
15.1 力法:超静定次数的确定
本章主要介绍超静定结构的计算方法——力法。介绍如何选择力法的基本结构、建立力法典型方程,以求出超静定结构的内力图。重点掌握力法的基本原理、基本结构的选择方法和力法解超静定结构的三方面因素。同时对一些特殊结构,如:对称结构、两铰拱等也作了基本的介绍。
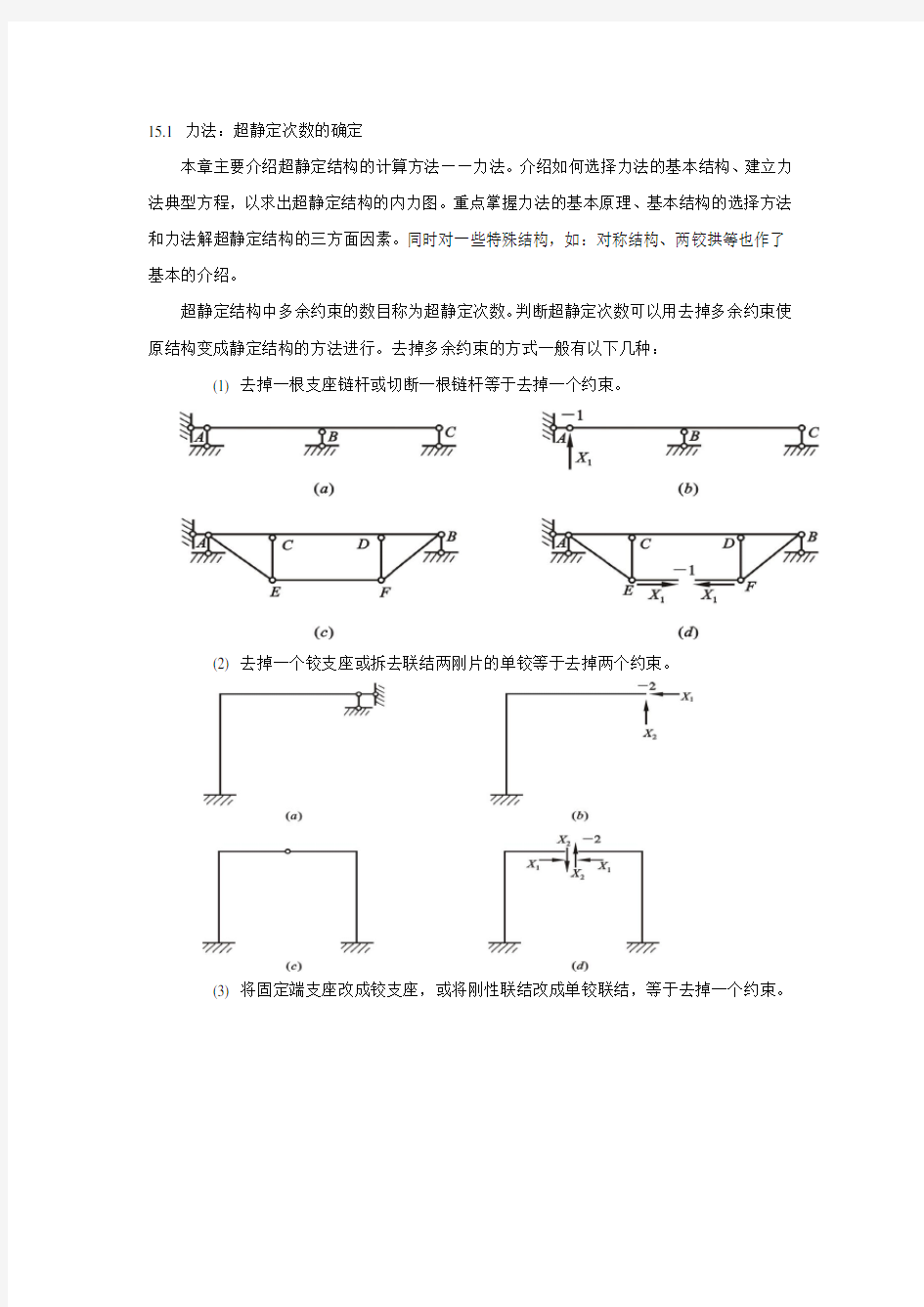
超静定结构中多余约束的数目称为超静定次数。判断超静定次数可以用去掉多余约束使原结构变成静定结构的方法进行。去掉多余约束的方式一般有以下几种:
(1) 去掉一根支座链杆或切断一根链杆等于去掉一个约束。
(2) 去掉一个铰支座或拆去联结两刚片的单铰等于去掉两个约束。
(3) 将固定端支座改成铰支座,或将刚性联结改成单铰联结,等于去掉一个约束。
(4) 去掉一个固定端支座或切开刚性联结等于去掉三个约束。
按所去掉的约束数目可以很简便地算出结构的超静定次数。如从原结构中去掉n 个约束结构就成为静定的,则原结构称为n次超静定结构。
15.2.1 力法的基本原理
图19.7(a)所示为一次超静定梁,EI为常数。图中虚线表示梁在受力后的弹性变形情况。由图中可见梁A端的线位移及角位移为零,B端竖向位移也为零。现拆去多余约束B端的支座链杆并用多余未知力X1代替B端的约束对原结构的作用,得到如图19.7(b)所示静定梁。这种去掉多余约束后所得到的静定结构,称为原结构的基本结构,待求的多余未知力X1为力法的基本未知量。
基本结构在B端不再受约束限制,因此在外力P作用下B点竖向位移向下(图19.7(c)),在X1作用下B点竖向位移向上(图19.7(d))。显然在二者共同作用下B点竖向位移将随X1的大小不同而异,由于X1是取代了被拆去约束对原结构的作用,因此基本结构的变形位移状态应与原结构完全一致,即B点的竖向位移Δ1必须为零,也就是说基本结构在已知荷载
与多余未知力X1共同作用下;在拆除约束处沿多余未知力X1作用方向产生的位移应与原
结构在X1方向的位移相等。即 Δ1=0 (a) 这就是基本结构应满足的变形谐调条件,又称位移条件。
若用Δ1P 和Δ11分别表示荷载q 和多余未知力X1单独作用下基本结构在X1作用处沿X1方向产生的位移,则由叠加原理根据位移条件可得下列方程
Δ1=Δ11+Δ1P=0
(b)
若X1=1时在X1方向产生的位移为δ11,则有Δ11=δ11X1,于是(b)
式可以写成
δ11X1+Δ1P=0
(19.1)
这就是求解多余未知力的补充方程,称为力法方程。
为了计算δ11和Δ1P ,分别作基本结构在荷载q 作用下的弯矩图MP(图19.8(a))和在单位力X1=1作用下的单位弯矩图M1(图19.8(b))
,应用图乘法可得
代入力法方程式(19.1)得
多余未知力X1求得后,即可由静力平衡条件求得其余的约束反力和内力。最后弯矩图也可以利用已经绘出的基本结构的M1图和MP
图由叠加原理按下式求得
M=M1X1+MP
也就是将M1图的竖标乘以X1倍,再与MP 图中的对应竖标相加。例如
MA=MAX1+MAP=l ×
3/8ql-1/2ql2
=-1/8ql2 (上侧受拉)
最后内力图如图19.9所示。 综上所述,我们把这种取多余未知力作为基本未知量,通过基本结构,利用计算静定结构的位移,达到求解超静定结构的方法,称为力法。
用力法计算超静定结构时,解除超静定结构的多余约束而得到静定的基本结构后,整个计算过程自始至终都是在基本结构上进行的,这就把超静定结构的计算问题,转化为静定结构的位移和内力计算问题。
321111112()233l M dx l l l EI EI EI δ==??=?24111113()3248P P ql ql M M dx l l l EI EI EI
?==-???=-?3421130388l ql X X ql EI EI -== 得
图19.7
图19.8
图19.8