
AMESim与ADAMS联合仿真操作说明
1.引言
AMESim(Advanced Modeling Environment for Simulation of engineering systems)软件是由法国IMAGINE公司于1995年推出的多学科复杂领域系统工程高级建模和仿真平台,该软件不要求用户具备完备的仿真专业知识,采用面向系统原理图建模的方法,便于工程技术人员掌握和使用。机构动力学分析软件ADAMS (automatic dynamic of mechanical system)集建模、求解和可视化技术于一体,能有效分析和比较多种参数方案。运用AMESim与ADAMS的联合仿真,可以有效的对设备的动态过程进行分析,根据交互分析产生的结果来评价设备的性能,为了更加真实的符合实际情况,理论分析用来完成检验产生的数值结果。这种虚拟产品开发方法与得出的结论将对设计人员提供一定帮助。
通过AMESim/ADAMS之间的接口,有两种方式实现联合仿真:
(1)将模型从一个平台中输入到另一个平台中,采用单一的积分器进行计算。 (2)各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。
2.软件环境要求
首先AMESim软件需要4.2级以上版本;ADAMS需要2003级以上版本(含A/Control模块)。其次必须要有Microsoft Visual C++ 编译器。 如果需要从ADAMS环境中使用接口,那么还强烈推荐Fortran编译器, 这样可以将AMESim 的模型编译成为ADAMS的子函数(Subroutine)。该接口支持的操作系统包括Windows、Sun、SGI和IBM。
3.AMESim与ADAMS接口操作
要成功使用接口, 必须在Windows中设置环境变量%AME_ADAMS_HOME%, 该环境变量的值为ADAMS的安装路径(例如C :\ADAMS2003。注意在ADAMS的安装路径中不能出现空格)。 如果需要从ADAMS环境中使用接口,那么还需要将dfvars.bat文件拷贝至AMESim的安装路径下。
3.1.在ADAMS中设置用于输入到AMESim的模型
在这种情况下,AMESim是主控软件,用户需要在AMESim中运行并控制ADAMS的仿真进程。从ADAMS输出到AMESim有两种方式:
1.共同仿真模式,AMESim通知ADAMS在给定的时间间隔提供它的输出。由ADAMS 自己来求解它的模型。
2.连续模式,AMESim从ADAMS输入完整的系统模型并将所有的方程集成起来在AMESim中求解,此时ADAMS只起到函数评估器的作用。
不管上述哪种模式,在ADAMS中的设置过程是一样的。 用户只需要在AMESim中选择是共同仿真方式或是连续模式输出方式。
3.1.1:创建/检查需要交换的变量。
在这个步骤中,用户需要检查一些状态变量的定义,使用这些状态变量作为两个软件间的交换变量。例如, 如果用在AMESim建立的液压作动器模型来驱动ADAMS中建立的机构模型, 那么这些变量就应该是力、位移以及速度等。事实上, AMESim需要根据位移和速度计算得到力。
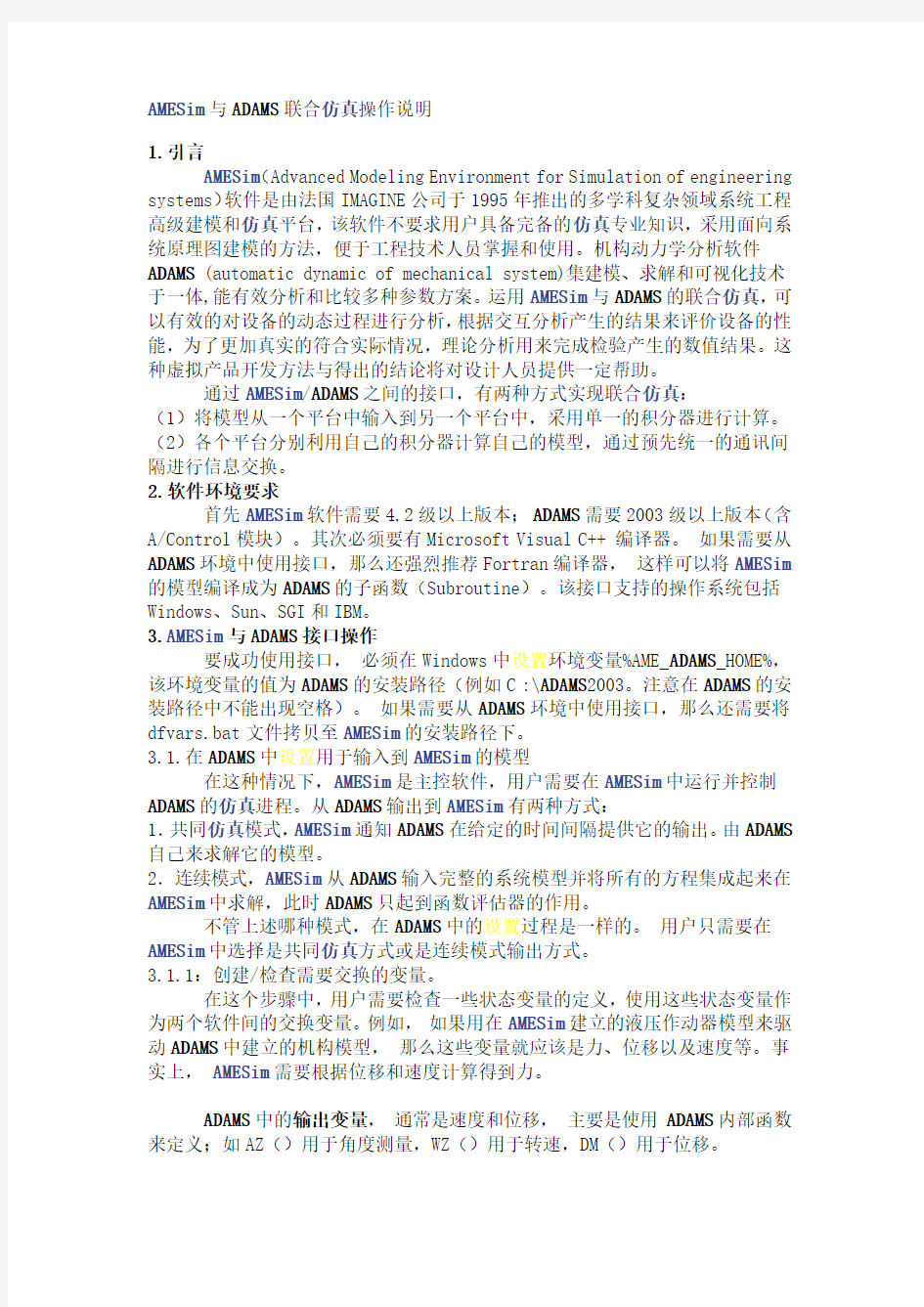
ADAMS中的输出变量, 通常是速度和位移, 主要是使用ADAMS内部函数来定义;如AZ()用于角度测量,WZ()用于转速,DM()用于位移。
图1 ADAMS中创建输出
注意变量的单位。 也就是说需要注意ADAMS中变量的单位和AMESim中的单位之间是否一致, 如果不一致而用户又不希望分别在AMESim和ADAMS中修改单位, 那么可以在AMESim的模型中加入信号控制库中的增益模块来实现单位的协调。
ADAMS的输入变量,通常是力或者扭矩, 以标准的单元使用, 比如单个单元力/扭矩或者通用力(6个元件)。在创建时, 这些变量设置为0,因为它们的值是由其它软件(AMESim)计算得到。
在本例中, 唯一的输入变量是扭矩, 采用函数VARVAL来定义。
在ADAMS/View中,点击菜单Tools/Database Navigator…来定义azimuth_zctuator单元。点击菜单Build/System Elements/State
Variables/Modify…来定义状态变量control_torque。
图2 ADAMS中创建输入
当用户完成创建输入、输出变量后,下一步需要在ADAMS中定义接口了。
3.1.2:定义接口
利用上一步创建的变量,使用现存的Plant Input和Plant Output建立接口模型。
Plant Input:{control_torque}, 其中扭矩以单一单元扭矩使用, 即VARVAL(control_touque)。
Plant Output : {rotor_velocity, azimuth_position}, 这些变量由ADAMS的
函数计算得到。
如下图所示, 用户可以通过Tools菜单中的Database Navigator来设置。
图3 在ADAMS中建立接口模型 至此,ADAMS的模型就全部设置好了。
3.1.3:输出系统模型
用户将通过“Controls”菜单输出系统模型, 如下图所示。
图4 从ADAMS中输出系统模型
在上面的对话框中,用户需要填入以下内容:
?ADAMS中用于存储结果的文件名(File prefix);
? 在第二步中创建的“plant input”和“plant output”;
? 在控制包(Control package)中选择“EASY5_和_MATRIXx”;
? 输出类型,选择线性还是非线性;
? 如果用户希望让ADAMS在运行系统前计算初始稳态分析的话,则需要选择“yes”反之选“no”;
? 如果需要的话,填入用户定义的库名字。
?
经过上述的步骤后,ADAMS将在用户的当前的工作路径中创建了3个文件:
adams2amesim.inf…adm和…cmd。用户只需要注意adams2amesim.inf即
可。在此简单介绍一下这三个文件:
inf文件包括接口软件的基本信息:ADAMS的路径,ADAMS写入的文件名,求解器需要的信息,交换变量的定义,状态变量的数量。
adm文件包括ADAMS求解器进行仿真运算时需要读取的ADAMS系统的信息。
cmd文件包括所有AMDAMS/View需要的相关系统的信息。
到此为止, 在ADAMS软件中的操作部分就完成了。
3.2 在AMESim中输入模型
用户已经在ADAMS中定义并生成了接口使用所需要的文
件:.inf, .adm以及.cmd文件。然后将在AMESim中建立的相关部分的模型保存到上述三个文件所在的目录中。 本例中, AMESim的模型如下图所示:
图5 在AMESim中建立的模型
3.2.1:打开AMESim中的Interface菜单,选择Import Adams model,如下图所示。
图6 在AMESim 中导入模型
在随后打开的对话框中选择在ADAMS中生成的.inf文件, 然后可以出现下列窗口:
图7 AMESim中的对话框
在左边的窗口中,AMESim将会自动将在ADAMS中定义的输入输出变量填入到相关的空格中。用户可以检查变量的名字并为该接口命名。在右边的窗口中各项的含义如下:
?Output prefix name : 是ADAMS输出文件的名字;
?User executable : 必要时可以在此加入ADAMS模型中需要的用户自定义应用库的路径, 它通常包括一些子函数。
?Simulation mode:Continuous代表将ADAMS的模型全部输入到AMESim 中进行仿真, Discrete代表共仿真。
?Animation mode : Interactive代表在仿真的同时,运行A/View进行动画处理。Batch代表在仿真的时候不运行A/View, 而是仿真结束后根据
需要,用户自己运行A/View进行动画处理。
?Output step size : 给出ADAMS写入结果文件时的时间间隔。
最后三项可以选择缺省设置。
3.2.2:从AMESim的Sketch模式进入AMESim的Parameter模式后,点击接口方块, 进入Co-simulation接口方块参数设置。 根据用户选择的接口方式不一样,需要设置的参数稍微有所区别。 如果用户选择的是共仿真方式,那么需要设置的参数如下图所示:
图8 AMESim共仿真模式参数设置
其中值得注意的是communication interval, 该参数的含义是共仿真时AMESim和ADAMS的通讯步长。
如果用户选择的是连续输出方式, 那么需要设置的参数如下图所示:
图9 AMESim连续模式参数设置图
3.2.3:进入AMESim的Run模式,运行AMESim的仿真。如果用户选择的是共仿真方式, 那么此时AMESim会启动A/Solver, 两个软件同时计算。
3.3.在两个软件中分析仿真结果
仿真的结果可以在AMESim与ADAMS中均可以访问。 在AMESim中, 点击接口模块, 用户可以获得下列仿真结果:
图10 AMESim中的仿真结果
在ADAMS中,用户可以将仿真结果加载到模型中。打开ADAMS的File菜单, 选择Import后选择ADAMS/Solver Analysis(req, gra, res),选择在联合仿真时创建的三个文件中的一个并将输入相关联的模型名字, 然后用户可以在ADAMS中进行动画演示以及通过A/Postprocessor来绘制相关变量的曲线,如下图所示:
图11 ADAMS中的仿真结果 4.结论:
同时利用了AMESim和ADAMS的最佳功能,发挥了各个软件平台的优势分别建立各个子系统的模型并通过模型输出或者共仿真来实现联合仿真。避免在不同平台之间重新建立模型,大大提高了建模过程中不同工作组之间的通讯和连续性。采用AMESim和ADAMS之间的接口,可以容易的利用两个软件高效便捷的进行联合仿真。
本教程主要解决AMEsim R13联合仿真过程中SimuCosim生成失败问题。 VS2010(C:\Program Files (x86)\Microsoft Visual Studio 10.0) AMEsimR13(C:\AMESim) 注:先安装VS。
编辑还是新建记不清了,有就编辑,没有就新建。 用户变量(注,根据自己软件的安装路径对应修改) PACH C:\Program Files (x86)\Microsoft Visual Studio 10.0\Common7\Tools;C:\Program Files
(x86)\Microsoft Visual Studio 10.0\VC\bin; MSSDK C:\Program Files (x86)\Microsoft Visual Studio 10.0\SDK;C:\Program Files (x86)\Microsoft Visual Studio 10.0\DIA SDK; 系统变量 PACH %AME%;%AME%\win32;%AME%\win64;%AME%\sys\mingw32\bin;%AME%\sys\mpich\mpd\bin ;%AME%\sys\cgns;%AME%\sys\python\win32;%SystemRoot%\system32;%SystemRoot%;%Syste mRoot%\System32\Wbem;%SYSTEMROOT%\System32\WindowsPowerShell\v1.0\; AMEsim设置
参数模式
ADAMS大作业 机构名称:平板式抓取机构 指导老师:贾璐 学号: 姓名:H L 班级:机制一班
目录 1、启动工作环境 (2) 1.1启动ADAMS软件 (2) 2、设置工作环境 (2) 2.1设置工作网格 (2) 2.2设置图标 (3) 2.3调出坐标 (3) 2.4设置单位 (3) 3、建模 (3) 3.1画出平面闭合曲线 (3) 3.1.1平面闭合曲线一的绘制 (3) 3.1.2曲线二的绘制 (4) 3.1.3曲线三的绘制 (5) 3.1.4曲线四的绘制 (5) 3.2拉伸成三维实体 (5) 3.2.1曲线一的拉伸 (6) 3.2.2曲线二的拉伸 (6) 3.2.3曲线三的拉伸 (6) 3.2.4曲线四的拉伸 (6) 3.3孔的绘制 (7) 3.4贯通杆的绘制 (8) 3.5使贯通杆与Part5形成一个整体 (8) 3.6长方体块的绘制与移动 (8) 3.6.1绘制 (8) 3.6.2移动 (9) 3.7连杆的绘制 (10) 4、添加各种副 (11) 4.1添加转动副 (11) 4.2添加固定副 (12) 4.3添加移动副 (12) 5、添加运动及运动函数的编辑 (13) 5.1添加运动 (13) 5.2运动函数的编辑 (13) 6、防真 (14) 7、防真分析 (15) 7.1位移曲线一的生成 (15) 7.2位移曲线二的生成 (16) 7.3角度曲线的生成 (17) 8、视频输出 (18) 9、退出ADAMS (20) 10、感想 (20)
1、启动工作环境 1.1启动ADAMS软件 双击ADAMS图标,命名如图1-1,点击进入ADAMS 工作环境。右击,点击,将背景颜色修改为白色。 图1-1 2、设置工作环境 2.1设置工作网格 点击,选择其中的,将工作网格设置为如图2-1所示,点击完成设置。
1、我们先要确定所使用的电脑上已经安装版本匹配的软件,必要的软件是visual stdio也就是vc++,我使用的vs版本是2010;MatlaB,我使用的是2011b; amesim,我使用的是amesim 12.0版本。PS:这几个版本的匹配情况请参阅LMS那边提供的帮助文档。 2、在默认版本安装成功的情况下,我们来设置一下环境变量: (1)我们要是设置用户变量:1)变量名:MatlaB,值为:D:\Program Files\MATLAB\R2011b,如图所示 2)设置第二个用户变量,变量名:Path,值为:D:\Program Files\MATLAB\R2011b\bin\win64,如图所示 那么,我们默认以上两个用户变量已经设置完毕。 (2)我们设置系统变量,我们找到系统变量的Path变量,点击编辑
这里我建议把系统变量的Path复制出来检查一下几个变量是否已经添加 C:\Program Files\Microsoft HPC Pack 2008 R2\Bin\; %AME%; %AME%\win32; %AME%\win64; %AME%\sys\mingw32\bin; %AME%\sys\mpich\mpd\bin; %AME%\sys\cgns; %AME%\sys\python\win32; C:\Program Files (x86)\Intel\iCLS Client\; C:\Program Files\Intel\iCLS Client\; %SystemRoot%\system32; %SystemRoot%; %SystemRoot%\System32\Wbem; %SYSTEMROOT%\System32\WindowsPowerShell\v1.0\; C:\Program Files\Intel\Intel(R) Management Engine Components\DAL; C:\Program Files\Intel\Intel(R) Management Engine Components\IPT; C:\Program Files (x86)\Intel\Intel(R) Management Engine Components\DAL; C:\Program Files (x86)\Intel\Intel(R) Management Engine Components\IPT; d:\Program Files\MATLAB\R2011b\runtime\win64; d:\Program Files\MATLAB\R2011b\bin; D:\abaqus6134\Commands;D:\Program Files\MATLAB\R2011b\bin\win64; D:\Program Files (x86)\Microsoft Visual Studio 10.0这个可能需要动手自己添加
Amesim 与 matlab 联合仿真参数设置 实验软件平台 Matlab2009a , amesimR8a , VC6.0企业版 步骤: 1 将 VC++中的 "vcvar32.bat" 文件从 Microsoft Visual C++目录(通常 是 .\Microsoft Visual Studio\VC98\Bin中拷贝至 AMESim 目录下。 2 设置环境变量:我的电脑 -〉属性 -〉高级 -〉环境变量。设置 AMESim 环境变量:变量名 AME , 值为其安装路径如安装在 C 盘中则值为 C:\。设置 Matlab 环境变量:变量名MATLAB 值为 D:\MATLAB701。确认在系统变量 PATH 中包含系统安装目录C:\WINNT\System32 3 在 Matlab 的目录列表里加上 AMESim 与 Matlab 接口文件所在的目 录 %AME%\matlab\amesim。 File-〉 Set Path-〉 Add Folder 加上 C:\AMEsim\matlab\amesim。 (注意 amesimR8A 是 将 %AME%\scripting\matlab\amesim设置到 MATLAB 路径中 4 将联合仿真的许可证文件 licnese.dat 拷贝到 AMESim 安装目录下的 licnesing 文件夹中 5 确认是否在 AMESim 中选择 VC 作为编译器。具体操作在AMESim-〉 Opions-> AMESim Preferences->Compilation/Parameters中。 . 在MATLAB 命令窗口中输入命令 Mex -setup , 选择 VC 作为编译器。 如果上面设置成功下面不用看 下面给出 amesim4.0版本设置方法 为了实现二者的联合仿真,需要在 Windows2000或更高级操作系统下安装Visual C++ 6.0,AMESim4.2以上版本与 MATLAB6.1上版本 (含 Simulink
1起重机的建模和仿真,如下图所示。 1)启动ADAMS 1. 运行ADAMS,选择create a new model; 2. modal name 中命名为lift_mecha; 3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok 4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok 5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。 2)建模 1. 查看左下角的坐标系为XY平面 2. 选择setting——icons下的new size图标单位为1
3. 在工具图标中,选择实体建模按钮中的box按钮 4. 设置实体参数; On ground Length :12 Height:4 Depth:8 5. 鼠标点击屏幕上中心坐标处,建立基座部分 6. 继续box建立Mount座架部件,设置参数: New part Length :3 Height:3 Depth: 3.5 设置完毕,在基座右上角建立座架Mount部件 7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:
①右键选择主工具箱中的position按钮图标中的move按钮 ②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置 ③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动 右键选择座架,在快捷菜单中选择rename,命名为Mount 8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心
Amesim与matlab 联合仿真参数设置 实验软件平台 Matlab2009a,amesimR8a ,VC6.0 企业版(英文版) 步骤: 1 将VC++中的"vcvar32.bat" 文件从Microsoft Visual C++目录(通常是.\Microsoft Visual Studio\VC98\Bin 中)拷贝至AMESim 目录下。 2 设置环境变量:我的电脑- 〉属性-〉高级- 〉环境变量。设置AMESim环境变量:变量名AME,值为其安装路径如安装在 C 盘中则值为C:\+amesim 安装路径。设置Matlab 环境变量:变量名MATLAB值为D:\MATLAB,此处我安装的matlab 在D 盘根目录下。确认在系统环境变量PATH 中包含系统安装目录C:\WINDOWS\system32 3 在Matlab 的目录列表里加上AMESim 与Matlab 接口文件所在的目录%AME%\matlab\amesim。File- 〉Set Path- 〉Add Folder 加上需要联合仿真的amesim文件目录和C:\AMEsim\matlab\amesim(注意R8A版本是将%AME%\scripting\matlab\amesim 设置到MATLAB路径中)加入matlab 默认路径中 4 将联合仿真的许可证文件licnese.dat 拷贝到AMESim 安装目录下的licnesing 文件夹中 5 确认是否在AMESim 中选择VC 作为编译器。具体操作
在AMESim-〉Opions-> AMESim Preferences->Compilation/Parameters中。. 在MATLAB命令窗口中输入命令Mex -setup,选择VC 作为编译器 注意点: 1,Vc建议安装企业版而且是英文的,其第一次打开安装文件安装并不完全,重启动以后再次点安装文件,会出现于第一次安装文件不同的界面,就说明没有安装完全 2,Matlab 的安装目录和amesim的安装目录都不能在中文路径下,而去文件夹的名称不能有空格 3,联合仿真设置成功的标志: 可以运行amesim- 〉HELP- 〉GET AMESIM DEMO-〉interface- 〉amesimsimulink 下的范例 4,如果运行的现实找不到matlab bin 则说明系统环境变量中没有设置matlab 路径,设置方法见上面,再重启电脑,再次用amesim打开范例并到参数模式下,运行TOOLS-〉Start matlab,系统会调用matlab 程序,再在打开的matlab 中找到与amesim中打开的文件同目录且同名的.mdl 文件,在matlab 中运行仿真,如果没有错误则在amesim 中进入仿真模式打开相应的元件就可 以看到曲线(注意在amesim中不用运行仿真)
7.1机械夹紧机构建模使用实例 机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(ground Block)等物体。 夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。 夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不大于80N;释放手柄的力应最小;在振动环境中夹紧机构应安全可靠。 手柄Handle 锁钩Hook 图7-1 夹紧机构三维模型图 以下将从创建几何构件、添加约束、添加载荷及结果后处理等几个方面详细介绍机械夹紧机构模型的建立。通过本实例的学习,能够详细了解ADAMS软件设计流程及使用方法。 7.1.1创建几何构件 1、创建新模型 本实例将使用ADAMS/View的零件库、约束库和力库创建夹紧机构模型。 首先打开ADAMS/View,选择“Create a new model”,模型名称(Model Name):Latch,点击OK,创建新模型完毕。其它设置如图7-2所示:
图7-2 创建新模型 2、设置工作环境 选择菜单栏【Settings】→【Units】命令,设置模型物理量单位,如图7-3所示: 图7-3设置模型物理量单位 选择菜单栏【Settings】→【Working Grid】命令,设置工作网格,如图7-4所示:
图7-4设置工作网格 3、创建设计点 设计点是几何构件形状设计和位置定位的参考点。本实例将通过设计点列表编辑器创建几何构件模型所需要的全部设计点。 选择并点击几何模型库(Geometric Modeling)中的点(Point),下拉菜单选择(Add to Ground)、(Don’t Attach),并单击Point Table列表编辑器,创建并生成Point_1、Point_2等六个设计点,如图7-5、图7-6所示: 图7-5设计点列表编辑器
AMESim和ADAMS 依托AMESim7.0与adams2007或2005联合仿真过程,除要用到这两中软件外还要安装完整版的vc++(注意不能要绿色版,要完整破解版)。 设置环境变量: 右键点击我的电脑>属性>高级>环境变量,在administration 用户变量栏下点“新建”,设置:变量名 AME_ADAMS_HOME 变量值填写你安装adams的安装路径(例如:D:\adams2005) 然后确定。在开始>运行栏中打cmd进入dos环境,输入 echo %AME_ADAMS_HOME% 注意echo后有空格,然后回车,显示你的adams安装路径(例如:D:\adams2005)说明正确。 下面总体说一下联合仿真过程,简单的说,是两种软件量与量的交换过程。首先在adams中会建立一个接受AMESim传来的量(f)驱动模型,然后从adams中输出一个模型量(w)传到AMESim。 建立adams模型: 首先建立一个工作文件夹,adams和AMESim的工作目录全部指向它,注意这个文件夹的名字和路径全部为英文不能有其他符号和字符,视频教程中建在c盘根目录下,命名aa。为了说明清楚,在这里仅建立了一个绕固定点旋转的杆件模型,在它和ground直接加入铰接关系,就是那个合页的连接关系,给它加入空间力矩。然后在build下选system elements>stable variable>new建立新的变量f(AMESim 输入扭矩),用同样的方法建立变量w(adam s输出角速度),并且设置w的值,从build下选system elem ents>stable variable>modify选择model中的w,设定f=值,点击三个小点的按钮进入function build,在下拉框中选择velocity,单击anglar velocity about Z,点击assist,在to marker 栏右键单击,选择marker>browse,选择part2 cm(杆中心点),OK,Ok,删掉原有的0,然后确定, 然后选择build>contral toolit>plant input在弹出对话框中,双击variable nam e栏,Database Navigator中选择f,OK;同样在build>contral toolit>plant output的Database Navigator中选择w为输出变量,OK! 将前面设定的扭矩值设定为f,就是在那个fuction窗口中选data element>plant input. 从tool>plung manage>中选择control,调出control,在control下选择plant explorer,在plant input选择pinput1,在plant output选择poutput1,点确定。这时在aa文件夹下会出现三个文件*.inf, *.adm, *.cmd,其中*.inf文件包含了进行联合仿真时AMESim软件所需要的一些基本信息,如工作路径、文件名、输入输出变量的特征、状态变量数。*.cmd, *.adm分别是仿真运行时计算方式为交互式和批处理式所必须的数据文件,包含ADAMS求解器可读的信息,这些信息在运行仿真时,将输入到求解器。
Adams 实例建模仿真 目录 Adams课程论文 (1) 第一章模型的建立 (2) 1、模型的介绍 (2) 2、启动ADAMS (2) 3、栅格设置 (3) 4、创建齿轮 (3) 5、创建连杆 (5) 6、创建滑块 (6) 第二章创建转动副,移动副,齿轮副,驱动力,仿真 (7) 1、创建转动副 (7) 2、创建移动副 (8) 3、创建齿轮副 (9) 4、创建驱动力 (10) 5、仿真 (11) 第三章计算结果后处理 (12) 1、滑块的速度曲线 (12) 2、滑块位移曲线 (12) 3、滑块加速度曲线 (13) 4、齿轮1与齿轮2转角曲线 (13) 5、连杆曲线图 (14) 6、录制动画并导出 (15) 第四章总结 (17)
第一章模型的建立 1、模型的介绍 如图一所示,该模型由齿数z为200,模数m为4,半径400mm的齿轮1,齿数z为100,模数m为4,半径200mm的齿轮2,以及连杆和滑块组成。该模型的运动形式为齿轮1为驱动轮,带动齿轮2转动,齿轮2于连杆偏心连接,带动连杆推动滑块直线反复运动。实质上是将齿轮的转动转化为滑块的平动。 图1-1 模型简图 2、启动ADAMS 2.1 在桌面点击ADAMS快捷键Adams - View x64 2013,或者Windows开始菜单启动:“开始”—“所有程序”—“MSC.Software”—“Adams x64 2013”—“A View”—“Adams-View”。 2.2 启动后出现Welcome欢迎窗口,如图1-1所示,点击New Model,出现Create New Model,Model Name为adams,Gravity为Earth Normal,Units为MMKS。 2.3 单击OK,进入ADAMS。
AMESim与ADAMS联合仿真 1.引言 AMESim(Advanced Modeling Environment for Simulation of engineering systems)软件是由法国IMAGINE公司于1995年推出的多学科复杂领域系统工程高级建模和仿真平台,该软件不要求用户具备完备的仿真专业知识,采用面向系统原理图建模的方法,便于工程技术人员掌握和使用。机构动力学分析软件ADAMS (automatic dynamic of mechanical system)集建模、求解和可视化技术于一体,能有效分析和比较多种参数方案。运用AMESim与ADAMS的联合仿真,可以有效的对设备的动态过程进行分析,根据交互分析产生的结果来评价设备的性能,为了更加真实的符合实际情况,理论分析用来完成检验产生的数值结果。这种虚拟产品开发方法与得出的结论将对设计人员提供一定帮助。 通过AMESim/ADAMS之间的接口,有两种方式实现联合仿真: 1)将模型从一个平台中输入到另一个平台中,采用单一的积分器进行计算。 2)各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。 2.软件环境要求: 首先AMESim软件需要4.2级以上版本; ADAMS需要2003级以上版本(含A/Control模块)。其次必须要有Microsoft Visual C++ 编译器。如果需要从ADAMS环境中使用接口,那么还强烈推荐Fortran编译器,这样可以将AMESim的模型编译成为ADAMS的子函数(Subroutine)。该接口支持的操作系统包括Windows、Sun、SGI和IBM。
AMESim-Matlab 的联合仿真设置 1. 联合仿真的前期准备 1.1. AMESim 与Matlab 的版本匹配问题 AMESim 与Matlab 的联合仿真有两类接口: 接口(将AMESim 模型导入到Simulink 中) 接口(将Simulink 模型导入到AMESim 中) 两种不同的接口,对应的AMESim-Matlab 联合仿真的软件兼容列表,分别如图 1 和 2 所示。图中,"Probable"表示未经AMESim 官方测试,但仍然可以正常使用。"Yes"表示经AMESim 官方测试,确定可以正常使用。"No"表示该组合不能实现联合仿真。 如图 1 所示,"AMESim to Simulink" 接口对软件的版本要求较低,基本上AMESim Rev7(或者更高的版本)与Mablab R2007b (或者更高的版本)可以自由组合进行联合仿真。如果想使用"Simulink to AMESim" 接口,建议安装AMESim Rev11 以上的版本,Malab 只要求R2007b 以上即可。 图 1 "AMESim to Simulink" 接口 图 2 "Simulink to AMESim" 接口
1.2. Microsoft Visual C++编译器(VC++)的版本选择? AMESim 支持的VC++版本分别如图1(32 位编译器),图2(64 位编译器)所示。 图 1 和图 2 中,"Probable","Yes","No"表示的意思同上。经测试,AMESim Rev9 可以正常调用VS2010 版的VC++(32 位)。另外,从图 1 中,可以看到,VC++ 6.0 不能支持AMESim Rev11 以上的版本。建议安装英文版的VC++编译器,便于联合仿真出错时,查看编译信息,寻找问题所在。中文版的VC++编译器,在联合仿真出错时,部分编译信息会显示为乱码。 1.3. AMESim、Matlab、VC++的安装顺序需要注意吗? 建议的安装顺序为:先装VC++,Malab 和AMESim 的安装顺序任意,这样就能省去一些手动操作。AMESim 调用VC++编译器,需要事先将VC++编译器里的文件vcvars32.bat (32 位操作系统)或vcvars64.bat(64 位操作系统)拷贝到AMESim 的安装目录。如果先装VC++,后装AMESim,正常情况下,vcvars32.bat 文件会自动导入到AMESim 安装目录中。
AMESim与ADAMS联合仿真操作说明 1.引言 AMESim(Advanced Modeling Environment for Simulation of engineering systems)软件是由法国IMAGINE公司于1995年推出的多学科复杂领域系统工程高级建模和仿真平台,该软件不要求用户具备完备的仿真专业知识,采用面向系统原理图建模的方法,便于工程技术人员掌握和使用。机构动力学分析软件ADAMS (automatic dynamic of mechanical system)集建模、求解和可视化技术于一体,能有效分析和比较多种参数方案。运用AMESim与ADAMS的联合仿真,可以有效的对设备的动态过程进行分析,根据交互分析产生的结果来评价设备的性能,为了更加真实的符合实际情况,理论分析用来完成检验产生的数值结果。这种虚拟产品开发方法与得出的结论将对设计人员提供一定帮助。 通过AMESim/ADAMS之间的接口,有两种方式实现联合仿真: (1)将模型从一个平台中输入到另一个平台中,采用单一的积分器进行计算。 (2)各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。 2.软件环境要求 首先AMESim软件需要4.2级以上版本;ADAMS需要2003级以上版本(含A/Control模块)。其次必须要有Microsoft Visual C++ 编译器。 如果需要从ADAMS环境中使用接口,那么还强烈推荐Fortran编译器, 这样可以将AMESim 的模型编译成为ADAMS的子函数(Subroutine)。该接口支持的操作系统包括Windows、Sun、SGI和IBM。 3.AMESim与ADAMS接口操作 要成功使用接口, 必须在Windows中设置环境变量%AME_ADAMS_HOME%, 该环境变量的值为ADAMS的安装路径(例如C :\ADAMS2003。注意在ADAMS的安装路径中不能出现空格)。 如果需要从ADAMS环境中使用接口,那么还需要将dfvars.bat文件拷贝至AMESim的安装路径下。 3.1.在ADAMS中设置用于输入到AMESim的模型 在这种情况下,AMESim是主控软件,用户需要在AMESim中运行并控制ADAMS的仿真进程。从ADAMS输出到AMESim有两种方式: 1.共同仿真模式,AMESim通知ADAMS在给定的时间间隔提供它的输出。由ADAMS 自己来求解它的模型。 2.连续模式,AMESim从ADAMS输入完整的系统模型并将所有的方程集成起来在AMESim中求解,此时ADAMS只起到函数评估器的作用。 不管上述哪种模式,在ADAMS中的设置过程是一样的。 用户只需要在AMESim中选择是共同仿真方式或是连续模式输出方式。 3.1.1:创建/检查需要交换的变量。 在这个步骤中,用户需要检查一些状态变量的定义,使用这些状态变量作为两个软件间的交换变量。例如, 如果用在AMESim建立的液压作动器模型来驱动ADAMS中建立的机构模型, 那么这些变量就应该是力、位移以及速度等。事实上, AMESim需要根据位移和速度计算得到力。 ADAMS中的输出变量, 通常是速度和位移, 主要是使用ADAMS内部函数来定义;如AZ()用于角度测量,WZ()用于转速,DM()用于位移。
ADAMS对单摆的建模与仿真分析 姓名: 班级: 学号:
单摆作业: 已知: 摆杆质量M1=0.002kg,小球质量M2=12kg, 摆杆长度 l=40.0cm, g=9.8m/s2 ,初始摆角α=30o, 结束时间(End time): 5.0 , 步长(Steps ):500
一.建立单摆模型 1.设置参数 (1)通过开始程序菜单运行 ADAMS,运行 ADAMS。 (2)选择Create a new model 。 (3)确认Gravity (重力)文本框中是Earth Normal (-Global Y),Units(单位)文本框中是MMKS-mm,kg,N,s,deg,单击OK按钮。 (4)在Setting下拉菜单中选择Working Grid,系统打开参数设置对话框,在Spacing栏,X和Y项都输入10mm 2. 建立摆杆模型 (1)选择View菜单选择Coordinate Windows 命令,打开坐标窗口,以便查看模型尺寸。(2)在主工具箱右键单击Rigid Body 在弹出的级联图标中选择Rigid Body :link工具(3)用鼠标左键单击Rigid Body :link工具,系统打开参数设置对话框,确认在工具箱下方文本框中显示New Part。选中Length 选项,输入40cm,即单摆的长度。选中Width选项,输入2.0cm。选中 Depth选项,输入2.0cm。 (4)单击View中的Coordinate Window键,鼠标单击(0,400,0)作为单摆的左侧起点,然后单击右侧水平方向的任一点,ADAMS自动生成摆臂 3.设置摆臂位置 (1)在工具箱中选择定位图标。 (2)打开参数设置对话框,在Angle栏输入30,此时摆臂高亮显示。 (3)点击2次顺时针箭头,摆臂转向与竖直方向成30度方向。 4.建立球模型 (1)在主工具箱右键单击Rigid Body 在弹出的级联图标中选择Rigid Body :sphere工具(2)用鼠标左键单击Rigid Body:sphere 工具,系统打开参数设置对话框,确认在工具箱下方文本框中显示New Part (3 )单击View中的Coordinate Window键,鼠标单击摆杆右端点作为球的中心点,自动生成一个球 5.设置摆臂和球的质量 (1)鼠标右键单击摆臂Part 2,在打开的右键快捷菜单中选择Modify,弹出修改对话框(2)在Define Mass By栏选择User Input。 (3)在Mass(质量)栏输入0.002kg。 (4)输入完毕单击OK按钮。 (5)根据上面步骤设置球的质量为12kg。 6.建立单摆支点 (1)在工具箱中选择铰接图标。 (2)系统打开参数设置对话框,确认在工具箱下方的Construction文本框中显示1 Location 和Normal To Grid。 (3)鼠标左键依次点击点击摆臂的左端点,ground,摆臂的左端点中心。 (4)在大地和摆臂之间生成一个铰接支点。 7.建立摆杆和球铰接 (1)在工具箱中选择铰接图标。 (2)系统打开参数设置对话框,确认在工具箱下方的Construction文本框中显示2Bod —1Loc和Normal To Grid。 (3)鼠标左键依次点击点击摆臂的左端点,球,摆臂的右端点中心。 (4)在球和摆臂之间生成一个铰接支点。
MATLAB/Simulink interface? Version 4.0 - March 2002 https://www.doczj.com/doc/3b10122201.html, EMail:cadserv21@https://www.doczj.com/doc/3b10122201.html, The document is for study only,if tort to your rights,please inform us,we will delete
Copyright ? IMAGINE S.A. 1995-2002 AMESim? is the registered trademark of IMAGINE S.A. AMESet? is the registered trademark of IMAGINE S.A. ADAMS? is a registered United States trademark of Mechanical Dynamics, Incorporated. ADAMS/Solver? and ADAMS/View? are trademarks of Mechanical Dynamics, Incorpo- rated. MATLAB and SIMULINK are registered trademarks of the Math Works, Inc. Netscape and Netscape Navigator are registered trademarks of Netscape Communications Corporation in the United States and other countries. Netscape’s logos and Netscape product and service names are also trademarks of Netscape Communications Corporation, which may be registered in other countries. PostScript is a trademark of Adobe Systems Inc. UNIX is a registered trademark in the United States and other countries exclusively licensed by X / Open Company Ltd. Windows, Windows NT, Windows 2000 and Windows XP are registered trademarks of the Microsoft Corporation. X windows is a trademark of the Massachusetts Institute of Technology. All other product names are trademarks or registered trademarks of their respective compa- nies. https://www.doczj.com/doc/3b10122201.html, EMail:cadserv21@https://www.doczj.com/doc/3b10122201.html, The document is for study only,if tort to your rights,please inform us,we will delete
ADAMS与AMESim联合仿真 以AMESim作为主软件进行联合仿真。在ADAMS中建立曲柄滑块机构,将建立的模型导入AMESim中,用AMESim中的液压系统驱动曲柄转动,并绘制滑块的位移曲线。在创建模型前通过Settings—Interface Style—Classic将界面切换到经典模式。 1、在Adams中建立曲柄滑块机构,如图示: 2、通过Build—System Elements—New创建变量建立状态变量t,x,其中t代表力,x代表滑块的位移; t作为输入变量,默认为0;x作为输出变量,使用函数DZ(MARKER_12, MARKER_13, MARKER_13),MARKER_12是滑块上的一坐标系,MARKER_13
为ground与滑块建立移动副时产生的ground上的坐标系,其含义是测量MARKER_13到MARKER_12的距离,方向沿MARKER_13的Z轴方向。 3、通过Date Elements—Plant—Plant Input/Plant Output建立输入输出变量,并与状态变量连接起来 4、右击SFORCE_1将力与输入变量连接起来
5、通过Controls—Plant Export将ADAMS模型导出
6、在AMESim中建立液压系统如图示: 通过Modeling—Interface block—Import Adams model,选择工作目录中刚刚生成的inf文件; 完成如下图示的菜单
最终的液压系统如下图示
7、进行联合仿真,注意Print interval的值要小于MSC.Adams output step size 的值 进行联合仿真时如下图示:
高版本AMESim—MATLAB联合仿真设置详细步骤说明:现以AMESimR12、MATLAB2010a为例说明,其他版本类似。 1、版本要求 亮色为可行匹配 2、辅助软件VS 若要使用AMESim 与Simulink 的接口,则需要在本机安装编译器,高版本软件需要高版本的编译器,这里以VS2008为例设置。一般推荐先安装VS编译器,然后安装Matlab,最后安装AMESim的顺序。 若后安装VS编译器,将VS编译器安装目录下如D:\Program Files\Microsoft Visual Studio 9.0\VC\bin目录中的nmake.exe 文件和vcvars32.bat 文件拷贝至AMESim 安装目录,如D:\AMESim\v1200下。
3、环境变量设置 定义Windows 系统环境变量: 1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”; 2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”; 3)用户变量中添加 HOME D:\ MATLAB D:\MATLAB\R2010a Path D:\Program Files\Microsoft Visual Studio 9.0\Common7\Tools;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\MATLAB\R2010a\bin;D:\MATLAB\R2010a\bin\win32 4) 在系统变量中添加 在Path 环境变量中加入(以分号与其它已经存在的变量值隔开)路径:Matlab_Root( 如D:\Matlab\R2010a)\bin 和Matlab_Root( 如D:\Matlab\R2010a)\bin\win32 ,以及%windir%\System32,其中%windir%指的是Windows 的安装路径,如C:\WINNT Path D:\Program Files\Microsoft Visual Studio 9.0;D:\AMESim\v1200;D:\AMESim\v1200\win32;D:\AMESim\v1200\sys\mingw32\bin;D:\AMESi m\v1200\sys\mpich\mpd\bin;D:\AMESim\v1200\sys\cgns;%SystemRoot%\system32;%SystemRo ot%;%SystemRoot%\System32\Wbem;D:\MATLAB\R2010a\bin\win32;C:\WINDOWS\system32;C: \WINNT
AMESim—MATLAB(64位)联合仿真设置详细步骤说明:现以AMESimR12、MATLAB2014b为例说明,其他版本类似。 1、版本要求 2、辅助软件VS2013 若要使用 AMESim 与 Simulink 的接口,则需要在本机安装编译器,高版本软件需要高版本的编译器,这里以VS2013为例设置。一般推荐先安装VS编译器,然后安装 Matlab,最后安装 AMESim的顺序。 若后安装VS编译器,将VS编译器安装目录下如 D:\ Microsoft Visual Studio 12.0 \VC\bin 目录中的nmake.exe 文件和vcvars32.bat 以及D:\Microsoft Visual Studio 12.0\VC\bin\amd64下的vcvars64.bat(64位版本的MATLAB)文件拷贝至 AMESim 安装目录,如D:\AMESim\v1200下。 3、环境变量设置 定义Windows 系统环境变量: 1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”; 2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”; 3)用户变量中添加 HOME D:\ MATLAB D:\MATLAB\R2014b Path D:\ Microsoft Visual Studio 12.0\Common7\Tools; D:\ Microsoft Visual Studio 12.0\VC\bin; D:\Program Files\MATLAB\R2014b\bin; D:\Program Files\MATLAB\R2014b\bin\win64
第一章引言 本章将介绍AMESim 家族产品和AMESim 4.2的新特征。 AMESim是什么? AMESim 怎么用? 如何使用文件组? 在线帮助的组织结构。AMESim 4 软件包。 AMESim 4.2的新特征 1.1 AMESim是什么? AMESim表示工程系统仿真高级建模环境(A dvanced M odeling E nvironment for performing Sim ulations of engineering systems).基于直接图形接口,在整个仿真过程中系统可以显示在环境中。AMESim 使用图标符号代表各种系统的元件,这些图标符号要么是国际标准组织如工程领域的ISO为液压元部件确定的标准符号,或为控制系统确定的方块图符号,或者当不存在这样的标准符号时可以为该系统给出一个容易接受的非标准图形特征。. Figure 1.1: AMESim中使用符号 Figure 1.1 所示为使用标准液压,机械和控制符号表达的一个工程系统。Figure 1.2所示为使用了非标准图形特征的汽车制动系统。 Figure 1.2: 汽车制动系统的符号
1.2 如何使用AMESim? 使用AMESim你可以通过在绘图区添加符号或图标搭建工程系统草图,搭建完草图后,可按如步骤进行系统仿真: ?图标元件的数学描述 ? 设定元件的特征 ? 初始化仿真运行 ? 绘图显示系统运行状况 Figure 1.3 所示为从HCD符号构建的一个三柱塞径向液压泵详细模型。箭头用来表示液流方向。 Figure 1.3: 从HCD符号构建的一个三柱塞径向液压泵
大多数自动化系统都可按上述步骤执行,在每一步都可以看到系统草图。 接口 现在的联系是为了提供软件间的接口使它们能够联合工作,以便你能够获得每个软件的最佳特征。标准AMESim软件包提供了与MATLAB.的接口。这使你有权使用控制器设计,优化工具和功率谱分析等。还有其它一些接口可用,AMESim 最新接口信息请参见1.6.6节接口。 方程 AMESim用方程组来描述工程系统的动态行为,用计算机码作为系统模型来执行。在系统内用方程和计算机码构建各元件的模型。这些用作子模型。AMESim 内有庞大的元部件子模型和图标符号库。 标准库 标准库提供了控制和机械图标,子模型允许你完成大量工程系统的动态仿真。另外,还有一些可选库,如液压元件设计库,液压阻尼,气动,热力学,热力液压,冷却系统,传动系,输油等... 1.3如何使用文件组 文件组由以下组成:The documentation set is made up of: ? 打印和PDF格式的AMESim平台使用手册 ?打印和PDF格式的各种库使用手册 ? HTML 格式的所有子模型的说明书 打印格式文件包含在随同你申请的CD ROM中。