
《现代控制理论基础》第五章(讲义)
5.6.3 二次型最优控制问题
现在我们来研究最优控制问题。已知系统方程为
(5.21)
(5.22) 确定最优控制向量的矩阵K,使得性能指标
达到极小。式中Q是正定(或正半定)Hermite或实对称矩阵,R是正定Hermite 或实或实对称矩阵。注意,式(5.22)右边的第二项是考虑到控制信号的能量损耗而引进的。矩阵Q和R确定了误差和能量损耗的相对重要性。在此,假设控制向量u(t)是不受约束的。
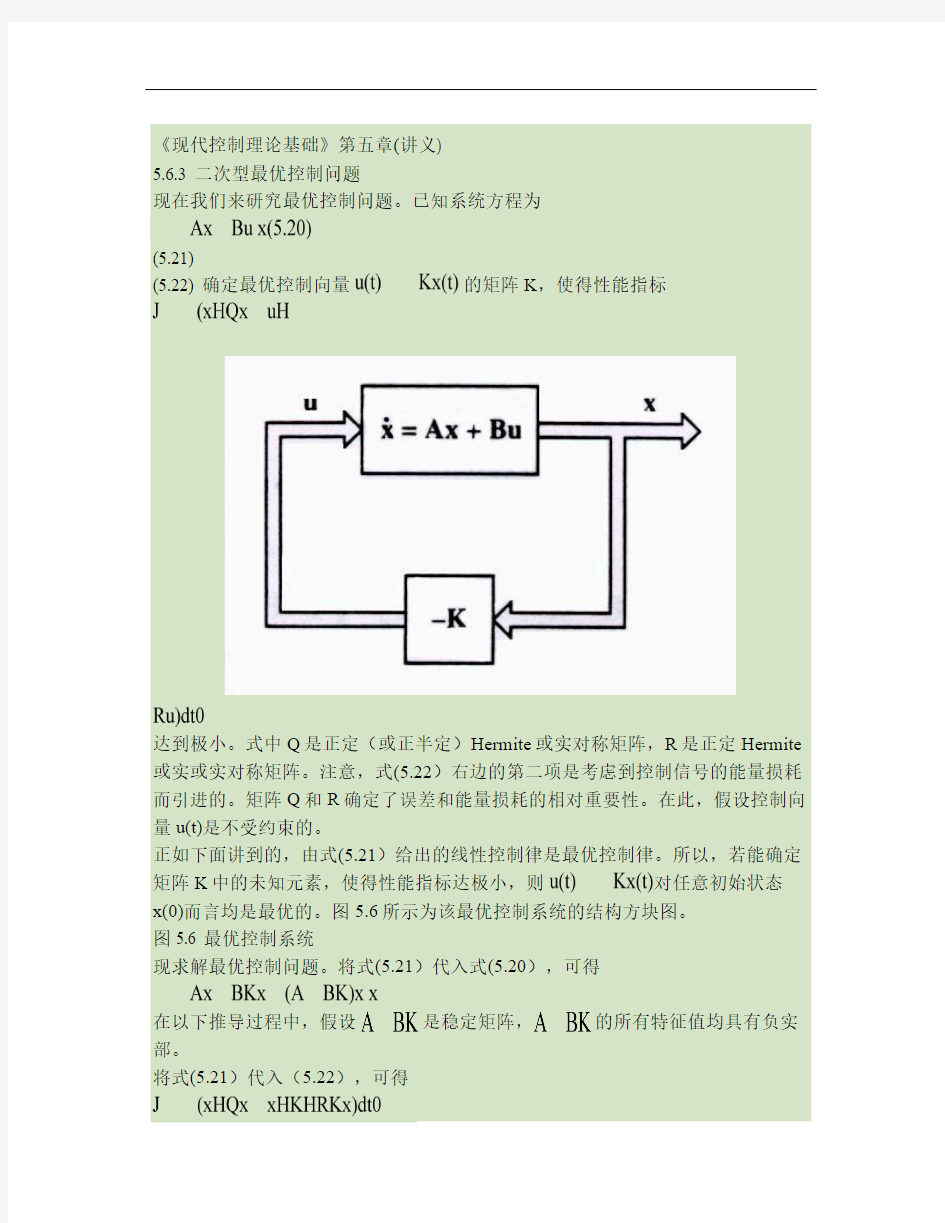
正如下面讲到的,由式(5.21)给出的线性控制律是最优控制律。所以,若能确定矩阵K中的未知元素,使得性能指标达极小,则对任意初始状态
x(0)而言均是最优的。图5.6所示为该最优控制系统的结构方块图。
图5.6 最优控制系统
现求解最优控制问题。将式(5.21)代入式(5.20),可得
在以下推导过程中,假设是稳定矩阵,的所有特征值均具有负实部。
将式(5.21)代入(5.22),可得
依照解参数最优化问题时的讨论,取
《现代控制理论基础》第五章(讲义)
式中的P是正定的Hermite或实对称矩阵。于是
比较上式两端,并注意到方程对任意x均应成立,这就要求
(5.23)的正定矩阵P。 (5.23) 根据Lyapunov第二法可知,如果是稳定矩阵,则必存在一个满足式
因此,该方法由式(5.23)确定P的各元素,并检验其是否为正定的(注意,这里可能不止一个矩阵P满足该方程。如果系统是稳定的,则总存在一个正定的矩阵P满足该方程。这就意味着,如果我们解此方程并能找到一个正定矩阵P,该系统就是稳定的。满足该方程的其他矩阵P不是正定的,必须丢弃)。性能指标可计算为
由于假设A-BK的所有特征值均具有负实部,所以。因此
于是,性能指标J可根据初始条件x(0)和P求得。 (5.24)
为求二次型最优控制问题的解,可按下列步骤操作:由于所设的A是正定Hermite或实对称矩阵,可将其写为
式中T是非奇异矩阵。于是,式(5.23)可写为
上式也可写为
求J 对K的极小值,即求下式对K的极小值
(见例5.21)。由于上面的表达式不为负值,所以只有当其为零,即当
时,才存在极小值。因此
定义时,其最优控制律是线性的,并由 (5.25) 式(5.25)给出了最优矩阵K。所以,当二次型最优控制问题的性能指标由式(5.22)
《现代控制理论基础》第五章(讲义)
给出。式(5.25)中的矩阵P必须满足式(5.23),即满足下列退化方程
式(5.26)称为退化矩阵黎卡提方程,其设计步骤如下: (5.26)
1、求解退化矩阵黎卡提式(5.26),以求出矩阵P。如果存在正定矩阵P(某些系统可能没有正定矩阵P),那么系统是稳定的,即矩阵是稳定矩阵。
2、将矩阵P代入式(5.25),求得的矩阵K就是最优矩阵。
例5.9 是建立在这种方法基础上的设计例子。注意。如果矩阵是稳定的,则此方法总能给出正确的结果。
确定最优反馈增益矩阵K还有另一种方法,其设计步骤如下:
1、由作为K的函数的式(5.23)中确定矩阵P。
2、将矩阵P代入式(5.24),于是性能指标成为K的一个函数。
3、确定K的各元素,使得性能指标为极小。这可通过令等于零,并解出kij的最优值来实现J对K各元素kij为极小。
这种设计方法的详细说明见例5.11和5.12。当元素kij的数目较多时,该方法很不便。
如果性能指标由输出向量的形式给出,而不是由状态向量的形式给出,即
则可用输出方程
来修正性能指标,使得J为
且仍可用本节介绍的设计步骤来求最优矩阵K。
------------------------------------------------------------------
[例5.9] 研究如图5.7所示的系统。假设控制信号为
试确定最优反馈增益矩阵K,使得下列性能指标达到极小
式中
由图5.7可看出,被控对象的状态方程为
《现代控制理论基础》第五章(讲义)
式中
图5.7 控制系统
以下说明退化矩阵黎卡提代数方程如何应用于最优控制系统的设计。求解(5.26),将其重写为
注意到A为实矩阵,Q为实对称矩阵,P为实对称矩阵。因此,上式可写为
该方程可简化为
由上式可得到下面3个方程
将这3个方程联立,解出p11、p12、p22,且要求P为正定的,可得
参照式(5.25),最优反馈增益矩阵K为
《现代控制理论基础》第五章(讲义)
因此,最优控制信号为
得出最优结果。图5.8是该系统的方块图。注意,由式(5.28)给出的控制律对任意初始状态在给定的性能指标下都能
图5.8 图5.7所示对象的最优控制
------------------------------------------------------------------
5.7 二次型最优控制问题的MATLAB解法
在MATLAB中,命令
lqr(A,B,Q,R)
可解连续时间的线性二次型调节器问题,并可解与其有关的黎卡提方程。该命令可计算最优反馈增益矩阵K,并且产生使性能指标。
在约束方程
条件下达到极小的反馈控制律
另一个命令
也可计算相关的矩阵黎卡提方程
《现代控制理论基础》第五章(讲义)
的唯一正定解P。如果为稳定矩阵,则总存在这样的正定矩阵。利用这个命令能求闭环极点或的特征值。
对于某些系统,无论选择什么样的K,都不能使为稳定矩阵。在此情况下。这个矩阵黎卡提方程不存在正定矩阵。对此情况,命令
,B,Q,R)
不能求解,详见MATLAB Prgram 5.1。
《现代控制理论基础》第五章(讲义)
------------------------------------------------------------------
[例5.10] 考虑由下式确定的系统
证明:无论选择什么样矩阵K,该系统都不可能通过状态反馈控制
来稳定(注意,该系统是状态不可控的)。定义
则
因此特征方程为
《现代控制理论基础》第五章(讲义)
闭环极点为
由于极点在s的右半平面,所以无论选择什么样的矩阵K,该系统都是不稳定的。因此,二次型最优控制方法不能用于该系统。
假设在二次型性能指标中的Q和R为
并且写出MATLAB Progam 5.1。所得的MATLAB解为
其中NaN表示“不是一个数”。每当二次型最优控制问题问题的解不存在时,MATLAB将显示矩阵K由NaN组成。
------------------------------------------------------------------
[例5.11] 考虑下式定义的系统
式中
性能指标J为
这里
假设采用下列控制
确定最优反馈增益矩阵K。
最优反馈增益矩阵K可通过求解下列关于正定矩阵P的黎卡提方程得到
其结果为
将该矩阵P代人下列方程,即可求得最可求得最优矩阵K为
《现代控制理论基础》第五章(讲义)
因此,最优控制信号为
利用MATLAB Program 5.2也能求解该问题。
------------------------------------------------------------------ [例5.12] 考虑下列系统
式中
《现代控制理论基础》第五章(讲义)
性能指标J为
式中
()
求黎卡提方程的正定矩阵R、最优反馈增益矩阵K和矩阵A-BK的特征值。
利用MATLAB Program 5.3,可求解该问题。
------------------------------------------------------------------
[例5.13] 考虑与例12.7中讨论的相同的系统。该系统的状态空间表达式为
式中
《现代控制理论基础》第五章(讲义)
假设控制信号u为
如图3.9所示。在确定最优控制律时,假设输入为零,即r =0。确定状态反馈增益矩阵K(),使得性能指标
达到极小。这里
为了得到快速响应,q11与q22、q33和R相比必须充分大。在该例中,选取
为了利用MATLAB求解,可使用命令
由MATLAB Program 5.14,可得到该例题的解。
《现代控制理论基础》第五章(讲义)
采用确定的矩阵K来研究所设计的系统对阶跃输入的响应特性。所设计的系统的状态方程为
1r
输出方程为
为求对单位阶跃输入的响应,使用下列命令
式中
MATLAB Program 5.5可求出该系统对单位阶跃的响应。图5.10画出了输出y对时间t的响应曲线,图5.11在同一张图上画出了x1,x2和x3
对t的响应曲线。 12
《现代控制理论基础》第五章(讲义)
%*****Note that matrices A,B,and K are given as tollows*****
A=[0 1 0;0 0 1;0 -2 -3];
B=[0;0;1]
K=[100.0000 53.1200 11.6711];
K1=K(1);k2=K(2);k3=K(3);
%*****The state equation for the designed system is
%xdot=(A-BK)x+Bk1r and the output equation is
%y=Cx+Du,where matrices C and D are given by******
C=[1 0 0];
D=[0];
%*****Define the state matrix,control matrix, output matrix, %and direct transmission matrix of the designed systems as AA, %BB,CC,and DD *****
AA=A-B*K;
BB=B*k1;
CC=C;
DD=D;
%*****To obtain the unit-step response curves for the first eight %seconds,enter the following command*****
t=0:0.01:8;
[y,x,t]=step[AA,BB,CC,DD,l,t);
%*****Toplot the unit-step response curve y(=xl)versus t, %enter the following command*****
plot(t,y)
grid
title(‘Unit-Step Response of Quadratic Optimal Control System’) ylabel(‘Output y=xl’)《现代控制理论基础》第五章(讲义)
图5.10 二次型最优控制系统的单位阶跃响应曲线
图5.11 x1,x2和x3对t的响应曲线
------------------------------------------------------------------
下面总结线性二次型最优控制问题的MATLAB解法。
(1) 给定任意初始条件x(t0),最优控制问题就是找到一个容许的控制向量
u(t),使状态转移到所期望的状态空间区域上,使性能指标达到极小。为了使最优控制向量u(t)存在,系统必须是状态完全可控的。
(2) 根据定义,使所选的性能指标达到极小(或者根据情况达到极大)的系统是最优的。在多数实际应用中,虽然地于控制器在“最优性”方面不会再提出任何要求,但是在涉及定性方面,还应特别指出,这就是基于二次型性能指标的设计,应能构成稳定的控制系统。
(3) 基于二次型性能指标的最优控制规律。具有如下特性,即它是状态变量的线性函数。这意味着,必须反馈所有的状态变量。这要求所有状态变量都能用于反馈。如果不是反有状态变量都能用于反馈,则需要使用状态观测器来估计不可测量的状态变量,并利用这些估值产生最优控制信号。
(4) 当按照时域法设计最优控制系统时,还需研究频率响应特性,以补偿噪 14
《现代控制理论基础》第五章(讲义)
声的影响。系统的频率响应特性必须具备这种特性,即在预料元件会产生噪声和谐振的频率范围区,系统应有较大的衰效应(为了补偿噪声的影响,在某些情况下,必须修改最优方案而接受次最优性能或修改性能指标)。
(5) 如果在式(5.22)给定的性能指标J中,积分上限是有限值,则可证明最优控制向量仍是状态变量的线性函数,只是系数随时间变化(因此,最优控制向量的确定包含最优时变矩阵的确定)。
现代控制理论试题 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
现代控制理论试题 一、名词解释(15分) 1、能控性 2、能观性 3、系统的最小实现 4、渐近稳定性 二、简答题(15分) 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系 统的那些性质 2、如何判断线性定常系统的能控性如何判断线性定常系统的能观性 3、传递函数矩阵的最小实现A、B、C和D的充要条件是什么 4、对于线性定常系统能够任意配置极点的充要条件是什么 5、线性定常连续系统状态观测器的存在条件是什么 三、计算题(70分) 1、RC 无源网络如图1所示,试列写出其状态方程和输出方程。其中,为系统的输入,选两端的电压为状态变量,两端的电压为状态变量,电压为为系统的输出y。 2、计算下列状态空间描述的传递函数g(s) 图1:RC无源网络 3、求出下列连续时间线性是不变系统的时间离散化状态方程: 其中,采样周期为T=2. 4、求取下列各连续时间线性时不变系统的状态变量解和 5、确定是下列连续时间线性时不变系统联合完全能控和完全能观测得待定参数a的 取值范围: 6、对下列连续时间非线性时不变系统,判断原点平衡状态即是否为大范围渐 近稳定: 7、给定一个单输入单输出连续时间线性时不变系统的传递函数为 试确定一个状态反馈矩阵K,使闭环极点配置为,和。 现代控制理论试题答案 一、概念题 1、何为系统的能控性和能观性 答:(1)对于线性定常连续系统,若存在一分段连续控制向量u(t),能在有限时间区间[t0,t1]内将系统从初始状态x(t0)转移到任意终端状态x(t1),那么就称此状态是能控的。 (2)对于线性定常系统,在任意给定的输入u(t)下,能够根据输出量y(t)在有限时间区间[t0,t1]内的测量值,唯一地确定系统在t0时刻的初始状态x(t0 ),就称系统在t0时刻是能观测的。若在任意初始时刻系统都能观测,则称系统是状态完全能观测的,简称能观测的。
第一章:1计量经济学研究方法:模型设定,估计参数,模型检验,模型应用 2.计量经济模型检验方式:①经济意义:模型与经济理论是否相符②统计推断:参数估计值是否抽样的偶然结果③计量经济学:是否复合基本假定④预测:模型结果与实际杜比 3.计量经济学中应用的数据类型:①时间序列数据(同空不同时)②截面数据(同时不同空)③混合数据(面板数据)④虚拟变量数据(学历,季节,气候,性别) 第二章:1.相关关系的类型:①变量数量:简单相关/多重相关(复相关)②表现形式:线性相关(散布图接近一条直线)/非线性相关(散布图接近一条直线)③变化的方向:正相关(变量同方向变化,同增同减)/负相关(变量反方向变化,一增一减不相关) 2.引入随机扰动项的原因:①未知影响因素的代表(理论的模糊性)②无法取得数据的已知影响因素的代表(数据欠缺)③众多细小影响因素综合代表(非系统性影响)④模型可能存在设定误差(变量,函数形式设定)⑤模型中变量可能存在观测误差(变量数据不符合实际)⑥变量可能有内在随机性(人类经济行为的内在随机性) 3.OLS回归线数学性质:①剩余项的均值为零②OLS回归线通过样本均值③估计值的均值等于实际观测值的均值④被解释变量估计值与剩余项不相关⑤解释变量与剩余项不相关 4.OLS估计量”尽可能接近”原则:无偏性,有效性,一致性 5.OLS估计式的统计性质/优秀品质:线性特征,无偏性特征,最小方差性特征 第三章:1.偏回归系数:控制其他解释变量不变的条件下,第j个解释变量的单位变动对被解释变量平均值的影响,即对Y平均值直接或净的影响 2.多元线性回归中的基本假定:①零均值②同方差③无自相关④随机扰动项与解释变量不相关⑤无多重共线性⑥正态性…一元中有12346 3. OLS回归线数学性质:同第二章3 4. OLS估计式的统计性质:线性特征,无偏性特征,最小方差性特征 5.为什么用修正可决系数不用可决系数?可决系数只涉及变差没有考虑自由度,如果用自由度去校正所计算的变差,可纠正解释变量个数不同引起的对比困难 第四章:1.多重共线性背景:①经济变量之间具有共同变化趋势②模型中包含滞后变量③利用截面数据建立模型可出现..④样本数据自身原因 2.后果:A完全①参数估计值不确定②csgj值方差无限大B不完全①csgj量方差随贡献程度的增加而增加②对cs区间估计时,置信区间区域变大③假设检验用以出现错误判断④可造成可决系数较高,但对各cs估计的回归系数符号相反,得出错误结论 3.检验:A简单相关系数检验法:COR 解释变量.大于0.8,就严重B方差膨胀因子法:因子越大越严重;≥10,严重C直观判断法:增加或剔除一个解释变量x,估计值y发生较大变化,则存在;定性分析,重要x标准误差较大并没通过显著性检验时,则存在;x回归系数所带正负号与定性分析结果违背,则存在;x相关矩阵中,x之间相关系数较大,则存在D逐步回归检验法:将变量逐个引入模型,每引入一个x,都进行F检验,t检验,当原来引入的x由于后面引入的x不显著是,将其剔除.以确保每次引入新的解释变量之前方程种植包含显著变量. 4.补救措施:①剔除变量法②增大样本容量③变换模型形式:自相关④利用非样本先验信息⑤截面数据与时序数据并用:异方差⑥变量变换 第五章:1.异方差产生原因:①模型中省略了某些重要的解释变量②模型设定误差③数据测量误差④截面数据中总体各单位的差异 2.后果:A参数估计统计特性:参数估计的无偏性仍然成立;参数估计方差不再是最小B参数显著性检验:t统计量进行参数检验失去意义C预测影响:将无效 3检验:A图示①相关图形分析data x y,看散点图,quick→graph→x,y→OK→scatter diagram→
计量经济学复习要点 第1章 绪论 数据类型:截面、时间序列、面板 用数据度量因果效应,其他条件不变的概念 习题:C1、C2 第2章 简单线性回归 回归分析的基本概念,常用术语 现代意义的回归是一个被解释变量对若干个解释变量依存关系的研究,回归的实质是由固定的解释变量去估计被解释变量的平均值。 简单线性回归模型是只有一个解释变量的线性回归模型。 回归中的四个重要概念 1. 总体回归模型(Population Regression Model ,PRM) t t t u x y ++=10ββ--代表了总体变量间的真实关系。 2. 总体回归函数(Population Regression Function ,PRF ) t t x y E 10)(ββ+=--代表了总体变量间的依存规律。 3. 样本回归函数(Sample Regression Function ,SRF ) t t t e x y ++=10??ββ--代表了样本显示的变量关系。 4. 样本回归模型(Sample Regression Model ,SRM ) t t x y 10???ββ+=---代表了样本显示的变量依存规律。 总体回归模型与样本回归模型的主要区别是:①描述的对象不同。总体回归模型描述总体 中变量y 与x 的相互关系,而样本回归模型描述所关的样本中变量y 与x 的相互关系。②建立模型的依据不同。总体回归模型是依据总体全部观测资料建立的,样本回归模型是依据样本观测资料建立的。③模型性质不同。总体回归模型不是随机模型,而样本回归模型是一个随机模型,它随样本的改变而改变。 总体回归模型与样本回归模型的联系是:样本回归模型是总体回归模型的一个估计式,之所以建立样本回归模型,目的是用来估计总体回归模型。 线性回归的含义 线性:被解释变量是关于参数的线性函数(可以不是解释变量的线性函数) 线性回归模型的基本假设 简单线性回归的基本假定:对模型和变量的假定、对随机扰动项u 的假定(零均值假定、同方差假定、无自相关假定、随机扰动与解释变量不相关假定、正态性假定) 普通最小二乘法(原理、推导) 最小二乘法估计参数的原则是以“残差平方和最小”。
现代控制理论基础考试题 西北工业大学考试题(A卷) (考试时间120分钟) 学院:专业:姓名:学号: ) 一.填空题(共27分,每空分) 1.现代控制理论基础的系统分析包括___________和___________。 2._______是系统松弛时,输出量、输入量的拉普拉斯变换之比。 3.线性定常系统齐次状态方程是指系统___________时的状态方程。 4.推导离散化系统方程时在被控对象上串接一个开关,该开关以T为周期进 行开和关。这个开关称为_______。 5.离散系统的能______和能______是有条件的等价。 6.在所有可能的实现中,维数最小的实现称为最小实现,也称为__________。 7.构造一个与系统状态x有关的标量函数V(x, t)来表征系统的广义能量, V(x, t)称为___________。8." 9.单输入-单输出线性定常系统,其BIBO稳定的充要条件是传递函数的所有 极点具有______。 10.控制系统的综合目的在于通过系统的综合保证系统稳定,有满意的 _________、_________和较强的_________。 11.所谓系统镇定问题就是一个李亚普诺夫意义下非渐近稳定的系统通过引入_______,以实现系统在李亚普诺夫意义下渐近稳定的问题。 12.实际的物理系统中,控制向量总是受到限制的,只能在r维控制空间中某一个控制域内取值,这个控制域称为_______。 13._________和_________是两个相并行的求解最优控制问题的重要方法。二.判断题(共20分,每空2分) 1.一个系统,状态变量的数目和选取都是惟一的。(×) 2.传递函数矩阵的描述与状态变量选择无关。(√) 3.状态方程是矩阵代数方程,输出方程是矩阵微分方程。(×) 4.对于任意的初始状态) ( t x和输入向量)(t u,系统状态方程的解存在并且惟一。(√) 5.( 6.传递函数矩阵也能描述系统方程中能控不能观测部分的特性。(×) 7.BIBO 稳定的系统是平衡状态渐近稳定。(×)
6-1 对线性系统 A B C D =+?? =+? x x u y x u 作状态反馈v x u +-=K ,试推导出闭环系统的状态空间模型和传递函数。 解 将反馈律代入状态空间模型,则有 ()()()()A B K A BK B C D K C DK D =+-+=-+=+-+=-+x x x v x v y x x v x v 因此,闭环系统的状态空间模型和传递函数分别为 1()()()()()K A BK B C DK D G s C DK sI A BK B D -=-+?? =-+?=--++x x v y x v 6-2 对线性系统 A B C D =+?? =+? x x u y x u 作输出反馈u =-H y +v ,试推导出闭环系统的状态空间模型和传递函数。 解 将反馈律代入状态空间模型的输出方程,则有 () C D H C DH D =+-+=-+y x y v x y v 即 ()I DH C D +=+y x v 因此,当()I DH +可逆时,闭环系统输出方程为 11()()I DH C I DH D --=+++y x v 将反馈律和上述输出方程代入状态方程,则有 11() [()][()]A B A B H A BH I DH C BH I DH D B --=+=+-+=-++++x x u x y v x v 当闭环系统的状态空间模型和传递函数分别为 1111 11111[()][()]()()()()[()][()]()H A BH I DH C BH I DH D B I DH C I DH D G s I DH C sI A BH I DH C BH I DH D B I DH D ---------?=-++++?=+++?=+-++++++x x v y x v
西北工业大学考试试题(卷)2008 -2009 学年第2 学期
2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+- +-+- ++-+=??????-+++=-??? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 11 2222}){()(22112 21221112112 213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=????? ?+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(02222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ 第三题(15分,答案不唯一,这里仅给出可控标准型的结果) (1) 系统动态方程(3分) []x y u x x 0010 1003201 00010=???? ??????+??????????--=&
计量经济学是经济科学领域内的一门应用科学,以一定的经济理论和实际统计资料为基础,运用数学、统计方法与计算机技术,以建立经济计量模型为主要手段,定量分析研究具有随机特性的经济变量关系。 2、数理经济模型与计量经济模型的区别。 数理:揭示经济活动中各个因素之间的理论关系,用确定性的数学方程加以描述。 计量:揭示经济活动中各个因素之间的定量关系,用随机性的数学方程加以描述。 3、经典计量经济学模型的一般形式。 4、计量经济学的数据类型。 时间序列数据:按时间先后排列的统计数据。 截面数据:一个或多个变量在某一时点上的数据集合。 合并数据(平行数据):既包含时间序列数据又有截面 数据。 5、建立计量经济学模型的步骤。 1) 模型的数学形式。③拟定模型中待估计参数的理论期望 值。 2)样本数据的收集: 差项产生序列相关。②截面数据易引起模型随机误差项 产生异方差。③样本数据的质量:完整性、准确性、可 比性、一致性。 3)模型参数的估计。 4 度检验、变量的显着性检验、方程的显着性检验。③计 量经济学检验:序列相关、异方差法(随机误差项)、 多重共线性(解释变量)④模型预测检验。 6、计量经济学模型的应用。 1)结构分析;2)经济预测;3)政策评价;4)检验与发展经济理论。 7、如何正确选择解释变量。 作为“变量”的原因:1 2)考虑数据的可得性;3)考虑入选变量之间的关系。 8、回归分析的目的。 1)根据自变量的取值,估计应变量的均值;2)检验建立在经济理论基础上的假设;3) 值,预测应变量的均值。 9、总体回归函数(PRF)和样本回归函数(SRF)各变量系数名称及函数方程。 10、随机误差项(Ui)的性质或主要内容。
现代控制理论试题 一、名词解释(15分) 1、能控性 2、能观性 3、系统的最小实现 4、渐近稳定性 二、简答题(15分) 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系统的那些性 质? 2、如何判断线性定常系统的能控性?如何判断线性定常系统的能观性? 3、传递函数矩阵错误!未找到引用源。的最小实现A、B、C和D的充要条件是什么? 4、对于线性定常系统能够任意配置极点的充要条件是什么? 5、线性定常连续系统状态观测器的存在条件是什么? 三、计算题(70分) 1、RC无源网络如图1所示,试列写出其状态方程和输出方程。其中,错误!未找到引用源。为系统的输入,选错误!未找到引用源。两端的电压为状态变量错误!未找到引用源。,错误!未找到引用源。两端的电压为状态变量错误!未找到引用源。,电压错误!未找到引用源。为为系统的输出y。 图1:RC无源网络 2、计算下列状态空间描述的传递函数g(s) 3、求出下列连续时间线性是不变系统的时间离散化状态方程: 其中,采样周期为T=2. 4、求取下列各连续时间线性时不变系统的状态变量解错误!未找到引用源。和错误! 未找到引用源。
5、确定是下列连续时间线性时不变系统联合完全能控和完全能观测得待定参数a的 取值范围: 6、对下列连续时间非线性时不变系统,判断原点平衡状态即错误!未找到引用源。是 否为大范围渐近稳定: 7、给定一个单输入单输出连续时间线性时不变系统的传递函数为 试确定一个状态反馈矩阵K,使闭环极点配置为错误!未找到引用源。,错误!未找到引用源。和错误!未找到引用源。。
现代控制理论试题答案 一、概念题 1、何为系统的能控性和能观性? 答:(1)对于线性定常连续系统,若存在一分段连续控制向量u(t),能在有限时间区间[t0,t1]内将系统从初始状态x(t0)转移到任意终端状态x(t1),那么就称此状态是能控的。 (2)对于线性定常系统,在任意给定的输入u(t)下,能够根据输出量y(t)在有限时间区间[t0,t1]内的测量值,唯一地确定系统在t0时刻的初始状态x(t0 ),就称系统在t0时刻是能观测的。若在任意初始时刻系统都能观测,则称系统是状态完全能观测的,简称能观测的。 2、何为系统的最小实现? 答:由传递函数矩阵或相应的脉冲响应来建立系统的状态空间表达式的工作,称为实现问题。在所有可能的实现中,维数最小的实现称为最小实现。 3、何为系统的渐近稳定性? 答:若错误!未找到引用源。在时刻错误!未找到引用源。为李雅普若夫意义下的稳定,且存在不依赖于错误!未找到引用源。的实数错误!未找到引用源。和任意给定的初始状态错误!未找到引用源。,使得错误!未找到引用源。时,有错误!未找到引用源。,则称错误!未找到引用源。为李雅普若夫意义下的渐近稳定 二、简答题 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系统的那些性 质? 答:系统做线性变换后,不改变系统的能控性、能观性,系统特征值不变、传递函数不变 2、如何判断线性定常系统的能控性?如何判断线性定常系统的能观性? 答:方法1:对n维线性定常连续系统,则系统的状态完全能控性的充分必要条件为:错误!未找到引用源。。 方法2:如果线性定常系统的系统矩阵A具有互不相同的特征值,则系统能控的充要条件是,系统经线性非奇异变换后A阵变换成对角标准形,且错误!未找到引用源。不包含元素全为0的行 线性定常连续系统状态完全能观测的充分必要条件是能观性矩阵错误!未找到引用源。满秩。即:错误!未找到引用源。 3、传递函数矩阵错误!未找到引用源。的最小实现A、B、C和D的充要条件是什么?
第六次课小结 一、 Lyapunov 意义下的稳定性问题基本概念 平衡状态的概念 Lyapunov 意义下的稳定性定义(稳定,一致稳定,渐进稳定,一致渐进稳定,大范围渐进稳定等) 纯量函数的正定性,负定性,正半定性,负半定性,不定性 二次型,复二次型(Hermite 型) 二、 Lyapunov 稳定性理论 第一方法 第二方法 三、 线性定常系统的Lyapunov 稳定性分析 应用Lyapunov 方程 Q PA P A H -=+ 来进行判别稳定性 四、 线性定常系统的稳定自由运动的衰减率性能估计 衰减系数,一旦定出min η,则可定出)(x V 随时间t 衰减上界。 计算min η的关系式 五、 离散时间系统的状态运动稳定性及其判据 离散系统的大范围淅近稳定判据,Lyapunov 稳定判据在离散系统中的应用
六、线性多变量系统的综合与设计的基本问题 问题的提法 性能指标的类型 研究的主要内容 七、极点配置问题 问题的提出 可配置条件 极点配置算法
爱克曼公式(Ackermann’s Formula) 考虑由式()给出的系统,重写为 Bu Ax x +=& 假设该被控系统是状态完全能控的,又设期望闭环极点为n s s s μμμ===,,,21Λ。 利用线性状态反馈控制律 Kx u -= 将系统状态方程改写为 x BK A x )(-=& 定义 BK A A -=~ 则所期望的特征方程为 ) ())((~ 11121=++++=---=-=+-* *--*n n n n n a s a s a s s s s A sI BK A sI ΛΛμμμ 由于凯莱-哈密尔顿定理指出A ~ 应满足其自身的特征 方程,所以
计量经济学复习范围 一、回归模型的比较 1.根据模型估计结果观察分析 (1)回归系数的符号与值的大小就是否符合经济理论要求 (2)改变模型形式之后就是否使判定系数的值明显提高 (3)各个解释变量t 检验的显著性 2.根据残差分布观察分析 在方程窗口点击View \ Actual,Fitted,Residual\Tabe(或Graph) (1)残差分布表中,各期残差就是否大都落在σ ?±的虚线框内。 (2)残差分布就是否具有某种规律性,即就是否存在着系统误差。 (3)近期残差的分布情况 二、 判断新的解释变量引入模型就是否合适(遗漏变量检验) 1、基本原理 如果模型逐次增加一个变量, 由于增加一个新的变量,ESS 相对于RSS 的增加,称为这个变量的“增量贡献”或“边际贡献”。 不引入:0H (即引入的变量不显著) ())'','(~)''/(/' k k F k n RSS k ESS ESS F new old new --= 或 )'','(~/)1(/)(''2' 22k k F k n R k R R F NEW OLD NEW ---= 其中,'k 为新引进解释变量的个数,''k 为引进解释变量后的模型中参数个数。 判别增量贡献的准则:如果增加一个变量使2R 变大,即使RSS 不显著地减少,这个变量从边际贡献来瞧,就是值得增加的。 若F>F 或者对应的P 值充分小,拒绝 则认为引入新的解释变量合适;否则,接受则认为引入新的解释变量不合适。 三、伪回归的消除 如果解释变量与被解释变量均虽随时间而呈同趋势变动,如果不包含时间趋势变量而仅仅就是将Y 对X 回归,则结果可能仅仅反映这两个变量的同趋势特征而没有反映它们之间的真实关系,这种回归也称为伪回归。
一.(本题满分10分) 请写出如图所示电路当开关闭合后系统的状态方程和输出方程。其中状态变量的设置如图所示,系统的输出变量为流经电感2L 的电流强度。 【解答】根据基尔霍夫定律得: 1113222332 1L x Rx x u L x Rx x Cx x x ++=?? +=??+=? 改写为1 13111 22 322 312 11111R x x x u L L L R x x x L L x x x C C ? =--+?? ?=-+???=-?? ,输出方程为2y x = 写成矩阵形式为
[]11 111222 2 331231011000110010R L L x x L R x x u L L x x C C x y x x ??? --???????????????? ???????=-+???? ??????? ??????????????? ? ???-?????? ? ? ??? ?? ?=??? ?????? 二.(本题满分10分) 单输入单输出离散时间系统的差分方程为 (2)5(1)3()(1)2()y k y k y k r k r k ++++=++ 回答下列问题: (1)求系统的脉冲传递函数; (2)分析系统的稳定性; (3)取状态变量为1()()x k y k =,21()(1)()x k x k r k =+-,求系统的状态空间表达式; (4)分析系统的状态能观性。 【解答】 (1)在零初始条件下进行z 变换有: ()()253()2()z z Y z z R z ++=+ 系统的脉冲传递函数: 2()2 ()53 Y z z R z z z +=++ (2)系统的特征方程为 2()530D z z z =++= 特征根为1 4.3z =-,20.7z =-,11z >,所以离散系统不稳定。 (3)由1()()x k y k =,21()(1)()x k x k r k =+-,可以得到 21(1)(2)(1)(2)(1)x k x k r k y k r k +=+-+=+-+ 由已知得 (2)(1)2()5(1)3()y k r k r k y k y k +-+=-+-112()5(1)3()r k x k x k =-+- []212()5()()3()r k x k r k x k =-+-123()5()3()x k x k r k =--- 于是有: 212(1)3()5()3()x k x k x k r k +=--- 又因为 12(1)()()x k x k r k +=+ 所以状态空间表达式为
一、一些应该掌握的概念(课都上完以后回顾时候提到的应该知道的一些知识,有可能会出简答题) 1、中心极限定理 2、大数定理 3、正态分布 4、契比雪夫不等式 5、方差,期望 6、协方差及其相关系数, 二、一些基本题型 1、随机变量分布,“离散型100%考,图形不会的补考!”(此为他课上威胁性话语,所以重视程度排在第一位了……不知道是不是真考,《北方工业大学》版本有一个其他的数据的例子,供参考) 例:设对任意x,定义F(x)=P{X≤x}=P{w|X(w)≤x} X 1 2 3 P 1/3 1/3 1/3 求F(x)=P(X≤x)的分布 1)x<1时,F(x)= P(X<1)=0 2)1≤x<2时,F(x)= P(X≤1)=P(X=1)=1/3 3)2≤x<3时,F(x)= P(X≤2) =P(X=1)+ P(X=2)=2/3 4)3≤x时,F(x)= P(X≤3) =P(X=1)+P(X=2)+ P(X=3)=1 图形:次图形为右连续 F(x) 0 1 2 3 x 2、需求量,很容易考(原话) P15的例1.5,实在打不出来,留个地,大家自己写上去吧。 3、联合概率密度(简单被积分数,身高、体重作为随机变量) 例:用X表示身高,Y表示体重,(X,Y)为二维随机变量 定义F(l,w)=P{X≤l1, Y≤w1} 当两个事件相互独立时,得出
F(l,w)=F X(l) * F Y(w) 即同时满足身高、体重条件的概率为满足身高事件的概率与满足体重的概率乘积。 4、古典概型例子 例一:有藏品100个,其中5个次品,求取8个里面最多2个次品的概率?解:书上p6,例1.1 其中应注意公式: n! C m n =---------------------- m!(n-m)! (公式打得难看了一点,但是很有用) 例二:黑球a个,白球b个,放在一起抓阄。1≤k≤a+b,求在第k个位置抓到黑球的概率? 解: a*(a+b-1)! / (a+b)! =a/(a+b) 此用来证明第k次抽签时与前面抽到的概率都相等,(本人认为考的可能性小,哈哈) 例三:n个人坐一圈,求其中2个熟人坐一起的概率 解: P=2/(n-1) 即为,把两个人看作一个整体,与其他n-1个人排列,有n-1种方法,他们之间的座位左右更换,有两个,所以得出上式。太简单了,估计不会考吧? 例四:n个人,至少2个人同生日的概率 如p6,例1.2 P=1 - 365*364*…(365-n+1)/365n 例五:n双不同的鞋,取2k只,(2k 西北工业大学考试试题(卷) 2008 -2009 学年第2 学期 ? 2? 设系统的传递函数为 [y b =21x x kx =-- · @ } 2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+-+-+- ++-+=??????-+++=-? ?? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 11 2222}){()(22112 2 1221112112213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=????? ?+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(02222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ * 1.经济变量:经济变量是用来描述经济因素数量水平的指标。(3分) 2.解释变量:是用来解释作为研究对象的变量(即因变量)为什么变动、如何变动的变量。(2分)它对因变量的变动做出解释,表现为方程所描述的因果关系中的“因”。(1分)3.被解释变量:是作为研究对象的变量。(1分)它的变动是由解释变量做出解释的,表现为方程所描述的因果关系的果。(2分) 4.内生变量:是由模型系统内部因素所决定的变量,(2分)表现为具有一定概率分布的随机变量,是模型求解的结果。(1分) 5.外生变量:是由模型系统之外的因素决定的变量,表现为非随机变量。(2分)它影响模型中的内生变量,其数值在模型求解之前就已经确定。(1分) 6.滞后变量:是滞后内生变量和滞后外生变量的合称,(1分)前期的内生变量称为滞后内生变量;(1分)前期的外生变量称为滞后外生变量。(1分) 7.前定变量:通常将外生变量和滞后变量合称为前定变量,(1分)即是在模型求解以前已经确定或需要确定的变量。(2分) 8.控制变量:在计量经济模型中人为设置的反映政策要求、决策者意愿、经济系统运行条件和状态等方面的变量,(2分)它一般属于外生变量。(1分) 9.计量经济模型:为了研究分析某个系统中经济变量之间的数量关系而采用的随机代数模型,(2分)是以数学形式对客观经济现象所作的描述和概括。(1分) 10.函数关系:如果一个变量y的取值可以通过另一个变量或另一组变量以某种形式惟一地、精确地确定,则y与这个变量或这组变量之间的关系就是函数关系。(3分) 11.相关关系:如果一个变量y的取值受另一个变量或另一组变量的影响,但并不由它们惟一确定,则y与这个变量或这组变量之间的关系就是相关关系。(3分) 12.最小二乘法:用使估计的剩余平方和最小的原则确定样本回归函数的方法,称为最小二乘法。(3分) 13.高斯-马尔可夫定理:在古典假定条件下,OLS估计量是模型参数的最佳线性无偏估计量,这一结论即是高斯-马尔可夫定理。(3分) 14.总变差(总离差平方和):在回归模型中,被解释变量的观测值与其均值的离差平方和。(3分) 15.回归变差(回归平方和):在回归模型中,因变量的估计值与其均值的离差平方和,(2分)也就是由解释变量解释的变差。(1分) 16.剩余变差(残差平方和):在回归模型中,因变量的观测值与估计值之差的平方和,(2分)是不能由解释变量所解释的部分变差。(1分) 17.估计标准误差:在回归模型中,随机误差项方差的估计量的平方根。(3分) 18.样本决定系数:回归平方和在总变差中所占的比重。(3分) 19.点预测:给定自变量的某一个值时,利用样本回归方程求出相应的样本拟合值,以此作为因变量实际值和其均值的估计值。(3分) 20.拟合优度:样本回归直线与样本观测数据之间的拟合程度。(3分) 21.残差:样本回归方程的拟合值与观测值的误差称为回归残差。(3分) 22.显著性检验:利用样本结果,来证实一个虚拟假设的真伪的一种检验程序。(3分)23.回归变差:简称ESS,表示由回归直线(即解释变量)所解释的部分(2分),表示x对y的线性影响(1分)。 24.剩余变差:简称RSS,是未被回归直线解释的部分(2分),是由解释变量以外的因素造成的影响(1分)。 25.多重决定系数:在多元线性回归模型中,回归平方和与总离差平方和的比值(1分), 现代控制理论试题B 卷及答案 一、1 系统[]210,01021x x u y x ? ??? =+=????-???? 能控的状态变量个数是cvcvx ,能观测的状态变量个数是。 2试从高阶微分方程385y y y u ++= 求得系统的状态方程和输出方程(4分/个) 解 1. 能控的状态变量个数是2,能观测的状态变量个数是1。状态变量个数是2。…..(4分) 2.选取状态变量1x y =,2x y = ,3x y = ,可得 …..….…….(1分) 12233131 835x x x x x x x u y x ===--+= …..….…….(1分) 写成 010*********x x u ???? ????=+????????--???? …..….…….(1分) []100y x = …..….…….(1分) 二、1给出线性定常系统(1)()(),()()x k Ax k Bu k y k Cx k +=+=能控的定义。 (3分) 2已知系统[]210 020,011003x x y x ?? ??==?? ??-?? ,判定该系统是否完 全能观?(5分) 解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++- ,时系统从第 k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于 0的有限数,那么就称此系统在第k 步上是能控的。若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。…..….…….(3分) 2. [][]320300020012 110-=?? ?? ? ?????-=CA ………..……….(1分) [][]940300020012 3202=?? ?? ? ?????--=CA ……..……….(1分) ???? ? ?????-=??????????=940320110 2CA CA C U O ………………..……….(1分) rank 2O U n =<,所以该系统不完全能观……..….……. (2分) 三、已知系统1、2的传递函数分别为 2122211 (),()3232 s s g s g s s s s s -+==++-+ 求两系统串联后系统的最小实现。(8分) 解 112(1)(1)11 ()()()(1)(2)(1)(2)4 s s s s g s g s g s s s s s s -+++== ?=++--- …..….……. (5分) 最小实现为 计量经济学概念题 1.什么是计量经济学?它与经济学、统计学和数学的关系怎样? 计量经济学是一门运用经济理论和统计技术来分析经济数据的科学和艺术,它以经济理论为指导,以客观事实为依据,运用数学、统计学的方法和计算机技术,研究带有随机影响的经济变量之间的数量关系和规律。 计量经济学属于应用经济学,以经济现象为研究对象,其核心内容是建立和应用具有随机特征的计量经济模型。 2.计量经济学三个要素是什么? 经济理论、经济数据和统计方法。 3.计量经济学模型的检验包括哪几个方面?其具体含义是什么? 经济意义检验:主要检验模型参数估计值在经济意义上的合理性,参数估计值的符号、大小以及相互之间的关系是否合乎经济理论 统计学检验:其目的在于检验模型的统计学性质,包括:拟合优度检验、变量显著性检验、总体方程显著性检验 计量经济学检验:由计量经济学理论决定,目的在于检验模型的计量经济学性质。随机误差项的序列自相关检验、随机误差项的异方差检验、解释变量的多重共线性检验等。 模型预测检验:主要是检验模型参数估计值的稳定性及其对样本容量变化时的灵敏程度,确定所建立的模型是否可以用于样本观测值以外的范围,即模型的超样本特性。 4.计量经济学方法与一般经济数学方法有什么区别? 计量经济学方法揭示经济活动中各个因素之间的定量关系,用随机性的数学方程加以描述;一般经济数学方法揭示经济活动中各个因素之间的理论关系,用确定性的数学方程加以描述。 5.计量经济学模型研究的经济关系有那两个基本特征? 计量经济学模型研究的经济关系有两个基本特征:一是随机关系;二是因果关系。 6.计量经济学研究的对象和核心内容是什么? 计量经济学的研究对象是经济现象,是研究经济现象中的具体数量规律(或者说,计量经济学是利用数学方法,根据统计测定的经济数据,对反映经济现象本质的经济数量关系进行研究)。计量经济学的内容大致包括两个方面:一是方法论,即计量经济学方法或理论计量经济学;二是应用,即应用计量经济学;无论是理论计量经济学还是应用计量经济学,都包括理论、方法和数据三种要素。 7.计量经济学中应用的数据类型怎样?举例解释其中三种数据类型的结构。 时间序列数据是按时间周期(即按固定的时间间隔)收集的数据,如年度或季度的国民生产总值。模型中的随机误差项可能存在序列自相关。 横截面数据是在同一时点收集的不同个体(如个人、公司、国家等)的数据。世界各国某年国民生产总值。模型中的随机误差项可能存在异方差。 兼有时间序列和横截面成分的数据称为混合数据(pooled data),如1985-2010世界各国GDP数据。 面板数据(panel data)是混合数据的一种特殊类型,指对相同的一批横截面单元(如家庭或厂家)在时间轴上进行跟踪调查的数据,如我国统计部门定期进行的城、乡居民收入和消费调查数据。 第一章:绪论 1.计量经济学的学科属性、计量经济学与经济学、数学、统计学的关系; 2.计量经济研究的四个基本步骤 (1)建立模型(依据经济理论建立模型,通过模型识别、格兰杰因果关系检验、协整关系检验建立模型); (2)估计模型参数(满足基本假设采用最小二乘法,否则采用其他方法:加权最小二乘估计、模型变换、广义差分法等); (3)模型检验:经济意义检验(普通模型、双对数模型、半对数模型中的经济意义解释,见例1、例2),统计检验(T 检验,拟合优度检验、F 检验,联合检验等);计量经济学检验(异方差、自相关、多重共线性、在时间序列模型中残差的白噪声检验等); (4)模型应用。 例1:在模型中,y 某类商品的消费支出,x 收入,P 商品价格,试对模型进行经济意义检验,并解释21,ββ的经济学含义。 t t t P x y 31.0ln 25.0213.0ln -+=∧, 其中参数21,ββ都可以通过显著性检验。 经济意义检验可以通过(商品需求与收入正相关、与商品价格负相关)。 商品消费支出关于收入的弹性为0.25()/ln(25.0)/ln(11-∧ -=t t t t x x y y ); 价格增加一个单位,商品消费需求将减少31%。 例2:研究金融发展与贫富差距的关系,认为金融发展先使贫富差距加大(恶化),尔后会使贫富差距降低(好转),成为倒U 型。 贫富差距用GINI 系数表示,金融发展用(贷款余额/存款总额)表示。回归结果 为: 229.164.034.2t t t x x GINI -+=∧, 模型参数都可以通过显著性检验。 在x 的有意义的变化范围内,GINI 系数的值总是大于1,细致分析后模型变的毫无意义; 同样的模型还有:GINI 系数的值总是为负 231.1412.734.13t t t x x GINI -+-=∧。 3.计量经济学中的一些基本概念 数据的三种类型:横截面数据、时间序列数据、面板数据; 线性模型的概念;模型的解释变量与被解释变量,被解释变量为随机变量(如 果一个变量为随机变量,并与随机扰动项相关,这个变量称为内生变量),被解释变量为内生变量,有些解释变量也为内生变量。 第二章:回归模型 1.两个变量的相关关系,相关关系与随机因果关系的区别; 2.总体回归函数与线性总体回归函数; 3.一元与多元线性回归模型,回归模型的基本假设; 4.最小二乘估计的基本原理与最小二乘估计量的具体表达式,随机扰动项的方差的估计方法; 5.最小二乘估计的数值性质与最小二乘估计的统计性质,样本容量变化对统计性质的影响; 6.在回归模型中(包括对数模型)计量单位变化对模型参数估计的影响(例3); 7.样本回归直线及其性质;现代控制理论考试卷及答案
(完整版)计量经济学知识点(超全版)
现代控制理论试题(详细答案)
计量经济学概念题
(完整word版)《计量经济学》各章主要知识点
相关主题
文本预览