第1 章前言
1.1 引言
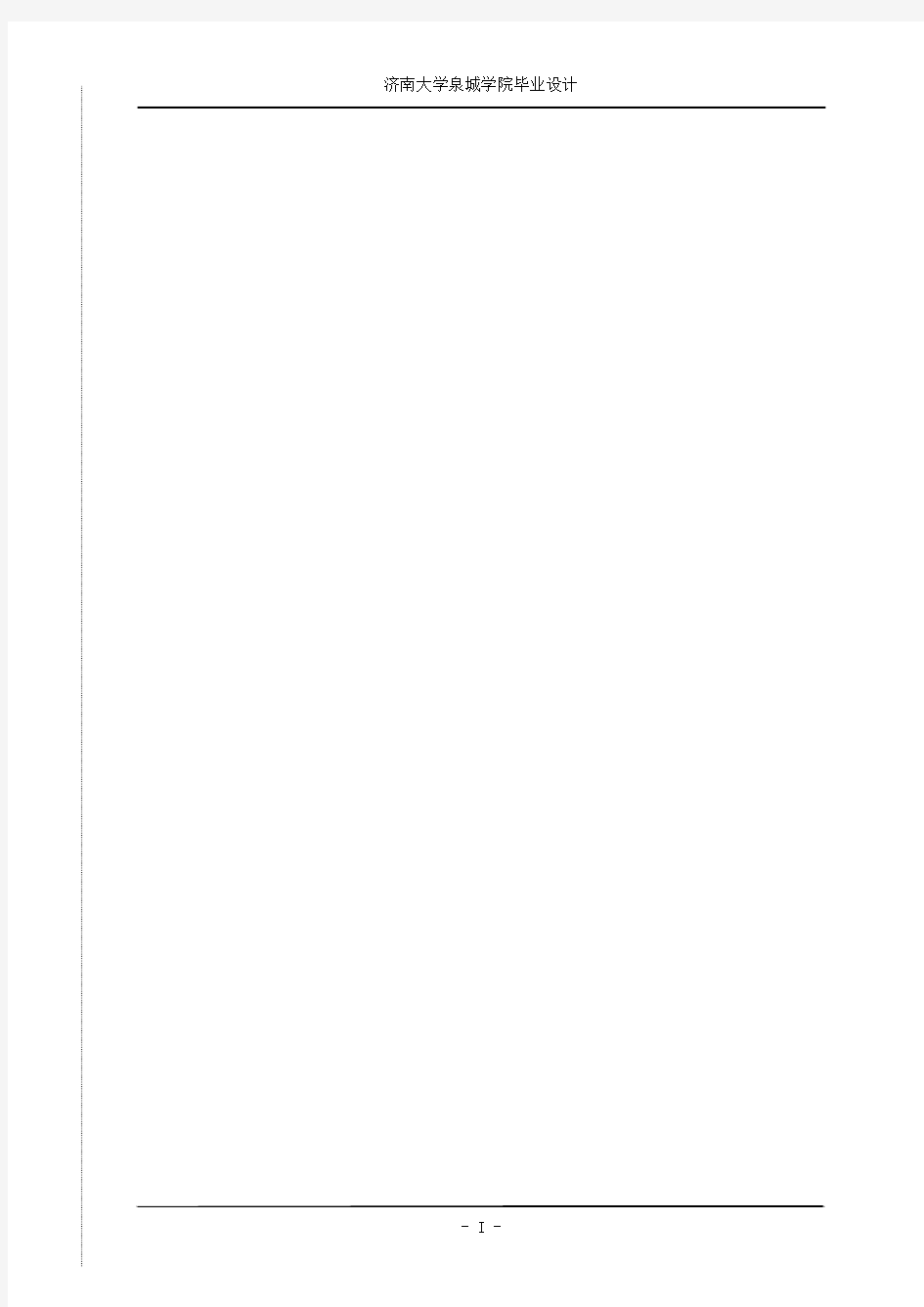
轮系传动时,有一个或几个齿轮的几何轴线位置不固定,而是绕其它齿轮的固定轴线回转,这种轮系被称作周转轮系[1],如图1.1所示。
周转轮系是由太阳轮,行星轮和行星架组成的。围绕着固定轴线回转的齿轮,称为太阳轮。如图1-1中的齿轮1和齿轮3;齿轮2围绕着自己的轴线作自转的同时又与构件H通过回转副相连一起绕着固定轴线作公转就像行星一样运动故称为行星轮。其中构件H我们称为行星架,转臂或系杆。
图1.1周转轮系
根据自由度数的不同,周转轮系可分为差动轮系和行星轮系两类。差动轮系的自由度数为2,即轮系有两个独立运动的主动件,如图1-2(a)所示;行星轮系的自由度为1,这种轮系只有一个独立运动的主动件,如图1-2(b)所示。
图1.2周转轮系
此外,周转轮系还常根据其基本构件的不同来加以分类。通常将轮系中的太阳轮以K表示,行星架以H表示,如果轮系中有两个太阳轮就称为2K-H型周转轮系,如图1-3所示:若轮系中有三个太阳轮,而行星架只是起支承行星轮的作用就称为3K 型周转轮系,如图1-4所示:轮系中只有一个太阳轮,其运动是通过等角速机构由V 轴输出就称为K-H-V行星轮系,如图1-5所示。
图1.3 2K-H型周转轮系
图1.4 3K型周转轮系
图1.5 K-H-V行星轮系
1.2 周转轮系传动发展现状
自上世纪五十年代起国内就开始对行星传动技术进行开发及应用,它的发展分为二个阶段,改革开放之前受技术水平,设计理念等因素的影响,行星传动技术处于比较低的水平,大部分行星齿轮箱仍需要从国外进口;改革开放之后随着国内科学技
术的发展,国家为推进这方面技术的发展采用与研究所,高校,企业强强联合方式,在积极引进了国外先进的行星传动技术的同时对其关键的技术进行研究突破。
当前,国内行星传动技术多采用2K-H轮系传动,已发展了许多类型的系列产品,如我国应用较为普遍的通用行星齿轮减速器系列产品(JB/T6502-1993),此外还有分别用于立磨、辊压机、铝铸轧机、矿井提升机、管磨机、风电增速箱、水电增速箱及堆取料机上的行星齿轮箱等多种型式的专用系列产品[2],如100t铸锭吊车主卷扬机行星减速器,15t转炉倾动装置差动减速器,5t电动葫芦的传动装置,50t转炉吹氧管卷扬机差动行星轮减速器。
1.3 周转轮系传动效率研究成果
近年来,国内学者一直关注着轮系传动技术的研究工作,尤其是在效率计算问题,因此当前研究的成果主要体现在以下两方面:
(1)引入理想轮系的概念[3],即轮系传动过程不考虑啮合功率损失,从而减少计算过程中繁琐数据和复杂的公式,使推导过程简单化,这样就很容易得到周转轮系的效率公式,同时根据传动效率必小于1的理论,提出不需要分析转化机构中啮合功率的流向, 便可计算效率的新方法,使效率计算变得简便和快速[4]。
(2)当考虑行星轮系啮合损失功率时,一种方法是采用啮合功率法[5],它是一种计算轮系传动效率的近似方法,但是判断啮合功率流向一直是此法的难点,可以利用周转轮系的效率、啮合功率流动方向与有关运动参数之间的关系,得到了依据周转轮系及封闭传动链的有关传动比判断啮合功率流向的简捷方法,解决了此难点问题[6] [7]。另一种方法是利用实际轮系与理想轮系之间的在输入输出之间的的差异来求导公式[8]。
1.4 论文研究的具体内容
在当前的工业生产中,对能源需求越来越大,因此能源的利用率就显的很重要,如何提高利用率就是各国都亟待解决的问题,我国提出节能减排的方针,在本次的毕业设计是关于周转轮系传动效率公式的具体推导,课题很好应用在这方面,因为周转轮系装置应用在许多的机械设备中,例如行星差动减速器就在矿上机械,起重运输,轻工化工,小型船舶,工程机械中起着无法替代的作用,利用行星轮系提高传动比来改善其性能,因此通过推导轮系的传动效率的公式,再根据已知机械设备的相关数据可以获得效率近似值,并结合具体的工作状况,找出轮系效率损失都有哪些方面,这样可以分析出相应的解决方案来提高周转轮系的效率利用率,尽量减少在传动过程尽可能减少损失,这样可以提高经济效益,减少能源的损耗。
周转轮系分为行星轮系和差动轮系,在这两种轮系下面又有许多不同的类型,由于轮系结构的复杂性以及时间的安排,不可能将所有的轮系都一一推导出效率计算公
式,因此在论文中着重对2K-H差动轮系传动效率进行具体的推导。论文的研究内容及章节安排如下:
(1) 第一章前言:
本章分为三部分,第一部分引言中对周转轮系的概念,分类和应用做一个简短的介绍,对周转轮系有一个具体的认识,知道各种构件所表达的含义,然后第二部分通过对国内有关周转轮系传动效率的研究成果的了解,从中借鉴成果中所应用到的理论知识,从而形成论文的大体研究方向。
(2) 第二章基本理论:
本章中对2K-H差动轮系公式推导中所应用到的基本理论进行详细的总结归纳,包括周转轮系的传动比怎样获得,转化轮系如何应用,周转轮系的受力分析以及效率计算,从中得出2K-H差动轮系传动方案并结合中心轮与转臂之间的角速度关系,得出组合方案,根据具体的计算和相关的约束条件,计算每一种组合方案验证合理性。
(3) 第三章2K-H差动轮系效率计算的推导:
本章中对所有合理方案进行具体的推导,根据行列式在周转轮系中的应用的理论,得出2K-H差动轮系效率计算的公式。
(4) 第四章算例:
本章针对推导出来的公式找到两个具体的算例加以验证,从而说明所求出的公式正确性。
(5) 第五章结论:
本章总结出推导2K-H差动轮系所得出的具体的结论以及相关的建议。
第二章 基本理论
2.1 引言
本章是为推导传动效率公式所用到的基本理论作一个总结归纳,包括周转轮系传动比,受力分析及效率计算的一般公式,2K-H 差动轮系传动方案三部分。
2.2 周转轮系传动比
要计算周转轮系的传动比,可以先根据定轴轮系传动比的形式来推导。
积
所有主动轮齿数的连乘积
所有从动轮齿数的连乘定轴轮系的传动比
(2.1)
周转轮系传动比不能直接用上面求定轴轮系传动比的求法来计算,因为周转轮系有转动的行星架。
因此为得出周转轮系传动比的计算公式,可以采用行星架固定法,即转化机构法,根据理论力学相对运动的原理[9],即“一个机构整体的绝对运动并不影响机构内部各构件之间的相对运动”。具体方法是给整个周转轮系加上角速度 “-H w ”即这个角速度与行星架H 角速度大小相等方向相反,这时各构件之间的相对运动保持不变,而行星架的角速度变为H w - H w =0,即行星架相对不动。于是周转轮系就转化成了定轴轮系,这样就可以用求定轴轮系传动比的公式来求周转轮系的传动比。
表2-1给整个周转轮系一个附加的角速度(-H w )后,各构件的角速度的变化
构件名称 原来角速度 在转化轮系中的角速度 (即相对于行星架的角速度)
行星架H
H w H w - H w =H
H
w =0 太阳轮a
a w
a w - H w =H w a
行星轮b
b w
b w - H w =H b
w 因此转化轮系传动比:
H ab
i = H b
H
a
w w (2.2)
其中H
ab i ——表示构件H 固定,a 主动,b 从动时的传动比
H w a ——表示构件H 固定,主动构件a 的角速度
H
b
w ——表示构件H 固定,从动构件b 的角速度 本次毕业设计是以周转轮系中的2K-H 型(H i <0)差动轮系为例来计算传动效率的简化公式。如图2.1
图2.1 2K-H 差动轮系结构简图
由上述的关于周转轮系传动比的相关论述结合2K-H (H i <0)差动轮系结构,根据公式(2.2)可以得出2K-H 差动轮系中心轮A,B 和转臂H 之间角速度的4种关系。
H
AB i
=
H
B
H
A w w =0<--H
B H A w w w w (2.3)
1)当中心轮A,B 转向相同时,且0.>>B A w w ,代入公式(2.3)可解出
H A w w >,H B w w <,整理得:0>>>B H A w w w
2) 当中心轮A,B 转向相同时,且0.>>A B w w ,代入公式(2.3)可解出
H B w w >,H A w w <,整理得: 0>>>A H B w w w
3) 当中心轮A,B 转向相反时,且0 ,,H B H A w w w w ><整理得:0,0>> 4) 当中心轮A,B 转向相反时, 且,0 ,,H A H B w w w w ><整理得:,0,0>> 2.3 周转轮系的受力分析及效率分析 2.3.1 转矩平衡方程 以2K-H 差动轮系(H i <0)为研究对象,作用于太阳轮A 上的力矩为A T ,作用于转臂H 上的阻力矩为H T ,作用于行星轮B 的力矩为B T ,根据轮系的受力平衡条件,其三个构件A,B,H 传递的扭矩必须满足(传动中的啮合损失忽略不计): 0=++H B A T T T (2.4) 2.3.2 轮系的效率计算 设周转轮系的输入件传递的功率01>P ,输出件传递的功率,02 011221 2 12=+?- =P P P P ηη (2.5) 现输入功率为11w T 、输出功率为12w T 、效率为12η,故应有以下功率平衡方程式: 0221211=+w T w T η (2.6) 同理同条件得出转化轮系传动效率的一般公式为(这里假设构件H 固定): 011221 212 =+?-=H H H H H H P P P P ηη (2.7) 0221211=+H H H w T w T βη)( (2.8) 式中:H 12η为转化机构的效率,β为反映转化机构中啮合功率流向的指数。 2.3.3 啮合功率流向 差动轮系转化机构1,2两轮传递的功率H w T 21和H w T 22叫做啮合功率[10]- [13],二者必须一正一负,当啮合功率011>H w T H w T 22<0时,轮1在转化机构中为主动件,则β=1啮合功率流由1→2;反之,当时011 2→1。 2.4 周转轮系的传动方案计算 2.4.1 2K-H 差动轮系传动方案 在周转轮系中,太阳轮和行星轮一般作为输入和输出件,它们都围绕着同一固定轴线回转。这样可以为划分构件的作用以及传动方案确定提供了一个重要的理论依据。 从图2.1可以看出2K-H 差动轮系有3个基本构件:中心轮A,B 和行星架H,因此按照输入件和输出件的分类方式得出6个不同的组合方式,即2K-H 差动轮系的传动方案。 组合方案 输入件 输出件 1 A,B H 2 A,H B 3 B,H A 4 A B,H 5 B A,H 6 H A,B 2.4.2 2K-H 差动轮系的计算 根据转矩平衡方程和功率平衡方程这2个公式可以对2K-H 差动轮系的传动方案进行相关的计算。 1)当输入件为中心轮A ,B 、输出件为转臂H 时,由式(2.4)和(2.6)可得 ()()?? ? =++=++00H H B H AB B A H AB A H B A w T w T w T T T T ηη 解之得: ()()()()H A H A B B B A H AB H B H AB H A w w T w w T w w T -= -- =-ηηη (2.9) 2)当输入件为中心轮A 、输出件转臂H 和中心轮B 时,由式(2.3)和(2.4)可得 ()()?? ? =++=++0 0B B H B AH H A B AH A H B A w T w T w T T T T ηη 解之得: ()()()()B A B AH H H A B AH B H B AH B A w w T w w T w w T -= -- =-ηηη (2.10) 3)当输入件为中心轮B ,转臂H 、输出件为中心轮A 时,由式(2.3)和(2.4)可得 ()()?? ? =++=++0 0A A H A BH H B A BH B H B A w T w T w T T T T ηη 解之得: ()()()()A B A BH H H B A BH A H A BH A B w w T w w T w w T -= -- =-ηηη (2.11) 4)当输入件为中心轮A 、输出件为中心轮B, 转臂H 时,由式(2.3)和(2.4)可得 ()?? ? =++=++00B B H H A BH A A H B A w T w T w T T T T η 解之得: ()()()A BH A B H H B A H B BH A B w w T w w T w w T ηη-= --=- (2.12) 5)当输入件为中心轮B 、输出件为中心轮A, 转臂H 时,由式(2.3)和(2.4)可得 ()?? ? =++=++00A A H H B AH B B H B A w T w T w T T T T η 解之得: ()()()A B AH B H A H B B AH B H A w w T w w T w w T -= -- =-ηη (2.13) 6)当输入件为转臂H 、输出件为中心轮A,B 时,由式(2.3)和(2.4)可得 ()?? ? =++=++00A A B B H AB H H H B A w T w T w T T T T η 解之得: ()()()H AB H A B B A H B H AB H A w w T w w T w w T ηη-= --=- (2.14) 2.4.3 2K-H 差动轮系的方案综合分析 在2K-H 差动轮系6种不同的输入输出方案下,每一种方案又会出现4种中心轮A,B 和转臂H 之间角速度的关系,这样就得出24种传动组合方案,为求出合理的效率计算简化公式,必须对方案一一进行验证。 1)中心轮A ,B 输入和转臂H 输出的关系 ()()()()H A H A B B B A H AB H B H AB H A w w T w w T w w T -= -- =-ηηη 在这种情况下,会出现4种传动方案。 当中心轮A,B 转向相同,且0.>>B A w w 时0>A T ,0>B T 和0 ()0>-B H AB H w w η ()0<-H A H AB w w η 得出: ()H AB H B w w η< ()H AB H A w w η> 因为0>>>B H A w w w ,()10< AB H A w w η> 时,满足等式,方案合理。 当中心轮A,B 转向相同, 且0.>>A B w w 时0>A T ,0>B T 和0 ()0<-B H AB H w w η ()0>-H A H AB w w η 得出: ()H AB H B w w η> ()H AB H A w w η< 因为0>>>A H B w w w ,()10< AB H B w w η> 时,满足等式,方案合理。 当中心轮A,B 转向相反,且w 0B T ,在转化轮系中 0<-=H A H A w w w ,0>-=H B H B w w w ,因此0>=H A A H A w T P ,0>=H B B H B w T P ,这与啮合 功率必须一正一负相矛盾,所以该方案不合理。 当中心轮A,B 转向相反,且w 0A T 、0 0.>-=H A H A w w w ,0<-=H B H B w w w ,因此0>=H A A H A w T P ,0>=H B B H B w T P ,这与啮合 功率必须一正一负相矛盾,所以该方案不合理。 2)中心轮A ,转臂H 输入和中心轮B 输出的关系 ()()()()B A B AH H H A B AH B H B AH B A w w T w w T w w T -= -- =-ηηη 在这种情况下,会出现4种传动方案。 当中心轮A,B 转向相同,且0.>>B A w w 时,由已知可得出输入件0>=A A A w T P ,输出 件0<=B B B w T P ,则0>A T ,0-=H A H A w w w ,0<-=H B H B w w w ,所以0>=H A A H A w T P ,0>=H B B H B w T P ,这与我假设的转化轮系输出件0 所以该方案不合理。 当中心轮A,B 转向相同, 且0.>>A B w w 时,由已知可得出输入件0>=A A A w T P ,输 出件0<=B B B w T P ,则0>A T ,0-=H B H B w w w ,所以0<=H A A H A w T P ,0<=H B B H B w T P ,这与假设的转化轮系输入件0>H A P 相违背, 所以该方案不合理。 当中心轮A,B 转向相反,且0B w ,A H B w w w >>,由已知可得出输入件 >=A A A w T P 输出件 <=B B B w T P 则 0.<-=H A H A w w w ,0>-=H B H B w w w ,所以0>=H A A H A w T P ,0<=H B B H B w T P ,与假设相 同,所以该方案合理。 当中心轮A,B 转向相反,且0A w B H A w w w >>,因为A 为输入件则此方案不合理。 3)中心轮B ,转臂H 输入和中心轮A 输出的关系 ()()()()A B A BH H H B A BH A H A BH A B w w T w w T w w T -= -- =-ηηη 在这种情况下,会出现4种传动方案。 当中心轮A,B 转向相同,且0.>>B A w w 时,0B T 和0>H T 代入上式, ()0>-H A BH A w w η ()0>-A B A BH w w η 得出: ()H A BH A B w w w >> η 根据基本运算方式可知上述不等式不成立,则该方案不合理。 当中心轮A,B 转向相同, 且0.>>A B w w 时,0B T 和0>H T 代入上式, ()0>-H A BH A w w η ()0>-A B A BH w w η 得出: ()H A BH A B w w w >> η 根据基本运算方式可知上述不等式不成立,则该方案不合理。 当中心轮A,B 转向相反,且w 0>,0>B w ,因为B 为输入件则此方案不合理。 当中心轮A,B 转向相反,且0>,,0>A w 由已知可得出输入件 >=B B B w T P 输出件 <=A A A w T P 则