüven等人对齿轮系统动力学的数学建模方法进行了详细的总结。他分别从简化的动力学因子模型、轮齿柔性模型、齿轮动力学模型、扭转振动模型等几个方面分类,详细总述了齿轮动力学的发展进程。[3]1990年,A. Kaharman等人分析了一对含间隙直齿轮副的非线性动态特性,考虑了啮合刚度、齿侧间隙和静态传递误差等内部激励的影响,考察了啮合刚度与齿侧间隙对动力学的共同影响。[4] 1997年,Kaharaman和Blankenship对具有时变啮合刚度、齿侧间隙和外部激励的齿轮系统进行了实验研究,利用时域图、频域图、相位图和彭家莱曲线等揭示了齿轮系统的各种非线性现象。[5]同年,M. Amabili和A. Rivola研究了低重合度单自由度的直齿轮系统的稳态响应及其系统的稳定性。 [6]2004年,A. Al-shyyab等人用集中质量参数法建立了含齿侧间隙的直齿齿轮副的非线性动力学模型,利用谐波平衡阀求解了方程组的稳态响应,并研究了啮合刚度、啮合阻尼、静态力矩和啮合频率对齿轮系统振动的影响。[7]2008年,Lassaad Walha等人建立了两级齿轮系统的非线性动力学模型,考虑了时变刚度、齿侧间隙和轴承刚度对动力学的影响。对非线性系统分段线性化并用Newmark迭代法进行求解,研究了齿轮脱啮造成的齿轮运动的不连续性。[8]2010年,T. Osman 和Ph. Velex在齿轮轻微磨损的情况下,建立了动力学模型,通过数值模拟揭示了齿轮磨损的非对称性。[9]2011年,Marcello Faggioni等人通过分析直齿轮的非线性动力学特性及其响应,建立了以齿轮振动幅值的目标函数,利用Random–Simplex优化算法优化了齿廓形状。[10]2013年,Omar D. Mohammed等人对时变啮合刚度的齿轮系统动力学进行了研究,对于裂纹过长所带来的有限元误差问题,提出了一种新的时变啮合刚度模型。通过时域方面的故障诊断数据和FEM结果对比,证明了新模型能够更好地解长裂纹问题。[11] 国内研究齿轮系统动力学也进行了大量的研究。2001年,李润芳等人建立了具有误差激励和时变刚度激励的齿轮系统非线性微分方程,利用有限元法求得齿轮的时变啮合刚度和啮合冲击力,研究了齿轮系统在激励作用下的动态响应。 [12]2006年,杨绍普等人研究了考虑时变刚度、齿轮侧隙、啮合阻尼和静态传递误差影响下的直齿轮副的非线性动力学特性,利用增量谐波平衡法对系统方程进行了求解,研究了系统的分岔特性以及阻尼比和外激励大小对系统幅频曲线的影响。[13]2010年,刘国华等人建立了考虑齿轮轴的弹性、齿侧间隙、油膜挤压刚度和时变啮合刚度等因素的多体弹性非线性动力学模型,研究了齿廓修形和轴的扭转刚度对动力学特性的影响。[14] 2013年,王晓笋,巫世晶等人建立了含有非线性齿侧间隙、内部误差激励和含磨损故障的时变啮合刚度的三自由度齿轮传动系统平移—扭转耦合动力学方程。采用变步长Gill积分、GRAM—SCHMIDT方法,得到了系统对应的分岔图和李雅普诺夫指数谱,研究发现了系统内部丰富的非线性现象,而系统进入混沌运动的途径也是多样的。[15]
分数阶非线性系统动力学特性及其图像处理应用研究 非线性动力学在自然学科、社会学科、工程技术等诸多领域有着广泛的应用。而将非线性动力学理论引入图像处理领域,是非线性动力学理论应用的新思路,也是图像处理的新手段。 本文以分数阶非线性动力学和同步控制为理论基础,研究分析了新的非线性动力学特性,探索其与图像处理领域的契合点,在此基础上构建基于非线性动力学特性的图像处理模型。新模型的构建拓宽了非线性理论的应用领域,可为人脑感知系统的内部机制提供新的解释和预测,在图像处理领域和神经动力学方面都具有较好的理论意义和应用前景。 本文的主要工作及创新点包括以下几个方面:(1)基于分数阶蔡氏系统和变形蔡氏系统,构建了复分数阶(时滞)蔡氏系统和分数阶复变形蔡氏系统,利用相图、分岔图、最大Lyapunov指数等定性和定量的手段对两类复系统的动力学行为进行了分析讨论。首先将分数阶微积分定义扩展到复数阶,得到复数阶微积分定义的计算方法,并将其用于复分数阶(时滞)蔡氏系统的仿真。 对于分数阶复变形蔡氏电路系统的研究是将复系统转化为6变量的实系统实现的。在对两类系统的动力学行为分析中,通过改变系统阶次,观察到不同周期窗口、分岔、单涡卷等丰富的动力学行为。 最后讨论了两类复系统动力学行为的异同点及分数阶系统的动力学行为与构建图像处理模型之间的关系。(2)基于分数阶系统稳定性分析理论,研究了分数阶Relaxation振子对于不同外部刺激的稳定域和振荡域,结合相图、分岔图分析得到其产生的振荡为节律振荡;利用节律振荡特性构建图像增强模型,并用实验验证了新模型在图像增强方面的有效性。
首先利用分数阶稳定性理论分析分数阶Relaxation振子在不同外部刺激时其平衡点的稳定性,进而分析其对应的相图、分岔图,确定使分数阶Relaxation 振子产生节律振荡的外部刺激的范围。根据不同外部刺激使系统产生节律振荡的特性,构建了类Gamma曲线(QGC)。 将QGC和其相近模型进行比较,量化指标和直观效果均验证了我们所提模型在图像增强方面有较好的性能。另外,此模型模拟的增强机制也可能是人类视觉系统实现自动适应外界光线条件的机制。 (3)基于分数阶混沌系统的主动控制方法和分时同步策略,实现了单个分数 阶系统与多个分数阶复杂子网络的分时相同步。利用该方案构建了含中枢单元的两层图像目标选择模型,并用实验验证了该模型的可行性。 引入分数阶主动控制策略和分时同步思想,通过线性关系将子网络转化为混合系统,实现了单个混沌系统与子网络(混合系统)间的分时相同步。然后利用该方案构建包括中枢单元和分割单元两层的目标选择模型。 分割层是由相互耦合的分数阶神经元组成,通过相同步实现不同目标物的分割。中枢单元由一个振子构成,通过分时主动控制策略在不同时段与代表不同目标物的混合系统达到相同步,实现目标的选择与转移。 另外,此模型也是对人类视觉系统中目标物选择和转移机制一个很好的解释。 (4)基于分数阶系统的稳定性理论,实现了1+N分数阶复变量节点的复杂网络不 同系数的函数投影同步方案。 将此函数投影同步方案用于构建图像分形特征的识别模型,仿真结果验证了该模型的可行性。首先,构建了1+N节点(复混沌系统)驱动响应复杂网络模型。 根据分数阶系统稳定性理论,设计合理的控制器,实现了分数阶1+N节点复
系统动力学研究综述 摘要 本文首先对系统动力学进行简要概述,并回顾其在国外和国内的发展历程。其次通过对文献综述的方式,对系统动力学的研究领域进行梳理和罗列,并且介绍了系统动力学的研究成果和应用情况。本文的目的在于对系统动力学的发展和应用进行清洗明确的概括的,增进系统动力学的了解,并表述其目前的发展趋势。 关键词:系统动力学、综述、应用现状、研究成果 一、引言 系统动力学自创立以来,其理论、方法和工具不断完善,应用范围不断拓展,在解决经济、社会、环境、生态、能源、农业、工业、军事等诸多领域的复杂问题中发挥了重要作用。随着现代社会复杂性、动态性、多变性等问题的逐步加剧,更加需要类似系统动力学这样的方法,综合系统论、控制论、信息论等,并于经济学、管理学交叉,使人们清晰认识和深入处理产生于现代社会的非线性和时变现象,做出长期的、动态的、战略的分析和研究。这位系统动力学方法的进一步发展提供了广阔的平台,也为深入研究系统动力学的应用提供了机遇和挑战。 为此,本文从系统动力学的研究与应用现状着手,通过总结和分析当前系统动力学的应用情况,探寻系统动力学未来的应用前景和方向,希望能促进系统动力学方法在现代社会中的广泛应用。 二、系统动力学概述 系统动力学(System Dynamics,简称SD)起源于控制论。自Wienes在40年代建立控制论以来,随着现代工业与科学技术的日益发展,控制论的概念、领域和工具也得以拓展。五十年代初,中国把自动控制理论翻译为“自动调节原理”。苏联的B.B. COJIOJIOBHNKOB教授,在研究有关随即控制问题时,引入“系统动力学”的概念。钱学森先生结合龚恒问题,编著了《工程控制论》,也阐述了系统动力学的有关问题。苏联与后总共对系统动学的研究,是针对工程技术问题,限于自然科学领域。美国在50年代后期,在系统动力学方面取得了很大的突破。
《机械动力学》期末复习题及答案1、判断 1.机构平衡问题在本质上是一种以动态静力分析为基础的动力学综合,或动力学设计。 答案:正确 2.优化平衡就是采用优化的方法获得一个绝对最佳解。 答案:错误 3.惯性力的计算是建立在主动构件作理想运动的假定的基础上的。 答案:正确 4.等效质量和等效转动惯量与机械驱动构件的真实速度无关。 答案:正确 5.作用于等效构件上的等效力(或等效力矩)所作的功等于作用于系统上的外力所作的功。答案: 错误 6.两点动代换后的系统与原有系统在静力学上是完全等效的。 答案:错误 7.对于不存在多余约束和多个自由度的机构,动态静力分析是一个静定问题。 答案:错误 8.摆动力的完全平衡常常会导致机械结构的简单化。 答案:错误 9.机构摆动力完全平衡的条件是:机构运动时,其总质心作变速直线运动。 答案:错误 10.等效质量和等效转动惯量与质量有关。 答案:错误 11.平衡是在运动设计完成之前的一种动力学设计。 答案:错误 12.在动力分析中主要涉及的力是驱动力和生产阻力。 答案:正确 13.当取直线运动的构件作为等效构件时,作用于系统上的全部外力折算到该构件上得到等效力。答案:正确 14.摆动力的平衡一定会导致机械结构的复杂化。 答案:错误 15.机器人操作机是一个多自由度的闭环的空间机构。 答案:错误 16.质量代换是将构件的质量用若干集中质量来代换,使这些代换质量与原有质量在运动学上等效答案:正确 17.弹性动力分析考虑构件的弹性变形。 答案:正确 18.机构摆动力矩完全平衡的条件为机构的质量矩为常数。 答案:错误
19.拉格朗日方程是研究约束系统静力动力学问题的一个普遍的方法。 答案:正确 20.在不含有变速比传动而仅含定速比传动的系统中,传动比为常数。 答案:正确 21.平衡分析着眼于全部消除或部分消除引起震动的激振力。 答案:正确 22.通路定理是用来判断能否实现摆动力完全平衡的理论。 答案:错误 23.无论如何,等效力与机械驱动构件的真实速度无关。 答案:正确 24.综合平衡不仅考虑机构在机座上的平衡,同时也考虑运动副动压力的平衡和输入转矩的平衡。答案:正确 25.速度越快,系统的固有频率越大。 答案:错误 26.平衡的实质就是采用构件质量再分配等手段完全地或部分地消除惯性载荷。 答案:正确 27.优化综合平衡是一个多目标的优化问题,是一种部分平衡。 答案:正确 28.机构摆动力完全平衡的条件为机构的质量矩为常数。 答案:正确 29.当以电动机为原动机时,驱动力矩是速度的函数。 答案:错误 30.为了使得等效构件的运动与机构中该构件的运动一致,要将全部外力等效地折算到该机构上这 一折算是依据功能原理进行的。 答案:正确 2、单选 1.动力学反问题是已知机构的(),求解输入转矩和各运动副反力及其变化规律。 A.运动状态 B.运动状态和工作阻力 C.工作阻力 D.运动状态或工作阻力 答案:B 2.平衡的实质就是采用构件质量再分配等手段完全地或部分地消除()。 A.加速度 B.角加速度 C.惯性载荷 D.重力 答案: C 3.摆动力的完全平衡常常会导致机械结构的()。 A.简单化