
ABB机器人简单操作指南
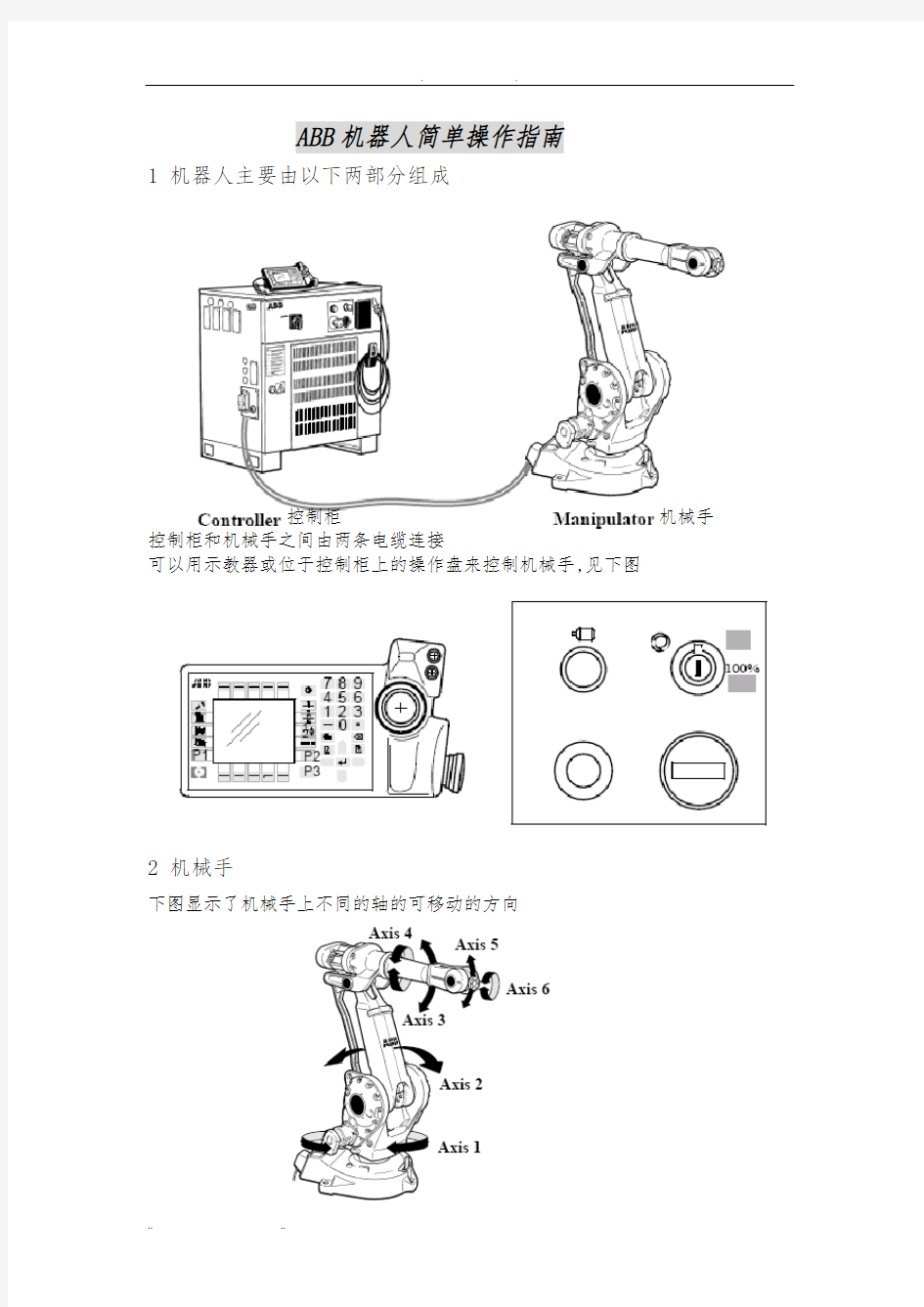
1 机器人主要由以下两部分组成
控制柜机械手控制柜和机械手之间由两条电缆连接
可以用示教器或位于控制柜上的操作盘来控制机械手,见下图
2 机械手
下图显示了机械手上不同的轴的可移动的方向
3 控制柜
下图显示了控制柜的主要部分
示教器
操作盘主开关
驱动磁盘
4 操作盘
下图描述了操作盘的功能
电机开按钮及指示灯操作模式选择开关
急停,如果按下请拉出来工作时间计数器,显示机械
手的工作时
间
电机开
在电机开状态,机器人的电机被激活,Motors On按钮保持常亮.
常亮准备执行程序
快速闪烁(4Hz) 机器人没有校准或选择计数器没有更新.电机已经打开.
慢速闪烁(1Hz)一个保护停机被激活,电机关闭.
工作模式自动 (生产模式)
在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人
工作模式手动减速运行 (程序模式)
在机器人工作区域里面对其编程时候.也用于在电机关状态设置机器人.
工作模式手动全速 (选择,测试模式)
用来在全速情况下运行程序
急停
当按下按钮时,无论机器人处于什么状态都立即停止.要重新启动需将按钮恢复工作时间计数器
显示机械手工作的时间
5 示教器
见下图
控制运行
使能设备
显示屏
控制杆
急停按钮手动慢速运行:打开手动慢速运行窗口
编程: 打开编程及测试窗口
输入/输出:打开输入输出窗口,用来手动操作输入输出信号
其它:打开其它窗口如系统参数,维护,生产及文件管理窗口.
停止: 停止程序执行
对比度: 调节显示屏的对比度
菜单键: 按下后显示包含各种命令的菜单
功能键: 按下后直接选择各种命令
动作单元: 按下后手动慢速运行机器人或其它机械元件
动作形式: 按下后选择怎样手动慢速运行机器人,再定位或直线
动作形式: 轴-轴移动. 1=轴1-3, 2=轴4-6
增加: 增加手动慢速运行开/关
列表: 按下后将指针从一个窗口移到另一个窗口(通常由双画线分开)
返回/翻页: 按下翻页或返回上级菜单
删除: 删除选中的参数
确认: 按下输入数据
上下键: 上下移动指针
左右键: 左右移动指针
编程键: 怎样定义这些键,见第10章,系统参数-示教器
5.2 窗口操作
本节讲述如何进行窗口操作,下面举例说明如何操作输入/输出窗口
按下打开输入/输出窗口
I/O窗口将被打开,如下图所示.显示的I/O清单将会随定义的信号及I/O板的不
一样而不同
A: 菜单键
B: 窗口名称
C: I/O列表名
D: I/O列表
E: 功能键
F: 行数
G: 指针
当数字输出被选中后,可通过功能键改变其状态,可以通过几种方法在列表中移动
指针
移动选择
上移一行上移箭头
下移一行下移箭头
至顶行从编辑菜单至第一行
至末行从编辑菜单到最后一行
翻页下页
上页至上页
在列表中选定一个指定的行
从编辑Edit菜单跳到指定行:键入
行号然后按OK
窗口有时候被一条双划线分开,当一个输出被选中后,将出现两个功能键
A-双划线 B-功能键
有时可以在不同的窗口之间移动指针,而要在不同窗口之间移动,需按
在示教器上有四个窗口键,见下图