基于单片机的交流串激电机速度控制【摘要】在工业控制系统中,电动机的调速尤其是交流电机的调速控制占有很大的比重。本研究设计了一种用可控硅结合相应的软硬件来实现串激电机速度控制的装置。该装置通过pid控制算法来调节零点信号与单片机发出的触发信号之间的延时时间从而来实现电机速度的调节。
【关键词】串激电机;单片机;pid控制
0.引言
随着电气时代的进程、工业化的快速发展以及科技的进步,电动工具也跟随其脚步更新换代,而电动机作为电动工具最主要元件,其性能、效率也一直受关注。基于串激电机使用方便、启动转矩大、效率高、调速方便,成本低等优点,目前市场上的电动工具以及家用电器已经大量使用了串激电机。
1.串激电机的特性
1.1串激电机的概念及特征
串激电机是一种交直流两用电机,即它能在直流电源下工作,又能在交流电源下工作,所以又称为通用电机或交直流两用电机。串激电机之所以被广泛用于电动工具是因为它具有以下几点优点:(1)使用方便。这种电机虽然具有直流电机的结构,但是可以交直流两用,所以使用电源方便。
(2)转速、效率、功率因数都很高,而且体积小,重量轻。其他交流电机的转速都与电源频率有关,而单项串激电机不受电源频
率限制,因此,电机转速可以设计很高。
(3)启动性能较好,易于在较宽的范围内进行平滑调试。
(4)启动转矩大,过载能力强。
(5)成本低。
单项串激电机的缺点是结构复杂,换向比直流电机困难,换向火花大,且换向后的速度达不到原先的速度,无线电干扰和震动噪声都较大,机械特性较软。
1.2 串激电机的工作原理
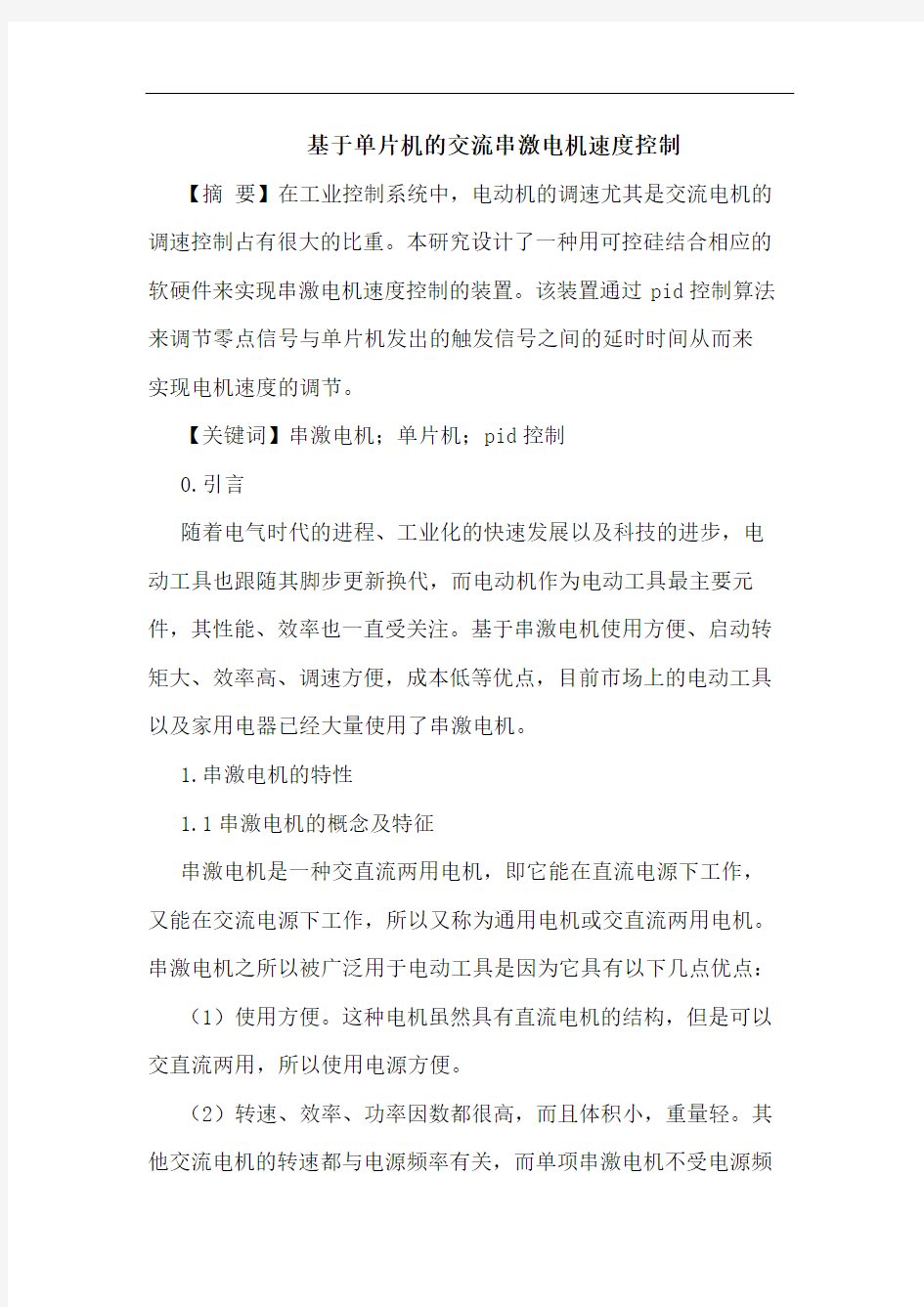
串激电动机的基本工作原理如图1所示。电流流经上部定子线圈,产生一定方向的磁场;然后经碳刷进入换向器(铜头),再在转子绕组中分成上、下并联支路流过,导流的转子线圈在外部磁场作用下产生力,从而使转子转动,铜头使转子中的电流始终保持上下对称、连续;电流最后从另一个碳刷出来进入下部定子。因上部与下部定子线圈绕线方向一致,致使上、下定子产生的磁场同向。
根据图1中(a)所示的磁通和电枢电流方向,由左手定则可知,电机的方向是逆时针,在(b)中电源的极性与(a)相反,但是磁通和电枢电流方向也同时改变,同理它的旋转方向也是不变。可见,串激电机的转向不会随电源的极性改变而改变。
2.串激电机速度控制
2.1硬件组成部分
系统硬件部分主要包括单片机最小系统、编码盘、光耦合器、数码管、双向可控硅、串激电机。本研究采用at89c51作为核心。
脉冲个数的检测、系统的控制、电机的调速控制等都由其控制。系统框图如图2所示。
2.2 调速控制系统设计
2.2.1 调速系统设计
由电机原理知道,小功率单相交流串激电动机的转速为:
在式(1)中,ce是常数,iα是电动机的负载电流,在负载不变的情况下,调节串激电动机转速的方式可以有以下三种:(l)改变电枢回路电阻r;(2)改变定子磁通;(3)改变电枢电压u。
在本调速系统中,通过控制单片机发出触发信号与零点信号的延时时间来调节可控硅的控制角,从而改变输出电压,最终实现串激电机的速度调整。设交流电压为:
u1=,则输出电压的有效电压为:
α为可控硅的控制角,当α不同时输出的有效值也不同。输出电压的有效值如表1所示。
双向可控硅的特点是导通后即使触发信号去掉,它仍将保持导通;当负载电流为零即交流电压过零点时,它会自动关断。所以需要在交流信号的每个半个周期都要送出触发信号,触发信号与零点信号之间的长度决定了可控硅导通角的大小从而来改变输出电压值来实现电机的速度。这段时间越长,导通角就越小,电机的速度越慢,反之速度越慢。零点信号提取原理如图3所示。(图中i/o 与单片机i/o口相连接)
中国地质大学长城学院 本科课程设计题目:基于80C51单片机的步进电机控制系统 系别信息工程系 学生姓名 专业电气工程及其自动化 学号 指导教师 职称讲师 2014 年6 月11 日
摘要 本文研究基于51系列单片机的步进电机控制系统设计,该系统包括以下几个部分:数据采集、数据处理、终端接收,该系统以汇编语言为单片机的驱动程序语言,单片机控制步进电机,主要任务是把二进制数变成脉冲序列,按相序输入脉冲以实现电机转动方向控制,利用单片机实现对步进电机的远距离实时监控,从而达到高效、节能的控制步进电机工作的目的,该系统具有成本低、控制方便的特点。使用单片机驱动四相步进电机,控制步进电机以四相八拍的方式运行,来实现步进电机正向/反向旋转,P1.0~P1.3分别控制步进电机;P1.5~P1.7分别控制步进电机的停止、正转、反转。 关键词:51单片机;步进电机;数据采集;汇编语言;
目录 摘要 0 1 设计目的 (1) 2设计内容与要求 (1) 3 总体设计方案 (1) 3.1整体方案 (1) 3.2具体方案实现 (1) 4系统硬件设计 (2) 4.1复位电路 (2) 4.2晶振电路 (2) 4.3按键电路 (3) 4.4指示灯电路 (3) 4.5驱动电路 (4) 4.6步进电机 (4) 5程序软件设计 (5) 5.1程序流程图 (5) 5.2源程序 (6) 6系统调试与仿真 (7) 7总结 (8)
1设计目的 1.掌握单片机控制步进电机的硬件接口电路。 2.掌握步进电机驱动程序的设计和调试方法。 3.熟悉步进电动机的工作特性。 2设计内容与要求 1.查阅资料,了解步进电机的工作原理。 2.通过单片机给定参数控制电机转动。 3.通过按钮控制正转、反转和停止。 3总体设计方案 3.1整体方案 本系统主要是由AT89C51,步进电机控制器ULN2004,步进电机,通过单片机编程,实现步进电机控制的脉冲分配,使电机实现正转,反转以及停止等功能 3.2具体实现方案 根据系统要求画出单片机控制步进电机的控制框图,见下图。系统包括单片机、按键、驱动电路和步进电机。 键盘80c51单片机 步进电机 驱动电路
题目:开关磁阻电机
开关磁阻电机 学习《特种电机及其控制》这门课程,这要介绍了无刷直流电机及其控制、开关磁阻电机及其控制系统、步进电机及其控制,其中我最感兴趣的开关磁阻电机。下面我将对我所了解的开关磁阻电机做一总结。 一、发展背景 开关磁阻电机是80年代初随着电力电子、微电脑和控制技术的猛烈发展而发展起来的一种新型调速驱动系统,具有结构简单、运行可靠及效率高等突出优点,成为直流电机调速系统、交流电机调速系统和无刷直流电机调速系统强有力的竞争者,引起各国学者和企业界的广泛关注,目前开关磁阻电机已开始应用于工业、航空业和家用电器等各个领域。 开关磁阻电机的基本概念可追溯到19世纪40年代,1842年,英国的Aberdeen和Dafidson用两个U型电磁铁制造了由蓄电池供电的机车电动机。20世纪60年代,大功率晶闸管的出现为SR电机的研究发展提供了重要的物质条件。1967年,英国的Leeds大学开始对SR电机进行深入研究;直到1970年左右,研究结果表明:SR电机可以在单相电流下四象限运行,功率变换器无论是用晶体管还是用普通晶闸管,所需开关数都是最少的;电动机成本也明显低于同容量的感应电动机。20年代70年代初,美国福特公司研制出最早开关磁阻电机的调速系统,其结构为轴向气隙电动机,具有电动机和发电机运行状态和较宽范围调速的能力,适合于蓄电池供电的电动车辆的转动。1980年Leeds大学的Lawrenson教授及其同事总结出了自己的研究成果,发表了题为“Variable--Speed Switched Reluctance Motors”的论文,系统阐述了开关磁阻电机的基本原理与设计特点,并得出了新型磁阻电机的单位出力可以与交流感应电机相媲美甚至还略占优势的结论。1983年英国TASC公司推出了Oulton系列通用SRD调速产品,问世不久便受到了各国电气传动界的广泛重视。从1984年开始,我国许多单位先后开展了SRD研究,在借鉴国外经验的基础上,我国SR电机的研究发展很快。2000年,国内100KW以上的SR电机已应用于煤矿的采煤机,目前已将180KW的SR电机应用于地铁机车的牵引,应形成一些SRD系列商品,最
Journal of Electrical Engineering 电气工程, 2016, 4(1), 55-62 Published Online March 2016 in Hans. https://www.doczj.com/doc/4814185448.html,/journal/jee https://www.doczj.com/doc/4814185448.html,/10.12677/jee.2016.41008 Speed Control Strategy of Switched Reluctance Motor Zhou Du1,2, Dingxiang Wu2,3, Lijun Tang1,2 1School of Physics and Electronic Sciences, Changsha University of Science & Technology, Changsha Hunan 2Hunan Province Higher Education Key Laboratory of Modeling and Monitoring on the Near-Earth Eletromagnetic Environments, Changsha Hunan 3Billion Set Electronic Technology Co, Ltd., Changsha Hunan Received: Mar. 1st, 2016; accepted: Mar. 19th, 2016; published: Mar. 24th, 2016 Copyright ? 2016 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). https://www.doczj.com/doc/4814185448.html,/licenses/by/4.0/ Abstract Aimed at research on starting mode and speed control of switched reluctance motor speed control system, a two-phase starting is adopted to start the electric, in order to increase the torque and reduce the torque ripple. A fuzzy adaptive PID control algorithm is proposed, and a switched re-luctance motor speed control system with STM32 + FPGA as the main controller is designed, ap-plying current chopping in low speed and angle position control mode in high speed, which has a certain effect on solving the problems of high overshoot, slow dynamic response and low accuracy. The experimental results show that the precision of the system speed is within 10 r/min, and the maximum overshoot is 15 r/min. Keywords Switched Reluctance Motor, Torque Ripple, Fuzzy Adaptive Tuning PID 开关磁阻电机速度控制 杜舟1,2,吴定祥2,3,唐立军1,2 1长沙理工大学物理与电子科学学院,湖南长沙 2近地空间电磁环境监测与建模湖南省普通高校重点实验室,湖南长沙 3长沙亿旭机电科技有限公司,湖南长沙
河南科技大学 课程设计说明书 课程名称现代电子系统课程设计题目_直流电机控制设计 学院__电子信息工程学院____班级_________ 学生姓名__________ 指导教师__________
日期_______ 课程设计任务书 (指导教师填写) 课程设计名称现代电子系统课程设计学生姓名专业班级 设计题目直流电机控制设计 一、课程设计目的 学习直流电机PWM的FPGA控制; 掌握PWM控制的工作原理; 掌握GW48_SOPC实验箱的使用方法; 了解基于FPGA的电子系统的设计方法。 二、设计内容、技术条件和要求 利用PWM控制技术实现直流电机的速度控制。 (1)基本要求: a.速度调节:4档,数字显示其档位。 b.能控制电机的旋转方向。 c.通过红外光电电路测得电机的转速,设计频率计用4位10进制显示电机的转速。 (2)发挥部分 a.设计“去抖动”电路,实现直流电机转速的精确测量。 b.修改设计,实现直流电机的闭环控制,旋转速度可设置。 c.其它。 三、时间进度安排 布置课题和讲解:1天 查阅资料、设计:4天 实验:3天 撰写报告:2天 四、主要参考文献 何小艇《电子系统设计》浙江大学出版社2008.1 潘松黄继业《EDA技术实用教程》科学出版社2006.10 齐晶晶《现代电子系统设计》实验指导书电工电子实验教学中心2009.8
指导教师签字:2010年12月30日 摘要 利用FPGA可编程芯片及VHDL语言实现了对直编程实现流电机PWM控制器的设计,对直流电机速度进行控制。介绍了用VHDL语言编程实现直流电机PWM控制器的PWM的产生模块、转向调节模块、转速控制模块、去抖动电路模块、电机转速显示等模块功能。 采用CPU控制产生PWM信号,一般的PWM信号是通过模拟比较器产生的,比较器的一端按给定的参考电压,另一端接周期性线性增加的锯齿波电压。当锯齿波电压小于参考电压时输出低电平,当锯齿波电压大于参考电压时输出高电平。改变参考电压就可以改变PWM波形中高电平的宽度。若用单片机产生PWM信号波形,需要通过D/A转换器产生锯齿波电压和设置参考电压,通过外接模拟比较器输出PWM波形,因此外围电路比较复杂。 FPGA中的数字PWM控制与一般的模拟PWM控制不同,用FPGA产生PWM波形,只需FPGA 内部资源就可以实现。用数字比较器代替模拟比较器,数字比较器的一端接设定值计数器输出,另一端接线性递增计数器输出。当线性计数器的计数值小于设定值时输出低电平,当计数值大于设定值时输出高电平。与模拟控制相比,省去了外接的D/A转换器和模拟比较器,FPGA外部连线很少,电路更加简单,便于控制。脉宽调制式细粉驱动电路的关键是脉宽调制,转速的波动随着PWM脉宽细分数的增大而减小。 直流电机控制电路主要由三部分组成: (1)FPGA中PWM脉宽调制信号产生电路。 (2)FPGA中的工作/停止控制和正/反转方向控制电路。 (3)由功率放大电路和H桥组成的正反转功率驱动电路 关键词
开关磁阻电机驱动系统的运行原理及应用(二) (低轴阻发电机参考资料) 1 引言 开关磁阻电机驱动系统(SDR)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,启动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率访问内都具有高输出和高效率而且有很好的容错能力。这使得SR电机系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。 SR电机是一种机电能量转换装置。根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能—电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能—发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。本文将从SR电机电动和发电运行这两个角度阐述SR电机的运行原理。 2 电动运行原理 2.1 转矩产生原理 控制器根据位置检测器检测到的定转子间相对位置信息,结合给定的运行命令(正转或反转),导通相应的定子相绕组的主开关元件。对应相绕组中有电流流过,产生磁场;磁场总是趋于“磁阻最小”而产生的磁阻性电磁转矩使转子转向“极对极”位置。当转子转到被吸引的转子磁极与定子激磁相相重合(平衡位置)时,电磁转矩消失。此时控制器根据新的位置信息,在定转子即将达到平衡位置时,向功率变换器发出命令,关断当
前相的主开关元件,而导通下一相,则转子又会向下一个平衡位置转动;这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的同转向的电磁转矩,使转子在一定的转速下连续运行;再根据一定的控制策略控制各相绕组的通、断时刻以及绕组电流的大小,就可使系统在最隹状态下运行。 图1 三相sr电动机剖面图 从上面的分析可见,电流的方向对转矩没有任何影响,电动机的转向与电流方向无关,而仅取决于相绕组的通电顺序。若通电顺序改变,则电机的转向也发生改变。为保证电机能连续地旋转,位置检测器要能及时给出定转子极间相对位置,使控制器能及时和准确地控制定子各相绕组的通断,使srm能产生所要求的转矩和转速,达到预计的性能要求。 2.2 电路分析
十二、直流电动机速度控制模型建立 如图所示,a R 和a L 分别为电枢回路电阻和电感,a J 为机械旋转部分的转动惯量,f 为旋转部分的粘性摩擦系统,)(t u a 为电枢电压,)(t n 为电动机转动速度,)(t i a 为电枢回路电流。 通过调节电枢电压)(t u a ,控制电动机的转动速度)(t n 。电动机负载变化为电动机转动速度的干扰因素,用负载力矩)(t M d 表示。 根据直流电动机的工作原理及基尔霍夫定律,直流电动机有四大平衡方程: (1)电枢回路电压平衡方程 )()()(t u E t i R dt t di L a a a a a a =++ 式中,a E 为电动机的反电势。 (2)电磁转矩方程 )()(t ia K t M a w = 式中,)(t M w 为电枢电流产生的电磁转矩,a K 为电动机转矩系数。 (3)转矩平衡方程 )()()()(t M t M t fn dt t dn J d w a +=+ 式中,a J 为机械旋转部分的转动惯量,f 为旋转部分的粘性摩擦系数。 (4)由磁感应关系,得 )(t n K E b a = 根据上述的四个平衡方程式,可建立起系统的输出量、干扰量与输入量之间的传递函数 b a a a a a a a a a K K f R s J R f L s L J K s U s N ++++=)()()(2 a a a a d R s L K s U s M +-=)()( 建立起直流电动机的结构图为
直流电动机参数为 Ω =0.2a R , 015.0,015.0,5.0===b a a K K H L ,Nms f 2.0=,202.0m kg J a ?=。 得到系统的阶跃响应曲线为
第二章开关磁阻电机及其调速系统 2.1 开关磁阻电机的发展概况 磁阻式电机诞生于160年前,一直被认为是一种性能不高的电机。然而通过近20年的研究与改进,使磁阻式电机的性能不断提高,目前已能在较大功率范围内不低于其它型式的电机[9]。 70年代初,美国福特电动机(Ford Motor)公司研制出最早的开关磁阻电机调速系统。其结构为轴向气隙电动机、晶闸管功率电路,具有电动机和发电机运行状态和较宽范围调速的能力,特别适用于蓄电池供电的电动车辆的传动。 70年代中期,英国里兹(Leeds)大学和诺丁汉(Nottingham)大学,共同研制以电动车辆为目标的开关磁阻电机调速系统。样机容量从10W至50KW,转速从750 r/min至10000 r/min,其系统效率和电机利用系数等主要指标达到或超过了传统传动系统。该产品的出现,在电气传动界引起了不小的反响。在很多性能指标上达到了出人意料的高水平,整个系统的综合性能价格指标达到或超过了工业中长期广泛使用的一些变速传动系统。 近年来,国内外已有众多高校、研究所和企业投入了开关磁阻电机调速系统的研究、开发和制造工作。至今已推出了不同性能、不同用途的几十个系列的产品,应用于纺织、冶金、机械、汽车等行业中。 目前,在汽车行业意大利FIAT公司研制的电动车和中国第二汽车制造厂研制的电动客车都采用了开关磁阻电机。SRM是没有任何形式的转子线圈和永久磁铁的无刷电动机,它的定子磁极和转子磁极都是凸的。由于SRM具有集中的定子绕组和脉冲电流,其功率变换器可以采用更可靠的电路拓扑形式。SRM具有简单可靠、在较宽转速和转矩范围内高效运行、控制灵活、可四象限运行、响应速度快、成本较低等优点,这是其它调速系统难以比拟的,作为具有潜力的电动车电气驱动系统日益受到重视。然而目前SRM还存在转矩波动大、噪声大、需要位置检测器、系统非线性等缺点,所以,它的广泛应用还受到限制。 2.2 开关磁阻电机的基本结构与特点 开关磁阻电机为定、转子双凸极可变磁阻电机。其定、转子铁心均由硅钢片
选购要点:伺服电机的三种控制方式 伺服电机速度控制和转矩控制都是用模拟量来控制的,位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求以及满足何种运动功能来选择。接下来,松文机电为大家带来伺服电机的三种控制方式。 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。 如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。 就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。 对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。 一般说驱动器控制的好不好,每个厂家的都说自己做的最好,但是现在有个比较直观的比较方式,叫响应带宽。当转矩控制或者速度控制时,通过脉冲发生器给他一个方波信号,使电机不断的正转、反转,不断的调高频率,示波器上显示的是个扫频信号,当包络线的顶点到达最高值的70.7%时,表示已经失步,此时的频率的高低,就能显示出谁的产品牛了,一般的电流环能作到1000Hz以上,而速度环只能作到几十赫兹。 换一种比较专业的说法: 1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。 应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。 2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
开关磁阻电机控制系统软件设计 开关磁阻电机SRM(Switched Reluctance Motor)是随着电力电子、微电脑和控制技术的迅猛发展而出现的一种新型调速系统,具有结构简单、运行可靠及效率高等突出优点,成为交流、直流和无刷直流电动机调速系统强有力的竞争者,引起各国学者和企业的广泛关注。 1 基本控制策略 开关磁阻电机基本控制策略主要包括电流斩波控制(CCC)、电压PWM 控制、角度位置控制(APC)三种控制策略。 电流斩波控制的优点是可限制电流峰值的增长,保护开关器件的安全,并起到良好有效的调节效果,因此适用于低速调速系统。当相电流超过约定的上限电流值时,则主开关关断,当相电流低于约定的下限电流值时,则组合开关开通,从而实现电流斩波控制效果。 电压PWM控制是通过调整占空比,来调节相绕组的平均电压,以改变相绕组电流的大小,从而实现转速和转矩的调节,电压PWM控制的特点是通过调节相绕组电压的平均值,进而能间接地限制和调节相电流,因此既能用于高速调速系统,又能用于低速调速系统,而且控制也较简单。 角度位置控制是指对开通角和关断角的控制。它的实质就在于输入电压保持不变而通过改变主开关的开通角和关断角来调节电流,以达到调节电机转矩的目的。角度控制的优点是转矩调节范围较大,可允许多相同时通电,以增加电机输出转矩,可实现效率最有控制和转矩
最优控制。 为了实现开关磁阻电机良好的调速性能,该软件设计采用以下组合控制策略,即电机基速以下运行时,采用电流斩波控制方式;在中低速下,采用电压PWM控制方式;而在高速运行时,采用角度位置控制方式。 2 软件设计 软件采用前后台系统作为软件框架,分为主程序和中断程序两部分,相较于现有控制系统软件设计中的多中断程序,该软件设计仅采用了一个定时中断,是程序更简洁,增加了程序的可读性及可移植性,同时也有利于程序的进一步扩充与完善。现有控制系统软件中多数使用多中断设计,其中包括计算电机转速使用的捕获中断,获取电机位置使用一路或两路外部中断,电流采样时使用的DMA中断,以及一至两个定时中断,这些中断不仅增加了程序的复杂性,同时也降低了软件的可靠性。 在软件设计中,重点和难点就是如何获得较好的斩波效果,而软件设计的好坏直接影响了斩波效果的好坏。在现有的软件设计中,一般是将各相电流通过ADC采样,再经DMA通道传输,同时产生一个DMA 中断,然后在一个定时中断(定时中断时间一般为50us至100us)中实现电流斩波。而这种设计会产生两个问题。其一,因为要实现其他功能,定时中断时间不能进一步缩短,而这对电流斩波而言,时间间隔又太长,以50us为例,电流可能会在50us的时间中上升40A。其二,DMA中断优先级要高于定时中断,这可能会导致定时中断的执
第一章:概述 直流电动机是人类发明最早和应用的一种电机。与交流电机相比,直流电机因结构复、维护苦难,价格昂贵等缺点制约了它的发展,应用不及交流电机广泛。但由于直流电动机具有优良的启动、调速和制动性能,因此在工业领域中仍占有一席之地。 转速调节的主要技术指标是:调速范围D和负载变化时对转速的影响即静差率,以及调速时的允许负载性质等(静差率就是表示在负载变化时拖动装置转速降落的程度。静差率越小,表示转速稳定性越好,对生产机械,如机床加工的零件,其加工的精度及表面光洁度就越高)。而直流电动机的突出优点是恰好是能在很大的范围内具有平滑,平稳的调速性能,过载能力较强,热动和制动转矩较大。 因此,从可靠性来看,直流电动机仍有一定的优势。 调节直流电动机转速的方法有三种: (1)电枢回路串电阻; (2)改变励磁电流; (3)改变电枢回路的电源电压; 而本文从另一个角度来阐述直流电机的速度控制,即利用自动控制中的反馈来调节电机的平稳运行以达到各项性能指标。
第二章:系统数学模型 本系统的简化方框图为: 其对应的原理图为: 控制系统的被控对象为电动机(带负载),系统的输出量是转速w ,参数亮是Ui 。控制系统由给定电位器、运算放大器1(含比较作用)、运算放大器2(含RC 校正网络)、功率放大器、测速发电机、减速器等部分组成。 工作原理为:当负载角速度ω和电动机角速度m ω一致的时候,反馈电压为0,电机处于平衡状态即电动机运行稳定。当负载的角速度收到干扰的作用时,ω和m ω失谐,控制系 统通过反馈电压的作用来改变m ω直到达到新的一致使系统恢复稳定,电机稳定运行。
2.1直流电动机的数学模型: 直流电动机的数学模型。直流电动机可以在较宽的速度范围和负载范围内得到连续和准确地控制,因此在控制工程中应用非常广泛。直流电动机产生的力矩与磁通和电枢电流成正比,通过改变电枢电流或改变激磁电流都可以对电流电机的力矩和转速进行控制。图2.2是一个电枢控制式直流电动机的原理图。在这种控制方式中,激磁电流恒定,控制电压加在电枢上,这是一种普遍采用的控制方式。 设为输入的控制电压 电枢电流 为电机产生的主动力矩 为电机轴的角速度 为电机的电感 为电枢导数的电阻 为电枢转动中产生的反电势 为电机和负载的转动惯量 根据电路的克希霍夫定理 (2-1) 电机的主动转矩 (2-2) 其中为电机的力矩常数。 反电势 (2-3) 式中为电机反电势比例系数 力矩平衡方程
开关磁阻电机特性的最优控制 摘要:本文介绍开关磁阻电机的特性,为获得电机或电机模拟转换的最大效率和电磁转矩的最小波动。控制曲线的变量—开通角和关断角(或是导通角),以及每一项的电压都可以通过一个简单的数学模型估算来获得。集中参数测量的模型需要考虑电机的磁路饱和,并且功率变换器参数的选择要确保系统的低功耗。共调查研究了两种典型开关磁阻电机,定转子齿数比分别为Ns/Nr=8/6 和6/4,310电源整流供电。时间曲线可以从数学模型和电机特性的最优估算得出,而且可以通过某种特殊的测试平台来验证其有效性。 关键字:磁阻电动机,模型,控制 绪论 对电力电子元件和设备的不断改进和其高速发展使得人们增强了对开关磁阻电机应用研究的兴趣。开关磁阻电机具有直流系列典型电机的特点,这使得它可以用于车辆的驱动部分。角速度的宽范围高效率调速使得它可以应用于大功率驱动和直流驱动。转子上无需供电并具有简单稳固的结构使得电机适用于超高速驱动。开关磁阻电机另一可取的特点是当电机停转时可直接控制电机的转子位置,也可以对开关磁阻电机进行转矩控制[2,6,7,10]。开关磁阻电机也有缺点,就是其在高速运行时会出现转矩脉动和振动[1]。 如图4所示,开关磁阻电机的一般功率变换结构都是一个不对称的半桥电路。电磁转矩的产生和电机定子绕组的电流方向无关,而且电机可实施()e T ,ω平面的四象限运行。对导通相通电的顺序可以改变电机的转向,相导通角的位置,是在提前与极轴还是落后与极轴决定着电机的启动/制动模式。角度控制和扭矩控制依赖于一下三个变量:开通角(on α),关断角(off α),或是导通角z α =on α-off α,相电压的控制方式是脉宽调制(PWM)模式。通过控制这三个变量,对他们不同的组合都可以在达到() T ,ω平面上的同一电机特性,但这会导致不同的电流,效率和转矩脉动[4, 5, 9, 10]。所以选择开关磁阻电机驱动系统的必备参数来找到最佳的控制特性是至关重要的。 在此论文中,研究用一种准最优控制方式控制开关磁阻电动机驱动来找到控制特性的最大效率和最小转矩脉动。实现这个目标需要用精确的原始的数学模型,在众多重复估算中具有简单、有效的特点,必须在动态过程中需找这个最佳控制特性。此集中参数测量模式要考虑到磁路的饱和,功率变换元器件的损耗以及因此对电机效率的影响。
电气与电子工程学院 单片机原理及应用课程设计报告 课题名称 专业班级 学 号 学生姓名 指导教师 评 分 2016年06月20日至06月24 日
目录 摘要 (3) 1设计任务 (4) 2方案 (6) 2.1 设计思路与方案 (6) 2.2总体设计框图 (6) 3系统实现的原理说明 (7) 3.1 步进电机控制工作原理 (7) 3.1.1步进电机的工作原理 (7) 3.1.2 步进电机的启停控制 (7) 3.1.3 步进电机的转向控制 (9) 3.2步数显示模块原理 (10) 4硬件设计 (11) 4.1系统总原理图 (11) 4.2各部分硬件原理图设计 (11) 4.2.1 单片机控制模块 (11) 4.2.2按键选择工作状态模块 (12) 4.2.3步进电机工作模块 (13) 4.2.4工作状态显示模块 (14) 4.2.5 4位数码管显示步数模块 (14) 5软件设计 (16) 5.1系统总体设计 (16) 5.2步进电机工作模块 (17) 5.2.1步进电机的工作方式说明 (17) 5.2.2设计说明及流程图 (18) 5.3数码管步数显示模块 (19) 6仿真调试记录 (21) 7心得体会 (22) 参考文献 (22) 附录:程序清单 (23)
摘要 本设计详细介绍了基于单片机的三相步进电机控制系统。步进电机通过输入脉冲信号进行控制,即电机的总转动角度由输入脉冲总数决定,因此,单片机通过向步进电机发送控制信号就能实现对步进电机的控制。 单片机实现的步进电机控制系统具有成本低、使用灵活的特点,该系统采用80C51单片机作为主控芯片,来完成对步进电机转动及LED显示的控制。 本设计主要由单片机80C51,3相步进电机,7段数码管,及一些其他相关元件设计而成,分为按键选择工作状态模块、步进电机工作模块、LED二极管显示工作状态模块以及4位数码管显示步数模块。可以通过开关来控制系统的启/停工作,当系统运转时,用开关来控制方向,并使相应的指示灯亮起,同样由开关来选择工作模式。运转时,用4位7段数码管来输出步数。最后根据思路所设计出来的硬件图设计相适应的软件。 电路结构简单,设计思路清晰,同时利用Proteus进行联调仿真,结果比较直观。仿真结果收到了预期的效果。 关键字:三相步进电机、单片机、PROTEUS仿真
开关磁阻电机 一、概述 开关磁阻电动机结构简单、可靠性高、恒转矩、恒功率而且调速性能好(覆盖功率范围10W~5MW的各种高、低速驱动调速系统)、价格便宜、鲁棒性好等优点引起了各国电气传动界的广泛重视,由其构成的调速系统兼有直流传动和普通交流传动的优点,是继变频调速系统、无刷直流电动机调速系统的最新一代无级调速系统。这种新型调速系统使开关磁阻电机存在许多潜在的领域,在各种需要调速和高效率的场合均能得到广泛使用。 开关磁组电机调速系统之所以能在现代调速系统中异军突起,主要是因为它卓越的系统性能,主要表现在: (1) 电动机结构简单、成本低、可用于高速运转。 (2)功率电路简单可靠。 (3)系统可靠性高。 (4)起动转矩大,起动电流低。典型产品的数据是:起动电流为额定电流的15%时, 获得起动转矩为100%的额定转矩;起动电流为额定电流的30%时,起动转矩叮 达其额定转矩的250%。 (5)适用于频繁起停及正反向转换运行。 (6)可控参数多,调速性能好。控制开关磁阻电动机的主要运行参数和常用方法至少 有四种:相导通角、相关断角、相电流幅值、相绕组电压。 (7)效率高,损耗小。以3kw SRD为例,其系统效率在很宽范围内都是在87% 以上,这是其它一些调速系统不容易达到的。 (8)可通过机和电的统一协调设计满足各种特殊使用要求。 二、开关磁阻电动机的结构 图1-1开关磁阻电机结构图
典型的三相开关磁阻电动机的结构如图1-1所示。其定子和转子均为凸极结构,图示电机的定子有8个极,转子有6个极。定子极上套有集中线圈,两个空间位置相对的极 上的线圈顺向串联构成一相绕组,图2-1中只画出了A相绕组;转子由硅钢片叠压而成,转子上无绕组。该电机则称三相8/6极开关磁阻电动机。在结构形式及工作原理上,开关磁阻电动机与大步距反应式步进电机并无差别;但在控制方式上步进电机应归属于他控式变频,而开关磁阻电动机则归属于自控式变频;在应用上步进电机都用作“控制电机”而开关磁阻电机则是拖动用电机,因此电机设计时所追求的目标不同而使电机的设计参数不同。 与反应式步进电动机相似,开关磁阻电动机是双凸极可变磁阻电动机。图1-1给出了以8/6极开关磁阻电机为例的结构原理图,图中仅给出了一相的绕组及外围功率开关电路,从这个结构原理图中可以清晰的看到,开关磁阻电动机是双凸极结构,其转子上没有任何形式的绕组,也无永磁体,而定子上只有简单的集中绕组,其中径向相对的两个绕组构成一相。电动机每一相中流过的电流是由外围功率开关电路中的开关根据转子位置的变化,进行相应的通断而获得的。 图1-1中给出的开关磁阻电动机是四相的,通常情况下开关磁阻电动机可以设计成多种不同相数的结构,如两相、三相、四相或更多相,当相数增加时其结构将变得更复杂,相应的外围电路所使用的器件也相应增加。开关磁阻电动机极数的设计也有多种形式,但是定、转子极数和相数要遵循一定的关系。即定子极数应为相数的2倍或2的整数倍; 而转子极数应不等于定子极数且一般转子极数少于定子极数但都是偶数极[2]。由于开关磁阻电动机相数与极数的设计,低于三相的电动机没有自起动能力,对于有自启动、四象限运行要求的驱动场合,应选用表1-1所对应的定、转子极数组合方案。 表2-1 开关磁阻电动机各种方案
直流电机转速控制 课程设计 姓名: 学号: 班级:
目录 1.直流电机转速控制方案设计 (2) 1.1设计要求 (2) 1.2设计框图 (2) 2.直流电机转速控制硬件设计 (3) 2.1主要器件功能 (3) 2.2硬件原理图 (6) 3.直流电机转速控制软件设计 (7) 4.调试 (8) 4.1硬件测试 (8) 4.2软件调试……………………………………………………………(11
1.直流电机转速控制方案设计 1.1设计要求 通过设计了解如何运用电子技术来实现直流电机转速控制,完成直流电机转向和转速的控制,提高分析电路设计、调试方面问题和解决问题的能力。 1、用按键1控制旋转方向,实现正转和反转。 2、电机的设定转速与电机的实际转速在数码管上显示。 3、旋转速度可实时改变。 1.2设计框图 本课题中测量控制电路组成框图如下所示: 图1
2.直流电机转速控制硬件设计 2.1主要器件功能 1、L298N 是专用驱动集成电路,属于H 桥集成电路,与L293D 的差别是其输出电流增大,功率增强。其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。此外可能通过使能端的高低电平的变换,从而使电机通断,来控制电机的转速。 图2 板上的EN1 与EN2 为高电平时有效,这里的电平指的是TTL 电平。EN1 为IN1 和IN2 的使能端,EN2为IN3 和IN4 的使能端。POWER 接直流电源,注意正负,电源正端为VCC,电源地为GND。 2、ZLG7290的核心是一块ZLG7290B芯片,它采用I2C接口,能直接驱动8位共阴式数码管,同时可扫描管理多达64只按键,实现人机对话的功能资源十分丰富。除具有自动消除抖动功能外,它还具有段闪烁、段点亮、段熄灭、
伺服电机的PLC控制方法 以松下Minas A4系列伺服驱动器为例,介绍PLC控制伺服电机的方法。伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本章简要介绍位置模式的控制方法 一、按照伺服电机驱动器说明书上的"位置
控制模式控制信号接线图"连接导线 3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC 的输出端子)。 5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。 7(com+)与外接24V直流电源的正极相连。 29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。 上面所述的六根线连接完毕(电源、编
码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。构成更完善的控制系统。 二、设置伺服电机驱动器的参数。 1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。 2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也
《单片机》期末考查(课程 设计) 论文题目:单片机直流电机控制系统的设计与仿真 学别:电气信息 班级: 姓名: 学号:1238230239 指导老师: 职称: 日期:2015 年1 月16 日
目录 第一章绪论................................................................................................................................................................ 1.1 W A VE6000软件说明.................................................................................................................................... 1.2 PROTEUS软件说明..................................................................................................................................... 1.2.1 软件的特点........................................................................................................................................ 1.2.2 ISIS智能原理图输入系统................................................................................................................. 1.3 MCS-51单片机系统简介.............................................................................................................................第二章总体方案设计................................................................................................................................................ 2.1 总体设计....................................................................................................................................................... 2.2 硬件设计....................................................................................................................................................... 2.2.1 硬件设计电路.................................................................................................................................... 2.2.2 PROTEUS软件使用过程.................................................................................................................. 2.2.3元器件清单如下................................................................................................................................. 2.3 软件设计....................................................................................................................................................... 2.3.1 PROTEUS硬件属性分配.................................................................................................................. 2.3.2程序设计............................................................................................................................................. 2.3.3编译成HEX文件步骤 ......................................................................................................................第三章综合测试........................................................................................................................................................ 3.1仿真工具栏................................................................................................................................................... 3.2 仿真结果.......................................................................................................................................................第四章总结鉴定........................................................................................................................................................参考文献 .....................................................................................................................................................................课程设计心得体会......................................................................................................................................................评阅老师:日期:..........................................................................................................................