
模拟路灯控制系统实验指导
一、任务和要求
1、任务
设计并制作一套模拟路灯控制系统。控制系统结构如图1所示,路灯布置如图2所示。
图1 路灯控制系统示意图
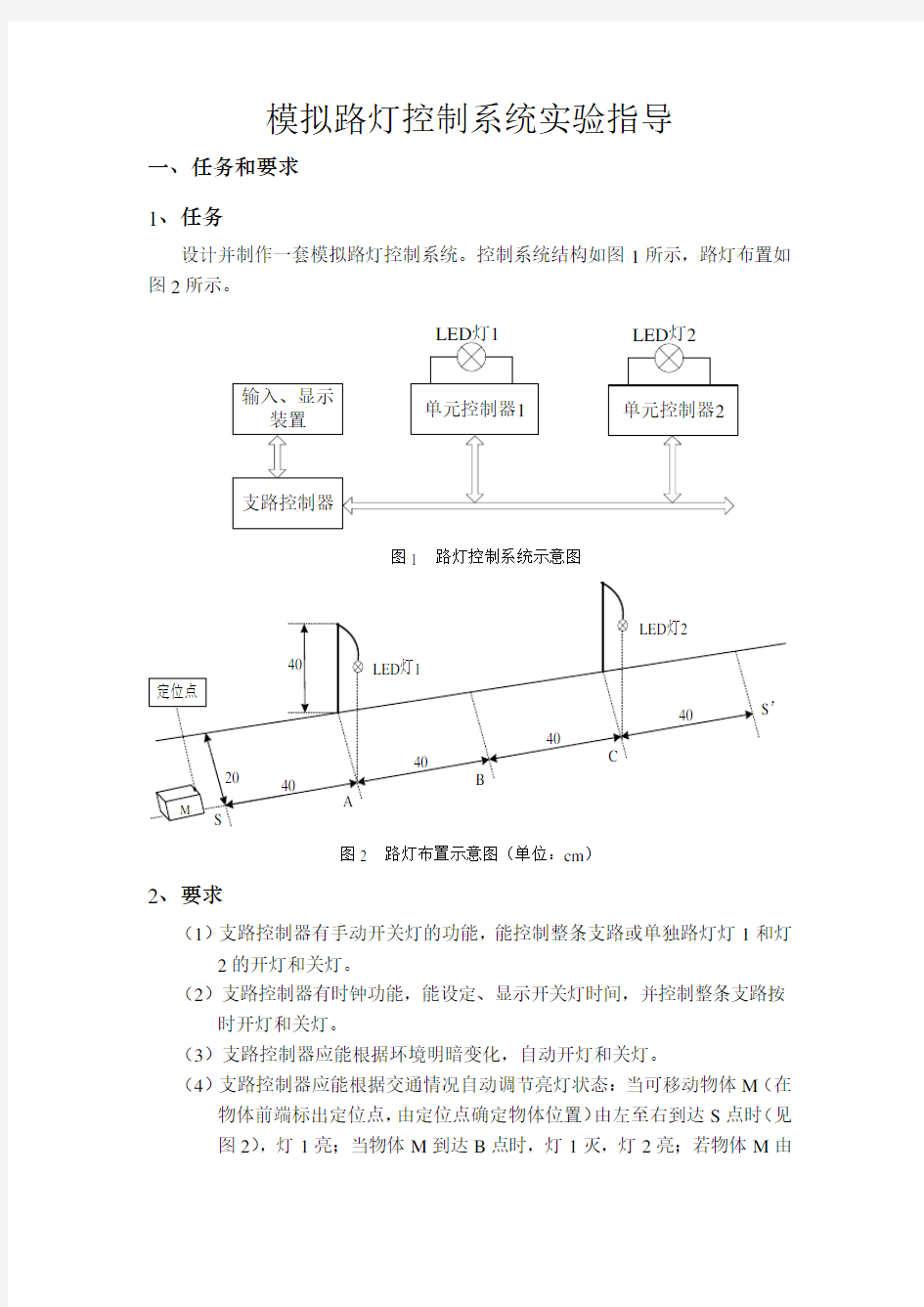
图2 路灯布置示意图(单位:cm)
2、要求
(1)支路控制器有手动开关灯的功能,能控制整条支路或单独路灯灯1和灯2的开灯和关灯。
(2)支路控制器有时钟功能,能设定、显示开关灯时间,并控制整条支路按时开灯和关灯。
(3)支路控制器应能根据环境明暗变化,自动开灯和关灯。
(4)支路控制器应能根据交通情况自动调节亮灯状态:当可移动物体M(在物体前端标出定位点,由定位点确定物体位置)由左至右到达S点时(见
图2),灯1亮;当物体M到达B点时,灯1灭,灯2亮;若物体M由
右至左移动时,则亮灯次序与上相反。
(5)支路控制器能分别独立控制每只路灯的开灯和关灯时间。
(6)当路灯出现故障时(灯不亮),支路控制器应发出声光报警信号,并显示有故障路灯的地址编号。
3、说明
1)光源采用1 W的LED灯,LED的类型不作限定。
2)系统中不得采用接触式传感器。
4.基本要求(3)需测定可移动物体M上定位点与过“亮灯状态变换点”(S、B、S’等点)垂线间的距离,要求该距离≤2cm。
二、系统的总体方案
根据设计的基本要求,系统实现的主要功能有:能通过按键进行手动的开灯和关灯;能实时显示时间并按设定开灯、关灯时间;根据环境明暗变化,能自动开灯和关灯;根据交通情况自动调节灯亮状态。能分别独立控制每只路灯的开关时间;能检测故障,检测到故障会进行声光报警,并显示出故障路灯的地址编码。系统设计包含以下几个基本模块:控制模块、信息显示模块、键盘模块、路灯模块、位置探测模块、光亮度检测模块。总的系统框图如图3所示。
图3
1、控制模块
控制器采用51系列单片机,51系统单片机是一种最常用的单片机,其最大的特点是系统结构合理、技术成熟、成本低、容易学习,方便用软件编程实现各种算法与逻辑控制,广泛应用于各种控制领域。单片机系统实现的主要功能有,完成数字及控制信号的输入、数据及工作状态的显示以及路灯电路的的驱动与控制。
2、显示模块
显示模块用来实现交互菜单、提示信息、时间、系统工作状态等信息的显示。显示器件可选用字符型液晶器LCD 1602,LCD1602显示的内容为16X2,即可以显示两行,每行16个字符液晶模块(显示字符和数字)。
市面上字符液晶大多数是基于HD44780液晶芯片的,控制原理是完全相同的,因此基于HD44780写的控制程序可以很方便地应用于市面上大部分的字符型液晶。该显示器能基本满足本系统显示的需要。
3、键盘模块
根据系统的设计要求,键盘要能输入0-9共10数码、确认、退出等信号,所以用4*4矩阵键盘。
4、路灯模块
51单片机I/O口为集电极上拉输出方式,高电平输出电流等于上拉电阻的电流,这个电流比较小,低电平输出是内部晶体管吸收的电流,最大可以达到10mA,但是整个端口的总电流不能超过24mA。所以,51单片机I/O口用来驱动普通小功率的没有问题。因本系统中采用的是1W的LED灯,1W的LED灯需要200mA的电流才能工作,故不能用直接用I/O口来驱动它工作。本方案采用大功率的MOS驱动1WLED灯工作。
5、位置探测模块
采用ST188红外对射传感器感测是否有物体通过,当没有物体通过时ce截止,单片机采到的电压值为低电平;当有物体经过时be导通,电源电压加到E 端,单片机采到的电压值为高电平。ST188的内部结构图如图4,K端接510Ω电阻,E端接20K电阻,A和C端接+5V的电压。
图4 ST188内部结构图
6、光亮度检测模块。
光敏电阻随着光线变强电阻值会变小,光线变弱阻值会变大。根据光敏电阻
的工作特性,按照路灯实际工作情况,可以设定一个阈值亮度,当环境亮度低于这个亮度时,使电压比较器输出高电平,单片机采集到高电平后开灯,反之,单片机采集到的低电平后关灯。
三、系统设计
根据系统的设计要求,系统由手动开关灯、定时开关灯、根据环境明亮开关灯、根据交通情况开关灯和路灯检测等模块组成。下面分别介绍各个模块的硬件和软件的设计。
(一)手动开关灯模块
实验目的:
1、掌握单片机小系统的的设计
2、掌握路灯硬件电路的设计
3、掌握手动开关灯模块软件的设计
软硬件设计:
1、单片机小系统的设计
根据设计要求,控制系统要通过良好的人机交换界面完成系统的所有控制功能。微控制器选用89S51(52)单片机,键盘选用4*4键盘,显示器选用16*2的液晶显示器LCD1602。单片机小系统PROTEUS中的仿真原理图5如下:
2、路灯电路设计
51单片机I/O口为集电极上拉输出方式,高电平输出电流等于上拉电阻的电流,这个电流比较小,低电平输出是内部晶体管吸收的电流,最大可以达到10mA,但是整个端口的总电流不能超过24mA。所以,51单片机I/O口用来驱动普通小功率的没有问题。因本系统中采用的是1W的LED灯,1W的LED灯需要200mA的电流才能工作,故不能用直接用I/O口来驱动它工作。本方案采用大功率的MOS驱动1WLED灯工作。具体电路图6,其工作原理为,N沟道增强型场效应管Q1和Q2分别接P0^0和P0^1口,当P0^0和P0^1输出高电平时,场效应用Q1和Q2导通,LED 灯D1和D2开灯,反之,LED灯D1和D2关灯。
图6
在面包板上安装如上图电路并测试。
3、单片机程序设计
1)单片机端口和电路的连接
P00—D1灯,P01—D2灯
P30-P33接键盘行扫描线,P34-P37接键盘列扫描线
P00-P07接LCD1602的D0-D7
P25接LCD1602的RW, P26接LCD1602的RS, P27接LCD1602的EN,
2)提供的C程序头文件和文档
①LCD1602PDF文档,介绍LCD1602的原理与应用。
②头文件LCD1602.h
函数:LCD_init()液晶显示器初始化函数。
函数:LCD_disp_cher(uchar x,uchar y,uchar *p),LCD可以显示2行字条,参数x为显示字符起始列数,取值范围1-16,y参数为显示字符的起始行数。*p参数为要显示字体串指向的第1个字符。
③头文件KEYSCAN.h,调用keyscan()函数,有按键按下时返回键值0-15,无按键按下时,返回键值0Xff.
3)程序流程图
①主程序流程图
②手动开关灯流程图
(二)定时开关灯
实验目的:
1、掌握时钟芯片DS1302的原理与应用。
2、掌握定时开关灯程序的设计。
软硬硬件设计
1、DS1302硬件电路
DS1302是由美国DALLAS公司推出的具有涓细电流充电能力的低功耗实时时钟芯片。它可以对年、月、日、周、时、分、秒进行计时,且具有闰年补偿等多种功能。其外围电路如图所示:
2、单片机程序设计
1)单片机端口和电路的连接
P22—SDA,P23—SCK,P24—RST
2)提供的C程序头文件和文档
①DS1302PDF文档,介绍DS1302的原理与应用。
②ds1302.h头文件,ds1302.c程序。
3)程序流程图
程序实现的主要功能为,能实时显示时、分、秒,能设置开灯和关灯的时间,能控制所有灯在规定的时间开灯和关灯。能分别独立控制每只路灯的开灯和关灯时间。输入时间时具有纠错功能。
①设置时间流程图
实现功能有,能设置系统的时间,要求在输入时间时具有容错的功能。
②控制2盏同时开灯和关灯简化流程图
本流程图为简化的流程图,本程序实现的功能主要由设置开灯时间,设置关灯时间和根据实时间开关灯等模块构成。要求同学们能独立完成各个模块流程图设计和软件的编写。
(三)根据环境明暗开关灯模块
实验目的:
1、掌握环境明暗检测电路的设计
2、掌握环境明暗检测电路软件的设计
软硬件设计:
1、环境明暗检测电路的设计(本电路要完成硬件电路的安装与调试)
光敏电阻的阻值随光照强度的增大而减小,所以可用光敏电阻检测环境的明暗,从而实现根据环境明暗变化,自动开灯和关灯。所设计的环境明暗检测电路如下图所示,电路中电位器RV1对电源分压后给电压比较器同相端提供一个基准电压。电压比较器反相端的电压由光敏电阻决定,当光照强度增大时,光敏电阻阻值减小,反相端电压升高,当光照强度达到一定值时,反相端电压大于同相端电压,电压比较器输出低电平,经过反相器U4:A后输出高电平,来实现控制开灯和关灯。(注:在PROTEUS仿真时,如把电压比较器直接连接到单片机,单片机不能区分其电平,在其后增加了一个反相器则可以。)
2、单片机程序设计
电路连接:反相器输出hj—P12
根据设计要求,程序能通过端口的电平来判断环境的明暗,从而实现开关灯。当环境亮度低于某一亮度阈值时,路灯打开。反之,路灯关闭。其流程图如下:
(四)根据交通情况开关灯模块
实验目的:
1、掌握交通状况检测电路的设计
2、掌握交通状况检测电路软件设计
软硬件设计:
1、红外发送接受模块ST188的原理与应用。
采用ST188红外对射传感器感测是否有物体通过,当没有物体通过时ce截止,单片机采到的电压值为低电平;当有物体经过时be导通,电源电压加到E 端,单片机采到的电压值为高电平。ST188的内部结构图如下图,K端接510Ω电阻,E端接20K电阻,A和C端接+5V的电压。
ST188内部结构图
2、交通状况检测电路的设计(本电路要完成硬件电路的安装与调试)
当有车辆或人经过时,ST188红外对射传感器被挡光,如下图电路按收三级管截止,输出为低电平,反之输出为高电平。电路中R1=510Ω,R2=20KΩ。
在PROTEUS仿真电路中,因没有红外对射传感器,可以用如下电路模拟红外对射传感器的功能。
3、交通状况检测电路软件设计
如上电路和单片机的连接:s1-P13,s2-P14,s3-P15
根据设计要求,程序要求能实现当可移动物体M(在物体前端标出定位点,由定位点确定物体位置)由左至右到达S点时(见图2),灯1亮;当物体M到达B点时,灯1灭,灯2亮;若物体M由右至左移动时,则亮灯次序与上相反。
本模块程序设计要求同学们独立完成,编程的要点是,定义一个标记位flag,当车辆从S-B-S'时, flag=0;当车辆从S'-B-S时, flag=1。
(四)路灯检测模块
实验目的:
1、掌握报警电路的设计
2、掌握路灯检测电路软件的设计
软硬件设计:
1、报警电路的设计(本电路需完成硬件电路的安装调试)
报警电路如下图所示,当BUZ=0时,电路不报警,当BUZ有脉冲信号时,蜂鸣器就会发出间断的声音,LED就会闪烁。
2、路灯检测电路软件的设计
电路连接:BUZ—P20,jc1-P16,jc2-P17
根据设计要求,程序要求能实现路灯好坏的检测,能显示已损坏灯的编号,检测到有路灯损坏时,能进行报警。
编程要点:jc1和jc2作为单片机的输入信号,当路灯工作正常时,jc1和jc2输出为高电平,反之输出为低电平,单片机采集该电平信号判断即可。
模拟路灯控制系统的毕业论文
————————————————————————————————作者:————————————————————————————————日期:
中文摘要 本作品是具有自动化程度高、运行可靠、使用维护方便的照明控制系统,为城市路灯现代化提供了一些参考方案。系统采用STC单片机为核心的最小系统板,设计了模拟路灯控制系统。控制系统采用定时器设定时钟功能,设定、显示开关灯时间;用了基于555为核心的红外传感器检测物体的定位。路灯单元控制系统采用恒流源供电,具有输出功率调整功能,并能定时调整功率。阐述了基于单片机模拟路灯控制系统实现的设计思想、方法及过程。该模拟控制系统,能有效的节约能源,减少照灯具的损耗。 城市亮化随之被政府所重视,既而大量的资金投入进行建设和改造中去,使得我们的城市夜晚变得灯火辉煌,绚丽多彩,但同时,诸多问题也随之而来:能耗的逐年攀升,产生的某些问题亦逐渐显露出来,如城市路灯的维护量增大,带来人员不足的问题,使得路灯故障时不能得到及时的修复以致造成人民生活的不便;维护费用也随之增加,社会成本过高,电费支出过多,财政承担相对困难,给政府带来了相对大的压力;光污染现象严重……这些问题的产生无疑给当地的路灯管理部门的各方面工作带来很大的压力,因此他们迫切的想解决此问题,故针对这种情况我们设计并制作了这一节能智能型的模拟路灯控制系统,其主要价值在于能更好的节能与监测,在很多方面给人们带来了方便,给维护人员降低了难度。 在白天模式的时候,还能根据环境明暗的变化控制路灯的开启和关闭路灯,在夜晚模式的情况下,根据交通路面情况自动开关灯。当灯出现故障不亮时,能够检测并且通过声光系统报警,显示器上显示故障灯的编号。自制的单元控制器中的LED灯恒流驱动电源,在多数情况下,具有系统稳定,功耗低等特点。 以STC89C51RC为核心,利用时钟控制LED灯的开关时间段,通过红外感应模块将物体运动的信号通过555的TTL高低电平输入单片机,并通过三红外线输入的情况判断物体运行方向,再控制LED灯的开关情况。并完成四方面的功能:时间设定功能,环境明暗判断,独立控制功能,交通条件控制功能。显示部分用LCD 液晶显示,要求能显示实时时间以及对路灯设置的开关灯时。 关键词:STC89C51单片机,红外传感器,1602液晶显示器,DS1302 NE555
《控制系统仿真与CAD》 实验课程报告
一、实验教学目标与基本要求 上机实验是本课程重要的实践教学环节。实验的目的不仅仅是验证理论知识,更重要的是通过上机加强学生的实验手段与实践技能,掌握应用 MATLAB/Simulink 求解控制问题的方法,培养学生分析问题、解决问题、应用知识的能力和创新精神,全面提高学生的综合素质。 通过对MATLAB/Simulink进行求解,基本掌握常见控制问题的求解方法与命令调用,更深入地认识和了解MATLAB语言的强大的计算功能与其在控制领域的应用优势。 上机实验最终以书面报告的形式提交,作为期末成绩的考核内容。 二、题目及解答 第一部分:MATLAB 必备基础知识、控制系统模型与转换、线性控制系统的计算机辅助分析 1. >>f=inline('[-x(2)-x(3);x(1)+a*x(2);b+(x(1)-c)*x(3)]','t','x','flag','a','b','c');[t,x]=ode45( f,[0,100],[0;0;0],[],0.2,0.2,5.7);plot3(x(:,1),x(:,2),x(:,3)),grid,figure,plot(x(:,1),x(:,2)), grid
2. >>y=@(x)x(1)^2-2*x(1)+x(2);ff=optimset;https://www.doczj.com/doc/2e4657849.html,rgeScale='off';ff.TolFun=1e-30;ff.Tol X=1e-15;ff.TolCon=1e-20;x0=[1;1;1];xm=[0;0;0];xM=[];A=[];B=[];Aeq=[];Beq=[];[ x,f,c,d]=fmincon(y,x0,A,B,Aeq,Beq,xm,xM,@wzhfc1,ff) Warning: Options LargeScale = 'off' and Algorithm = 'trust-region-reflective' conflict. Ignoring Algorithm and running active-set algorithm. To run trust-region-reflective, set LargeScale = 'on'. To run active-set without this warning, use Algorithm = 'active-set'. > In fmincon at 456 Local minimum possible. Constraints satisfied. fmincon stopped because the size of the current search direction is less than twice the selected value of the step size tolerance and constraints are satisfied to within the selected value of the constraint tolerance.
毕业论文声明 本人郑重声明: 1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。 2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。 3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。 4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。 学位论文作者(签名): 年月
关于毕业论文使用授权的声明 本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容: 按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。 论文作者签名:日期: 指导教师签名:日期: 摘要 随着城市建设和社会经济的迅速发展,城市道路照明作为城市文明与现代化程度的重要标志,已受到越来越多的关注,规模也在不断扩大。路灯是一个城市的照明系统不可分割更无可替代的一部分,现有的路灯管理的方式方法已远远不能满足城市路灯发展与管理的需要,必须依靠现代化的高科技管理手段。由于单片机具有集成度高,处理能力强,可靠性高,系统结构简单,价格低廉的优点,因此在路灯照明工程中被广泛应用。本系统采用MSC-51系列单片机AT89C51和相关的光电检测设备来设计智能光控路灯控制器,利用51系列单片机可编程控制八位逻辑I/O端口实现路灯的智能化,达到节能、自动控制的目的,单片机采集光敏电阻或光电开关的信号控制路灯的亮灭,具有自动检测故障报警等功能,同时根据实际情况,通过计时系统来对时间进行有效的控制,在本设计中,输入是开关按钮,进行时间控制,显示是六个数码管和LED二极管,时
实验一 Matlab使用方法和程序设计 一、实验目的 1、掌握Matlab软件使用的基本方法; 2、熟悉Matlab的数据表示、基本运算和程序控制语句 3、熟悉Matlab绘图命令及基本绘图控制 4、熟悉Matlab程序设计的基本方法 二、实验内容 1、帮助命令 使用help命令,查找sqrt(开方)函数的使用方法; 2、矩阵运算 (1)矩阵的乘法 已知A=[1 2;3 4]; B=[5 5;7 8]; 求A^2*B (2)矩阵除法 已知A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; A\B,A/B (3)矩阵的转置及共轭转置 已知A=[5+i,2-i,1;6*i,4,9-i]; 求A.', A' (4)使用冒号选出指定元素 已知:A=[1 2 3;4 5 6;7 8 9]; 求A中第3列前2个元素;A中所有列第2,3行的元素; (5)方括号[] 用magic函数生成一个4阶魔术矩阵,删除该矩阵的第四列 3、多项式 (1)求多项式p(x) = x3 - 2x - 4的根 (2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4] , 求矩阵A的特征多项式; 求特征多项式中未知数为20时的值; 4、基本绘图命令 (1)绘制余弦曲线y=cos(t),t∈[0,2π] (2)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5),t∈[0,2π] 5、基本绘图控制 绘制[0,4π]区间上的x1=10sint曲线,并要求: (1)线形为点划线、颜色为红色、数据点标记为加号; (2)坐标轴控制:显示范围、刻度线、比例、网络线 (3)标注控制:坐标轴名称、标题、相应文本; 6、基本程序设计 (1)编写命令文件:计算1+2+?+n<2000时的最大n值; (2)编写函数文件:分别用for和while循环结构编写程序,求2的0到n次幂的和。 三、预习要求 利用所学知识,编写实验内容中2到6的相应程序,并写在预习报告上。
科技学院 综合实验报告 ( -- 第1 学期) 名称: 控制系统综合实验 题目: 水位控制系统综合实验 院系: 动力工程系 班级: 自动化09K1 学号: 09191 116 学生姓名: 秦术员 指导教师: 平玉环 设计周数: 1周 成绩: 日期: 1月7日
《控制系统》综合实验 任务书 一、目的与要求 本综合实验是自动化专业的实践环节。经过本实践环节, 使学生对实际控制系统的结构、系统中各环节的关系、数字控制器的应用和控制系统的整定等建立起完整的概念。培养学生利用所学理论知识分析、解决实际问题的能力。 1. 了解单容水箱水位控制系统的实际结构及各环节之间的关 系。 2. 学会数字控制器组态方法。 3. 掌握控制系统整定方法, 熟悉工程整定的全部内容。 二、主要内容 1.熟悉紧凑型过程控制系统, 并将系统调整为水位控制状态。 2.对数字控制器组态。 3.求取对象动态特性。 4.计算调节器参数。 5.调节器参数整定。 6.做扰动实验, 验证整定结果。 7.写出实验报告。 三、进度计划
四、实验成果要求 完成实验报告, 实验报告包括: 1.实验目的 2.实验设备 3.实验内容, 必须写出参数整定过程, 并分析控制器各参数的作用, 总结出一般工程整定的步骤。 4.实验总结, 此次实验的收获。 以上内容以打印报告形式提交。 五、考核方式 根据实验时的表现、及实验报告确定成绩。 成绩评分为经过以及不经过。 学生姓名: 秦术员 指导教师: 平玉环 1月7日
一、综合实验的目的与要求 本综合实验是自动化专业的实践环节。经过本实践环节, 使学生对实际控制系统的结构、系统中各环节的关系、数字控制器的应用和控制系统的整定等建立起完整的概念。培养学生利用所学理论知识分析、解决实际问题的能力。 1. 了解单容水箱水位控制系统的实际结构及各环节之间的关 系。 2. 学会数字控制器组态方法。 3. 掌握控制系统整定方法, 熟悉工程整定的全部内容。 二、实验正文 1. 实验设备 紧凑型过程控制系统; 上位机 2. 液位控制系统 2.1 液位控制系统流程图, 如图1
一、本课题的内容及研究意义 1、论文研究的目的和意义 如今,照明电路的数量越来越多,使得城市街道、小区内的路灯的用电量占城市用电量的比重越来越大,在用电高峰期时,电网超负荷运行,电网电压都低于额定值,在用电低谷期供电电压又高于额定值,当电压高时不但影响照明设备的使用寿命,而且耗电量也大幅增加,当低谷时,照明设备有不能正常工作。 所以,对城市的路灯的设计已经成为了当务之急,特别是午夜之后车流量急剧减少时,应该适当的关闭路灯,节约用电。但是我国的既节能又能延长路灯寿命的技术相比国外却是落后了,因此智能节能路灯控制系统的设计对于城市的发展至关重要。本论文旨在设计一套对外界光线和电压信号的采集来控制路灯的自动启停以及智能调压的控 制系统,它能对路灯进行稳压、调压、自启动并延长路灯寿命的作用。 2、论文研究内容 本设计可以通过对外界光线和电压信号的采集来控制路灯的自动启停以及智能调压从而减少城市路灯照明耗电量,又对输入电压进行稳压调节来提高用电效率。要求独立选择芯片、设计电路、编制程序、调试、完成整个系统功能。 主要内容如下: (1) 根据控制技术的特点,进行路灯系统设计的整体研究与设计。 (2) 针对光线和电压信号的采集,采用数据采集技术。 (3) 通过按键可对相关的参数值进行设置,从而实现对不同时间进行不同的开灯模式。 (4) 当电压符合额定电压时,系统自动进行稳压。 (5) 在午夜之后降低电压以调节路灯亮度,实现调压。 二、本课题的研究现状和发展趋势 目前,路灯系统一般采用钠灯、水银灯、金卤灯等灯具。这类灯具有发光效率高、光色好、安装简易等优点,被广泛使用,但同时也存在着诸如:功率因子低、对电压要求严格、耗电量大等缺点。 我国目前大部分城市都采用全夜灯的方式进行照明,普遍存在的问题有两点:一方面因为后半夜行人稀少,采用全夜灯的方式浪费太大,因此,有的地方采取前半夜全亮,后半夜全灭的照明方式;有的地方在后半夜采用亮一隔一或亮一隔二的节能措施,此种方式虽然节约了电费支出,却带来了社会治安和交通安全问题,不利于城市安全问题。 另一方面,在后半夜因行人稀少,而应该降低路灯的亮度,以避免光源污染,影响居民的晚间的休息。但由于后半夜是用电低谷期,电力系统电压升高,路灯反而比白天更亮了。这不仅造成了能源浪费,还大大影响了设备和灯具的使用寿命。目前,路灯照明广泛采用高压钠灯,其设计寿命在12000小时以上,在正常情况下至少可用3年,但是由于超压使用,现在路灯的使用寿命仅仅只有1年左右,有的甚至只有几个月,造成
毕业论文 基于电力载波技术的智能化路灯控制系统设计 姓名 学院电气工程与自动化学院 专业自动化 指导教师 职称教授 2013年5月1日
天津工业大学毕业论文任务书 题目基于电力载波技术的智能化路灯控制系统设计 学生姓名额外特温 特 学院名称 电气工程与自动化学 院 专业班级 过多个地 方 课题类型实际课题 课题意义 基于电力载波技术的智能化路灯控制系统能够弥补当前路灯控制器的不足,将电力载波技术应用于路灯控制过程中,实现主控站和从控制站之间的信息交换,从而实现路灯的智能化,并且成本低,易于推广应用。它能够实现远程控制,并和现有的电力线兼容,检修方便,可以提高城市路灯的利用率,节能。 任务与进度要求3.12-3.30:对此设计进行初步的了解和资料查询,对本设计方案具有初步的轮廓 4.2-4.30:完成控制设计,及硬件电路设计, 5.4-5.30 :完成毕业论文任务书初稿,并对设计的硬件进行调试; 5.31- 6.7:完善任务书,准备毕业答辩,按时完成 主要参考 文献[1] M.- H. Shwehdi, “A Power Line Data Communication Interface using Spread Spectrum Echnology in Home Automation [J],” IEEE Trans. Power Delivery, vol. 11, no. 3, July 1996, pp. 1232-1237. [2] 张辉.现代通信原理与技术[M].西安:西安电子科技大学出版社,2002. [3] 齐国清.信号检测与估计[M].北京:电子工业出版社,2010. [4] 朱小龙.数字通信技术[M].北京:化学工业出版社,2004. 起止日期2013年3月12日—2013年6月7日备注 院长教研室主任指导教师
基于51单片机的模拟路灯控制系统1. 系统设计 1.1 设计要求 一、任务(来自原题) 设计并制作一套模拟路灯控制系统。控制系统结构如图1所示,路灯布置如图2所示。 图1 路灯控制系统示意图 .. .专业. .
图2 路灯布置示意图(单位:cm) 二、设计要求+ 1.基本要求 (1)支路控制器有时钟功能,能设定、显示开关灯时间,并控制整条支路按时开灯和关灯。 (2)支路控制器应能根据环境明暗变化,自动开灯和关灯。 (3)支路控制器应能根据交通情况自动调节亮灯状态:当可移动物体M(在物体前端标出定位点,由定位点确定物体位置)由左至右到达S点时(见图2),灯1亮;当物体M到达B点时,灯1灭,灯2亮;若物体M由右至左移动时,则亮灯次序与上相反。 (4)支路控制器能分别独立控制每只路灯的开灯和关灯时间。 .. .专业. .
(5)当路灯出现故障时(灯不亮),支路控制器应发出声光报警信号,并显示有故障路灯的地址编号。 2.发挥部分 (1)自制单元控制器中的LED灯恒流驱动电源。 (2)单元控制器具有调光功能,路灯驱动电源输出功率能在规定时间按设定要求自动减小,该功率应能在20%~100%围设定并调节,调节误差≤2%。 (3)性价比高,工作稳定,符合电磁兼容(EMC)方面的要求,无对外干扰或干扰小。 1.2 总体设计方案 1.2.1 功能分解及设计思路 本模拟路灯控制系统的设计方案要实现的主要功能主要分解为以下五个方面: 一是时钟功能及定时开关灯。 二是根据环境明暗变化,自动开灯和关灯。 三是根据交通情况自动调节亮灯状态:当汽车靠近路灯时,路灯能自动点亮;当汽车远离时,路灯自动熄灭。 四声光报警功能,当路灯出现故障时而不亮时,控制器发出信号,并显示有故障路灯的地址编号。 五是根据绿色节能照明要求,采用恒流源驱动LED路灯发亮且能调光,路灯驱动电源输出功率能在20%~100%围设定并调节,调节误差≤2%。 以上功能的实现,都是以单片机为核心,在单片机系统实现的输入输出和显示功能的基础上,由单片机的置逻辑和运算功能,加上一定的外围电路.. .专业. .
基于51单片机的模拟路灯控制系统 1. 系统设计 1.1 设计要求 一、任务(来自原题) 设计并制作一套模拟路灯控制系统。控制系统结构如图1所示,路灯布置如图2所示。 图1 路灯控制系统示意图
图2 路灯布置示意图(单位:cm) 二、设计要求+ 1.基本要求 (1)支路控制器有时钟功能,能设定、显示开关灯时间,并控制整条支路按时开灯和关灯。 (2)支路控制器应能根据环境明暗变化,自动开灯和关灯。 (3)支路控制器应能根据交通情况自动调节亮灯状态:当可移动物体M(在物体前端标出定位点,由定位点确定物体位置)由左至右到达S点时(见图2),灯1亮;当物体M到达B点时,灯1灭,灯2亮;若物体M由右至左移动时,则亮灯次序与上相反。 (4)支路控制器能分别独立控制每只路灯的开灯和关灯时间。 (5)当路灯出现故障时(灯不亮),支路控制器应发出声光报警信号,并显示有故障路灯的地址编号。 2.发挥部分
(1)自制单元控制器中的LED灯恒流驱动电源。 (2)单元控制器具有调光功能,路灯驱动电源输出功率能在规定时间按设定要求自动减小,该功率应能在20%~100%范围内设定并调节,调节误差≤2%。 (3)性价比高,工作稳定,符合电磁兼容(EMC)方面的要求,无对外干扰或干扰小。 1.2 总体设计方案 1.2.1 功能分解及设计思路 本模拟路灯控制系统的设计方案要实现的主要功能主要分解为以下五个方面: 一是时钟功能及定时开关灯。 二是根据环境明暗变化,自动开灯和关灯。 三是根据交通情况自动调节亮灯状态:当汽车靠近路灯时,路灯能自动点亮;当汽车远离时,路灯自动熄灭。 四声光报警功能,当路灯出现故障时而不亮时,控制器发出信号,并显示有故障路灯的地址编号。 五是根据绿色节能照明要求,采用恒流源驱动LED路灯发亮且能调光,路灯驱动电源输出功率能在20%~100%范围内设定并调节,调节误差≤2%。 以上功能的实现,都是以单片机为核心,在单片机系统实现的输入输出和显示功能的基础上,由单片机的内置逻辑和运算功能,加上一定的外围电路得以实现。针对以上的五个功能,采用模块化的设计思想,以下分别叙述之。 1.2.2 方案论证与比较 1.2.2.1 时钟功能及定时开关机。 方案一:采用专用时钟芯片。
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
河北机电职业技术学院毕业论文 题目智能节能路灯控制系统设计 系别电气工程系 专业电气自动化技术 姓名孟学文 指导教师刘成伟
目录 摘要 (3) 1 绪论 (4) 1.1 概述 (4) 2 方案论证与选择 (5) 2.1 智能路灯节能方案概述 (5) 2.2 智能路灯节能控制系统结构设计 (5) 2.3 可变电抗器 (6) 2.4 智能控制器 (8) 2.5 每只LED灯控制逻辑关系图 (8) 2.6 系统硬件总体划分 (8) 2.7 智能控制器总体设计 (8) 3 智能路灯节能控制系统各电路部分设计 (9) 3.1 环境光控制电路的设计 (9) 3.2 时钟电路 (12) 3.3 横流驱动电路 (14) 3.4 故障检测电路 (16) 3.5 电源电路的设计 (16) 3.6 报警电路的设计 (17) 4 控制部分设计 (18) 4.1 单片机系统介绍 (18) 4.2 整个系统的控制流程 (19) 4.3 显示装置流程图 (20) 总结与展望 (21) 总结 (21) 展望 (21) 参考文献 (22) 附图 (23)
智能路灯节能控制系统设计 杨亮亮 (安徽工业大学工学院农业电气化与自动化07级) 摘要:随着我国经济的快速发展,电力消费也随之快速地增长。电力资源已成为紧缺资源。如何节能降耗已成为近年来研究的热点课题。 本文研究的智能路灯节能控制系统是针对我国在城市照明上所存在的巨大的能源消耗 而开发的基于单片机的新型节能控制系统,集稳压控制、软起动功能、自动起停、智能调 压控制于一体。智能路灯节能控制系统将晶闸管功率变换单元和智能控制系统相结合,利 用可变电抗器隔离高压和低压,将可变电抗器的一次绕组(高压)与路灯相串联,将二次绕 组与晶闸管和具有模糊控制算法的控制系统相联,通过改变其低压绕组上的电压来控制高 压绕组上电压的变化,从而达到改变路灯端电压的效果,以实现路灯的软起动和调压节 能。 本文对基于单片机的智能路灯节能控制系统进行了深入分析和研究。讨论了智能路灯节能控制系统的构思、设计方案,介绍了该装置的系统设计、工作原理,详细分析了以89C51为主控单元的硬件电路设计,以及电气连接。 关键词:单片机、智能路灯 Abstract: with the rapid development of our economy, electricity consumption is subsequently fast growth. Electric power resource has become shortage resources. How to energy consumption has become the hot topic research in recent years. This paper studies of intelligent street lamp energy saving control system is aiming at existing in urban lighting on the huge energy consumption and development based on SCM system, set the new energy-saving control voltage control, soft starter to function, the automatic starting and stopping, intelligent pressure regulating control in one body. Intelligent street lamp energy saving control systems will be thyristor power changing unit and intelligent control system by combining, high voltage and low voltage variable reactor isolation, a winding variable reactor (HVT) and street lamp in series, will be secondary windings and thyristor and fuzzy control algorithm with associated the control system by changing its low voltage to control
LED Lighting Control using the MC9S08AW60 Designer Reference Manual To provide the most up-to-date information, the revision of our documents on the World Wide Web is the most current. Your printed copy may be an earlier revision. To verify you have the latest information available, The following revision history table summarizes changes contained in this document. For your convenience, the page number designators have been linked to the appropriate location. Revision History Chapter 1 Introduction 1.1 Introduction This manual describes a reference design of a multi-color LED lighting control solution by using the MC9S08AW60 Microcontroller. Using a microcontroller (MCU) to control the red/green/blue (RGB) color LEDs increases system flexibility and functionality for the next generation of lighting applications, architectural/entertainment lighting or LCD backlighting, that require a smart and adaptive control methodology to ensure optimized color space rendering for various display contents, excellent color contrast for realistic display scene and a consistent color setting in manufacturing. In many cases, these new applications are controlled by a central control unit that requires a connectivity interface that can be implemented at a low cost using MCU-based lighting controller. A compact light-box with more than a million display colors is implemented to demonstrate the advantages of using MCU to control RG B color LEDs with different luminosity settings. The average current through each color LED is controlled by an individual PWM signal generated from MCU and the LED luminosity is almost in
昆明理工大学电力工程学院学生实验报告 实验课程名称:控制系统仿真实验 开课实验室:年月日
实验一 电路的建模与仿真 一、实验目的 1、了解KCL 、KVL 原理; 2、掌握建立矩阵并编写M 文件; 3、调试M 文件,验证KCL 、KVL ; 4、掌握用simulink 模块搭建电路并且进行仿真。 二、实验内容 电路如图1所示,该电路是一个分压电路,已知13R =Ω,27R =Ω,20S V V =。试求恒压源的电流I 和电压1V 、2V 。 I V S V 1 V 2 图1 三、列写电路方程 (1)用欧姆定律求出电流和电压 (2)通过KCL 和KVL 求解电流和电压
四、编写M文件进行电路求解(1)M文件源程序 (2)M文件求解结果 五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值
六、结果比较与分析
实验二数值算法编程实现 一、实验目的 掌握各种计算方法的基本原理,在计算机上利用MATLAB完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。 二、实验说明 1.给出拉格朗日插值法计算数据表; 2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据; 3.根据MATLAB软件特点和算法流程框图,利用MATLAB软件进行上机编程; 4.调试和完善MATLAB程序; 5.由编写的程序根据实验要求得到实验计算的结果。 三、实验原始数据 上机编写拉格朗日插值算法的程序,并以下面给出的函数表为数据基础,在整个插值区间上采用拉格朗日插值法计算(0.6) f,写出程序源代码,输出计算结果: 四、拉格朗日插值算法公式及流程框图
摘要 本文介绍了一个模拟路灯控制系统的应用方案,用以实现模拟路灯的智能控制。本方案以宏晶公司的MCU芯片STC12C5410AD为核心,加以简单的外围电路,实现了模拟路灯控制系统所要求的全部技术内容。STC单片机在最近几年应用越来越广泛,因其抗干扰能力强、稳定性好,性价比高,因此是低成本路灯控制解决方案的首选。该控制系统除了选用廉价的单片机芯片,还采用了廉价的红外对射传感器,大大降低了系统成本。整个系统的电路简单,结构紧凑,电源驱动仅采用变压器与三端稳压器相结合,附加少许滤波电容便实现了稳定的电源输出。经过多次测试,证实该系统能长时间稳定工作,完全满足设计要求指标。 关键词:模拟控制;LED照明;单片机
ABSTRACT This paper introduces a simulation control system application scheme street, to simulate the street lamp of intelligent control. This plan to macro crystal company MCU, STC12C5410AD as the core, to chip the periphery of the simple circuit, realize the simulation street lamp control system all of the requested technology content. STC SCM in recent years more and more wide application, because of its strong anti-interference ability, good stability, high performance/price ratio, and so is the low cost street lamp control solutions of choice. The control system in addition to choose cheap single-chip microcomputer chip, also adopted the cheap infrared mutual illuminate sensor, and greatly reduce the cost of system. The whole system of the circuit is simple, compact structure, power drive only used three transformer and the regulators, and the combination of a few additional filter capacitance will realize the stable power output. After many test, and confirm that the system can work stably for a long time, fully meet the design requirements index. Keywords: Simulate controlling; LED lighting; Single-chip microcomputer
控制系统数字仿真实验报告 班级:机械1304 姓名:俞文龙 学号: 0801130801
实验一数字仿真方法验证1 一、实验目的 1.掌握基于数值积分法的系统仿真、了解各仿真参数的影响; 2.掌握基于离散相似法的系统仿真、了解各仿真参数的影响; 3.熟悉MATLAB语言及应用环境。 二、实验环境 网络计算机系统(新校区机电大楼D520),MATLAB语言环境 三实验内容 (一)试将示例1的问题改为调用ode45函数求解,并比较结果。 实验程序如下; function dy = vdp(t,y) dy=[y-2*t/y]; end [t,y]=ode45('vdp',[0 1],1); plot(t,y); xlabel('t'); ylabel('y');
(二)试用四阶RK 法编程求解下列微分方程初值问题。仿真时间2s ,取步长h=0.1。 ?????=-=1 )0(2y t y dt dy 实验程序如下: clear t0=0; y0=1; h=0.1; n=2/h; y(1)=1; t(1)=0; for i=0:n-1 k1=y0-t0^2; k2=(y0+h*k1/2)-(t0+h/2)^2; k3=(y0+h*k2/2)-(t0+h/2)^2;
k4=(y0+h*k3)-(t0+h)^2; y1=y0+h*(k1+2*k2+2*k3+k4)/6; t1=t0+h; y0=y1; t0=t1; y(i+2)=y1; t(i+2)=t1; end y1 t1 figure(1) plot(t,y,'r'); xlabel('t'); ylabel('y'); (三)试求示例3分别在周期为5s的方波信号和脉冲信号下的响应,仿真时间20s,采样周期Ts=0.1。
基于单片机的智能路灯控制系统的设计 摘要:随着社会进步,需求和单片机应用领域的不断扩展,各类智能产品、控制系统都是以单片机技术为核心来进行开发设计。本系统采用MSC-51系列单片机AT89C51和相关的光电检测设备设计路灯控制器, 关键词:路灯;单片机技术;控制 如今,路灯已经是城市道路景观的一个重要部分,已经成为城市照明系统中不可缺少和不可分割的一部分,成为了市民出行和城市美化、亮化的一个基本要求。随着社会文明的不断发展,城市照明已不仅局限于街道的照明,而且发展成了了城市景观等装饰性照明的综合市政工程。社会对亮灯率、开关灯的准确率、故障检测的实时性和维修的及时性要求不断提高。 随着社会经济的不断发展,能源短缺已经日益制约着经济发展的严重障碍,其中电力短缺已成为制约国民经济的突出矛盾。我国目前的市场上有多种路灯节能控制产品,能达到一定的节能效果,但就功能和效果上还不能尽如人意,主要有以下几种情况:第一种,采用自耦变压器及磁饱和电抗器的降压技术。其不足是由于反应速度较慢,用电高峰时电压降到非稳定区容易造成灯光闪灭,不能自动调节,同时如果电压突然升高,则会对灯具造成损坏,相对来说稳压效果较差;第二种是采用电子器件构成的可控硅式设备。该设备主要采取简单的相控技术,不足之处是元器件较容易发热损坏。而为了更好的达到控制的目的,现在国内外都开始采用智能控制方式,如光控、声控、时控等,国外甚至开始采用太阳能供能光控方式来控制路灯,基本可以达到完全自给
自足的效果。而本文中研究的就是光控路灯的控制器设计。 1.设计题目 智能路灯亮灭控制系统设计 2.设计内容 设计一套路灯亮灭控制系统,以MCS-51系列单片机为核心完成测控任务,当日照亮度超过阈值,控制灯灭;反之,则控制灯亮。并且要求阈值可调。 3.方案总体设计与论证 本次课程设计课题是《智能路灯亮灭控制系统设计》。此课题要求以路灯控制器为对象,完成硬件系统和软件程序的设计,实现以光线强弱方式来控制路灯的亮灭功能,属于软硬件相结合的题目。其中硬件电路部分主要包括以下几个部分:单片机最小系统、路灯控制电路部分、光电检测电路部分;软件部分主要包括二个电子软件Altium designer、 Keil-C51软件和路灯控制、光电检测两个程序模块。工作原理如下图所示: 工作原理图 硬件电路设计由6个部分组成:信号采集放大电路,A/D
摘要 本设计是一种采用新一代超强抗干扰/强抗静电/高速/低功耗单片STM32为数据处理和控制的路灯照明智能系统。该单片机实现了对路灯的亮灭控制、报警、还有定时功能。采用节能环保的LED灯作为光源,采用科学有效的检测与控制技术,实现了光电控制、时间控制、交通情况检测、故障自动检测与报警等功能,节省了人力和电力资源,降低了系统运行成本,性价比较高。通过光敏电阻模块检测LED故障,ULN2803芯片控制LED灯状态,利用光敏电阻原理和红外对管特性实现自动调节路灯开关状态。 关键字:STM32-cortex-m3; Abstract This design is a new generation of powerful anti-interference / strong antistatic / high / low power single chip STM32 as the data processing and control of street lamp intelligent lighting system. The single chip microcomputer to achieve the bright lights out of control, alarm, and the timing function. The energy saving and environmental protection of the LED lamp as the light source, the use of scientific and effective detection and control technology, realize the photoelectric control, time control, traffic condition detection, automatic fault detection and alarm functions, saving manpower and electric power resources, reducing the operation cost of the system, price is comparatively high. Photosensitive resistance through fault detection module LED, ULN2803 chip control LED lamp status, use of photosensitive resistance theory and infrared tube characteristics to realize automatic adjustment of road lamp switch state. Keywords: STM32-cortex-m3; 目录