
飞思卡尔电路 Prepared on 22 November 2020
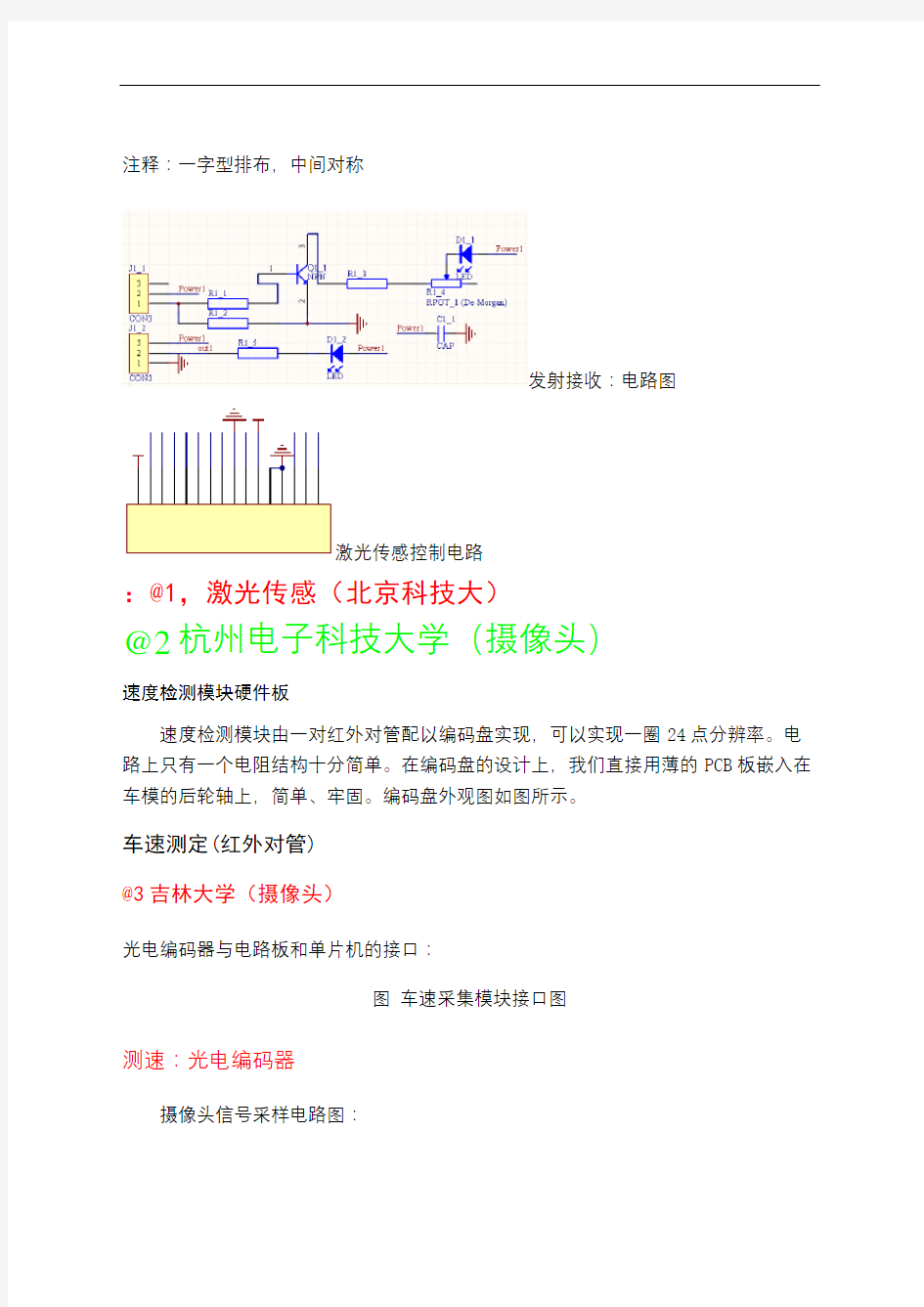
注释:一字型排布,中间对称
发射接收:电路图
激光传感控制电路
:@1,激光传感(北京科技大)
@2杭州电子科技大学(摄像头)
速度检测模块硬件板
速度检测模块由一对红外对管配以编码盘实现,可以实现一圈24点分辨率。电路上只有一个电阻结构十分简单。在编码盘的设计上,我们直接用薄的PCB板嵌入在车模的后轮轴上,简单、牢固。编码盘外观图如图所示。
车速测定(红外对管)
@3吉林大学(摄像头)
光电编码器与电路板和单片机的接口:
图车速采集模块接口图
测速:光电编码器
摄像头信号采样电路图:
图
摄像头信号采样电路图
:5v电压电路
合肥工大:光电(两层排布)
光栅盘测速,如图所示。光
栅盘是从机械鼠标上拆下来,总共有50个齿。将栅盘直接用热熔胶粘接在后轮
传动轴上,避免了打滑的可能。在栅盘的正下方安装槽型光耦(又称光断续器,
实际也是红外光电对管)。当发射的光线被栅齿挡住,接受端管子应该截止,但
该栅齿附近间隙仍有光透过并被接受到,所以截止的不够彻底;同理,本该完
全导通时也没有完全导通。所以接收端接受到的信号实际是连续变化的信号,
类似于正弦波,而不是理想的脉冲方波信号。需要在后级信号调理电路中,加
上放大级和比较级电路就可得到与TTL电平兼容的脉冲方波信号。
(乐山师范):
单个传感器检测电路
速度检测:
ST150为单光束直射取样式光电传感器,它由高输出的红外光电二极管与高灵敏度光敏晶体管组成
北京理工(第二届)(直射型光电传感器方案。)
由速度传感器可以获得一个脉
冲信号,该信号直接进入S12 芯片的ETC 模块,经程序计算后便可获得当前
车速,其电路原理图如上。
广工一队(第一届)
图红外发射驱动电路
图红外接收电路
红外发射管不是同时点亮,而是隔足够远的距离的两个发射管同时点亮。这样就可以把邻近干扰降到最底了。实际测量中使用长,直径为3mm的黑色套管套住红外接收管时,发射管发射的红外线对相隔一个管的红外接收的干扰几乎已经很小了。
第九届“飞思卡尔”杯全国大学生 智能汽车竞赛 技术报告 学校:武汉科技大学队 伍名称:首安二队参赛 队员:韦天 肖杨吴光星带队 教师:章政 0敏
I
关于技术报告和研究论文使用授权的说明 本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期:
II
目录 第一章引言 (1) 1.1 概述 (1) 1.2 内容分布 (1) 第二章系统总体设计 (2) 2.1 设计概述 (3) 2.2 控制芯片的选择 (3) 2.3 线性 CCD 检测的基本原理 (3) 2.3 系统结极 (5) 第三章机械系统设计 (7) 3.1 底盘加固 (7) 3.2 轮胎处理 (7) 3.3 四轮定位 (8) 3.4 差速器的调整 (12) 3.5 舵机的安装 (13) 3.6 保护杆的安装 (15) 3.7 CCD的安装 (16) 3.8 编码器的安装 (17) 3.9 检测起跑线光电管及加速度计陀螺仪的安装 (18) 第四章硬件系统设计 (19) 4.1 最小系统版 (20) 4.2 电源模块 (21) 4.3 CCD模块 (22) 4.4 驱动桥模块 (23) 4.5 车身姿态检测模块 (24) 4.7 测速模块 (24) 4.8 OLED液晶屏及按键、拨码 (25) 第5章程序设计 (27)
3.1.6驱动电机介绍 驱动电机采用直流伺服电机,我们在此选用的是RS-380SH型号的伺服电机,这是因为直流伺服电机具有优良的速度控制性能,它输出较大的转矩,直接拖动负载运行,同时它又受控制信号的直接控制进行转速调节。在很多方面有优越性,具体来说,它具有以下优点: (1)具有较大的转矩,以克服传动装置的摩擦转矩和负载转矩。 (2)调速范围宽,高精度,机械特性及调节特性线性好,且运行速度平稳。 (3)具有快速响应能力,可以适应复杂的速度变化。 (4)电机的负载特性硬,有较大的过载能力,确保运行速度不受负载冲击的 影响。 (5)可以长时间地处于停转状态而不会烧毁电机,一般电机不能长时间运行 于停转状态,电机长时间停转时,稳定温升不超过允许值时输出的最大堵转转矩称为连续堵转转矩,相应的电枢电流为连续堵转电流。 图3.1为该伺服电机的结构图。图3.2是此伺服电机的性能曲线。 图3.1 伺服电机的结构图
图3.2 伺服电机的性能曲线 3.1.7 舵机介绍 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如图3.3所示。图3.4为舵机的控制线。 图3.3 舵机控制要求
备战飞思卡尔智能车大赛.开始模块总结. 锁相环设置. 公式: PLLCLK=2*OSCCLK*(SYNR+1)/(REFDV+1), fbus=PLLCLK/2 void INIT_PLL(void) { CLKSEL &= 0x7f; //选用外部时钟.准备设置锁相环 PLLCTL &= 0x8F; //禁止锁相环 SYNR = 0xc9; //设置SYNR REFDV = 0x81; //设置REFDV PLLCTL |=0x70; //锁相环使能 asm NOP; asm NOP; //两个机器周期缓冲时间 while(!(CRGFLG&0x08)); //等待锁相环锁定 CLKSEL |= 0x80; //设置锁相环为时钟源 } 飞思卡尔XS128的PLL锁相环详细设置说明——关于如何提高总线工作频率PLL锁相环就相当于超频 单片机超频的原因和PC机是个一道理。分频的主要原因是外设需要的工作频率往往远低于CPU/MEMORY 这也和PC机南北桥的原理类似。总线频率设置过程 1、禁止总中断 2、寄存器CLKSEL(时钟选择寄存器)的第七位置0 即CLKSEL_PLLSEL=0。选择时钟源为外部晶振OSCCLK(外接晶振频率) 在PLL(锁相环)程序执行前 内部总线频率为OSCCLK/2 3. PLLCTL_PLLON=1 打开PLL 4.设置SYNR 时钟合成寄存器 、REFDV 时钟分频寄存器 、POSTDIV三个寄存器的参数 5、_asm(nop) _asm(nop);加入两条空指令 使锁相环稳定 6、while(!(CRGFLG_LOCK==1));//时钟校正同步 7、CLKSEL_PLLSEL=1; 下面详细说一下频率的计算一、时钟合成寄存器SYNR寄存器结构 VCOFRQ[1:0]控制压控振动器VCO的增益 默认值为00 VCO的频率与VCOFRQ[1:0]对应表
/*----------------------------------------------------------------------------------------------------------------------------- 桂林电子科技大学 物联网工程 Editor:JaceLin Date:2014.2.5 -------------------------------------------------------------------------------------------------------------------------------- 一、DMA特性 1)k60有16个DMA通道 二、寄存器 1)控制寄存器:DMA_CR 31-18 reserved 17 CX 取消转移,0正常操作,1取消剩下数据转移 16 ECX 错误取消转移,0正常操作,1取消转移 15-8 reserved 14 EMLM 使能副循环映射 0 禁止,TCDn.word2 为32位 1 使能,TCDn.word被重新定义 6 CLM 持续连接模式,0当副循环结束后,再次激活DMA要通过裁决,1不用裁决 5 HALT 停止DMA操作,0正常模式,1停止DMA操作 4 HOE 错误时停止,0正常操作,1当有错误时HALT=1,也就是DMA停止 3 reserved 2 ERCA 使能循环通道裁决, 1 EDBG 使能调试,写0,调试也用DMA,写1,调试时DMA不可用 0 reserved 2)错误状态寄存器DMA_ES 31 VLD 所有错误状态位逻辑或,0没有错误,1表示至少有1个错误没有清除 30-17 保留 16 ECX 转移被取消0没有被取消的转移,1最后一次记录是被取消的转移 15 保留 14 CPE 通道优先错误,0没有通道优先错误,1有 13-12 保留 11-8 ERRXHN 错误通道位/被取消的位(最多16位) 7 SAE 源地址错误,0没有源地址配置错误,1有错误 6 SOE 源偏移错误,0没有源偏移配置错误,1有偏移配置错误 5 DAE 目标地址错误,0没有错,1有错误 4 DOE 目标偏移错误,0没有错误,1有 3 NCE NBYTES/CITER配置错误,0没有,1有 2 SGE Scatter/Gather配置错误,0没有,1有 1 SBE 源总线错误,0没有错误,1有
智能车的制作中,看经验来说,舵机的控制是个关键.相比驱动电机的调速,舵机的控制对于智能车的整体速度来说要重要的多. PID算法是个经典的算法,一定要将舵机的PID调好,这样来说即使不进行驱动电机的调速(匀速),也能跑出一个很好的成绩. 机械方面: 从我们的测试上来看,舵机的力矩比较大,完全足以驱动前轮的转向.因此舵机的相应速度就成了关键.怎么增加舵机的响应速度呢?更改舵机的电路?不行,组委会不允许.一个非常有效的办法是更改舵机连接件的长度.我们来看看示意图: 从上图我们能看到,当舵机转动时,左右轮子就发生偏转.很明显,连接件长度增加,就会使舵机转动更小的转角而达到同样的效果.舵机的特点是转动一定的角度需要一定的时间.不如说(只是比喻,没有数据),舵机转动10度需要2ms,那么要使轮子转动同样的角度,增长连接件后就只需要转动5度,那么时间是1ms,就能反应更快了.据经验,这个舵机的连接件还有必要修改.大约增长0.5倍~2倍. 在今年中,有人使用了两个舵机分别控制两个轮子.想法很好.但今年不允许使用了.
接下来就是软件上面的问题了. 这里的软件问题不单单是软件上的问题,因为我们要牵涉到传感器的布局问题.其实,没有人说自己的传感器布局是最好的,但是肯定有最适合你的算法的.比如说,常规的传感器布局是如下图: 这里好像说到了传感器,我们只是略微的一提.上图只是个示意图,意思就是在中心的地方传感器比较的密集,在两边的地方传感器比较的稀疏.这样做是有好处的,大家看车辆在行驶到转弯处的情况: 相信看到这里,大家应该是一目了然了,在转弯的时候,车是偏离跑道的,所以两边比较稀疏还是比较科学的,关于这个,我们将在传感器中在仔细讨论。 在说到接下来的舵机的控制问题,方法比较的多,有人是根据传感器的状态,运用查表法差出舵机应该的转角,这个做法简单,而且具有较好的滤波"效果",能够将错误的传感器状态滤掉;还有人根据计算出来的传感器的中心点(比
关于Codewarrior 中的 .prm 文件 网上广泛流传的一篇文章讲述的是8位飞思卡尔单片机的内存映射,这几天,研究了一下Codewarrior 5.0 prm文件,基于16位单片机MC9S12XS128,一点心得,和大家分享。有什么错误请指正。 正文: 关于Codewarrior 中的.prm 文件 要讨论单片机的地址映射,就必须要接触.prm文件,本篇的讨论基于Codewarrior 5.0 编译器,单片机采用MC9S12XS128。 通过项目模板建立的新项目中都有一个名字为“project.prm”的文件,位于Project Settings->Linker Files文件夹下。一个标准的基于XS128的.prm文件起始内容如下: .prm文件范例: NAMES END SEGMENTS RAM = READ_WRITE DATA_NEAR 0x2000 TO 0x3FFF;
READ_ONLY DATA_NEAR IBCC_NEAR 0x4000 TO 0x7FFF; ROM_C000 = READ_ONLY DATA_NEAR IBCC_NEAR 0xC000 TO 0xFEFF; //OSVECTORS = READ_ONLY 0xFF10 TO 0xFFFF; EEPROM_00 = READ_ONLY DATA_FAR IBCC_FAR 0x000800 TO 0x000BFF; EEPROM_01 = READ_ONLY DATA_FAR IBCC_FAR 0x010800 TO 0x010BFF; EEPROM_02 = READ_ONLY DATA_FAR IBCC_FAR 0x020800 TO 0x020BFF; EEPROM_03 = READ_ONLY DATA_FAR IBCC_FAR 0x030800 TO 0x030BFF; EEPROM_04 = READ_ONLY DATA_FAR IBCC_FAR 0x040800 TO 0x040BFF; EEPROM_05 = READ_ONLY DATA_FAR IBCC_FAR 0x050800 TO 0x050BFF; EEPROM_06 = READ_ONLY DATA_FAR IBCC_FAR 0x060800 TO 0x060BFF; EEPROM_07 = READ_ONLY DATA_FAR IBCC_FAR 0x070800 TO 0x070BFF; PAGE_F8 = READ_ONLY DATA_FAR IBCC_FAR 0xF88000 TO 0xF8BFFF;
摘
要
飞思卡尔智能车大赛是面向全国大学生举办的应用型比赛, 旨在培养创新精 神、协作精神,提高工程实践能力的科技活动。大赛主要是要求小车自主循迹并 在最短时间内走完整个赛道。针对小车所安装传感器的不同,大赛分为光电组、 电磁组和摄像头组。 本文介绍了本院自动化系第一届大学生智能汽车竟赛的智能车系统。 包括总 体方案设计、机械结构设计、硬件电路设计、软件设计以及系统的调试与分析。 机械结构设计部分主要介绍了对车模的改进,以及舵机随动系统的机械结构。硬 件电路设计部分主要介绍了智能车系统的硬件电路设计, 包括原理图和 PCB 设计 智能车系统的软、 硬件结构及其开发流程。该智能车车模采用学校统一提供的飞 思卡尔车模,系统以 STM32F103C8T6 作为整个系统信息处理和控制命令的核心, 使用激光传感器检测道路信息使小车实现自主循迹的功能
关键字:飞思卡尔智能车STM32F103C8T6
激光传感器
第一章 概述
1.1 专业课程设计题目
基于嵌入式 STM32 的飞思卡尔智能车设计
1.2 专业课程设计的目的与内容
1.2.1 目的 让学生运用所学的计算机、传感器、电子电路、自动控制等知识,在老师的 指导下,结合飞思卡尔智能车的设计独立地开展自动化专业的综合设计与实验, 锻炼学生对实际问题的分析和解决能力,提高工程意识,为以后的毕业设计和今 后从事相关工作打下一定的基础。 1.2.2 内容 本次智能车大赛分为光电组和创新做,我们选择光电组小车完成循迹功能。 该智能车车模采用学校统一提供的飞思卡尔车模, 系统以 STM32F103C8T6 作为整 个系统信息处理和控制命令的核心,我们对系统进行了创造性的优化: 其一, 硬件上采用激光传感器的方案, 软件上采用 keil 开发环境进行调试、 算法、弯道预判。 其二,传感器可以随动跟线,提高了检测范围。 其三,独立设计了控制电路板,充分利用 STM32 单片机现有模块进行编程, 同时拨码开关、状态指示灯等方便了算法调试。
1.3 方案的研讨与制定
1.3.1传感器选择方案 方案一:选用红外管作为赛道信息采集传感器。 由于识别赛道主要是识别黑白两种不同的颜色, 而红外对管恰好就能实现区 分黑白的功能,当红外光照在白色KT板上时,由于赛道的漫反射作用,使得一部 分红外光能反射回来, 让接收管接的输出引脚的电压发生变化,通过采集这个电 压的变化情况来区分红外光点的位置情况,以达到区分赛道与底板的作用。 红外管的优点在于价格便宜,耐用;缺点却用很多:1、红外光线在自然环 境中,无论是室内还是室外均比较常见,就使得其抗干扰能力不强,容易受环境 变化的影响。2、调试不方面,由于红外光是不可见光,调试的时候需要采用比 较麻烦的方法来判断光电的位置。3、由于红外管光线的直线性不好,就使得红 外传感器所能准确的判断的最远距离比较小,也就是通常所说的前瞻不够远。
1 Chapter1 Device Overview MC9S12P-Family 1.1介绍 The MC9S12P 系列单片机是经过优化后有着低成本、高性能、低引脚数的汽车专业级单片机产品,该产品倾向于弥补高端16位单片及产品如MC9S12XS和低端8位单片机产品之间的空缺。MC9S12P 主要针对于要求使用CAN 或者LIN/J2602通讯接口的汽车应用产品,典型的应用案例包括车身控制器、乘坐人员检测、车门控制、座椅控制、遥控车门开关信号接收器、智能执行器、车灯模块、智能接线器。 The MC9S12P 系列单片机使用了很多MC9S12XS系列单片机相同的功能,包括片内闪存错误纠正代码(ECC)、一个专为数据诊断或者数据存储的单独的数据闪存模块、高速AD转换器和高频调制锁相环(IPLL)有效改善电磁兼容性能。MC9S12P系列单片机提供的所有16为单片机优点和微处理器效率,同时保持飞思卡尔用户熟悉的8位及16位单片机,低成本,功耗,EMC和高效的代码80针QFP、64针LQFP、40针QFN封装产品,最大限度的与MC9S12尺寸的优点,如同MC9S12XS一样可以无需等待外围设备和内存的状态既可以运行16为带款的寻址,MC9S12P系列单片机主要有XS引脚兼容. I/O口在各种模式下都可以使用,同时具有中断功能的I/O口还可以在停止或等待模式下唤醒。 1.2 芯片特性 表一:提供了MC9S12P家庭成员特征摘要, 1.P或D寄存器擦除或者编程需要最低总线频率为1MHZ
1.2.2 芯片功能 ? S12 CPU 内核 ? 高达128 KB具有ECC功能的片上闪存 ? 4 Kbyte带ECC功能的数据闪存 ? 高达6 Kb片上静态存储器(SRAM) ? 具有内部滤波器的锁相环倍频器(IPLL) ? 4–16 MHz 皮尔斯振荡器 ? 1 MHz内部RC振荡器 ? 定时器(TIM) 具有16位输入捕捉、输出比较、计数器脉冲累加器功能 ? 具有8位6通道的脉冲调制模块(PWM) ? 10通道12位分辨率的逐次逼近AD转换器 ? 1个串行通信外部接口(SPI) ? 1个支持局域网通讯串行通信(SCI) 模块 ?一个多可扩展控制器区域网络(MSCAN) 模块(支持CAN 协议2.0A/B) ?片上电压调节器(VREG) 可对内部供电及内部电压整流 ? 自主周期中断(API) 1.3 模块特征 1.3.1 CPU S12 CPU 是一个高速的16位处理单元: ?全16-bit数据通道提供有效的数学运算和高速的数学执行 ? 包含很多单字节指令,可以有效的利用ROM空间 ? 宽域变址寻址功能: —采用堆栈指针作为所有变址操作的变址寄存器 —除了在自增或自减模式下都可以利用程序计数器作为变址寄存器 —使用A\B\D累加器做累加器偏移 —自动变址,前递增(++a)、前递减(--a)、后递减(a--)、后递增(a++)(by –8 to +8) 1.3.2 带ECC功能的片内闪存 ? 高达128 Kb程序闪存空间 — 32 位数据加7 位ECC (纠错码) 允许单字节纠错和双字节纠错 — 512字节擦出扇区空间 —自动编程和擦除算法 —用户设置读写页面边界 —具有可以防止偶然编程或者擦除的保护结构 ? 4 Kb 数据闪存空间 — 16 位数据加6位纠错码允许单字节和双字节纠错功能 — 256 字节的擦出扇区空间 —自动编程和擦除算法 —用户设置读写页面边界 1.3.3 片内静态存储器
飞思卡尔MC9S12XS128技术手册(AD转换部分) 英文资料:飞思卡尔MC9S12XS256RMV1官方技术手册 1.1 XS12系列单片机的特点 XS12系列单片机特点如下: ·16位S12CPU —向上支持S12模糊指令集并去除了其中的MEM, WAV, WAVR, REV, REVW 五条指令; —模块映射地址机制(MMC); —背景调试模块(BDM); ·CRG时钟和复位发生器 —COP看门狗; —实时中断; ·标准定时器模块 —8个16位输入捕捉或输出比较通道;; —16位计数器,8位精密与分频功能; —1个16位脉冲累加器; ·周期中断定时器PIT —4具有独立溢出定时的定时器; —溢出定时可选范围在1到2^24总线时钟; —溢出中断和外部触发器; ·多达8个的8位或4个16位PWM通道 —每个通道的周期和占空比有程序决定; —输出方式可以选择左对齐或中心对其; —可编程时钟选择逻辑,且可选频率范围很宽; ·SPI通信模块 —可选择8位或16位数据宽度;
—全双工或半双工通信方式; —收发双向缓冲; —主机或从机模式; —可选择最高有效为先输出或者最低有效位先输出; ·两个SCI串行通信接口 —全双工或半双工模式 ·输入输出端口 —多达91个通用I/O引脚,根据封装方式,有些引脚未被引出; —两个单输入引脚; ·封装形式 —112引脚薄型四边引线扁平封装(LQFP); —80引脚扁平封装(QFP); —64引脚LQFP封装; ·工作条件 —全功率模式下单电源供电范围3.15V到5V; —CPU总线频率最大为40MHz —工作温度范围–40 C到125 C 第十章模拟—数字转换 10.1 介绍 ADC12B16C是一个16通道,12位,复用方式输入逐次逼近模拟—数字转换器。 ATD的精度由电器规格决定。 10.1.1 特点 ·可设置8位、10位、12位精度 ·在停止模式下,ATD转换使用内部时钟 ·转换序列结束后自动进入低耗电模式 ·可编程采样时间 ·转化结果可选择左对齐或右对齐
电机驱动电路 一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机 即可,当电机需要双向转动时,可以使用由4个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使 用继电器即可;但如果需要调速,可以使用三极管,场效应管等开 关元件实现PWM(脉冲宽度调制)调速。 2.性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。 要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动 (如果电路看不清楚请到相册里看) 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截止。2.栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管的栅极并利用场效应管本身的栅极电容(大约1000pF)进行延时,防止H桥上下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极管截止,场效应管导通。上面的三极管导通,场效应管截止,输出为高电平。当运放输出端为高电平(约为VCC-(1V至2V),不能完全达到VCC)时,下面的三极管导通,场效应管截止。上面的三极管截止,场效应管导通,输出为低电平。 上面的分析是静态的,下面讨论开关转换的动态过程:三极管导通电阻远小于2千欧,因此三极管由截止转换到导通时场效应管栅极电容上的电荷可以迅速释放,场效应管迅速截止。但是三极管由导通转换到截止时场效应管栅极通过2千欧电阻充电却需要一定的时间。相应的,场效应管由导通转换到截止的速度要比由截止转换到导通的速度快。假如两个三极管的开关动作是同时发生的,这个电路可以让上下两臂的场效应管先断后通,消除共态导通现象。
第五届飞思卡尔杯全国大学生 智能汽车竞赛 技 术 报 告 学校:华中科技大学 队伍名称:华中科技大学五队 参赛队员:方华启 张江汉 诸金良 带队教师:何顶新 罗惠
关于技术报告和研究论文使用授权的说明 本人完全了解第五届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期:
目录 第1章引言 (1) 1.1 概述 (1) 1.2 全文安排 (2) 第2章电路设计 (3) 2.1 电路系统框图 (3) 2.2 电源部分 (4) 2.3 电机驱动部分 (5) 2.4 电磁传感器 (6) 第3章机械设计 (8) 3.1 车体结构和主要参数及其调整 (8) 3.2 舵机的固定 (10) 3.3 传感器的固定 (11) 3.4 编码器的固定 (11) 第4章软件设计 (12) 4.1 程序整体框架 (12) 4.2 前台系统 (13) 4.3 后台系统 (13) 4.4 软件详细设计 (14) 第5章调试 (15) 第6章全文总结 (16) 6.1 智能车主要技术参数 (16) 6.2 不足与改进 (16) 6.3 致谢与总结 (17) I
参考文献 (18) 附录A 源代码 (18) II
第1章引言 第1章引言 教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全国大学生数学建模、电子设计、机械设计、结构设计等4大竞赛的基础上,委托教育部高等学校自动化专业教学指导分委员会主办每年一度的全国大学生智能汽车竞赛(教高司函[2005]201号文)[1]。 为响应教育部的号召,本校积极组队参加第五届“飞思卡尔”杯全国大学生智能汽车竞赛。从2009 年12 月开始着手进行准备,历时近8 个月,经过设计理念的不断进步,制作精度的不断提高,经历 2 代智能车硬件平台及相关算法的改进,最终设计出一套完整的智能车开发、调试平台。作为电磁组的华中科技大学五队采用轻质量机械设计、大前瞻传感器和连续化算法处理的基本技术路线,在前瞻距离、噪声抑制、驱动优化、整车布局等方面加强研究创新,在有限计算能力下获得了较高的赛道信息准确率。使智能车能够满足高速运行下的动力性和稳定性需求,获得了良好的综合性能和赛场表现。 本文将对智能车的总体设计和各部分的详细设计进行一一介绍。 1.1 概述 1.1.1 电路设计 飞思卡尔电磁组智能汽车硬件主要分为主控板,传感器板。本车在主控板上主要特色为电机使用H桥驱动,从性能和扩展性上优于集成驱动器方案。传感器板设计着重考虑提高传感器的前瞻量和信号的抗干扰能力。 1.1.2 机械设计 机械方面,主要是对舵机的安装进行了研究,加长了舵机的连杆,以增加反应速度。另外,主要研究车差速性能的研究以及传感器支架的固定。 1.1.3 控制程序设计 一方面使用免费的μCOS操作系统,这给智能车的整体调试提供了很多方便;另一方面,在大前瞻传感器的基础上设计出合理的舵机、电机控制算法,在满足稳定性要求的基础上提高速度。 1
附录I:寄存器地址列表 直接页面寄存器总结
高页面寄存器总结
非易失寄存器总结 注:直接页面寄存器表地址的低字节用粗体显示,直接寻址对其访问时,仅写地址低字节即可。第2列中寄存器名用粗体显示以区别右边的位名。有0的单元格表示未用到的位总是读为0,有破折号的单元格表示未用或者保留,对其读不定。
附录II 指令接与寻址方式 HCS08指令集概括 运算符 () = 括号种表示寄存器或存储器位置的内容 ← = 用……加载(读: “得到”) & = 布尔与 | = 布尔或 ⊕= 布尔异或 ×= 乘 ÷ = 除 : = 串联 + = 加 - = 求反(二进制补码) CPU registers A =>累加器 CCR =>条件代码寄存器 H =>索引寄存器,高8位 X => 索引寄存器,低8位 PC =>程序计数器 PCH =>程序计数器,高8位 PCL =>程序计数器,低8位 SP =>堆栈指针 存储器和寻址 M =>一个存储区位置或者绝对值数据,视寻址模式而定 M:M + 0x0001 => 两个连续存储位置的16位值.高8位位于M的地址,低8位位于更高的连续地址. 条件代码寄存器(CCR)位 V => 二进制补码溢出指示,第7位 H => 半进位,第4位 I => 中断屏蔽,第 3位 N => 求反指示器, 第2位 Z => 置零指示器, 第1位 C => 进/借, 第0位 (进位第 7位 ) CCR工作性符号 – => 位不受影响 0 = > 位强制为0 1 = > 位强制为1
= >根据运算结果设置或清除位 U = > 运算后没有定义 机器编码符号 dd =>一个直接寻址0x0000–0x00FF的低8位(高字节假设为0x00) ee => 16位偏移量的高8位 ff => 16位偏移量的低8位 ii => 立即数的一个字节 jj => 16位立即数值的高位字节 kk => 16位立即数值的低位字节 hh => 16位扩展寻址的高位字节 ll => 16位扩展寻址的低位字节 rr => 相对偏移量 n —任何表达范围在0–7之间的一个有符号数的标号或表达式 opr8i —任何一个表达8位立即值的标号或表达式 opr16 —任何一个表达16位立即值的标号或表达式 opr8a —任何一个表达一个8位值的标号或表达式.指令对待这个8位值为直接页面64K 字节地址空间(0x00xx)中地址的低8位. opr16a —任何一个表达16位值的标号或表达式.指令对待这个值为直接页面64K字节地址空间. oprx8 —任何一个表达8位无符号值的标号或表达式,用于索引寻址. oprx16 —任何一个16位值的标号或表达式.因为HCS08有一个16位地址总线,这可以为一个有符号或者无符号值. rel —任何指引在当前指令目标代码最后一个字节之后–128 to +127个字节之内的标号或表达式.汇编器会计算包括当前指令目标代码在内的8位有符号偏移量. 寻址方式 隐含寻址(Inherent)如CLRA,只有操作码,无操作数,需要操作的数据一般为CPU寄存器,因此不需要再去找操作数了。(INH) 立即寻址 (Immediate)如LDA #$0A,“$”表示16进制,此时操作数位于FLASH空间,与程序一起存放。(IMM) 直接寻址 (Direct)如 LDA $88,只能访问$0000-$00FF的存储器空间,指令短速度快; (DIR) 扩展寻址 (Extended)如果操作数地址超出了$00FF,自动为扩展寻址;(EXT) 相对寻址(Relative)如BRA LOOP,指令中一般给出8位有符号数表示的偏移量。(REL) 变址寻址 (Indexed) 采用[H:X]或SP作为指针的间接寻址方式。( IX )( IX1 )( IX2 ) 变址寻址 (Indexed) 1〉无偏移量:CLR ,X 简写(IX) 2〉无偏移量,指令完成后指针加1(H:X = H:X + 0x0001) ,简写(IX+)只用于指令MOV和CBEQ指令中;
第九届“飞思卡尔”杯全国大学生智能车竞赛光电组技术报告 学校:中北大学 伍名称:ARES 赛队员:贺彦兴 王志强 雷鸿 队教师:闫晓燕甄国涌
关于技术报告和研究论文使用授权的说明书本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期:2014-09-15日
摘要 本文介绍了第九届“飞思卡尔杯全国大学生智能车大赛光电组中北大学参赛队伍整个系统核心采用飞思卡尔单片机MC9S12XS128MAA ,利用TSL1401线性CCD 对赛道的行扫描采集信息来引导智能小车的前进方向。机械系统设计包括前轮定位、方向转角调整,重心设计器件布局设计等。硬件系统设计包括线性CCD传感器安装调整,电机驱动电路,电源管理等模块的设计。软件上以经典的PID算法为主,辅以小规Bang-Bang 算法来控制智能车的转向和速度。在智能车系统设计开发过程中使用Altium Designer设计制作pcb电路板,CodeWarriorIDE作为软件开发平台,Nokia5110屏用来显示各实时参数信息并利用蓝牙通信模块和串口模块辅 助调试。关键字:智能车摄像头控制器算法。
目录 1绪论 (1) 1.1 竞赛背景 (1) 1.2国内外智能车辆发展状况 (1) 1.3 智能车大赛简介 (2) 1.4 第九届比赛规则简介 (2) 2智能车系统设计总述 (2) 2.1机械系统概述 (3) 2.2硬件系统概述 (5) 2.3软件系统概述 (6) 3智能车机械系统设计 (7) 3.1智能车的整体结构 (7) 3.2前轮定位 (7) 3.3智能车后轮减速齿轮机构调整 (8) 3.4传感器的安装 (8) 4智能车硬件系统设计 (8) 4.1XS128芯片介绍 (8) 4.2传感器板设计 (8) 4.2.1电磁传感器方案选择 (8) 4.2.2电源管理模 (9) 4.2.3电机驱动模块 (10) 4.2.4编码器 (11) 5智能车软件系统设 (11) 5.1程序概述 (11) 5.2采集传感器信息及处理 (11) 5.3计算赛道信息 (13) 5.4转向控制策略 (17) 5.5速度控制策略 (19) 6总结 (19)
飞思卡尔推出业界最强大的汽车动力总成系统微 控制器 2011-10-14 18:05:18 来源:与非网 关键字:飞思卡尔Qorivva MCU 动力总成控制系统 2011年10月12日-德国巴登(2011汽车电子系统展览会)–汽车厂商继续通过新的汽车设计将业界标准提升至新高度,通过交付具有更高燃油经济性和更低排放的汽车满足消费者的期望和政府的法规要求。高性能微控制器(MCU)在环保汽车设计领域扮演着重要角色,飞思卡尔半导体(NYSE:FSL)日前宣布推出强大的多核心汽车MCU系列中的第一款产品,帮助汽车设计者更加轻松地提高引擎效率并降低排放污染。 飞思卡尔新推出的多核心Qorivva 32位MPC5676R MCU在Power Architecture?技术的基础上构建,与上一代单核心MPC5566 MCU相比,性能提高了四倍、内存空间提高了一倍、并提供了更多功能。MPC5676R的多种优势允许全球汽车厂商在单一控制器中融合多种尖端技术,例如直喷、涡轮增压和有线系统全驱动。 飞思卡尔负责汽车MCU业务副总裁Ray Cornyn表示,“飞思卡尔充分了解帮助汽车厂商生产更加环保、燃油效率更高的汽车所需的关键技术及其重要性,长期以来我们一直与汽车行业合作,共同开发可以满足其最新一代设计需求的解决方案。在动力总成领域,我们的目标是生产最强大、最灵活的MCU,它可以同时管理最新引擎的所有复杂控制任务,为设计者提供了降低系统复杂性所需的工具和软件平台。” 90纳米双核心MPC5676R MCU配备了: ? 6 MB片上闪存 ?384 KB片上RAM ?三个高性能增强型时序处理器单元(eTPU)
用了一年多飞思卡尔MC9S12XS128这款处理器,现在总结下各个功能模块的驱动. //锁相环时钟的初始化总线频率为40MHz(总线时钟为锁相环时钟的一半) //晶振为11.0592MHz void PLL_init(void) //PLLCLK=2*OSCCLK*(SYNR+1)/(REFDV+1) { //锁相环时钟= 2*11.0592*(39+1)/(10+1)=80MHz 总线时钟为40MHz REFDV=0x0A; SYNR=0x67; //0110_0111 低6位的值为19,高两位的值为推荐值 while(CRGFLG_LOCK != 1); CLKSEL_PLLSEL = 1; //选定锁相环时钟 //FCLKDIV=0x0F; //Flash Clock Divide Factor 16M/16=1M } //周期中断定时器的初始化- // //周期中断通道1用于脉冲累加器的定时采样,定时周期为: 10ms= (199+1)*(1999+1)/(40M) (没有使用) //周期中断通道0用于控制激光管的轮流发射,定时周期为: 2000us= (399+1)*(199+1)/(40M) //2011/4/4 15:24 定时时间改为1ms void PIT_init(void) { PITCFLMT_PITE = 0; // 禁止使用PIT模块 PITCFLMT :PIT 控制强制加载微计数器寄存器。 PITCE_PCE0 = 1; // 使能定时器通道0 //PITCE_PCE1 = 1; //使能定时器通道1 PITMUX = 0; //通道0,和通道1均选择8位微计数器0
本教程试图用最少的时间教你飞思卡尔XS128单片机的中断优先级设置方法和中断嵌套的使用,如果是新手请先学习中断的基本使用方法。 先来看看XS128 DataSheet 中介绍的相关知识,只翻译有用的: 七个中断优先级 每一个中断源都有一个可以设置的级别 高优先级中断的可以嵌套低优先级中断 复位后可屏蔽中断默认优先级为1 同一优先级的中断同时触发时,高地址(中断号较小)的中断先响应 注意:高地址中断只能优先响应,但不能嵌套同一优先级低地址的中断 下面直接进入正题,看看怎么设置中断优先级: XS128中包括预留的中断一共有128个中断位,如果为每个中断都分配一个优先级寄存器的话会非常浪费资源,因此飞思卡尔公司想出了这样一种办法:把128个中断分为16个组,每组8个中断。每次设置中断时,先把需要的组别告诉某个寄存器,再设置8个中断优先寄存器的某一个,这样只需9个寄存器即可完成中断的设置。 分组的规则是这样的:中断地址位7到位4相同的中断为一组,比如MC9SX128.h中 这些中断的位7到位3都为D,他们就被分成了一组。0~F正好16个组。
INT_CFADDR就是上面说到的用来设置组别的寄存器: 我们需要设置某个组别的中断时,只要写入最后8位地址就行了,比如设置SCI0的中断优先级,就写入0xD0。 设置好组别之后,我们就要该组中相应的中断进行设置,设置中断的寄存器为 这其实是一组寄存器,一共有8个,每个都代表中断组中的一个中断。对应规则是这样的:中断地址的低四位除以2 比如还是SCI0,低四位是6,除以二就是3,那么我们就需要设置INT_CFDATA3 往INT_CFDATAx中写入0~7就能设置相应的中断优先级了 拿我本次比赛的程序来举个例子:我们的程序中需要3个中断:PIT0,PORTH,SCI0。PIT0定时检测传感器数值,PORTH连接干簧管进行起跑线检测,SCI0接收上位机指令实现急停等功能。因此中断优先级要SCI0>PORTH>PIT0。 我们先要从头文件中找出相应中断的地址: PIT0【7:4】位为7,选择中断组: INT_CFADDR=0x70;
飞思卡尔智能车电机公司内部档案编码:[OPPTR-OPPT28-OPPTL98-OPPNN08]
3.1.6驱动电机介绍 驱动电机采用直流伺服电机,我们在此选用的是RS-380SH型号的伺服电机,这是因为直流伺服电机具有优良的速度控制性能,它输出较大的转矩,直接拖动负载运行,同时它又受控制信号的直接控制进行转速调节。在很多方面有优越性,具体来说,它具有以下优点: (1)具有较大的转矩,以克服传动装置的摩擦转矩和负载转矩。 (2)调速范围宽,高精度,机械特性及调节特性线性好,且运行速度平稳。 (3)具有快速响应能力,可以适应复杂的速度变化。 (4)电机的负载特性硬,有较大的过载能力,确保运行速度不受负载 冲击的影响。 (5)可以长时间地处于停转状态而不会烧毁电机,一般电机不能长时 间运行于停转状态,电机长时间停转时,稳定温升不超过允许值 时输出的最大堵转转矩称为连续堵转转矩,相应的电枢电流为连 续堵转电流。 图为该伺服电机的结构图。图是此伺服电机的性能曲线。
图伺服电机的结构图 图伺服电机的性能曲线 3.1.7 舵机介绍 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为 20ms,宽度为的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如图所示。图为舵机的控制线。
S12的输入/输入端口(I/O口) I/O端口功能 可设置为通用I/O口、驱动、内部上拉/下拉、中断输入等功能。 设置I/O口工作方式的寄存器有: DDR、IO、RDR、PE、IE和PS。 DDR:设定I/O口的数据方向。 IO :设定输出电平的高低。 RDR:选择I/O口的驱动能力。 PE:选择上拉/下拉。 IE:允许或禁止端口中断。 PS:1、中断允许位置位时,选择上升沿/下降沿触发中断;2、中断禁止时且PE有效时,用于选择上拉还是下拉。 I/O端口设置 1、A口、B口、E口寄存器 (1)数据方向寄存器DDRA、DDRB、DDRE DDRA、DDRB、DDRE均为8位寄存器,复位后其值均为0。 当DDRA=0、 DDRB=0、 DDRE=0 时A口、B口和E口均为输入口。 否则,A口、B口、E口为输出口。当DDRA、DDRB、DDRE的任何一位置1时,则该位对应的引脚被设置为输出。 例如,将A口设置为输出口,则其C语言程序的语句为:DDRA=0xff; (2)A口、B口、E口上拉控制寄存器PUCR PUCR为8位寄存器,复位后的值为0。当PUPAE、PUPBE、PUPEE被设置为1时,A口、B口、E口具有内部上拉功能;为0时,上拉无效。当A口、B 口、E口为地址/数据总线时,PUPAE和PUPBE无效。 (3)A口、B口、E口降功率驱动控制寄存器RDRIV RDRIV为8位寄存器,复位后的值为0,此时,A口、B口、E口驱动保持全功率;当RDPA、RDPB、RDPE为1时, A口、B口、E口输出引脚的驱动功率下降 (4)数据寄存器PORTA、PORTB、PORTE PORTA、PORTB、PORTE均为8位寄存器,复位后的值为0,端口引脚输出低电平;要使引脚输出高电平,相应端口对应位应该置1。 由于PE0是/XIRQ、PE1是IRQ,因此,PE0和PE1只能设置为输入。