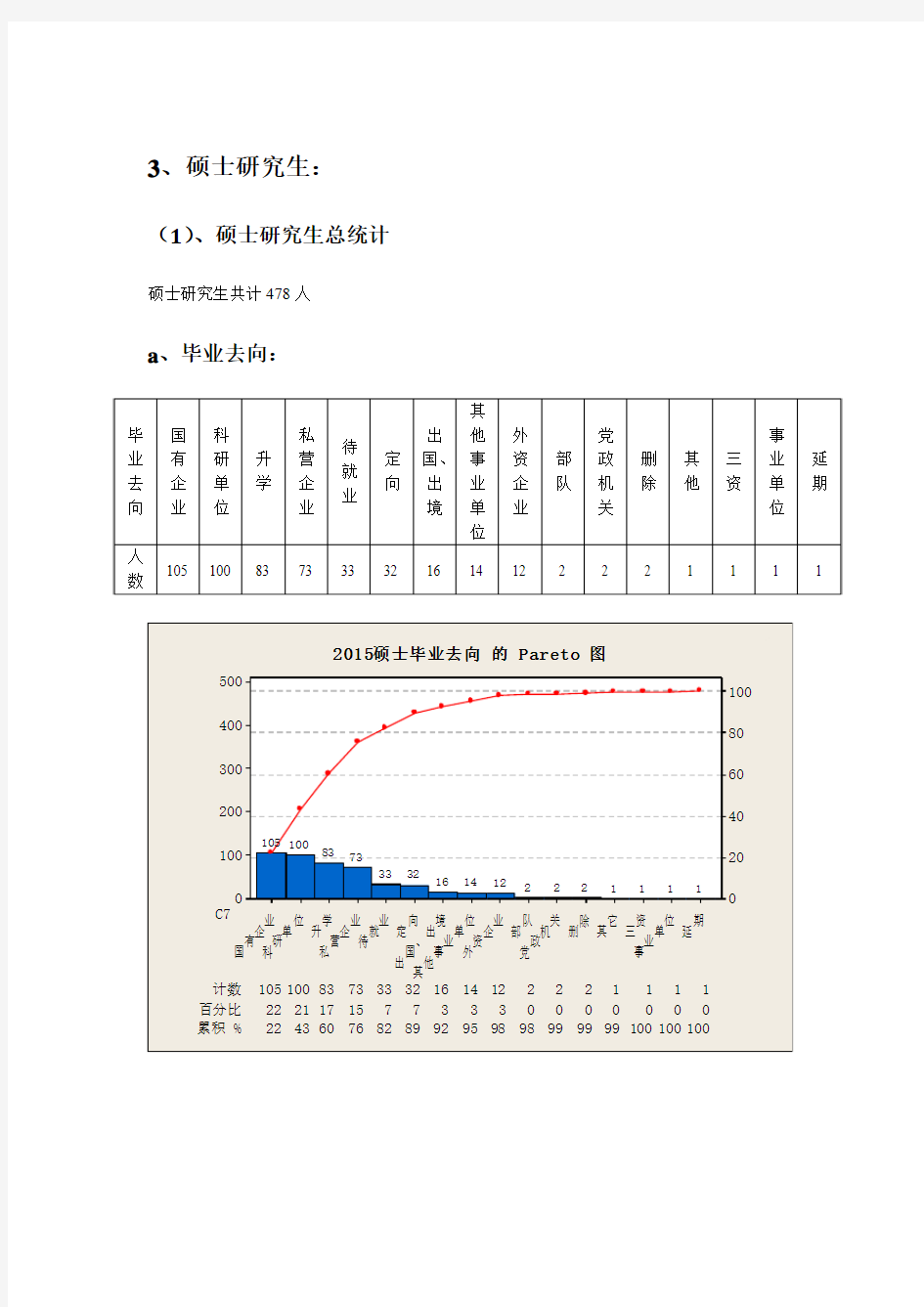

3、硕士研究生:(1)、硕士研究生总统计硕士研究生共计478人
a、毕业去向:
b、升学统计
c、硕士研究生就业北上广深
就业去往北上广深的人数共计:72人。(2)、硕士研究生各专业毕业去向:a、材料工程
毕业去向
升学统计
3人升学,升学单位哈尔滨工业大学就业统计
硕士就业北上广深
就业北上广深的共计1人b、材料学
毕业去向
升学统计
就业统计
硕士就业北上广深北上广深共计0人。
c、光学工程
毕业去向
升学统计
3人升学,升学单位哈尔滨工业大学
就业统计
硕士就业北上广深
北上广深共计11人。
d、航空宇航科学与技术毕业去向
升学统计
就业统计
硕士就业北上广深北上广深共计5人
e、航天工程
毕业去向
升学统计
就业统计
硕士就业北上广深北上广深共计7人。
f、集成电路工程毕业去向
升学统计
1人升学,升学单位哈尔滨工业大学
就业统计
硕士就业北上广深
北上广深共计5人。
g、科学技术史
共计一人
国有企业,单位名称:中国建设银行股份有限公司黑龙江省分行,单位所在地:黑龙江省牡丹江市。
h、控制工程
毕业去向
升学统计
就业统计
硕士就业北上广深
北上广深共计16人。i、控制科学与工程毕业去向
升学统计
一、运动学正解程序及结果 1、程序: syms x1x2x3x4x5x6d1d2d4a2a3x d a Rx=[1 0 0 0;0 cos(x) -sin(x) 0;0 sin(x) cos(x) 0;0 0 0 1]; Rz=[cos(x) -sin(x) 0 0;sin(x) cos(x) 0 0;0 0 1 0;0 0 0 1]; Tx=[1 0 0 a;0 1 0 0;0 0 1 0;0 0 0 1]; Tz=[1 0 0 0;0 1 0 0;0 0 1 d;0 0 0 1]; t=pi/180; y1=90;y2=-90;y3=-90; T01=subs(Rz,x,x1)*subs(Tz,d,d1)*subs(Rx,x,y1*t); T12=subs(Rz,x,x2)*subs(Tz,d,d2)*subs(Tx,a,a2); T23=subs(Rz,x,x3)*subs(Tx,a,a3)*subs(Rx,x,y3*t); T34=subs(Rz,x,x4)*subs(Tz,d,d4)*subs(Rx,x,y4*t); T45=subs(Rz,x,x5)*subs(Rx,x,90); T=T01*T12*T23*T34*T45; t=subs(T,{y1,y3,y4,y5},[pi/2,-pi/2,-pi/2,pi/2]); t= simplify(t); nx=t(1,1);ny=t(2,1);nz=t(3,1); ox=t(1,2);oy=t(2,2);oz=t(3,2); ax=t(1,3);ay=t(2,3);az=t(3,3); px=t(1,4);py=t(2,4);pz=t(3,4); 结果: Nx=sin(x2 + x3)*cos(x1)*sin(x5) - cos(x5)*sin(x1)*sin(x4)+cos(x1)*cos(x2)*cos(x3)*cos(x4)*cos(x5) - cos(x1)*cos(x4)*cos(x5)*sin(x2)*sin(x3) Ny=cos(x1)*cos(x5)*sin(x4) + sin(x2 + x3)*sin(x1)*sin(x5)+cos(x2)*cos(x3)*cos(x4)*cos(x5)*sin(x1) - cos(x4)*cos(x5)*sin(x1)*sin(x2)*sin(x3) Nz=sin(x2 + x3)*cos(x4)*cos(x5) - cos(x2 + x3)*sin(x5) Ox=sin(x4)*(cos(x1)*sin(x2)*sin(x3) - cos(x1)*cos(x2)*cos(x3)) - cos(x4)*sin(x1) Oy=cos(x1)*cos(x4) - sin(x4)*(cos(x2)*cos(x3)*sin(x1) - sin(x1)*sin(x2)*sin(x3)) Oz=-sin(x2 + x3)*sin(x4) Ax=cos(x1)*cos(x2)*cos(x3)*cos(x4)*sin(x5) - sin(x2 + x3)*cos(x1)*cos(x5) - sin(x1)*sin(x4)*sin(x5) - cos(x1)*cos(x4)*sin(x2)*sin(x3)*sin(x5) Ay=cos(x1)*sin(x4)*sin(x5) - sin(x2 + x3)*cos(x5)*sin(x1) + cos(x2)*cos(x3)*cos(x4)*sin(x1)*sin(x5) - cos(x4)*sin(x1)*sin(x2)*sin(x3)*sin(x5)
第3章 多元正态总体的假设检验与方差分析 从本章开始,我们开始转入多元统计方法和统计模型的学习。统计学分析处理的对象是带有随机性的数据。按照随机排列、重复、局部控制、正交等原则设计一个试验,通过试验结果形成样本信息(通常以数据的形式),再根据样本进行统计推断,是自然科学和工程技术领域常用的一种研究方法。由于试验指标常为多个数量指标,故常设试验结果所形成的总体为多元正态总体,这是本章理论方法研究的出发点。 所谓统计推断就是根据从总体中观测到的部分数据对总体中我们感兴趣的未知部分作出推测,这种推测必然伴有某种程度的不确定性,需要用概率来表明其可靠程度。统计推断的任务是“观察现象,提取信息,建立模型,作出推断”。 统计推断有参数估计和假设检验两大类问题,其统计推断目的不同。参数估计问题回答诸如“未知参数θ的值有多大?”之类的问题,而假设检验回答诸如“未知参数θ的值是0θ吗?”之类的问题。本章主要讨论多元正态总体的假设检验方法及其实际应用,我们将对一元正态总体情形作一简单回顾,然后将介绍单个总体均值的推断, 两个总体均值的比较推断,多个总体均值的比较检验和协方差阵的推断等。 3.1一元正态总体情形的回顾 一、 假设检验 在假设检验问题中通常有两个统计假设(简称假设),一个作为原假设(或称零假设),另一个作为备择假设(或称对立假设),分别记为0H 和1H 。 1、显著性检验 为便于表述,假定考虑假设检验问题:设1X ,2X ,…,n X 来自总体),(2 σμN 的样本,我们要检验假设 100:,:μμμμ≠=H H (3.1) 原假设0H 与备择假设1H 应相互排斥,两者有且只有一个正确。备择假设的意思是,一旦否定原假设0H ,我们就选择已准备的假设1H 。 当2 σ已知时,用统计量n X z σ μ -=
龙源期刊网 https://www.doczj.com/doc/2f6888353.html, 哈工大机器人集团产业运营生态圈及机器人产业发展动向 作者: 来源:《机器人产业》2018年第04期 如今,在我们的生活中随处可见机器人的身影,伴随科学技术的快速发展,机器人正变得越来越智能,并且在工业、教育、医疗、安防等诸多领域发挥了重要作用。为进一步推动机器人产业发展,哈工大机器人集团在总结过去实践经验的基础上,构建了一套完整的产业生态圈,并对机器人产业的未来发展方向提出了独到见解。 哈工大机器人集团的产业生态圈 哈工大机器人集团成立于2014年12月,经过三年多的探索,初步形成了以产业集团为组织形式,以产业投资和产业孵化服务为工具,以聚合产业发展资源为特色,以高端技术和高端人才为核心竞争力,以科技成果转化为主要任务和重要利润来源,以产业链整体运营和整体进步为目标的工程化创业模式。哈工大机器人集团的缩写是HRG。因此,我们也把哈工大机器人集团的这种创新、创业和产业模式称为HRG模式。 当前,我国的经济已经发展到了一个关键的节点,增长模式由投资引领升级到创新创业驱动。通过探索和实践,目前HRG已经基本形成自己的产业生态圈,打通了创新、创业、产业联动发展的业务和逻辑链条,能够很好地把项目从哪里来,项目如何孵化,以及项目到哪里去的问题统筹起来,形成一个整体的解决方案,构建了完整的创新体系、创业体系和产业体系。 创新平台 创新平台的作用是有效地整合创新要素和资源。通过相关的创新要素聚集、交流和共享,提高技术向产品转化的效率,降低成本,缩短周期。我们联合了哈工大机器人技术与系统国家重点实验室、国家机器人创新中心、国家机器人检测与评定中心等机构以及HRG自己的产业研究院,在关键性的核心技术上谋求突破,力争抢占全球下一代机器人的技术高地、产业高地和人才高地。 创业平台 通过创业平台服务项目孵化,为孵化企业导入营销、人才、技术、供应链、品牌、基地建设、基金等支撑资源,同时为企业提供核心人才培育服务,从而保障创业者将更多的精力和资源投入到技术研发、产品生产、质量监管等核心环节,专注于企业竞争力的打造,助力企业价值快速体提升。
哈尔滨理工大学毕业设计(论文)任务书毕业设计(论文)是学生毕业前最后一个重要学习环节,是学习深化与升华的重要过程。它既是学生学习、研究与实践成果的全面总结,又是对学生素质与能力的一次全面检验,而且还是对学生的毕业资格及学位资格认证的重要依据。为了保证我校本科生毕业设计(论文)质量,特制定“哈尔滨理工大学本科生毕业设计(论文)撰写规范”。 一、毕业设计(论文)资料的组成A.毕业设计(论文)任务书;B.毕业设计(论文)成绩评定书;C.毕业论文或毕业设计说明书(包括:封面、中外文摘要或设计总说明(包括关键词)、目录、正文、谢辞、参考文献、附录);D.译文及原文复印件;E.图纸、软盘等。 二、毕业设计(论文)资料的填写及有关资料的装订毕业设计(论文)统一使用学校印制的毕业设计(论文)资料袋、毕业设计(论文)任务书、毕业设计(论文)成绩评定书、毕业设计(论文)封面、稿纸(在教务处网上下载用,学校统一纸面格式,使用A4打印纸)。毕业设计(论文)资料按要求认真填写,字体要工整,卷面要整洁,手写一律用黑或蓝黑墨水;任务书由指导教师填写并签字,经院长(系主任)签字后发出。毕业论文或设计说明书要按顺序装订:封面、中外文摘要或设计总说明(包括关键词)、目录、正文、谢辞、参考文献、附录装订在一起,然后与毕业设计(论文)任务书、毕业设计(论文)成绩评定书、译文及原文复印件(订在一起)、工程图纸(按国家标准折叠装订)、软盘等一起放入填写好的资料袋内交指导教师查收,经审阅评定后归档。 三、毕业设计说明书(论文)撰写的内容与要求一份完整的毕业设计(论文)应包括以下几个方面: 1.标题标题应该简短、明确、有概括性。标题字数要适当,
《机器人技术》大作业 (2015年秋季学期) 题目消防机器人发展与应用 姓名 学号 班级 专业机械设计制造及其自动化 报告提交日期2015.12.04 哈尔滨工业大学
内容及要求 1.以某种机器人(如搬运、焊接、喷漆、装配等工业机器人;服务机 器人;仿生鱼、蛇等仿生机器人;军用及其它机器人等)为例,撰写一篇大作业,题目自拟,以下内容仅作参考: 1) 机器人的机械结构设计(包括各部分名称、功能、传动等); 2) 机器人的运动学及动力学分析; 3) 机器人的控制及轨迹规划; 4) 驱动及伺服系统设计; 5) 电气控制电路图及部分控制子程序。 2.题目自拟,拒绝雷同和抄袭; 3.参考文献不少于7篇,其中至少有2篇外文文献; 4.报告统一用该模板撰写,字数不少于5000字,上限不限; 5.正文为小四号宋体,1.25倍行距;图表规范,标注为五号宋体; 6.用A4纸单面打印;左侧装订,1枚钉; 7.提交打印稿及03版word电子文档,由班长收齐。 8.此页不得删除。 评语: 成绩(20分):教师签名: 年月日
消防机器人发展与应用 一、我国消防机器人的市场需求 近年来,我国石油化工等行业有了飞速的发展和进步,生产过程中的易燃易爆和剧毒化学制品急剧增长,由于设备以及管理等方面的原因,导致化学危险品和放射性物质泄漏以及燃烧、爆炸的事故隐患越来越多。一旦事故发生,假如没有有效的方法、装备及设施,救援人员将无法进入事故现场要冒然采取行动,往往只会造成无辜生命的牺牲出惨重代价,结果仍不能达到预期目的,这方面各地消防及救援部门已有许多次血的教训。深圳清水河大爆炸、南京金陵石化火灾、北京东方化工厂罐区火灾等事件发生后,全国各地要求配备消防机器人的呼声愈来愈高。尤其是在明确公安消防部队作为处置各类化学危险品泄漏事故的主力军之后,在我国消防部门配备消防机器人的问题就显得更为迫切了。 二、国外消防机器人发展现状 国际上较早开展消防机器人研究的是美国和苏联,稍后,英国、日本、法国、德国等国家也纷纷开始研究该类技术。目前已有很多种不同功能的消防机器人用于救灾现场。日本投入应用的消防机器人最多。80年代,日本研制了不少于5种型号的自动行驶灭火机器人,分别配备于大阪、东京、高石、太田、蒲田等消防部门,这类机器人以内燃机或电动机作为动力,配置驱动轮或履带式行驶机构,能爬坡、越障碍;装有较大喷射流量的消防枪炮,能作俯仰和左右回转;装有气体检测仪器和电视监视设备;通过电缆或无线控制,控制距离最大为100m。另一类机器人为侦察、抢险机器人,除装有气体检测仪器和电视监视器设备外,还装有机械手,能通过遥控处理危险物品。 美国已研制出能依靠感觉信息控制的救灾智能化机器人,如1994年用于探测阿拉斯加州斯拍活火山的“但丁2号”,抓获杀人犯的RM 1一9型遥控消防机器人等。亚利桑那州消防部门研制的消防机器人,装有破拆工具和消防水枪,能一边破拆,一边喷射灭火。 英国智能化保安公司生产的RO一VEH遥控消防车已装备于中部和西部消防部门,配置为履带式或轮式行驶机构,能爬楼梯,通过电缆供电或自携蓄电池供电。装有消防水炮、摄像机或热像仪。采用有线控制方式。1985年英国中西部消防部门和Firma SAS公司联合研制的机器人消防车,用HunterIII汽车改装而成,装有双臂、水枪、探测器(温度、化学物质、辐射等)、工业电视摄像机、红外线装置。机械手用来启闭阀门、搬移物品或开门等。 国际上对消防机器人的研究可分为三个阶段(三代),第一代是程序控制消防
第一章绪论 1. 机器人学(Robotics)它包括有基础研究和应用研究两个方面,主要研究内容有:(1) 机械手设计;(2) 机器人运动学、动力学和控制;(3) 轨迹设计和路径规划;(4) 传感器(包括内部传感器和外部传感器);(5) 机器人视觉;(6) 机器人语言;(7) 装置与系统结构;(8) 机器人智能等。 2. 机器人学三原则:(1)机器人不得伤害人(2)机器人应执行人们的命令,除非这些命令与第一原则相矛盾(3)机器人应能保护自己的生存,只要这种保护行为不与第一第二原则相矛盾。 3. 6种型式的机器人: (1) 手动操纵器:人操纵的机械手,缺乏独立性; (2) 固定程序机器人:缺乏通用性; (3) 可编程机器人:非伺服控制; (4) 示教再现机器人:通用工业机器人; (5) 数控机器人:由计算机控制的机器人; (6) 智能机器人:具有智能行为的自律型机器人。 4. 按以下特征来描述机器人: (1)机器人的动作机构具有类似于人或其他生物体某些器官 ( 如肢体、感官等 ) 的功能; (2)机器人具有通用性,工作种类多样,动作程序灵活易变,是柔性加工主要组成部分; (3)机器人具有不同程度的智能,如记忆、感知、推理、决策、学习等;(4)机器人具有独立性,完整的机器人系统,在工作中可以不依赖于人的干预。 5. 机器人主要由执行机构、驱动和传动装置、传感器和控制器四大部分构成 6. 控制方式主要有示教再现、可编程控制、遥控和自主控制等多种方式。 7. 示教-再现即分为示教-存储-再现-操作四步进行。 8. 控制信息顺序信息:位置信息:时间信息: 9. 位置控制点位控制-PTP(Point to Point): 连续路径控制-CP(Continuous Path): 10. 操纵机器人可分为两种类型:能力扩大式机器人:遥控机器人: 11. 第三代智能机器人应具备以下四种机能:运动机能感知机能: 思维能力:人-机对话机能: 智能机器人是一种“认知-适应"的工作方式。 12.目前我国机器人的发展正朝着实用化、智能化和特种机器人的方向发展。
Decoupling Scheme of Tracking Loop of Seeker Based on Disturbance Compensation XXXXXX1, XXXXXXX 2, XXXXXXXX 2 (1.XXXXXXXXXXXXXXXXXXXXXXX; 2XXXXXXXXXXXXXXXXXXXXXX) Abstract:To get line-of-sight rate of high-accuracy for guidance, finishing aerial attack and intercept when the missile is controlled by lateral jets which will cause high frequency disturbance to missile attitude, a new decoupling scheme is proposed based on disturbance compensation in this paper. Decoupling-ability, tracking performance and noise rejection ability are analyzed and compared with the two existing method. Simulation and analysis show the effectiveness of the scheme proposed. Keywords:Guidance; Lateral jets; Line-of-sight rate; Decoupling; high-accuracy; compensation Introduction Contemporary military strategy has developed from underlining quantity advantage to technical quality advantage. Precision guided weapon is the main way of physical killing, and perform an important role in informatization local wars [1]-[3]. Precision guidance technology is critical for the precision guided weapon, so it is always studied by experts and researchers from many countries. Seeker is a kind of measuring component in controlling loop of homing guidance [4]. It is required to output information of line-of-sight (LOS for short) rate for guidance. So the precision of its output, LOS rate, affects controlling precision of terminal guidance directly. While a seeker is in the state of tracking, the antenna on it should track the direction of the target. A seeker works on a moving missile. So the disturbance caused by the missile body movement must be separated from the antenna to keep it stable in the inertial space [4]-[5]. The traditional design idea is to use a stabilization loop to attenuate the LOS output caused by body disturbance. We call it traditional multi-loop (TML for short) scheme [4]-[6]. There are also some schemes based on TML scheme, for example, decoupling-loop scheme which changes the position of the loop’s output to improve the decoupling-ability and at the same time have some advantages on design of guidance [7]-[8]. However, it is difficult to decouple disturbance by using the schemes mentioned above. Line-of-sight reconstruction(LOSR for short) scheme, by F.William and Paul Zarchan, can decouple completely in ideal conditions in which the transfer function of the receiver and the gyro are both equal to 1 [9]. In fact, these two conditions can’t be satisfied in the presence of high-frequency disturbance. In modern war, missiles need larger maneuverability to intercept aerial target with high speed and large maneuverability. New types of physical actuators bring high-frequency characteristics to missile movement. The high-frequency characteristics require more effective decoupling method for the seeker. Considering weight and cost, the open-loop gain can’t be too high while the time constant of the servo motor and the gyro fixed on the antenna can’t be too small. These restrictions limit further enhance of decoupling-ability. The existing schemes can only reject disturbance in low frequency segment and very high frequency segment effectively. In the frequency segment which missile moving disturbance can actually reach, decoupling-ability of seekers becomes weaker when missile movement frequency turns high. In fact, missile disturbance is able to be measured. Gyro fixed on missile for guidance and attitude
第三章 多元正态分布 多元正态分布是一元正态分布在多元情形下的直接推广,一元正态分布在统计学理论和应用方面有着十分重要的地位,同样,多元正态分布在多元统计学中也占有相当重要的地位。多元分析中的许多理论都是建立在多元正态分布基础上的,要学好多元统计分析,首先要熟悉多元正态分布及其性质。 第一节 一元统计分析中的有关概念 多元统计分析涉及到的都是随机向量或多个随机向量放在一起组成的随机矩阵,学习多元统计分析,首先要对随机向量和随机矩阵有所把握,为了学习的方便,先对一元统计分析中的有关概念和性质加以复习,并在此基础上推广给出多元统计分析中相应的概念和性质。 一、随机变量及概率分布函数 (一)随机变量 随机变量是随机事件的数量表现,可用X 、Y 等表示。随机变量X 有两个特点:一是取值的随机性,即事先不能够确定X 取哪个数值;二是取值的统计规律性,即完全可以确定X 取某个值或X 在某个区间取值的概率。 (二)随机变量的概率分布函数 随机变量X 的概率分布函数,简称为分布函数,其定义为: )()(x X P x F ≤= 随机变量有离散型随机变量和连续型随机变量,相对应的概率分布就有离散型概率分布和连续型概率分布。 1、离散型随机变量的概率分布 若随机变量X 在有限个或可列个值上取值,则称X 为离散型随机变量。 设X 为离散型随机变量,可能取值为1x ,2x ,…,取这些值的概率分别为1p ,2p ,…, 记为 k k p x X P ==)((Λ,2,1=k ) 称k k p x X P ==)((Λ,2,1=k )为离散型随机变量X 的概率分布。 离散型随机变量的概率分布具有两个性质: (1) 0≥k p ,Λ,2,1=k (2)11 =∑ ∞ =k k p 2、连续型随机变量的概率分布 若随机变量X 的分布函数可以表示为 dt t f x F x ?∞-=)()( 对一切R x ∈都成立,则称X 为连续型随机变量,称 )(x f 为X 的概率分布密度函数,简
招标投标企业报告哈工大机器人智能制造有限公司
本报告于 2019年9月24日 生成 您所看到的报告内容为截至该时间点该公司的数据快照 目录 1. 基本信息:工商信息 2. 招投标情况:中标/投标数量、中标/投标情况、中标/投标行业分布、参与投标 的甲方排名、合作甲方排名 3. 股东及出资信息 4. 风险信息:经营异常、股权出资、动产抵押、税务信息、行政处罚 5. 企业信息:工程人员、企业资质 * 敬启者:本报告内容是中国比地招标网接收您的委托,查询公开信息所得结果。中国比地招标网不对该查询结果的全面、准确、真实性负责。本报告应仅为您的决策提供参考。
一、基本信息 1. 工商信息 企业名称:哈工大机器人智能制造有限公司统一社会信用代码:91430600MA4PNLMQ22工商注册号:/组织机构代码:MA4PNLMQ2 法定代表人:梁先仁成立日期:2018-06-28 企业类型:其他有限责任公司经营状态:存续 注册资本:5000万人民币 注册地址:湖南城陵矶新港区云港路欣登孵化器办公楼3楼 营业期限:2018-06-28 至 2048-06-27 营业范围:机器人技术咨询,机器人开发,机器人零配件组装,机器人零配件、专用设备的销售,机械技术开发服务,机械技术咨询、交流服务,计算机技术开发、技术服务,自动识别和标识系统开发及应用,电子、通信与自动控制技术研发,节能技术开发服务、咨询、交流服务、转让服务,工业机器人、具有独立功能专用机械、工业自动控制系统装置、物料搬运设备、海洋工程专用设备、冶金专用设备、航空、航天器及设备、船用配套设备的制造,金属切割及焊接设备制造,激光器件制造,光电子产品制造,自营和代理各类商品及技术的进出口(国家限制经营或禁止进出口的商品和技术除外)。(依法须经批准的项目,经相关部门批准后方可开展经营活动) 联系电话:*********** 二、招投标分析 2.1 中标/投标数量 企业中标/投标数: 个 (数据统计时间:2017年至报告生成时间) 7
机器人技术课程作业——PUMA机器人 如上图所示的PUMA机器人,要求实现右图所示的运动,求解: ①建立坐标系; ②给出D-H参数表; ③推导正运动学、逆运动学; ④编程得出工作空间。 解: ①建立坐标系 a、建立原始坐标系
b、坐标系简化 ②给出D-H参数表 a、PUMA机器人的杆件参数 d0.6604m,1 d 0.14909m, 2 d 0.43307m, 4 d 0.05625m 6 a 0.4318m,a3 0.02032m 2 b、D-H参数表 关节i i i L i d i 运动范围 1 90 0 0 0 -160 o~160o o o 2 0 -90 0 d2 0.14909m -225 ~45 3 -90 0 a2 0.4318m 0 -45 o ~225o 4 0 -90 a3 0.02032m d4 0.43307m -110 o ~170o 5 0 90 0 0 -100 o ~100o 6 0 -90 0 d6 0.05625m -266 o ~266o
③推导正运动学、逆运动学 a、正运动学推导 c s0a i i i 1 由式i1 T i s c c c s d s i i1i i1i1i i1 s s c s c d c i i1i i1i1i i1 可得:0001 c s 1100c s 22 00c s0a 332 0 T 1s c 00 11 0010 1 T 2 001 d 2 s c 22 00 2 T 3 s c 00 33 0010 000100010001 c s0a 443 c s 55 00c s 66 00 3 T 4001 d 4 s c 44 00 4 T 5 0010 s c 55 005T 6 0010 s c 66 00 000100010001 由0012345 T T T T T T T,得机械手变换矩阵: 6123456 n o a p x x x x 0 T 6n o a p y y y y n o a p z z z z 0001 n c(c c c c s s c)s c s c c c s s s c s x236541641236516541641 n c(c c c s s s s)s c s s c c s c s c c y236541641236516541641 n s(c c c s s)c c s z23654642365 o c(s c c c c s c)s s s c s c s s c c s x236541641236516541641 o c(s c c s c s s)s s s s s s c c c c c y236541641236516451641 o s(s c c s s)c c s z23654642365 a c s c c s c c s s s x235412351541 a c s c s s c s s s c y235412351541 a c c s s c z2352354
多元统计分析第三章假设检验与方差分析
第3章 多元正态总体的假设检验与方差分析 从本章开始,我们开始转入多元统计方法和统计模型的学习。统计学分析处理的对象是带有随机性的数据。按照随机排列、重复、局部控制、正交等原则设计一个试验,通过试验结果形成样本信息(通常以数据的形式),再根据样本进行统计推断,是自然科学和工程技术领域常用的一种研究方法。由于试验指标常为多个数量指标,故常设试验结果所形成的总体为多元正态总体,这是本章理论方法研究的出发点。 所谓统计推断就是根据从总体中观测到的部分数据对总体中我们感兴趣的未知部分作出推测,这种推测必然伴有某种程度的不确定性,需要用概率来表明其可靠程度。统计推断的任务是“观察现象,提取信息,建立模型,作出推断”。 统计推断有参数估计和假设检验两大类问题,其统计推断目的不同。参数估计问题回答诸如“未知参数θ的值有多大?”之类的问题,而假设检验回答诸如“未知参数θ的值是0θ吗?”之类的问题。本章主要讨论多元正态总体的假设检验方法及其实际应用,我们将对一元正态总体情形作一简单回顾,然后将介绍单个总体均值的推断, 两个总体均值的比较推断,多个总体均值的比较检验和协方差阵的推断等。 3.1一元正态总体情形的回顾 一、 假设检验 在假设检验问题中通常有两个统计假设(简称假设),一个作为原假设(或称零假设),另一个作为备择假设(或称对立假设),分别记为0H 和1H 。 1、显著性检验 为便于表述,假定考虑假设检验问题:设1X ,2X ,…,n X 来自总体),(2 σμN 的样本,我们要检验假设 100:,:μμμμ≠=H H (3.1) 原假设0H 与备择假设1H 应相互排斥,两者有且只有一个正确。备择假设的意思是,一旦否定原假设0H ,我们就选择已准备的假设1H 。 当2 σ已知时,用统计量n X z σ μ -=
XX大学 硕士学位论文开题报告 题目: 院(系)____________________________ 学科____________________________ 导师____________________________ 研究生 __________________________________ 学号____________________________ 开题报告日期 ______________________________ 研究生院制 二?一二年三月
一、开题报告应包括下列主要内容: 目录 1.课题来源及研究的背景和意义 1.1.课题的来源 1.2.课题研究的背景和意义(不少于 500 字) 2.国内外在该方向的研究现状及分析 2.1.国外研究现状 2.2.国内研究现状 (注意对所引用国内外文献的准确标注) 2.3.国内外文献综述的简析(不少于 500 字)(综合评述:国内外研究取得的成果,存在的不足或有待深入研究的问题)3.主要研究内容(不少于 1000 字) (撰写宜使用将来时态,切忌将论文目录直接作为研究内容,要突出本人研究内容)4.研究方案及进度安排,预期达到的目标和取得的研究成果 4.1.研究方案(不少于 500 字) 4.2.预期达到的目标和取得的研究成果 4.3.进度安排(建议从进入研究课题时间开始) 5.为完成课题已具备和所需的条件和经费 6.预计研究过程中可能遇到的困难和问题,以及解决的措施 7.主要参考文献 二、对开题报告的要求 1.开题报告的字数应在 5000 字以上; 2.参考文献应在___篇以上,其中外文资料应不少于三分之一。硕士研究生应在导师的指导下着重查阅近年内发表的中、外文期刊文章,参考的近五年内(从开题时间算起)文献一般不少于三分之一。本学科的基础和专业课教材一般不应列为参考文献。 三、开题报告时间应最迟不得超过第三学期的第三周末。 四、如硕士生首次开题报告未通过,需在一个月内再进行一次。若仍不通过,则停止硕士论文工作。 五、开题报告进行后,此表同硕士学位论文开题报告评议结果存各系(院)研究生秘书书处,以备 研究生院及所属学院进行检查。 六、字体、字号及其他规定 论文中所用中文字体(除各级标题外)为宋体,各级标题用黑体;论文中所用数字、英文为新罗马字体。 节标题小__号字,建议段前0.5行,段后0.5行; 条标题—号字,建议段前0.5行,段后0.5行;
第三章多元统计分析 §4 聚类分析 分类是人类认识世界的方式,也是管理世界的有效手段。在科学研究中非常重要,许多科学的研究都是从分类研究出发的。没有分类就没有效率;没有分类,这个世界就没有秩序。瑞典博物学家林奈(Carl von Linnaeus, 1707-1778)因为对植物的分类成就被后人誉为“分类学之父”,后人评价说“上帝创世,林奈分类”——能与上帝的名字并列的人不多,另一个著名的科学家是牛顿。由此可见分类成果的重要性。最初分类都是定性了,后来随着科学的发展产生了定量分类技术,包括基于统计学的聚类方法和基于模糊数学的聚类技巧。本节主要讲述统计学意义的数字分类方法思想和过程。 1 聚类的分类 分类研究的成果的重要性决定了方法的重大实践意义。在任何一门语言的语法学中,都要对词词汇进行分类,词汇分类可以根据词性:名词,动词,形容词……;英文还可以根据首字母分类:ABCD……;汉字则还可以根据笔划,如此等等。在生物学中,将生物划分为:界,门,纲,目,科,属,种。例如白菜(种)属于油菜属、十字花科、十字花目、双子叶植物纲、被子植物亚门、种子植物门、植物界;老虎(种)则属于猫属、猫科、食肉目、哺乳动物纲、脊椎动物亚门、脊索动物门、动物界。这样,整个世界的生物就可以建立一个等级谱系,根据这个谱系,我们可以比较容易地判断那些生物已经认识了,哪些生物尚未发现,哪些生物已经灭绝了。如果发现了新的生物,就可以方便地将其归类。在天文学中,天体可以根据视觉区域分类,也可以根据发光性质与光谱特征进行分类。在地理学中,城市既可以根据地域空间分类,也可以根据城市的职能进行分类。 表3-3-1 各种生物在分类学上的位置举例 位置白菜虎 界植物界动物界 门种子植物门脊索动物门 亚门被子植物亚门脊椎动物亚门 纲双子叶植物纲哺乳动物纲 目十字花目食肉目 科十字花科猫科 属油菜属猫属 种白菜虎 当我们走进一家图书馆,如果它们的图书没有分类编目,我们要找到一本图书与大海捞针没有什么区别。分类的方式也会影响工作的效率。书店的图书一般根据科学门类进行分类摆设,但有一段时间一家书店改为按照出版单位进行分类排列,结果读者很难找到所需图书,这家原本效益挺好的书店很快收到了消极影响。 早期的分类,一般根据事物的属性与特征进行划分,属于定性分类的范畴。随着人们认识的深入和研究对象复杂程度的增加,单纯的定性分类方法就不能满足要求了,于是产生了定量分类技术,即所谓数字分类。本节要讲述的就是根据多个指标进行数字分类的一种多元
盘点:中国十大正在崛起的机器人公司 “百舸争流”用在目前的国内机器人行业在适合不过了,目前国内大大小小的机器人公司都快数不清。机器人市场都快呈现饱和状态,但是还有不少上市公司投资机器人,准备进军机器人行业。每一个城市都有代表性的机器人公司,那么这些机器人公司的硬件和软件又怎样呢?一起看看专家的点评吧!1、海尔哈工大机器人技术有限公司哈尔滨海尔哈工大机器人技术有限公司是海尔集团与哈尔滨工业大学合资成立的高新技术企业,是国家863计划机器人产业化基地,是国家机器人和自动化技术应用领域的核心骨干企业之一。公司自成立伊始,即自动化设备、工业机器人应用工程、直角坐标机器人及智能服务机器人几大类高科技产品的设计、研发、制造和销售。经过几年的研发历程,已掌握了多项机器人产品关键技术,拥有8项专利。产品和服务涉及汽车及其零部件、工业电器、电子通讯、食品饮料、医疗、日化、家电、航天、军工等广阔的工业领域。罗百辉:该公司主要研究项目为工业自动化生产线,其次为服务型机器人,海尔和哈工大两强联手,实力可想而知。我个人感觉该公司的工业生产线缺乏国际品牌影响力,服务型机器人在工业设计和实事求是地面向市场方面有欠缺(尽管该公司已经研究服务型机器人很多年了,但尚未见有影响力的机器人面
世)2、北京汉库机器人技术有限公司北京汉库机器人技术有限公司是专业从事高校创新实验室建设的高新技术企业。总部位于中关村科技园区,在广东和浙江分别有生产制造基地。拥有多项专利技术,在机器人教育及科研和电子、机械等创新实验室领域的研究和开发始终保持着领先地位。一些中央领导关心该公司,享受很多国家扶持政策。罗百辉:该公司主要研制小型教育机器人,特别是小仿人形机器人,技术含量有限但市场前景看好(与自动生产线、医疗机器人、空间站机械臂、月球车等相比技术含量确实低)。3、北京拓博尔机器人科技有限公司北京拓博尔机器人科技有限公司 是以机器人开发和机电系统集成为主营业务的国家级高科 技企业。公司成立于2004年10月,位于中关村上地产业开发区留学生创业园,曾经与北航机器人研究所有过密切合作,为海军总医院研制医疗机器人,某核工厂生产线,激光熔敷修复机器人工作站,五指仿人形灵巧手,为中国科技馆研制抓球机器手和下棋机器人等。参与研制大量国家尖端项目。罗百辉:该公司研制的部分项目涉及国防机密不得而知,技术极为尖端。与其他公司不同,该公司往高精尖方向发展,尽管这条路暂时看起来不如低技术机器人那么宽阔,但其“高尚”程度是其他公司无法相比的。4、上海电气中央研究院服务机器人分院致力于研制全系统的服务机器人,由该公司的多种家用机器人为人们提供完备的服务,比如照看小
机器人技术与系统国家重点实验室(哈尔滨工业大学) 开放课题基金管理办法 2007年11月30日 一、总则 第一条为推动机器人技术领域相关基础研究和技术的自主创新,促进学术交流,发现和培养本领域的科技人才,机器人技术与系统国家重点实验室(哈尔滨工业大学)(以下简称实验室)设立开放课题研究基金(以下简称基金),资助国内外相关技术领域的科技工作者依托本实验室的开放研究环境开展研究工作。第二条实验室每年定期公布一次《机器人技术与系统国家重点实验室20XX 年开放研究基金指南》(以下简称《指南》),对每年度资助的具体研究内容作明确界定。 二、资助对象 第三条申请者申请当年的年龄应不超过40岁(含)。 第四条申请者一般应具有高级专业技术职称或博士学位。具有中级专业技术职务但未获得博士学位的研究人员,经两名具有高级专业技术职务的同行专家推荐,亦可申请。 第五条实验室接收国内、外研究人员自带课题和经费,利用本实验室设备条件开展科学研究。 三、开放课题申请 第六条申请采取集中受理方式。申请课题须符合《指南》资助范围的研究,强调学术思想的新颖性,重点支持有应用前景的创新性基础研究,并鼓励新兴学科方向上的课题申报。 第七条申请者同期只能申请一项,每个项目的申请者限为一人。申请者和具有高级专业技术职务的项目组主要成员,当年申请及承担(含参加)在研的面上项目数合计不得超过两项。不具有高级专业技术职务的申请者,当年申请及负责在研的面上项目数合计不得超过一项,但参加项数不限。
第八条基金项目的研究年限一般为二年,具体情况因题而异。研究工作开始时间为年度的1月1日。 第九条申请课题的研究内容具体,研究方法和技术路线合理、可行,研究目标明确、可考核,经费预算合理。申请者与项目组成员具备实施该课题的研究能力和时间保证。 第十条基金资助强度一般为2-5万元,根据具体情况因题而异。由学术委员会和实验室主任审议决定。 第十一条特别优秀的或有明确前景的课题可滚动支持。 四、开放课题评审与批准 第十二条实验室对开放课题进行初审,对于不符合申请条件的基金申请书不予报送学术委员会。 第十三条实验室学术委员会以会议或书面通讯评议方式对基金申请项目进行评审,每项申请一般由3位委员进行评审。根据择优资助的原则,批准资助课题及资助额度。 第十四条实验室将学术委员会的评审结果报送主管部门。 第十五条根据评审结果,由实验室主任于每年1月签发立项批准书,通知申请者及其所在单位。 五、项目的实施与管理 第十六条申请者接到项目批准通知后,须按批准意见撰写资助项目计划书。逾期不报且在规定期限内未说明理由的项目,视为自动放弃。 第十七条研究计划实施中,涉及到预定目标、研究内容、计划实施等的改变、以及提前结题或延长年限等变动,项目负责人须提出报告,经所在单位审查签署意见后,报实验室审批。 第十八条一般情况下,项目负责人不得代理或更换,遇有特殊情况,所在单位应安排合适代理人,并报实验室备案。项目负责人工作调动,可依据具体情况选择在原单位或调入单位完成基金项目,但须调入、调离双方及实验室签署意见,并报实验室审批及备案。 第十九条实验室每年度对基金项目的执行情况进行检查。项目负责人应于每年度结束时提交《基金资助项目年度进展报告》。对不报送进展报告、工作无进展、经费使用不当的项目,缓拨下期经费。项目负责人如不能纠正、补报,实验室将中止资助。