if(!x)
{/*该位为0*/}
else
{/*该位为1*/}
第5章
随机存储器和只读存储器有何区别
随机存储器数据掉电易丢失;随机存储器读写时可以从存储器任意地址处进行。
只读存储器数据掉电不丢失。
请解释 SRAM、 DRAM 和 SDRAM。
SRAM(Static Random Access Memory)静态随机存储器;DRAM(Dynamic Random Access Memory)动态随机存储器;SDRAM(Synchronous Dynamic Random Access Memory)同步动态随机存储器。
简述内存管理单元的作用。
地址存储单元(MMU)主要有两个作用:①实现虚拟地址向物理地址的映射,即管理地址重定位;②管理访问权限。
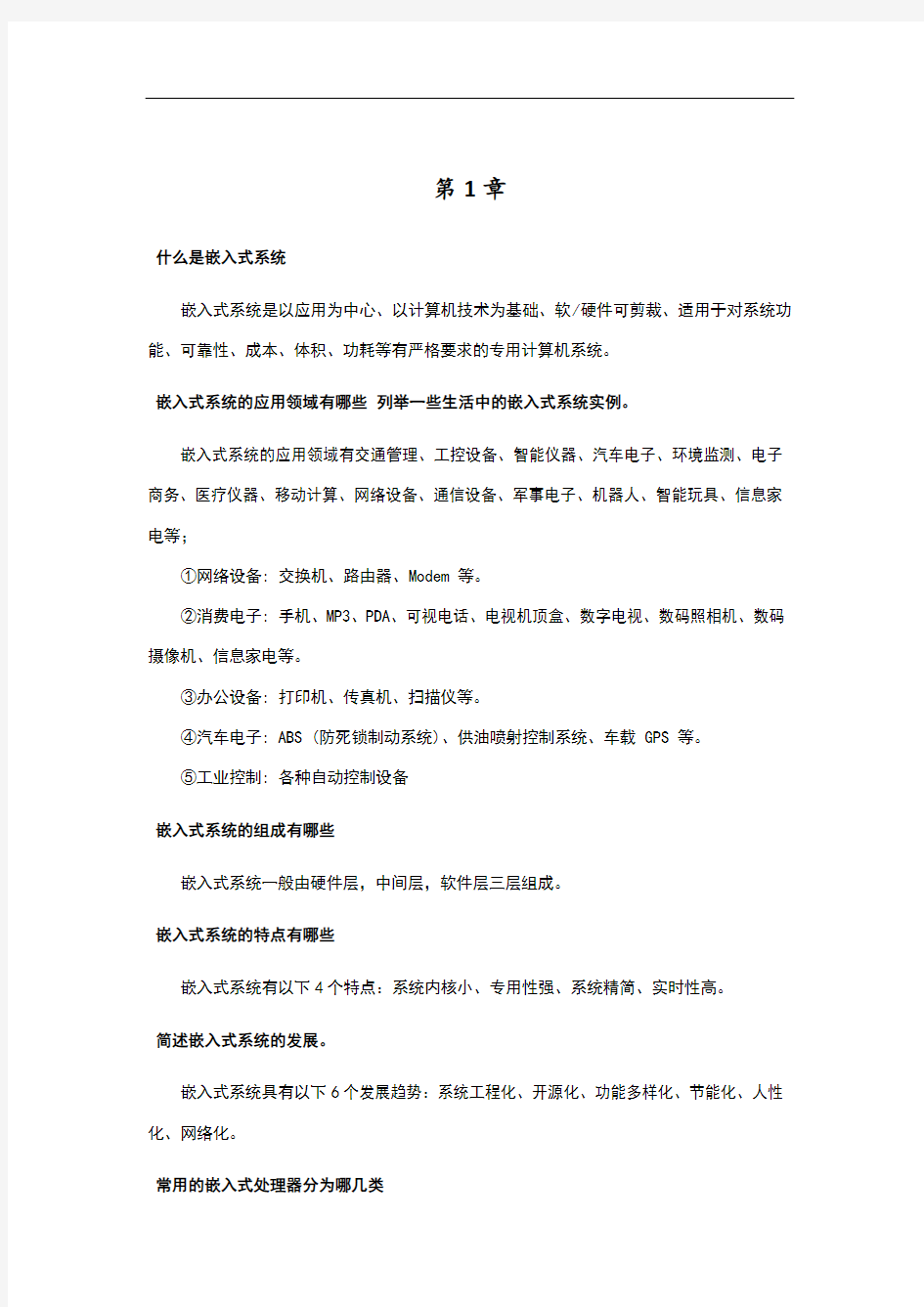
试描述ARM存储器管理的分页功能和处理流程。
ARM存储管理器将物理地址和虚拟地址都划分一块块的小空间,这种划分成为分页;CPU 访问的地址空间为虚拟地址空间,而存储器对应的是物理地址空间。当CPU去访问一个虚拟地址空间的时候,如下图所示,MMU会找到该虚拟地址空间的所属页,然后根据预先设置好的对应规则去寻找相应的物理地址的所属页,在物理页的基础上加上偏移量从而完成虚拟地址向物理地址的映射。一般情况下虚拟地址空间大于物理地址空间,所以有可能多块虚拟地址映射到同一物理地址,也有可能没有映射到物理地址,当用到该虚拟地址时才得到映射。
MMU处理流程
嵌入式系统的初始化过程包括哪些步骤
嵌入式系统初始化包括两大步:初始化运行环境,初始化应用程序。
在初始化运行环境的时候应该完成以下工作:标识初始化代码的入口;设置异常向量表、中断向量表; 初始化存储器系统; 初始化堆栈指针; 初始化一些关键的I/O口; 初始化中断系统需要的RAM变量;使能中断;如果需要,切换处理器模式;如果需要,切换处理器状态。
在初始化应用程序的时候应该完成以下工作:通过复制初始化数据到可写数据段来初始化非0 可写数据;对ZI数据段清零;存储器初始化后,程序控制权交给应用程序的入口,如C 运行时库。
简述S5PV210微处理器进行内存映射的机制。
S5PV210的虚拟地址由虚拟页号和页内偏移量两部分组成。MMU根据虚拟页号查找Translation Table找到虚拟页号对应的物理页,然后加上页内偏移量即可得到虚拟地址对
应的物理地址。例如如果虚拟地址的页内偏移量为4K,则需要12位来表示,即虚拟地址的低12位表示页内偏移量,其余高20位保存着映射关系的信息(如段式转化,粗细页转化,细页转化等转化方式,以及虚拟地址的页信息,映射方式,访问控制位等信息)。这些信息可以查阅cortex-a8的手册。
读以下程序, 说明程序功能
.text
.global _start
_start:
ldr r0, = 0xE2700000
mov r1, #0
str r1, [r0]
ldr sp, = 0xD0037D80 ;设置栈,以便调用 c 函数
ldr r0, = main
ldr r1, = 0xD0030000 ;0xd0030000 目标地址
ldr r2, = redirt_end
cmp r0, r1
beq run_on_dram
copy_loop:
ldr r3, [r0], #4 ;源
str r3, [r1], #4 ;目的
cmp r0, r2
bne copy_loop
run_on_dram:
ldr pc, = 0xD0030008 ;跳转
halt:
b halt
该段代码完成的功能是代码的复制以及重定位:将以标号main开始到redirt_end这段地址空间的代码复制到以0xD0030000(RAM 起始地址)为起始地址的存储区域。如果标号main的地址恰好等于0xD0030000就跳过复制,直接到RAM中去执行。
读以下电路图, 说明该内存单元应该如何和 S5PV210 微处理器进行硬件连接如何进行虚拟内存地址映射(图略)
略
第6章
简述嵌入式系统通过查询方式和中断方式获取数据的特点。
程序查询方式:操作简单,但因为处理器一直查询I/O端口或部件的状态,所以处理器的效率非常低。
中断方式:CPU在中断信号到来时决定是否处理该中断,处理完成后返回中断前的程序,继续执行效率高,但实现相对于查询方式复杂。
请阐述ARM的异常向量表的结构。
在ARM体系中,有7种异常处理。当异常发生时,处理器会把PC设置为一个特定的存储器地址。这一地址被放在异常向量表中。异常向量表包含一系列不能修改的指令,用以跳转到各异常的响应程序。ARM的异常向量表由异常类型对应的跳转指令构成。
软中断指令中的中断号可以通过哪几种方式获取
软中断指令中的中断号可以通过以下两种方式获取:①SWI指令后的24位立即数;②SWI指令后的24位立即数被忽略,中断号保存在R0寄存器中。
IRQ中断和FIQ中断发生时, 处理器进行哪些工作
IRQ中断和FIQ中断发生时的处理步骤如下:
1)初始化微处理器中断有关的寄存器,开放中断;
2)I/O端口或部件完成数据操作后产生中断请求信号;
3)当中断请求信号有效时,微处理器可能处在不可中断状态,等微处理器允许中断时保存当前状态,停止它现行的操作并开始进行中断源的识别;
4)在识别出优先级最高的中断源后,微处理器转到对应的中断服务例程入口,并应答中断,I/O端口或部件收到应答信号后,撤销其中断请求;
5)微处理器读入或写出数据,当中断服务例程结束后,返回到原来的被中断程序处继续执行。
中断处理完毕后,处理器是如何回到原来的程序断点处的
中断处理程序中首先应该保存现场(中断之前的现场,包括程序状态寄存器(CPSR),PC的指向等);在中断服务程序执行完毕之后,就要恢复现场,即重新加载PC,寄存器等。从而回到原来的程序断点处。
事实上,当异常发生时,分组寄存器R14和SPSR用于保存处理器状态,异常返回时,SPSR内容恢复到CPSR,连接寄存器R14恢复到程序计数器PC。
什么是向量中断控制器其主要工作是什么
向量中断控制器(Vectored Interrupt Controller),是中断控制器的组成部分。S5PV210的中断控制器有4个向量中断控制器(VIC)。向量中断控制器的主要工作是:支持93个向量IRQ 中断;配置中断优先级;硬件中断优先级屏蔽;产生 IRQ与FIQ;产生软件中断;限制访问特权模式等。
请解释中断优先级仲裁。
若嵌入式系统中有多个中断源,则这些中断源必须要进行中断优先级的排列。所谓优先级仲裁,指的是以下两层含义:
1)若有2个及2个以上的中断源同时提出中断请求,微处理器先响应哪个中断源,后响应哪个中断源。
2)若1个中断源提出中断请求,得到响应后,又有1个中断源提出中断请求,后来的中断源能否中断前一个中断源的中断服务程序。
在对图6-1所示硬件电路进行中断编程时,如果没有在中定义异常向量表,那么中断能够正常被响应吗为什么
不能。如果为未定义异常向量表,则CPU跳转到向量入口地址之后不知道接下该执行哪里的代码,无法正确跳转到中断服务程序中,因此不能正常响应。
第7章
简述通用定时器工作原理。
通用定时器内部工作原理:以一个N位的加1或减1计数器为核心,计数器的初始值由初始化编程设置,计数脉冲的来源有系统时钟或外部事件脉冲。若编程设置定时/ 计数器为定时工作方式时,则N 位计数器的计数脉冲来源于内部系统时钟,并经过M 分频。每个计数脉冲使计数器加1 或减1,当N 位计数器里的数加到0 或减到0 时, 则会产生一个“回0 信号”,该信号有效时表示N 位计数器里的当前值是0。因为系统时钟的频率是固定的, 其M 分频后所得到的计数脉冲频率也就是固定的,因此通过对该频率脉冲的计数就转换为定时,实现了定时功能。若编程设置定时/ 计数器为计数方式时,则N 位计数器的计数脉冲来源于外部事件产生的脉冲信号。有一个外部事件脉冲,则计数器加1 或减1,直到N 位计数器中的值为0,产生“回0信号”。
什么是ARM的脉宽调制定时器
S5PV210有5个32位双缓冲脉冲宽度调制定时器。配合定时器计数缓冲寄存器TCNTBn 和定时器比较缓冲寄存器TCMPBn ,可以很方便地实现脉宽调制功能,所以被称为脉宽调制定时器。
如何对S5PV210微处理器的定时器时钟进行分频 定时时间如何计算
定时器0和1共用一个可编程8位分频器,该分频器为PCLK 提供第一层分频,定时器2,3,4共用一个不同的8位分频器。每个定时器都有自己的专用时钟分频器提供第二层分频(又称分割器,可提供1,2,4,8,16分频)。定时时间=计数器初值*定时器时钟频率。 试编写定时器控制蜂鸣器鸣叫频率和占空比的程序。
参考代码如下:(篇幅有限,在此只给出核心代码供参考)
void timer_init(unsigned long utimer,unsigned long uprescaler,unsigned long udivider,unsigned long utcntb,unsigned long utcmpb)
{
unsigned long temp0; 1233q 2=
≈ 0.008
通信原理练习题
《通信原理》复习题 一、填空题 1、根据信道中传输的信号是否经过调制,可将通信系统分为 传输系统和 传输系统。 2、已知某离散信源的输出有5种状态,其统计特性为 12345111112481616x x x x x ?? ? ??? ,则该离散信源的平均信息量为 。 3、码元速率相同时,八进制的信息速率是二进制的 倍(等概率时)。 4、按照传输媒体区分,信道可以分为两大类: 和 。 5、调制信道分为两类,即 信道和 信道。 6、幅度调制,是指高频载波的振幅按照基带信号振幅瞬时值的变化规律而变化的调制方式。它是一种线性调制,包括四种调制制度,分别是 、 、 、 。 7、角度调制、是指高频载波的 或相位按照基带信号的规律而变化的一种调制方式。它是一种非线性调制。它包括两种调制制度,分别 、 。 8、已知信息代码为1011000000000101,则其相应的AMI 码为 HDB3码为 、双相码为 。 9、相邻码元间的 称为码间串扰。码间串扰产生的原因是 。 10、对于二进制双极性信号,假设它在抽样时刻的电平取值为+A 和—A ,若(1)(0)1/2P P ==,则最佳判决门限电平为 。若为单极性信号,电平取值为+A 和0,且(1)(0)1/2P P ==,则最佳判决门限电平为 。 11、针对数字基带传输系统的基本问题,两种改善系统性能的实际技术是: 、 。 12、根据通信距离、频率和位置的不同,电磁波的传播可以分为 、 、 。 13、对于M 进制码元的传输中,码元速率B R 和信息速率b R 之间的关系为 。 14、在16进制系统中,已知码元速率为1200B ,则信息速率为 。 15、信号在随参信道中传输时,产生快衰落(fading )的主要原因是 。 17、在相干解调时,为了无失真地恢复基带信号,接收端必须提供一个与接收信号的载波 本地载波。 18、模拟调制分为两大类: 和 。 19、2PSK 方式在实际中很少采用的主要原因是 。 20、MASK 调制信号的带宽是基带信号带宽的 倍。 21、DPSK 的中文全称是 。 22、信道是连接 和 的通信设备。信道可分为两大类 和 。 23、量化器的平均输出信号量噪比随 的增大而增大。
嵌入式系统原理与应用技术
1.嵌入式系统的定义:一般都认为嵌入式系统是以应用为中心,以计算机技术为基础,并且软硬件可裁剪,可满足应用系统对功能、可靠性、成本、体积和功能有严格要求的专用计算机系统。 2.嵌入式系统的特征:(1)通常是面向特定应用的。具有功耗低、体积小和集成度高等特点。(2)硬件和软件都必须高效率地设计,量体裁衣,力争在同样的硅片面积上实现更高的性能,这样才能满足功能、可靠性和功耗的苛刻要求。(3)实时系统操作支持。(4)嵌入式系统与具体应用有机结合在一起,升级换代也同步进行。(5)为了提高运行速度和系统可靠性,嵌入式系统中的软件一般固化在存储器芯片中。 3.ARM嵌入式微系统的应用:工业控制、网络系统、成像和安全产品、无线通信、消费类电子产品。 4.ARM嵌入式微处理器的特点:(1)体积小、低功耗、低成本、高性能。(2)支持Thumb(16位)/ARM(32位)双指令集,兼容8位/16位器件。(3)使用单周期指令,指令简洁规整。(4)大量使用寄存器,大多数数据都在寄存器中完成,只有加载/存储指令可以访问存储器,以提高指令的执行效率。(5)寻址方式简单灵活,执行效率高。(6)固定长度的指令格式。 5.嵌入式系统一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统、用户软件构成。 2.哈佛体系结构的主要特点是将程序和数据存储在不同的存储空间。 3.嵌入式处理器主要有四种嵌入式微处理器(EMPU)、嵌入式微控制器(MCU)、嵌入式数字信号处理器(DSP)、嵌入式片上系统(SoC) 4.ARM7采用3级流水线结构,采用冯·诺依曼体系结构;ARM9采用5级流水线结构,采用哈佛体系结构。 5.ARM处理器共有37个32bit寄存器,包括31个通用寄存器和6个状
嵌入式系统设计题库
一、单项选择题 1、在CPU和物理内存之间进行地址转换时,(B )将地址从虚拟(逻辑)地址空间映射到物理地址空间。 A.TCB B.MMU C.CACHE D.DMA 2、进程有三种状态:(C )。 A.准备态、执行态和退出态B.精确态、模糊态和随机态 C.运行态、就绪态和等待态D.手工态、自动态和自由态 3、以下叙述中正确的是(C )。 A.宿主机与目标机之间只需要建立逻辑连接即可 B.在嵌入式系统中,调试器与被调试程序一般位于同一台机器上 C.在嵌入式系统开发中,通常采用的是交叉编译器 D.宿主机与目标机之间的通信方式只有串口和并口两种 4、中断向量是指(C )。 A.中断断点的地址B.中断向量表起始地址 C.中断处理程序入口地址D.中断返回地址 5、在微型计算机中,采用中断方式的优点之一是(C )。 A.简单且容易实现B.CPU可以不工作 C.可实时响应突发事件D.传送速度最快 6、在ARM处理器中,(A )寄存器包括全局的中断禁止位,控制中断禁止位就可以打开或者关闭中断。 A.CPSR B.SPSR C.PC D.IR 7、嵌入式系统的三要素下面哪一个不是:(B )。 A、嵌入 B、存储器 C、专用 D、计算机 8、若R1=2000H,(2000H)=0x28,(2008H)=0x87,则执行指令LDR R0,[R1,#8]!后R0的值为()。 A、0x2000 B、0x28 C、0x2008 D、0x87 9、μCOS-II操作系统属于(B )。 A、顺序执行系统 B、占先式实时操作系统 C、非占先式实时操作系统 D、分时操作系统 10、ARM寄存器组有( C )个状态寄存器。 A、7 B、32 C、6 D、37 11、C++源程序文件的默认扩展名为(A )。 A、cpp B、exe C、obj D、lik 12、与十进制数254等值的二进制数是(A )。 A、B、 C、D、
机械原理试题及答案试卷答案
机械原理试题及答案试 卷答案 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
2013年机械原理自测题(一) 一.判断题(正确的填写“T”,错误的填写“F”)(20分) 1、根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。 ( F ) 2、对心的曲柄滑块机构,其行程速比系数K一定等于一。 ( T ) 3、在平面机构中,一个高副引入二个约束。 ( F ) 4、在直动从动件盘形凸轮机构中,若从动件运动规律不变,增大基圆半径, 则压力角将减小 ( T ) 5、在铰链四杆机构中,只要满足杆长和条件,则该机构一定有曲柄存在。( F ) 6、滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的等距曲线。 ( T )7、在机械运动中,总是有摩擦力存在,因此,机械功总有一部分消耗在克服摩擦力上。 ( T ) 8、任何机构的从动件系统的自由度都等于零。( T ) 9、一对直齿轮啮合传动,模数越大,重合度也越大。 ( F ) 10、在铰链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。。( F ) 二、填空题。(10分) 1、机器周期性速度波动采用(飞轮)调节,非周期性速度波动采用(调速器)调节。 2、对心曲柄滑块机构的极位夹角等于( 0 )所以(没有)急回特性。 3、渐开线直齿圆柱齿轮的连续传动条件是(重合度大于或 等于1 )。 4、用标准齿条形刀具加工标准齿轮产生根切的原因是(齿条形刀具齿顶线超过极限啮合点N1 )。 5、三角螺纹比矩形螺纹摩擦(大),故三角螺纹多应用(
联接 ),矩形螺纹多用于( 传递运动和动力 )。 三、选择题 (10分) 1、齿轮渐开线在( )上的压力角最小。 A ) 齿根圆 ; B )齿顶圆; C )分度圆; D )基圆。 2、静平衡的转子( ① )是动平衡的。动平衡的转子( ②)是静平衡的 。 ①A )一定 ; B )不一定 ; C )一定不。 ②A )一定 ; B )不一定: C )一定不。 3、满足正确啮合传动的一对直齿圆柱齿轮,当传动比不等于一时,他们的渐开线齿形是( )。 A )相同的; B )不相同的。 4、对于转速很高的凸轮机构,为了减小冲击和振动,从动件运动规律最好采用( )的运动规律。 A )等速运动; B )等加等减速运动 ; C )摆线运动。 5、机械自锁的效率条件是( )。 A )效率为无穷大: B )效率大于等于1; C )效率小于零。 四、计算作图题: (共60分) 注:凡图解题均需简明写出作图步骤,直接卷上作图,保留所有作图线。 1、计算下列机构的自由度。 (10分) F = 3×8-2×11 = 2 F = 3×8-2×11 - 1 = 1 2、在图4-2所示机构中,AB = AC ,用瞬心法说明当构件1以等角速度转动时,构件3与机架夹角Ψ为多大时,构件3的 ω3 与ω1 相等。 (10分) 当ψ = 90°时,P13趋于无穷远处, 14 133413P P P P =∴
通信原理题目(1)
第一章绪论 填空 1、在八进制中(M=8),已知码元速率为1200B,则信息速率为3600b/s 。 2、在四进制中(M=4),已知信息速率为2400b/s,则码元速率为1200B 。 3、数字通信与模拟通信相比较其最大特点是_占用频带宽和__噪声不积累_。 4、数字通信系统的有效性用传输频带利用率衡量,可靠性用差错率衡量。 5、模拟信号是指信号的参量可连续取值的信号,数字信号是指信号的参量可离散取值的信号。 消息:指通信系统传输的对象,它是信息的载体。是信息的物理形式 信息:是消息中所包含的有效内容。 信号:是消息的传输载体! 信息源的作用就是把各种消息转换成原始信号。 发送设备:产生适合在信道中传输的信号,使发送信号的特性和信道特性相匹配,具有抗信道干扰的能力,可能包含变换、放大、滤波、编码、调制等过程。 简答 1、码元速率与信息速率的关系?R b=R B log2M R b信息传输速率R B码元速率M是进制T B码元长度R B=1/T B 2、按传输信号的复用方式,通信系统如何分类? 答:按传输信号的复用方式,通信系统有三种复用方式,即频分复用、时分复用和码分复用。频分复用是用频谱搬移的方法使不同信号占据不同的频率范围;时分复用是用抽样或脉冲调制方法使不同信号占据不同的时间区间;码分复用则是用一组包含正交的码字的码组携带多路信号。 3、解释半双工通信和全双工通信,并用实际通信系统举例说明? 半双工,双向不同时通信,如:对讲机;双工,双向同时通信,如:移动通信系统 4、简述数字通信系统的基本组成以及各部分功能,画出系统框图。 信源:把各种消息转换成原始信号。 信道:用来将来自发送设备的信号传送到发送端。 信宿:传送消息的目的地。 信源编码/译码:提高信息传输的有效性,二是完成模/数转换。 信道编码/译码:作用是进行差错控制。 加密解密:为了保证所传信息的安全。 数字调制解调:把数字基带信号的频谱搬移到高频处,形成适合在信道传输的带通信号。 第二章确知信号 填空 1、确知信号:是指其取值在任何时间都是确定的和可预知的信号,通常可以用数学公式表示它在任何时间的取值。
大作业设计报告书(嵌入式系统原理与开发)
大作业设计报告书 题目:嵌入式系统原理与开发 院(系):物联网工程学院 专业: 班级: 姓名: 指导老师: 设计时间: 10-11 学年 2 学期 20XX年5月
目录 1.目的和要求 (3) 2.题目内容 (3) 3.设计原理 (4) 4.设计步骤 (5) 4.1 交通指示灯设计 (5) 4.2 S3C44B0X I/O 控制寄存器 (6) 4.3 红绿灯过渡代码: (8) 4.4 电源电路设计 (10) 4.5 系统复位电路设计 (11) 4.6 系统时钟电路设计 (11) 4.7 JTAG 接口电路设计 (12) 4.8串口电路设计 (12) 5.引脚分类图 (13) 6.参考文献 (13)
1.目的和要求 ARM技术是目前嵌入式应用产业中应用十分广泛的先进技术,课程开设的目的在于使学生在了解嵌入式系统基础理论的前提下能够掌握ARM处理器的汇编语言和c语言的程序设计方法,掌握S3C44B0X芯片的基本硬件结构特点和接口设计方法,同时熟悉ARM开发环境,学习ARM的硬件设计和软件编程的基本方法,为今后从事相关的应用与研究打下基础。通过大作业要达到如下目的: 一、掌握ARM的开发工具使用和软件设计方法。 二、掌握ARM处理器S3C44B0X的原理和GPIO接口设计原理。 三、掌握C语言与的ARM汇编语言的混合编程方法; 四、培养学生选用参考,查阅手册及文献资料的能力。培养独立思考,深入研 究,分析问题、解决问题的能力。 五、通过课程设计,培养学生严肃认真的工作作风。 2.题目内容 题目:交通指示灯系统设计 功能描述: 1.用S3C44B0X的GPIO设计相关电路; 2.设计相关的软件并注释; 3.实现十字路口2组红、黄、绿交通灯交替显示。 编程提示: 1.交通灯可用发光二极管代替; 2.电路可部分参照实验电路; 3.时间控制可以使用软件循环编程解决。
嵌入式系统设计师练习题及答案解析
嵌入式系统设计师练习题及答案第一套 (1) 嵌入式系统设计师练习题及答案第二套 (5) 嵌入式系统设计师练习题及答案第三套 (16) 嵌入式系统设计师练习题及答案解析第四套 (27) 嵌入式系统设计师练习题及答案解析第五套 (45) 嵌入式系统设计师练习题及答案解析第六套 (59) 嵌入式系统设计师练习题及答案解析第七套 (67) 嵌入式系统设计师练习题及答案解析第八套 (75) 嵌入式系统设计师练习题及答案解析第九套 (81) 嵌入式系统设计师练习题及答案解析第十套 (90) 嵌入式系统设计师练习题及答案解析第十一套 (99) 嵌入式系统设计师练习题及答案解析第十二套 (106) 嵌入式系统设计师练习题及答案解析第十三套 (115) 嵌入式系统设计师练习题及答案解析第十四套 (126) 嵌入式系统设计师练习题及答案解析第十五套 (139) 嵌入式系统设计师练习题及答案解析第十六套 (154) 嵌入式系统设计师练习题及答案解析第十七套 (161) 嵌入式系统设计师练习题及答案解析第十八套 (169) 嵌入式系统设计师练习题及答案解析第十九套 (177) 嵌入式系统设计师练习题及答案解析第二十套 (189) 嵌入式系统设计师练习题及答案解析第二十一套 (199) 嵌入式系统设计师练习题及答案解析第二十二套 (212) 嵌入式系统设计师练习题及答案第一套 1、以下关于CPU的叙述中,错误的是 A.CPU产生每条指令的操作信号并将操作信号送往相应的部件进行控制
B.程序计数器PC除了存放指令地址,也可以临时存储算术/逻辑运算结果 C.CPU中的控制器决定计算机运行过程的自动化 D.指令译码器是CPU控制器中的部件 2、以下关于Cache的叙述中,正确的是 A.在容量确定的情况下,替换算法的时间复杂度是影响Cache命中率的关键因素 B.Cache的设计思想是在合理成本下提高命中率 C.Cache的设计目标是容量尽可能与主存容量相等 D.CPU中的Cache容量应大于cPu之外的Cache容量 3、风险预测从两个方面评估风险,即风险发生的可能性以及 A.风险产生的原因 B.风险监控技术 C.风险能否消除 D.风险发生所产生的后果 4、许多程序设计语言规定,程序中的数据都必须具有类型,其作用不包括 A.便于为数据合理分配存储单元 B.便于对参与表达式计算的数据对象进行检查 C.便于定义动态数据结构 D.使于规定数据对象的取值范围及能够进行的运算 5、在计算机系统中,对程序员是透明的。 A.磁盘存储器 B.高速缓存 C.RAM存储器 D.flash存储器
《机械原理》试题及答案
试题 1 3、 转动副的自锁条件是 驱动力臂≤摩擦圆半径 。 一、选择题(每空 2 分,共 10 分) 4、 斜齿轮传动与直齿轮传动比较的主要优点: 啮合性能好,重合度大,结构紧凑 。 1、平面机构中,从动件的运动规律取决于 D 。 A 、从动件的尺寸 B 、 机构组成情况 C 、 原动件运动规律 D 、 原动件运动规律和机构的组成情况 2、一铰链四杆机构各杆长度分别为30mm ,60mm ,80mm ,100mm ,当以 30mm 5、 在周转轮系中,根据其自由度的数目进行分类:若其自由度为 2,则称为 差动轮 系 ,若其自由度为 1,则称其为 行星轮系 。 6、 装有行星轮的构件称为 行星架(转臂或系杆) 。 7、 棘轮机构的典型结构中的组成有: 摇杆 、 棘爪 、 棘轮 等。 三、简答题(15 分) 1、 什么是构件? 的杆为机架时,则该机构为 A 机构。 答:构件:机器中每一个独立的运动单元体称为一个构件;从运动角度讲是不可再分的 A 、双摇杆 B 、 双曲柄 C 、曲柄摇杆 单位体。 2、 何谓四杆机构的“死点”? 答:当机构运转时,若出现连杆与从动件共线时,此时γ=0,主动件通过连杆作用于从 D 、 不能构成四杆机构 动件上的力将通过其回转中心,从而使驱动从动件的有效分力为零,从动件就不能运动, 3、凸轮机构中,当推杆运动规律采用 C 时,既无柔性冲击也无刚性冲击。 A 、一次多项式运动规律 B 、 二次多项式运动规律 C 、正弦加速运动规律 D 、 余弦加速运动规律 4、平面机构的平衡问题中,对“动不平衡”描述正确的是 B 。 A 、只要在一个平衡面内增加或出去一个平衡质量即可获得平衡 B 、 动不平衡只有在转子运转的情况下才能表现出来 机构的这种传动角为零的位置称为死点。 3、 用范成法制造渐开线齿轮时,出现根切的根本原因是什么?避免根切的方法有哪 些? 答:出现根切现象的原因:刀具的顶线(不计入齿顶比普通齿条高出的一段c*m )超过 了被切齿轮的啮合极限点 N 1,则刀具将把被切齿轮齿根一部分齿廓切去。 避免根切的方法:(a )减小齿顶高系数 ha*.(b)加大刀具角α.(c)变位修正 四、计算题(45 分) 1、 计算如图 1 所示机构的自由度,注意事项应说明?(5*2) C 、静不平衡针对轴尺寸较小的转子(转子轴向宽度 b 与其直径 D 之比 b/D<0.2) D 、 使动不平衡转子的质心与回转轴心重合可实现平衡 5、渐开线齿轮齿廓形状决定于 D 。 A 、模数 C D E C D B B F G B 、 分度圆上压力角 A A C 、齿数 D 、 前 3 项 a b 二、填空题(每空 2 分,共 20 分) 1、 两构件通过面接触而构成的运动副称为 低副 。 2、 作相对运动的三个构件的三个瞬心必 在同一条直线上 。 图 1 小题 a :其中 A 、B 处各有一个转动副,B 处有一个移动副,C 、D 处的移动副记作一个 1 《机械原理》试题及答案
通信原理练习题
第一章绪论 一、填空题 1、数字通信系统的主要性能指标就是有效性与可靠性。码元速率R B定义就是每秒传送码元的数目,单位Baud。信息速率定义就是每秒钟传送的信息量,单位bit/s。 2、数字通信系统的有效性用传输速率衡量,可靠性用差错率衡量。 3、模拟通信系统的有效性用传输带宽衡量,可靠性用信噪比衡量。 4、在等概条件下,八元离散信源能达到最大熵就是3bit/符号,若该信源每秒钟发送2000个符号,则该系统的信息速率为6k bit/s。 5、通信系统的有效性衡量指标对于模拟通信系统为传输带宽,对于数字通信系统为传输速率。 6、通信系统的可靠性衡量指标对于模拟通信系统为信噪比对于数字通信系统为差错率。 7、一个M进制基带信号,码元周期为T S秒,则传码率为1/T S波特,若码元等概出现,一个码元所含信息量为log2M (bit)。 8、通信系统模型中有两个变换,它们分别就是非电量与电量之间的变换与基带信号与频带信号之间的变换。 9、模拟信号就是指信号的参量可连续取值的信号,数字信号就是指信号的参量可离散取值的信号。 10根据信道中所传输信号特征的不同,通信系统可分为模拟通信系统与数字通信系统。 二、画图 1、画出模拟通信系统的一般模型。
2、画出通信系统的简化模型。 三、计算题 1、对于二电平数字信号,每秒传输300个码元,问此传码率R B 等于多少?若该数字信号0与1出现就是独立等概率的,那么传信率R b 等于多少? band R B 300 s bit R b /300= 2、、现有一个由8个等概符号组成的信源消息符号集,各符号间相互独立,每个符号的宽度为0、1ms 。计算: (1)平均信息量;(2)码元速率与平均信息速率;(3)该信源工作2小时后所获得的信息量;(4)若把各符号编成二进制比特后再进行传输,在工作2小时后发现了27个差错比特(若每符号至多出错1位),求传输的误比特率与误符号率。 解:(1)符号)/(38log log 22bit M H === (2)T s =0、1ms ,所以B aud 10000R s T 1 B == 30kbit/s 310000H R R B b =?=?= (3)216Mbit/s 3600210303=???=?=t R I b (4)误比特率 561025.110 21627-?=?=b P 2小时传送的码元数为7B 107.23600210000t R N ?=??==
机械原理试题及答案
第七章齿轮机构及其设计 一、选择题 1.渐开线在______上的压力角、曲率半径最小。 A.根圆 B.基圆 C.分度圆 D.齿顶圆 2.一对渐开线直齿圆柱齿轮的啮合线相切于______。 A.两分度圆 B.两基圆 C.两齿根圆 D.两齿顶圆 3.渐开线齿轮的标准压力角可以通过测量_______求得。 A.分度圆齿厚 B.齿距 C.公法线长度 D.齿顶高 4.在范成法加工常用的刀具中,________能连续切削,生产效率更高。 A.齿轮插刀 B.齿条插刀 C.齿轮滚刀 D.成形铣刀 5.已知一渐开线标准直齿圆柱齿轮,齿数z=25,齿顶高系数h a*=1,齿顶圆直径D a=135mm,则其模数大 小应为________。 A.2mm B.4mm C.5mm D.6mm 6.用标准齿条刀具加工正变位渐开线直齿圆柱外齿轮时,刀具的中线与齿轮的分度圆__________。 A.相切 B.相割 C.相离 D.重合 7.渐开线斜齿圆柱齿轮分度圆上的端面压力角__________法面压力角。 A.大于 B.小于 C.等于 D.大于或等于 8.斜齿圆柱齿轮基圆柱上的螺旋角βb与分度圆上的螺旋角β相比_________。 A.βb >β B.βb =β C.βb <β D. βb =>β 9.用齿条型刀具加工,αn=20°,h a*n =1,β=30°的斜齿圆柱齿轮时不根切的最少数是_________。 A.17 B.14 C.12 D.26 10.渐开线直齿圆锥齿轮的当量齿数z v=__________。 A.z/cosβ B.z/cos2β C.z/cos3β D.z/cos4β 11.斜齿圆柱齿轮的模数和压力角之标准值是规定在轮齿的_________。 A.端截面中 B.法截面中 C.轴截面中 D.分度面中 12.在一对渐开线直齿圆柱齿轮传动时,齿廓接触处所受的法向作用力方_________。 A.不断增大 B.不断减小 C.保持不变 D.不能确定 13.渐开线齿轮齿条啮合时,其齿条相对齿轮作远离圆心的平移时,其啮合角_____。 A.加大 B.不变 C.减小 D.不能确定 14.一对渐开线斜齿圆柱齿轮在啮合传动过程中,一对齿廓上的接触线长度________变化的。 A.由小到大 B.由大到小 C.由小到大再到小 D.保持定值 15.一对渐开线齿廓啮合时,啮合点处两者的压力角__________。 A.一定相等 B.一定不相等 C.一般不相等 D.无法判断 16在渐开线标准直齿圆柱齿轮中,以下四个参数中________决定了轮齿的大小及齿轮的承载能力。 A.齿数z B.模数m C.压力角α D.齿顶系数h a* 17.在渐开线标准直齿圆柱齿轮中,以下四个参数中________决定了齿廓的形状和齿轮的啮合性能。 A.齿数z B.模数m C.压力角α D.齿顶系数h a* 18和标准齿轮相比,以下变位齿轮的四个参数中________已经发生了改变。 A.齿距p B.模数m C.压力角α D.分度圆齿厚 二、判断题 1.一对能正确啮合传动的渐开线直齿圆柱,其啮合角一定是20°。()
通信原理第3章例题
【 例 3 一 1 】某通信系统发送部分框图如图 3 一9 ( a )所示,其中载频 3c ω>>Ω,()1m t 和()2m t 是要传送的两个基带调制信号,它们的频谱如图3 一9 ( b )所示。 ( 1 )写出合成信号m ( t )的频谱表达式,并画出其频谱图。 ( 2 )写出已调波s( t )的频域表达式,并画出其频谱图。 ( 3 )画出从s( t )得到()1m t 和()2m t 的解调框图。 解:( 1 )由图 3 一 9 ( a )知:()()()12cos2m t m t m t t =+Ω 其对应的频谱表达式为()()()()1221 222 M M M M ω=ω+ω+Ω+ω-Ω???? 频谱图如图3-10(a )所示。 ( 2 )由图3 一9 ( a )知 ()()()()()()()()()1212122cos cos 2cos cos cos 2cos 11 cos cos(2)cos(2)22 c c c c c c c s t m t t m t m t t t m t t m t t t m t t m t t m t t =ω=+Ωω????=ω+Ωω=ω+ω+Ω+ω-Ω s( t )频谱表达式为
()()()()()()()1122221 21 22224 c c c c c c S M M M M M M ω= ω+ω+ω-ω??? ?+ω+ω+Ω+ω-ω-Ω+ω+ω-Ω+ω-ω+Ω??? ? 其频谱图如图3-10 ( b )所示。 ( 3 )解调框图如图3-11 所示。 【 例3 一2 】图3 一12 是对DSB 信号进行相干解调的框图。图中n ( t )是均值为O 、双边功率谱密度为n 0/2 的加性高斯白噪声,本地恢复的载波和发送载波有固定的相位差θ。求该系统的输出信噪比。
嵌入式系统原理与应用习题解析
1.8 练习题P14 1.选择题 (1)A 说明:嵌入式系统的发展趋势表现在以下几方面: 1.产品种类不断丰富,应用范围不断普及 2.产品性能不断提高 3.产品功耗不断降低,体积不断缩小 4.网络化、智能化程度不断提高 5.软件成为影响价格的主要因素 (2)D
说明:常见的嵌入式操作系统: VxWorks,Windows CE、uC/OS-II和嵌入式Linux。 (3)A 说明:VxWorks是美国WindRiver公司于1983年开发的一种32位嵌入式实时操作系统。 2.填空题 (1)嵌入式计算机 (2)微处理器外围电路外部设备 (3)板级支持包实时操作系统应用编程接口应用程序 (4)嵌入式处理器微控制器数字信号处理器 3.简答题 (1)简述嵌入式系统的定义和特点 答:定义:以应用为中心,以计算机技术为基础,软硬件可裁剪,应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。 特点:专用性强、实时性好、可裁剪性好、可靠性高和功耗低等。(2)简述计算机系统的发展历程 第一阶段大致在20世纪70年代前后,可以看成是嵌入式系统的萌芽阶段; 第二阶段是以嵌入式微处理器为基础,以简单操作系统为核心的嵌入式系统; 第三阶段是以嵌入式操作系统为标志的嵌入式系统,也是嵌入式应用
开始普及的阶段; 第四阶段是以基于Internet为标志的嵌入式系统,这是一个正在迅速发展的阶段。 (3)简述MCU和DSP的区别 MCU是微控制器,DSP是数字信号处理器。 MCU相当于小型的电脑,内部集成的CPU、ROM、RAM、I/O总线,所以集成度高是它的特点。 DSP是专用的信息处理器,内部的程序是对不同的机器和环境进行特别优化,所以处理速度是最快的。 2.4 练习题 1. 填空题 (1) ARM7 ARM9 ARM9E ARM10E ARM11 (2) 精简指令集计算机 (3) Samsung ARM920T IIC总线 (4) BGA 显卡布线 (5) 1.8V 3.3V (6) 8 128 1 (7) S3C2410 64MB 64MB 2. 选择题 (1) D (2)C (3)A (4)B (5)B (6)C (7)D (8)C (9)C (10)B
机械原理试题及答案试卷答案
机械原理试题及答案试卷 答案 Newly compiled on November 23, 2020
2013年机械原理自测题(一) 一.判断题(正确的填写“T”,错误的填写“F”)(20分) 1、根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。( F ) 2、对心的曲柄滑块机构,其行程速比系数K一定等于一。( T ) 3、在平面机构中,一个高副引入二个约束。( F ) 4、在直动从动件盘形凸轮机构中,若从动件运动规律不变,增大基圆半径, 则压力角将减小 ( T ) 5、在铰链四杆机构中,只要满足杆长和条件,则该机构一定有曲柄存在。( F ) 6、滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的等距曲线。 ( T )7、在机械运动中,总是有摩擦力存在,因此,机械功总有一部分消耗在克服摩擦力上。( T ) 8、任何机构的从动件系统的自由度都等于零。( T ) 9、一对直齿轮啮合传动,模数越大,重合度也越大。 ( F ) 10、在铰链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。。( F ) 二、填空题。(10分) 1、机器周期性速度波动采用(飞轮)调节,非周期性速度波动采用(调速器)调节。 2、对心曲柄滑块机构的极位夹角等于( 0 )所以(没有)急回特性。 3、渐开线直齿圆柱齿轮的连续传动条件是(重合度大于或 等于1 )。 4、用标准齿条形刀具加工标准齿轮产生根切的原因是(齿条形刀具齿顶线超过极限啮合点N1 )。 5、三角螺纹比矩形螺纹摩擦(大),故三角螺纹多应用( 联接),矩形螺纹多用于(传递运动和动力)。 三、选择题(10分) 1、齿轮渐开线在()上的压力角最小。
通信原理习题
1.1什么是通信?通信系统是如何分类的? 1.2 模拟信号和数字信号的区别是什么? 1.3何谓数字通信?数字通信的优缺点是什么? 1.4 请画出数字通信系统的基本原理方框图,并说明各个环节的作用。 1.5对于二进制信息源,在等概发送时,每一符号所包含的信息量是否等于其平均信息量? 1.6 衡量数字通信系统的主要性能指标是什么? 1.7设英文字母中A、B、C、D出现的概率各为0.001,0.023,0.003,0.115,试分别求出它们的信息量。 1.8已知某四进制信源{0,1,2,3},每个符号独立出现,对应的概率为P0,P1,P2,P3,且P0+P1+P2+P3=1。 ⑴试计算该信源的平均信息量。 ⑵指出每个符号的概率为多少时,平均信息量最大,为多少? 1.9已知二进制信号的传输速率为4800b/s,试问变换成四进制和八进制数字信号时的传输速率各为多少?(码元速率不变) 1.10在强干扰环境下,某电台在5min内共接收到正确信息量为355Mb,假定系统信息速率为1200kb/s, ⑴试问系统误信率P b = ? ⑵若具体指出系统所传数字信号为四进制信号,P b值是否改变?为什么? ⑶若假定信号为四进制信号,系统传输速率为1200 KB,则P b=? 1.11 设一信息源的输出由256个不同符号组成,其中32个出现的概率为1/64,其余224个出现的概率为1/448。信息源每秒发出2400个符号,且每个符号彼此独立。试计算该信息源发送信息的平均速率及最大可能的信息速率。 1.12 二进制数字信号以速率200b/s传输,对此通信系统连续进行2小时的误码测试,结果发现15bit差错。问该系统的误码率为多少?如果要求误码率在1×10-7以下,原则上应采取一些什么措施?
嵌入式系统模拟试题及答案
学习中心/函授站_ 姓名学号 西安电子科技大学网络与继续教育学 院 2014学年下学期 《嵌入式系统》期末考试试题 (综合大作业) 题号一二三四五总分 题分2010302020 得分 考试说明: 1、大作业于2014年12月25日下发,2015年1月10日交回; 2、考试必须独立完成,如发现抄袭、雷同均按零分计; 3、答案须手写完成,要求字迹工整、卷面干净。 一、问题简述(每小题4分,共20分) 1、简述嵌入式系统的定义和组成结构。 答:嵌入式系统是以应用为中心,以计算机技术为基础,并软硬件可剪裁、功能、 ,可靠性、体积、重量、成本、功耗、成本、安装方式等方面符合要求的专用计算机系统。 嵌入式系统一般由嵌入式微处理器、存储与I/O部分、外设与执行部分、嵌入式软件等四个部分组成。 2、简单说明ARM微处理器的特点。 答:(1) 体积小、低功耗、低成本、高性能。 (2) 支持Thumb(16位)/ARM(32位)双指令集,能很好地兼 容8位/16位器件。
(3) 大量使用寄存器,指令执行速度更快。 (4) 大多数数据操作都在寄存器中完成,通过Load/Store结 构在内存和寄存器之间批量传递数据。 (5) 寻址方式灵活简单,执行效率高。 (6) 指令长度固定。 3、简述嵌入式系统产品的设计和开发过程。 答:①在嵌入式系统的开发过程中,一般采用的方法是首先在通用PC机上的集成开发环境中编程;②然后通过交叉编译和链接,将程序转换成目标平台(嵌入式系统)可以运行的二进制代码;③接着通过嵌入式调试系统调试正确;④最后将程序下载到目标平台上运行。 要强调,选择合适的开发工具和调试工具,对整个嵌入式系统的开发都非常重要。 4、简述嵌入式系统设计中要考虑的因素。 答:在嵌入式系统的开发过程中,要考虑到实时性、可靠性、稳 定性、可维护性、可升级、可配置、易于操作、接口规范、抗干 扰、物理尺寸、重量、功耗、成本、开发周期等多种因素。 5、什么是BootLoader,了解其在嵌入式系统中作用。 答:就是启动载入或引导加载又叫自举装载。由于系统加电后需 要首先运行BootLoader这段程序,因此它需要放在系统加电后 最先取指令的地址上。嵌入式处理器的生产厂商都为其处理器预 先安排了一个在系统加电或复位后最先取指令的地址。 二、名词解释(每小题2分,共10分) 1、DSP(Digital Signal Processor),数字信号处理器,一种特别用于快速处理数字信号的微处理器。DSP处理器对系统结构和指令进行了特殊设计,使其适合于执行DSP算法,编译效率较高,指令执行速度也较高。 2、RTOS Real Time Operating System. 译为实时操作系统。实时系统是指一个能够在指定的或者确定的时间内,实现系统功能和对外部或内部、同步或异步事件作出响应的系统。 3、BSP设计板级支持包(BSP)的目的主要是为驱动程序提供访问硬件设备寄存器的函数包,从而实现对操作系统的支持。类似于PC机上的BIOS,是一个承上启下的软件层次。由嵌入OS和用户开发相结合取得。BSP一般是在嵌入式系统上固化存放。 4、总线竞争就是在同一总线上,同一时刻,有两个以上器件要通
机械原理试题及答案
机械原理自测题(二) 一、判断题。(正确的填写“T”,错误的填写“F”)(20分) 1、一对相啮合的标准齿轮,小轮的齿根厚度比大轮的齿根厚度大。( F ) 2、在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。( T ) 3、两构件之间以点、线接触所组成的平面运动副称为高副,它产生两个约 束,而保留一个自由度。( F) 4、一对直齿轮啮合传动,模数越大,重合度也越大。(F) 5、平面四杆机构有无急回特性取决于极位夹角是否大于零。(T) 6、对于刚性转子,已满足动平衡者,也必满足静平衡。(T) 7、滚子从动件盘形凸轮的基圆半径和压力角应在凸轮的理论轮廓上度量。 (T) 8、在考虑摩擦的转动副中,当匀速转动时,总反力作用线永远切于摩擦圆。 (T) 9、当机构的自由度数大于零,且等于原动件数,则该机构具有确定的相对运动。(T) 10、对于单个标准齿轮来说,节圆半径就等于分度圆半径。(F) 二、填空题;(10分) 1、机器产生速度波动的类型有(周期性)和(非周期性)两种。 2、铰链四杆机构的基本型式有(曲柄摇杆机构、双曲柄机构、双摇杆机构)三种。 3、从效率观点分析,机械自锁的条件是(效率小于零)。 4、凸轮的形状是由(从动件运动规律和基圆半径)决定的。 5当两机构组成转动副时,其瞬心与(转动副中心)重合。 三、选择题(10分) 1、为了减小机器运转中周期性速度波动的程度,应在机器中安装(B)。 A)调速器; B)飞轮; C)变速装置。
2、重合度εα = 1.6 表示在实际啮合线上有(C)长度属于双齿啮合区。 A) 60% ; B)40% ; C)75%。 3、渐开线齿轮形状完全取决于(C)。 A)压力角; B)齿数; C)基圆半径。 3、在从动件运动规律不变的情况下,对于直动从动件盘形凸轮机构,若缩小 凸轮的基圆半径,则压力角(B)。 A)保持不变; B)增大; C)减小。 5、在计算机构自由度时,若计入虚约束,则机构自由度数(B)。 A)增多; B)减小; C)不变。 四、计算作图题(共60分) (注:凡图解题均需简明写出作图步骤,直接在试卷上作图,保留所有作图线。)1、计算下列机构的自由度(10分) A B C D E F G A B C D E F G H M N 图4-1 图4-1 a) b) H F = 3×6-2×8-1=1 F = 3×5-2×6-2 = 1
通信原理练习题
通信原理练习题 2011.9.12 一、填空题 1、数字通信在信道中传输的是(),模拟通信在信道中传输的是 () 2、数字通信系统的可靠性指标为(),模拟通信系统的可靠 性指标为() 3、数字通信系统的有效性指标为(),模拟通信系统的有效 性指标为() 4、模拟信号的最高频率分量为1000Hz,对其取样后若信号频谱不混叠,则抽样频率为() 5、窄带高斯平稳随机过程的包络服从()分布,相位服从()分布。 6、信道复用是指() 7、PCM30/32 的一次群速率为() 8、PCM30/32 的每一话路的速率为() 9、PCM30/32 系统第2l 路信令码的传输位置(即在帧结构中的位置)为() 10、已知信源熵H(X ) = 3bit/符号,信源每秒钟传送100 个符号,则信源的信息传输速率() 11、某数字通信系统1 秒钟内传输了100 个码元,其中错误l 个码元,则误码率Pe 为() 12、基带传输系统的码元频带利用率最高为()。 13、在相同符号速率下,数字调制方式中频带利用率最低的是()。 14、调制器的作用是()。信道编码的作用是()。信源编码 的作用是()。PCM 的功能是()。 15、可能存在定时信号提取困难的传输码型是(),解决方案是采用 ()。 16、均匀量化是指(),缺点是()。 17、非均匀量化的特点是()。 18、在相同调制信号条件下,模拟调制系统中已调信号占用带宽最小的是()。 19、设量化级数为N=64,则码字位数为()。 20、信源发出A、B、C 三种符号,出现概率分别为1/4,1/4,1/2,则信源熵为() 比特/符号。 21、眼图是用示波器来观察()和()对通信系统性能的影响。 22、均衡的作用是()。 23、某一消息出现的概率为0.125,则该消息所含有的信息量()比特。 24、PCM30/32 路系统中,帧周期为(),一帧有()bit,系统的数 码率为(),帧同步时隙为(),信令时隙为()。 25、信道复用包括:()、()和()。 26、信源等概发出A、B、C、D 四种符号,则信源熵为()。 27、根据是否采用调制,可以将通信系统分为()传输和()传输。 频带传输是指()。基带传输是指()。 28、AM 信号的包络和调制信号成()关系。
嵌入式系统设计复习题
山东理工大学成人高等教育嵌入式系统设计复习题 一、简述题 1、画出MCS-51单片机的总线形成图,并写出地址线和数据线的数量 2、简述定时器/计数器方式1和方式2的最长定时器时间与最短定时时间(外部晶振为6MHz) 3、简述串行口的控制寄存器SCON中的SM0、SM1、SM2的含义 4、如果一个8位的D/A转换器满量程为5V,试分别确定当数字量为75H、0ACH时对应的模拟量。 5.MCS-51系列单片机三总线如何产生?说明各控制总线的名称及含义。 6.写出MCS-51单片机P3口的第二功能名称含义。 7.MCS-51单片机工作寄存器区字节地址范围是多少?若选择当前工作寄存器区为2区,应如何设置? 8.当中断控制寄存器IE的内容为92H时的含义是什么? 9.简述程序状态字PSW各位的含义。 10.MCS-51系列单片机内部有哪些主要逻辑部件组成? 11.P3口的第二功能是什么。 12.MCS-51单片机内部RAM如何分配的? 13.写出将片内RAM 30H单元、片外RAM 3000H单元的内容读入A中的指令。 14.位地址20H与字节地址20H有何区别?位地址20H具体在片内RAM中什么位置?15.写出特殊功能寄存器IE、IP、TMOD的名称及功能。 二、名词解释 1、A/D分辨率 2、中断
三、编程 1、定时器/计数器初始化编程 若要求T0作为定时器以方式1工作,定时时间为50ms; T1作为计数器以方式2工作,计3个脉冲溢出。设单片机晶振频率为12MHZ,编写初始化程序。 2、编程将片内RAM31H单元的高3位和30H单元的高5位合并为1个字节送片内RAM32H,要求31H的高3位在高位上。 3.以30H为起始地址的内部RAM中,连续存放8个单字节无符号数, 试编一程序,求其平均值送52H单元。 4.片内RAM的40H、41H单元存放2个压缩的BCD码,编制程序将其转换成七段码,并存入片内30H~33H单元中。已知七段码表的首地址为TAB。 四、设计 1、画出利用8255A管理LED3位静态显示的原理简图,并编写显示数字5、7、9的程序。 五、指令题 1.设片内RAM(30H)=0EH,执行下面程序后,(A)=?该程序完成何功能? MOV R0,#30H 答: MOV A,@R0 结果A= RL A 功能: MOV B,A RL A RL A ADD A,B RET 2.设(A)=40H,(R1)=23H,(40H)=05H。执行下列两条指令后,累加器A和R1以及内部RAM中40H单元的内容各为何值? (1)XCH A,R1 (2)XCHD A,@R1 3.设内部RAM中44H单元的内容为43H,执行下列程序后 MOV SP,#78H MOV R1,#44H
机械原理试题及答案(试卷和答案)
Print 机械原理试题及答案(试卷+答案). 仅供测试与学习交流,请下载后24小时内删除。 Array 2013年机械原理自测题(一) 一.判断题(正确的填写T,错误的填写F)(20分) 1、根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。( F ) 2、对心的曲柄滑块机构,其行程速比系数K一定等于一。( T ) 3、在平面机构中,一个高副引入二个约束。( F ) 4、在直动从动件盘形凸轮机构中,若从动件运动规律不变,增大基圆半径, 则压力角将减小( T ) 5、在铰链四杆机构中,只要满足杆长和条件,则该机构一定有曲柄存在。 ( F ) 6、滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的等距曲线。 ( T ) 7、在机械运动中,总是有摩擦力存在,因此,机械功总有一部分消耗在克服摩擦力上。( T ) 8、任何机构的从动件系统的自由度都等于零。( T ) 9、一对直齿轮啮合传动,模数越大,重合度也越大。( F ) 10、在铰链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。。( F ) 二、填空题。(10分) 1、机器周期性速度波动采用(飞轮)调节,非周期性速度波 动采用(调速器)调节。 2、对心曲柄滑块机构的极位夹角等于( 0 )所以(没有)急回 特性。 3、渐开线直齿圆柱齿轮的连续传动条件是(重合度大于或 等于1 )。 4、用标准齿条形刀具加工标准齿轮产生根切的原因是(齿条形刀具齿顶线超过极限啮合点N1 )。 5、三角螺纹比矩形螺纹摩擦(大),故三角螺纹多应用( 联接),矩形螺纹多用于(传递运动和动力)。 三、选择题(10分) 1、齿轮渐开线在()上的压力角最小。 A )齿根圆; B)齿顶圆; C)分度圆; D)基圆。 2、静平衡的转子(① )是动平衡的。动平衡的转子(②)是静平衡 的。