
(5)调查、搜集有关资料。系统动力学模型被认为是真实系统的“实验室”,要想通过模型模拟和剖析真实系统,获取更丰富、更深刻的信息,进而寻求解决问题的途径,“实验室”的建立是至关重要的。而要建好“实验室”,就必须在认真调查研究的基础上,花大力气搜集、完备各种资料。毫无疑问,为使模型更真实地反映系统,收集的资料应越多越好。但是,要强调的是,资料搜集工作必须紧紧围绕着研究目的进行,如果偏离了研究目的,即使资料再多也是徒劳的,而且还会给资料的筛选带来许多困难。
3-2-2-2构建模型
模型的构建,是系统动力学研究、解决问题的关键性的一个步骤。系统动力学模型的建造,一般包括如下两个相互联系的工作环节。
(1)分析系统结构。在需要研究的问题已经明确、系统中的重要变量与参考模式已经确定、资料搜集工作也已基本完成之后,就要研究系统及其组成部分之间的相互关系、系统中的主要变量与其它有关变量之间的关系、分析系统的结构。为了使建模工作一开始就能把握整个研究过程的方向,建模者首先要分析系统整体与局部的关系,然后分析变量与变量之间的关系,最后把这些关系转化成反映系统结构的因果关系图或流图。
因果关系图,是反映变量与变量之间因果关系的示意图。其中,变量之间相互影响作用的性质用因果关系键来表示。因果关系键中的正、负极性分别表示了正、负两种不同的影响作用。因果关系键把若干个变最串联后又折回源发变量,这样便形成了一个反馈回路。对于反馈回路,也有正、负极性之区别。如果沿着某一反馈回路绕行一周后,各因果关系键的累计效应为正,则该回路为正反馈回路,反之则为负反馈回路。正反馈具有自我强化的作用机制,负反馈则具有自我抑制的作用机制。
因果关系图虽然能够描述系统反馈结构的基本方面,但不能反映不同性质变量的区别。譬如,状态变量是系统动力学中最重要的变量,它具有积累效应。正是由于状态变量的积累效应,才使系统动力学模型的计算机模拟成为可能。为了进一步揭示系统变量的区别,分别用不同的符号代表不同的变量,并把有关的代表不同变量的各类符号用带箭头的线联结起来,便形成了反映系统结构的流图。
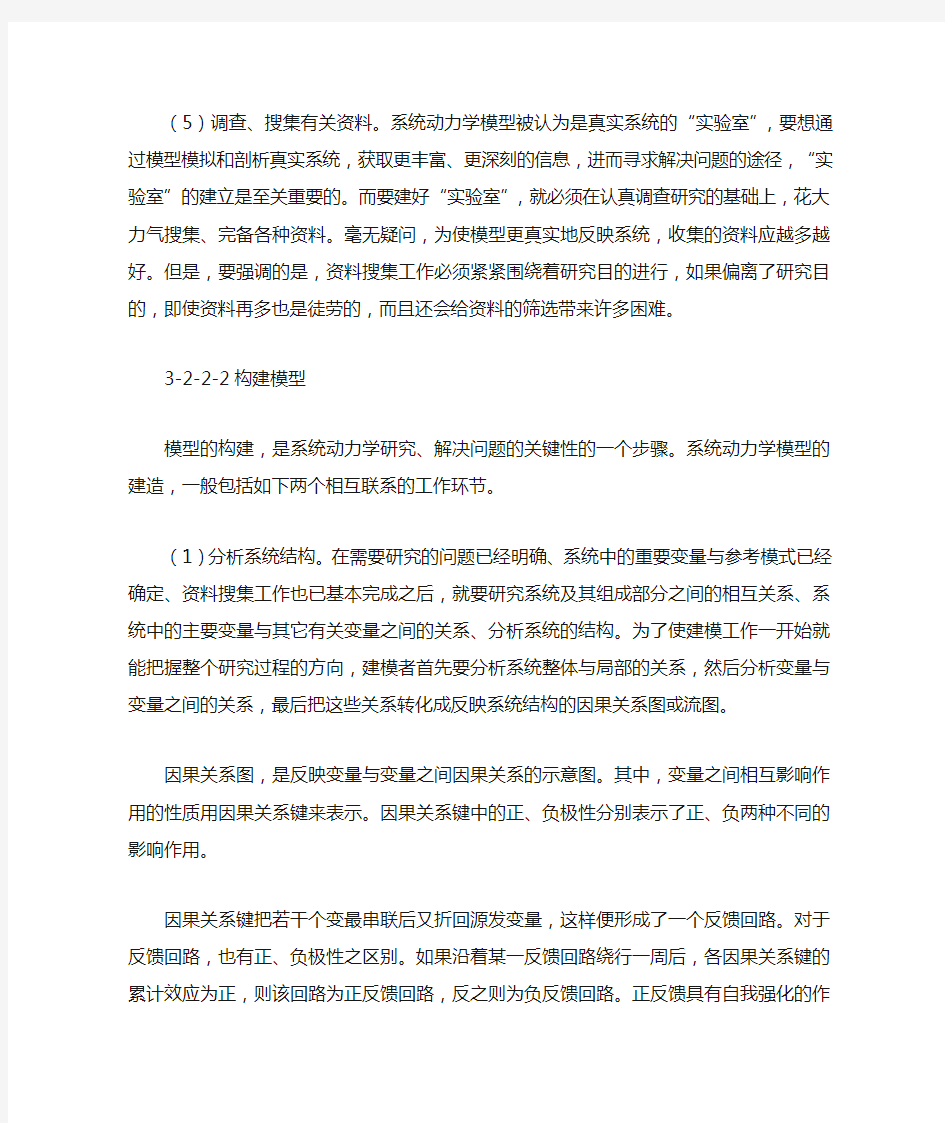
系统动力学认为,系统中包含连续的、类似流体流动与积累的过程。我们可以将这个过程用流图来表示。例如,图3.2是一个表示系统中兔子数量变化的流图。流图中的未成年兔和成年兔是状态变量,表示其是一个积累变量;兔出生率、成熟率和兔死亡率均为速率变量,随着时间的推移,它们使相应的状态变量的值增或减;图中云状的符号表示源与漏,两者都是抽象的概念,代表输入与输出状态的一切物质,在这里,它们表示此模型不考虑小兔的来源与老兔的去向,把它们都放到界限之外。
18
对于复杂的流图,回路中还存在其他变量,这些变量能够帮我们建立状态变量、速率变量等变量之间的联系,我们称其为辅助变量。
(2)建立DYNAMO方程。在DYNAMO模型中,主要有六种方程,其标志符号分别为:L状态变量方程;
R速率方程;
A辅助方程;
C赋值于常数;
T赋值于表函数中Y坐标;
N计算初始值。
在这些方程中,C,T与N方程都是为模型提供参数值的,并且这些值在同一次模拟中保持不变。L方程是积累方程,R与A方程是代数运算方程。我们来重点介绍一下L,R与A方程。
①L状态变量方程。在DYNAMO模型中,计算状态变量的方程称为状态方程,该方程的基本形式为:
LEVEL(现在)=LEVEL(过去)+DT(输入速率-输出速率)
②R速率方程。在状态变量方程中,代表输入(INFLOW)与输出(OUTFLOW)的变量称为速率变量,计算速率变量的代数方程称为速率方程。
③A辅助变量方程。在DYNAMO模型中,附加的代数运算方程称为辅助方程。“辅助”的含义就是帮助建立速率方程。一般而言,辅助方程没有统一的标准格式,但是其下标总是K。辅助变量的值可由现在时刻的其它变量,如状态变量、变化率、其它辅助变量和常量求得。(3)参数的确定与赋值。DYNAMO模型中的参数,主要有表函数、初始值、常数、转换系数、调节时间与参考数值等。在运用DYNAMO模型对真实系统进行模拟之前,首先应对以上参数赋值。
3-2-2-3模型的有效性检验与模拟
当系统动力学模型建构完成以后,经过反复检查各个方程,发现准确无误后,便可将其输入计算机进行调试运行。当模型调试运行通过后,研究者有必要根据历史数据检验模型的真实性和有效性。只有通过有效性检验的模型才是可靠的、能够被我们利用的模型。如果模型有效性差,我们则要重新分析调整模型结构和影响参数直到其有效。之后,研究者可以根据研究的目的,设计不同的方案,运用模型进行模拟运算,对真实系统进行仿真。通过调整参数的输入值,寻找解决问题的决策。
上述主要过程与步骤可以用图3.3来表示。
3-2-3系统动力学仿真语言Vensim简介
系统动力学在对模型进行模拟的过程中,有其专用的仿真语言。1985年在美国,用于IBM 个人计算机的专用DYNAMO系列问世。80年代中后期,用于微型机的高级系统动力学仿真语言STEUA、Vensim、ithink和Powersim逐渐兴起,它们具有图示辅助建模、辅助思考的功能。随后,它们的功能不断改进,90年代后,它们都能在Windows下工作。其中,Vensim 是被普遍认为功能最优、应用广泛的系统动力学仿真软件。
Vensim是一个基于视窗界面的系统动力学建模工具,提供了功能强大的图形编辑环境。在构建完成包含水平变量、辅助变量、常量、箭头等要素在内的因果反馈环之后,通过使用Vensim提供的便捷易用的公式编辑器,生成完整的模拟模型。在通过系统后台的检验调试后,还可以充分利用一系列分析工具对所模拟系统的行为机制进行深入的分析研究。Vensim 所提供的分析工具中,可以将所有工作变量之间的因果关系用树状的图形形式表示出来,或将模型中所有反馈环以列表的形式列示出来,也可以将各变量在整个模拟周期内的数值以图形的形式表示出来。总结起来,Vensim软件的主要特点如下:
(1)利用图示化编程进行建模。在V ensim中,“编程”实际上并不存在,只有建模的概念。在启动Vensim系统后得到的主窗口中,依据操作按钮画出简化流率基本树图或流图,再通过EquationEditor输入方程和参数,就可以直接模拟使用。在V ensim中方程及变量不带时标,模型建立是围绕着变量间的因果关系展开的。
(2)运行于Windows操作系统下,采用了多种分析方法,使得Vensim的输出信息非常丰
富。输出兼容性强,一般的模拟结果,除了即时显示外,还提供了保存到文件和复制至剪贴板等方法输出。
(3)对模型提供多种分析方法。Vensim可以对模型进行结构分析和数据集分析。其中结构分析包括原因树分析(逐层列举作用于指定变量的变量)、结果树分析(逐层列举该变量对于其他变量的作用)和反馈环列表分析。数据集分析包括变量随时间变化的数据值及曲线图分析。
(4)真实性检查。对于所研究的系统和模型中的一些重要变量,可以依据常识和一些基本原则,预先提出对其正确性的基本要求。设定假设是受真实性约束的,将这些假设加到建好的模型中,专门模拟现有模型在运行时对于这些约束的遵守情况或违反情况,判断模型的合理性与真实性,从而调整结构或参数。
§3-3应用系统动力学研究第三方物流成本的可行性分析
虽然系统动力学是从运筹学的基础上改进发展起来的,但与运筹学不同,系统动力学在传统管理程序的背景下,引进信息反馈和系统力学理论,把问题流体化,从而获得描述系统构造的一般方法,并且通过电子计算机强大的记忆能力和高速运算能力而获得对真实系统的跟踪,描述系统的未来行为,而不是仅仅局限于寻求“最优解”。随着系统动力学应用范围的扩大,近些年来,出现了诸如物流系统动力学这样的边缘学科。将系统动力学应用于第三方物流系统的成本问题领域,是系统动力学学科特点和第三方物流活动的系统性特征共同决定的。
(1)第三方物流系统具有多个动态子系统。第三方物流系统由运输、储存、包装、装卸、流通加工和物流信息处理等子系统有机组成[7]。在这些子系统中,大量存在随时间序列而变化的状态,例如,物资的库存量、运输量、搬运量、进货速率、销售速率、装卸速率等,都可以是随时间而变化的,涉及到相应的物流活动的成本也随时间发生动态性变化。而系统动力学建立的是结构——功能模拟模型,它最适用于研究复杂系统的结构、功能和行为之间动态的关系。
(2)第三方物流系统是一个因果反馈系统。第三方物流系统中随时间而变化的状态变量都是由某种原因而引起的,改变这些因素可以导致某些状态变量的变化,物流成本问题也是如此。也就是说,第三方物流系统中影响各物流活动的成本因素之间可以形成各种因果反馈关系,适合于用系统动力学方法来分析处理这些问题。
(3)第三方物流系统是一个非线性系统,系统各变量之间存在时滞。系统动力学的研究对象主要是非线性的复杂大系统。拿库存系统来说,库存量的多少和销售量、在制品、产成品等之间表现出明显的非线性关系。这些非线性因素极大地限制了一般数学方法对其的研究。而且各变量之间的时间滞后通常以周、月甚至年来计算,因此,物流成本的发生也存在时滞。(4)系统动力学在数据缺乏的条件下仍可进行研究。第三方物流系统的复杂性导致了某些参数关系难以量化或数据不足,但是由于系统动力学模型的结构是以反馈环为基础的,多重反馈环的存在使得系统行为模式对大多数参数是不敏感的。因此,虽然数据缺乏,但是只要估计的参数在其宽容度内,系统动力学仍可以进行一些研究工作。
综合上述原因,系统动力学适合于研究第三方物流系统中的成本问题,它可以根据第三方物流系统中各因素的因果性和明显的“白箱”结构,来构造出能反映非线性、多重反馈和存在时滞的动态模型,并用计算机仿真的方法来实现动态系统的运动过程,并分析其中人为因素即决策因素对系统运动的影响。
§3-4基于系统动力学的第三方物流成本建模分析
常见的第三方物流企业提供的服务包括运输、仓储、装卸搬运、包装、配送、流通加工和物流信息服务等环节。在实际的运作中,国内第三方物流企业的服务内容大都集中于传统意义上的运输、仓储范畴之内。即使第三方物流企业提供了完整的物流链服务内容,对大多数企业来讲,运输通常代表着物流成本中最大的单项成本,货物运输费用占物流总成本的三分之一到三分之二。与运输联系密切并且在第三方物流系统中发挥着同样重要作用的库存功能,其成本占到了第三方物流系统总成本的30%左右[9]。因此,可以说运输和库存活动是第三方物流系统中降低成本、提高效益的关键影响因素,也是制约第三方物流企业发展的瓶颈。由于第三方物流系统中各物流活动对整个物流系统的影响力不同和论文篇幅有限,在建模过程中,主要针对比较重要且占第三方物流活动总成本比例较高的运输和库存系统进行研究。3-4-1模型建立目的
运输和库存作业成本占到了第三方物流企业物流活动成本的一多半,由于物流系统效益背反
现象的存在,单单对某项物流活动采取降低成本的措施,很可能会引起其他物流活动成本的提高。系统地看待第三方物流企业的物流活动,本着整体较优的原则,解决第三方物流系统运营的成本问题,显得紧迫而有必要。因此,本论文建模目的如下:
(1)根据第三方物流企业实际运营的一般性特征,分析影响第三方物流企业运输和库存成本的主要内、外部因素并对其进行简化。根据各因素之间的联系,确定模型结构和各变量间的数量关系。
(2)对模型进行运行,针对一具体的第三方物流企业带入数据,仿真其运输和库存系统成本变化情况。将仿真结果与历史数据进行比较,检验模型的有效性。
(3)预测此第三方物流企业今后三年36个月的系统成本发展趋势并进行分析。
(4)针对存在的问题,提出解决方案,并做出政策性建议。
3-4-2模型系统边界及变量、函数的确定
确定系统边界的过程,即确定系统包含哪些重要的系统要素的过程。在确定系统边界时,本文遵循22以下的基本原则:
(1)目的原则:由于系统动力学是把所研究的系统问题构造成一个系统动力学模型,借助于计算机模拟技术进行定量研究,所以构造模型要做到面向问题,面向解决,而不能笼统的去面向系统。
(2)就简原则:尽可能缩小边界的范围,如果没有该变量要素,仍能达到系统研究的目的,那么就应该不要把该变量要素列为边界内。因为无论怎样精确的模型都只是真实系统的简化,只能反映其内在的本质和某些断面或侧面,不可能面面俱到。所以,建模时只要找出系统的主链结构,对其内容精心提炼筛选即可,但一定不是对实际系统简单的复制。
(3)有效原则:指构造出的模型置信度要高,即构造出的模型一定要确切地表述所研究的系统问题,模型的行为及产生的策略等是有用的,可信赖的。在建模的构思、调试、运行等过程中,要根据所研究的系统的整体性、层次性、复杂性等特性,对系统结构进行灵活而正确的分解与综合。在明确了建模目的和系统边界界定的原则之后,通过对第三方物流企业运输、库存成本的系统思考和相关理论、实践总结相结合,根据第三方物流企业一般性成本结构情况,确定该模型的边界为:
第三方物流企业月运输量及需求增长率;
第三方物流企业库存量及每月入库量、出库量;
第三方物流企业货物运输费率及影响因素;
第三方物流企业库存总成本及构成因素。
以上系统边界可以在就简原则之下,最有效地达到研究的目的。根据本文建模目的和系统边界,归纳出第三方物流企业运输及库存系统的主要变量:
(1)状态变量。
状态变量是在系统动力学模型研究中随着时间变化的积累量。确定为状态变量必须具备一个必要条件,即建模者能获得其初始值数据。
本模型确定运输量和库存量为系统的状态变量,是决定系统运行下去的关键因素。
(2)速率变量。
当状态变量确定以后,对应的速率变量自然跟随而来。它的变化影响着状态变量的增加或减少。状态变量的对应速率变量有3种类型:①流入率与流出率都不恒等于零;②流入率恒等于零或流出率恒等于零;③流入率与流出率为合成流率。对于一个具体的状态变量,其速率属于何种类型决定于实际背景,其中包括与实际精确度要求有关。
本模型确定月运输需求增长率、入库量、出库量为系统速率变量。月运输需求增长率代表了
运输量的流入速率,入库量和出库量分别代表状态变量库存量的流入速率和流出速率。(3)辅助变量。
在复杂系统动力学模型中,状态变量和速率变量之间的依赖关系主要有3种形式:①直接依赖关系;
②间接依赖关系,来源于问题的复杂性,描述这种间接依赖关系必须引进辅助变量;③直接间接依赖关
系,即既直接依赖又通过其他辅助变量间接依赖,也必须引进辅助变量。辅助变量的引进一般来说有3种搜索方法:①从速率变量开始向状态变量方向搜索;②从状态变量开始向速率变量方向搜索;③分别从状态变量、速率变量开始相向搜索。
模型中确定的辅助变量有:运输费率、运输货损成本、延迟、货损率、货损量、缺货成本、货物出入库成本、储存成本。
(4)常量。
常量作为系统的输入值一般不随系统的动态变化而变化。
本模型中的常量有:缺货成本系数、期望库存,用来确定系统中的辅助变量缺货成本;货物出入库成本率,用来确定辅助变量货物出入库成本;单位储存成本率,用来计算库存系统中的储存成本大小。除了确定系统变量,我们还要对系统中的变量进行函数的定义。Vensim 软件提供了三十余种函数,
本模型中拟用的主要函数有以下几种:
(1)表函数。
模型中往往需要用辅助变量描述某些变量间的非线性关系,显然这种非线性关系简单地由其他变量进行代数组合已不能胜任。若所需的非线性函数能以图形的形式给出,那就十分方便了。Vensim中表函数定义的功能正是给我们提供了这种便利性。比如价格与市场份额的关系。由于特定价格的市场份额不可能精确地确定,但我们都知道,价格越低,相应的市场份额就越高,于是可以用图形来确定价格与市场份额的关系,如图3.4。
模型中用表函数定义的变量有:月运输需求增长率、运输量影响因子、运输距离影响因子、实载率影响因子、在途存货成本率和运输延迟影响系数。
23
(2)INTEG()函数。
举例来说明这个函数:仓库现有商品100件,如果向外面发货则库存下降,向仓库供货则库存上升。显见,仓库库存就是我们前面提到过的状态变量,而供货速率和发货速率为速率变量。系统动力学中,过去时刻、现在时刻、将来时刻分别被称为J时刻、K时刻、L时刻,这个供货、发货行为用系统动力学语言表示就是:
仓库库存.K时刻=仓库库存.J时刻+(供货速率-发货速率)×JK时间段
Vensim提供的INTEG()函数可以等价定义这个表达式为:
仓库库存=INTEG(供货速率?发货速率,100)
它的实质是对(供货速率-发货速率)的积分,100是仓库库存的初始值。
本模型中要用INTEG()函数定义的变量有运输量和库存量。
(3)阶跃函数STEP。
Vensim中阶跃函数的定义式为y=a+STEP(b,n)。表示y的值在前(n-1)周为a,从第n周开始,y值突然上升b,即总共(a+b)。模型中对于出库量这个变量,作者拟采用阶跃函数来定义。
(4)均衡分布函数RANDOMUNIFORM(m,x,s)。
函数中的m表示变量的最小值,x表示变量的最大值。将变量定义成均衡分布函数,表示这个变量值将在m到x之间变化,变量取m到x之间的任一值的几率都是均等的。s是这个函数的种子,若将其取值为0,系统将自动产生一默认的噪声流,来控制变量的变化。
模型中用此函数定义的变量有运输距离、实载率和货损率。
(5)正态分布函数RANDOMNORMAL(m,x,r,h,s)。
这个函数表示变量服从最小值m、最大值x、平均值r、标准偏差h的正态分布。s同样为此函数的种子。
模型中延迟和实载率变量将以这个函数来定义。
(6)IFTHENELSE(a,b,c)函数。
此函数表示如果变量符合a条件,那么它的值为b,否则为c。模型中用到此函数定义的是缺货成本变量。
3-4-3第三方物流企业运输系统模型的建立
在建立模型前,先来分析一下系统中主要变量间的逻辑关系,见图3.5。
根据第三方物流企业的实际运营情况,模型中总运输成本由两部分构成:一是运输量与运输费率的乘积,其中,运输量又受到月运输需求增长率的影响,运输费率则受实载率、运输距离、运输量和在途存货等因素的影响;二是运输货损成本,这部分成本要由每次运输的货损量决定。这些变量之间的具体数量关系将在后文有所介绍。
在明确了系统建模目的和系统变量及各主要变量之间的逻辑关系之后,对第三方物流企业运输系统模型的建立如图3.6所示。
系统建模与Vensim方程解释:
(1)模型中的方框表示运输量是一个状态变量。方程为:
运输量=INTEG(月运输需求增长率,a),量纲:件。表示运输量是月运输需求增长率的积分,初始值为a件。
(2)月运输需求增长率是状态变量运输量的速率变量。从宏观上来看,运输需求的增长是交通运输的发展和经济活动空间相互作用的结果。具体来说,运输需求的增长要受到第一、二、三产业总产值、交通设施供给情况、通货膨胀影响系数等因素的影响。考虑到本论文模型应用范围是针对个体第三方物流企业而言,如果从宏观角度确定影响此变量的因素,得到的将是社会月运输需求增长率,我们可以通
过单个第三方物流企业运输量占社会运输量的百分比来最终确定第三方物流企业月运输需求增长率值,但一个个体物流企业的运输量与全社会运输量相比简直微乎其微,百分数的确定有一定的困难,而且这样一来,不仅兜了一个大圈子,还影响了模型的准确性,提高了其复杂度。因此,对于个体物流企业的月运输需求增长率,通过参考企业历史数据、经营状况和发展方向以及行业情况等多种因素,结合一定的方法,对企业未来的月运输需求增长率做出预测,再通过模型检验其有效性即可。
25
模型中将月运输需求增长率定义成一个随时间变化的表函数,通过月运输需求增长率因子表给出。
(3)模型中总运输成本的Vensim方程式为:
总运输成本=运输量×运输费率+运输货损成本,量纲:元。
(4)运输量和运输距离是影响运输成本的重要因素,结合其他影响因素,再考虑实载率和在途存货成本率的影响,运输费率的Vensim方程表示为:
运输费率=运输量影响因子×实载率影响因子×运输距离影响因子×在途存货成本率,量纲:元/件。
受到规模经济规律的作用,货物提取和交付活动的固定费用以及行政管理费用随装载量的增加而被分摊,因此,每单位重量的运输成本随运输量的增加而减少。模型中运输量影响因子的表函数就是基于这种规律而定义的(见图3.7)。
运输距离越远,运输成本就越高。但受到距离经济规律的作用,随着运距的增加,单位货物的边际运输成本就会减少(见图3.8)。
模型将运输距离变量定义成一个均衡分布函数:
运输距离=RANDOMUNIFORM(a,b,0),量纲:千米。
函数中的a、b有待具体赋值。
实载率是模型中又一影响运输费率的重要因素。模型将实载率变量定义成在a到b之间,均值c,标准方差为d的正态分布函数。
实载率=RANDOMNORMAL(a,b,c,d,0),无量纲。
实载率越高,运输成本就越低,实载率影响因子就越小,实载率影响因子表见图3.9。 运输的两大基本功能是商品的转移和临时储存。商品在运输过程中也有存货成本,这些都要算到运输成本中来。如果商品能按照预定的时间运达目的地,商品的在途存货成本可以忽略不计,如果商品在运输途中存在延迟,将会增加承运人的运输成本。本模型中将商品因运输延迟带来的在途存货成本考虑在列。
这里将延迟变量定义成分布在a 到b 之间,以c 为均值,d 为标准偏差的正态分布函数: 延迟=RANDOMNORMAL(a,b,c,d,0),量纲:天。
不同的延迟天数给公司带来的在途存货成本也不同。我们用表函数来表示延迟对在途存货成本的影
响,见图3.10。
27
需要说明的一点是,即使延迟为0天,也就是运输不存在延迟的时候,延迟影响因子仍大于1,是因为运输不存在延迟的时候,商品在运输过程中也存在在途存货成本,模型这样定义更加接近实际系统。
(5)运输货损成本是总运输成本的另一组成部分,它由运输的货损量来决定。定义第三方物流企业在运输途中每损坏一件商品,平均损失a元。Vensim方程为:
运输货损成本=货损量×a,量纲:元。
货损量=运输量×货损率,量纲:件。
模型中将货损率定义成在a到b之间的均衡分布函数:
货损率=RANDOMUNIFORM(a,b,0),无量纲。
【最新整理,下载后即可编辑】 实验四SIMULINK仿真模型的建立及仿真(一) 一、实验目的: 1、熟悉SIMULINK模型文件的操作。 2、熟悉SIMULINK建模的有关库及示波器的使用。 3、熟悉Simulink仿真模型的建立。 4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。 二、实验内容: 1、设计SIMULINK仿真模型。 2、建立SIMULINK结构图仿真模型。 3、了解各模块参数的设定。 4、了解示波器的使用方法。 5、了解参数、算法、仿真时间的设定方法。 例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK模型,并进行仿真运行。 步骤: 1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器 2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。 图二:已经复制进库模块的新建模型窗 3、从模块库复制所需模块到新建模型窗,分别在模块子库中
找到所需模块,然后拖进空白模型窗中,如图二。 4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。 5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。如图三所示: 图三:已构建完成的新模型窗 6、根据理论数学模型设置模块参数: ①设置增益模块
模型制作资料 一、 模型制作材料、工具及其使用 1、主材类 2、纸质材料 3、打印纸 4、绘图(卡)纸-----制作卡纸模型采用白色卡纸。如果需要其他颜色,可在白色卡纸上进行有色处理。卡纸模型还可以采用不干胶色纸和各种装饰纸来装饰表面,采用其他材料装饰屋顶和道路。 5、厚纸板-----厚纸板是以其颜色与白色的卡纸做区分,有灰色和 棕色制模用的厚纸板------它有一个由泡沫塑料制成的坚固核心,而此核心的两边是用纸张覆盖(粘合)的。 6、瓦楞纸-----波浪纹是用平滑的纸张粘合在一面或是两面上的, 因为具备可卷曲的特性。瓦楞纸的波浪越小、越细,就越坚。 各色不干胶:用于建筑模型的窗、道路、建筑小品、房屋的立面和台面等处的贴饰。 吹塑纸:适宜制作构思模型和规划模型等,它具有价格低廉、易加工、色彩柔和等特点。 仿真材料纸:仿石材、木纹和各种墙面、屋顶的半成品纸张。 各色涤纶纸:用于建筑模型的窗、环境中的水池、河流等仿真装饰。 锡箔纸:用于建筑模型中的仿金属构件等的装饰。 砂纸:砂纸是用来打磨材料,可做室内的地毯和球场、路面、绿地。 二、 木质材料 1.木工板 (木工用平板 细木工板) 2.胶合板-----胶合板是用三层或奇数多层刨制或旋切的单板,涂胶后经热压而成的人造板材,各单板之间的纤维方向互相垂直(或成一定角度)、对称,克服了木材的各向异性缺陷。 3.硬木板(密度板、刨花板)----- 硬木板是利用木材加工废料加工成一定规格的碎木,刨花后再使用胶合剂经热压而成的板材。 4.软木板-----软木板是由混合着合成树脂胶粘接剂的木质颗粒组合而成的。 5.航模板----- 航模板是采用密度不大的木头(主要是泡桐木)经过化学处理而制成的板材。 6.其他人造装饰板-----仿金属、仿塑料、仿织物和仿石材等效果的板材,各种用于裱糊的装饰木皮等。 三、塑料板材 1.ABS 板:ABS 板是一种新型的模型制作材料,称之为工程塑料,ABS 板是现今流行的手工及电脑雕刻加工制作的主要材料。 2.PVC 板:主要成分为聚氯乙烯分为软PVC 板(柔软耐寒,耐磨,耐酸、碱)和硬PVC(易弯曲、
基金项目:河海大学常州校区博士启动基金项目(05B001-03)收稿日期:2006-11-11 修回日期:2006-11-18 第24卷 第12期 计 算 机 仿 真 2007年12月 文章编号:1006-9348(2007)12-0283-04 基于多Agen t 复杂系统仿真平台研究 倪建军,李建,范新南 (河海大学计算机及信息工程学院,江苏常州213022) 摘要:复杂性科学是研究复杂系统和复杂性的一门新兴的交叉学科。基于多主体(Agent )复杂系统仿真技术是研究复杂系统复杂性产生机制的有效手段之一,在众多领域得到广泛应用。为了使研究者从复杂的软件编程中解放出来,集中精力进行科学研究,开发高效的、易用的仿真平台成为推动基于多Agent 复杂系统仿真技术进步的关键。针对目前多Agent 仿真平台存在的局限性,进行仿真平台的结构设计,并开发了原型系统。最后,利用热虫(Heatbug )模型验证仿真平台的有效性。关键词:基于多主体仿真;复杂系统;仿真平台;热虫模型中图分类号:TP311152 文献标识码:B A Com plex System S im ula tion Pla tform Ba sed on M ulti -Agen t N I J ian -jun,L I J ian,FAN X in -nan (College of Computer &Infor mation Engineering,Hohai University,Changzhou J iangsu 213022,China )ABSTRACT:The comp lexity science is a rising interdiscip line which studies the comp lex system and comp lexity . The comp lex system si mulation based on multi -Agent is one of the very useful methods for researching the comp lexity p roducing mechanis m of comp lex system.This method is used in many fields w idely .In order to make the researchers released from the soft p rogramm ing and fix attention on their study,an effective and convenient si mulation p latfor m must be developed,which is a key job to i mp rove the comp lex system si mulation method based on multi -Agent .A i med at the li m itations existing in the si mulation p latfor m at p resent,a frame of si m ulation p latfor m is given out,and the p rototype system is developed .A t last a Heatbug model is used to confir m the validity of the si m ulation p latfor m. KEYWO RD S:Si mulation based on multi -Agent;Comp lex system;Si mulation p latfor m;Heatbug model 1 引言 复杂性科学是研究复杂系统和复杂性的一门新兴的交 叉学科。虽然它还处于萌芽时期,但已被有些科学家誉为是“21世纪的科学”。如何对各类复杂系统的复杂性产生机制的研究成为复杂性科学的关键问题之一。国内外研究表明,传统的建模方法(诸如还原论方法、归纳推理方法等)已经不能很好地刻画复杂系统,需要采用新的建模理论与仿真方法。而基于多Agent 的建模理论和仿真技术是最具活力、最有影响的方法之一,适合于复杂系统的研究[1][2]。目前这种技术在人工生命、经济系统、自然现象、社会科学、人文科学等众多领域都得到了广泛的应用。 仿真平台是进行计算机仿真的软件环境,可以使研究者 从复杂的软件编程中解放出来,集中精力进行科学研究。目前,有较多的关于Agent 系统开发平台的研究,这些平台一般都能用于复杂系统多Agent 仿真,如Cly mer 等人利用仿真平台OPE MCSS 进行复杂交通系统的多Agent 仿真,Pathak 等人利用仿真平台MADKIT 进行复杂供应链的多Agent 仿真,Uhr macher 等人利用仿真平台JAM ES 进行多个协商Agent 的分布式并行仿真。其他有代表性的仿真平台还有美国圣菲研究所的仿真平台S war m 、美国B rookings 研究所的A scape 仿真系统、芝加哥大学的Repast 仿真平台、美国I O WA 州立大 学的T NG -L ab 软件系统[3]-[5] 等等,这些平台为研究者进行研究提供了很大的帮助,然而,由于开发者的局限性和计算机技术的发展,目前许多基于Agent 的仿真平台都存在着一定的局限性,如支持复杂适应系统理论研究的工具和环境———S war m,虽然应用的人很多,为研究者提供了很大的便利,但是它还只是一个简单的系统,对一些复杂问题的仿真
人机功效评价解决方案 Jack 人体仿真及建模系统 Jack是一个人体建模与仿真软件解决方案,帮助各行业的组织提高产品设计的工效学因素和改进车间的任务。jack最初是由宾夕法尼亚大学的人类模型和模拟中心(Center for Human Modeling and Simulation at the University of Pennsylvania)开发,目前是西门子PLM旗下的一员。使 用Jack可以: 1、建立一个虚拟的环境 2、创建一个虚拟人 3、定义人体大小和形状 4、把人放在环境中 5、给人指派任务 6、分析人体如何执行任务 从jack获得的信息可以帮助您设计更安全、更符合人体工程学的产品、工作场所和更快的流程和使用更低的成本。 第1步:建立一个虚拟的环境 除了人体建模之外,jack还是是一个功能强大的互动性、 实时视景仿真解决方案。您可以导入CAD数据或从草图
开始建立模型,在周围的环境中移动物体,交互式地改变相机的视图和创建特殊效果,以提高您“现场”的真实性。 导入CAD模型-jack可以导入基于VRML,IGES,立体(STL)的和inventor (iv)文件格式的3D 图形数据。此外,软件提供了减小CAD数据的功能来优化模型,用于实时仿真。OpenGL Optimizer的使用可以在不损害视频保真度的情况下相当程度的减少模型的棱角。 在jack中创建几何图形-jack允许您从草图开始建立模型,用于概念设计。您可以创建简单的几何图形,如立方体、球、圆柱、圆锥和圆环。熟练操作后,您可以合并这些简单的图形成为更加复杂的部件,如机械工具和车辆。jack还提供了一套基本的工具(锤子,钳子,梯子,棘轮,锯,螺丝刀和扳手)。 给您的环境一个真实的外观-jack的视图,纹理映射和照明功能,帮助您赋予您的虚拟环境更有说服力的外观。 在jack中可以很容易地改变视图,通过鼠标按钮可以基于一个参考点,水平或垂直或放大“相机”。此外,您也可以将视图参考点定位到指定的对象上,为某些对象加上相机,如人的眼睛,并建立剖视图。使用纹理映射,基础的图像文件,如云彩、公路、工厂内部或机器的控制面板可用于增加视觉细节场景,而不会增加额外的几何形状。jack的经典照明能力,可以帮助您突出环境中的区域和加强场景的真实感。
永磁同步电机控制系统仿真模型的建立与 实现
电机的控制 本文设计的电机效率特性如图 转矩(Nm) 转速(rpm) 异步电机效率特性 PMSM 电机效率特性 本文设计的电动汽车电机采用SVPWM 控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM 的趋势[2]。 基于上述原因,本文结合0=d i 和SVPWM 控制技术设计PMSM 双闭环PI 调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID 控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI 控制器参数[4]。 1. PMSM 控制系统总模型 首先给出PMSM 的交流伺服系统矢量控制框图。忽略粘性阻尼系数的影响, PMSM 的状态方程可表示为 ??????????-+????????????????????----=??????????J T L u L u i i P J P L R P P L R i i L q d m q d f n f n m n m n m q d ///002/30//ωψψωωω& && (1) 将0=d i 带入上式,有 ???? ??????-+??????????? ??? ??--=????? ?????J T L u L u i J P P L R P i i L q d m q f n f n m n m q d ///02/3/0ωψψωω& && (2) 转 矩 (N m )转速 (n /(m i n )) 效率 转速 (rpm) 转矩 (N m )
知识点2 1. 结合具体制造系统或服务系统,分析离散事件动态系统的基本特征。 2. 什么叫“状态空间爆炸”?产生状态空间爆炸的原因是什么?它给系统性能分析带来哪些 挑战? 3. 常用的离散事件系统建模方法有哪些,它们是如何分类的? 4. 什么是马尔可夫特性?它在离散事件系统建模与分析中有什么作用? 5. 根据功能不同,仿真模型(程序)可以分为哪三个层次?分析三个层次之间的关系。 6. 分析事件调度法、活动循环法、进程交互法和消息驱动法等仿真调度方法的特点,在分 析每种调度方法基本原理的基础上,阐述几种仿真调度方法之间的区别与联系,并绘制每种仿真调度方法的流程图。 7. 结合具体的离散事件系统,如银行、理发店、餐厅、超市、医院、作业车间等,采用事 件调度法、活动循环法或进程交互法分析建立此类系统的仿真模型,试分析仿真模型中的建模元素以及仿真调度流程。 8. 从系统描述、建模要点、仿真时钟推进机制等层面,比较事件调度法、活动循环法和进 程交互法的异同之处。 9. 什么叫仿真时钟,它在系统仿真中有什么作用?什么叫仿真时钟推进机制?常用的仿真 时钟推进机制有哪些?它们的主要特点是什么,分别适合于怎样的系统? 10.结合具体的离散事件系统,分析若采用固定步长时间推进机制、下次事件时间推进机制 或混合时间推进机制时,分别具有哪些优点和缺点,以图形或文字等形式分析时钟推进流程。 11.什么叫仿真效率?什么叫仿真精度?分析影响仿真效率和仿真精度的因素? 12.从仿真效率和仿真精度的角度,分析和比较三种仿真时钟推进机制的特点,并分析三种 仿真时钟推进机制分别适合于什么样的系统? 13. 什么是蒲丰投针试验?绘制蒲丰投针试验原理图,通过推导蒲丰投针试验中针与任一直 线相交的概率,分析采用随机投针试验方法来确定圆周率π的原理。 14. 按照蒲丰投针试验的条件和要求,完成投针试验,在统计投针次数、针与直线的相交次 数的基础上,求解π的估计值,并以报表或图形等形式表达试验结果。具体要求如下: ①自行确定针的长度、直线之间的距离。 ②投针10次、20次、30次、40次、50次、…、100次、…、200次、…,分别计算针 与直线相交的概率、π的估计值。 ③以一随机变量描述上述试验结果,并通过编程或采用商品化软件,以图形、报表等形 式表示投针试验结果,分析其中的规律,并给出结论。 ④写出试验报告。 ⑤在熟悉投针试验原理的基础上,编制投针试验仿真程序,动态运行投针试验的过程。15.什么是蒙特卡洛仿真?它有什么特点,蒙特卡洛仿真应用的基本步骤是什么? 16.采用C或C++等语言,分别编写产生均匀分布、正态分布、指数分布以及威布尔分布的伪随机数序列,通过改变每种分布中参数的数值,分析不同参数数值对随机数值的影响;通过对所产生的伪随机数分布区间的统计、分析和绘图,检验伪随机数的特性及其数值特征。 17. 对于制造系统而言,库存有哪些作用和功能? 18. 在制造企业中,库存大致可以分成四种类型。简要论述四种库存的名称和功能。 19. 什么是安全库存、订货提前期?确定安全库存和订货提前期时分别需要考虑哪些因素? 20. 什么叫“订货点法”?要确定订货点,需要哪些条件?订货点法适合于怎样的库存系统?
建筑制作项目流程 1、制作前期策划 根据甲方提供的平面图、立面图、效果图及模型要求,制定模型制作风格。 2、模型报价预算 预算员根据[1]、模型比例大小、材料工艺及图纸深度确定模型收费、签订制作服务订单。 3、制作组织会审 技术人员将核对分析图纸,确定模型材质、处理工艺、制作工期及效果要求。 (1)建筑制作进程: 建筑制作师根据甲方提供的图纸施工制作,效果以真实、美观为原则。所有建筑均采用AutoCAD绘图,电脑雕刻机切割细部、建筑技师手工粘接的流水线作业法,既保证了各部件的质量又保证了工期。 (2)环境景观设计制作进程: 总体环境将由专业景观设计师进行把控。专业制作人员结合图纸进行设计制作。原则是根据甲方的设计图纸再现设计师的设计意图。切不可胡乱操作,自由发挥。同时使用仿真树木、小品、雕塑等进行点缀,使得整个景观部分美观精致。 (3)建筑环境灯光组装: 灯光系统根据甲方要求进行设计制作,体现沙盘的夜景效果。 4、制作完工检验 质检部经理及项目负责人对照图纸,进行细部检查和调整。 5、模型安装调试 模型服务人员在模型展示地现场调试安装清洁,达到甲方满意后离开。 编辑本段 建筑模型分类 黏土模型 黏土材料来源广泛取材方便价格低廉经过“洗泥”工序和“炼熟过程其质地更加细腻。黏土具有一定的粘合性可塑性极强在塑造过程中可以反复修改任意调整修刮填,补比较方便。还可以重复使用是一种比较理想的造型材料,但是如果黏土中的水分失去过多则容易使黏土模型出现收缩龟裂甚至产生断裂现象不利于长期保存。另外,在黏土模型表面上进行效果处理的方法也不是很多,黏土制作模型时一定要选用含沙量少,在使用前要反复加工,把泥和熟,使用起来才方便。一般作为雕塑、翻模用泥使用。 油泥模型 油泥是一种人造材料。凝固后极软,较软,坚硬。油泥可塑性强,黏性、韧性比黄泥(黏土模型)强。它在塑造时使用方便,成型过程中可随意雕塑、修整,成型后不易干裂,可反复使用。油泥价格较高,易于携带,制作一些小巧、异型和曲面较多的造型更为合适。一般像车类、船类造型用油泥极为方便。所以选用褐油泥作为油泥的最外层是很明智的选择。油泥的材料主要成分有滑石粉62%、凡士林30%、工业用蜡8%。 石膏模型 石膏价格经济,方便使用加工,用于陶瓷、塑料、模型制作等方面。石膏质地细腻,成型后易于表面装饰加工的修补,易于长期保存,适用于制作各种要求的模型,便于陈列展示。 塑料模型 塑料是一种常用制作模型的新材料。塑料品种很多,主要品种有五十多种,制作模型应
实验四 SIMULINK仿真模型的建立及仿真(一) 一、实验目的: 1、熟悉SIMULINK模型文件的操作。 2、熟悉SIMULINK建模的有关库及示波器的使用。 3、熟悉Simulink仿真模型的建立。 4、掌握用不同的输入、不同的算法、不同的仿真时间的系统 仿真。 二、实验内容: 1、设计SIMULINK仿真模型。 2、建立SIMULINK结构图仿真模型。 3、了解各模块参数的设定。 4、了解示波器的使用方法。 5、了解参数、算法、仿真时间的设定方法。 例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。 步骤: 1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器 2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。 图二:已经复制进库模块的新建模型窗 3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。 4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。 5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。如图三所示:
第一章promodel简介 promodel 是一套功能相当强且容易使用的数据及图型导向系统仿真软件,它提供模块(module)的观念及操作方式让使用者可弹性的设计多种生产系统并进行仿真及分析。从小型化工厂(small job shops),大型工厂生产(large mass production)及先进的柔性弹性制造系统(flexible manufacturing system)皆可容易的规划及模拟。 Promodel系统中提供使用者人性化的操作接口环境。只要利用鼠标或键盘根据功能项目选择所需的构建工具(location & resource)、工作组件(part)及操作设定(operations),就可以不需撰写任何程序(此乃相对于一些高阶仿真语言如SLAM等而言),而完成一系统仿真的环境。另外软件更提供使用者可测试追踪(trace)系统内每个操作步骤、每个工作站、工作母机执行的情形。因此使用者在开发中即可方便的进行测试与除错,并于完成是可动态的撷取其所需点的使用情形。 因此,哪怕系统大到2000格操作机、工作站及几千几百的操作流程都能在极短的时间内完成开发、测试的工作或根据统计的数据调整系统内各资源的工作量及操作速度等设定参数,以达到系统所设定目标之最佳化。 在定义整个系统的输入输出因子、组装、包装、加工等作业流程,甚至流程的逻辑及运作优先规则时,都能借着设定参数或利用条件变量而弹性调整,也可以利用外在的程序语言控制,来改变系统的状态。例如:在仿真整个工厂的生产流程中:人员、机器、物料、无人搬运车(AGV)、夹具、机器手臂(robot)、输送带(conveyor),都能利用系统提供的传输模块以设定其速度、容量、加速度、运作顺序、方向等。 在规划设定好系统后,于仿真执行前,promodel会先行测试系统,检查各相关工作站输入、输出是否平衡。假如有忘记设定的容量、速度等,系统都能自动帮使用者假设并询问意见,如果不满意可以再修改。真正在模拟的时候又可随时观察各资源(resource)使用情形。使用者可追踪系统运作流程,随时中断仿真,并藉系统仿真后,所产生的运作过程统计数据,统计各工作站、资源使用率等。此外promodel也提供简单且易读的统计图、统计报表文件,因而可方便的了解全部资料利用的情形。一些常见的promodel应用包括:1.产能规划 2.瓶颈分析 3.厂房布置 4.生产排程 5.“日本JIT”系统规划 6.生产周期分析 此外promodel 又可让设计者藉调整工作站数量、速度、输入方式、输出方式(如:批次),以作整体系统的各种可能状况下的评估,以作为将来真正建造设计时的参考,使用及分析弹性相当宽广。 Promodel 不仅应用于生产领域,它可以用于仿真任何一种离散时间流程系统。例如:港口、供应链系统、分销系统以及其他一些物流系统。
创建基于DLL的Proteus VSM仿真模型 作者:silingsong 一、Proteus VSM仿真模型简介 在使用Proteus仿真单片机系统的过程中,经常找不到所需的元件,这就需要自己编写。Proteus VSM 的一个主要特色是使用基于DLL组件模型的可扩展性。这些模型分为两类:电气模型(Electrical Model)和绘图模型(Graphical Model)。电气模型实现元件的电气特性,按规定的时序接收数据和输出数据;绘图模型实现仿真时与用户的交互,例如LCD的显示。一个元件可以只实现电气模型,也可以都实现电气和绘图模型。 Proteus为VSM模型提供了一些C++抽象类接口,用户创建元件时需要在DLL中实现相应的抽象类。VSM模型和Proteus系统通信的原理如下图: 绘图模型接口抽象类: ICOMPONENT――ISIS内部一个活动组件对象,为VSM模型提供在原理图上绘图和用户交互的服务。 IACTIVEMODEL――用户实现的VSM绘图模型要继承此类,并实现相应的绘图和键盘鼠标事件处理。 电气模型接口抽象类: IINSTANCE――一个PROSPICE仿真原始模型,为VSM模型提供访问属性、模拟节点和数据引脚的服务,还允许模型通过仿真日志发出警告和错误信息。 ISPICECKT(模拟)――SPICE拥有的模拟元件,提供的服务:访问、创建和删除节点,在稀疏矩阵上分配空间,同时还允许模型在给定时刻强制仿真时刻点的发生和挂起仿真。 ISPICEMODEL(模拟)――用户实现的VSM模拟元件要继承此类,并实现相应的载入数据,在完成的时间点处理数据等。 IDSIMCKT(数字)――DSIM拥有的数字元件,提供的服务:访问数字系统的变量,创建回调函数和挂起仿真。
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
电力变压器仿真模型的设计 目录 绪论 ............................................................ - 6 -一.本课题意义...................................................................... - 6 -二.本文主要工作.................................................................. - 7 -三.使用工具介绍.................................................................. - 7 - 第一章变压器的基本原理 ...................... - 8 -§1.1变压器的工作原理 ......................................................... - 8 -§1.2 单相变压器的等效电路 .............................................. - 10 -§1.3 三相变压器的等效电路及连接组问题 ...................... - 11 - 第二章变压器仿真的方法简介 ............ - 13 -§2.1 基于基本励磁曲线的静态模型 .................................. - 13 -§2.2基于暂态磁化特性曲线的动态模型 ........................... - 14 -§2.3非线性时域等效电路模型 ........................................... - 15 -§2.4基于ANN的变斜率BP算法 ..................................... - 16 - 第三章单相变压器的仿真 .................... - 17 -§3. 1 单相变压器仿真的数学模型 ..................................... - 18 -
一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。 软件名称简介 (1)20-sim 20-sim是由Twente大学控制实验室开发的运行于Windows系统下的建模与仿真软件。作为著名软件包TUTSIM的后续产品,它完全支持图形建模,让用户在直观和友善的方式对动态系统进行设计和分析,同MATLAB和Simulink可以方便的进行建模与仿真的交互。使用20-sim,我们可以仿真动态系统(例如电力、机械、水动力系统或它们的组合系统)的各种行为。 (2)arena该软件可以用来模拟服务、制造、运输、物流、供应链和其它系统。(3)Automod该软件提供了真实的三维虚拟现实动画,使得仿真模型非常用以理 解;提供了高级的特征让用户可以仿真复杂的活动,如机器人、设 备工具、生产线等的运动和转动。该软件还为用户提供了一套基于 专家系统的物料搬运系统,它是根据工业自动化的真实运行经验开 发的。这些包括输送链、自动存储和检索系统,桥式起重机等。(4)Awesim Awesim提供生产系统动态模型的仿真机。动画使用图形界面构建, 用户可以对交互式仿真进行特定的控制。 (5)Easy5由波音公司开发的用来模拟和仿真包含水力、风力、机械、热、电 子和数字等子系统的动态系统软件包。包括了一整套控制系统建 模、分析和设计功能。 (6)Idef该软件是一种流程图析软件,可以非常容易的适用流程图来绘制和 表述流程。它能够提供比传统流程图更多的信息。流程中包含的流 程、流程约束、人和其他资源能够被整合到一起。 (7)Intrax该软件能够提供许多被建模和仿真实际流程的管理决策。它能够被 用来执行战略(同战略视图,同步价值链视图相符合的现实),流 程改善(工序改善、生产力改善、节约循环时间),同步价值链(动 态视觉,同步约束)和日常运作(可对比的运作替代方案,短期变 化影响力的检验)等的模拟和仿真。 (8)Manufacturing Engineering 该软件提供离散仿真功能来解决制造问题和设计制造方案。它在广阔的应用领域中预测产出率,人工和其他的绩效。 (9)Matlab该软件是组合的数字计算、高级图形技术和可视化、高级编程语言 的集成计算机算环境。Simulink式用来对动态系统进行建模、仿真 和分析的交互式工具。它可以构建图形化的结构图,模拟动态系统, 评估系统绩效和精炼设计。 (10)Modsim该软件可以用来仿真像港口,铁路网和航空管制等的管理模型。还 可以用来仿真制造系统。 (11)Promodel该软件可以对制造系统、仓储系统和物流系统的评估、规划或重新 设计进行仿真。典型应用包括精益制造的实施,周期事件的降低, 设备投资决策,产出率和能力分析,识别和排除瓶颈,资源分配等。
在工厂的数字化过程中,仿真是很重要的一环。把生产过程数据形象化的表现出来并进行验证是仿真的重要作用。在这些仿真中,生产制造系统仿真过程是其中重要的组成部分。那么哪家仿真技术比较好呢? 第一要看行业经验几年的和十几年的公司除了在人员人才方面的培养肯定没有后者好。而且累计的相关经验也没有后者充足。 第二要要看团队实力成熟的团队有先进的管理方法和服务理念。 第三地域优势服务网络遍布全国各地那么后期的服务肯定有效及时。 第四技术优势百人的数字研发团队,实力雄厚。这样的公司可以帮我们更好的展现设计。 今天给大家介绍一下生产制造系统的仿真过程和目前比较流行的仿真软件。生产制造系统仿真过程可以分为四个部分,前期准备、仿真规划、建模、仿真优化。在仿真规划阶段,需要明确仿真要解决的问题,搜集需要的资料;建模阶段则包括设备及流程的建模;仿真优化则是对整个生产系统进行调整优化。 生产制造系统的仿真是个复杂过程,不仅需要掌握仿真软件的操作技术,还需要对工厂的工艺、生产、流程等有相当的了解。
生产系统仿真需要收集大量的资料,包括厂区布局图、设备清单与设备规格说明、生产线产品及零部件清单,零部件三维模型、厂区效果图、线边仓对应零部件或半成品数量、产品模型、工艺说明书、工艺布局图、工装夹具、工时定额、物料信息表,各工位上人员和设备的动作顺序、动作时间、动作路径信息等。布局仿真的建模主要是厂区、厂房、生产线、物料等对象的3D 建模或模型处理,其要点在于模型的几何精度、精细度、数据量、纹理贴图效果等要符合预定要求。物流仿真的建模则包括不同类型的设备与生产资源的实现逻辑建模;生产线流程的时序逻辑建模等;工艺过程建模是在布局模型基础上,依据工位操作内容建立人员和设备的运动模型(运动路径与速度等)、工位上运动时序模型等。 目前对于进行生产制造系统仿真的软件尚无明确的定义,名称也不统一,有些称为生产系统建模与仿真软件,有些则称为生产系统规划与仿真软件,有些又称为生产仿真软件,还有称为数字化工厂仿真软件的。这里介绍几种比较常用和流行的,更多的大家可以补充。 以上是关于模型的相关信息,希望能帮到您。
目录 项目概述 (1) 1课程设计内容 (2) 2.仿真的目标 (2) 3Flexsim仿真步骤 (3) 3.1模型建立 (3) 3.2参数设置 (4) 3.3模型运行 (8) 3.4模型优化 (9) 3.5仿真模型运行及结果统计 (10) 4结论 (12)
项目概述 随着计算机信息技术的发展,现代企业生产规模的不断扩大和竞争的日益加剧,市场对企业物流系统提出了新的要求,仓储型物流中心系统也越来越受到关注并得到广泛应用,对其运行效率的研究也成为企业关注的焦点。计算机仿真软件能够进行离散系统建模仿真,是仓储物流中心仿真分析的理想选择。根据仓储型物流中心基本组成和作业流程,将仓储型物流中心剖析为入库、存取、出库三个部分。通过模拟仓储物流中心系统,对仓库物流过程进行整体分析。结合各个作业特点,对仿真的总体流程进行研究,找出其瓶颈,并对其进行优化。
1课程设计内容 ①仓储型物流中心是指将进货的商品临时保存在仓库中,然后根据需要出库的物流中心。以仓储型物流中心的模型为例,学习自动立体仓库、处理器、暂存区、传送带、机器人、运输器等设备来建立模型的方法以及关于这些设备的设定方法。 ②系统描述:具有自动立体仓库的出货传送线的模型。从2处投入口进来的2种商品沿传送带流动,在合流点合流的商品在装货中转站由机器人堆放在货架上。存储在货架的经传送带传输,在卸货中转站由机器人将商品卸下投放到分流线上去。 2.仿真的目标 在进行系统仿真时,首先要确定仿真的目标,也就是仿真要解决的问题:然后是系统调研阶段,调研的目的是为了深入了解系统的总体流程、各种建模参数,以便建立系统模型:最后进入实际建模阶段总的说来可以将仿真过程分为三个部分:①系统分析阶段:②仿真模型建立:③仿真结果输出及分析。如图1所示: 图1
(5)调查、搜集有关资料。系统动力学模型被认为是真实系统的“实验室”,要想通过模型模拟和剖析真实系统,获取更丰富、更深刻的信息,进而寻求解决问题的途径,“实验室”的建立是至关重要的。而要建好“实验室”,就必须在认真调查研究的基础上,花大力气搜集、完备各种资料。毫无疑问,为使模型更真实地反映系统,收集的资料应越多越好。但是,要强调的是,资料搜集工作必须紧紧围绕着研究目的进行,如果偏离了研究目的,即使资料再多也是徒劳的,而且还会给资料的筛选带来许多困难。 3-2-2-2构建模型 模型的构建,是系统动力学研究、解决问题的关键性的一个步骤。系统动力学模型的建造,一般包括如下两个相互联系的工作环节。 (1)分析系统结构。在需要研究的问题已经明确、系统中的重要变量与参考模式已经确定、资料搜集工作也已基本完成之后,就要研究系统及其组成部分之间的相互关系、系统中的主要变量与其它有关变量之间的关系、分析系统的结构。为了使建模工作一开始就能把握整个研究过程的方向,建模者首先要分析系统整体与局部的关系,然后分析变量与变量之间的关系,最后把这些关系转化成反映系统结构的因果关系图或流图。 因果关系图,是反映变量与变量之间因果关系的示意图。其中,变量之间相互影响作用的性质用因果关系键来表示。因果关系键中的正、负极性分别表示了正、负两种不同的影响作用。因果关系键把若干个变最串联后又折回源发变量,这样便形成了一个反馈回路。对于反馈回路,也有正、负极性之区别。如果沿着某一反馈回路绕行一周后,各因果关系键的累计效应为正,则该回路为正反馈回路,反之则为负反馈回路。正反馈具有自我强化的作用机制,负反馈则具有自我抑制的作用机制。 因果关系图虽然能够描述系统反馈结构的基本方面,但不能反映不同性质变量的区别。譬如,状态变量是系统动力学中最重要的变量,它具有积累效应。正是由于状态变量的积累效应,才使系统动力学模型的计算机模拟成为可能。为了进一步揭示系统变量的区别,分别用不同的符号代表不同的变量,并把有关的代表不同变量的各类符号用带箭头的线联结起来,便形成了反映系统结构的流图。 系统动力学认为,系统中包含连续的、类似流体流动与积累的过程。我们可以将这个过程用流图来表示。例如,图3.2是一个表示系统中兔子数量变化的流图。流图中的未成年兔和成年兔是状态变量,表示其是一个积累变量;兔出生率、成熟率和兔死亡率均为速率变量,随着时间的推移,它们使相应的状态变量的值增或减;图中云状的符号表示源与漏,两者都是抽象的概念,代表输入与输出状态的一切物质,在这里,它们表示此模型不考虑小兔的来源与老兔的去向,把它们都放到界限之外。 18 对于复杂的流图,回路中还存在其他变量,这些变量能够帮我们建立状态变量、速率变量等变量之间的联系,我们称其为辅助变量。 (2)建立DYNAMO方程。在DYNAMO模型中,主要有六种方程,其标志符号分别为:L状态变量方程; R速率方程;
第27卷第6期武汉理工大学学报?信息与管理工程版 VoI.27No.6 2005年12月 JOURNALOFWUT(INFORMATION&MANAGEMENTENGINEERING)Dec.2005 文章编号;1007—144X(2005)06--0019--04 通信设备训练仿真系统通用模型的建立 雷 峻 (武汉理工大学自动化学院,积北武汉430070) 摘要;针对目前各种通信设备需要开发相应的仿真训练系统的情况t分析了这些设备的共性后,提出了建立系统通用模型的总体思想。在该思想中归纳的建模原则和建模规范的指导下,对SDH光纤通信训练仿真系统建立总体功能模型,说明该通用模型思想的合理性。关键词;通信设备;训练系统仿真;通用模型中围法分类号:TN915.02;TP391.9 文献标识码:A 1引言 当今时代信息的迅速交流已经成为社会发展不可缺少的因素之一。作为信息传递途径的通信系统,如果能可靠地处于最佳运行状态,就要求操作管理人员具有高度熟练的技能,因此,对这些人员的有效培训显得十分重要。 研制仿真系统的目的是为了能够脱离实体进行人员培训和日常训练,因此仿真系统在功能上主要是要做到使仿真系统和实际的设备在界面外观上和操作回显、实时告警等行为上做到完全一致。仿真系统特有的仿真模型的建立可有助于在仿真过程中用一种系统模型的完备的映射关系来模拟实际的信号流程,做到在行为和结果上的仿真系统和实际设备的一致“j。 目前很多机构已经就各单位实际使用的一些通信设备分别研制出了相应的训练仿真系统,但是每个系统的开发周期长,不同机型的终端界面大相径庭,开发出的产品通用性和可移植性差,使得平台之间的接口困难。因此,提出建立一种通用模型的总体思想,以此提高它们的开发效率。 2模型的提出 在对目前通信领域中应用比较普遍的SDH光纤通信设备、C&08程控交换机和ZXJlO程控交换机、SX一2000S交换机等设备进行分析后认 为,它们具有以下基本特征; (1)对于交换机的软件系统,其显示和操作方式随着机型不同而不同,但归根结底它们都是在硬件设备配合下,通过若干操作完成一定功能。 (2)对于交换机的硬件系统存在着与软件类似的情况。虽然不同机型交换机硬件由于其控制方式、功能模块划分方式,甚至是外形等的不同, 导致具体电路单板的差异,但从整个呼叫流程来 看,其提供的硬件功能支持是基本一致的。另外,训练仿真系统的模型不是利用映射关系建立的基础模型,而是在课题研究所需的特定条件下建立的集总模型。利用这种模型实现的仿真系统,其功能划分只注重输入输出性状的一致,而不要求内部结构具有同态性,即其内部功能实现对用户可封装起来。这样,就可以在满足仿真研究要求和目的的前提下,以硬件功能为依据,以相同的输入输出为接口建立起通用的模型。 因此,无论对哪种通信设备开发仿真训练系统,都可以先简单地划分为3个抽象的模型:底层的数据库模型、中间层的系统运行算法模型和高层的可视化界面模型来实现。仿真系统模型结构如图1所示。系统数据库模型记录通信系统的组 成、参数、工作状态和系统数据等;系统运行算法 模型是系统运行机制的算法模型,描述可视化界面模型操作对数据库模型的映射方式和数据库模型对可视化界面模型的映射方式;可视化界面模 收稿日期:2005—07—20 作者简介:雷峻(1971一),男,江西南昌人.武汉理工大学自动化学院讲师 万方数据