
编码器和按钮操作型开关 SRBE系列
产品编号SRBE110301
操作轴数1轴
轴材质树脂
定位数12
脉冲数6
操作?向Horizontal
安装?法表?贴装
?程(按动操作)0.2mm
使?温度范围-10℃ to +60℃
最?额定/最?额定(电阻负载)1mA 5V DC/50μA 3V DC
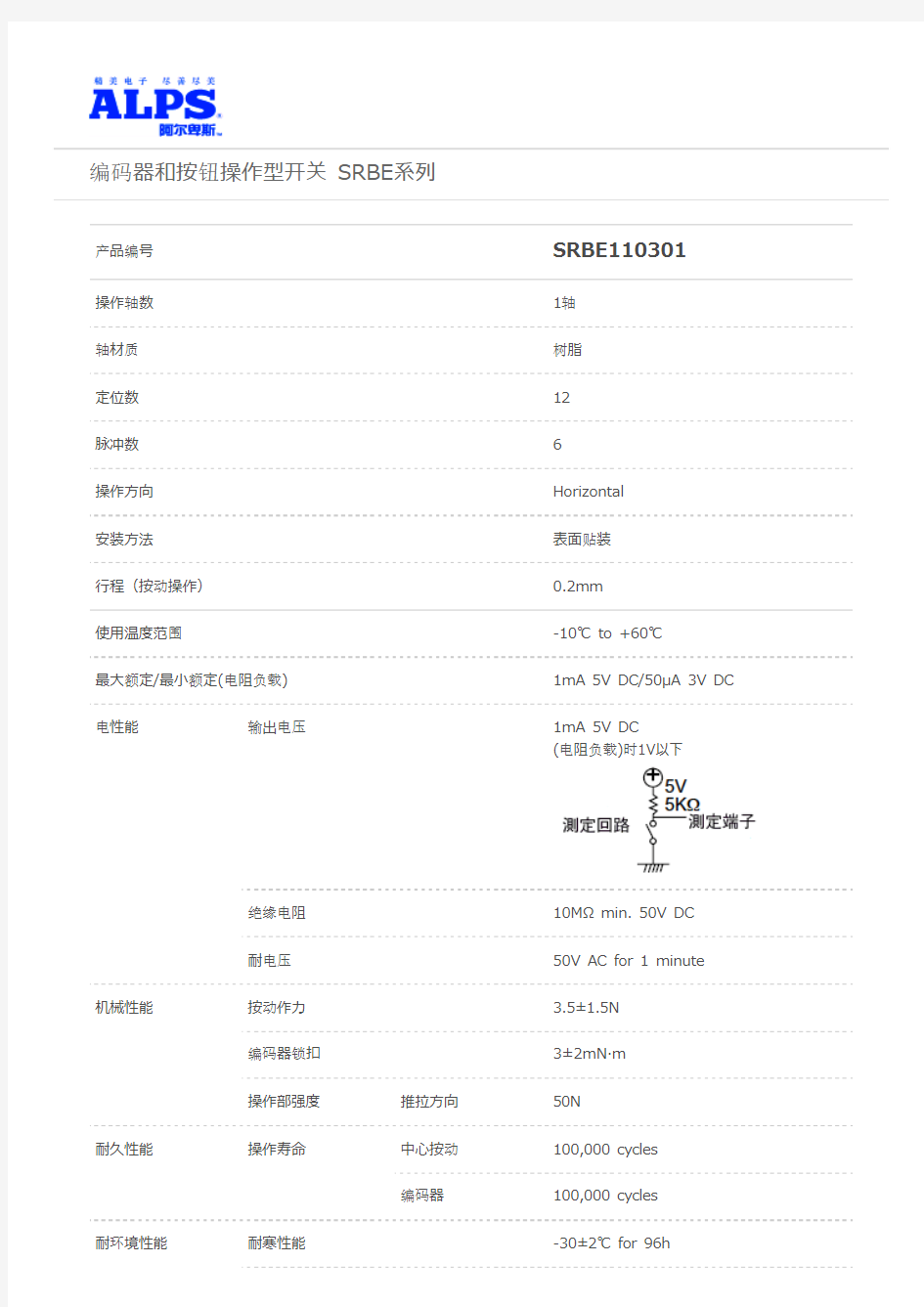
电性能输出电压1mA 5V DC
(电阻负载)时1V以下
绝缘电阻10MΩ min. 50V DC
耐电压50V AC for 1 minute
机械性能按动作? 3.5±1.5N
编码器锁扣3±2mN·m
操作部强度推拉?向50N
耐久性能操作寿命中?按动100,000 cycles
编码器100,000 cycles
耐环境性能耐寒性能-30±2℃ for 96h
耐热性能85±2℃ for 96h
耐湿性能40±2℃, 90 to 95%RH for 96h 最?订货单位(pcs.)?本1,500
出?6,000
照?
外形图
焊接处尺?图
?A?向看
电路图
包装规格
载带
梱包数(pcs.)1卷1,500
1箱/?本3,000
1箱/出?包装6,000
载带宽度(mm)24
出?包装箱尺?(mm)428×413×172
回流?式的参考举例
1. 加热?式
远红外线加热的上下加热?式。
2. 温度测量?式?
φ0.1?φ0.2的CA(K)或CC(T)测量?位置在焊连接部(铜箔?)测量?固定?式采?耐热胶带?
3. 温度分布
A B C D E F G H I回流焊
次数
260℃230℃180℃150℃ 2 min.--40s- 1 time
(1) 上述条件,为印刷电路板的零部件贴装?上的温度,根据电路板的材质,??,厚度等,电路板温度和开关表?温度会有很?的不同,关于开关表?温度,也请在上述条件内使?。
(2) 根据回流槽的种类,条件稍有不同,请事先充分进?确认之后使?。
??焊接?式的参考举例
烙铁头温度350±5℃
焊接时间3s max.
焊接次数 1 time
表?本系列共通的注释。
1. 本产品?录中产品的颜?,与实物的颜?有所差异。
2. 关于载带品的试制数量,请以最?订货单位(1卷,1箱)的N倍订货。
增量型编码器与绝对型编码器的区分 编码器如以信号原理来分,有增量型编码器,绝对型编码器。 增量型编码器 (旋转型) 工作原理: 由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。 由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。 编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。 分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。 信号输出: 信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL 也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。 如单相联接,用于单方向计数,单方向测速。 A.B两相联接,用于正反向计数、判断正反向和测速。 A、B、Z三相联接,用于带参考位修正的位置测量。 A、A-, B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。 对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。 对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
编码器的选型及技术解答 一、问:增量旋转编码器选型有哪些注意事项? 应注意三方面的参数: 1.机械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。 2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。 3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。其输出方式应和其控制系统的接口电路相匹配。 二、问:请教如何使用增量编码器? 1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。 2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用TTL电平,A脉冲在前,B脉冲在后,A,B脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。一般利用A超前B或B 超前A进行判向,增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90°。也有不相同的,要看产品说明。 3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。 4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。 5,在电子装置中设立计数栈。 增量型编码器与绝对型编码器的区分:编码器如以信号原理来分,有增量型编码器,绝对型编码器。 增量型编码器(旋转型)工作原理:由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。编码器码盘的材料有玻璃、金属、塑料;玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级。塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。 分辨率:编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。 信号输出:信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 信号连接:编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。如单相联接,用于单方向计数,单方向测速。A.B两相联接,用于正反向计数、判断正反向和测速。A、B、Z三相联接,用于带参考位修正的位置测量。A、A-,B、B-,Z、
编码器选型有哪些注意事项 ■一.※有网友问:增量旋转编码器选型有哪些注意事项? 应注意三方面的参数: 1.械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。 2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。 3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。其输出方式应和其控制系统的接口电路相匹配。 ■二.※有网友问:请教如何使用增量编码器? 1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。 2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用TTL 电平,A脉冲在前,B脉冲在后,A,B脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。一般利用A超前B或B超前A进行判向,我公司增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90°。也有不相同的,要看产品说明。 3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。 4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。 5,在电子装置中设立计数栈。 ■三.※关于户外使用或恶劣环境下使用 有网友来email问,他的设备在野外使用,现场环境脏,而且怕撞坏编码器。 我公司有铝合金(特殊要求可做不锈钢材质)密封保护外壳,双重轴承重载型编码器,放在户外不怕脏,钢厂、重型设备里都可以用。 不过如果编码器安装部分有空间,我还是建议在编码器外部再加装一防护壳,以加强对其进行保护,必竟编码器属精密元件,一台编码器和一个防护壳的价值比较还是有一定差距的。■四.※从接近开关、光电开关到旋转编码器: 工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用。可是,随着工控的不断发展,又有了新的要求,这样,选用旋转编码器的应用优点就突出了:信息化:除了定位,控制室还可知道其具体位置; 柔性化:定位可以在控制室柔性调整; 现场安装的方便和安全、长寿:拳头大小的一个旋转编码器,可以测量从几个μ到几十、几百米的距离,n个工位,只要解决一个旋转编码器的安全安装问题,可以避免诸多接近开关、光电开关在现场机械安装麻烦,容易被撞坏和遭高温、水气困扰等问题。由于是光电码盘,无机械损耗,只要安装位置准确,其使用寿命往往很长。 多功能化:除了定位,还可以远传当前位置,换算运动速度,对于变频器,步进电机等的应用尤为重要。 经济化:对于多个控制工位,只需一个旋转编码器的成本,以及更主要的安装、维护、损耗成本降低,使用寿命增长,其经济化逐渐突显出来。 如上所述优点,旋转编码器已经越来越广泛地被应用于各种工控场合。 ■五. ※关于电源供应及编码器和PLC连接: 一般编码器的工作电源有三种:5Vdc、5-13 Vdc或11-26Vdc。如果你买的编码器用的
1. 编码器的特点及用途 编码器是通过把机械角度物理量的变化转变成电信号的一种装置;在传感器的分类中,他归属于角位移传感器。 根据编码器的这一特性,编码器主要用于测量转动物体的角位移量,角速度,角加速度,通过编码器把这些物理量转变成电信号输出给控制系统或仪表,控制系统或仪表根据这些量来控制驱动装置。 2. 编码器的主要应用场合: 2.1数控机床及机械附件。 2.2 机器人、自动装配机、自动生产线。 2.3 电梯、纺织机械、缝制机械、包装机械(定长)、印刷机械(同步)、木工机械、塑料机械(定数)、橡塑机械。 2.4 制图仪、测角仪、疗养器雷达等。 最常用的有两种:绝对值编码器和增量式编码器。 信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 传感器电源电压一般分为:5V和24V。信号类型: 1、A/B/Z型 2、RS422差分 3、SSI(格雷码) 信号有正弦波的,有方波的。 信号有电流型的,有电压型的 另外SSI编码器输出除了格雷码,也有二进制码的。电压的范围也不仅限于5V和24V 3. 基本原理
3.1 构造 编码器主要是由码盘(圆光栅、指示光栅)、机体、发光器件、感光器件等部件组成。 (1)圆光栅是由涂膜在透明材料或刻画在金属材料上的成放射状的明暗相间的条纹组成的。一个相邻条纹间距称为一个栅节,光栅整周栅节数就是编码器的脉冲数(分辨率)。(注:本公司码盘有三种金属、玻璃、菲林(类似塑料) 三种)。 (2)指示光栅是一片固定不动的,但窗口条纹刻线同圆光栅条纹刻线完全相同的光栅片。 (3)机体是装配圆光栅,指示光栅等部件的载体。 (4)发光器件一般是红外发光管。 (5)感光器件是高频光敏元件;一般有硅光电池和光敏三极管。 3.2 工作原理 由圆光栅和指示光栅组成一对扫描系统,在扫描系统的一侧投射一束红外光,在扫描系统的另一侧的感光器件就可以收到扫描光信号;当圆光栅转动时,感光器件接收到的扫描光信号会发生变化,感光器件可以把光信号转变成电信号并输出给控制系统或仪表。 一般编码器的输出信号为两列成90度相位差的Sin信号和Cos信号(这是由指示光栅的窗口条纹刻线保证的);这些信号的周期等于圆光栅转过一个栅节(P)的移动时间,对Sin信号和Cos信号进行放大及整形就可输出方波脉冲信号。 4. 应用举例 编码器的应用场合十分的广泛,在此列举几个简单事例: (1) 数控机床对加工工件自动检测就是通过编码器来进行检测的:数控机床刀架的对零校准也是通过编码器来实施的。 (2) 编码器在PLC上的应用:一般PLC上都有高速信号输入口,编码器可以作为高速信号输入元件,使PLC更加迅速和精准地实施闭环控制。而在变频器上其一般接变频器的PG卡上。
西门子伺服电机选择手册,SINAMICS S120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。普通异步电动机不能控制转矩,也不能控制三相异步电动机。 S120系列驱动与伺服电机选型手册第1部分:典型结构的多轴驱动控制单元电机模块与通用直流母线电源模块。带起动机(或scout)和SIMATIC manager软件或s7-300400的书本式柜式PC典型配置图,SIMOTION O/D/P 24 V DL说明:1:主控制模块cu320 2:电源模块SIM 或ALM+24 V电源3:单轴电机模块4:两轴电机模块234电源线终端模块驱动Cliq编码器反馈信号线选项板电抗器功率滤波器传感器模块无编码器电机运动控制,带drivc Cliq接口西门子(中国)自动化传动集团有限公司生产机械SINAMICS S120系列,选自《S120驱动与伺服电机选型手册》第1章多轴传动概述。Sinamics120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。它不仅可以控制普通的三相异步电动机,还可以控制步进电动机、转矩电动机和直线电动机。其强大的定位功能将实现进给轴的绝对和相对定位。2007年6月发布的DCC(drive control chart)功能将实现逻辑、计算和简单处理功能。SINAMICS S120产品包括:用于普通直流母线的DCAC逆变器和用于单轴的ACAC逆变器。具有公共直流母
线的DC/AC逆变器也称为多轴驱动。它的结构是电源模块和机器模块分开。电源模块将三个交流电整流成540V或600DC,并将电机模块(一个或多个)连接到直流母线。特别适用于多轴控制,特别适用于造纸、包装、纺织、印刷、钢铁等行业。优点是电机轴间能量共享,接线方便简单●单轴控制交流变频器,俗称单轴交流传动,其结构是功率模块和电机模块的组合,特别适合单轴速度和定位控制。本书第一部分包括第1至4章,主要介绍多轴交流传动。第二部分包括第五章至第八章,主要介绍单轴交流传动。第三部分包括第九章,主要介绍电机电缆和信号电缆。第四部分包括第10章,介绍了同步和异步伺服电机的指令数据。第五部分,包括第11章,简要介绍了运动控制系统的指令数据。这本书中的技术资料基本上是英文的。详情请参阅英文原文。西门子(中国)有限公司自动化与传动集团运动控制部生产的机械系列S120系列,源自《S120驱动与伺服电机选型手册》第二章。功率模块是我们通常所说的整流器或整流器/反馈单元。它将三相交流电整流成直流电,并为每个抑制模块(通常称为逆变器)供电。具有反馈功能的模块还可以向电网提供直流电。根据是否有反馈功能和反馈方式,将功率模块分为以下三类:基本线路模块:整流单元,但无反馈功能。智
ST 系列交流伺服电机型号编号说明 1:表示电机外径 , 单位 :mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位: rpm。 6:表示电机适配的驱动器工作电压,L— AC220V, H— AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T ), R— 1 对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示 IPM 模块的额定电流( 15/20/30/50/75A ) 3:表示功能代码( M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机ST系列电机ST 系列电机主要参数 适配驱动器 额定功率 电机型号额定转矩额定转速外形尺寸零售价 ( 元 ) 110ST-M02030 2 Nm 3000rpm 110×110×158 1500 110ST-M04030 4 Nm 3000rpm 110×110×185 1700 110ST-M05030 5 Nm 3000rpm 110×110×2001800 110ST-M06020 6 Nm 2000rpm SD15M 110×110×217 1900 SD20MN 110ST-M06030 6 Nm 3000rpm SD30MN 110×110×217 1900 SD50MN 130ST-M04025 4 Nm 2500rpm SD75MN 130×130×163 1800 130ST-M05025 5 Nm 2500rpm 130×130×171 2100 130ST-M06025 6 Nm 2500rpm 130×130×181 2400 130ST-M07720Nm2000rpm130×130×1952900
增量式编码器的A.B.Z 编码器A、B、Z相及其关系
TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系? 对于这个问题的回答我们从以下几个方面说明: 编码器只有A相、B相、Z相信号的概念。 所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三 相主回路供电。 而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。 当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。从而由此判断主轴是正转还是反转。 另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。 带U、V、W相的编码器,应该是伺服电机编码器 A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的 时候也能正常使用。 ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个; UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。 /#############################################################
@Q发表于:2013/10/14 16:50:08 标签(TAG):编码器绝对值编码器选型 (绝对值编码器问答集节选) 本人正在编写一部《绝对值编码器问答集》的小册子,以下是部分节选。——根据实际使用要求判断是否需要选用绝对值编码器,根据已有的设备信号接口选择选什么样的编码器 1,使用绝对值编码器一定会比用增量式编码器贵吗? 没有!从编码器器件成本上说增量编码器内部器件少,成本价格确实低,但是从编码器的如何使用并产生效果的角度说,绝对值编码器如果选型得当,其使用的效果带来的综合成本,会低于选用增量值编码器,为使用者大大节省成本。2,什么情况下要选绝对值编码器? a.停电移动、惯性滑动的数据安全可靠性问题,对于一些需要高度、长度测量的安全性设备、较大型设备、起重类工程类设备,安全性是很重要的因素,为确保编码器数据的稳定可靠性,必须选用全行程绝对值编码器。这类应用如果发生编码器数据错误可能引起的损失远远超过了编码器成本本身。例如水闸、工程机械、起重机、电梯、门机等等的高度、长度测量。 b.信号抗干扰问题,有时所化的人工成本远远大于一个编码器成本,增量信号较易受到各种干扰,数据采集不稳定,对于各种现场不可预知的干扰会花很多精力去排查,并要设法避开干扰,此情况下应考虑更换绝对值编码器。例如各种自动化工程项目,对于现场的变频器、开关电源、接地状况不明的情抗下,无从判断干扰情况,选用绝对值编码器可以确保应对各种工况条件。 c.后续设备节省资源,增量编码器需要高速计数不停的计数,耗费CPU资源,有时多个编码器连接没有更多的高速计数口,此时选用绝对值编码器的串行输出(如RS485)或总线型输出,其实是节省了后续设备的资源而节省费用。例如需要多个编码器比较的同步纠偏、多个编码器联动操作的流水线、加工机械等。 d.环境较恶劣的选择,增量编码器绝大部分是光学式的,易受水气灰尘及振动影响而损坏,选用磁电式绝对值编码器(单圈或真多圈)的可以避免这种损坏,而大大提高产品使用的寿命,而得到综合效果更佳,使用成本更低。例如户外使用的港口矿山机械、工厂的快速开门机等。 e.节省综合成本,在一些不便于停机修正、更换、维修,或停机修正、更换、维修成本很高的场合下,用绝对值编码器,因其数据的可靠性、产品的耐用性,可以大大减少售后服务人工成本,产品可长时间的使用效果,直接的是产品使用的综合成本大大的节省了。例如一些高速运转的流水线、较远地区的管网系统(电动执行器)。 。。。。。 3.按绝对值编码器输出信号接口有哪些信号输出可选? 选择使用绝对值编码器,首先要根据自身所有的后续接受设备(例如PLC)有什么样的信号接口,根据已有的信号接口选择编码器:
台达伺服电机ecma手册选型直角行星减速机蜗轮蜗杆减速机松下三菱台达西门子安川 KFR系列直角伺服行星减速机: 具有高精度、高钢性、高负载、高效率、高速比、高寿命、低惯性、低振动、低噪音、低温升、外观美、结构轻小、安装方便、精确定位等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。适合于全球任何厂商所制造的驱动产品连接,如:松下、台达、安川、富士、三菱、三洋、西门子、施耐德、法那克、科比、科尔摩根、AMK、帕克等等。 KFR系列直角伺服行星减速机: 为经济型与实用型设计,型号分:KFR40、KFR60、KFR90、KFR115、KFR140、KFR160机座型号。速比:3~100有20种比速可选择;分一、二减速传动;精度:一级传动精度在6-12弧分,二级传动精度在8-15弧分,等500多种规格。 应用领域: 伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。如:印刷机床、火焰切割、激光切割、数控机床、工具机械,食品包裝、自动化产业、工业机器人、和自动化的机电产品行业。 性能和特点: KFR系列直角伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。使用终身免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。 KFR系列伺服减速机性能参数:
KFR系列伺服减速机转动惯量:
光电编码器选型及同步电机转速和 转子位置测量3 于庆广 刘葵 王冲 袁炜嘉 钱炜慷 张程 清华大学 摘要:光电轴角编码器,又称光电角位置传感器,是电气传动系统中用来测量电动机转速和转子位置的核心部件。对绝对式、增量式和混合式光电轴编码器的工作原理进行了综述,介绍了光电轴编码器的选型原则、转子速度的测量和转子位置的测量方法。最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。 关键词:光电轴编码器 混合式轴编码器 同步电机转子位置 Choice of Optical2encoder and Measure of Speed and R otor Place of Synchronous Motor Yu Qingguang Liu Kui Wang Chong Yuan Weijia Qian Weikang Zhang Cheng Abstract:Optical2encoder,which is also called photoelectric angei2position sensor,is the core device in measurement of motor speed and rotor position in drive system.There summarize the operating principle of ab2 solute、incremental and hybrid encoder,introduce the choice principle of optical2encoder model and the measur2 ing method of rotor speed and rotor position.The implementation of measuring method of rotor speed and ro2 tor position in variable frequency speed2regulated system of synchronous motor is also given. K eyw ords:optical2encoder hybrid2encoder rotor place of synchronous motor 1 引言 光电轴角编码器,又称轴编码器或光电角位置传感器。光电轴编码器以高精度计量圆光栅为检测元件,通过光电转换,将输入的角位置信息转换成相应的数字代码,并与计算机等控制器及显示装置相连接,实现数字测量、数字控制与数字显示[1]。光电轴编码器具有较高的性能价格比,已普遍应用在雷达、光电经纬仪、地面指挥仪、机器人、数控机床和高精度闭环调速系统等诸多领域,是电动机等自动化设备理想的角度和速度传感器。轴编码器主要分为增量式、绝对式与混合式3种,其中增量式轴编码器主要用于测量转子速度,绝对式轴编码器主要用于测量转子的空间位置,混合式轴编码器是增量式轴编码器与绝对式轴编码器的组合。后端加入处理芯片之后,3种轴编码器都具有测量转子速度与空间位置的功能。本文综述了光电轴编码器的种类和选型原则,介绍了转速和转子位置的测量方法;最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。 2 光电轴编码器 2.1 增量式轴编码器 典型的光电轴角编码器结构原理如图1 所示。 图1 光电轴编码器结构图 71 3清华大学大学生SR T项目(031T0144)
光电编码器的计数方法 点击次数:543 发布时间:2009-7-6 14:27:22 1 引言 在位置控制系统中,为了提高控制精度,准确测量控制对象的位置是十分重要的。目前,检测位置的办法有两种:其一是使用位置传感器,测量到的位移量由变 送器经A/D转换成数字量送至系统进行进一步处理。此方法虽然检测精度高,但在多路、长距离位置监控系统中,由于其成本昂贵,安装困难,因此并不适用;其二 是使用光电编码器[1]。光电编码器是高精度控制系统常用的位移检测传感器。当控制对象发生位置变化时,光电编码器便会发出A、B两路相位差90度的数字脉冲信号。正转时A超前B90度,反转时B超前A90度。脉冲的个数与位移量成比例关系,因此通过对脉冲计数就能计算出相应的位移。该方法不仅使用方便、测量准确, 而且成本较低,因此在电力拖动系统中,经常采用第二种位置测量方法。 使用光电编码器测量位移,准确无误的记数起着决定性作用。由于在位置控制系统中,电机既可以正转,又可以反转,所以要求计数器既要能够实现加计数,又 要能够实现减计数。相应的计数方法可以用软件来实现,也可以用硬件来实现。 使用软件方式对光电编码器的脉冲进行方向判别和计数降低了系统控制的实时性,尤其当使用光电编码器的数量较多时,并且其可靠性也不及硬件电路。但是用 软件计数外围电路比较简单,所以在计数频率不高的情况下,使用软件计数还是有一定优势的。对编码器中输出的两路脉冲进行计数主要分两个步骤,首先要对编码器输出的两路脉冲进行鉴相,即:判别电机是正转还是反转;其次是进行加减计数,正转时加计数,反转时减计数。 2 鉴相原理 脉冲鉴相的方法比较多,既可以用软件实现,也可以用一个D触发器实现。下图是编码器正反转时输出脉冲的相位关系。 由图中编码器输出波形可以看出,编码器正转时A相超前B相90度.在A相脉冲的下降沿处,B相为高电平;而在编码器反转时,A相滞后B相90度,在A相脉冲的下降沿处,B相输出为低电平。这样,编码器旋转时通过判断B相电平的高低就可以判断编码器的旋转方向[2]。 3 用软件实现脉冲的鉴相、计数 编码器输出的A向脉冲接到单片机的外部中断INT0,B向脉冲接到I/O 端口P1.0。当系统工作时,首先要把INT0设置成下降沿触发,并开相应中断。当有有效脉冲触发中断时,进行中断处理程序,判别B脉冲是高电平还是低电平,若是高电平则编码器正转,加1计数;若是低电平则编码器反转,减1计数。 4 用硬件实现脉冲的鉴相、计数 硬件计数在执行速度上有软件计数不可比拟的优势,通常采用多个可预置4位双时钟加减计数器74LS193 级联组成的加减计数电路。P0-P3为计数器的4位预置数据端,与数据输入锁存器相接;QA-QD 为计数器的4位数据输出端,与数据输出缓冲器相接;MR为清零端与上电清零脉冲相接;PL为预置允许端,由译码控制电路触发;CU 为加脉冲输入端,CD为减脉冲输入端;TCU为进位输出端,TCD 为借位输出端。如下图所示:
西门子伺服电机_蜗轮蜗杆减速机西门子伺服电机选型手册 性能特点 1.ANRV系列采用单级蜗轮蜗杆传动,也可由两种机座号配合成双级减速传动。 2.箱体、法兰盘、端盖等零件采用优质铝合金压铸而成,外形轻巧美观、结构紧凑、体积小、重量轻,节省安装空间,且不易锈蚀。3.配套电机采用铝壳电机,散热性能好,安全可靠、效率高、传动平稳、振动小、噪音低。 4.配套动力输出及转矩输出的多种连接结构,满足各种连接需要;箱体外形设计及底脚孔设置布局适应多种安装方式,通用性强。5.箱体上设置加油孔和放油孔,润滑油定期更换,不宜损耗变质,便于维护保养。 6.由单级蜗杆减速器组合而成的双级蜗杆减速机,具有单级蜗杆减速机的一切优点,可获得较大的传动比。 7.根据用户需要可提供本样本之外的速比和结构形式。 场所条件 1.环境温度在-40℃~50℃条件下额定运行。(0℃以下启动时润滑油要加热到0℃以上) 2.海拔不超过1000m。 3.输入转速不大于1500r/min。 4.可用于正反运转,无行业限制 ANRV系列蜗轮蜗杆减速电动机型号说明 型号说明 1.ANRV—蜗轮蜗杆减速机产品代码。 2.整机结构:无代码…单级E…双级。 3.入轴连接方式:无代码…单输入轴B…双输入轴D…带电机输入法兰 DB…一端带输入轴,一端带电机输入法兰。 4.产品规格:单级以蜗轮副中心距表示,如75。 双级以两对蜗轮副中心距表示,如40/63。 5.安装型式:单级有B3、B6、B7、B8、V5、V6六种。 双级有AS1、AS2、BS1、BS2、VS1、VS2、PS1、PS2八种。 6.电机功率:配用Y2、YS系列电机,由B5、B14两种安装型式,如2.2(B14)。(如带输入法兰而没有电机,只填写电机安装型式)。 7.理论传动比:如i=20。 8.附件:A…单输出轴B…双输出轴D…防护罩 E…转矩臂F…输出法兰(ANRV40、50、63有F、FB、FL三种形式)。 型号标记
光电编码器基础 1.1概述 光电编码器是一种集光、机、电为一体的数字化检测装臵,它具有分辨率高、精度高、结构简单、体积小、使用可靠、易于维护、性价比高等优点。近10几年来,发展为一种成熟的多规格、高性能的系列工业化产品,在数控机床、机器人、雷达、光电经纬仪、地面指挥仪、高精度闭环调速系统、伺服系统等诸多领域中得到了广泛的应用。光电编码器可以定义为:一种通过光电转换,将输至轴上的机械、几何位移量转换成脉冲或数字量的传感器,它主要用于速度或位臵(角度)的检测。典型的光电编码器由码盘(Disk)、检测光栅(Mask)、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。 一般来说,根据光电编码器产生脉冲的方式不同,可以分为增量式、绝对式以及复合式三大类。按编码器运动部件的运动方式来分,可以分为旋转式和直线式两种。由于直线式运动可以借助机械连接转变为旋转式运动,反之亦然。因此,只有在那些结构形式和运动方式都有利于使用直线式光电编码器的场合才予使用。旋转式光电编码器容易做成全封闭型式,易于实现小型化,传感长度较长,具有较长的环境适用能力,因而在实际工业生产中得到广泛的应用,在本书中主要针对旋转式光电编码器,如不特别说明,所提到的光电编码器则指旋转式光电编码器。 1.2增量式光电编码器
1.2.1原理及其结构 增量式光电编码器的特点是每产生一个输出脉冲信号就对应于 一个增量位移,但是不能通过输出脉冲区别出在哪个位臵上的增量。它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位臵增量,不能够直接检测出轴的绝对位臵信息。一般来说,增量式光电编码器输出A、B两相互差电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。同时还有用作参考零位的Z相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。标志脉冲通常用来指示机械位臵或对积累量清零。 增量式光电编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成,如图1-1所示。码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期;检测光栅上刻有A、B两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线。它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电检测器件输出的信号在相位上相差电度角。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差电度角的近似于正弦波的电信号,电信号经过转换电路的信号处理,可以得到被测轴的转角或速度信息。增量式光电编码器输出信号波形如图1-2所示。
ON At SC.END SC 号菜单(其它参数一般不用设置)号菜单(其它参数一般不用设置)加大数值,曲线则陡。页码 标准编号 参数 名称 参数值 备注 ﹟0。**号菜单 0?03 加速斜率 0.5cm/s2 0?04 减速斜率 0.6cm/s2 ﹟1。**号菜单 1.06 为最高速度限值 一般设置为电机额定转速 ﹟2。** ﹟3。** 3.05 零速阀值 2 很重要,直接影响停车舒适感 3.08 超速限值 此值自动生成,根据1.06 3.25 编码器相位角 整定出的相位角,U V W 的位置 3. 29 变频器编码器位置 此参数很重要,自学习后断电送电检查是否改变 3.33 编码器转位 0 3.34 编码器脉从数 2048 3.36 编码器电压 5v 3.37 300 3.38 编码器的类型 3.39 编码器终端选择 1 3.40 错误检测级别 1 3.41 编码器自动配置 ﹟4。**号菜单(其它参数不用设置) 加大数值,曲线则陡。
页码 标准编号4.07 对称电流限值200% 4.11 转矩方式选择4 4.12 电流给定滤波器12ms降低电机噪音 4. 13 电流环比例增益自学习生成 4.14 电流环积分增益自学习生成 4.15 电极热时间常数89 4.23 电流给定滤波器110ms降低电机噪音, ﹟5。**号菜单(其它参数不用设置) 5.07 电机额定电流 A按铭牌设定 5.08 电机额定速度 Rmp按铭牌设定 5.09 电机额定电压 380V 5.11 电机极数 20 5.18 PWM开关频率选择 6K HZ ﹟6。**号菜单(不用设置) ﹟7。**号菜单(不用设置) 7.10=0 7.14=0 ﹟8。**号菜单(其它参数不用设置) 8.21 24端子功能选择10.02 运行使能(10.02变频器工作)8.22 25端子输入源18.38 相当于我们主板的多端速输出Y15 8.23 26端子输入源18.37 相当于我们主板的多端速输出Y14 8.24 27端子功能选择19.44 顺时针旋转(上升)8.25 28端子功能选择18.44 逆时针旋转(下降)可以通过18.45=1 改变运行方向 8.26 29端子输入源18.36 相当于我们主板的多端速输出Y13 8.31 24端子输入(出)选择ON 0:输入功能1:输出功能8.3225端子输入(出)选择OFF 0:输入功能1:输出功能﹟16**菜单(其他参数不用设置)
低压断路器用作交、直流线路的过载、短路保护,被广泛应用于建筑照明、动力配电线路、用电设备作为控制开关和保护设备,也可用于不频繁起动电动机以及操作或转换电路 1.种类 (1)万能式断路器 (2)塑料外壳式断路器 (3)电动斥力式限流断路器 (4)剩余电流保护断路器 (5)直流快速断路器 (6)灭磁断路器 2.低压断路器的选用要点 表示低压断路器性能的主要指标有分断能力和保护特性。 分断能力是指开关在指定的使用和工作条件及在规定的电压下接通和分断的最大电流值(kA)。 保护特性主要分为过电流保护、过载保护和欠电压保护三种。 (1)额定电压 断路器的额定电压应大于线路额定电压。主要是交流380V或直流220V的供电系统。按线路额定电压进行选择时应满足下列条件: (4-10-5) 式中——低压断路器的额定电压,V; ——线路的额定电压,V。 (2)额定电流 断路器的额定电流与过电流脱扣器的额定电流应大于线路计算负荷电流。当按线路的计算电流选择时,应能满足下式: (4-10-6) 式中——低压断路器的额定电流,A; ——线路的计算电流或实际电流,A。 如果环境温度低于+40℃,则电器产品温度每低1℃,允许电流比额定电流值增加0.5%。但增加总数不得超过20%。 10.5 低压断路器 断路器的保护定值 (1)长延时脱扣器的电流整定值,动作时间可以不小于10s;长延时脱扣器只能作过载保护。 (2)短延时脱扣器的电流整定值,动作时间约为0.1~0.4s;短延时脱扣器可以作短路保护,也可以作过载保护。 (3)瞬时脱扣器的电流整定值,其动作时间约为0.02s。瞬时脱扣器一般用作短路保护。 10.5 低压断路器 (3)瞬时过电流脱扣器的整定电流 瞬时脱扣器的动作时间为0.02s左右。 瞬时或短时过电流脱扣器的整定电流应能躲开线路的尖峰电流。 1)负载是单台电动机,整定电流按下式计算
光电编码器分类和选择 编码器Encoder为传感器(Sensor)类的一种,主要用来侦测机械运动的速度、位置、角度、距离或计数,除了应用在产业机械外,许多的马达控制如伺服马达、BLDC伺服马达均需配备编码器以供马达控制器作为换相、速度及位置的检出所以应用范围相当广泛。根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,分为增量式编码器和绝对式编码器。光电编码器是利用光栅衍射原理实现位移—数字变换的,从50年代开始应用于机床和计算仪器,因其结构简单、计量精度高、寿命长等优点,在国内外受到重视和推广,在精密定位、速度、长度、加速度、振动等方面得到广泛的应用。 a.增量式编码器特点: 增量式编码器转轴旋转时,有相应的脉冲输出,其计数起点任意设定,可实现多圈无限累加和测量。编码器轴转一圈会输出固定的脉冲,脉冲数由编码器光栅的线数决定。需要提高分辨率时,可利用 90 度相位差的 A、B 两路信号进行倍频或更换高分辨率编码器。 b. 绝对式编码器特点 绝对式编码器有与位置相对应的代码输出,通常为二进制码或 BCD 码。从代码数大小的变化可以判别正反方向和位移所处的位置,绝对零位代码还可以用于停电位置记忆。绝对式编 码器的测量范围常规为 0—360 度。 增量型旋转编码器
轴的每圈转动,增量型编码器提供一定数量的脉冲。周期性的测量或者单位时间内的脉冲计数可以用来测量移动的速度。如果在一个参考点后面脉冲数被累加,计算值就代表了转动角度或行程的参数。双通道编码器输出脉冲之间相差为90o。能使接收脉冲的电子设备接收轴的旋转感应信号,因此可用来实现双向的定位控制;另外,三通道增量型旋转编码器每一 圈产生一个称之为零位信号的脉冲。 增量型绝对值旋转编码器绝对值编码器为每一个轴的位置提供一个独一无二的编码数字值。特别是在定位控制应用中,绝对值编码器减轻了电子接收设备的计算任务,从而省去了复杂的和昂贵的输入装置:而且,当机器合上电源或电源故障后再接通电源,不需要回到位置参 考点,就可利用当前的位置值。 单圈绝对值编码器把轴细分成规定数量的测量步,最大的分辨率为13位,这就意味着最大可区分8192个位置+多圈绝对值编码器不仅能在一圈内测量角位移,而且能幸,J用多步齿轮测量圈数。多圈的圈数为12位,也就是说最大4096圈可以被识别。总的分辨率可达到25位或者33,554,432个测量步数。并行绝对值旋转编码器传输位置值到估算电子装置通 过几根电缆并行传送。 增量型→绝对型编码器 旋转增量值编码器以转动时输出脉冲,通过计数设备来计算其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备计算并记忆的
常用的编码器联轴器有以下几种 一、铝合金编码器联轴器 (1)采用铝合金材质制造,具有低惯性,体积小巧; (2)高柔性的弹性联轴器,可在较大程度上吸收安装偏差; (3)固定方式分夹紧式以及顶丝式两种; (4)公制或英制尺寸均可提供; (5)开槽方式有平行线和螺纹线两种。 二、不锈钢编码器联轴器 (1)采用不锈钢材质,能够承爱更大的传动扭矩; (2)刚性更高,无传动滞后性; (3)固定方式分夹紧式以及顶丝式两种; (4)公制或英制尺寸均可提供; (5)开槽方式有平行线和螺纹线两种。 三、聚氨酯编码器联轴器 (1)采用聚氨酯材质,转动惯极低; (2)柔性高; (3)具有良好电气绝缘性能; (4)公制或英制尺寸均可提供。 四、波纹管编码器联轴器 (1)超柔性的编码器联轴器; (2)体积小巧,转动惯量极低; (3)零间隙、耐腐蚀性强 (4)高扭矩刚性、卓越灵敏度和传递大的扭矩 (5)不锈钢波纹管结构容许偏心、偏角和轴向偏差 (6)顺时针与逆时针回转特性完全相同 (7)寿命长、终身免维护 (8)轴套材质:铝合金(可选不锈钢) (9)固定方式:顶丝固定
安装注意事项 1,不要将旋转编码器进行拆解,这样做将有损防油和防滴性能。防滴型产品不宜长期浸在水、油中,表面有水、油时应擦拭干净。 2,安装时不要给轴施加直接的冲击。 编码器轴与机器的连接,应使用柔性连接器。在轴上装连接器时,不要硬压入。即使使用连接器,因安装不良,也有可能给轴加上比允许负荷还大的负荷,或造成拨芯现象,因此,要特别注意。 轴承寿命与使用条件有关,受轴承荷重的影响特别大。如轴承负荷比规定荷重小,可大大延长轴承寿命。 3.电气接口,增量编码器输出方式常见有推拉输出(HTL),电压输出(E),集电极开路(C,常见C为NPN型管输出),长线驱动器输出(TTL)。绝对值编码器输出有:同步串行 SSI,profibus-dp总线,canopen总线,并行输出(推挽、集电极开路NPN、PNP型),4-20ma,RS485输出。其输出方式及最大信号电流应和其控制系统的接口电路相匹配。 4.电源电压,编码器供电电压应该与编码器额定工作电压相匹配。 编码器的输出介绍: 信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。 如单相联接,用于单方向计数,单方向测速。 A.B两相联接,用于正反向计数、判断正反向和测速。 A、B、Z三相联接,用于带参考位修正的位置测量。 A、A-, B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。 对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。 对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。 编码器分增量型编码器和绝对性编码器