纱线检测原理
当前市场上供应的电子清纱器所应用的在线纱线测量原理两种
1.电容式
2.光电式
两者主要的不用在于测量物理原理和对纱线纵向不匀率评估。电容式传感器考虑纱线质量的改变,而光学传感器测量纱线的直径。
一些干扰疵点只有织物(梭织物或针织物)最终成形时才显示出来。又由于人眼只能感知直径的变化而不是重量的改变,所以似乎一讲到疵点,首先便是纱线的直径偏差。
另一个有利于光学式测量原理的事实是在气流纺纱时疵点所呈现的特征。绝大部分的干扰疵点是有纤维沉积物以及没有纺到纱线上的纤维丛引起的。这些疵点的纤维密度会比纱线的纤维密度低得多。因此疵点的重量方面的改变低于相应的直径方面的改变。
与电容式测量相反,光学式测量与原料类型及加工过的原料的含湿量是无关的。
光学式判定是通过测量纱线直径进行的。最新的测量方式允许对纱线直径进行直接的测量,而不需要从另个物理变量转换过来。
IQplus测量头
传感器原理
IQPLUS 清纱器的工作原理,
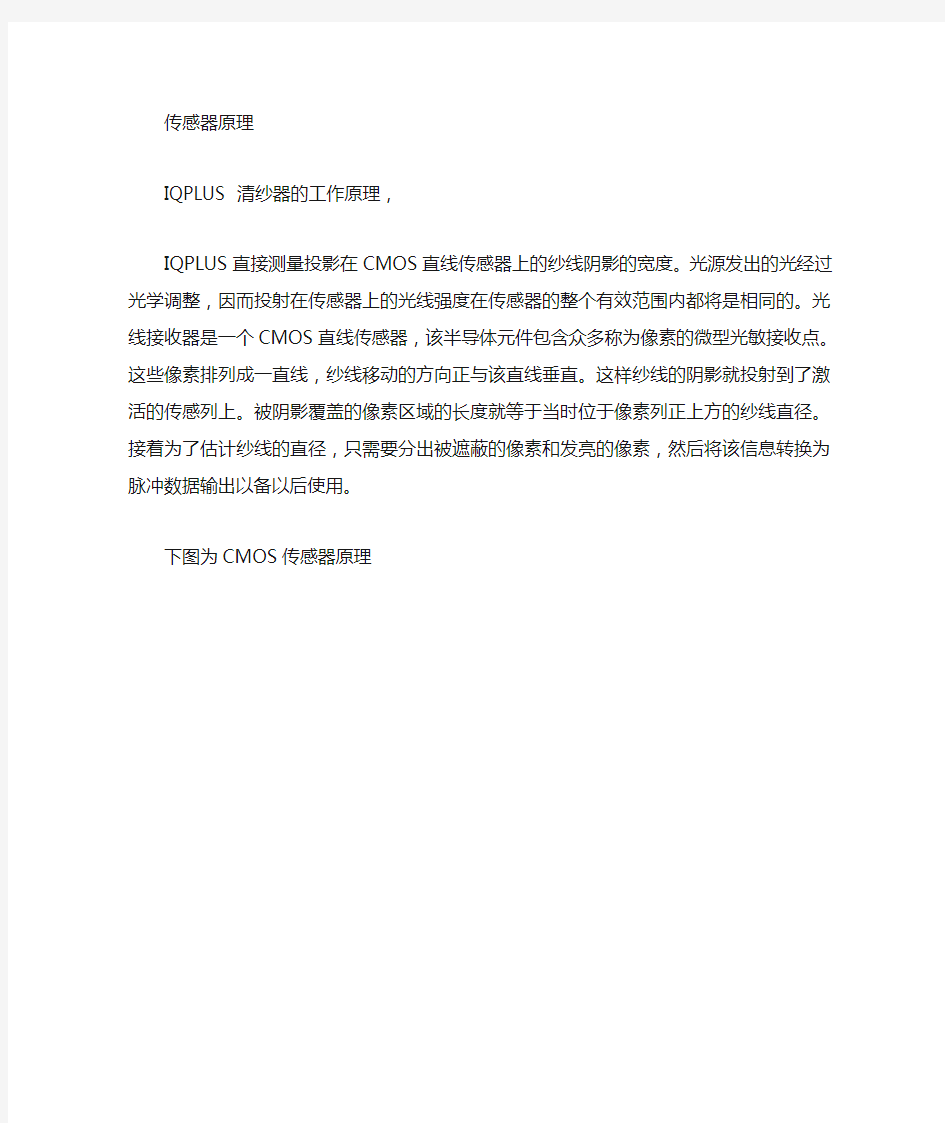
IQPLUS直接测量投影在CMOS直线传感器上的纱线阴影的宽度。光源发出的光经过光学调整,因而投射在传感器上的光线强度在传感器的整个有效范围内都将是相同的。光线接收器是一个CMOS直线传感器,该半导体元件包含众多称为像素的微型光敏接收点。这些像素排列成一直线,纱线移动的方向正与该直线垂直。这样纱线的阴影就投射到了激活的传感列上。被阴影覆盖的像素区域的长度就等于当时位于像素列正上方的纱线直径。接着为了估计纱线的直径,只需要分出被遮蔽的像素和发亮的像素,然后将该信息转换为脉冲数据输出以备以后使用。
下图为CMOS传感器原理
曝光强度评估
光源光线经过光学修正,因而在一个清洁的传感器的所有范围内投射在各单独像素上的光强都是一致的。如果光源与传感器间有障碍,那么模拟信号值就决定了覆盖各单独像素的阴影程度。完全被遮蔽的像素定义了最小曝光量,而完全明亮的像素则定义了最大的曝光水平。考虑到在生产时传感器区域内总是有杂质存在,因而单颗像素的曝光强度就介于最小值和最大值之间。为了把纱线造成的阴影和由比如灰尘等造成的区部阴影区分开来,每一颗像素的输出信号都会拿到比较器中与固定的值进行比较。该值为由纱线造成的完全阴影和由灰尘造成的局部阴影的区分定义了极限值。
曝光强度落在高于值的满光区内的像素被认为是没有被阴影覆盖的,而低于值的则被认为是受到阴影覆盖的。通过这种方式。原始的模拟信号转化为double-value(数字)
《铸铁检查井盖》检验标准(C J/T3012-1993) 中华人民共和国城镇建设行业标准 CJ/T3012-93 铸铁检查井盖 Cast iron manhole top 1、主题内容与适用范围 (1) 2、引用标准 (1) 3、术语 (1) 4、产品瑾和标记示例 (2) 5、承载等级 (2) 6、技术要求 (3) 7、试验装置及试验方法 (4) 8、检验规则 (5) 9、标志及证明书 (6) 附加说明 (6) 1、主题内容与适用范围 本标准规定了铸铁检查井盖的承载等级、技术要求、试验方法、检验规则、标志。 2、引用标准 GB 9439 灰铸铁件 GB 1348 球墨铸铁件 GB 6414-86 铸件尺寸公差 3、术语 3.1检查井 通往地下设施(如自来水、排水、电信、电力、燃气、热力、消火栓、阀门、环境卫生等)的出入口。 3.2检查井盖 检查井盖部的封闭物。由支座和井盖组成。 检查井盖中固定于检查井井口的部分。用于安放井盖。 检查井盖中未固定部分。其功能是封闭检查井口,需要时能够开启。 3.3嵌入深度 支座支承面至支座顶面的高度。 3.4缝宽 支座与井盖之间的间隙 3.5支座支承面 支承井盖的支座平面。 3.6井盖接触面 井盖与支座支承面相接触的平面。 3.7检查井盖净宽D(mm) 支座孔口的最大内切圆直径。 3.8试验荷载(井盖压力试验机) 在测试检查井盖承载能力时规定施加的荷载。 4、产品型号和标记示例 ×宽(mm),设计号四部分组成: 4.2标记示例 JG-D-600 5、承载等级 检查井盖按其承载能力不同分为重型与轻型两个等级(见表1)。 表 1
等级标志设置场合 重型重(Z)机动车行驶、停放的道路、场地 轻型轻(Q)除上述范围以外的绿地,禁止机动车通行和停放的道路、场地 6、技术要求 6.1原材料 a灰口铸铁。 b球墨铸铁 6.2检查井盖的形状宜为圆形,也可以是方形或矩形。 6.3井盖与支座间的缝宽应符合表2的要求。 表 2 检查井盖净宽JK(mm)缝宽a=(a1+a2)(mm) ≥600 8 +2 (-4) <600 6 ±2 6.4支座支承面的宽度应符合表3的要求。 表3 检查井盖净宽JK(mm)支座支承面宽度b(mm) ≥600 ≥20 <600 ≥15 6.5井盖的嵌入深度。重型检查井盖应不小于40mm,轻型检查井盖应不于30mm。 6.6井盖表面应有凸起高度应不小于3mm。 6.7井盖与支座表面应铸造平整、光滑。不得有裂纹以及有影响检查井盖使用性能的冷隔、缩松等缺陷。不得补焊。 6.8井盖与支座装配结构尺寸应符合GB6414的要求。其公差等级应不低于GB6414-86 CT10的规定并保证井盖与支座互换性。 6.9井盖接触面与支座支承面应进行机加工,保证井盖与支座接触平稳。 6.10检查井盖的承载能力应符合表4的规定。 表4 检查井盖等级试验荷载(kN)允许残留变形(mm) 重型360 1/300?D 轻型210 1/500?D 6.11井盖与支座间宜采用镀锌链条联接或其它形式的锁定装置。 7试验装置及试验方法 检查井盖应按成套产品(成套的井盖与支座)进行承载能力试验。 7.1试验荷载与允许残留变形应符合表4的规定。 7.2加载设备(井盖压力试验机) ±3%。 a刚性垫块 刚性垫块尺寸应为直径356mm、厚度等于或大于40mm、上下表面平整。 b橡胶垫片 7.3试验程序 以1-3kN/s速度加载,加载到2/3试验荷载,然后卸载。此过程重复进行5次。 第一次加载前与第5次加载后的变形之差为残留变形,其值不允许超过表4中的规定。 8、检验规则 产品检验分为出厂检验与型式检验。 8.1批量与抽样 按批量采用随机抽样方法取样。 产品以同一规格、同一种类、同一原材料在相似条件下生产的检查井盖构成批量。 一批为100套检查井盖,不足100套进也作为一批。 8.2出厂检验
角点提取与匹配算法实验报告 1 说明 本文实验的目标是对于两幅相似的图像,通过角点检测算法,进而找出这两幅图像的共同点,从而可以把这两幅图像合并成一幅图像。 下面描述该实验的基本步骤: 1.本文所采用的角点检测算法是Harris 角点检测算法,该算法的基本原理是取以目标像素点为中心的一个小窗口,计算窗口沿任何方向移动后的灰度变化,并用解析形式表达。设以像素点(x,y)为中心的小窗口在X 方向上移动u ,y 方向上移动v ,Harris 给出了灰度变化度量的解析表达式: 2 ,,|,|,,()(x y x y x u y v x y x y I I E w I I w u v o X Y ??= -=++??∑∑ (1) 其中,,x y E 为窗口内的灰度变化度量;,x y w 为窗口函数,一般定义为2 2 2 ()/,x y x y w e σ +=; I 为图像灰度函数,略去无穷小项有: 222222 ,,[()()2]2x y x y x y x y E w u I v I uvI I Au Cuv Bv = ++=++∑ (2) 将,x y E 化为二次型有: ,[]x y u E u v M v ?? =???? (3) M 为实对称矩阵: 2 ,2 x y x x y x y y I I I M w I I I ???= ???????∑ (4) 通过对角化处理得到: 11 ,200x y E R R λλ-??= ??? (5) 其中,R 为旋转因子,对角化处理后并不改变以u,v 为坐标参数的空间曲面的形状,其特征值反应了两个主轴方向的图像表面曲率。当两个特征值均较小时,表明目标点附近区域为“平坦区域”;特征值一大一小时,表明特征点位于“边缘”上;只有当两个特征值均比较大时,沿任何方向的移动均将导致灰度的剧烈变化。Harris 的角点响应函数(CRF)表达式由此而得到: 2 (,)det()(())C RF x y M k trace M =- (6)
CSDN亲密携手阿里云重磅推出云邮箱服务HTML5群组诚募管理员,“活跃之星”活动火热进行中Canny边缘检测算法原理及其VC实现详解(一) 2011-10-20 21:39560人阅读评论(0)收藏举报图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。根据作者的理解和实践,本文对边缘检测的原理进行了描述,在此基础上着重对Canny检测算法的实现进行详述。 本文所述内容均由编程验证而来,在实现过程中,有任何错误或者不足之处大家共同讨论(本文不讲述枯燥的理论证明和数学推导,仅仅从算法的实现以及改进上进行原理性和工程化的描述)。 1、边缘检测原理及步骤 在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来
就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。 在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。这就使得在边缘检测中首先要进行的工作是滤波。 1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。 2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。 3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。 2、Canny边缘检测算法原理
几种常用边缘检测算法的比较摘要:边缘是图像最基本的特征,边缘检测是图像分析与识别的重要环节。基于微分算子的边缘检测是目前较为常用的边缘检测方法。通过对Roberts,Sobel,Prewitt,Canny 和Log 及一种改进Sobel等几个微分算子的算法分析以及MATLAB 仿真实验对比,结果表明,Roberts,Sobel 和Prewitt 算子的算法简单,但检测精度不高,Canny 和Log 算子的算法复杂,但检测精度较高,基于Sobel的改进方法具有较好的可调性,可针对不同的图像得到较好的效果,但是边缘较粗糙。在应用中应根据实际情况选择不同的算子。 0 引言 边缘检测是图像分析与识别的第一步,边缘检测在计算机视觉、图像分析等应用中起着重要作用,图像的其他特征都是由边缘和区域这些基本特征推导出来的,边缘检测的效果会直接影响图像的分割和识别性能。边缘检测法的种类很多,如微分算子法、样板匹配法、小波检测法、神经网络法等等,每一类检测法又有不同的具体方法。目前,微分算子法中有Roberts,Sobel,Prewitt,Canny,Laplacian,Log 以及二阶方向导数等算子检测法,本文仅将讨论微分算子法中的几个常用算子法及一个改进Sobel算法。 1 边缘检测
在图像中,边缘是图像局部强度变化最明显的地方,它主要存在于目标与目标、目标与背景、区域与区域( 包括不同色彩) 之间。边缘表明一个特征区域的终结和另一特征区域的开始。边缘所分开区域的内部特征或属性是一致的,而不同的区域内部特征或属性是不同的。边缘检测正是利用物体和背景在某种图像特征上的差异来实现检测,这些差异包括灰度、颜色或纹理特征,边缘检测实际上就是检测图像特征发生变化的位置。边缘的类型很多,常见的有以下三种: 第一种是阶梯形边缘,其灰度从低跳跃到高; 第二种是屋顶形边缘,其灰度从低逐渐到高然后慢慢减小; 第三种是线性边缘,其灰度呈脉冲跳跃变化。如图1 所示。 (a) 阶梯形边缘(b) 屋顶形边缘 (b) 线性边缘 图像中的边缘是由许多边缘元组成,边缘元可以看作是一个短的直线段,每一个边缘元都由一个位置和一个角度确定。边缘元对应着图像上灰度曲面N 阶导数的不连续性。如果灰度曲面在一个点的N 阶导数是一个Delta 函数,那么就
《铸铁检查井盖》检验标准(CJ/T3012-1993) 中华人民共和国城镇建设行业标准 CJ/T3012-93 铸铁检查井盖 Cast iron manhole top 1、主题内容与适用范围 (1) 2、引用标准 (1) 3、术语 (1) 4、产品瑾和标记示例 (2) 5、承载等级 (2) 6、技术要求 (3) 7、试验装置及试验方法 (4) 8、检验规则 (5) 9、标志及证明书 (6) 附加说明 (6) 1、主题内容与适用范围 本标准规定了铸铁检查井盖的承载等级、技术要求、试验方法、检验规则、标志。 2、引用标准 GB 9439 灰铸铁件 GB 1348 球墨铸铁件 GB 6414-86 铸件尺寸公差 3、术语 3.1检查井 通往地下设施(如自来水、排水、电信、电力、燃气、热力、消火栓、阀门、环境卫生等)的出入口。 3.2检查井盖 检查井盖部的封闭物。由支座和井盖组成。 检查井盖中固定于检查井井口的部分。用于安放井盖。 检查井盖中未固定部分。其功能是封闭检查井口,需要时能够开启。 3.3嵌入深度 支座支承面至支座顶面的高度。 3.4缝宽 支座与井盖之间的间隙 3.5支座支承面 支承井盖的支座平面。 3.6井盖接触面 井盖与支座支承面相接触的平面。 3.7检查井盖净宽D(mm) 支座孔口的最大内切圆直径。 3.8试验荷载(井盖压力试验机) 在测试检查井盖承载能力时规定施加的荷载。 4、产品型号和标记示例 ×宽(mm),设计号四部分组成: 4.2标记示例 JG-D-600
5、承载等级 检查井盖按其承载能力不同分为重型与轻型两个等级(见表1)。 表 1 等级标志设置场合 重型重(Z)机动车行驶、停放的道路、场地 轻型轻(Q)除上述范围以外的绿地,禁止机动车通行和停放的道路、场地 6、技术要求 6.1原材料 a灰口铸铁。 b球墨铸铁 6.2检查井盖的形状宜为圆形,也可以是方形或矩形。 6.3井盖与支座间的缝宽应符合表2的要求。 表 2 检查井盖净宽JK(mm)缝宽a=(a1+a2)(mm) ≥600 8 +2 (-4) <600 6 ±2 6.4支座支承面的宽度应符合表3的要求。 表3 检查井盖净宽JK(mm)支座支承面宽度b(mm) ≥600 ≥20 <600 ≥15 6.5井盖的嵌入深度。重型检查井盖应不小于40mm,轻型检查井盖应不于30mm。 6.6井盖表面应有凸起高度应不小于3mm。 6.7井盖与支座表面应铸造平整、光滑。不得有裂纹以及有影响检查井盖使用性能的冷隔、缩松等缺陷。不得补焊。 6.8井盖与支座装配结构尺寸应符合GB6414的要求。其公差等级应不低于GB6414-86 CT10的规定并保证井盖与支座互换性。 6.9井盖接触面与支座支承面应进行机加工,保证井盖与支座接触平稳。 6.10检查井盖的承载能力应符合表4的规定。 表4 检查井盖等级试验荷载(kN)允许残留变形(mm) 重型360 1/300?D 轻型210 1/500?D 6.11井盖与支座间宜采用镀锌链条联接或其它形式的锁定装置。 7试验装置及试验方法 检查井盖应按成套产品(成套的井盖与支座)进行承载能力试验。 7.1试验荷载与允许残留变形应符合表4的规定。 7.2加载设备(井盖压力试验机) ±3%。 a刚性垫块 刚性垫块尺寸应为直径356mm、厚度等于或大于40mm、上下表面平整。 b橡胶垫片 7.3试验程序 以1-3kN/s速度加载,加载到2/3试验荷载,然后卸载。此过程重复进行5次。 第一次加载前与第5次加载后的变形之差为残留变形,其值不允许超过表4中的规定。
**************公司 产品出厂检验报告 标识卡 文件编号: 产品型号: 产品编号: 检测部门: 时间:年月日
编号: 产品名称规格型号产品编号检验日期抽样地点抽样基数检验项数检验地点 检验依据(企标) 检验结论 依据检验所列项目要求,所检产品符企业标准要求,产品合格。 备注 审核:批准:检验员:
序号检验 项目 技术要求 检验 结果 结论 备 注 1 外观标识卡表面不应有明显的凹痕、划伤、裂缝和变形,表面涂镀层应均匀,不应起泡、龟裂和脱落;金属零部件不应有腐蚀和其他机械损伤;零部件应紧固无松动,插接的活动部件应插接自如;说明功能的符号文字及标识卡的所有标志应清晰端正、安装牢固;紧固件应有防止自动松脱的措施;金属件应进行防锈、防蚀处理。 2主要 技术 指标 工作 稳定 性要 求 标识卡连续运行7d,主要技术指标和功能应 符合4.4的规定 锂电池工作电压(V): 3.7V DC 工作电流(mA):≤130mA 最大位移速度:5m/s 待机时间:不小于7d 无线 信号 传输 工作频率:2.405GHz-2.485GHz 传输方式:无线同频半双工 调制方式:CSS 无线通信距离(空旷地带)不小于50m 发射功率:不大于0dBm 接收灵敏度:-95 dBm 覆盖范围(m):100(开放空间) 基 本 功 能 具有配合KBA3.7W矿用本安型网络摄像仪实 时跟踪作业人员位置的功能 具有连续服务功能 具有越区切换功能
具有数据传输功能 具有备用电池过放电告警及过充过放保护功能 具有显示跟踪终端编号的功能 3 电源 波动 适应 能力 (3. 6VDC ) 无线 信号 传输 工作频率:2.405GHz-2.485GHz 传输方式:无线同频半双工 调制方式:CSS 无线通信距离(空旷地带)不小于50m 发射功率:不大于0dBm 接收灵敏度:-95dBm 基本 功能 具有配合KBA3.7W矿用本安型网络摄像仪实 时跟踪作业人员位置的功能 具有连续服务功能 具有越区切换功能 具有数据传输功能 具有备用电池过放电告警及过充过放保护功 能 具有显示跟踪终端编号的功能 电源 波动 适应 能力 (4. 2VDC 无线 信号 传输 工作频率:2.405GHz-2.485GHz 传输方式:无线同频半双工 调制方式:CSS
课程设计报告 设计题目:数字图像处理中的边缘检测技术学院: 专业: 班级:学号: 学生姓名: 电子邮件: 时间:年月 成绩: 指导教师:
数字图像处理中的边缘检测技术课程设计报告I 目录 1 前言:查阅相关文献资料,了解和掌握基本原理、方法和研究现状,以及实际应用的背景意义 (1) 1.1理论背景 (1) 1.2图像边缘检测技术研究的目的和意义 (1) 1.3国内外研究现状分析 (2) 1.4常用边缘检测方法的基本原理 (3) 2 小波变换和小波包的边缘检测、基于数学形态学的边缘检测法算法原理 (7) 2.1 小波边缘检测的原理 (7) 2.2 数学形态学的边缘检测方法的原理 (7) 3 算法实现部分:程序设计的流程图及其描述 (9) 3.1 小波变换的多尺度边缘检测程序设计算法流程图 (9) 3.2 数学形态学的边缘检测方法程序设计算法描述 (10) 4实验部分:对所给的原始图像进行对比实验,给出相应的实验数据和处理结果 (11) 5分析及结论:对实验结果进行分析比较,最后得出相应的结论 (15) 参考文献 (17) 附录:代码 (18)
1前言 查阅相关文献资料,了解和掌握基本原理、方法和研究现状,以及实际应用的背景意义 1.1 理论背景 图像处理就是对图像信息加工以满足人的视觉心理或应用需求的方法。图像处理方法有光学方法和电子学方法。从20世纪60年代起随着电子计算机和计算技术的不断提高和普及,数字图像处理进入了高速发展时期,而数字图像处理就是利用数字计算机或其它的硬件设备对图像信息转换而得到的电信号进行某些数学处理以提高图像的实用性。 图像处理在遥感技术,医学领域,安全领域,工业生产中有着广泛的应用,其中在医学应用中的超声、核磁共振和CT等技术,安全领域的模式识别技术,工业中的无损检测技术尤其引人注目。 计算机进行图像处理一般有两个目的:(1)产生更适合人观察和识别的图像。 (2)希望能由计算机自动识别和理解图像。数字图像的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域的重要基础,图像处理和分析的第一步往往就是边缘检测。 物体的边缘是以图像的局部特征不连续的形式出现的,也就是指图像局部亮度变化最显著的部分,例如灰度值的突变、颜色的突变、纹理结构的突变等,同时物体的边缘也是不同区域的分界处。图像边缘有方向和幅度两个特性,通常沿边缘的走向灰度变化平缓,垂直于边缘走向的像素灰度变化剧烈。根据灰度变化的特点,图像边缘可分为阶跃型、房顶型和凸缘型。 1.2 图像边缘检测技术研究的目的和意义 数字图像处理是伴随着计算机发展起来的一门新兴学科,随着计算机硬件、软件的高度发展,数字图像处理也在生活中的各个领域得到了广泛的应用。边缘检测技术是图像处理和计算机视觉等领域最基本的技术,如何快速、精确的提取图像边缘信息一直是国内外研究的热点,然而边缘检测也是图像处理中的一个难题。 首先要研究图像边缘检测,就要先研究图像去噪和图像锐化。前者是为了得到飞更真实的图像,排除外界的干扰,后者则是为我们的边缘检测提供图像特征更加明显的图片,即加大图像特征。两者虽然在图像处理中都有重要地位,但本次研究主要是针对图像边缘检测的研究,我们最终所要达到的目的是为了处理速
角点检测技术方法概述 角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三维建模和目标识别等领域中。也称为特征点检测。 角点通常被定义为两条边的交点,更严格的说,角点的局部邻域应该具有两个不同区域的不同方向的边界。而实际应用中,大多数所谓的角点检测方法检测的是拥有特定特征的图像点,而不仅仅是“角点”。这些特征点在图像中有具体的坐标,并具有某些数学特征,如局部最大或最小灰度、某些梯度特征等。 现有的角点检测算法并不是都十分的鲁棒。很多方法都要求有大量的训练集和冗余数据来防止或减少错误特征的出现。角点检测方法的一个很重要的评价标准是其对多幅图像中相同或相似特征的检测能力,并且能够应对光照变化、图像旋转等图像变化。 Moravec角点检测算法 Moravec角点检测算法是最早的角点检测算法之一。该算法将角点定义为具有低“自相关性”的点。算法会检测图像的每一个像素,将像素周边的一个邻域作为一个patch,并检测这个patch和周围其他patch的相关性。这种相关性通过两个patch间的平方差之和(SSD)来衡量,SSD值越小则相似性越高。 如果像素位于平滑图像区域内,周围的patch都会非常相似。如果像素在边缘上,则周围的patch在与边缘正交的方向上会有很大差异,在与边缘平行的方向上则较为相似。而如果像素是各个方向上都有变化的特征点,则周围所有的patch都不会很相似。 Moravec会计算每个像素patch和周围patch的SSD最小值作为强度值,取局部强度最大的点作为特征点。 Harris角点检测算法 Moravec角点检测算法有几个很明显的缺陷: 1,强度值的计算并不是各向同性的,只有离散的8个45度角方向被考虑。因为patch的评议比较最多只有8个方向; 2,由于窗口是方形并且二元的,因此相应函数会有噪声; 3,对边缘的相应太简单,因为强度值尽取SSD的最小值;
边缘检测原理的论述
摘要 数字图像处理技术是信息科学中近几十年来发展最为迅速的学科之一。图像边缘是图像最基本的一种特征,边缘在图像的分析中起着重要的作用。边缘作为图像的一种基本特征,在图像识别、图像分割、图像增强以及图像压缩等的领域中有较为广泛的应用,其目的就是精确定位边缘,同时更好地抑制噪声。目前,数字图像处理技术被广泛应用于航空航天、通信、医学及工业生产等领域中。图像边缘提取的手段多种多样,本文主要通过MATLAB语言编程分别用不同的算子例如Roberts算子、Prewitt算子、Sobel算子、Kirsch 算子、Laplacian算子、Log算子和Canny算子等来实现静态图像的边缘检测,并且和检测加入高斯噪声的图像进行对比。阐述了不同算子在进行图像边缘提取的特点,并在此基础上提出利用小波变换来实现静态图像的边缘检测。 【关键字】图像边缘数字图像边缘检测小波变换 背景 图像处理就是对图像信息加工以满足人的视觉心理或应用需求的方法。图像处理方法有光学方法和电子学方法。从20世纪60年
代起随着电子计算机和计算技术的不断提高和普及,数字图像处理进入了高速发展时期,而数字图像处理就是利用数字计算机或其它的硬件设备对图像信息转换而得到的电信号进行某些数学处理以提高图像的实用性。 计算机进行图像处理一般有两个目的:(1)产生更适合人观察和识别的图像。(2)希望能由计算机自动识别和理解图像。数字图像的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域的重要基础,图像处理和分析的第一步往往就是边缘检测。 边缘是图象最基本的特征.边缘检测在计算机视觉、图象分析等应用中起着重要的作用,是图象分析与识别的重要环节,这是因为子图象的边缘包含了用于识别的有用信息.所以边缘检测是图像分析和模式识别的主要特征提取手段。 所谓边缘是指其周围像素灰度后阶变化或屋顶状变化的那些像素的集合,它存在于目标与背景、目标与目标、区域与区域,基元与基元之间。因此它是图象分割所依赖的重要的特征,也是纹理特征的重要信息源和形状特征的基础;而图象的纹理形状特征的提取又常常依赖于图象分割。图象的边缘提取也是图象匹配的基础,因为它是位置的标志,对灰度的变化不敏感,它可作为匹配的特征点。 图象的其他特征都是由边缘和区域这些基本特征推导出来 的.边缘具有方向和幅度两个特征.沿边缘走向,像素值变化比较平缓;而垂直与边缘走向,则像素值变化比较剧烈.而这种剧烈可能呈
Harris角点检测算法编程步骤及示例演示 也不说那么多废话了,要介绍啥背景意义之类的,角点检测,顾名思义,就是检测角点,最简单的就是两条线的交点了,还有比如下国际象棋的棋盘格子的交点之类的,反正就是检测这些点。 简单将Harris角点检测算法的思想说下,就是拿一个小窗在图像中移动,通过考察这个小窗口内图像灰度的平均变换值来确定角点。(1)如果窗口内区域图像的灰度值恒定,那么所有不同方向的偏移几乎不发生变化; (2)如果窗口跨越一条边,那么沿着这条边的偏移几乎不发生变化,但是与边垂直的偏移会发生很大的变化; (3)如果窗口包含一个孤立的点或者角点,那么所有不同方向的偏移会发生很大的变化。 下面给出具体数学推导: 设图像窗口平移量为(u,v),产生的灰度变化为E(u,v), 有E(u,v)=sum[w(x,y)[I(x+u,y+v)-I(x,y)]^2],其中w(x,y)为窗口函数, I(x+u,y+v)为平移后的灰度值,I(x,y)为平移前的灰度值。 有泰勒公式展开可得: I(x+u,y+v)=I(x,y)+Ix*u+Iy*v+O(u^2,v^2); Ix,Iy分别为偏微分,在图像中为图像的方向导数. 因此E(u,v)=sum[w(x,y) [Ix*u+Iy*v+O(u^2,v^2)]^2], 可以近似得到E(u,v)=sum[w(x,y) [Ix*u+Iy*v]^2],即 E(u,v)=[u,v][Ix^2,Ix*Iy;Ix*Iy,Iy^2][u,v]T
令M=[Ix^2,Ix*Iy;Ix*Iy,Iy^2],因此最后对角点的检测成了对矩阵M的特征值的分析了,令M其特征值为x1,x2; 当x1>>x2或者x2>>x1,则检测到的是边缘部分; 当x1,x2都很小,图像窗口在所有移动的方向上移动灰度级都无明显变化. 当X1,X2都很大时且相当,检测到的是角点。 编程时用x1,x2不方便,因此定义角点响应函数; R=det(M)-k(trace(M))^2; 其中det(M)为矩阵M的行列式,trace(M)为矩阵M的迹。 下面给出更具数学公式实际编程的步骤: 1.利用水平,竖直差分算子对图像的每个像素进行滤波以求得 Ix,Iy,进而求得M中的四个元素的值。 M=[Ix^2,Ix*Iy;Ix*Iy,Iy^2] 2.对M的四个元素进行高斯平滑滤波,为的是消除一些不必要 的孤立点和凸起,得到新的矩阵M。 3.接下来利用M计算对应每个像素的角点响应函数R,即: R=det(M)-k(trace(M))^2; 也可以使用改进的R: R=[Ix^2*Iy^2-(Ix*Iy)^2]/(Ix^2+Iy^2);里面没有随意给定的参数k,取值应当比第一个令人满意。 4.在矩阵R中,同时满足R(i,j)大于一定阈值threshold和R(i,j)
数字图像处理实验报告 学生姓名王真颖 学生学号L0902150101 指导教师梁毅雄 专业班级计算机科学与技术1501 完成日期2017年11月06日
计算机科学与技术系信息科学与工程学院
目录 实验一.................................................................................................. 错误!未定义书签。 一、实验目的.................................................................................................... 错误!未定义书签。 二、实验基本原理 ........................................................................................... 错误!未定义书签。 三、实验内容与要求....................................................................................... 错误!未定义书签。 四、实验结果与分析....................................................................................... 错误!未定义书签。实验总结............................................................................................... 错误!未定义书签。参考资料.. (3) 实验一图像分割与边缘检测 一.实验目的 1. 理解图像分割的基本概念; 2. 理解图像边缘提取的基本概念; 3. 掌握进行边缘提取的基本方法;
检查井盖、雨水篦子技术规范
检查井盖、雨水篦子技术标 1、适用范围:此技术标适应于小市政、绿化工程中使用的检查 井盖 2、检查井盖的使用范围:在园区机动车沥青道路上采用重型球 墨铸铁井盖;园区有铺装要求的机动车道路上采用普型、聚合物基复合材料检查井盖;园区内非机动车道路采用聚合物基复合材料检查井盖,园区绿地内的检查井采用钢纤维混凝土检查井盖;机动车道的雨水口采用重型球墨雨水篦子;下沉式庭院采用雨水篦子采用普型、聚合物基复合材料水篦;绿地部分的雨水篦子采用混凝土雨水篦子。 3、球墨铸铁井盖、雨水篦子 3.1 原材料要求:采用球墨铸铁,制作井盖的原材料应符合 GB1348的规定。雨水篦子采用球墨铸铁QT500-7, 3.2,井盖的样式有方形、圆形,可根据工程的实际进行选用。 雨水篦子根据设计进行选型。 3.3、井盖的嵌入深度:重型检查井盖的嵌入深度不小于 40mm
3.4、井盖应有的凸起的高度不应小于3mm. 3.5、井盖、雨水篦子应与支座表面制作平整、光滑,不得有 裂纹以及影响检查井盖使用性能的冷隔,缩松等缺陷,不 得补焊。 3.6、井盖与支座的装配结构尺寸应符合GB6414的要求,其公 差等级不应低于GB6414-86CT10的规定,并保证井盖与支 座互换性。 3.7、井盖的接触面与支座的支撑面进行机加工,保证井盖与 支座的接触平稳。 3.8、井盖的承载能力不小于360KN,允许残留变形为1/300*D, 雨水篦子的承载能力不小于140KN。 3.9、井盖与支座间应采用镀锌链条连接或其它形式的锁定装 置。篦子与井圈能够经过销轴(或其它的形式)相系,其篦 子的翻转角度不小于120°篦子与井圈的防腐做法为:沥 青清漆一遍。 3.10、井盖的实验装置、实验方法及实验结果应满足<铸铁检 查井盖>检验标准 (CJ/T3012-1993)第七条的要求。,各 类雨水口可变载荷标准值取汽车载荷等级城-A级,对于 雨水篦子及井圈,使用时可按此标准进行出厂检验。 3.11、标志及证明书:井盖上应能反映专用标志、承重等级、 生产日期。出厂合格证、检测报告等技术文件。 4、聚合物基复合材料检查井盖
本科毕业论文(设计、创作) 题目:数字图像边缘检测算法设计与实现 学生姓名:学号:023******* 所在院系:信息与通信技术系专业:电子信息工程 入学时间:2010 年9 月导师姓名:职称/学位:讲师/博士 导师所在单位: 完成时间:2014 年 5 月 安徽三联学院教务处制
数字图像边缘检测算法设计与实现 摘要:图像有很多最基本的特征,边缘是其中之一,所以图像处理的主要内容中也有图像的边缘检测,图像的边缘检测也是图像测量技术中的热点。本篇论文是来研究图像边缘检测,图像处理技术已经有很广阔的应用域,图像的边缘检测最主要的意思是将图像的边缘提取出来。本文首先简要的介绍了什么是边缘检测,和边缘检测的一些基本知识和原理,然后回顾了一些经典的边缘检测算法。最后在已有的经典算法基础上进行编程仿真来提取图像的边缘。 关键词:图像处理;边缘检测;Hough变换;轮廓跟踪
Design and implementation the algorithm of digital image edge detection Abstract:Images have a lot of the most basic features, edge is one of them. So the image edge detection is one of the main content for image processing, the image edge detection has been the hot point in image measurement technology. This paper is to study the image edge detection. Image processing technology has very broad application field. The main mean of image edge detection is to detect image edge. In this article, first, briefly introduced what is edge detection, and some basic knowledge and principle of edge detection. Then reviews some of the classical edge detection algorithm. Finally, extracting image edge programming simulation on the basis of the existing classic algorithms. Key words: Image Processing, Edge Detection, Hough manipulation, contour tracing
Canny边缘检测 图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。根据作者的理解和实践,本文对边缘检测的原理进行了描述,在此基础上着重对Canny检测算法的实现进行详述。 本文所述内容均由编程验证而来,在实现过程中,有任何错误或者不足之处大家共同讨论(本文不讲述枯燥的理论证明和数学推导,仅仅从算法的实现以及改进上进行原理性和工程化的描述)。 1、边缘检测原理及步骤 在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。 在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。这就使得在边缘检测中首先要进行的工作是滤波。 1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。 2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。
角点检测算法综述 范娜,俞利,徐伯夏 (中国航天科工集团第三研究院8357所天津300308) 摘要:角点作为图像的一个重要特征,它保留了图像绝大部分的特征信息。角点在三维场景重建、运动估计、目标跟踪以及图像配准与图像匹配等计算机视觉领域有着重要的作用。本文对角点检测算法的类别进行总结,对各类算法进行了详细介绍,并对近几年来各类算法发展与改进进行了总结。 关键词:特征信息;计算机视觉;角点检测 Survey of Corner Detection Algorithms FAN Na, YU Li, and XU Bo-xia (The 8357 Research Institute of the Third Research Academy of CASIC Tianjin 300308) Abstract:As a more important feature of image, corner contains voluminous information of image features.In the domain of computer vision, such as three-dimensional reconstruction, motion estimation, object tracking, image registration and image matching, corner of image play an important role.this paper attempt to summarize and detailedly introduce corner detection algorithms, and summarize the developments of these algorithms in recent years. Key words: Feature Information;Computer Vision;Corner Detection 1 引言 角点并没有明确的定义,一般将图像中亮度变化剧烈的点或图像边缘上曲率取极大值的点认为是角点。从形态上来说,角点包括L、T、Y、X和箭头型角点等。角点作为图像的重要特征,保留了图像的绝大部分的特征信息,又有效地减少了信息的数据量,从而有效地提高了运算速度以及匹配的可靠性。总结现有的角点检测算子的评价方法,总体上有以下几个标准[1]: (1)稳定性:即同一场景图像在亮度、对比度等因素变化的情况下,检测出的角点数目及位置应当稳定 (2)可靠性:即在算子的可变参数改变情况下,不影响生成的角点的质量,只改变检测出角点的数目;检测到的角点具有平移、旋转、伸缩不变性 (3)鲁棒性:即算法的抗噪性能,在一定的噪声干扰下,算子仍然具有很强的角点检测能力 (4)准确性:主要指不发生误检测以及角点位置定位准确 (5)高效性:是指算法的计算速度快慢,算法速度必须足够快以满足图像处理系统的要求 经过几十年的研究与探索,产生了许多检测角点的方法,但大致可以分为四类:基于灰度图像的角点检测算法、基于二值图像的角点检测算法、基于边缘特征的角点检测算法以及支持矢量机角点检测算法。本文中
以下代码实现了最简单的Roberts算子边缘检测,输入为width*height的灰度图,存放在矩阵src中,输出也为width*height的灰度图(象素取值在0-255之间),存放在矩阵dst中。 程序代码: void Roberts(BYTE *dst,BYTE *src,int width,int height) { int A, B; // A(x-1, y-1) B(x, y-1) int C, D; // C(x-1, y) D(x, y) int x; int y; for (x = 0; x < width; x++) { *dst = 0; dst++; } // 指向第一行 src += width; // 不处理最上边和最左边 for (y = 1; y < height; y++) { // 指向每行第一列 *dst = 0; src++; dst++; for (x = 1; x < width; x++)
{ A = *(src - width - 1); B = *(src - width); C = *(src - 1); D = *src; int temp = (int)(sqrt((A - D) * (A - D) + (B - C) * (B - C))); // 越界判断0 -- 255 if(temp >= 255) { *dst = 255; } else { *dst = (BYTE)temp; } src++; dst++; } // x } // y return; } // end of Roberts
实验二、灰度图像边缘检测 一、实验目的 1.掌握各种边缘检测算子的概念及原理。 2.掌握各种边缘检测算子的算法。 3.掌握各种边缘检测算子matlab实现的编制方法。 4.启发学生依据边缘特征进行图像分析与识别,提高学生图像处理与分析能力和实际动手能力。 二、实验原理 基于算子模板的卷积过程,比如有一张8x8的图片,像素矩阵如下: 又有一个3x3的算子模板矩阵如下:
整个模板卷积过程就是用模板覆盖在像素矩阵上,重新计算像素值并移 动的过程。如下图即为模板盖住左上角的示例。 计算方式为模板单元格的值与被模板覆盖的图像子矩阵的值分别相乘并和并把结果放在模板中央单元格所对应的图像矩阵单元格中。上图模板中央对应单元格的值应为: 12*0+23*(-1)+52*0+12*(-1)+0*4+0*(-1)+56*0+45*(-1)+47*0=-80。 各算子模板如下: 1. Roberts 算子 10010110????????--???? 2. 拉普拉斯边缘算子 010111141181010111????????-????????????
3. Kirsch 边缘算子 33535555555330530530350333533333333304590135----????????????????-----????????????????-----------???????? ???? 533333333333503503303305533553555355180225270315-----------????????????????-----????????????????----???????? ? ? ? ? 4. 高斯-拉普拉斯算子 -2-4-4-4-2-4080-4-48248-4-4080-4-2-4-4-4 -2?? ??? ???? ??????? 5. Prewitt 边缘算子 101111101000101111----?? ?? ????-????????-?? ?? 6. Sobel 算子 三、实验仪器和设备 PC 机1台,原始灰度图像文件,matlab 编程软件 四、预习要求