机原大作业
题3-23
班级:
学号:
姓名:
指导老师:
题目
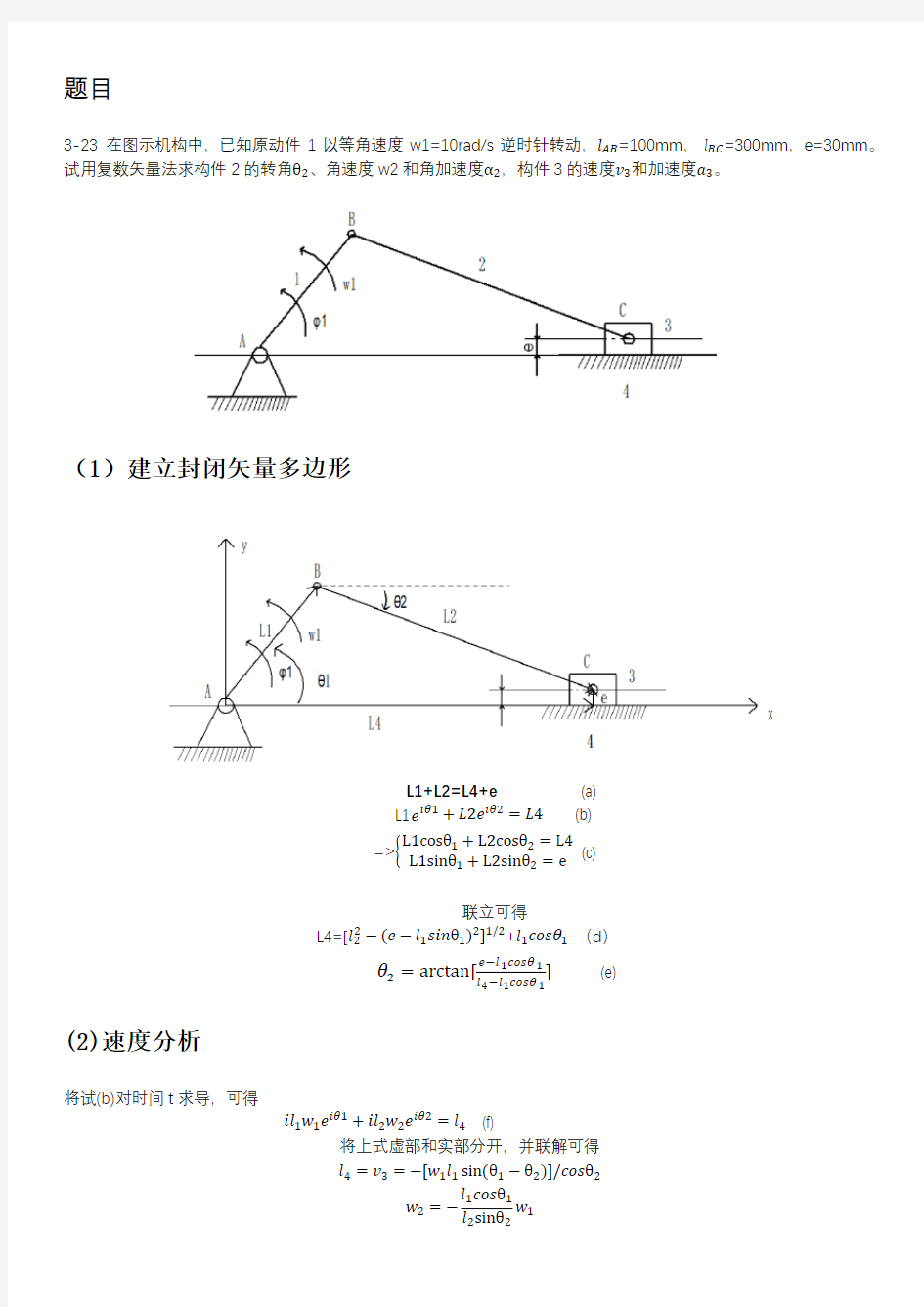
3-23 在图示机构中,已知原动件1以等角速度w1=10rad/s 逆时针转动,l AB =100mm , l BC =300mm ,e=30mm 。试用复数矢量法求构件2的转角θ2、角速度w2和角加速度α2,构件3的速度v 3和加速度a 3。
(1)建立封闭矢量多边形
L1+L2=L4+e (a) L1e iθ1+L2e iθ2=L4 (b)
=>{L1cosθ1+L2cosθ2=L4
L1sinθ1+L2sinθ2=e
(c)
联立可得
L4=[l 22
?(e ?l 1sinθ1)2]1/2+l 1cosθ1 (d )
θ2=arctan [e?l 1cosθ1
l
4?l 1cosθ1
] (e)
(2)速度分析
将试(b)对时间t 求导,可得
il 1w 1e iθ1+il 2w 2e iθ2=l 4
(f) 将上式虚部和实部分开,并联解可得 l 4
=v 3=?[w 1l 1sin (θ1?θ2)]/cosθ2 w 2=?
l 1cosθ1
l 2sinθ2w 1
(3)加速度分析
将式(f)对时间进行求导,可得
-l1w12e iθ1+il2w2e iθ1?l2w22e iθ2=l4
将上式虚部和实部分开,并联解可得
w2=α2=?(w12l1sinθ1+w22l2sinθ2)/(l2cosθ2)
l4=a3=[?w12l1cos(θ1?θ2)+w22l2]/ cosθ2
(4)程序代码(c语言)
#include
#include
#define pi 0.1745329
#define pai 3.1415926
int main()
{
double w1=10,l1=0.1,l2=0.3,e=0.03,j1=0,j2,w2,a2,v3,a3,l4;
double j2hudu;
FILE *fp;
fp=fopen("d:\\jiyuandazuoye.txt","w");
int i;
for(i=0;i<=180;i++)
{
l4=sqrt(fabs(l2*l2-((e-l1*sin(j1*pi))*(e-l1*sin(j1*pi)))))+l1*cos(j1*pi);
j2hudu=atan((e-l1*cos(j1*pi))/(l4-l1*cos(j1*pi)));
j2=pai*j2hudu;
v3=-(w1*l1*sin((j1*pi-j2hudu))/cos(j2hudu));
w2=-(l1*w1*cos(j1*pi))/(l2*sin(j2hudu));
a2=-(w1*w1*l1*sin(j1*pi)+w2*w2*l2*sin(j2hudu))/(l2*cos(j2hudu));
a3=(-w1*w1*l1*cos(pi*j1-j2hudu)+w2*w2*l2)/cos(j2hudu);
fprintf(fp,"j1=%.3f l4=%.3f j2=%.3f w2=%.3f a2=%.3f v3=%.3f a3=%.3f\n",j1,l4,j2,w2,a2,v3,a3);
j1+=2;
}
fclose(fp);
return 0;
}
(5)图像
Harbin Institute of Technology 机械原理大作业一 课程名称: 机械原理 设计题目: 连杆机构运动分析 院 系: 机电工程学院 班 级: 设 计 者: 学 号: 指导教师: 设计时间: 1.运动分析题目 (11)在图所示的六杆机构中,已知: AB l =150mm, AC l =550mm, BD l =80mm, DE l =500mm,曲柄以等角速度1w =10rad/s 沿逆时针方向回转,求构件3的角速度、角加速度和构件5的位移、速度、加速度。 2.机构的结构分析 建立以点A 为原点的固定平面直角坐标系A-x, y,如下图: 机构结构分析 该机构由Ⅰ级杆组RR (原动件1)、Ⅱ级杆组RPR (杆2及滑块3)和Ⅱ级杆组RRP (杆4及滑块5)组成。 3.建立组成机构的各基本杆组的运动分析数学模型 原动件1(Ⅰ级杆组RR ) 由图所示,原动件杆1的转角a=0-360°,角速度1w =10rad/s ,角加速度1a =0,运动副A 的位置坐标A x =A y =0,速度
(A, A),加速度 (A
, A ), 原动件1的长度AB l =150mm 。 求出运动副B 的位置坐标(B x , B y )、速度 (B
,B)和加速度 (B , B)。
杆2、滑块3杆组(RPR Ⅱ级杆组) 已出运动副B 的位置(B x , B y )、速度 (B ,B ) 和加速度
(B , B ), 已知运动副C 的位置坐标C x =0, C y =550mm,速度,加速度,杆长AC l =550mm 。 求出构件2的转角b,角速度2w 和角加速度2a . 构件二上点D 的运动
大作业1 连杆机构运动分析 1、运动分析题目 如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 2、建立坐标系 建立以点A 为原点的固定平面直角坐标系
图1 3、对机构进行结构分析 该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。 图2 图 3
图 4 4、各基本杆组运动分析的数学模型 (1)同一构件上点的运动分析: 图 5 如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ,AB 杆长 i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
=cos =280cos B i x l ??; =sin =280sin B i y l ??; = =-sin =-B xB i B dx v l y dt ω?ω; ==cos =;B yB i B dy v l x dt ω?ω 222B 2==-cos =-B xB i d x a l x dt ω?ω; 2222==-sin =-B yB i B d y a l y dt ω?ω。 (2)RRRII 级杆组的运动分析: 图 6 如图6所示是由三个回转副和两个构件组成的II 级组。已知两杆 的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。求内运动副C 的位置(C C x 、y )、速度(xC yC v 、v )、加速度(xC yC a 、a )以及两杆
机械原理大作业 This model paper was revised by the Standardization Office on December 10, 2020
机械原理大作业三 课程名称:机械原理 设计题目:齿轮传动设计 院系: 班级: 设计者: 学号: 指导教师: 设计时间: 1、设计题目 机构运动简图 机械传动系统原始参数
2、传动比的分配计算 电动机转速min /745r n =,输出转速m in /1201r n =,min /1702r n =, min /2303r n ,带传动的最大传动比5.2max =p i ,滑移齿轮传动的最大传动比4m ax =v i ,定轴齿轮传动的最大传动比4m ax =d i 。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为5.2max =p i ,滑移齿轮的传动比为321v v v i i i 、、,定轴齿轮传动的传动比为f i ,则总传动比 令 4max 1==v v i i 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数: 35,18,39,14,43,111098765======z z z z z z ;它们的齿顶高系数1=* a h ,径向间 隙系数25.0=*c ,分度圆压力角020=α,实际中心距mm a 51'=。
2- 1凸轮以匀角速度绕°轴转动,杆AB的A端搁在凸轮上。图示瞬时AB杆 处于水平位置,°A为铅直。试求该瞬时AB杆的角速度的大小及转向解:V a V e V r 其中,v e. r2e2 V a V e tg e v e 所以AB a(逆时针) 求当0时,顶杆的速度 2-2.平底顶杆凸轮机构如图所示 转动,轴0位于顶杆轴线上为 R,偏心距OC e, 顶杆AB可沿导轨上下移动, 工作时顶杆的平底始终接触凸轮表面 凸轮绕轴0转动的角速度为 偏心圆盘绕轴0 该凸轮半径 ,0C与水平线成夹角 A
(1)运动分析 轮心C 为动点,动系固结于AB ;牵连运动为上下直线平移,相对运动为与平底 平行直线,绝对运动为绕0圆周运动。 (2)速度分析,如图b 所示 V - V - V a e r 方向 丄OC 1 - 大小 ? ? y 肋二人二 v a cos H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 院系:能源学院 班级: 1302402 设计者:黄建青 学号: 1130240222 指导教师:焦映厚陈照波 设计时间: 2015年06月23日 凸轮机构设计说明书 1. 设计题目 设计直动从动件盘形凸轮机构,机构运动简图如图1,机构的原始参数如表1所示。 图1 机构运动简图 表1 凸轮机构原始参数 计算流程框图: 2. 凸轮推杆升程,回程运动方程及推杆位移、速度、加速度线图 2.1 确定凸轮机构推杆升程、回程运动方程 设定角速度为ω=1 rad/s (1) 升程:0°<φ<50° 由公式可得 )]cos(1[20 ?π Φh s -= )sin( 20 1 ?π ωπΦΦh v = )cos(20 2 2 12?π ωπΦΦh a = (2) 远休止:50°<φ<150° 由公式可得 s = 45 v = 0 a = 0 (3) 回程:150°<φ<240° 由公式得: ()()22 0000200000002200000 0,2(1)(1)1,12(1)(1),2(1)s s s s s s s s s Φhn s h ΦΦΦΦΦΦn Φn ΦΦn h n s h ΦΦΦΦΦΦn Φn n ΦΦΦn hn s ΦΦΦΦΦn Φn ??????'?=---+<≤++?'-? ???''-? =----++ <≤++???'-??? ?'---?'=-++<≤++'-?? 201 00000010002001 000 00n (),(1)(1)n ,(1)(1)n (1),(1)s s s s s s s s Φh v ΦΦΦΦΦΦn Φn ΦΦn h v ΦΦΦΦn Φn n ΦΦΦn h v ΦΦΦΦΦn ΦΦn ω??ω??ω??'=- --+<≤++?'-? ?''-? =- ++<≤++?'-? ?'---'?=--++<≤++''-?? 机械原理大作业 二、题目(平面机构的力分析) 在图示的正弦机构中,已知l AB =100 mm,h1=120 mm,h2 =80 mm,W1 =10 rad/s(常数),滑块2和构件3的重量分别为G2 =40 N和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。试用解析法求机构在Φ1=60°、150°、220°位置时各运动副反力和需加于构件1上的平衡力偶M 。 b Array 二、受力分析图 三、算法 (1)运动分析 AB l l =1 滑块2 22112112/,/s m w l a s m w l v c c == 滑块3 21113113/cos ,sin s m l w v m l s ??== 212 113/sin s m w l a ?-= (2)确定惯性力 N w l g G a m F c 2 1122212)/(== N w l g G a m F 121133313sin )/(?-== (3)受力分析 i F F i F F x R D R x R C R 43434343,=-= j F j F F R R R 232323-== j F i F j F i F F R x R y R x R R 2121121212--=+= j F F F y R x R R 414141+= 取移动副为首解副 ① 取构件3为分离体,并对C 点取矩 由0=∑y F 得 1323F F F r R -= 由0=∑x F 得 C R D R F F 4343= 由 ∑=0C M 得 2112343/cos h l F F R D R ?= ②取构件2为分离体 由0=∑x F 得 11212cos ?R x R F F = 由0 =∑y F 得 1123212sin ?F F F R y R -= ③取构件1为分离体,并对A 点取矩 由0=∑x F 得 x R x R F F 1241= 由0 =∑ y F 得 y R y R F F 1241= 由0=A M 得 1132cos ?l F M R b = 四、根据算法编写Matlab 程序如下: %--------------已知条件---------------------------------- G2=40; G3=100; g=9.8; fai=0; l1=0.1; w1=10; Fr=400; h2=0.8; %--------分布计算,也可将所有变量放在一个矩阵中求解------------------- for i=1:37 a2=l1*(w1^2); a3=-l1*(w1^2)*sin(fai); F12=(G2/g)*a2; 机械原理课程作业(一) 平面连杆机构的运动分析 (题号:1-A ) 班级 03021101 学号 姓名 成绩 同组者 完成日期 2014年1月1日 目录 一.题目及原始数据 (3) 二.平面连杆机构运动分析方程 (4) 三.计算程序框图 (6) 四.计算源程序 (7) 五.计算结果 (13) 六.运动线图分析 (17) 七.运动线图分析 (19) 八.体会及建议 (20) 九.参考书目 (20) 一. 题目及原始数据 1.如图1所示平面六杆机构,试用计算机完成其运动分析。 图1 设已知各构件的尺寸如表1所示,又已知原动件1以等角速度沿逆时针方向回转,试求各从动件的角位移、角速度、角加速度以及E 点的位移、速度、加速度的变化情况。已知其尺寸参数如下表所示: 表1 平面六杆机构尺寸参数 () mm 2、题目要求与成员组成及分工: (1)题目要求: 三人一组计算出原动件从0到360时(计算点数N=37)所要求的各运动变量的大小,并绘出运动曲线图及轨迹曲线,本组选取题号为:1—A ,1—B,1-C 组。 (2)分工比例: 学号 姓名 分工 2011300652 张正栋 报告书写,制图、程序 2011300620 肖川 制图 2011300622 尹志成 方程推导 组号 1l l 2 l 3 l 4 l 5 l 6 α A B C 2-A 2-B 3-C 26.5 67.5 87.5 52.4 43 600 l 2=116.6 l 2=111.6 l 2=126.6 二. 平面连杆机构运动分析方程 1. 位置方程 在图1的直角坐标系中,建立该六杆机构的封闭矢量方程: 将上式写成在两坐标轴上的投影式,并改写成方程左边尽含未知量的形式,即得 1122334112233' 1122226655'1122226655 cos cos cos sin sin sin cos cos cos()cos cos sin sin sin()sin sin G G L L L L L L L L L L x L L L L L y L L θθθθθθθθπαθθθθθπαθθθ??+?=?+? ?+?=?? ??+?-?-+=-?-????+?-?-+=-?-??将上式化简可得: 2233411223311' 222255664'22225566cos cos cos sin sin sin cos cos()cos cos sin sin()sin sin G G L L L L L L L L L L L x L L L L L y θθθθθθθθαθθθθαθθ??-?=-?? ?-?=-?? ??+?-+?+?=-???+?-+?+?=? 由以上各式即可得。 2. 速度方程 根据A ω=ω1B ,可得 222333111222333111'2222 22555666'222222555666sin sin sin cos cos cos sin sin()sin sin 0cos cos()cos cos 0L L L L L L L L L L L L L L θωθωθωθωθωθωθωθαωθωθωθωθαωθωθω?-??+??=??? ??-??=-??? ?-??-?-?-??-??=????+?-?+??+??=?化为矩阵形式为: 2233 22233 3'2 22255 665'2222 55 666111111111sin sin 00 cos cos 00sin()sin 0sin sin cos()cos 0 cos cos sin cos sin cos L L L L L L L L L L L L L L L L θθωθθωθαθ θθωθαθθθωθθωθθ?? ?? -??? ????-?? ????????-?--?-?-??????????-+????? ?????-??=????-????? ?? ??? 3. 加速度方程 机械原理大作业三 课程名称: 机械原理 级: 者: 号: 指导教师: 设计时间: 1.2机械传动系统原始参数 设计题目: 系: 齿轮传动设计 1、设计题 目 1.1机构运动简图 - 11 7/7777777^77 3 UtH TH7T 8 'T "r 9 7TTTT 10 12 - 77777" 13 ///// u 2 电动机转速n 745r/min ,输出转速n01 12r/mi n , n02 17r /mi n , n°323r/min,带传动的最大传动比i pmax 2.5 ,滑移齿轮传动的最大传动比 i vmax 4,定轴齿轮传动的最大传动比i d max 4。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实 现。设带传动的传动比为i pmax 2.5,滑移齿轮的传动比为9、心、「3,定轴齿轮传动的传动比为i f,则总传动比 i vi i vmax 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、 7、8 9和10为角度变位齿轮,其齿数: Z5 11,Z6 43,Z7 14,Z8 39,Z9 18,乙。35 ;它们的齿顶高系数0 1,径向间隙 系数c 0.25,分度圆压力角200,实际中心距a' 51mm。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:Z11 z13 13,乙 2 z14 24。它们的齿顶高系数d 1,径向间隙系数c 0.25,分度圆压力角200,实际中心距 a' 46mm。圆锥齿轮15和16选择为标准齿轮令13,乙 6 24,齿顶高系数 h a 1,径向间隙系数c 0.20,分度圆压力角为200(等于啮合角’)。 4、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算 4.1滑移齿轮5和齿轮6 机械原理大作业一 课程名称:机械原理 设计题目:连杆机构及其分析 院系:机械设计制造及其自动化 班级:1208104 完成者:郑鹏伟 学号:1120810416 指导教师:林琳刘福利 设计时间:2014.6.3 哈尔滨工业大学 一.运动分析题目 如图 1-14 所示的矿石破碎机,已知各构件尺寸为: A B B C C D B E E F l 100m m ,l 460m m ,l 250m m , l 460m m ,l m,======D D G G x 300m m ,y 500m m ,x 430m m ,y 210m m ,3 δ== = ==试求构件5的角位移、角 速度、和角加速度。 二.机构结构分析、组成机构的基本杆组划分 1.计算机构的自由度 L H F 3n 2p p 35271=?-?-=?-?= 2.建立直角坐标系 以D 为原点建立直角坐标系 :D(0,0) ,A(-300,500),G(-730,210) 3.对机构进行结构分析: 该机构由一个RR 杆组(原动件AB )和三个RRR 杆组(BCD 、BEC 、EFG )组成,各基本杆组运动分析数学模型见下图: 三.计算编程(VB ): Private f1(3600) As Double '1杆的转角 Private xB(3600) As Double 'B 点的 x 位移 Private yB(3600) As Double 'B 点的 y 位移 Private vxB(3600) As Double 'B 点的 x 速度 Private vyB(3600) As Double 'B 点的 y 速度 Private axB(3600) As Double 'B 点的 x 加速度 Private ayB(3600) As Double 'B 点的 y 加速度 Private xC(3600) As Double 'C 点的 x 位移 Private yC(3600) As Double 'C 点的 y 位移 Private vxC(3600) As Double 'C 点的 x 速度 Private vyC(3600) As Double 'C 点的 y 速度 Private axC(3600) As Double 'C 点的 x 加速度 Private ayC(3600) As Double 'C 点的 y 加速度 Private xE(3600) As Double 'E 点的 x 位移 第六章点的合成运动 一、是非题 1、不论牵连运动的何种运动,点的速度合成定理v a=v e+v r皆成立。() 2、在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相对加速度的矢量和。() 3、当牵连运动为平动时,相对加速度等于相对速度对时间的一阶导数。() 4、用合成运动的方法分析点的运动时,若牵连角速度ωe≠0,相对速度υr≠0,则一定有不为零的科氏加速度。() 5、若将动坐标取在作定轴转动的刚体上,则刚体内沿平行于转动轴的直线运动的动点,其加速度一定等于牵连加速度和相对加速度的矢量和。() 6、刚体作定轴转动,动点M在刚体内沿平行于转动轴的直线运动,若取刚体为动坐标系,则任一瞬时动点的牵连加速度都是相等的。() 7、当牵连运动定轴转动时一定有科氏加速度。() 8、如果考虑地球自转,则在地球上的任何地方运动的物体(视为质点),都有科氏加速度。() 二、选择题 1、长L的直杆OA,以角速度ω绕O轴转动,杆的A端铰 接一个半径为r的圆盘,圆盘相对于直杆以角速度ωr,绕A轴 转动。今以圆盘边缘上的一点M为动点,OA为动坐标,当AM 垂直OA时,点M的相对速度为。 ①υr=Lωr,方向沿AM; ②υr=r(ωr-ω),方向垂直AM,指向左下方; ③υr=r(L2+r2)1/2ωr,方向垂直OM,指向右下方; ④υr=rωr,方向垂直AM,指向在左下方。 2、直角三角形板ABC,一边长L,以匀角速度ω绕B轴转动,点M以S=Lt的规律自A向C运动,当t=1秒时,点M的相对加速度的大小α r= ;牵连加速度的大小αe = ;科氏 加速度的大小αk = 。方向均需在图中画出。 ①Lω2; ②0; ③3Lω2; Harbin Institute of Technology 机械原理设计说明书 课程名称:机械原理 设计题目:连杆机构运动分析 指导老师:陈明丁刚 班级: 设计者: 学号: 指导教师: 设计时间: 一、运动分析题目 如图1-6所示是曲柄滑块机构,各构件长度分别为a 、b ,偏距为e ,连杆BC 上一点到铰链B 的距离为l m ,试研究各构件长度a 、b 、l m 及偏距e 的变化对点m 的轨迹的影响规律。 二、机构结构分析及基本杆组划分 1.除去虚约束力和局部自由度,计算机构的自由度并确定原动件 本机构中无虚约束或局部自由度。机构各杆件都在同一平面运动,活动构件数n=3,P L =4,P H =0,则机构的自由度为:F=3n-2P L -P H =33-24-10=1。原动件为曲柄AB 。 2.拆分杆组 从远离原动件(即杆AB ,如图1)进行拆分,可得到由杆BC 和C 点处滑块组成的RRP Ⅱ级杆组(如图2),剩下的就是Ⅰ级机构杆AB 。 3.确定机构的级别 由上可知,机构为Ⅱ级机构 三、各基本杆组的运动分析数学模型 (1)原动件AB (Ⅰ级杆组) ????? 原动件AB 的转角为:i ?=0~2π;角速度为:s rad /101=ω 角加速度为:01=ε 假定运动副A 的位置坐标为:x A =0,y A =0 A 点与机架相连,即该点的速度和加速度都为0。原动件AB 长度为l i ,从而可求得运动副B 点的位置坐标: i ?cos l x x i A B +=,i i A B l y y ?sin += (2)杆BC 和C 点的滑块(RRP Ⅱ级杆组) RRP Ⅱ级杆组是由两个构件两个转动副及一个外移动副组成的。 已知两杆长为l i 和l j (l j 杆垂直于滑块导路),外回转副B 的参数,滑块导路方向角和计算位移时的参考点K 的位置和导路的运动参数,求内运动副C 的运动参数。 位置方程:内回转副C 的位置方程为: j j j K i i B C j j j K i i B C l s y l y y l s x l x x ??????cos sin sin sin cos cos ++=+=-+=+= 消去s 可得:j i j i l l A ??++=0a r c s i n 其中 j K B j K B y y x x A ??c o s )(s i n )(0---= 为保证机构的存在,应满足装配条件i j l l A ≤+0,求得 i ?后,可求得x C 和y C ,而后求得滑块的位移s : j j j K C j j j K C l y y l x x s ????sin /)cos (cos /)sin (--=+-= 滑块D 点的位移方程为: j K D j K D s y y s x x ??sin cos +=+= (3)求M 点位置坐标 要画出点m 的轨迹图,需要求出点m 的位置坐标。假定以A 点为原点,则点B 的位置坐标为: 1 1sin cos ααa y a x B B == 点C 的位置坐标为: e y b a x C C =+=21cos cos αα 而点m 是杆BC 上的一点,且到B 点的 距离为l m ,则B,C,m 三点满足关系:C B m B B C B m m y y y y x x x x b l --=--= 从而求得m 点的位置 1.建立封闭图形: → → → → +=+EC AE BC AB 1 → →→=+AD L L 21 2.机构运动分析: (1)角位移分析 由图形封闭性得: 321cos cos cos θθθEC X BC AB e +=+ 321sin sin sin θθθEC Y BC AB e +=+ d X CD BC AB =+-+)cos(cos cos 221βθθθ d Y CD BC AB =+-+)sin(sin sin 221βθθθ (2)角速度分析 对上式求时间的一阶导数,可得速度方程: 113322sin sin sin ωθωθωθAB EC BC =+- 113322cos cos cos ωθωθωθAB EC BC -=- 112222sin )sin(sin ωθωβθωθAB V CD BC dx =-++- 112222cos )cos(cos ωθωβθωθAB V CD BC dy -=-+- 化为矩阵形式得: ?????? ??? ???-=??? ?????????????????? ?? ??? -+---+--11111 3222223232cos sin cos sin 100) cos(cos 010sin )sin(00 cos cos 00 sin sin θθθθωωωβθθθβθθθθθAB V V CD BC BC CD EC BC EC BC dy dx (3)角加速度分析 (4)矩阵对时间求一阶导数,可得加速度矩阵 = ??? ?? ?? ?????????????? ?? ??? -+---+--dy dx a a CD BC BC CD EC BC EC BC 3222223232100)cos(cos 010sin )sin(00cos cos 00 sin sin εεβθθθβθθθθθ ? ????? ??? ???-+?????? ??????????????? ?? ??? ++--+--111121 2 2 2 3 2 2 22223232cos sin cos sin 000) sin(sin 000cos )cos(00sin sin 00cos cos θθθθωωωβθθθβθθθθθdy dx V V CD BC BC CD EC BC EC BC 3.拆分基本杆组 连杆的运动的分析 一.连杆运动分析题目 图1-13 连杆机构简图 二.机构的结构分析及基本杆组划分 1.。结构分析与自由度计算 机构各构件都在同一平面内活动,活动构件数n=5, PL=7,分布在A、B、C、E、F。没有高副,则机构的自由度为 F=3n-2PL-PH=3*5-2*7-0=1 2.基本杆组划分 图1-13中1为原动件,先移除,之后按拆杆组法进行拆分,即可得到由杆3和滑块2组成的RPR II级杆组,杆4和滑块5组成的RRP II级杆组。机构分解图如下: 图二 图一 图三 三.各基本杆组的运动分析数学模型 图一为一级杆组, ? c o s l A B x B =, ? sin lAB y B = 图二为RPR II 杆组, C B C B j j B E j B E y y B x x A A B S l C E y x S l C E x x -=-==-+=-+=0000 )/a r c t a n (s i n )(c o s )(?? ? 由此可求得E 点坐标,进而求得F 点坐标。 图三为RRP II 级杆组, B i i E F i E F y H H A l E F A l E F y y l E F x x --==+=+=111)/a r c s i n (s i n c o s ??? 对其求一阶导数为速度,求二阶导数为加速度。 lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0; yC=-350; A0=xB-xC; B0=yB-yC; S=sqrt(A0.^2+B0.^2); zj=atan(B0/A0); xE=xB+(lCE-S)*cos(zj); yE=yB+(lCE-S)*sin(zj); a=0:0.0001:20/255; Xe=subs(xE,t,a); Ye=subs(yE,t,a); A1=H-H1-yB; zi=asin(A1/lEF); xF=xE+lEF*cos(zi); vF=diff(xF,t); aF=diff(xF,t,2); m=0:0.001:120/255; xF=subs(xF,t,m); vF=subs(vF,t,m); aF=subs(aF,t,m); plot(m,xF) title('位移随时间变化图像') xlabel('t(s)'),ylabel(' x') lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0; 连杆机构的运动分析 一.题目 如图所示是曲柄摇杆机构,各构件长度分别为a,b,c,d,试研究各构件长度的变化对机构急回特性的影响规律。 二.机构分析 四连杆机构可分为如下两个基本杆组 Ⅰ级杆组 RRRⅡ级杆组 AB为曲柄,做周转运动;CD为摇杆,做摆动运动; BC为连杆;AB,CD均为连架杆,AB为主动件。 三.建立数学模型 θ为极位夹角,φ为最大摆角 必须满足条件为:1.a≤b,a≤c,a≤d(a为最短杆); 2.L min+L max≤其他两杆之和。 下面分析杆长和极位夹角的关系: 在△AC2B中, =; 在△AC1B中, =。 θ=- K= 最后分以下四种情况讨论: 1.机架长度d变化 令a=5,b=30,c=29 d由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 2.连杆长度b变化 令a=5,b=29,d=30 b由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 3.摇杆长度c变化 令a=5,b=29,d=30 c由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 4.曲柄长度a变化 令b=29,c=28,d=30 a由5开始变化至27,步长为1 输出杆长a,b,c,d和K。 四.MATLAB计算编程a=5;b=30;c=29; d=6:1:54; m=(d.^2-216)./(50.*d); n=(384+d.^2)./(70.*d); p=acos(m); q=acos(n); w=p-q; o=(w.*180)/3.14; K=(180+o)./(180-o); fprintf('%.6f\n',K); plot(d,K,'b') xlabel('机架长度d变化时 '); ylabel('极位夹角/度'); tilte('极位夹角变化图'); ———————————————————————————————————— ——— a=5;d=30;c=29; b=6:1:54; m=((b-5).^2+59)./(60.*(b- 5)); n=(59+(b+5).^2)./(60.*(b+ 5)); p=acos(m); q=acos(n); w=p-q; o=(w.*180)/3.14; K=(180+o)./(180-o); fprintf('%.6f\n',K); plot(b,K,'b') xlabel('连杆长度b变化时'); ylabel('极位夹角/度'); tilte('极位夹角变化图'); ※第四节 牵连运动为转动时点的加速度合成定理 。 取动点为小球M ,动系固结于圆盘,定系固 结于地面。动点M 的的相对运动为匀速率圆周运 动,相对速度为r v ,故相对加速度r a 的大小为 r v a a r n r r 2 == (a ) 方向指向圆心O 。牵连运动是圆盘以匀角速度e ω绕O 轴转动,故动点M 的牵连速度e v 的大小为 r v e e ω=,方向与r v 一致;牵连加速度e a 的大小 为 2e n e e r a a ω== (b ) 方向也指向圆心O 。由于r v 和e v 方向相同,故点M 的绝对速度的大小为 =+=+=r e r e a v r v v v ω常数 可见,动点M 的绝对运动也是也是匀速圆周运动,于是M 的绝对加速度a a 的大小为 ()r e r e r e a n a a v r v r r v r r v a a ωωω22222++=+=== (c ) 方向也是指向圆心O 。考虑到(a )、(b )两式,有 r e r e a v a a a ω2++= (d ) 从上式可以看出,动点的绝对加速度除了牵连加速度和相对加速度两项外,还多了一项r e v ω2,可见牵连运动为转动时,动点的绝对加速度并不等于牵连加速度与相对加速度的矢量和,而多出的一项与牵连转动e ω和相对速度r v 有关,多出的这一项称为科氏加速度。 牵连运动为转动时点的加速度合成定理为:牵连运动为转动时,动点在某瞬时的绝对加速度等于该瞬时它的牵连加速度、相对加速度与科氏加速度的矢量和。即 C r e a a a a a ++= (14-7) 式中a c 为科氏加速度,它等于动系角速度矢与点的相对速度矢的矢积的两倍,即 r e C v ωa ?=2 (14-8) 刚体的角速度矢的模等于角速度的大小,其方位沿刚体的转轴, 指向用右手螺旋法则来确定(右手四指代表角速度的转向,拇指表示 角速度矢的指向)。 C a 的大小为 θωsin 2r e C v a = 其中θ为e ω与r v 两矢量间的最小夹角。矢C a 垂直于e ω与r v ,指向按 右手法则确定,如图14-11所示。 当e ω与r v 平行时( 0=θ或180°),0=C a ;当e ω与r v 垂直时,r e C v a ω2=。常见的平面机构中,e ω与r v 是相互垂直的,此时r e C v a ω2=;且r v 按e ω转向转过90°就是C a 的指向。 科氏加速度是由于牵连运动为转动时,牵连运动与相对运动相互影响而产生的。 图 14-11 图 14-10 1、运动分析题目 如图1-18所示机构,已知机构各构件的尺寸为? = 90°,AB = 108mm,AD = 266mm,DG = 278mm,EF = FG = 114mm,BC = CE = CD = 200mm,构件1的角速度为w1 = 10rad/s,试求构件2上的E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 图1-18 2、建立坐标系 以A点为坐标原点,杆AD所在的直线为X轴,垂直于AD的直线为Y轴,建立直角坐标系,如下图2所示: 图2 3、对机构进行结构分析 该机构由1个I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RRR(杆4、杆5)组成。 4、各基本杆组的运动分析数学模型 (1)原动件杆1(Ⅰ级杆组RR) 如图3所示 图3 Ⅰ级杆组RR 已知原动件杆1 的转角φ = 0~360°,角速度ω1 = 10rad/s,角加速度α1 = 0 转动副A 的位置坐标X A=0,Y A=0;速度X A’= 0,Y A’= 0;加速度X A”= 0,Y A”= 0 原动件杆1 的 长度L AB = 100mm, 可求转动副B 的位置坐标(X B,Y B),速度(X B’, Y B’)和角加速度(X B”, Y B”); (2)杆2 和杆3(Ⅱ级杆组RRR) 如图4所示: 图4 Ⅱ级杆组RRR 由于BC = CE = CD = 200mm,所以,可以根据几何关系求出杆2与X轴之间的夹角Ψ,B 的位置坐标(X B,Y B);速度(X B’,Y B’);角加速度(X B’’,Y B’’)杆2 的长度L BE = 400mm,杆3的长度为L CD = 200mm。 可求点E的位置坐标(X E,Y E),速度(X E’,Y E’)和角加速度(X E’’,Y E’’);(3)杆4 和杆5(Ⅱ级杆组RRR) 如图5所示 图5 Ⅱ级杆组RRR 已知点E的位置坐标(X E,Y E),速度(X E’,Y E’)和角加速度(X E’’,Y E’’),EF = FG = 114mm,G点的坐标为(-266,278);速度X G’=0,Y G’=0;加速度X G’’=0,Y G’’=0,可求杆5 的角位移θ,角速度ω 及角加速度α。 5、计算编程 第五章 点的合成运动 本章要点 一、绝对运动、相对运动和牵连运动 一个动点, 两个参照系: 定系,动系; 三种运动:绝对运动、相对运动和牵连运动, 包括三种速度:绝对速度、相对速度和牵连速度; 三种加速度:绝对加速度、相对加速度和牵连加速度; 牵连点:动参考系上瞬时与动点相重合的那一点称为动参考系上的牵连点。 二、速度合成定理 动点的绝对速度,等于它在该瞬时的牵连速度与相对速度的矢量和,即 r e a v v v += 解题要领 1 定系一般总是取地面,相对定系运动的物体为动系,动点不能在动系上. 2 牵连速度是牵连点的速度. 3 速度合成定理中的三个速度向量,涉及大小方向共六个因素,能且只能存在两个未知数方能求解,因此,至少有一个速度向量的大小方向皆为已知的. 4 作速度平行四边形时,注意作图次序:一定要先画大小方向皆为已知的速度向量,然后再根据已知条件画上其余两个速度向量,特别注意,绝对速度处于平行四边形的对角线位置. 5 用解三角形的方法解速度合成图. 三、加速度合成定理 1 牵连运动为平移时的加速度合成定理 当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和,即 r e a a a a +=, 当点作曲线运动时,其加速度等于切向加速度和法向加速度的矢量和,因此上式还可进一步写成 n r t r n e t e n a t a a a a a a a +++=+ 其中 t v a d d a t a =,a 2a n a ρv a =,t v a d d e t e =,e 2e n e ρv a =,t v a d d r t r =,r 2r n r ρv a =,r e a ,,ρρρ依次为绝 对轨迹、牵连轨迹和相对轨迹的曲率半径。 机械原理大作业三 课程名称:机械原理 设计题目:齿轮传动系统设计 院系:能源学院 班级:1602404 完成者:原辰宇 学号:1160200409 指导教师:林琳 设计时间:2018年12月25日 哈尔滨工业大学 一:设计题目 二、传动比的分配计算 电动机转速n=745r/min,输出转速n1=40 r/min,n2=35 r/min,n3=30 r/min,带传动的最大传动比=2.5,滑移齿轮传动的最大传动比=4,定轴齿轮传动的最大传动比=4。 根据传动系统的原始参数可知,传动系统的总传动比为 =745/40=18.625 =745/35=21.286 =745/30=24.833 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为,滑移齿轮的传动比为、和,定轴齿轮传动的传动比为,则总传动比 令=4 则可得定轴齿轮传动部分的传动比为 = =2.4833 滑移齿轮传动的传动比= =3.0000 ==3.4287 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 =4 三、齿轮齿数的确定 3.1 滑移齿轮传动齿数的确定 根据传动比符合的要求,中心距必须相同,齿数最好互质,不能产生根切以及尺寸尽可能小等一系列原则,初步确定滑移齿轮5,6为高度变位齿数分别为: 17,= 50,齿轮7,8,9,10均为角度变位齿轮,齿数分别为15, 51,13,53它们的齿顶高系数=1,径向间隙系数=0.25,分度圆压力角=20°,实际中心距 '=67mm。 3.2定轴传动齿轮齿数的计算 根据定轴齿轮变速传动系统中传动比符合的要求,以及齿数最好互质,不能产生根切以及尺寸尽可能小等一系列原则,可大致选择齿轮11、12、13和14为高度变位齿轮,其齿数:=17,23。它们的齿顶高系数=1,径向间隙系数=0.25,分度圆压力角=20°。圆锤齿轮15和16选择为标准齿轮17,23,齿顶高系数=1,径向间隙系数=0.2,分度圆压力角=20°。 四、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算 机械原理大作业(一) 作业名称:连杆机构运动分析 设计题目:第八题 院系: 班级: 设计者: 学号: 指导教师:陈明 设计时间: 2013年06月20日 哈尔滨工业大学机械设计 一、题目 图1—8所示是曲柄转动导杆机构,BC的长度为a,机架AC的长度为d。试研究当BC 为主动件时,a、d的长度变化对从动件的角位移、角速度和角加速度的影响规律 ;当导杆为主动件时,a、d的长度变化对从动件BC的角位移、角速度和角加速度的影响规律。 C 二、机构的结构分析 机构可分为两部分 (1)、RPR杆组 (2)、刚性杆 三、各基本杆组的运动分析数学模型并建立直角坐标系 1、当AB为主动件时 设角BAC为wt,w为角速度、t为时间、n为角BCA。由正弦定理可得a/sin(wt)=b/sin(n+wt) 可推出 从动件的角位移n=arcsin(d*sin(w*t)/a)-w*t,,对其求导可得 从动件的角速度v=(d*t*cos(t*w))/(a*(1 - (d^2*sin(t*w)^2)/a^2)^(1/2)) – t,再对v求导得从动件的角加速a1=(d^3*t^2*cos(t*w)^2*sin(t*w))/(a^3*(1 - (d^2*sin(t*w)^2)/a^2)^(3/2)) - (d*t^2*sin(t*w))/(a*(1 - (d^2*sin(t*w)^2)/a^2)^(1/2))。 2、当BC为主动件时 设角BCA为w`t`,w`为角速度、t`为时间、n`为角BAC。由正弦定理可得从动件的角位移n`=arctan(asin(w`*t`)/(d-a*cosw`*t`)), 从动件的角速度v`= (t`/((d - a*cos(t`*w`))*(1 –t`^2*w`^2)^(1/2)) - (a*t`*asin(t`*w`)*sin(t`*w`))/(d - a*cos(t`*w`))^2)/(asin(t`*w`)^2/(d - a*cos(t`*w`))^2 + 1)。 从动件的角加速度a1`= ((t^3*w)/((d - a*cos(t*w))*(1 - t^2*w^2)^(3/2)) + (2*a^2*t^2*asin(t*w)*sin(t*w)^2)/(d - a*cos(t*w))^3 - (a*t^2*asin(t*w)*cos(t*w))/(d - a*cos(t*w))^2 - (2*a*t^2*sin(t*w))/((d - a*cos(t*w))^2*(1 - t^2*w^2)^(1/2)))/(asin(t*w)^2/(d - a*cos(t*w))^2 + 1) - ((t/((d - a*cos(t*w))*(1 - t^2*w^2)^(1/2)) - (a*t*asin(t*w)*sin(t*w))/(d - a*cos(t*w))^2)*((2*t*asin(t*w))/((d - a*cos(t*w))^2*(1 - t^2*w^2)^(1/2)) - (2*a*t*asin(t*w)^2*sin(t*w))/(d - a*cos(t*w))^3))/(asin(t*w)^2/(d - a*cos(t*w))^2 + 1)^2。 五、计算编程 1、AB为主动件 假设w=10rad/s、d=100mm、a=0+1*p,p从1到1000,步长为10,即d/a的取值范围为0.1—100。 1.1、求从动件的角位移程序为 for p=0.1:10:100哈工大机械原理大作业凸轮 - 黄建青
机械原理大作业
机械原理大作业平面连杆机构
机械原理大作业
机械原理大作业一-连杆传动机构分析
理论力学点的合成运动
哈工大机械原理大作业——连杆——24号
机械原理大作业-连杆设计(32题)
哈工大机械原理大作业
机械原理大作业一
第四节 牵连运动为转动时点的加速度合成定理
机械原理大作业1连杆机构(18题)
第5章点的合成运动习题解答080814
哈尔滨工业大学2018年机械原理大作业齿轮第21题
机械原理大作业1
相关主题
文本预览