
智能机器人的语音识别
语音识别概述
最近,由于其重大的理论意义和实用价值,语音识别已经受到越来越多的关注。到现在为止,多数的语音识别是基于传统的线性系统理论,例如隐马尔可夫模型和动态时间规整技术。随着语音识别的深度研究,研究者发现,语音信号是一个复杂的非线性过程,如果语音识别研究想要获得突破,那么就必须引进非线性系统理论方法。最近,随着非线性系统理论的发展,如人工神经网络,混沌与分形,可能应用这些理论到语音识别中。因此,本文的研究是在神经网络和混沌与分形理论的基础上介绍了语音识别的过程。
语音识别可以划分为独立发声式和非独立发声式两种。非独立发声式是指发音模式是由单个人来进行训练,其对训练人命令的识别速度很快,但它对与其他人的指令识别速度很慢,或者不能识别。独立发声式是指其发音模式是由不同年龄,不同性别,不同地域的人来进行训练,它能识别一个群体的指令。一般地,由于用户不需要操作训练,独立发声式系统得到了更广泛的应用。所以,在独立发声式系统中,从语音信号中提取语音特征是语音识别系统的一个基本问题。
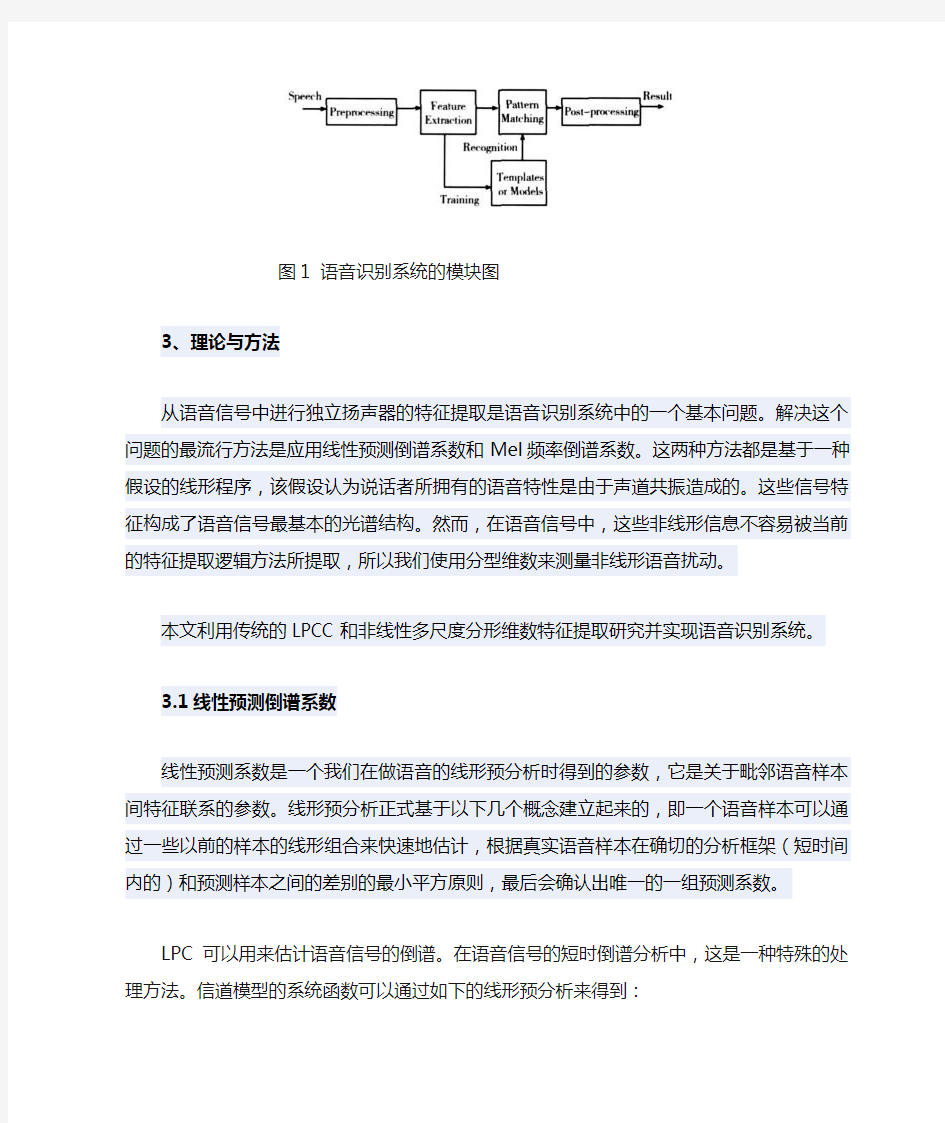
语音识别包括训练和识别,我们可以把它看做一种模式化的识别任务。通常地,语音信号可以看作为一段通过隐马尔可夫模型来表征的时间序列。通过这些特征提取,语音信号被转化为特征向量并把它作为一种意见,在训练程序中,这些意见将反馈到HMM的模型参数估计中。这些参数包括意见和他们响应状态所对应的概率密度函数,状态间的转移概率,等等。经过参数估计以后,这个已训练模式就可以应用到识别任务当中。输入信号将会被确认为造成词,其精确度是可以评估的。整个过程如图一所示。
图1 语音识别系统的模块图
3、理论与方法
从语音信号中进行独立扬声器的特征提取是语音识别系统中的一个基本问题。解决这个问题的最流行方法是应用线性预测倒谱系数和Mel频率倒谱系数。这两种方法都是基于一种假设的线形程序,该假设认为说话者所拥有的语音特性是由于声道共振造成的。这些信号特征构成了语音信号最基本的光谱结构。然而,在语音信号中,这些非线形信息不容易被当前的特征提取逻辑方法所提取,所以我们使用分型维数来测量非线形语音扰动。
本文利用传统的LPCC和非线性多尺度分形维数特征提取研究并实现语音识别系统。
3.1线性预测倒谱系数
线性预测系数是一个我们在做语音的线形预分析时得到的参数,它是关于毗邻语音样本间特征联系的参数。线形预分析正式基于以下几个概念建立起来的,即一个语音样本可以通过一些以前的样本的线形组合来快速地估计,根据真实语音样本在确切的分析框架(短时间内的)和预测样本之间的差别的最小平方原则,最后会确认出唯一的一组预测系数。
LPC可以用来估计语音信号的倒谱。在语音信号的短时倒谱分析中,这是一种特殊的处理方法。信道模型的系统函数可以通过如下的线形预分析来得到:
其中p代表线形预测命令,,(k=1,2,… …,p)代表预测参数,脉冲响应用
h(n)来表示,假设h(n)的倒谱是。那么(1)式可以扩展为(2)式:
将(1)带入(2),两边同时,(2)变成(3)。
就获得了方程(4):
那么可以通过来获得。
(5)中计算的倒谱系数叫做LPCC,n代表LPCC命令。
在我们采集LPCC参数以前,我们应该对语音信号进行预加重,帧处理,加工和终端窗口检测等,所以,中文命令字“前进”的端点检测如图2所示,接下来,断点检测后的中文命令字“前进”语音波形和LPCC的参数波形如图3所示。
图2 中文命令字“前进”的端点检测
图3 断点检测后的中文命令字“前进”语音波形和LPCC的参数波形
3.2 语音分形维数计算
分形维数是一个与分形的规模与数量相关的定值,也是对自我的结构相似性的测量。分形分维测量是[6-7]。从测量的角度来看,分形维数从整数扩展到了分数,打破了一般集拓扑学方面被整数分形维数的限制,分数大多是在欧几里得几何尺寸的延伸。
有许多关于分形维数的定义,例如相似维度,豪斯多夫维度,信息维度,相关维度,容积维度,计盒维度等等,其中,豪斯多夫维度是最古老同时也是最重要的,它的定义如【3】所示:
其中,表示需要多少个单位来覆盖子集F.
端点检测后,中文命令词“向前”的语音波形和分形维数波形如图4所示。
图4 端点检测后,中文命令词“向前”的语音波形和分形维数波形
3.3 改进的特征提取方法
考虑到LPCC语音信号和分形维数在表达上各自的优点,我们把它们二者混合到信号的特取中,即分形维数表表征语音时间波形图的自相似性,周期性,随机性,同时,LPCC特性在高语音质量和高识别速度上做得很好。
由于人工神经网络的非线性,自适应性,强大的自学能力这些明显的优点,它的优良分类和输入输出响应能力都使它非常适合解决语音识别问题。
由于人工神经网络的输入码的数量是固定的,因此,现在是进行正规化的特征参数输入到前神经网络[9],在我们的实验中,LPCC和每个样本的分形维数需要分别地通过时间规整化的网络,LPCC是一个4帧数据(LPCC1,LPCC2,LPCC3,LPCC4,每个参数都是14维的),分形维数被模范化为12维数据,(FD1,FD2,…FD12,每一个参数都是一维),以便于每个样本的特征向量有4*14+12*1=68-D维,该命令就是前56个维数是LPCC,剩下的12个维数是分形维数。因而,这样的一个特征向量可以表征语音信号的线形和非线性特征。
自动语音识别的结构和特征
自动语音识别是一项尖端技术,它允许一台计算机,甚至是一台手持掌上电脑(迈尔斯,2000)来识别那些需要朗读或者任何录音设备发音的词汇。自动语音识别技术的最终目的是让那些不论词汇量,背景噪音,说话者变音的人直白地说出的单词能够达到100%的准确率(CSLU,2002)。然而,大多数的自动语音识别工程师都承认这样一个现状,即对于一个大的语音词汇单位,当前的准确度水平仍然低于90%。举一个例子,Dragon's Naturally Speaking或者IBM公司,阐述了取决于口音,背景噪音,说话方式的基线识别的准确性仅仅为60%至80%(Ehsani & Knodt, 1998)。更多的能超越以上两个的昂贵的系统有Subarashii (Bernstein, et al., 1999), EduSpeak (Franco, etal., 2001), Phonepass (Hinks, 2001), ISLE Project (Menzel, et al., 2001) and RAD (CSLU, 2003)。语音识别的准确性将有望改善。
在自动语音识别产品中的几种语音识别方式中,隐马尔可夫模型(HMM)被认为是最主要的算法,并且被证明在处理大词汇语音时是最高效的(Ehsani & Knodt, 1998)。详细说明隐马尔可夫模型如何工作超出了本文的范围,但可以在任何关于语言处理的文章中找到。其中最好的是Jurafsky & Martin (2000) and Hosom, Cole, and Fanty (2003)。简而言之,隐马尔可夫模型计算输入接收信号和包含于一个拥有数以百计的本土音素录音的数据库的匹配可能性(Hinks, 2003, p. 5)。也就是说,一台基于隐马尔可夫模型的语音识别器可以计算输入一个发音的音素可以和一个基于概率论相应的模型达到的达到的接近度。高性能就意味着优良的发音,低性能就意味着劣质的发音(Larocca, et al., 1991)。
虽然语音识别已被普遍用于商业听写和获取特殊需要等目的,近年来,语言学习的市场占有率急剧增加(Aist, 1999; Eskenazi, 1999; Hinks, 2003)。早期的基于自动语音识别的软件程序采用基于模板的识别系统,其使用动态规划执行模式匹配或其他时间规范化技术(Dalby & Kewley-Port,1999). 这些程序包括Talk to Me (Auralog, 1995), the Tell Me More Series (Auralog, 2000), Triple-Play Plus (Mackey & Choi, 1998), New Dynamic English (DynEd, 1997), English Discoveries (Edusoft, 1998), and See it, Hear It, SAY IT! (CPI, 1997)。这些程序的大多数都不会提供任何反馈给超出简单说明的发音准确率,这个基于最接近模式匹配说明是由用户提出书面对话选择的。学习者不会被告之他们发音的准
确率。特别是内里,(2002年)评论例如Talk to Me和Tell Me More等作品中的波形图,因为他们期待浮华的买家,而不会提供有意义的反馈给用户。Talk to Me 2002年的版本已经包含了更多Hinks (2003)的特性,比如,信任对于学习者来说是非常有用的:
★一个视觉信号可以让学习者把他们的语调同模型扬声器发出的语调进行对比。★学习者发音的准确度通常以数字7来度量(越高越好)
★那些发音失真的词语会被识别出来并被明显地标注。
附件2:外文原文(复印件)
Improved speech recognition method
for intelligent robot
2、Overview of speech recognition
Speech recognition has received more and more attention recently due to the important theoretical meaning and practical value [5 ]. Up to now, most speech recognition is based on conventional linear system theory, such as Hidden Markov Model (HMM) and Dynamic Time Warping(DTW) . With the deep study of speech recognition, it is found that speech signal is a complex nonlinear process. If the study of speech recognition wants to break through, nonlinear
-system theory method must be introduced to it. Recently, with the developmentof nonlinea-system theories such as artificial neural networks(ANN) , chaos and fractal, it is possible to apply these theories to speech recognition. Therefore, the study of this paper is based on ANN and chaos and fractal theories are introduced to process speech recognition.
Speech recognition is divided into two ways that are speaker dependent and speaker independent. Speaker dependent refers to the pronunciation model trained by a single person, the identification rate of the training person?sorders is high, while others’orders is in low identification rate or can’t be recognized. Speaker independent refers to the pronunciation model
trained by persons of different age, sex and region, it can identify a group of persons’orders. Generally, speaker independent system ismorewidely used, since the user is not required to conduct the training. So extraction of speaker independent features from the speech signal is the fundamental problem of speaker recognition system.
Speech recognition can be viewed as a pattern recognition task, which includes training and recognition.Generally, speech signal can be viewed as a time sequence and characterized by the powerful hidden Markov model (HMM). Through the feature extraction, the speech signal is transferred into feature vectors and act asobservations. In the training procedure, these observationswill feed to estimate the model parameters of HMM. These parameters include probability density function for the observations and their corresponding states, transition probability between the states, etc. After the parameter estimation, the trained models can be used for recognition task. The input observations will be recognized as the resulted words and the accuracy can be evaluated. Thewhole process is illustrated in Fig. 1.
Fig. 1Block diagram of speech recognition system
3 Theory andmethod
Extraction of speaker independent features from the speech signal is the fundamental problem of speaker recognition system. The standard methodology for solving this problem uses Linear Predictive Cepstral Coefficients (LPCC) and Mel-Frequency Cepstral Co-efficient (MFCC). Both these methods are linear procedures based on the assumption that speaker features have properties caused by the vocal tract resonances. These features form the basic spectral structure of the speech signal. However, the non-linear information in speech signals is not easily extracted by the present feature extraction methodologies. So we use fractal dimension to measure non2linear speech turbulence.
This paper investigates and implements speaker identification system using both traditional LPCC and non-linear multiscaled fractal dimension feature extraction.
3. 1L inear Predictive Cepstral Coefficients
Linear prediction coefficient (LPC) is a parameter setwhich is obtained when we do linear prediction analysis of speech. It is about some correlation characteristics between adjacent speech samples. Linear prediction analysis is based on the following basic concepts. That is, a speech sample can be estimated approximately by the linear combination of some past speech samples. According to the minimal square sum principle of difference between real speech sample in certain analysis frame
short-time and predictive sample, the only group ofprediction coefficients can be determined.
LPC coefficient can be used to estimate speech signal cepstrum. This is a special processing method in analysis of speech signal short-time cepstrum. System function of channelmodel is obtained by linear prediction analysis as follow.
Where p represents linear prediction order, ak,(k=1,2,…,p) represent sprediction coefficient, Impulse response is represented by h(n). Suppose
cepstrum of h(n) is represented by ,then (1) can be expanded as (2).
The cepstrum coefficient calculated in the way of (5) is called LPCC, n represents LPCC order.
When we extract LPCC parameter before, we should carry on speech signal pre-emphasis, framing processing, windowingprocessing and endpoints detection etc. , so the endpoint detection of Chinese command word“Forward”is shown in Fig.2, next, the speech waveform ofChinese command word“Forward”and LPCC parameter waveform aft er Endpoint detection is shown in Fig. 3.
3. 2 Speech Fractal Dimension Computation
Fractal dimension is a quantitative value from the scale relation on the meaning of fractal, and also a measuring on self-similarity of its structure. The fractal measuring is fractal dimension[6-7]. From the viewpoint of measuring, fractal dimension is extended from integer to fraction, breaking the limitof the general to pology set dimension being integer Fractal dimension,fraction mostly, is dimension extension in Euclidean geometry.
There are many definitions on fractal dimension, eg.,similar dimension, Hausdoff dimension, inforation dimension, correlation dimension, capability imension, box-counting dimension etc. , where,Hausdoff dimension is oldest and also most important, for any sets, it is defined as[3].
Where, M£(F) denotes how many unit £needed to cover subset F.
In thispaper, the Box-Counting dimension (DB) of ,F, is obtained by partitioning the plane with squares grids of side £, and the numberof squares that intersect the plane (N(£)) and is defined as[8].
The speech waveform of Chinese command word“Forward”and fractal dimension waveform after Endpoint detection is shown in Fig. 4. 3. 3Improved feature extractions method
Considering the respective advantages on expressing speech signal of LPCC and fractal dimension,we mix both to be the feature signal, that is, fractal dimension denotes the self2similarity, periodicity and randomness of speech time wave shape, meanwhile LPCC feature is good for speech quality and high on identification rate.
Due to ANN′s nonlinearity, self-adaptability, robust and self-learning such obvious advantages, its good classification and input2output reflection ability are suitable to resolve speech recognition problem.
Due to the number of ANN input nodes being fixed, therefore time regularization is carried out to the feature parameter before inputted to the neural network[9]. In our experiments, LPCC and fractal dimension of each
sample are need to get through the network of time regularization separately, LPCC is 4-frame data(LPCC1,LPCC2,LPCC3,LPCC4, each frame parameter is 14-D), fractal dimension is regularized to be12-frame data(FD1,FD2,…,FD12, each frame parameter is 1-D), so that the feature vector of each sample has 4*14+1*12=68-D, the order is, the first 56 dimensions are LPCC, the rest 12 dimensions are fractal dimensions. Thus, such mixed feature parameter can show speech linear and nonlinear characteristics as well.
Architectures and Features of ASR ASR is a cutting edge technology that allows a computer or even a hand-held PDA (Myers, 2000) to identify words that are read aloud or spoken into any sound-recording device. The ultimate purpose of ASR technology is to allow 100% accuracy with all words that are intelligibly spoken by any person regardless of vocabulary size, background noise, or speaker variables (CSLU, 2002). However, most ASR engineers admit that the current accuracy level for a large vocabulary unit of speech (e.g., the sentence) remains less than 90%. Dragon's Naturally Speaking or IBM's ViaV oice, for example, show a baseline recognition accuracy of only 60% to 80%, depending upon accent, background noise, type of utterance, etc. (Ehsani & Knodt, 1998). More expensive systems that are reported to outperform these two are Subarashii (Bernstein, et al., 1999), EduSpeak (Franco, et al., 2001), Phonepass (Hinks, 2001), ISLE Project (Menzel, et al., 2001) and RAD (CSLU, 2003). ASR accuracy is expected to improve. Among several types of speech recognizers used in ASR products, both implemented and proposed, the Hidden Markov Model (HMM) is one of the most dominant algorithms and has proven to be an effective method of dealing with large units of speech (Ehsani & Knodt, 1998). Detailed descriptions of how the HHM model works go beyond the scope of this paper and can be found in any text concerned with language processing; among the best are Jurafsky & Martin (2000) and Hosom, Cole, and Fanty
(2003). Put simply, HMM computes the probable match between the input it receives and phonemes contained in a database of hundreds of native speaker recordings (Hinks, 2003, p. 5). That is, a speech recognizer based on HMM computes how close the phonemes of a spoken input are to a corresponding model, based on probability theory. High likelihood represents good pronunciation; low likelihood represents poor pronunciation (Larocca, et al., 1991).
While ASR has been commonly used for such purposes as business dictation and special needs accessibility, its market presence for language learning has increased dramatically in recent years (Aist, 1999; Eskenazi, 1999; Hinks, 2003). Early ASR-based software programs adopted template-based recognition systems which perform pattern matching using dynamic programming or other time normalization techniques (Dalby & Kewley-Port, 1999). These programs include Talk to Me (Auralog, 1995), the Tell Me More Series (Auralog, 2000), Triple-Play Plus (Mackey & Choi, 1998), New Dynamic English (DynEd, 1997), English Discoveries (Edusoft, 1998), and See it, Hear It, SA Y IT! (CPI, 1997). Most of these programs do not provide any feedback on pronunciation accuracy beyond simply indicating which written dialogue choice the user has made, based on the closest pattern match. Learners are not told the accuracy of their pronunciation. In particular, Neri, et al. (2002) criticizes the graphical wave forms presented in products such as Talk to Me and Tell Me More because
they look flashy to buyers, but do not give meaningful feedback to users. The 2000 version of Talk to Me has incorporated more of the features that Hinks (2003), for example, believes are useful to learners:
★A visual signal allows learners to compare their intonation to that of the model speaker.
★The learners' pronunciation accuracy is scored on a scale of seven (the higher the better).
Words whose pronunciation fails to be recognized are highlighted
人工智能与机器人
1 1.机器人定义的三个共有属性是:有类人的功能、根据人的编程能自动的工作、人造的机器或机械电子装置。 2.简述机器人的发展史? 1954年美国人(George C. Devol)乔治·德沃尔制造出世界上第一台可编程的机器人,并在1956年获得美国专利。 1959年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。 1960年,Conder公司购买专利并制造了样机。 1961年,Unimation公司(通用机械公司)成立,生产和销售了第一台工业机器“Unimate”,即万能自动之意。 1962年,美国万能自动化(Unimation)公司的第一台机器人Unimate在美国通用汽车公司(GM)投入使用标志着第一代机器人的诞生。 1963年麦卡锡则开始在机器人中加入视觉传感系统。 1965年 MIT推出了世界上第一个带有视觉传感器。 1967年, Unimation公司第一台喷涂用机器人出口到日本川崎重工业公司。 1968年,第一台智能机器人Shakey在斯坦福研究所诞生。 1972年,IBM公司开发出直角坐标机器人。 1973年,Cincinnati Milacron公司推出T3型机器人。 1978年,第一台PUMA机器人在Unimation公司诞生 1998年世界著名玩具厂商丹麦乐高(LEGO)公司推出机器人(Mind-storms)套件,让机器人制造变得跟搭积木一样, 1999年日本索尼公司推出犬型机器人爱宝(AIBO)。 2002年5月2日本田制造的名叫阿西(Asimo)四英尺高的白色机器人摇响开市铃声,摇响了机器智能时代的开始。 2006年6月,微软公司推出基于Windows的开发环境,用于构建面向各种硬件平台的软件---Microsoft Robotics Studio,试图实现机器人统一的标准或平台。
智能搬运机器人项目 可行性研究报告 xxx集团
第一章总论 一、项目概况 (一)项目名称 智能搬运机器人项目 (二)项目选址 xx经济开发区 对周围环境不应产生污染或对周围环境污染不超过国家有关法律和现 行标准的允许范围,不会引起当地居民的不满,不会造成不良的社会影响。 (三)项目用地规模 项目总用地面积53800.22平方米(折合约80.66亩)。 (四)项目用地控制指标 该工程规划建筑系数54.20%,建筑容积率1.07,建设区域绿化覆盖率7.95%,固定资产投资强度177.40万元/亩。 (五)土建工程指标 项目净用地面积53800.22平方米,建筑物基底占地面积29159.72平 方米,总建筑面积57566.24平方米,其中:规划建设主体工程42271.13 平方米,项目规划绿化面积4576.82平方米。 (六)设备选型方案 项目计划购置设备共计110台(套),设备购置费5114.16万元。
(七)节能分析 1、项目年用电量635631.19千瓦时,折合78.12吨标准煤。 2、项目年总用水量35246.18立方米,折合3.01吨标准煤。 3、“智能搬运机器人项目投资建设项目”,年用电量635631.19千瓦时,年总用水量35246.18立方米,项目年综合总耗能量(当量值)81.13 吨标准煤/年。达产年综合节能量22.88吨标准煤/年,项目总节能率 28.66%,能源利用效果良好。 (八)环境保护 项目符合xx经济开发区发展规划,符合xx经济开发区产业结构调整 规划和国家的产业发展政策;对产生的各类污染物都采取了切实可行的治 理措施,严格控制在国家规定的排放标准内,项目建设不会对区域生态环 境产生明显的影响。 (九)项目总投资及资金构成 项目预计总投资18832.94万元,其中:固定资产投资14309.08万元,占项目总投资的75.98%;流动资金4523.86万元,占项目总投资的24.02%。 (十)资金筹措 该项目现阶段投资均由企业自筹。 (十一)项目预期经济效益规划目标 预期达产年营业收入38760.00万元,总成本费用29806.75万元,税 金及附加363.39万元,利润总额8953.25万元,利税总额10551.57万元,
智能移动机器人的现状和发展 姓名 学号 班级:
智能移动机器人的现状及其发展 摘要:本文扼要地介绍了智能移动机器人技术的发展现状,以及世界各国智能移动机器人的发展水平,然后介绍了智能移动机器人的分类,从几个典型的方面介绍了智能移动机器人在各行各业的广泛应用,讨论了智能移动机器人的发展趋势以及对未来技术的展望,最后提出了自己的建议和设想,分析我国在智能移动机器人方面发展并提出期望。 关键词:智能移动机器人;发展现状;应用;趋势 1引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能移动机器人则是一个在感知 - 思维 - 效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能移动机器人应该具备三方面的能力:感知环境的能力、执行某种任务而对环境施加影响的能力和把感知与行动联系起来的能 力。智能移动机器人与工业机器人的根本区别在于,智能移动机器人具有感知功 能与识别、判断及规划功能[1] 。 随着智能移动机器人的应用领域的扩大,人们期望智能移动机器人在更多领 域为人类服务,代替人类完成更复杂的工作。然而,智能移动机器人所处的环境 往往是未知的、很难预测。智能移动机器人所要完成的工作任务也越来越复杂; 对智能移动机器人行为进行人工分析、设计也变得越来越困难。目前,国内外对 智能移动机器人的研究不断深入。 本文对智能移动机器人的现状和发展趋势进行了综述,分析了国内外的智能 移动机器人的发展,讨论了智能移动机器人在发展中存在的问题,最后提出了对 智能移动机器人发展的一些设想。 1
一种智能机器人系统设计和实现 我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的"活物".其实,这个自控"活物"的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只能从生命细胞生长的结果中得到,现在它们已经成了我们自己能够制造的东西了 嵌入式是一种专用的计算机系统,作为装置或设备的一部分。通常,嵌入式系统是一个控制程序存储在ROM中的嵌入式处理器控制板。事实上,所有带有数字接口的设备,如手表、微波炉、录像机、汽车等,都使用嵌入式系统,有些嵌入式系统还包含操作系统,但大多数嵌入式系统都是是由单个程序实现整个控制逻辑。嵌入式技术近年来得到了飞速的发展,但是嵌入式产业涉及的领域非常广泛,彼此之间的特点也相当明显。例如很多行业:手机、PDA、车载导航、工控、军工、多媒体终端、网关、数字电视…… 1 智能机器人系统机械平台的搭建 智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构进行实时控制,这种控制不仅要包括有位置控制,而且还要有力度控制、位置与力度混合控制、伸缩率控制等。智能机器人的思考要素是三个要素中的关键,也是人们要赋予机器人必备的要素。思考要素包括有判断、逻辑分析、理解等方面的智力活动。这些智力活动实质上是一个信息处理过程,而计算机则是完成这个处理过程的主要手段。 机器人前部为一四杆机构,使前轮能够在一定范围内调节其高度,主要功能是在机器人前部遇障碍时,前向连杆机构随车轮上抬,而遇到下凹障碍时前车轮先下降着地,以减小震动,提高整机平稳性。在主体的左右两侧,分别配置了平行四边形侧向被动适应机构,该平行四边形机构与主体之间通过铰链与其相连接,是小车行进的主要动力来源。利用两侧平行四边形可任意角度变形的特点,实现自适应各种障碍路面的效果。改变平行四边形机构的角度,可使左右两侧车轮充分与地面接触,使机器人的6个轮子受力尽量均匀,加强机器人对不同路面的适应能力,更加平稳地越过障碍,并且更好地保证整车的平衡性。主体机构主要起到支撑与连接机器人各个部分的作用,同时,整个机器人
智能机器人的现状及其发展趋势 摘要:本文扼要地介绍了智能机器人技术的发展现状,以及世界各国智能机器人的发展水平,然后介绍了智能机器人的分类,从几个典型的方面介绍了智能机器人在各行各业的广泛应用,讨论了智能机器人的发展趋势以及对未来技术的展望,最后提出了自己的建议和设想,分析我国在智能机器人方面发展并提出期望。 关键词:智能机器人;发展现状;应用;趋势 The status and trends of intellectual robot Abstract: This paper briefly discusses the development, status of intellectual robot, development of intellectual robot in many countries. And then it presents the categories of intellectual robot, talks about the extensive applications in all works of life from several typical aspects and trends of intellectual robot. After that, it puts forward prospects for future technology, suggestion and a tentative idea of myself, and analyses the development of intellectual robot in China. Finally, it raises expectations of intellectual robot in China. Key words: intellectual robot; development status; application; trend 1 引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能机器人则是一个在感知- 思维- 效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能机器人应该具备三方面的能力:感知环境的能力、执行某种任务而对环境施加影响的能力和把感知与行动联系起来的能力。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能[1]。 随着智能机器人的应用领域的扩大,人们期望智能机器人在更多领域为人类服务,代替
智能机器人设计报告 参赛者:庆东肖荣于腾飞 班级:级应用电子技术 指导老师:远明 日期:年月日 一、元器件清单: ,,,,,,,蜂鸣器,光敏电阻,光敏三极管,电阻、电容若干,超亮及普通发光管。二、主要功能: 本设计按要求制作了一个简易智能电动车,它能实现的功能是:从起跑线出发,沿引导线到达点。在此期间检测到铺设在白纸下的薄铁片,并实时存储、显示在“直道区”检测到的薄铁片数目。电动车到达点以后进入“弯道区”,沿圆弧引导线到达点继续行驶,在光源的引导下,利用轻触开关传来的电信号通过障碍区进入停车区并到达车库,完成上述任务后能够立即停车,全程行驶时间越少越好。 本寻迹小车是以有机玻璃为车架,单片机为控制核心,加以减速电机、光电传感器、光敏三极管、轻触开关和电源电路以及其他电路构成。系统由通过口控制小车的前进后退以及转向。寻迹由超亮发光二极管及光敏电阻完成,避障由轻触开关完成,寻光由光敏三极管完成。 并附加其他功能: .声控启动 .数码显示 .声光报警 三、主体设计 车体设计 左右两轮分别驱动,后万向轮转向的方案。为了防止小车重心的偏移,后万向轮起支撑作用。对于车架材料的选择,我们经过比较选择了有机玻璃。用有机玻璃做的车架比塑料车架更加牢固,比铁制小车更轻便,美观。而且裁减比较方便! 电机的固定采用的是铝薄片加螺丝固定,非常牢固,且比较美观。 轮子方案 在选定电机后,我们做了一个万向轮,万向轮的高度减去电机的半径就是驱动轮的半径。轮子用有机玻璃裁出来打磨光华的,上面在套上自行车里胎,以防止打滑。 万向轮 当小车前进时,左右两驱动轮与后万向轮形成了三点结构,这种结构使得小车在前进时比较平稳。
智能机器人项目 可行性研究报告 规划设计 / 投资分析
智能机器人项目可行性研究报告说明 该智能机器人项目计划总投资16599.99万元,其中:固定资产投资12680.16万元,占项目总投资的76.39%;流动资金3919.83万元,占项目 总投资的23.61%。 达产年营业收入35181.00万元,总成本费用27779.13万元,税金及 附加326.06万元,利润总额7401.87万元,利税总额8748.88万元,税后 净利润5551.40万元,达产年纳税总额3197.48万元;达产年投资利润率44.59%,投资利税率52.70%,投资回报率33.44%,全部投资回收期4.49年,提供就业职位576个。 报告根据我国相关行业市场需求的变化趋势,分析投资项目项目产品 的发展前景,论证项目产品的国内外市场需求并确定项目的目标市场、价 格定位,以此分析市场风险,确定风险防范措施等。 ...... 主要内容:基本情况、项目建设必要性分析、产业分析预测、产品规 划及建设规模、项目选址方案、土建工程说明、工艺概述、环境保护概况、项目职业安全管理规划、建设及运营风险分析、节能情况分析、进度计划、投资分析、经济收益分析、项目评价等。
第一章基本情况 一、项目概况 (一)项目名称 智能机器人项目 (二)项目选址 xx经济新区 (三)项目用地规模 项目总用地面积50885.43平方米(折合约76.29亩)。 (四)项目用地控制指标 该工程规划建筑系数57.44%,建筑容积率1.54,建设区域绿化覆盖率6.93%,固定资产投资强度166.21万元/亩。 (五)土建工程指标 项目净用地面积50885.43平方米,建筑物基底占地面积29228.59平方米,总建筑面积78363.56平方米,其中:规划建设主体工程62365.61平方米,项目规划绿化面积5430.89平方米。 (六)设备选型方案 项目计划购置设备共计155台(套),设备购置费5415.20万元。 (七)节能分析 1、项目年用电量965570.32千瓦时,折合118.67吨标准煤。
思考题 ?红外测距卡的测量范围及原理。 答:红外测距卡可以精确地测量10cm~80cm范围内障碍物的距离。 红外测距卡,顾名思义就是用红外光进行物体距离的检测。它分为一个模拟口的转接卡和红外测距传感器两部分。通过测量发射和反射红外光之间的相位差来测量物体的距离。红外测距卡能够把相位差的变化转化为输出电压的变化,输出电压可以通过红外测距的信号线接到微控制器的A/D转换口上。 ?多智能体通信的方式是什么? 答:多智能体通信主要有三种通信方式:直接通信,强信号通信,黑板通信。 (1)直接通信:是指信息发送方智能体直接将信息传送给接受方智能体,执行过程中没有缓冲。 (2)强信号通信:是指当一个智能体发送消息时,实际上是将信息向整个系统或环境发送,并且信息的强度随距离的增加而减少,这样靠近信号源的智能体对信息的反应最强。 (3)黑板通信:是通过存取一个公用数据区以达到交换信息的目的。 ?简述机器人无线控制的实现过程。 答:计算机通过电平转换装置与一个无线收发模块相连,而机器人本身带有无线收发模块,机器人的无线收发模块与它自己的微处理器有信号线相连。这样计算机处理器和机器人微处理器之间就可以通过这两个无线收发模块实现通信,这种通信方式是双向的,计算机可通过程序指令控制机器人的行为,机器人也可以借助计算机处理复杂的信息。 ?简述基于视频技术的野外探险机器人系统的硬件结构及实现过程 答:系统硬件结构:从总体上分为机器人和上位机(计算机)。其中机器人部分包括AS无线摄像机和微功率无线通讯模块,上位机部分包括视频采集卡和微功率无线通讯模块。 实现过程:机器人上的无线摄像机通过摄像获取各种现场环境参数,通过机器人和上位机上的两个微功率无线通讯模块实现数据和控制信号的传输,从而AS无线摄像机的接收模块的视频输出接到了视频采集卡的视频输入端,因而机器人能自主运动,也能通过上位机的人机交互式进行控制。 ?机器人上程序不能正确下载的原因有哪些? 答:主要有以下原因:操作系统崩溃、机器人死机、操作系统不正常、下载过程中按下复位键、型号不匹配、下载端口接触不良、下载线或端口已坏。 ?同步进程的处理原则是什么?如何利用同步进程的处理原则编写机器飞蛾程序?答:所有同步进程应该遵循以下四条原则: (1)空闲让进:当一个临界资源处于空闲状态时,允许一个请求进入临界区的进程立即进入自己的临界区。 (2)忙则等待:当已有进程进入自己的临界区时,其它试图进入临界区的进程必须等待,以保证进程互斥地访问临界资源。 (3)有限等待:对要求访问临界资源的进程,应保证进程能在有限时间进入临界区,
智能机器人的设计与制作WORD版本可编辑
智能机器人的设计与制作 引言 近几年机器人已成为高技术领域内具有代表性的战略目标。机器人技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。目前机器已经走进人们的生活与工作,机器人已经在很多的领域代替着人类的劳动,发挥着越来越重要的作用,人们已经越来越离不开机器人帮助。机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动控制等为一体。目前对机器人的研究已经呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。目前机器人行业的发展与30 年前的电脑行业极为相似。今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦察机器人、以及负责清扫地板的家用机器人,还有不少参照人、狗、恐龙的样子制造机器人玩具。舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。我从前年开始机器人方面的研究,在这过程中尝试过很多次的失败,也感受到了无比的乐趣。 图1.1、机器人 1 绪论
机器人技术作为20 世纪人类最伟大的发明之一,自20 世纪60 年代初问世以来,经历40 余年的发展已取得长足的进步。未来的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机器,是集机械学、力学、电子学、生物学、控制论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。走向成熟的工业机器人,各种用途的特种机器人的多用化,昭示着机器人技术灿烂的明天。 1.1 国内外机器人技术发展的现状 为了使机器人能更好的应用于工业,各工业发达国家的大学、研究机构和大工业企业对机器人系统开发投入了大量的人力财力。在美国和加拿大,各主要大学都设有机器人研究室,麻省理工学院侧重于制造过程机器人系统的研究,卡耐基—梅隆机器人研究所侧重于挖掘机器人系统的研究,而斯坦福大学则着重于系统应用软件的开发。德国正研究开发“MOVE AND PLAY”机器人系统,使机器人操作就像人们操作录像机、开汽车一样。从六十年代开始日本政府实施一系列扶植政策,使日本机器人产业迅速发展起来,经过短短的十几年。到80 年代中期,已一跃而为“机器人王国”。其机器人的产量和安装的台数在国际上跃居首位。按照日本产业机器人工业会常务理事米本完二的说法:“日本机器人的发展经过了60 年代的摇篮期。70 年代的实用期。到80 年代进人普及提高期。” 并正式把1980 年定为产业机器人的普及元年”。开始在各个领域内广泛推广使用机器人。中国机器人的发展起步较晚,1972 年我国开始研制自己的工业机器人。"七五"期间,国家投入资金,对工业机器人及其零部件进行攻关,完成了示教再现式工业机器人成套技术的开发,研制出了喷涂、点焊、弧焊和搬运机器人。1986 年国家高技术研究发展计划(863 计划)开始实施,智能机器人主题跟踪世界机器人技术的前沿,经过几年的研究,取得了一大批科研成果,成功地研制出了一批特种机器人。20 世纪90 年代,我国的工业机器人又在实践中迈进一大步,先后研制出了点焊、装配、喷漆、切割、搬运等各种用途的工业机器人,并实施了一批机器人应用工程,形成了一批机器人产业化基地,为我国机器人产业的腾飞奠定了基础。 1.2 机器人技术的市场应用 机器人融入我们日常生活的步伐有多快?据国际机器人联盟调查,2004 年,全球个人机器人约有200 万台,到2008 年,还将有700 万台机器人投入运行。按照韩国信息通信部的计划,到2013 年,韩国每个家庭都能拥有一台机器人;而日本机器人协会预测,到2025 年,全球机器人产业的“蛋糕”将达到每年500 亿美元的规模(现在仅有50亿美元)。与20 世纪70 年代PC 行业的情况相仿,我们不可能准确预测出究竟哪些用途将推动这个新兴行业进入临界状态。不过看起来,机器人很可能在护理和陪伴老年人的工作上大展宏图,或许还可以帮助残疾人四处走走,并增强士兵、建筑工人和医护人员的体力与耐力。目前,我国从事机器人研发和应用工程的单位200 多家,拥有量为3500 台左右,其中国产占20%,其余都是从日本、美国、瑞典等40 多个国家引进的。2000 年已生产 各种类型工业机器人和系统300 台套,机器人销售额6.74 亿元,机器人产业对国民经济的年收益额为47 亿元,我国对工业机器人的需求量和品种将逐年大幅度增加。1.3 机器人技术的前景展望机器人是人类的得力助手,能友好相处的可靠朋友,将来我们会看到人和机器人会存在一个空间里边,成为一个互相的助手
:人类智能的特性表现在 4 个方面 。 A:聪明、灵活、学习、运用。 B:能感知客观世界的信息、能对通过思维对获得的知识进行加工处理、能通过学习积累知识 增长才干和适应环境变化、能对外界的刺激作出反应传递信息。 C:感觉、适应、学习、创新。 D:能捕捉外界环境信息、能够利用利用外界的有利因素、能够传递外界信息、能够综合外界 信息进行创新思维。 2:人工智能的目的是让机器能够 ,以实现某些脑力劳动的机械化。 A:具有智能 B:和人一样工作 C:完全代替人的大脑 D:模拟、延伸和扩展人的智能 3:下列关于人工智能的叙述不正确的有: 。 A:人工智能技术它与其他科学技术相结合极大地提高了应用技术的智能化水平。 B:人工智能是科学技术发展的趋势。 C:因为人工智能的系统研究是从上世纪五十年代才开始的,非常新,所以十分重要。 D:人工智能有力地促进了社会的发展。 4:人工智能研究的一项基本内容是机器感知。以下列举中的 不属于机器感知 的领域。 A:使机器具有视觉、听觉、触觉、味觉、嗅觉等感知能力。 B:让机器具有理解文字的能力。 C:使机器具有能够获取新知识、学习新技巧的能力。 D:使机器具有听懂人类语言的能力 5:自然语言理解是人工智能的重要应用领域,下面列举中的 不是它要实现的 目标。 A:理解别人讲的话。 B:对自然语言表示的信息进行分析概括或编辑。 C:欣赏音乐。 D:机器翻译。 6:为了解决如何模拟人类的感性思维,例如视觉理解、直觉思维、悟性等,研究者找到一个 重要的信息处理的机制是: 。 A:专家系统 B:人工神经网络 C:模式识别 D:智能代理 7: 根据下列选项来判断可以用指纹来鉴定的是: ①证件 ②签字 ③照片 ④ 密码 ⑤钥 匙 ⑥印签( ) A : ① ② B : ① ② ③ C:①②③④ D:①②③④⑤⑥ 8:下列选项错误的是( ) A:研究人工智能成为当前信息化社会的迫切需求 B:智能化是自动化发展的必要趋势 C:人工智能的研究方法:结构模拟、功能模拟和行为模拟 D:人工智能的实质是人造的智能 9:机器人之父是指: ( ) A:阿兰.图灵 B:伯纳斯.李 C:莎佩克 D:英格伯格和德沃尔 10:下列哪个应用领域不属于人工智能应用?( )
1/5
人工智能机器人项目 可行性研究报告 xxx投资公司
第一章概论 一、项目概况 (一)项目名称 人工智能机器人项目 (二)项目选址 xxx经济示范区 对周围环境不应产生污染或对周围环境污染不超过国家有关法律和现 行标准的允许范围,不会引起当地居民的不满,不会造成不良的社会影响。 (三)项目用地规模 项目总用地面积17795.56平方米(折合约26.68亩)。 (四)项目用地控制指标 该工程规划建筑系数66.82%,建筑容积率1.11,建设区域绿化覆盖率6.59%,固定资产投资强度184.09万元/亩。 (五)土建工程指标 项目净用地面积17795.56平方米,建筑物基底占地面积11890.99平 方米,总建筑面积19753.07平方米,其中:规划建设主体工程13011.47 平方米,项目规划绿化面积1302.13平方米。 (六)设备选型方案 项目计划购置设备共计63台(套),设备购置费2346.84万元。
(七)节能分析 1、项目年用电量1277446.20千瓦时,折合157.00吨标准煤。 2、项目年总用水量4025.69立方米,折合0.34吨标准煤。 3、“人工智能机器人项目投资建设项目”,年用电量1277446.20千 瓦时,年总用水量4025.69立方米,项目年综合总耗能量(当量值) 157.34吨标准煤/年。达产年综合节能量52.45吨标准煤/年,项目总节能 率27.63%,能源利用效果良好。 (八)环境保护 项目符合xxx经济示范区发展规划,符合xxx经济示范区产业结构调 整规划和国家的产业发展政策;对产生的各类污染物都采取了切实可行的 治理措施,严格控制在国家规定的排放标准内,项目建设不会对区域生态 环境产生明显的影响。 (九)项目总投资及资金构成 项目预计总投资5807.83万元,其中:固定资产投资4911.52万元, 占项目总投资的84.57%;流动资金896.31万元,占项目总投资的15.43%。 (十)资金筹措 该项目现阶段投资均由企业自筹。 (十一)项目预期经济效益规划目标 预期达产年营业收入6458.00万元,总成本费用5158.57万元,税金 及附加92.69万元,利润总额1299.43万元,利税总额1571.35万元,税
智能机器人的现状及其发展 学院:电气信息学院姓名:张琪学号:1143031172 摘要:本文主要介绍了智能机器人的发展现状、关键技术及其在各个领域的应用。然后总结了智能机器人在发展中存在的一些问题。最后提出了自己的建议和设想。 关键词:智能机器人;发展现状;传感器技术;智能控制;人机接口;应用 1.引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能机器人则是一个在感知- 思维- 效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能机器人应该具备三方面的能力:感知环境的能力、执行某种任务而对环境施加影响的能力和把感知与行动联系起来的能力。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能。 随着智能机器人的应用领域的扩大,人们期望智能机器人在更多领域为人类服务,代替人类完成更复杂的工作。然而,智能机器人所处的环境往往是未知的、很难预测。智能机器人所要完成的工作任务也越来越复杂;对智能机器人行为进行人工分析、设计也变得越来越困难。目前,国内外对智能机器人的研究不断深入。 本文对智能机器人的现状和发展趋势进行了综述,分析了国内外的智能机器人的发展,讨论了智能机器人在发展中存在的问题,最后提出了对智能机器人发展的一些设想。 2.国内外在该领域的发展现状综述 智能机器人是第三代机器人,这种机器人带有多种传感器,能够将多种传感器得到的信息进行融合,能够有效的适应变化的环境,具有很强的自适应能力、学习能力和自治功能。 目前研制中的智能机器人智能水平并不高,只能说是智能机器人的初级阶段。智能机器人研究中当前的核心问题有两方面:一方面是,提高智能机器人的自主性,这是就智能机器人与人的关系而言,即希望智能机器人进一步独立于人,具有更为友善的人机界面。从
工业机器人项目可行性报告 xxx有限责任公司
摘要说明— 工业机器人是工业互联网在硬件环节的核心支撑,“新基建”投资有 望进一步激活中国制造业对机器人及智能制造装备的需求。机器人作为工 业互联网体系的重要组成部分,承载着大量相关系统、工艺参数、软件工具、企业业务需求和制造能力,引导汇聚和链接着大量工业资源,通过交 互协同和迭代优化,为智能的产生提供必要基础,为制造业智能化的发展 创造前提条件。同时,工业机器人能够充分发挥工业互联网平台的重要作用,成为工业全要素链接的枢纽,向上对接工业应用,向下连接海量设备,持续沉淀和积累海量具备应用推广价值的工业经验与知识模型,通过更为 科学、高效的工业资源配置方式及路径,驱动制造业体系和生态的智能化 升级与运转。 二是新型基础设施建设更加侧重于突出产业转型升级的新方向,无论 是人工智能还是物联网,都体现出加快推进产业高端化发展的大趋势。 与传统基础设施建设相比,一是新型基础设施建设内涵更加丰富,涵 盖范围更广,如区块链、云计算等,更能凸显数字经济特征,能够更好推 动中国经济转型升级。 新型基础设施是以新发展理念为引领,以技术创新为驱动,以信息网 络为基础,面向高质量发展需要,提供数字转型、智能升级、融合创新等 服务的基础设施体系。“新基建”具有新时代的丰富内涵,既符合未来经
济社会发展趋势,又适应中国当前社会经济发展阶段和转型需求,在补短板的同时将成为社会经济发展的新引擎。良好的政策环境有助于提高新型基础设施的长期供给质量和效率,促进新兴行业持续健康发展,因此,开展“新基建”政策研究意义重大。 该工业机器人项目计划总投资6993.79万元,其中:固定资产投资6098.14万元,占项目总投资的87.19%;流动资金895.65万元,占项目总投资的12.81%。 达产年营业收入6851.00万元,总成本费用5432.97万元,税金及附加118.64万元,利润总额1418.03万元,利税总额1732.26万元,税后净利润1063.52万元,达产年纳税总额668.74万元;达产年投资利润率20.28%,投资利税率24.77%,投资回报率15.21%,全部投资回收期8.08年,提供就业职位115个。 报告内容:概述、项目建设背景、市场研究、项目投资建设方案、项目建设地研究、建设方案设计、工艺可行性、项目环境影响分析、企业安全保护、风险性分析、节能说明、项目计划安排、投资估算、项目经营效益分析、项目综合结论等。 泓域咨询规划设计/投资分析/产业运营
第一课 教学机器人 一、教学目标 帮助学生了解机器人的由来 二、重点难点 使学生理解机器人是靠什么来思考,机器人的部分。 三、教学过程: 第一课时 机器人的故事 新课导入 “robot”一词源出自捷克语“robota”,意为“强迫劳动”。1920年捷克斯洛伐克作家萨佩克写了一个名为《洛桑万能机器人公司》的剧本,他把在洛桑万能机器人公司生产劳动的那些家伙取名“Robot”,汉语音译为“罗伯特”,捷克语意为“奴隶”——萨佩克把机器人的地位确定为只管埋头干活、任由人类压榨的奴隶,它们存在的价值只是服务于人类。它们沒有思维能力,不能思考,只是类似人的机器,很能干, 以便使人摆脱劳作。它们能生存20年,刚生产出来时由人教它们知识。它们不能思考,也有感情,一个人能干三个人的活,公司为此生意兴隆。后来一个极其偶然的原因,机器人开始有了知觉,它们不堪忍受人类的统治,做人类的奴隶,于是,机器人向人类发动攻击,最后彻底毁灭了人类。“机器人”的名字也正式由此而生。 新课讲授 第一代机器人只能用手抓取东西,用脚行走,听“懂”主人的语言,做一些重复性的机械动作。人们把它称为工业机器人。现在,机器人经过好几代的更新改造,已经能和人们自由交谈,沟通语言,并灵活地走动。也就是说,它不仅有了听觉、视觉、触觉,而且还具有记忆、学习、思维和判断能力。人们把新一代的机器人称为智能机器 人。 明天的高级智能机器人将比今天的智能机器人具有更丰富的感觉功能和更熟练的活动能力。到那时,家庭里将有服务周到、态度和蔼可亲的家庭机器人。早晨,主人吃过早点上班以后,它立即用吸尘器清的房间,用洗衣机洗涤(dí)主人换下的衣服。电话铃响了,它马上拿起耳机,在一张便条上记下对话内容。“哇——”摇篮里的婴儿醒了,它又像慈祥的母亲一样抱起婴儿,喂水、喂奶,轻声哼(hēng)起一支 优美动听的催眠曲,把婴儿再一次送入梦乡。门铃响了,它并不急于开门,而首先问来访者是谁,然后根据来访者的声音仔细辨别他是不是主人的客人,以此决定是否开门。即使是盗贼的恐吓,它也不会害怕,而是声色俱厉地高喊:“快走,你这个无赖(lài)!再不走,我要报警了!”盗贼听到这喊声,只好胆战心惊地走开。做午餐的铃声响了,
浅谈人工智能学习研究的现状 及其发展趋势 摘要:自上世纪五十年代以来,经过了几个阶段的不断探索和发展,人工智能在模式识别、知识工程、机器人等领域已经取得重大成就,但是离真正意义上的的人类智能还相差甚远。但是进入新世纪以来,随着信息技术的快速进步,与人工智能相关的技术水平也得到了相应的提高。尤其是随着因特网的普及和应用,对人工智能的需求,变得越来越迫切,也给人工智能的研究提供了新的更加广泛的舞台。本文强调在当今的网络时代,作为信息技术的先导,人工智能学习在人工智能科学领域中是一个着非常值得关注的研究方向,要在学科交叉研究中实现人工智能学习的发展与创新,就要关注认知科学、脑科学、生物智能、物理学、复杂网络、计算机科学与人工智能之间的交叉渗透点,尤其是重视认知物理学的研究。自然语言是人类思维活动的载体,是人工智能学习研究知识表示无法回避的直接对象,要对语言中的概念建立起能够定量表示的不确定性转换模型,发展不确定性人工智能;要利用现实生活中复杂网络的小世界模型和无尺度特性,把网络拓扑作为知识表示的一种新方法,研究网络拓扑的演化与网络动力学行为,研究网络化了的智能,从而适应信息时代数据挖掘的普遍要求,迎接人工智能
学习与应用领域新的辉煌。 1.前言 自20世纪90年代以来,随着全球化的形式与国际竞争的日益激烈,对人工智能技术的研究与应用变的越来越被人们关注,且人工智能在制造中的运用以成为实现制造的知识化、自动化、柔性化以实现对市场的快速响应的关键。 人工智能已对现实社会做出了非常重大的贡献,而且其作用已在各领域发挥得淋漓尽致,特别是在计算机领域,人工智能的应用更加突出,可以说,哪里有计算机应用,哪里就在应用人工智能;哪里需要自动化或半自动化,哪里就在应用人工智能的理论、方法和技术。目前,人工智能应用的主要领域,也就是计算机应用的主要领域。 人工智能是一门研究人类智能的机理以及如何用机器模拟人的智能的学科。从后一种意义上讲,人工智能又被称为“机器智能”或“智能模拟”。人工智能是在现代电子计算机出现之后才发展起来的,它一方面成为人类智能的延长,另一方面又为探讨人类智能机理提供了新的理论和研究方法。 学习机制的研究是人工智能研究的一项核心课题。它是智能系统具有适应性与性能自完善功能的基础。学习过程具有以下特点:学习行为一般具有明显的目的性,其结果是获
智能机器人的设计与制作 引言 近几年机器人已成为高技术领域内具有代表性的战略目标。机器人技术的出现和 进展,不但使传统的工业生产面貌发生全然性变化,而且将对人类社会产生深远的阻碍。随着社会生产技术的飞速进展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探究,乃至太空作业等领域,机器人可谓是无处不在。目前机器差不多走进人们的生活与工作,机器人差不多在专门多的领域代替着人类的劳动,发挥着越来越重要的作用,人们差不多越来越离不开机器人关心。机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动操纵等为一体。目前对机器人的研究差不多呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。目前机器人行业的进展与30 年前的电脑行业极为相似。今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也同样种类繁多,比如协助大夫进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦察机器人、以及负责清扫地板的家用机器人,还有许多参照人、狗、恐龙的模样制
造机器人玩具。舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青青年的喜爱。我从前年开始机器人方面的研究,在这过程中尝试过专门多次的失败,也感受到了无比的乐趣。 图1.1、机器人 1 绪论 机器人技术作为20 世纪人类最伟大的发明之一,自20 世纪60 年代初问世以来, 经历40 余年的进展已取得长足的进步。以后的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机
器,是集机械学、力学、电子学、生物学、操纵论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。走向成熟的工业机器人,各种用途的特种机器人的多用化,昭示着机器人技术灿烂的改日。 1.1 国内外机器人技术进展的现状 为了使机器人能更好的应用于工业,各工业发达国家的大学、研究机构和大工业企业对机器人系统开发投入了大量的人力财力。在美国和加拿大,各要紧大学都设有机器人研究室,麻省理工学院侧重于制造过程机器人系统的研究,卡耐基—梅隆机器人研究所侧重于挖掘机器人系统的研究,而斯坦福大学则着重于系统应用软件的开发。德国正研究开发“MOVE AND PLAY”机器人系统,使机器人操作就像人们操作录像机、开汽车一样。从六十年代开始日本政府实施一系列扶植政策,使日本机器人产业迅速进展起来,通过短短的十几年。到80 年代中期,已一跃而为“机器人王国”。其机器人的产量和安装的台数在国际上跃居首位。按照日本产业机器人工业会常务理事米本完二的讲法:“日本机器人的进展通过了60 年代的摇篮期。70 年代的有用期。到80 年代进人普及提高期。” 并正式把1980 年定为产业机器人的普及元年”。开始在各个领
智能工业机器人项目 可行性研究报告 编制单位:北京中投信德国际信息咨询有限公司编制时间:https://www.doczj.com/doc/091790747.html, 高级工程师:高建
关于编制智能工业机器人项目可行性研究 报告编制说明 (模版型) 【立项 批地 融资 招商】 核心提示: 1、本报告为模板形式,客户下载后,可根据报告内容说明,自行修改,补充上自己项目的数据内容,即可完成属于自己,高水准的一份可研报告,从此写报告不在求人。 2、客户可联系我公司,协助编写完成可研报告,可行性研究报告大纲(具体可跟据客户要求进行调整) 编制单位:北京中投信德国际信息咨询有限公司 专 业 撰写节能评估报告资金申请报告项目建议书 商业计划书可行性研究报告
目录 第一章总论 (1) 1.1项目概要 (1) 1.1.1项目名称 (1) 1.1.2项目建设单位 (1) 1.1.3项目建设性质 (1) 1.1.4项目建设地点 (1) 1.1.5项目主管部门 (1) 1.1.6项目投资规模 (2) 1.1.7项目建设规模 (2) 1.1.8项目资金来源 (3) 1.1.9项目建设期限 (3) 1.2项目建设单位介绍 (3) 1.3编制依据 (3) 1.4编制原则 (4) 1.5研究范围 (5) 1.6主要经济技术指标 (5) 1.7综合评价 (6) 第二章项目背景及必要性可行性分析 (7) 2.1项目提出背景 (7) 2.2本次建设项目发起缘由 (7) 2.3项目建设必要性分析 (7) 2.3.1促进我国智能工业机器人产业快速发展的需要 (8) 2.3.2加快当地高新技术产业发展的重要举措 (8) 2.3.3满足我国的工业发展需求的需要 (8) 2.3.4符合现行产业政策及清洁生产要求 (8) 2.3.5提升企业竞争力水平,有助于企业长远战略发展的需要 (9) 2.3.6增加就业带动相关产业链发展的需要 (9) 2.3.7促进项目建设地经济发展进程的的需要 (10) 2.4项目可行性分析 (10) 2.4.1政策可行性 (10) 2.4.2市场可行性 (10) 2.4.3技术可行性 (11) 2.4.4管理可行性 (11) 2.4.5财务可行性 (11) 2.5智能工业机器人项目发展概况 (12)
编号:201301143 哈尔滨工业大学 大一年度项目结题报告 越野避障机器人的研究项目名称: 项目负责人:学号: 联系电话:电子邮箱: 院系及专业: 指导教师:职称:
联系电话:电子邮箱: 院系及专业: 哈尔滨工业大学基础学部制表 填表日期:2014年7 月9日1 一、项目团队成员(包括项目负责人、按顺序) 二、指导教师意见
三、项目专家组意见 四、项目成果 1
摘要 自从我们小组确定了《越野避障机器人的研究》这一科创项目后,以小组合作的形式进行了为期一学期的学习,主要针对其中的控制系统进行测试与运行。我们学习了传感器的使用以及相关运动指令的编程,并达到了预期效果。目前,我们能初步的控制机器人使之按照预定程序有效避障,课题目标基本达成,并采用实例展示。 有效避障运动编程关键词:避障机器人 (一)课题背景 1.项目意义 自从1959年世界上诞生了第一台机器人以来,机器人技术取得了长足的进步和发展至今已发展成为一门综合性尖端科学。机器人技术的发展集成了多学科的发展成果,代表高技术的发展前沿,是一个国家高科技水平和工业自动化程度的重要标志和体现。 随着计算机技术和遥控技术的迅猛发展,机器人正向多功能、多领域、智能化方向发展,各种用途的机器人如仿生机器人,灭火机器人,越野机器人等已开始研发、生产、应用并取得了不错的效果。而在近期发生的一系列自然灾害中避障探路机器人更是发挥了重要的作用。作为越野机器人的一个重要分支,它是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,能够在大范围运动,广泛的为人类承担各种任务,不只是搜救,更能完成深海地貌分析等多种任务。因此对越野机器人的避障技术研究无疑具有现实意义。 2.研究现状 随着计算机技术、传感器技术的发展和进步,避障探路机器人向实用化、智能化、系列化进军,日本、德国、美国都取得了各方面的先进研究成果。我国的研究从八五期间开始,至今在清华大学,哈尔滨工业大学,中科院自动化所,浙江大学等都取得了可喜的研究成果。目前,我国避障探路机器人的研究发展水平还和发达国家有一定的差距。 避障探路机器人的研究一直是一个重大的主题,它要求机器人必须能在具有障碍物的复杂环境中完成局部在线避障,需要解决三个重要问题:障碍物在空间的位置方向的精确检测;所获信息的分析和环境模型的建立;使机器人安全避障的策略。目前机器人的环境建模方法有以下几种: 可视图法(VGraph):由Nilsson在1968年提出的,其算法简单且能找到最短路径,但是由于其缺乏灵活性,在障碍物较多时,搜索时问将会很长并且要求障碍物的形状不能接近圆形,因此现在限制了其实际的应用。进而现在通常采用基于切线图法(Tangent Graph)和Voronoi法的改进可视图法。 栅格法(Grid):由W.E.Howden在1968年提出的,是目前研究较广泛的路径规划方法。其中栅格的大小影响着环境信息存储量的大小和时间的长短。栅格划