1、概念:
分支定界算法(Branch and bound,简称为BB、B&B, or BnB)始终围绕着一颗搜索树进行的,我们将原问题看作搜索树的根节点,从这里出发,分支的含义就是将大的问题分割成小的问题。大问题可以看成是搜索树的父节点,那么从大问题分割出来的小问题就是父节点的子节点了。分支的过程就是不断给树增加子节点的过程。而定界就是在分支的过程中检查子问题的上下界,如果子问题不能产生一比当前最优解还要优的解,那么砍掉这一支。直到所有子问题都不能产生一个更优的解时,算法结束。
2、例子:
用BB算法求解下面的整数规划模型
因为求解的是最大化问题,我们不妨设当前的最优解BestV为-INF,表示负无穷。
1.
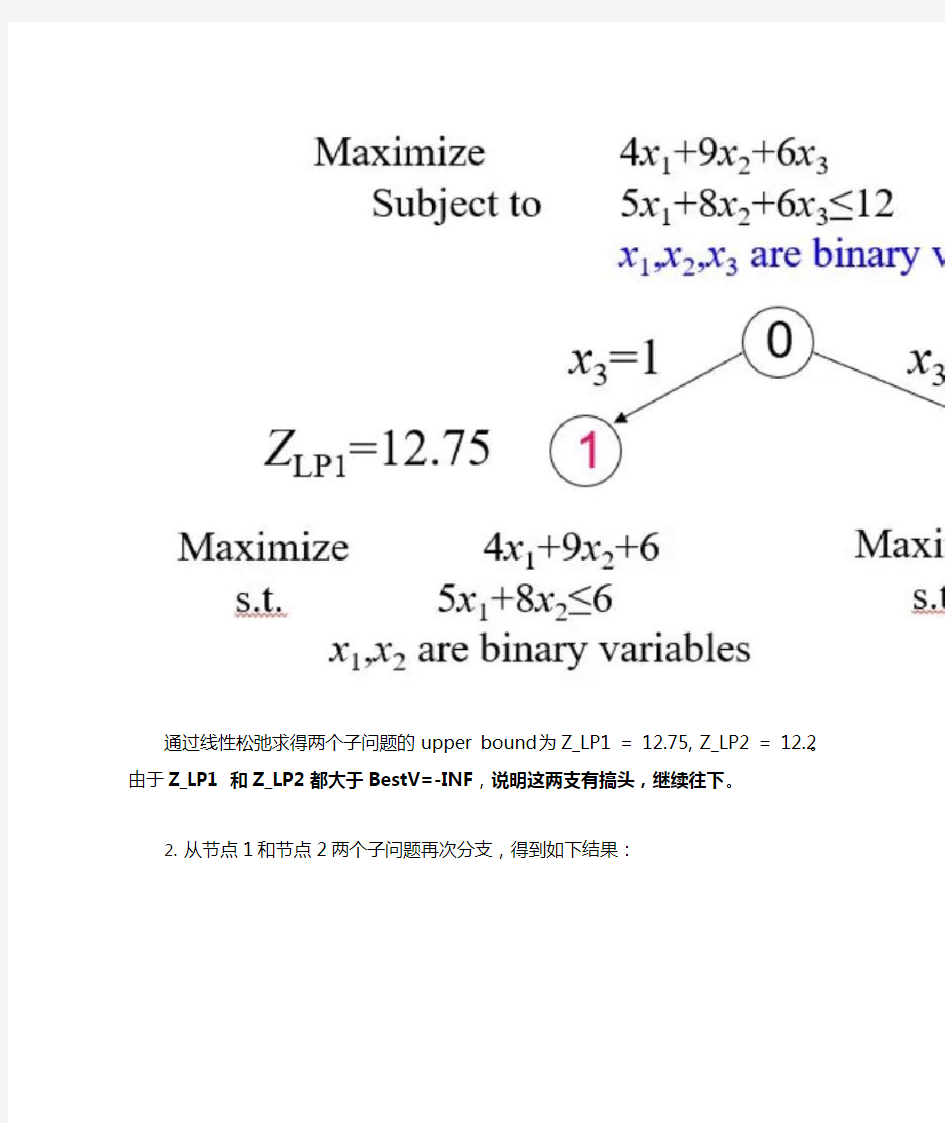
首先从主问题分出两支子问题:
通过线性松弛求得两个子问题的upper bound为Z_LP1 = 12.75,Z_LP2 = 12.2。由于Z_LP1 和Z_LP2都大于BestV=-INF,说明这两支有搞头,继续往下。
2.
3.
从节点1和节点2两个子问题再次分支,得到如下结果:
子问题3已经不可行,无需再理。子问题4通过线性松弛得到最优解为10,刚好也符合原问题0的所有约束,在该支找到一个可行解,更新BestV = 10。
子问题5通过线性松弛得到upper bound为11.87>当前的BestV = 10,因此子问题5还有戏,待下一次分支。而子问题6得到upper bound为9<当前的BestV = 10,那么从该支下去找到的解也不会变得更好,所以剪掉!
4.
对节点5进行分支,得到:
子问题7不可行,无需再理。子问题8得到一个满足原问题0所有约束的解,但是目标值为4<当前的BestV=10,所以不更新BestV,同时该支下去也不能得到更好的解了。
6.
此时,所有的分支遍历都完成,我们最终找到了最优解。
3、算法过程(以最小化问题minimize f(x)为例)
1、使用启发式,找到优化问题的解决方案xh。存储其值,B = f(x_h)。(如果没有启发式可用,则将B设置为无穷大。)B将表示到目前为止找到的最佳解,并将用作候选解的上界。
2、初始化队列以保存部分解决方案,但不分配任何问题变量。
3、循环直到队列为空:
3.1从队列中取出一个节点N.
3.2如果N代表单个候选解x和f(x) 3.3否则,在N上分支以产生新的节点Ni。对于每个新节点: 3.3.1如果下线(N_i)> B,则什么都不做; 由于此节点的下限大于问题的上限,因此它永远不会导致最优解,并且可以被丢弃。 3.3.2否则,将Ni存入队列。 8. 其实代码该过程描述也很明了了。第1步可以用启发式找一个当前最优解B出来,如果不想也可以将B设置为正无穷。对于一个最小化问 题而言,肯定是子问题的lower bound不能超过当前最优解,不然超过了,该子问题就需要剪掉了。 第2第3步主要是用队列取构建一个搜索树进行搜索,具体的搜索方式由queue这个数据结构决定的。 注:B&B是围绕着一颗搜索树进行的,那么对于一棵树而言就有很多种搜索方式 1)Breadth-first search (BFS):广度优先搜索,就是横向搜索,先搜索同层的节点。再一层一层往下。这种搜索可以用FIFO queue实现。 2)Depth-first search (DFS):深度优先搜索,就是纵向搜索,先一个分支走到底,再跳到另一个分支走到底。这种搜索可以用LIFO queue也就是栈实现。 3)Best-First Search:最佳优先搜索,最佳优先搜索算法是一种启发式搜索算法(Heuristic Algorithm),其基于广度优先搜索算法,不同点是其依赖于估价函数对将要遍历的节点进行估价,选择代价小的节点进行遍历,直到找到目标点为止。这种搜索可以用优先队列priority queue来实现。
相关主题
文本预览