
1 起升机构方案的选择
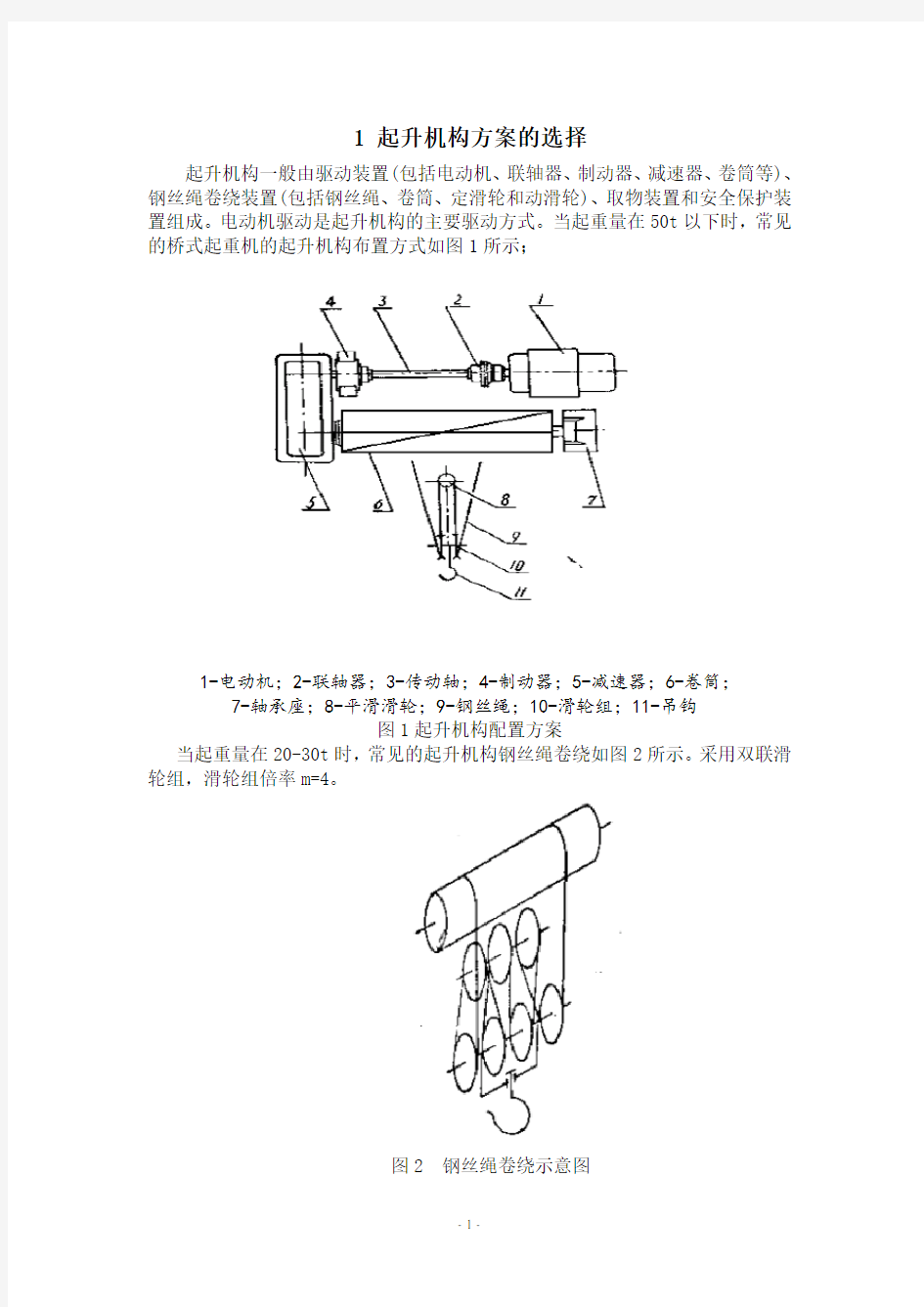
起升机构一般由驱动装置(包括电动机、联轴器、制动器、减速器、卷筒等)、钢丝绳卷绕装置(包括钢丝绳、卷筒、定滑轮和动滑轮)、取物装置和安全保护装置组成。电动机驱动是起升机构的主要驱动方式。当起重量在50t以下时,常见的桥式起重机的起升机构布置方式如图1所示;
1-电动机;2-联轴器;3-传动轴;4-制动器;5-减速器;6-卷筒;
7-轴承座;8-平滑滑轮;9-钢丝绳;10-滑轮组;11-吊钩
图1起升机构配置方案
当起重量在20-30t时,常见的起升机构钢丝绳卷绕如图2所示。采用双联滑轮组,滑轮组倍率m=4。
图2 钢丝绳卷绕示意图
2 起升机构设计计算
2.1 钢丝绳、滑轮和卷筒直径的确定 2.1.1 钢丝绳的计算与确定
采用双联滑轮组,按t Q 20=,查取滑轮组倍率m =4; 钢丝绳所受最大拉力(载荷):
N Z P S Q 26020
98.08204000
max =?=
=
滑
η
(式1) 式中 Q P ——最大载荷,
()()N g Q Q P G Q 2040001040020000=?+=+=
其中 kg Q Q G 40002.0==;
Z ——悬挂吊重的钢丝绳分支数,8422=?==m Z ; 滑η——滑轮组效率,滑η=0.98; 所选钢丝绳的直径应满足:
max S C d ≥ (式2) 260201.0=
mm 1.16=
式中 d ——钢丝绳直径;
m ax S ——钢丝绳最大静工作拉力;
C ——选择系数,根据《起重机械》表2-4,()
N mm C /1.0=; 取钢丝绳直径mm d 18=,捻向:交互捻;选择钢丝绳型号为: 178167019618ZS S NAT +? 119 19968918/-T GB
2.1.2 滑轮和卷筒直径的确定
按钢丝绳中心来计算滑轮与卷筒的最小直径:
hd D =min ; (式3) 式中 min D ——按钢丝绳中心计算的滑轮和卷筒的最小直径;
d ——钢丝绳直径;
h ——与机构工作级别和钢丝绳结构有关的系数,根据《机械设计手册》
表8.1-61,对滑轮1h =20,对卷筒2h =18;
根据(式1-3),得
滑轮 mm d h D 36018202min =?==;
取动滑轮直径(滑轮槽底直径)mm D 450=,平衡滑轮()D D 8.0~6.0=平。取
mm D D 3604508.08.0=?==平。
卷筒 mm d h D 32418181min =?==;
2.2 吊钩滑轮组的选择和验算 2.2.1.吊钩的选择
吊钩尾部螺纹直径的确定, []σπ??σ≤=
=
2
1
224d P F
P Q
Q
[]
75
.5814.3204000
09.14421???=
≥
σπ?Q
P d
mm 4.69= (式4) 式中 Q P ——最大其中载荷;
2?——起动动载系数,由《起重机械》表1-9确定 09.12=?; F ——螺纹根部面积; 1d ——螺纹根部直径; []σ——许用应力,[]n
s
σσ=
,4=n ;选等级强度为M ,则a s MP 235=σ,
[]a MP 75.58=σ;
采用短型吊钩组,根据额定起重量t Q 20=和工作类型M5来选择直柄单钩LM16 —MGB/T10051.1—1988,吊钩材料为DG20,螺纹外径mm d 80=,螺纹根部直径mm d 691=。
2.2.2 吊钩螺母的计算
螺母高度不得小于H ,
()
()
mm d d t
P H Q 51.830
69-803.1410
2000004422212=????=
-=
π (式5)
式中 t=10mm ——螺距;
p ——许用挤压应力,钢对钢MPa p 35~30=(螺母材料45号钢)
;
公制螺母的高度 mm d 96802.11.2H =?==; 考虑放止动垫片的尺寸取螺母高度:mm 100H =;
螺母外径:mm d D 144801.8 1.8=?==外。
2.2.3止推轴承的计算
对于颈部直径mm d 80=的吊钩选轻系列单列止推轴承8317,取静负荷容量
N C o 340000=。
轴承的计算载荷应等于或小于其静负荷容量:
0Q 2448002040002.1C N P R Q <=?==安计 (式6)
2.2.4 吊钩横梁的计算
图3 吊钩横梁计算简图
采用45号钢制造,强度极限MPa b 610=σ,屈服极限MPa s 430=σ,耐久极限 MPa 2501=-σ。
假设横梁上作用集中载荷,计算弯曲应力,此外还认为剪切力对弯曲应力影响不大,按结构布置确定计算尺寸,即靠边两个滑轮轴线间的距离mm l 240=,横梁中间宽度mm B 160=,拉板厚度mm 30=δ,横梁的计算载荷244800N =计Q (也是止推轴承的计算载荷)。
中间截面A-A 的最大弯曲应力
()5
.25.122s h d B l Q W M σσ≤-==
计
()s
d B l
Q h σ25.25.1-?≥
计=
()430
85160240
2448005.25.1?-???
mm 7.82= (式7) 式中 h ——横梁高度;
2d ——轴孔直径,()mm d d 855805212=+=-+=; 取 mm h 100=。
轴孔1d 的平均挤压应力 []be be d Q σδσ≤=
12计 86
302244800
21??=
≥
s
Q d δσ计
mm 4.47= (式8) 式中 []be σ——许用挤压应力,[]MPa s
be 865
==σσ;
δ——拉板厚度,mm 30=δ 取mm d 601=。
2.2.5 滑轮及滑轮轴承的选择
由钢丝绳直径mm d 81=绳,动滑轮直径mm 504D =滑,选择滑轮的型号为滑轮1997.365JB /T900545081A ——?。 滑轮用内轴套和隔环:
内轴套:19995.4110JB /T900T65—?; 隔环;199905.4H140JB /T90—; 滑轮轴承:46216;
滑轮挡盖:1999005.4AG140JB /T9—。
2.3 卷筒的计算
2.3.1 卷筒的基本尺寸
取卷筒(按槽底计算)直径mm 605D =;
卷筒的计算直径(按缠绕钢丝绳的中心计算)mm 785D =卷;
卷筒长度
100)6040745(2)(2310+++?=+++=光L L L L L s
mm 1790= (式9)
式中 0L ——卷筒上有螺旋槽部分长
202578.14.341610max 0???? ??+??=???? ??+?=o p Z D m H L π mm 745=
其中 m ax H ——最大起升高度; m ——滑轮组倍率;
0D ——卷筒计算直径,mm d D D 5780=+=; 1Z ——固定钢丝绳安全圈数,取21=Z ;
p ——绳槽槽距,查《机械设计手册》表8.1-49,得20=p ; 1L ——无绳槽卷筒端部尺寸,mm p L 4021==; 2L ——固定钢丝绳区段的长度,mm p L 6032==; 光L ——左右螺旋槽之间的距离,
ο4130022702min tg tg h l L ??-=-=α光
mm 88=
其中 l ——两侧滑轮绳槽中心线之间的距离,mm l 270=;
m in h ——当吊钩滑轮位于最上部极限位置时,卷筒轴和滑轮轴之间
的距离,mm h 1300min =;
α——绕上卷筒的钢丝绳分支相对于垂直位置的允许偏角,ο4=α; 取 mm L 100=光;
其壁厚按经验公式确定
()mm D 208.856002.010~602.0=+?=+=δ。
2.3.2 验算卷筒强度
卷筒的采莲采用HT30,抗压强度为MPa 750, 抗拉强度为MPa 250。 卷筒所受压应力
107MPa 16
2034360
S max =?==
δσp 压 []MPa k
b
17625
.4750
==
=σσ压 (式10) 式中 k ——对吊钩起重机的安全系数,k =4.25;
][压压σσ≤,满足受压强度要求。
由于卷筒长度D L 3>,尚应计算弯矩产生的拉应力;
图4 卷筒弯矩图
W
M =
拉σ 卷筒的最大弯矩产生在钢丝绳位于卷筒中央时,
2
1
max
max L L S l S M -== mm
N ?=-?
=219869002
100
179026020 (式11) 式中 L ——卷筒全长;
1L ——左右螺旋槽之间的距离;
卷筒断面系数
560
5205601.01.04
44
14-?=-=D D D W 34505142mm = (式12) 式中 D ——卷筒直径,mm D 560=;
1D ——卷筒内径,mm D D 52021=-=δ; 弯矩产生的拉应力
4505142
21986900
=
=W M 拉σ []拉σ<=MPa 88.4 满足受拉强度要求; 合成应力 [][]
05.65176
50
88.4?+
=+
=拉
压
拉拉σ
σσσσ MPa 36.23= 2.3.3 卷筒转速
min /16.53578
.0 3.144
7.5D vm 0r n =??==
π卷
2.4 电动机的确定 2.4.1 电动机的确定 起升机构静功率:
88.0600007.5
20400060000 v P Q ??=
=
η
静P
KW 29=
(式13) 式中 Q P ——最大起升载荷; η——起升机构总效率
88.094.096.098.0=??==传筒滑ηηηη;
电动机的计算功率: 静电P K ≥ jc P
由起重机的工作级别M5,可以由《工程起重机》标3—19中得到:0.8=电K kw 2.32920.8P jc =?≥
根据《机械设计通用手册》选定M YZR 225型电动机,
主要指标为:
转速 min /7500r n = 额定功率 kw P 26=
jc P 转速 m in /7081r n =
输出轴直径 mm D 65= 输出轴长度 mm E 140= 键槽宽 mm F 16=
2.4.2 电动机发热及过载验算 等效功率:
静效rP P = (式14)
根据表3—27,I
t t 起
,查表3—52起升机构曲线1得r =0.88,查表3—28
得K =0.75,
KW rP P 4.19920.880.75=??==静效
KW P jc 92=
效P P jc ≥,电动机满足不过热条件。
过载验算: 0.886000011.57.52040001.4 z60000v
HP P Q ?????=≥
ηλ静 (式15)
KW 0.72=
符合要求。
2.5 减速器的选用 2.5.1 减速器的确定 电动机的转速: )708750(8
.2125
.27750)(P P -
n n 10jc
0--
=-=n n 静 (式16)
min /5.697r = 传动比: 2.2416.53
697.5i ===
卷n n 根据《减速器选用手册》选定I ——减速器型变速器40242ZSY (242ZSY
1991JB /T5560—, 主要参数:
输入转速750r/min 许用输入功率31KW
货物的实际速度 min /03.840
4708
578.014.3D r mi
n
v =???=
=
卷π (式17)
2.5.2 减速器的验算
验算减速器被动轴的最大扭矩及最大径向力 最大扭矩的验算:
η?Ti T 75.0max = (式18)
mm
N ?=?????=2118294
.02.425
.69726
95500.275.0 式中 ?—电动机最大转矩倍数,?=2.0;
i — 减速器的传动比; η—减速器的效率,η=0.94;
减速器许用输入扭矩 mm N T ?=23500][ ][max T T ≤,符合要求;
输出轴最大径向力的验算:
)2(5.0max max 卷P S R += (式19)
N
3002080006020220.5=+??=)
(
式中 m ax S ——卷筒上钢丝绳最大拉力; 卷P ——卷筒重量,查阅得N P 8000=卷;
低速轴端的最大容许径向载荷 []N P 99400=,][max P R ≤,符合要求。
2.6 制动器的选择
根据物体下降时的扭矩静降T :
ηmi
T 2D P 0Q =
静降 (式20)
88.02
.4242578
.0204000????=
m N ?=3.349 式中 Q P ——最大载荷量,N P Q 204000=; 0D ——卷筒计算直径,m D 578.00=; m ——滑轮组倍率,4=m ; i ——减速器传动比,2.42=i ; η——总效率,88.0=η; 制动转矩 m N 2451.5T ?=≥静降制T ,
查《机械设计通用手册》选择制动器10300/50YWZ ——, 主要参数:
制动轮直径mm 300 额定转矩m 630N ?
2.7 联轴器的选择
根据电动机输出轴的直径和变速器输入直径选用联轴器CL4型齿轮联轴器和CL2型齿轮联轴器。 CL4的主要参数:
公称转矩m 1400N ?
许用转速3000r/min 转动惯量2m 0.05kg ? CL2的主要参数:
公称转矩m 5600N ? 许用转矩2000r/min 转动惯量2m 0.21kg ?
联轴器力矩的校核:
max 31k k T ∏=T (式21) 5.49618.1??= m N ?=7.893 式中 T ——传扭矩的计算值;
m ax ∏T ——按第∏类载荷计算的轴传最大扭矩,对高速轴
m ax ∏T n m T λ)8.07.0(-=,在此m λ位电动及转矩的允许过载倍数,n T 位电动机的额
定转矩,m N T n ?==331750
26
9550
,m N T ?=??=∏5.496331275.0max ;其中, 1k —联轴器重要参数,对于起升机构1k =1.8; 3k —角度偏差系数,1k 3=;
联轴器符合要求。
2.8 起制动时间验算 2.8.1 起动时间的验算 启动时间:
)
973-530(55.92
750)(55.9][t q ?=-=
j Q T T J n (式22)
s 18.1=
式中 n ——电动机额定转速,min /750r n =;
Q T ——电动机平均起动转矩,m N T T n Q ?=??==530750
26
95506.16.1; j T ——电动机静阻力矩,m N mi D P T Q j ?==
38020η
;
][J ——机构运动质量换算到电动机轴上的总转动惯量(2m kg ?):
903
.06.403404175.0200000)01.16.0(15.140)(15.1][232
232????+
+=++=ηi m D P J J J Q c d 卷
22m kg ?=
其中 d J —电动机转子的转动惯量,d J =0.672m kg ?; c J —制动轮和联轴器的转动惯量,c J =1.012m kg ?;
[]
s t t q q 2=<,起动时间符合要求。
2.8.2 制动时间的验算 满载下降制动时间:
)(55.9][t '
'z 静降制T T J n -= (式23)
)
49.33-630(55.92
825?=
s 62.0=
式中 'n ——满载下降时的电动机转速,min /8251.1'r n n ==;
制T ——制动器的制动力矩,m N T ?=630制; 静降T —电动机静阻力矩,m N T ?=3.349静降;
'][J —机构运动质量换算到电动机轴上的总转动惯量()2m kg ?,2]['=J 。
、 北京理工大学珠海学院 课程设计任务书 2010 ~2011 学年第 2学期 学生姓名:林泽佳专业班级:08自动化1班指导教师:钟秋海工作部门:信息学院一、课程设计题目 : 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容|
! " [2 有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 , 1、求被控对象传递函数G(s)的MATLAB描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳 定的要求。(8分)
6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。 (3分) ! 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。 (8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际 闭环系统稳定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。 & (8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) 三、进度安排 6月13至6月14:下达课程设计任务书;复习控制理论和计算机仿真知识,收集资料、熟悉仿真工具;确定设计方案和步骤。 6月14至6月16:编程练习,程序设计;仿真调试,图形仿真参数整定;总结整理设计、 仿真结果,撰写课程设计说明书。 6月16至6月17:完成程序仿真调试和图形仿真调试;完成课程设计说明书;课程设计答 辩总结。 [ 四、基本要求
自动送料机构设计 摘要:本课题所设计的自动送料机构的目的,是为了实现自动送料,消除积累误差,同时减少劳动力成本。在设计过程中,主要是设计了工作台以及工作台面上的夹紧装置,滚珠丝杠的选用,以及可以实现自动送料的伺服电机。通过对这些方面的设计和研究,可以大大减少劳动力成本,减少了误差,同时也简化了机构。这在实际生产中具有很好的推广效果和意义。 关键词:冲床工作台滚珠丝杠伺服电机
Abstract: the design of this project be automatic conveying mechanism in order to realize the aim, is automatic packing, eliminate accumulation error, while reducing the cost of Labour. In the design process, mainly design on the bench and workbench clamping device, ball screw choose, and can realize automatic feed of servo motors. Based on the design and research of these aspects, can reduce labor costs, reduce the error, also simplifies organization. This in practical production have very good promotion effect and meaning. Keywords: punch workbench ball screw servo motor
《信息系统仿真课程设计》 课程设计报告 题目信息系统课程设计仿真 院(系): 信息科学与技术工程学院 专业班级:通信工程1003 学生姓名: 学号: 指导教师:吴莉朱忠敏 2012年1 月14 日至2012年1 月25 日 华朴中科技大学武昌分校制 信息系统仿真课程设计任务书
20 年月日 目录 摘要 (5)
一、Simulink 仿真设计 (6) 1.1 低通抽样定理 (6) 1.2 抽样量化编码 (9) 二、MATLA仿真设计 (12) 2.1 、自编程序实现动态卷积 (12) 2.1.1 编程分析 (12) 2.1.2 自编matlab 程序: (13) 2.1.3 仿真图形 (13) 2.1.4 仿真结果分析 (15) 2.2 用双线性变换法设计IIR 数字滤波器 (15) 2.2.1 双线性变换法的基本知识 (15) 2.2.2 采用双线性变换法设计一个巴特沃斯数字低通滤波器 (16) 2.2.3 自编matlab 程序 (16) 2.2.4 仿真波形 (17) 2.2.5 仿真结果分析 (17) 三、总结 (19) 四、参考文献 (19) 五、课程设计成绩 (20) 摘要 Matlab 是一种广泛应用于工程设计及数值分析领域的高级仿真平台。它功能
强大、简单易学、编程效率高,目前已发展成为由MATLAB 语言、MATLAB 工作环境、MATLAB 图形处理系统、MATLAB 数学函数库和MATLAB 应用程序接口五大部分组成的集数值计算、图形处理、程序开发为一体的功能强大的系统。本次课程设计主要包括MATLAB 和SIMULINKL 两个部分。首先利用SIMULINKL 实现了连续信号的采样及重构,通过改变抽样频率来实现过采样、等采样、欠采样三种情况来验证低通抽样定理,绘出原始信号、采样信号、重构信号的时域波形图。然后利用SIMULINKL 实现抽样量化编码,首先用一连续信号通过一个抽样量化编码器按照A 律13折线进量化行,观察其产生的量化误差,其次利用折线近似的PCM 编码器对一连续信号进行编码。最后利用MATLAB 进行仿真设计,通过编程,在编程环境中对程序进行调试,实现动态卷积以及双线性变换法设计IIR 数字滤波器。 本次课程设计加深理解和巩固通信原理、数字信号处理课上所学的有关基本概念、基本理论和基本方法,并锻炼分析问题和解决问题的能力。
《计算机仿真及应用》课程设计报告书 学号:08057102,08057127 班级:自动化081 姓名陈婷,万嘉
目录 一、设计思想 二、设计步骤 三、调试过程 四、结果分析 五、心得体会 六、参考文献
选题一、 考虑如下图所示的电机拖动控制系统模型,该系统有双输入,给定输入)(t R 和负载输入)(t M 。 1、 编制MATLAB 程序推导出该系统的传递函数矩阵。 2、 若常系数增益为:C 1=Ka =Km =1,Kr =3,C2=0.8,Kb =1.5,时间常数T 1=5, T 2=0.5,绘制该系统的根轨迹、求出闭环零极点,分析系统的稳定性。若)(t R 和)(t M 分别为单位阶跃输入,绘制出该系统的阶跃响应图。(要求C 1,Ka ,Km ,Kr ,C2,Kb , T 1,T 2所有参数都是可调的) 一.设计思想 题目分析: 系统为双输入单输出系统,采用分开计算,再叠加。 要求参数均为可调,而matlb 中不能计算未赋值的函数,那么我们可以把参数设置为可输入变量,运行期间根据要求赋值。 设计思路: 使用append 命令连接系统框图。 选择‘参数=input('inputanumber:')’实现参数可调。 采用的方案: 将结构框图每条支路稍作简化,建立各条支路连接关系构造函数,运行得出相应的传递函数。 在得出传递函数的基础上,使用相应的指令求出系统闭环零极点、画出其根轨迹。 通过判断极点是否在左半平面来编程判断其系统是否稳定。 二.设计步骤 (1)将各模块的通路排序编号
(2)使用append命令实现各模块未连接的系统矩阵 (3)指定连接关系 (4)使用connect命令构造整个系统的模型 三.调试过程 出现问题分析及解决办法: 在调试过程出现很多平时不注意且不易寻找的问题,例如输入的逗号和分号在系统运行时不支持中文格式,这时需要将其全部换成英文格式,此类的程序错误需要细心。 在实现参数可调时初始是将其设为常量,再将其赋值进行系统运行,这样参数可调性差,后用‘参数=input('inputanumber:')’实现。 最后是在建立通路连接关系时需要细心。 四.结果分析 源代码: Syms C1 C2 Ka Kr Km Kb T1 T2 C1=input('inputanumber:') C2=input('inputanumber:') Ka=input('inputanumber:') Kr=input('inputanumber:') Km=input('inputanumber:') Kb=input('inputanumber:') T1=input('inputanumber:') T2=input('inputanumber:') G1=tf(C1,[0 1]); G2=tf(Ka*Kr,[0 1]); G3=tf(Km,[T1 1]); G4=tf(1,[T2 1]); G5=tf(1,[1 0]); G6=tf(-C2,1); G7=tf(-Kb,1); G8=tf(-1,1); Sys=append(G1,G2,G3,G4,G5,G6,G7,G8) Q=[1 0 0;2 1 6;3 2 7;4 3 8;5 4 0;6 5 0;7 4 0;8 0 0;]; INPUTS1=1; OUTPUTS=5; Ga=connect(Sys,Q,INPUTS1,OUTPUTS) INPUTS2=8; OUTPUTS=5; Gb=connect(Sys,Q,INPUTS2,OUTPUTS) rlocus(Ga)
毕业设计说明书 题目:自动送料装置结构设计 学号: 姓名: 班级: 专业:机械设计制造及其自动化 指导教师: 学院:机械工程学院 答辩日期:
摘要 本毕业设计设计了一台用于传送皮革面料的自动送料装置。以高精准高效率为送料目的,设计该装置使用气缸为动力源。结合合适的直线导轨,真空吸盘等零部件,通过不同气缸的相互配合来完成整个送料过程,将皮革面料输送到加工区。 关键词:自动化;气缸;送料
Abstract An automatic feeding device is designed for transporting leather. Cylinders are used in this equipment as the power source with high precision and high efficiency for the purpose combined with linear guide and vacuum chuck. Put the leather transports to the processing area. Key words: Automation; Cylinder; Feeding
目录 第1章绪论 (1) 1.1设计的背景和意义 (1) 1.2设计的内容和思路 (1) 1.3解决的主要问题 (2) 第2章总体设计方案 (3) 第3章. 结构设计部分 (5) 3.1托料板的设计 (5) 3.2气缸的选择 (5) 3.3吸盘的选择 (11) 3.4导轨的选择 (12) 3.5脚座的设计 (14) 3.6其他主要部件的设计 (14) 第4章基于UG软件的仿真分析 (15) 4.1 UG介绍 (15) 4.2 UG三维仿真分析 (16) 结论 (23) 参考文献 (24) 致谢 (26)
附件1: 北京理工大学珠海学院 《计算机仿真》课程设计说明书题目: 控制系统建模、分析、设计和仿真 学院:信息学院 专业班级: 学号: 学生姓名: 指导教师: 2012年6 月16 日 附件2: 北京理工大学珠海学院 课程设计任务书 2011 ~2012 学年第2学期 学生姓名:专业班级: 指导教师:工作部门:信息学院 一、课程设计题目 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。
[0号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [1号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [2号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [3号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [4号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [5号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹 控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [6号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹 控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [7号题] 控制系统建模、分析、设计和仿真
机械设计基础课程设计任务书 专业__流体传动与控制__班级__流体041_设计者_蒋金云_学号__2号__ 设计题目:单边滚轴自动送料机构设计与分析 请将相关数据填入表1中。 表1 单边辊轴自动送料机构的原始数据 7O22O32O42 图1 单边辊轴送料装置原理图 题目的原始数据见表1,其中: S n—板料送进距离;n—压机频次;B—板料厚度;H—冲压滑块行程;[α]—许用压力角;F b—板料送进阻力;F r—冲压板料时的阻力;δ—速度不均匀系数; e=0 ,取R1=R b 要求:2号图纸两张,设计计算说明书一份。 设计期限:2006年6月19日至2006年6月23日 颁发日期:2006年6月18日 一、机构尺寸综合
已知数据见表1,要求确定机构尺寸:l O1A, l O1A' , l A'C , 及开始冲压时滑块C点至板料的距离S i。 步骤: 1.求辊轴转角 2.摇杆摆角 3.机架中心距 4.曲柄半径r= l O1A 5.曲柄滑块机构 曲柄半径r1 6.根据许用压力角[α]调节连杆长l1,取l1=560mm,并验算: 二、用相对运动图解法,求滑块和板料的速度分析 1.求v A'及v A v A=r1ω1=40×26mm/s =1040mm/s, v A=rω1=96×26mm=2496mm/s 其中、ω1=2πn/60=2π×250/60rad/s =26 rad/s 2.列出矢量方程,求v C、 v B 0点位置: 取比例尺μv=60mm/mm,则pa′=17mm,pa=41mm v c=0,v B=39.5×60mm/s =2370mm/s 1点位置: 取比例尺μv=60mm/mm, v c=9×60mm/s =540mm/s=0.54mm/s,v B=31×60mm/s =1860mm/s
《计算机仿真技术》 课程设计 姓名: 学号: 班级: 1 专业: 学院: 2016年12月24日
目录 一、设计目的 (1) 二、设计任务 (1) 三、具体要求 (1) 四、设计原理概述 (1) 五、设计内容 (2) 六、设计方案及分析 (2) 1、观察原系统性能指标 (2) 2、手动计算设计 (6) 3、校正方案确定 (8) 七、课程设计总结 (14)
模拟随动控制系统的串联校正设计 一、设计目的 1、通过课程设计熟悉频域法分析系统的方法原理。 2、通过课程设计掌握滞后-超前校正作用与原理。 3、通过在实际电路中校正设计的运用,理解系统校正在实际中的意义。 二、设计任务 控制系统为单位负反馈系统,开环传递函数为) 1025.0)(11.0()(G ++=s s s K s ,设计校正装置,使系统满足下列性能指标:开环增益100K ≥;超调量30%p σ<; 调节时间ts<0.5s 。 三、具体要求 1、使用MATLAB 进行系统仿真分析与设计,并给出系统校正前后的 MATLAB 仿真结果,同时使用Simulink 仿真验证; 2、使用EDA 工具EWB 搭建系统的模拟实现电路,分别演示并验证校正前 和校正后的效果。 四、设计原理概述 校正方式的选择:按照校正装置在系统中的链接方式,控制系统校正方式分 为串联校正、反馈校正、前馈校正和复合校正4种。串联校正是最常用的一种校 正方式,这种方式经济,且设计简单,易于实现,在实际应用中多采用这种校正 方式。串联校正方式是校正器与受控对象进行串联链接的。本设计按照要求将采 用串联校正方式进行校正。 校正方法的选择:根据控制系统的性能指标表达方式可以进行校正方法的确 定。本设计要求以频域指标的形式给出,因此采用基于Bode 图的频域法进行校 正。 几种串联校正简述:串联校正可分为串联超前校正、串联滞后校正和滞后- 超前校正等。 超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提
计算机仿真课程设计 Prepared on 22 November 2020
附件1: 北京理工大学珠海学院 《计算机仿真》课程设计说明书题目: 控制系统建模、分析、设计和仿真 学院:信息学院 专业班级: 学号: 学生姓名: 指导教师: 2012年 6 月 16 日 附件2: 北京理工大学珠海学院 课程设计任务书 2011 ~2012 学年第 2学期 学生姓名:专业班级: 指导教师:工作部门:信息学院 一、课程设计题目 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。
学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容 [0 [1号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [2号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [3号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [4号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [5号题] 控制系统建模、分析、设计和仿真
自动送料机构设计 以下是为大家整理的自动送料机构设计的相关范文,本文关键词为自动,送料,机构,设计,无锡,职业,技术,学院,毕业设计,说,您可以从右上方搜索框检索更多相关文章,如果您觉得有用,请继续关注我们并推荐给您的好友,您可以在综合文库中查看更多范文。 无锡职业技术学院毕业设计说明书 自动送料机构设计 摘要
本课题所设计的自动送料机构的目的,是为了实现自动送料,消除积累误差,同时减少劳动力成本。在设计过程中,主要是设计了工作台以及工作台面上的夹紧装置,滚珠丝杠的选用,以及可以实现自动送料的伺服电机。通过对这些方面的设计和研究,可以大大减少劳动力成本,减少了误差,同时也简化了机构。这在实际生产中具有很好的推广效果和意义。 关键词:冲床工作台滚珠丝杠伺服电机 I 无锡职业技术学院毕业设计说明书 自動送り機構の設計 概要 このセフルフィ-ディングを実現するためで,誤差を蓄積することを取り除いて,同時にすくない労働力のコストを弱めますか。設計する過程の中に主設計してワ-クステ-ション及びテ-ブル表面の上仕事するのへはさんて不自由装置する,ボ-ル親螺子の選択の使用,またセフルフィ-ディングのサ-ビスのモ-タ-を実現することができますか。通じるこれら方面の設計に対するおよび研究して,大いにコスト労働力を減すことができて,誤差を減した,同時に機構も簡略化しました。これは実際的な生産でとてもよい拡張の効果
と意味があります。 キ-·ワ-ド:打抜盤、ワ-クステ-ション、ボ-ルの親螺子、サ-ビスのモ-タ- II 无锡职业技术学院毕业设计说明书 第一章引言 1.1课题的背景 在我国和国外的生产和研究中,自动送料方式有很多种,但是在这些产品中,存在着一些问题。如日本的RF20sD-oR11机械手送料装置与冲床做成一体,从横向(侧面)送料,结构复杂,装配、制造、维修困难,价格昂贵,又不适合于我国冲床的纵向送料的要求。RF20sD—oR11的结构由冲床上的曲轴输出轴.通过花键轴伸缩,球头节部件联接机械手齿轮,由伞齿轮、圆柱齿轮、齿条、凸轮、拨叉、丝杆等一系列传动件使机械手的夹爪作伸缩、升降、夹紧、松开等与冲床节拍相同的动作来完成送料,另设一套独立驱动可移式输送机,通过隔料机构将工件输送至预定位置,这样一套机构的配置仅局限于日本设备,不能应用于国产冲床。国内有的送料机构由冲床工作台通过连杆弹簧驱动滑块在滑道上水平滑动,将斜道上下来的料,通过隔料机构推到模具中心,并联动打板将冲好的料拨掉,往复运动的一整套机构比较简单,无输送机构,联动可靠,制造容易。但机械手不能将料提升、夹紧,料道倾斜放置靠料自重滑下,如规格重量变动,则料道上工件下滑速度不一致,易产生叠料,推料机构役有将料夹紧,
题目自动送料冲床机构的设计 学院 机电学院 专业年级 09 机械工程及自动化 学号姓名 0961010815 刘健 指导教师 张洪双 二○一一年六月 机械原理课程设计任务书
一、设计题目:自动送料冲床机构综合与传动系统设计 二、工作原理及工艺动作过程: 图1为某冲床机构运动方案示意图。该冲床用于在板料上冲制电动玩具中需要的薄齿轮。【电动机通过V带传动和齿轮传动(图中未画出)带动大齿轮转动,(另加解释)】通过连杆/A C带动滑块上下往复运动,实现冲制工艺。四O AB O和齿轮机构实现自动送料。 杆机构2 12 图1冲床机构运动方案示意图 三、原始数据及设计要求: 依据冲床工矿条件的限制,预先确定了有关几何尺寸和力学参数,如表1所示。
表1冲床机构设计数据 设计要求:设计的冲床机构机构紧凑,机械效率高。 四、设计方案提示: 连杆机构可采用双摇杆机构,也可采用曲柄摇杆机构 五、设计的主要任务 图 2 冲头所受阻力曲线 (l)绘制冲床机构的工作循环图,使送料运动与冲压运动重叠,以缩短冲
床工作周期。 (2)针对图1所示的冲床的执行机构(冲压机构和送料机构)方案,依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图。(3)假设曲柄等速转动,画出滑块C的位移和速度的变化规律曲线。(4)在冲床工作过程中,冲头所受的阻力变化曲线如图2所示,在不考虑各处摩擦、其他构件重力和惯性力的条件下,分析曲柄所需的驱动力矩。(5)确定电动机的功率与转速。 (6)取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量。 (7)确定传动系统方案,设计传动系统中各零部件的结构尺寸。 (8)绘制冲床传动系统的装配图与齿轮、轴等的零件图。 (9)编写课程设计说明书。 目录
《计算机仿真》MATLAB课程设计报告 学院:自动化学院 专业:自动化专业 班级: 姓名: 学号: 2013年1月14日
目录 一、基本操作 (1) 1、定义一组数据 (1) 2、作f1(t)的波形 (1) 3、作f2(t)的波形 (2) 4、求传递函数以及伯德图 (3) 二、子系统封装 (4) 1、用simlink建立系统 (4) 2、锯齿波输入下的输出 (5) 3、在工作空间绘制波形图 (6) 三、PID控制器参数整定 (7) 1、设置各控制器参数 (8) 2、整定后系统的单位阶跃响应曲线 (10) 3、编程法求动态性能指标 (13) 四、总结与体会 (14) 五、参考文献 (14)
一、基本操作 程序实现: 1、自己定义一组数据,并将其保存到文件data.dat 。要求第一列为时间t (t 为等差数列,0≤t≤200);第二列为与t 对应的201个幅值数据,作为信号f 1 (t )的幅值;第三列为按s 的降幂排列的传递函数分子系数;第四列为按s 的降幂排列的分母系数。第三列、第四列的数据个数不能超过5个。 2、读入data.dat 数据,画出f 1 (t )的时域波形。 3 ? ?? ? =)(f 2t 求取f 2 (t ),将结果保存到result.mat 文件,画出其时域波形。 4、按 data.dat 中的第三列、第四列,求取其对应的传递函数,绘制其bode 图。 报告要求:简述程序的实现过程。 各环节实现过程: 1、直接在excel 中按要求写入一组数据,即第一列201个数据t 代表201个时间0--200;第二列是与第一列对应的201个幅值数据;第三列为按s 的降幂排列的传递函数分子系数;第四列为按s 的降幂排列的分母系数。 2、要画出f1(t)的时域波形,具体做法是:先读取excel 中的数据,把它们放入一个矩阵A ,取矩阵的第一列作为输入x ,取矩阵的第二列作为输入y ,最后用plot 命令绘制出f1(t)的时域波形。具体编程及f1(t)的时域波形如下:A=xlsread('J:\data.dat.xls', 'sheet1');x=A(:,1);y=A(:,2);plot(x,y)
西南交通大学 自动送料冲床机构综合 机械原理课程综合设计 设计计算说明书 学院机械工程系 班级08铁道车辆3班 姓名易礼东 完成日期2010年12月25日 指导老师冯鉴老师
1.设计任务 1.1设计题目 自动送料冲床机构综合 1.2自动送料冲床简介 自动送料冲床用于冲制、拉伸薄壁零件,本课题设计的自动送料冲床机构主 要用于生产玩具车上的薄壁圆齿轮。冲床的执行机构主要包括冲压机构和送料机构。工作时,要求送料机构先将原料胚件送至冲头处,然后送料机构要保证原料胚件静止不动,同时冲压机构快速的冲压原料胚件,制成要求的齿轮。最后,冲头快速返回,执行下一个循环。送料机构在此期间将原料胚件送至待加工位置,完成一个工作循环。 1.3设计条件与要求 ①以电动机作为动力源,下板固定,从动件(冲头)作为执行原件,做上下 往复直线运动,其大致运动规律如图1所示,具有快速下沉、等速工作给进和快速返回等特性。 ②机构应具有较好的传力性能,工作段的传动角r 大于或等于许用传动角 冲床机构运动方案示意图
[r]=450 ③冲头到达工作段之前,送料机构已将配料送至待加工位置。 ④生产率为每分钟180件。 ⑤冲头的工作段长度l=100mm ,冲头总行程长度必须大于工作长度两倍以上。 ⑥冲头的一个工作循环内的受力如图2所示,在工作段所受的阻力F 1=2300N , 其他阶段所受的阻力为工作段所受阻力的五分之一。即F 0=460N 。 ⑦送料距离S n =150mm 。 ⑧机器运转速度不均匀系数不超过0.03。 图 1 图2 1.4设计任务 1. 绘制冲床机构的工作循环图,使送料运动与冲压运动重叠,以缩短冲床工作周期; 2. 针对图所示的冲床的执行机构(冲压机构和送料机构)方案,依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图; 3. 在冲床工作过程中,冲头所受的阻力变化曲线如图所示,在不考虑各处摩擦、其他构件重力和惯性力的条件下,分析曲柄所需的驱动力矩; 4. 取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量; 冲头所受阻力曲线
《自控系统数字仿真》实验指导书西安建筑科技大学信息与控制工程学院
目录 目录 (1) 1 课程简介,实验内容及学时安排 (1) 1.1 课程简介 (1) 1.2 实验内容及学时安排 (1) 2 《线性系统理论基础》课程实验 (3) 实验一 MATLAB的基本运算和符号运算的使用 (3) 实验二 MATLAB语言程序设计和图形绘制 (8) 实验三 Simulink基础 (12) 实验四连续系统数值积分法仿真 (17) 附录一MATLAB 函数参考........................................................ 错误!未定义书签。附录二控制工具箱介绍............................................................... 错误!未定义书签。
1 课程简介,实验内容及学时安排 1.1 课程简介 《自控系统数字仿真》课程是电子信息类专业及仪器测量类专业本科生的专业应用技术课程,通过本课程的学习,使学生建立系统仿真的基本概念、掌握常用的仿真方法、模型的建立、仿真常用参数的选择、系统参量间的配合,能够分析仿真结果与实际系统响应的关系,掌握系统仿真在控制系统设计中应用等。同时对当今最具代表性的控制系统数字仿真语言——MATLAB/Simulink进行学习,掌握MATLAB 的基本概念和原理,侧重于学习MATLAB语言编程基础与技巧,数值分析算法的MATLAB实现,着重掌握动态系统的数学模型及仿真工具SIMULINK等。 《自控系统数字仿真》课程作为联系理论教学内容与“课程设计”、“毕业设计”等实践教学环节的一门专业类课程,是以提高学生能力为主要目的的,《自控系统数字仿真实验》是学习数字仿真技术的一个重要环节。通过该实验课的基本训练,使学生充分理解控制系统仿真的原理,掌握基本的仿真步骤和方法,熟悉MATLAB软件的使用,具备对一般控制过程的仿真能力,为学生在今后的学习、工作中提供一个强有力的工具,能有效地加强教学中的实践教学环节,培养学生的独立工作能力和创造性思维能力,为学生今后从事该领域的科学研究和技术开发工作打下扎实的基础。 1.2 实验内容及学时安排 本课程的实践环节单元实验和综合实验构成,目前实验主要基于MATLAB仿真软件进行仿真实验。单元实验每个实验2学时,综合实验4学时,要求学生一人一机,独立完成,由此使学生得到较全面的基础训练。
课程设计报告 题目PID控制器应用 课程名称控制系统仿真院部名称机电工程学院专业 班级 学生姓名 学号 课程设计地点 课程设计学时 指导教师 金陵科技学院教务处制成绩
一、课程设计应达到的目的 应用所学的自动控制基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行控制系统的初步设计。 应用计算机仿真技术,通过在MATLAB软件上建立控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 二、课程设计题目及要求 1.单回路控制系统的设计及仿真。 2.串级控制系统的设计及仿真。 3.反馈前馈控制系统的设计及仿真。 4.采用Smith 补偿器克服纯滞后的控制系统的设计及仿真。 三、课程设计的内容与步骤 (1).单回路控制系统的设计及仿真。 (a)已知被控对象传函W(s) = 1 / (s2 +20s + 1)。 (b)画出单回路控制系统的方框图。 (c)用MatLab的Simulink画出该系统。 (d)选PID调节器的参数使系统的控制性能较好,并画出相应的单位阶约响应
曲线。注明所用PID调节器公式。PID调节器公式Wc(s)=50(5s+1)/(3s+1) 给定值为单位阶跃响应幅值为3。 有积分作用单回路控制系统 无积分作用单回路控制系统
大比例作用单回路控制系统 (e)修改调节器的参数,观察系统的稳定性或单位阶约响应曲线,理解控制器参数对系统的稳定性及控制性能的影响? 答:由上图分别可以看出无积分作用和大比例积分作用下的系数响应曲线,这两个PID调节的响应曲线均不如前面的理想。增大比例系数将加快系统的响应,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏;增大积分时间有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长,加入微分环节,有利于加快系统的响应速度,使系统超调量减小,稳定性增加。 (2).串级控制系统的设计及仿真。 (a)已知主被控对象传函W 01(s) = 1 / (100s + 1),副被控对象传函W 02 (s) = 1 / (10s + 1),副环干扰通道传函W d (s) = 1/(s2 +20s + 1)。 (b)画出串级控制系统方框图及相同控制对象下的单回路控制系统的方框图。(c)用MatLab的Simulink画出上述两系统。
摘要 本文主要对冲压模具及其自动送料机构的设计,它的工作过程如下:在送料之前,要先用手柄抬起万向联结节,以便在上下辊轴之间形成空隙,将薄板料从间隙穿过,然后按下手柄压紧入料。当上模回程时,通过曲柄摇杆机构中的摇杆带动下辊顺时针旋转,从而带动主动辊和从动辊同时旋转完成送料工作。当上模下行时,因为下辊的缘故,辊轴停止不动,接着就是完成冲压的工序了。当偏心轮再次回程,又重复上述动作,照此循环动作,达到间歇送料的目的。 通过对冲压模具及其自动送料机构的设计,使三年所学的机械专业知识在实践中加深了认识,并且相当于进行了一次全面性的复习。
Abstract This article mainly to the ramming mold and the feed control organization design, its work process is as follows: In front of feeding, must use the handle to lift the rotary association tubercle first, in order to forms the crevice between about stone roller, the thin sheet from the gap traversing, then presses down the handle to contract into the material. When top die return trip, through crank rocker organization in rocking bar impetus lower roll clockwise rotation, thus the impetus drive roll and the underdriven roll simultaneously revolve complete the feeding work. When top die downward, because of the lower roll reason, the stone roller stops motionless, then was completes the ramming the working procedure. When eccentric once more return trip, also duplicates the above movement, according to this the cyclic action, achieves the intermittent feeding the goal. Through to the ramming mold and the feed control organization design, made the machinery specialized knowledge which three years institute studied to deepen the understanding in reality, and was equal in has carried on an integrity review.
《计算机仿真技术》课程设计指导书 一、设计目的 本课程设计是用实验的方法帮助学生更好地熟悉和掌握计算机仿真的基本原理和方法;通过综合应用所学知识,实现一些智能优化算法的经典方法,以及智能优化算法的基本应用;同时提高学生编写实验报告、总结实验结果的能力;使学生对计算机仿真和智能优化算法的相关理论和方法有更深刻的认识。 二、设计题目与设计内容 1. 用遗传算法求解TSP问题 TSP问题是一个典型的组合优化问题,遗传算法在求解这类问题上具有很好的表现。学生必需自己设计染色体的编码和适应度函数的定义,在此基础上实现最优解的搜索。设计要求如下: (1)能输入城市的数目; (2)实现寻优过程的动态演示; (3)合理设计交叉变异算子,避免出现非法路线; (4)能对选择、交叉和变异等的概率进行设置; (5)能显示历代最优、最差和平均解的统计图。 2. 差异进化算法求解约束优化问题 约束优化问题是工程和科学领域经常会遇到的一类优化问题。差异进化算法已被广泛应用于求解这类问题。约束优化问题的任务是在可行域内找到指定目标函数的最优解。学生要求设计惩罚函数和优化算法中的算子。具体设计要求如下: (1)用惩罚函数处理约束优化问题中的约束条件; (2)用差异进化算法完成求解; (3)对结果进行分析,并发现算法可能存在的问题,并对算法进行改进; (4)对算法中存在的参数进行敏感性分析; (5)给出不同搜索算法的对比结果。 3. 粒子群优化算法求解多目标优化问题 现实生活中的优化问题大都存在多个目标,因而研究多目标优化问题的求解具有十分重要的理论与实际意义。多目标优化问题的最优解一般为无穷多个。粒子群优化算法是模拟鸟群寻找食物而产生的一种智能优化算法。学生要求利用粒子群优化算法求解多目标优化问题。设计要求如下:
1、题目:数控系统的计算机仿真 2、要求:(1) NC 代码中包含的代码类型有: G90 G54(G92) G00 G01 G02 G03 M03 M05 M08 M09 M30 例:下面给出一个具体的图形示意图,NC 代码及其加工轨迹图: % O0000 N106G0G90G54X10.Y20.M03M08 N108Z50. N110Z10. N112G1Z-1. N114Y15.0 N118G2X15.Y13.09J7.5 N120X20.Y15.I-5.0J5.59 N122G1Y20.0 N126X10. N128G0Z50. N130M5M09 N136M30 % (2)要求根据NC 代码屏幕模拟加工过程,图形显示位置,坐标值显示,辅助功能状态显示(冷却液和主轴开关量控制模拟显示)。 (3)PC 机模拟加工过程中,要求有实时的驱动三轴步进电机的控制信号、控制冷 图1 工件平面图 图2 加工仿真示意图
却液和主轴转动的开关量输出控制信号。假设信号从计算机并行打印口的数据信号线输出,端口地址为0x378。并行口数据线分配如下(低电平有效): 表一并行口数据线信号定义 (4)每个学生应在规定时间内,独立完成所选题目。运用VB编程语言,编写计算机软件在WINDOWS实现数控装置的计算机仿真。要求清楚地分析问题、提出算法、确定人机界面、列出流程图,最后用程序验证,完成软件测试,并且提交程序说明书。 1.摘要 从工程的角度来看,仿真就是通过对系统模型的实验去研究一个已有的或设计中的系统,分析复杂的动态对象,仿真是一种有效的方法,可以减少风险,缩短设计和制造的周期并节约投资。计算机仿真就是借助计算机,利用系统模型对实际系统进行实验研究的过程。它随着计算机技术的发展而迅速地发展,在仿真中它有越来越重要的地位。 计算机仿真技术的发展趋势主要表现在两个方面:应用领域的扩大和仿真计算机的智能化。计算机仿真技术不仅在传统的工程技术领域(航空、航天、化工等方面)继续发展,而且扩大到社会经济、生物等许多非工程领域,此外,并行处理、人工智能、知识库和专家系统等技术的发展正影响着仿真计算机的发展。 数控加工仿真利用计算机来模拟实际的加工过程,是验证数控加工程序的可靠性和预测切削过程的有力工具,以减少工件的试切,提高生产效率。 仿真软件界面友好,基本实现了设计任务的要求,通过本软件可以知道在仿真加工刀具的坐标、各轴的工作情况以及辅助电机(冷却液的控制情况)本仿真程序应用的是脉冲插补算法。在仿真过程中应用了两种插补方法:直