生产实习课教案首页
课时分配
项目:伺服参数的设定
、组织教学
1. 检查学生出勤情况;
2. 检查学生劳动防护用品的穿戴情况及实习工具的准备情况;
3. 宣布上课。
二、项目指导
1. 复习旧课(提问)
说出下列各参数的作用?
1020
1828
1829
2. 项目引入
在FANUC 0i 系列中,伺服参数是最重要的,也是维修、调试中干预最多的参数
3. 相关知识
设定电机ID 号
F-ROM中写有很多种电机数据,如何从中选择一组适合电机数据写到
S-RAM 中呢?正确选择各轴所使用的电机代码(MOTORID NO.——Identification 即电机“身份识别”号),就可以从F-ROM中读
取相匹配的数组。
具体方法为;按照电机型号和规格号(中间4位:A06B-XXXX-BXXX
从电机规格表中选择相应的电机代码(参见下表)
丫轴
00001010
197*
2
1
1 -111
8 192
10000 f0000
.JOG 寧半屮申 ** * t * + I 1 0 : 50 : -1 9
电机ID 号对应表参见下面的表格。对于本手册中没有叙
述到的电机
型号,请参照ai 系列伺服放大器说明书
对于ai 和Bi 系列伺服电机对照下列表,不带括号的电机类型是对 于HRV1的,带括号的电机类型是对 HRV2和HRV3勺。
电机型号 B 2/4000is
B 4/4000is
B 8/3000is
B 12/3000is
B 22/2000is
电机规格 0061(20A) 0063(20A) 0075(20A) 0078(40A) 0085(40A) 电机代码 153(253)
156(256)
158(258)
172(272)
174(274)
电机型号 a c4/3000i
a c8/2000i
a c12/2000i
a c22/2000i
a c30/1500i
电机规格 0221 0226 0241 0246 0251 电机代码 171(271)
176(276)
191(291)
196(296)
201(301)
电机型号 a 1/5000i
a 2/5000i
a 4/3000i
a 8/3000i
a 12/3000i
电机规格 0202 0205 0223 0227 0243 电机代码 152(252)
155(255)
173(273)
177(277)
193(293)
电机型号 a 22/3000i
a 30/3000i
a 40/3000i
a 40/3000i
FAN
电机规格 0247 0253 0257 0258-B_1_
电机规格 197(297)
203(303)
207(307)
208(308)
电机型号 a 4/5000is
a 8/4000is
a 12/4000is
a 22/4000is
a 30/4000is
电机规格 0215 0235 0238 0265 0268 电机代码
165(265)
185(285)
188(288)
215(315)
218(318)
电机型号
a 40/4000is a 50/3000is a 50/3000is a 100/2500is a 200/2500is
数数量
冲冲容 脉脉器 定
馈馈数 设反
反计
向苦
方速位
参
电机ID 号
x 轴
CMR (指令倍乘比)指令倍乘比的含义;
f^MI82O
伺服位置控制是指令与反馈不断比较运算的结果,但是实际移动距离是电机轴与滚珠丝杠综合运动的结果,那么指令10mm电机转多少圈才能够让工作台移动10mm呢?这里取决于丝杠螺距和电机反馈脉冲数等关键参数,假如滚珠丝杠螺距为10mm那么电机旋转一圈工作台移动10mm 又怎样在CNC指令10mm后,电机正好旋转一圈,并且反馈的脉冲数正好与指令脉冲数吻合,
FANUC伺服的解决方案就是引入一个当量概念
――“指令当量=反馈当量”也就说发出的脉冲数应和反馈的脉冲数相匹配。CM(指令倍乘比)与DM(N/M)就是“调整” “指令当量”和“反馈当量”的参数,通俗的讲它是一个“凑数”的过程,就是想方设法使指令与反馈脉冲数建立一个合理的关系。
注意:
最小指令增量、检测单位、
CMR 和DMR 之间的关系如下:
最小指令增量 =CMR X 检测单位
电机每转移动量
指令被乘比设定原则如下;
PRM 1820 ---------------
通常,指令单
位
二检测单位(CMR=),因此参数1820#,指令倍乘比设为2 关断电源,然后再打开电源。
下面进一步完善设定数据
检测倍率(DMR 也称进给齿轮比 N/M (F.FG )的设置
PRM 2084 PRM 2085
设定半闭环 a 脉冲编码器
柔性进给齿轮的 N
柔性进给齿轮的 M
指令倍乘比
对分子和分母,最大设定值(约分后)是32767。
对柔性齿轮比,a i脉冲编码器电机每转有1000000个脉冲。
如果计算电机转数时使用了n值,比如使用齿轮和齿条,假定n值近似为
355/113
实际简化后公式为:
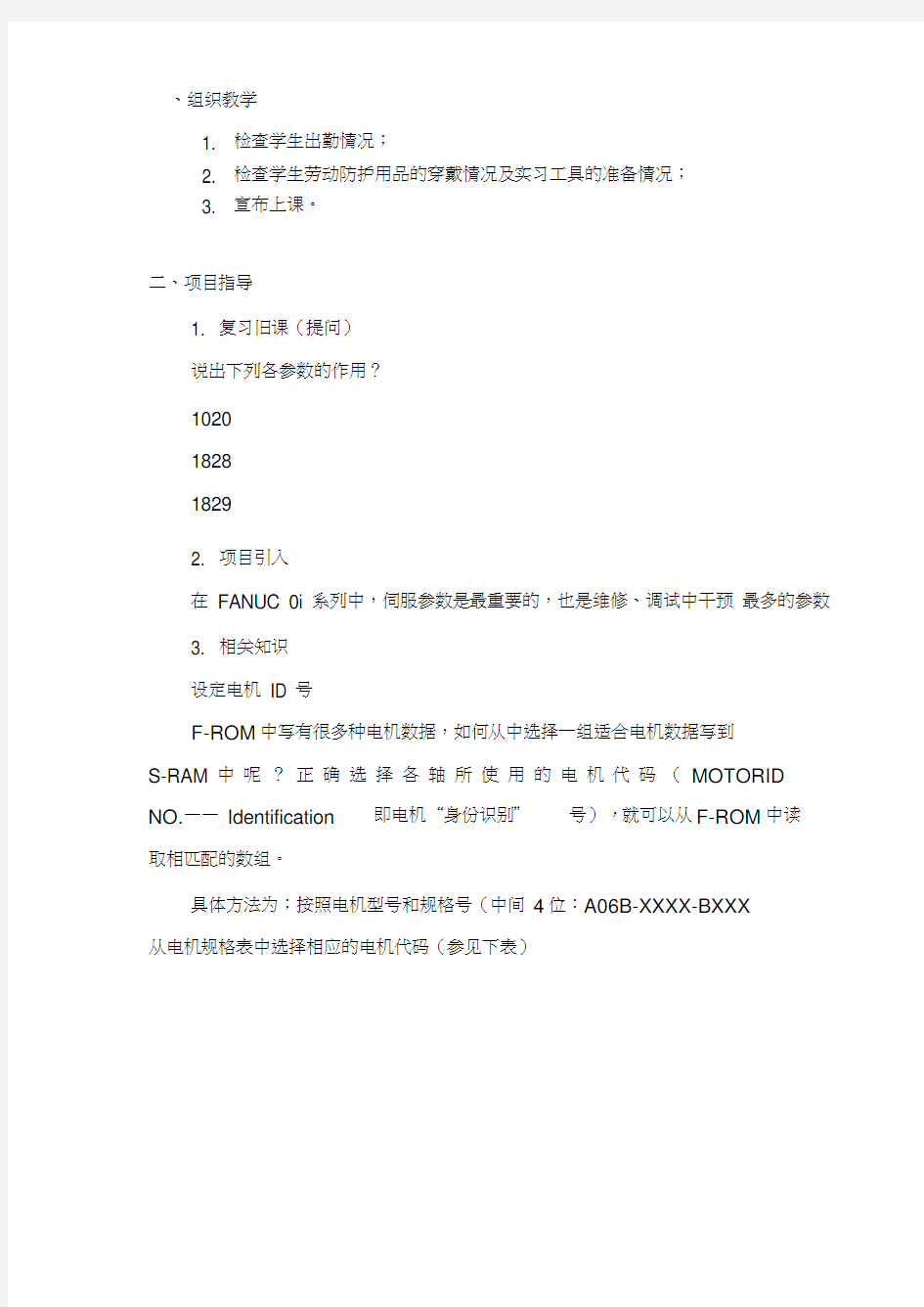
N = 电机每转1转所需的位置脉冲数的最小公约数
这里有一个关键词“电机每转1转所需的位置反馈脉冲”,物理含义是:电机旋转一转,工作台移动的距离换算成位置脉冲数,而距离与位置脉冲数的关系取决于伺服轴的基本参数1004#最小输入单位的指定,通常该值为0.001mm并代表1个脉冲数,假如电机转一转工作台移动10mm最小指令单位是0.001mm相当于电机转一转产生10000个脉冲数。参考下图:
<-—10mm/0.001mm =10000 (个脉
移动方向
PRM 2022
---------------- 电机回转方向 ------
+ 111正向,-111负向
速度脉冲数,位置脉冲数
串行a i 脉冲编码器或串行a 脉冲编码器时:
参数号
设定单位1/1000mm
设定单位1/10000mm
闭环
半闭环
闭环 半闭环
高分辨率设定
2000 xxxxxxx0
XXXXXXX1 分离型检测器
1815 00100010
00100000
00100010
00100000
速度反馈脉冲
2023 4X2048=8192 819
位置反馈脉冲
2024
NS
12500
NS/10
1250
NS 为电机一转的位置反馈脉冲数(4倍后)。 全闭环时,还需设定PRM 200蓉3= 1,# 4= 0
参考计数器的设定主要用于栅格方式回原点,根据参考计数器的容 量,每隔该容量脉冲数溢出产生一个栅格脉冲,栅格(电气栅格)脉冲 与光电编码器中一转信号(物理栅格)通过 1850#参数偏移后,作为回 零的基准栅格。
参见下图所示
PRM 1821
1 JWLTL
—参考计数
PCZ
参考计数器容量设定值是指电机转一转所需的(位置反馈)脉冲数, 或者设定为该数能够被整数除尽的分数。
也可以理解为返回参考点的栅格间隔 所以,参考计数器容量 二 栅格间隔/检测单位 栅格间隔=脉冲编码器1转的移动量
参考计数器容量
PRM 1821
各轴的参考计数器容量
反馈
溢出脉冲作
PRM 2084/2085
N/M
PCB PCZ