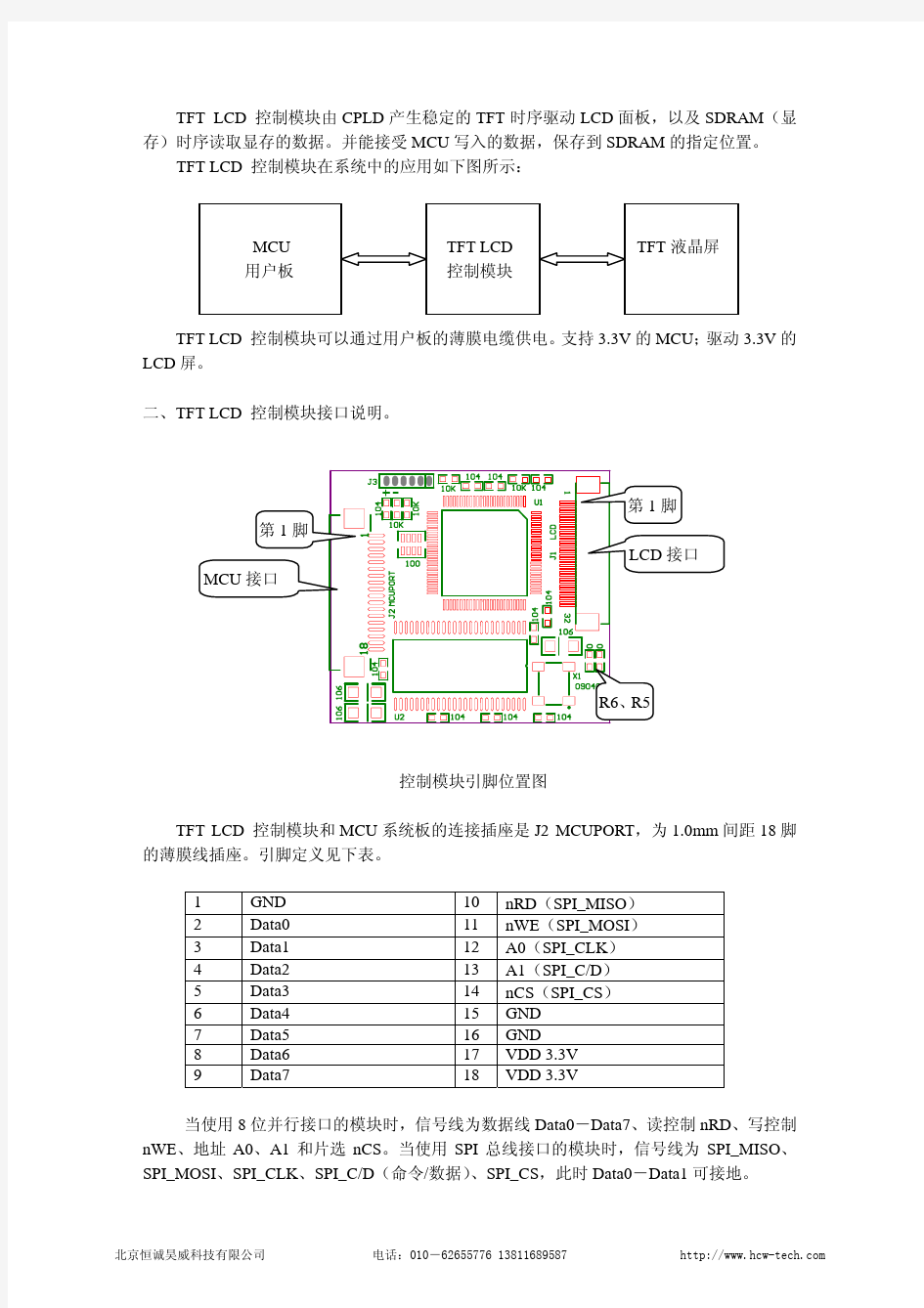
SPI接口设计与实现 SPI(SerialPeripheralInterface)总线是一种同步串行外设接口,它 可以使MCU与各种外围设备以串行方式进行通信以交换信息。SPI总线应用广泛,已经成为很多器件的标准配置,可以直接和各个厂家生产的 多种标准外围器件直接接口。其它常用的串行接口还有I2C、UART这 两种接口,这三种接口互有优缺点。与I2C接口相比,SPI接口速度更快、协议更简单、并且是全双工的,但连线也相对多一些。与UART接口相比,SPI更灵活,因为其使用主设备的时钟进行同步,所以两个比特之间 的时间间隔可以是任意的。在点对点的通信中,SPI接口不需要进行寻 址操作,且为全双工通信,显得简单高效。 1SPI总线工作原理 SPI总线一般以主/从模式工作,通常有一个主设备和一个或多个从设备,数据传输由主机控制,典型SPI结构框图如图1所示。SPI总线包含四条信号线,分别是sclk、miso、mosi和cs,其中,sclk为数据传输时钟,由主机产生;miso是从机输出,主机输入数据线;mosi是主机输出, 从机输入数据线;cs是从设备片选信号,由主机控制,当连接多个从设备时,通过该信号选择不同的从设备。SPI总线是按字节发送数据的,主机和从机内部都包含一个8位串行移位寄存器,在时钟信号控制下,寄存 器内的数据由高到低输出至各自的数据线,8个时钟后,两个寄存器内的数据就被交换了。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机 的传输。当主机发送一个连续的数据流时,可以进行多字节传输,在这 种传输方式下,从机的片选端必须在整个传输过程中保持低电平。 根据串行同步时钟极性和相位不同,SPI有四种工作方式。时钟极性(CPOL)为0时,同步时钟的空闲状态为低电平,为1时,同步时钟的空闲 状态为高电平。时钟相位(CPHA)为0时,在同步时钟的第一个跳变沿采 样数据,为1时,在同步时钟的第二个跳变沿采样数据。因为主设备时
spiFLASH芯片WQ的单片机驱动代码 #include "w25q80.h" // 注:W25Q80由256 BYTE 组成一个PAGE,不可PGAE擦除,可以进行BYTE PROGRAM 或者PAGE PROGRAM // 由16 PAGE 组成一个SECTOR,可SECTOR擦除 // 由16 SECTOR组成一个BLOCK,可BLOCK 擦除 // 由16 BLOCK 组成一个FULL MEMEORY,可FULL MEMORY 擦除 // 所以,总容量是1M bytes // W25Q80主要命令字 #define READ_ARRAY 0x03 #define SECTOR_ERASE 0x20 #define BYTE_OR_PAGE_PROGRAM 0x02 #define WRITE_ENABLE 0x06 #define WRITE_DISABLE 0x04 #define READ_STATUS_REGISTER 0x05 #define Manufacturer_DeviceID 0x9F // 定义W25Q80的CS脚对应MCU的IO #define W25Q80_CS P1_2 // SPI硬件初始化 void Spi_Init(void) { PERCFG |= 0x02; // SPI1映射到P1口 P1SEL |= 0xE0; // P15~P17作复用功能(clk mosi miso) P1SEL &= ~0x04; // P12作GPIO P1DIR |= 0x04; // P12作输出 P1_2 = 1; // P12输出高电平 U1CSR &= ~0xA0; // SPI主方式 U1GCR &= ~0xC0; // CPOL=0 CPHA=0 U1GCR |= 0x20; // MSB U1BAUD = 0; // 波特率设为sysclk/8 U1GCR |= 0x11;
#include "spi.h" ////////////////////////////////////////////////////////////////////////////////// //本程序只供学习使用,未经作者许可,不得用于其它任何用途 ////////////////////////////////////////////////////////////////////////////////// //以下是SPI模块的初始化代码,配置成主机模式,访问SD Card/W25Q64/NRF24L01 //SPI口初始化 //这里针是对SPI2的初始化 void SPI2_Init(void) { RCC->APB2ENR|=1<<3; //PORTB时钟使能 RCC->APB1ENR|=1<<14; //SPI2时钟使能 //这里只针对SPI口初始化 GPIOB->CRH&=0X000FFFFF; GPIOB->CRH|=0XBBB00000; //PB13/14/15复用 GPIOB->ODR|=0X7<<13; //PB13/14/15上拉 SPI2->CR1|=0<<10; //全双工模式 SPI2->CR1|=1<<9; //软件nss管理 SPI2->CR1|=1<<8; SPI2->CR1|=1<<2; //SPI主机 SPI2->CR1|=0<<11; //8bit数据格式 SPI2->CR1|=1<<1; //空闲模式下SCK为1 CPOL=1 SPI2->CR1|=1<<0; //数据采样从第二个时间边沿开始,CPHA=1 //对SPI2属于APB1的外设.时钟频率最大为36M. SPI2->CR1|=3<<3; //Fsck=Fpclk1/256 SPI2->CR1|=0<<7; //MSBfirst SPI2->CR1|=1<<6; //SPI设备使能 SPI2_ReadWriteByte(0xff);//启动传输 } //SPI2速度设置函数 //SpeedSet:0~7 //SPI速度=fAPB1/2^(SpeedSet+1) //APB1时钟一般为36Mhz void SPI2_SetSpeed(u8 SpeedSet) { SpeedSet&=0X07; //限制范围 SPI2->CR1&=0XFFC7; SPI2->CR1|=SpeedSet<<3; //设置SPI2速度 SPI2->CR1|=1<<6; //SPI设备使能 } //SPI2 读写一个字节
基于CPLD 的SP I 接口设计 D esign i ng SP I I n terface ba sed on CPLD 何永泰 (楚雄师范学院 楚雄 675000) 【摘 要】 根据SP I 同步串行接口的通信协议,介绍了在X ilinx Coo lR unnct XPLA 3CPLD 中利用V HDL 语言实现SP I 接口的设计原理和编程思想,通过用此接口,使得那些没有SP I 接口功能的微处理器和微控制器,也能通过SP I 接口与外围设备进行数据交换。 【关键词】 SP I 接口,CPLD ,接口扩展,接口设计,串行接口 ABSTRACT A cco rding to comm un icati on p ro toco l of SP I synch ronou s serial in terface ,th is paper p resen ts the design theo ry and p rogramm ing idea of i m p lem en ting SP I in terface w ith V HDL language in X ilinx Coo lR unner XPLA 3CPLD .T h is in terface can be u sed to data exchange w ith peri pheral apparatu s fo r m icrop rocesso r and m icrocon tro ller w h ich have no t SP I in terface functi on .KEYWOR D S SP I in terface ,CPLD ,in terface expan si on ,in terface design ,serial in terface 1 SP I 总线接口协议 SP I (Seri on Perp heral In terface )总线接口是一个 全双工,同步串行数据接口。许多微处理器,微控制器和外部设备具有这个接口。它能够实现在微控制器之间或微控制器与外部设备之间通信。SP I 总线通常有4条线组成,即:串行时钟线(SCK )、主机输出从机输入 线(M O S I )、 主机输入从机输出线(M ISO )和从机选择线SS N 。SCK 靠主机和数据流来驱动。M O S I 数据线从主机输出数据作为从机的输入数据。M ISO 数据线传送从机输出的数据作为主机的输入数据。在大多数情况下,使用一个SP I 作为主机,它控制数据向1个或几个从机传送。主机驱动数据从它的SCK 和M O S I 端到各从机的SCK 和M O S I 端,被选择的从机驱动数据从它的M ISO 端到主机的M ISO 端。SS N 控制线用于从机选择控制。 SCK 的相位和极性能改变SP I 的数据格式,时钟极性CPOL =‘0’,串行数据的移位操作由时钟正脉冲触发,时钟极性CPOL =‘1’,串行数据的移位操作由负脉冲触发;时钟相位CPHA =‘0’, 串行数据的移位 图1 CPHA =‘0’时SP I 的数据转换时序图 操作由时钟脉冲前沿触发,时钟相位CPHA =‘1’,串行数据的移位操作由时钟脉冲后沿触发。时钟相位CPHA =‘0’时SP I 的数据转换时序图如图1所示。 在图1中SCK 信号在第一个SCK 周期中的前半周期无效,在这种模式中,SS 的下降沿示意数据传送的开始,因此,SS 在连续串行字节之间必须被取反和重新申明。时钟相位CPHA =‘1’时SP I 的数据转换时序图如图2所示。 在图2中SCK 信号从无效电平到有效电平的第一边沿意味着在这种模式下数据传送的开始,SS 信号能保持有效的低电平在连续串行字节之间,这种模式用于只有一个主机和一个从机的系统中。 在SP I 传送数据时,8位数据从一个SP I 接口移出时,另一个SP I 接口也开始移出8位数据,这样主机的8位移位寄存器和从机的8位移位寄存器可以被看作是16移位寄存器,16位移位寄存器移动8个位置就实现了在主机和从机之间交换数据。基于CPLD 的SP I 接口设计中,从SP I 总线上接收的数据被保存在一个接收寄存器中,发送的数据被写到一个发送寄存器中 。 图2 CPHA =‘1’时SP I 的数据转换时序图 3 20040414收到,20040724改回 33 何永泰,男,1970年生,讲师,在读硕士,研究方向:电子工程设计。 ? 72?第17卷 第10期 电脑开发与应用 (总497)
关于使用STM32硬件SPI驱动NRF24L01+ 今天是大年初一总算有时间做点想做很久的事了,说到NRF2401可能很多电子爱好者都有用过或是软件模拟驱动又或是用单片机自带的硬件SPI来驱动,但不管是用哪种方法来驱动我想都在调试方面耗费了不少的时间(可能那些所谓的电子工程师不会出现这种情况吧!)网上的资料确实很多,但大多数都并没有经过发贴人认真测试过,有的只是理论上可以行的通但上机测试只能说是拿回来给他修改。本文作者也是经过无助的多少天才算是调试成功了(基于STM32硬件SPI,软件模拟的以前用51单片机已经调通了今天就不准备再拿来讲了,当然如果以后有朋友有需要也可以告诉我,我也可以重新写一篇关于51的驱动的只要有时间是没有问题的。)因为我用的是STM32F103C8T6的系统而且是刚接触不知道别的系统和我用的这个系统有多大的差别所以我不会整个代码全贴上来就完事了,我将就着重思路配合代码写出来,这样对于刚接触单片机的朋友会有很好的作用,但是还有一点请大家要原谅,可能会存在一些说的不好的地方,毕竟我没有经过正规渠道系统地学习过电子知识,对于前辈来说存在这样那样的问题不可避免的,在此也希望大家指教! 贴个图先:
NRF2401+的资料大家上网查一下,我输字的速度有点不好说!下面我来说一下整个调试流程吧 1.先把STM32串口一调通(因为我不知道STM32 I/O口不知可不可以像51那样并口输出数据,如果可以那就更方便啰)。 2.与NRF2401建立起通信(这个才是问题的关键);
3.利用读NRF2401的一个状态寄存器(STATUS)的值并通过串口发送到PC后通过51下载软件的串口助手显示出来(如果你用液晶来调试那你太有才了,你液晶和NRF2401存在牵连可能就会给寻找不成功的原因造成困难,而且还有不少硬件工作要做)在这说一下本文只调试发送程序,致于接收只改一个程序参数就行了。 我们先来调试STM32F103C8T6的串口1吧(也就是USART1)!它是STM32F103C8T6的片上外设之一,使用它时相对来说简单了不少。首先我要说一下我们要使用STM32的片上外设那么我们必须先对其进行初始化,实际上就是经过这段初始化代码让外设根据我们的要求来工作: void USART1_AllInit(void)//意思是USART1的所有初始化工作,我的英文不好所以可能涵数名可能也不怎么规范 { RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟,它是在APB2这条总线上的 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能GPIOA时钟,它也是在APB2这条总线上的,因为USART1要用到GPIOA的端口所以也要初始化 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
SPI 串行外设接口总线,最早由Motorola提出,出现在其M68系列单片机中,由于其简单实用,又不牵涉到专利问题,因此许多厂家的设备都支持该接口,广泛应用于外设控制领域。 SPI接口是一种事实标准,并没有标准协议,大部分厂家都是参照Motorola的SPI接口定义来设计的。但正因为没有确切的版本协议,不同家产品的SPI接口在技术上存在一定的差别,容易引起歧义,有的甚至无法直接互连(需要软件进行必要的修改)。 虽然SPI接口的内容非常简单,但本文仍将就其中的一些容易忽视的问题进行讨论。 SPI ( Serial Peripheral Interface ) SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。 时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI 接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。 SPI接口信号线 SPI接口共有4根信号线,分别是:设备选择线、时钟线、串行输出数据线、串行输入数据线。 设备选择线SS-(Slave select,或CS-)
SS-线用于选择激活某Slave设备,低有效,由Master驱动输出。只有当SS-信号线为低电平时,对应Slave设备的SPI接口才处于工作状态。 SCLK:同步时钟信号线, SCLK用来同步主从设备的数据传输,由Master驱动输出,Slave设备按SCK的步调接收或发送数据。 串行数据线: SPI接口数据线是单向的,共有两根数据线,分别承担Master到Slave、Slave到Master的数据传输;但是不同厂家的数据线命名有差别。 Motorola的经典命名是MOSI和MISO,这是站在信号线的角度来命名的。 MOSI:When master, out line; when slave, in line MISO:When master, in line; when slave, out line 比如MOSI,该线上数据一定是Master流向Slave的。因此在电路板上,Master的MOSI引脚应与Slave的MOSI引脚连接在一起。双方的MISO也应该连在一起,而不是一方的MOSI连接另一方的MISO。 不过,也有一些产家(比如Microchip)是按照类似SDI,SDO的方式来命名,这是站在器件的角度根据数据流向来定义的。 SDI:串行数据输入 SDO:串行数据输出 这种情况下,当Master与Slave连接时,就应该用一方的SDO连接另一个方的SDI。 由于SPI接口数据线是单向的,故电路设计时,数据线连接一定要正确,必然是一方的输出连接另一方的输入。 其实这个问题本来很简单的,但由于不同厂家产品的命名习惯可能不同,因此还需小心,以免低级出错。 数据传输的时序模式
AT89C52单片机驱动SD卡系统设计 本文详细阐述了用AT89C52单片机对SD卡进行操作的过程,提出了一种不带SD卡控制器,MCU读写SD卡的方法,实现了SD卡在电能监测及无功补偿数据采集系统中的用途。 长期以来,以Flash Memory为存储体的SD卡因具备体积小、功耗低、可擦写以及非易失性等特点而被广泛应用于消费类电子产品中。特别是近年来,随着价格不断下降且存储容量不断提高,它的应用范围日益增广。当数据采集系统需要长时间地采集、记录海量数据时,选择SD卡作为存储媒质是开发者们一个很好的选择。在电能监测以及无功补偿系统中,要连续记录大量的电压、电流、有功功率、无功功率以及时间等参数,当单片机采集到这些数据时可以利用SD作为存储媒质。本文主要介绍了SD卡在电能监测及无功补偿数据采集系统中的应用方案 设计方案 应用AT89C52读写SD卡有两点需要注意。首先,需要寻找一个实现AT89C52单片机与SD卡通讯的解决方案;其次,SD卡所能接受的逻辑电平与AT89C52提供的逻辑电平不匹配,需要解决电平匹配问题 通讯模式 SD卡有两个可选的通讯协议:SD模式和SPI模式。SD模式是SD卡标准的读写方式,但是在选用SD模式时,往往需要选择带有SD卡控制器接口的MCU,或者必须加入额外的SD卡控制单元以支持SD卡的读写。然而,AT89C52单片机没有集成SD卡控制器接口,若选用SD模式通讯就无形中增加了产品的硬件成本。在SD卡数据读写时间要求不是很严格的情况下,选用SPI模式可以说是一种最佳的解决方案。因为在SPI模式下,通过四条线就可以完成所有的数据交换,并且目前市场上很多MCU都集成有现成的SPI接口电路,采用SPI模式对SD卡进行读写操作可大大简化硬件电路的设计。 虽然AT89C52不带SD卡硬件控制器,也没有现成的SPI接口模块,但是可以用软件模拟出SPI总线时序。本文用SPI总线模式读写SD卡。 电平匹配 SD卡的逻辑电平相当于3.3V TTL电平标准,而控制芯片AT89C52的逻辑电平为5V CMOS电平标准。因此,它们之间不能直接相连,否则会有烧毁SD卡的可能。出于对安全工作的考虑,有必要解决电平匹配问题。 要解决这一问题,最根本的就是解决逻辑器件接口的电平兼容问题,原则主要有两条:一为输出电平器件输出高电平的最小电压值,应该大于接收电平器件识别为高电平的最低电压值;另一条为输出电平器件输出低电平的最大电压值,应该小于接收电平器件识别为低电平的最高电压值。 一般来说,通用的电平转换方案是采用类似SN74ALVC4245的专用电平转换芯片,这类芯片不仅可以用作升压和降压,而且允许两边电源不同步。但是,这个方案代价相对昂贵,而且一般的专用电平转换芯片都是同时转换8路、16路或者更多路数的电平,相对本系统仅仅需要转换3路来说是一种资源的浪费。 考虑到SD卡在SPI协议的工作模式下,通讯都是单向的,于是在单片机向
SPI 接口的设计 第二章介绍了模数转换器的可编程控制架构,其中可编程控制功能的实现需要分成两部分:一部分为SPI 接口电路,以及其根据部寄存器存储的数据产生的控制信号;另一部分是具体的电路受控模块。本章将介绍接口与数字逻辑电路的设计,包括应用于本模数转换器的SPI 接口与数字逻辑电路的设计、综合以及仿真验证。 3.1 数据通信接口 3.1.1 串行通信 基本的通信方式有两种:并行通信和串行通信。并行通信是指数据以成组的方式,在多条并行信道上同时进行传输。 串行通信指要传送的数据或信息按一定的格式编码,然后在单根线上,按位的先后顺序进行传送。接收数据时,每次从单根线上按位接收信息,再把它们拼成一个字符,送给CPU (Central Processing Unit )做进一步的处理。收发双方必须保持字符同步,以使接收方能从接收的数据比特流中正确区分出与发送方相同的一个一个字符。串行通信只需要一条传输信道,易于实现,是目前主要采用的一种通信方式,它具有通信线少以及传送距离远等优点。 串行通信时,按数据的传送的方向可以分为单工、半双工和全双工等三种方式。 (1)单工(Simplex ):数据线仅能向一个方向传输数据,两个设备进行通信时,一边只能发送数据,另一边只能接收数据。 (2)半双工(Half Duplex ):数据可在两个设备间向任一个方向传输,但因为只有一根传输线,故同一时间只能向一个方向传输数据,不能同时收发。 (3)全双工(Full Duplex ):对数据的两个传输方向采用不同的通路,可以同时发送和接收数据, 串行通信有两种基本工作方式:异步方式和同步方式。采用异步方式(Asynchronous )时,数据发送的格式如图3-1所示。不发送数据时,数据信号线呈现高电平,处于空闲状态。当有数据要发送时,数据信号线变成低电平,并持续一位的时间,用于表示字符的开始,称为起始位。起始位之后,在信号线上依次出现待发送的每一位字符数据,最低有效位0D 最先出现。采用不同的编码方案,待发送的每个字符的位数就不同。当字符用ASCII 码表示时,数据位占7位(60~D D )。在数据位的后面有一个奇偶校验位,其后有停止位,用于指示字符的结束。停止位可以是一位也可以是一位半或两位。可见,用异步方式发送一个7位的ASCII 码字符时,实际需发送10位、10.5位或11位信息。如
SPI总线在单片机系统中的实现 2007-04-28 10:56 来源:mcuzb //-----------------------函数声明,变量定义------------------------------------------#include
Linux下的SPI总线驱动(一)2013-04-12 15:08:46 分类:LINUX 版权所有,转载请说明转自一.SPI理论介绍 SPI总线全名,串行外围设备接口,是一种串行的主从接口,集成于很多微控制器内部。和I2C使用2根线相比,SPI总线使用4根线:MOSI (SPI 总线主机输出/ 从机输入)、MISO (SPI总线主机输入/从机输出)、SCLK(时钟信号,由主设备产生)、CS(从设备使能信号,由主设备控制)。由于SPI总线有专用的数据线用于数据的发送和接收,因此可以工作于全双工,当前市面上可以找到的SPI外围设备包括RF芯片、智能卡接口、E2PROM、RTC、触摸屏传感器、ADC。 SCLK信号线只由主设备控制,从设备不能控制信号线。同样,在一个基于SPI的设备中,至少有一个主控设备。这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCLK 时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。也就是说,主设备通过对SCLK时钟线的控制可以完成对通讯的控制。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。不同的SPI 设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C 系统要稍微复杂一些。 二.SPI驱动移植 我们下面将的驱动的移植是针对Mini2440的SPI驱动的移植 Step1:在Linux Source Code中修改arch/arm/mach-s3c2440/文件,加入头文件:#include
SPI 串行通信接口是一种常用的标准接口,由于其使用 简单方便且节省系统资源,很多芯片都支持该接口,应用相当广泛[1]。但是现有文献和设计多数仅实现了SPI 接口的基本发送和接收功能,对SPI 接口的时序控制没有进行深入的研究。全功能SPI 接口应具有四种不同的时钟模式,以适应具有不同时序要求的从控制器。文中主要研究SPI 接口的时钟时序,并用具体电路实现具有4种不同极性和相位的时钟,最后通过仿真验证和FPGA 验证[2]。 1SPI 控制器典型结构 SPI 模块中的典型结构是用于通信的主从2个控制器之 间的连接,如图1所示。由串行时钟线(SPICLK )、主机输入从机输出线(SPISOMI )、主机输出从机输入线(SPISIMO )、SPI 选通线(SPISTE )4条线组成[3]。当CPU 通过译码向主控制器写入要传输的数据时,主控制器通过串行时钟线来启动数据传输,将会在串行时钟线的一个边沿将数据移出移位寄存器,而在串行时钟的另一个边沿将数据锁存在移位寄存器中。 SPI 选通线是SPI 控制器的使能端,可以选择多个从机,实现 一主多从的结构,只要SPI 选通信号将要选的从机处的选通信号变为低电平就能够连接成功。 2 全功能SPI 控制器设计 2.1 SPI 控制器内部结构 SPI 控制器的原理框图如图2所示,其中主要包括:1)SPI 控制器的内部寄存器 SPI 操作控制寄存器(SPICTL ),SPI 状态寄存器(SPISTS ), SPI 波特率设计寄存器(SPIBRR ),SPI 接收缓冲寄存器 图1 SPI 主从连接Fig.1 Master -slave link 全功能SPI 接口的设计与实现 辛晓宁,孙文强 (沈阳工业大学研究生学院,辽宁沈阳110870) 摘要:SPI (Serial Peripheral Interface ,串行外围接口)是Motorola 公司提出的外围接口协议,它采用一个串行、同步、全双工的通信方式,解决了微处理器和外设之间的串行通信问题,并且可以和多个外设直接通信,具有配置灵活,结构简单等优点。根据全功能SPI 总线的特点,设计的SPI 接口可以最大发送和接收16位数据;在主模式和从模式下SPI 模块的时钟频率最大可以达到系统时钟的1/4,并且在主模式下可以提供具有四种不同相位和极性的时钟供从模块选择;可以同时进行发送和接收操作,拥有中断标志位和溢出中断标志位。关键词:全功能SPI ;时钟极性和相位;串行通信;微处理器;中断控制中图分类号:TP332.3 文献标识码:A 文章编号:1674-6236(2012)23-0153-04 Design and implementation of full featured SPI master interface XIN Xiao -ning ,SUN Wen -qiang (Graduate School ,Shenyang University of Technology ,Shenyang 110870,China ) Abstract:The SPI put forward by Motorola Company is a full-duplex ,synchronous serial date link that is standard across many microprocessors ,microcontrollers ,and peripherals It enables communication between microprocessors and peripherals and inter -processor communication ,The SPI system is flexible enough to interface directly with numerous commercially available peripherals ,and it also has some excellences such as it can be configured flexibly and it has a simply structure ,and so on.This SPI has 16-bit transmit and receive capability.The maximum transmission rate in both slave mode and master mode is now CLKOUT/4.The SPI can provide four different clocking schemes on the SPICLK pin.It can be sending and receiving at same time.It has SPI interrupt flag and TXBUF full flag. Key words:full function of SPI ;polarity and phase of CLK ;serial communication microprocessor ;interrupt control 收稿日期:2012-08-11 稿件编号:201208039 作者简介:辛晓宁(1965—),男,辽宁沈阳人,博士,教授。研究方向:SOC 集成电路设计。 电子设计工程 Electronic Design Engineering 第20卷Vol.20第23期No.23 2012年12月Dec.2012 -153-
基于FPGA的SPI接口设计 SPI是一种在FPGA和其他芯片之间传输数据的简单有效的接口方式。 SPI项目 第一部分:什么是SPI 第二部分:SPI的简单实现 第三部分:应用 第一部分:什么是SPI SPI是允许一个器件同其他一个或多个器件进行通讯的简单接口。 SPI是什么样的? 首先让我们来看看两个芯片之间的SPI接口是如何连接的。 在两个芯片时间通讯时,SPI需要4条连线。 正如你所看到的,他们是SCK、MISO、MOSI以及SSEL。其中一个芯片叫做主控芯片,另一个叫从芯片。 SPI基础 基本特点: 1.同步 2.串行 3.全双工 4.非即插即用 5.一主多从 更多细节: 1.同步时钟有主控芯片产生,每个时钟传输一位数据 2.数据在传输前,首先许要进行并转串,才能用一条线传输 3.两条数据线,一条输入、一条输出 4.主从双方有关于SPI传输的先验知识,如比特顺序、数据长度等 5.数据传输有主控芯片发起,每次只与一个从芯片通讯 SPI是一种同步全双工的通讯接口,每个时钟在两条数据线上各传输一比特数据。 简单的传输 假设在主从芯片之间进行的是8位长度的,高位数据在前的SPI传输,则单个字节的传输在波形上看起来是这样的。 MOSI是主输出线,而MISO则是从输出线。由于SPI是全双工的,所以在时钟沿上两条线同时传输数据。MOSI将数据从主控芯片传输至从芯片,MISO则将从芯片的数据传输到主控芯片。 详细的说是这样的: 1,首先主控芯片使能相应的SSEL信号,通知相应的从芯片数据传输要开始了; 2,主控芯片产生8个SPI时钟周期,并将数据在每个时钟沿发送出去,同时从芯片在也每个时钟沿将数据发送到MISO线上。 3,主控芯片撤销SSEL信号,一次SPI传输结束 多个从芯片的情况
文档编号: SPI驱动使用介绍 文档状态:[ ] 草稿[√] 正式发布[ ] 正在修改 版本0.01 校对版本日期2013-12-18 审核编制孙忠刚批准
版本变更记录 版本日期修改人变更理由/变更内容 孙忠刚初始版本 0.01 2013-12-18
1. SPI驱动提供的通讯方式 Spi提供两种通讯方式,对应的驱动接口分别为SyncTransmit和AsynTransmit。 a)同步通讯方式 当驱动接口Spi_SyncTransmit执行完毕,即完成SPI通讯。当SPI总线传输数据时,CPU处于轮询等待状态,直至SPI通讯结束CPU方继续向下执行。 b)异步通讯方式 当驱动接口Spi_AsynTransmit执行完毕,但SPI通讯不一定完成。CPU将待发送的数据写入SPI数据发送缓冲区,触发SPI通讯,CPU继续向下执行,而不等待 SPI通讯结束。 2. SPI驱动使用方法 a)基础知识介绍 在AutoSar标准中,与SPI通讯相关的三个术语:Channel、Job和Sequence。 1个Channel对应1个发送缓冲区和1接收缓冲区; 1个Job对应着1次SPI通讯发送的内容(既SPI 一次片选过程所传输的内容)。 1个Sequence 对应着1个SPI通讯序列(job序列)。多个Job可以分配给一个Sequence。 关于每个术语的详细解释,参考AutoSar标准。 SPI通讯是基于Sequence触发的,即使发送1个Job也要将该Job分配给1个队列,然后通过触发Sequence来实现Job的传输。 b)两种使用方法 方法1:对应1个SPI外设芯片,分配1个Job、1个Sequence。使用此种方法,触发一次Sequence,只能传输一个Job,当对外设发送多个Job时,需要多次触发Sequence,且在下一次触发Sequence时,必须确保上一次Sequence已经传输完毕,否则下一次Sequence传输会因为上一次Sequence传输占用SPI总线而失败。 方法2:对应1个SPI外设芯片,结合对外设芯片的控制方法,分配多个Job和多个Sequence,有目的分配Job到相应的Sequence中。在不同控制逻辑中,触发不同的Sequence,传输不同个数的Job序列。当对1个Sequence分配多Job时,触发此Sequence就可以完成多个Job的传输,SPI 驱动本身来保证Job序列的传输,不会产生下一个Job传输因为上一个Job占用SPI总线而失败的情况。
串行显示驱动器PS7219及单片机的SPI接口设计 在单片机的应用系统中,为了便于人们观察和监视单片机的运行情况,常常需要用显示器显示运行的中间结果及状态等等。因此显示器往往是单片机系统必不可少的外部设备之一。常用的显示器有很多种,其中LED(发光二极管显示器)是应用较多的一种,它特别适用于强光和光线极弱的场合。 要使LED显示,必须提供段选码和位选码。传统的硬件译码显示接口广泛采用由中央处理器CPU(如:Intel 8031)扩展I/O口(如:8255),然后再使用逻辑门驱动芯片(如7407等)驱动相应的位码和段码。这种设计,芯片间连线十分复杂,系统工作可靠性不高,已越来越不适应单片机系统集成化、小型化的发展要求。特别是系统并行扩展I/O,其缺点十分明显 (1)连线太多,系统连线复杂,印制板布线不方便; (2)并行总线上挂靠的器件太多,系统工作的稳定性和可靠性低; (3)体积较大,集成度不高。 正是由于上述原因,近年来,各厂家相继开发出了集成度较高、驱动能力较强、驱动位数较多、功能齐全的LED显示驱动器。 本文介绍一种低价位、高性能的多位LED显示驱动器PS7219芯片,以及它与单片机89C51具体的SPI接口设计与应用软件。 1PS7219简介 PS7219是一种新型的串行接口的8位数字静态显示芯片。它是由武汉力源公司新推出的24脚双列直插式芯片,采用流行的同步串行外设接口(SPI),可与任何一种单片机方便接口,并可同时驱动8位LED (或64只独立LED),其引脚图如图1所示。 PS7219内部具有15×8RAM功能控制寄存器,可方便选址,对每位数字可单独控制、刷新、不需重写整个显示器。显示数字亮度可由数字进行控制,每位具有闪烁使能控制位。当引脚CON(13脚)置高电平,可禁止所有显示,达到降低功耗的效果,但同时并不影响对控制寄存器的修改。PS7219还有一个掉电模式、一个允许用户从1位数显示到8位数显示选择的扫描界限寄存器和一个强迫所有LED接通的测试模式。另外,PS7219A型内置一个可靠的uP监控电路,可为外部提供一个脉宽140ms,触发门限典型值为4.63V的高电平复位信号。 如果N个PS7219级联,可实现N×8位LED显示。 2PS7219引脚功能 PS7219引脚功能如表1所示。
一、SPI接口简介 SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。SPI有三个寄存器分别为:控制寄存器SPCR,状态寄存器SPSR,数据寄存器SPDR。外围设备FLASHRAM、网络控制器、LCD显示驱动器、A/D 转换器(如图一所示)和MCU等。 图一、ADC中的SPI 二、SPI接口 一个典型的SPI模块的核心部件是一个8位的移位寄存器和一个8位的数据寄存器SPIDR。通过SPI进行数据传送的设备有主SPI和从SPI之分,即SPI传送在一个主SPI和一个从SPI之间进行。图二给出了两个SPI模块相互连接、进行SPI传送的示意图,图左边是一个主SPI,图右边为一个从SPI。
图二、典型SPI示意图 在AN-877应用笔记中,对spi的接口定义与典型spi接口有所不同,AN-877使用一根线SDIO代替了典型SPI的MISO和MOSI,SS接口用CSB代替。图三和图四分别是双线模式下单器件控制(主从一对一)和双线模式下多器件控制(主从一对多)。 图三:主从一对一控制 图四:主从一对多控制
但是原理都一样。主从机之间一般由3个引脚组成:串行时钟引脚(SCLK)、串行数据输入/输出引脚(SDIO)、片选引脚(CSB)。 1、引脚 数据输入/输出(SDIO):该引脚用作数据的输入/输出,用作输入还是用作输出具体取决于所发送的指令(读或写)以及时序帧中的相对位置(指令周期或数据周期)。在读或写的第一个阶段,该引脚用作输入,将信息传递到内部状态机。如果该命令为读命令,状态机把该引脚(SDIO)变为输出,然后该引脚将数据回传给外部控制器。如果该命令为写命令,该引脚始终用作输入。 串行时钟(SCLK):SCLK由外部控制器提供,时钟频率最高为25MHZ。所有数据的输入输出都是与SCLK同步的。输入数据在SCLK的上升沿有效,输出数据在SCLK的下降沿有效。
串行接口SPI接口应用设计 2011-12-28 13:24:32| 分类:单片机| 标签:|字号大中小订阅 作者:马潮老师/ 整理:armok / 2005-01-17/ https://www.doczj.com/doc/4b18573986.html, 作者:马潮老师/ 整理:armok / 2005-01-17/ https://www.doczj.com/doc/4b18573986.html, 使用的同步串行三线SPI接口,可以方便的连接采用SPI通信协议的外围或另一片AVR单片机,实现在短距离内的高速同步通信。ATmega128的SPI采用硬件方式实现面向字节的全双工3线同步通信,支持主机、从机和2种不同极性的SPI时序,通信速率有7种选择,主机方式的最高速率为1/2系统时钟,从机方式最高速率为1/4系统时钟。 ATmega128单片机内部的SPI接口也被用于程序存储器和数据E2PROM的编程下载和上传。但特别需要注意的是,此时SPI的MOSI和MISO接口不再对应PB2、PB3引脚,而是转换到PE0、PE1引脚上(PDI、PDO),其详见第二章中关于程序存储器的串行编程和校验部分的内容。 ATmega128的SPI为硬件接口和传输完成中断申请,所以使用SPI传输数据的有效方法是采用中断方式+数据缓存器的设计方法。在对SPI初始化时,应注意以下几点: .正确选择和设置主机或从机,以及工作模式(极性),数据传输率; .注意传送字节的顺序,是低位优先(LSB First)还是高位优先(MSB Frist); .正确设置MOSI和MISO接口的输入输出方向,输入引脚使用上拉电阻,可以节省总线上的吊高电阻。 下面一段是SPI主机方式连续发送(接收)字节的例程: #define SIZE 100 unsigned char SPI_rx_buff[SIZE]; unsigned char SPI_tx_buff[SIZE]; unsigned char rx_wr_index,rx_rd_index,rx_counter,rx_buffer_overflow; unsigned char tx_wr_index,tx_rd_index,tx_counter; #pragma interrupt_handler spi_stc_isr:18 void spi_stc_isr(void) { SPI_rx_buff[rx_wr_index] = SPDR; //从ISP口读出收到的字节 if (++rx_wr_index == SIZE) rx_wr_index = 0; //放入接收缓冲区,并调整队列指针 if (++rx_counter == SIZE) { rx_counter = 0; rx_buffer_overflow = 1; } if (tx_counter) //如果发送缓冲区中有待发的数据 { --tx_counter;