
智能机器人创新实践进度报告
——自动寻线小车电路设计进度:
上图为使用Protel进行设计的自动寻线小车主电路原理图。该电路的主要部件为:STC89S52芯片,L298电机驱动芯。
STC89S52作为系统的CPU,P2.0——P2.4口负责接收红外对管传来的小车在跑道上的位置信息。P1.0——P1.3l输出控制电机的PWM波,通过这四个端口可实现小车的左转、右转及直线行使。
L298是电机的驱动芯片,IN1——IN4为控制信号输入端,与89S52的P1.0——P1.3相连。OUT1——OUT4则直接与电机连接。OUT1和OUT2一组,一起控制左边的电机。OUT3、OUT4一组,一起控制右边的电机。
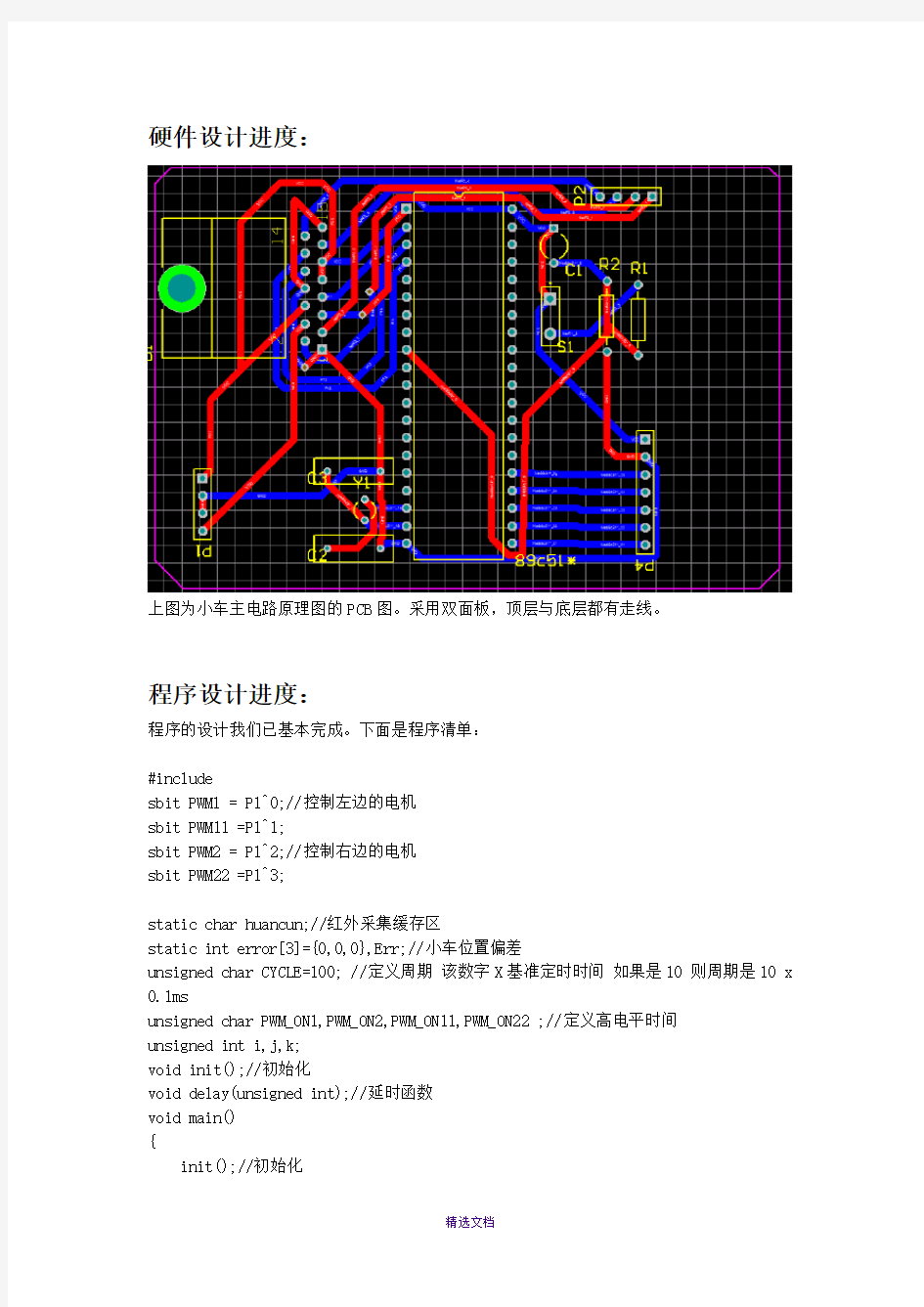
硬件设计进度:
上图为小车主电路原理图的PCB图。采用双面板,顶层与底层都有走线。
程序设计进度:
程序的设计我们已基本完成。下面是程序清单:
#include
sbit PWM1 = P1^0;//控制左边的电机
sbit PWM11 =P1^1;
sbit PWM2 = P1^2;//控制右边的电机
sbit PWM22 =P1^3;
static char huancun;//红外采集缓存区
static int error[3]={0,0,0},Err;//小车位置偏差
unsigned char CYCLE=100; //定义周期该数字X基准定时时间如果是10 则周期是10 x 0.1ms
unsigned char PWM_ON1,PWM_ON2,PWM_ON11,PWM_ON22 ;//定义高电平时间
unsigned int i,j,k;
void init();//初始化
void delay(unsigned int);//延时函数
void main()
{
init();//初始化
while(1)
{
if(Err>0)//小车左转
{
PWM_ON1 = 0;
PWM_ON11 =0.7*Err;//根据误差确定拐弯程度
PWM_ON2 =100;
PWM_ON22 = 0;
}
else if(Err<0)//小车右转
{
PWM_ON1 = 100;
PWM_ON11 =0;
PWM_ON2 =0;
PWM_ON22 =(0.7*Err);//根据误差确定拐弯程度}
else
{
PWM_ON1 = 100;
PWM_ON2 = 100;
}
}
}
void init ()
{
TMOD |=0x11;//定时器设置 1ms in 12M crystal
TH0=(65536-100)/256;
TL0=(65536-100)%256;//定时1mS
TH1=(65536-10000)/256;
TL1=(65536-10000)%256;//定时50mS
EA=1;
ET1=1; //打开中断
TR1=1;
ET0=1;
TR0=1;
}
/*********************************************/
/* 定时中断 0产生周期为10MS的PWM波 */
/*********************************************/
void time0(void) interrupt 1 using 2
{
static unsigned char count; //
TH0=(65536-100)/256;
TL0=(65536-100)%256;//定时0.1mS
if (count>=PWM_ON1)
{
PWM1 = 0;
}
if(count >=PWM_ON11)
{
PWM11 = 0;
}
if(count >=PWM_ON2)
{
PWM2=0;
}
if(count >=PWM_ON22)
{
PWM22 =0;
}
count++;
if(count >= CYCLE)
{
count=0;
if(PWM_ON1!=0) //如果左右时间是0 保持原来状态
PWM1 = 1;//
if(PWM_ON2!=0)
PWM2 = 1;
if(PWM_ON11!=0) //如果左右时间是0 保持原来状态
PWM11 = 1;//
if(PWM_ON22!=0)
PWM22 = 1;
}
}
/*信号的采样*/
void time1(void) interrupt 3 using 1
{
TH1=(65536-10000)/256;
TL1=(65536-10000)%256;//定时10mS
huancun=P2|0x80;//读取红外对管传来的数据
if((huancun & 0x7f)!=0x00)//排除干扰
{
{
error[2]=error[1];
error[1]=error[0];
if((huancun|0x80)!=0xff)//如果没有冲出跑道误差清0;
error[0]=0;
for(i=0;i<7;i++)//累积误差
{
if( (huancun&(0x01< { bquan++; error[0]+=(3-i)*(3-i)*(3-i); } } } Err=error[0]+1.2*(error[0]-error[2]); } } void delay(unsigned int n) { for (k=0;k<110;k++) for(j=0;j } 总进度报告表: (注:可编辑下载,若有不当之处,请指正,谢谢!) 湖东路四小科技创新大赛活动开展简介 在这科技发展日新月异的时代,只有从小对学生就进行科技创新教育,将来才能在激烈的竞争中占据主动位置。随着教育改革的不断深化,我校把科技创新工作放在突出的地位,进一步提高了对在少年儿童中开展科技活动的重要性的认识。尤其是近年来,随着素质教育和创新教育的逐步深入,我校不断加大科技教育领导力度,提高资金投入,强化科技教师队伍建设,锐意改革,努力创新,认真总结研究开展青少年科技教育活动的途径和方法,不断提高青少年科技教育工作的质量和水平,为推进素质教育,形成科技教育特色作出了新的贡献,科技教育成果显着,受到了教育局和市、区科协领导、学生家长的称赞和社会各界的认可。现将我校在参与过程中的一些做法简介如下: 一、加强组织领导: 我校一直重视对学生进行科技创新教育,学校每年开学都成立科技创新领导小组,教导处主任任组长,美术教师、科技教师具体负责日常活动开展情况。 二、认真组织科技创新兴趣小组活动: 我校以学校少年宫为载体,成立了科技创新制作小组(小牛顿实验室)和科技创新绘画小组(格列佛画室),开展科技创新活动的辅导工作。同学参与意识很强,活动效果很好,得到了校和家长的一致好评。同学们也表示通过参与小组活动,增强了大家的动手能力,思维也活了,学习成绩也有进步。 三、积极开展青少年科技创新活动: 学校每学期都制定相关活动计划,每学期开展科普周活动,组织学生科技创新绘画比赛。选出优秀作品加工辅导,为科技创新大赛做准备。 四、认真组织参与上级举行的科技创新比赛。 我校从2010年开始,每年都积极参与市、区教育局、科协组织的科技创新大赛,至今我校共有7幅科幻画作品在全国青少年科技创新大赛上获奖,多名同学获省市级奖项。2014年开始,我校开始组织学生向科技创新大赛新领域进军。多名同学参加了科技创新大赛创意项目的比赛并取的好成绩,一人获全国二等奖,两人获省级奖项。3名同学被马鞍山市政府授予青少年科技创新奖,高先玉老师连续被马鞍山市政府授予第4、5届青少年科技创新园丁奖。 今年我校有幸成为马鞍山市太空种子种植实验活动基地及全国青少年科学体验活动示范学校。这为我校科技创新实践活动的开展打开了新局面。展望未来,我校的科普教育工作任重道远,今后一段时期,我校科技教育将加大普及力度,提高活动质量,面向每一个学生,把科学精神、科学思想、科学方法、科学知识的教育贯穿于科普教育的全过程,重点培养学生的实践能力和创新精神。少年儿童科普教育工作,已得到社会各界和各层面的共同关心和支持,我们将站在时代的高度,全面规划科技教育的新思路,以学生发展为本,努力提高少年儿童的科学素质,造就新时代的创新人才,全面开创我校科技教育的新局面。 学生科技创新基金资助项目结题报告 项目名称:关于中小企业内部控制的探讨 项目编号: 102025 项目负责人:柯媛媛 项目负责人所在学院:会计学院 项目合同起止时间: 2010 年 4 月- 2011 年3 月 项目结题时间: 2011 年 3 月 重庆工商大学教务处制一、项目情况简表 注:附相关论文,成果实物及其证明材料等。 二、项目研究的背景、思路、研究与实践情况 背景:2010年4月26日,财政部会同证监会、审计署、国资委、银监会、保监会等部门在北京召开联合发布会,隆重发布了《企业内部控制配套指引》(下称“配套指引”)。该配套指引连同2008年5月发布的《企业内部控制基本规范》,共同构建了中国企业内部控 制规范体系,自2011年1月1日起首先在境内外同时上市的公司施行,自2012年1月1日起扩大到在上海证券交易所、深圳证券交易所主板上市的公司施行;在此基础上,择机在中小板和创业板上市公司施行。同时,鼓励非上市大中型企业提前施行。施行企业内部控制规范体系的企业,必须对本企业内部控制的有效性进行自我评价,披露年度自我评价报告,同时聘请会计师事务所对其财务报告内部控制的有效性进行审计,出具审计报告。由此初步形成了我国企业内部控制制度体系。同时我国中小企业在内部控制上海存在许多的问题,而内部控制逐渐向中小企业提出要求将是将来的一种必然趋势,所以经过本小组成员的讨论,决定在中小企业内部控制问题上实行研究,而这也具有相当大的实际意义。 思路:首先,经过小组成员的讨论,我们初步确立了以实际调查为主的思路,然后明确每位组员的分工,并每周集中,进行讨论(集中程度以实际情况变化为主)。其次,确立了一个大概的时间计划表,按照确立好的计划进行实际工作, 研究与实践:在整个项目的执行过程中,我们利用学校期刊网络资源与指导教师保持了良好的沟通,并汇报情况。同时,在老师及同学的帮助下,进入实业界调查,发现实际情况并非我们原来想象中的那么简单,也并不像书上说的那样,而比书上要复杂得多。同时我们也认识到问题的复杂程度,但是出于对科研项目的最终目的,服务于实际,我们还是于各种困难之中进行调查、学习。 机器人创新实验(1)报告 摘要 机器人作为20世纪人类最为伟大的发明之一,自60年代问世以来,经历40余年的发展已经取得长足的进步。近年来随着社会的进步和科学技术的迅猛发展,特别是在微电子技术、信息技术,计算机技术,材料技术等科学技术迅速的支持下,机器人的种类日益繁多,性能不断改进,工作领域也在不断地扩大。已经引起了各国科学家的普遍关注。许多发达国家均把机器人技术的开发,研究列入高新技术发展计划。并且已经取得了很大的进展,它的成果将成为各行各业提高生产力的强有力的工具。此机器人是针对目前交通事故频发设计的。利用三轮作为活动方式,通过三个传感器进行感应障碍识别,从而进行控制汽车的运动及时避免各种障碍物。从电影<<机械公敌>>里可以看到机器人的前景,以及注意机器人的弊端。 关键词: 机器人,工具,传感器,障碍物 一、实验目的 1、在保证整个稳定的前提下,将程序写入控制卡,熟悉 软件调试机器人运动步态的技巧,熟悉直流电机的控制,并实现提前设定好的动作步骤,并使机器人能够平稳的运动。 2、熟悉掌握各种搭建元件的使用方法和电机舵机的使用技巧 3、学会对学习知识的应用到实际中的能力,提高自身动手能力。 二.实验器材 探索者,电脑软件TKScop, 我们用到的探索者: 三.组员 项博、张君心、刘小龙 三、实验步骤 1.第一阶段:老师对我们介绍实验内容,对需要用到的配件、软件环境进行讲解,为使我们对实验内容更加熟悉,对软件环境的熟悉。 2.第二阶段:开始动手阶段,为了能使我们小组更好的完成创新实验课程,我们机器人模仿机器人案列制造了简单的机器人,其中有一些改动。 第二阶段成品展示 3.第三阶段:开始创新阶段,在第二阶一定经验的基础上,我们对其进行了创新和改组。其中包括前轮和驱动装置,还有传感器的数量,主要对机器小车的CPU 内部的程序进行了修改,让其实现了第二阶段没有实现的动作。 第三阶段成果 4.第四阶段:老师评价,总结成功与失败。 四、机械结构、控制接线方法、程序、程序流程图说明: 控制线接线方法: 1、2、3、4为传感器接口 5红外接收端口 6手柄ABC三通道的选择键 7程序写保护,on允许下载 反之不允许,如果要运行板载程序,则转换到非on 状态 8为程序下载接口,连接usb转串口线 9舵机接口,共六组。可接标准舵机和圆周舵机。舵机黑色线朝下,三针,最上针空余。10输出端口,共2组,可接LED灯和语音模块 学生科技创新实践活动研究成果报告 科技创新作品是学生应用学科知识解决生活、生产中的实际问题而形成的成果,是学生智慧和能力的体现。在生活中,应激发学生科技探索的兴趣,教师指导学生用智慧的大脑和灵巧的双手制作和改进作品,激发学生的创新能力,最终产出满意的科技创新成果。 教师把对科技感兴趣的学生组织起来成立科技创新小组,在教师指导下,一起研究、讨论,开展科技活动。培养发现问题的眼睛。生活、生产中存在各种效率低的繁重的体力劳作。人们都倾向于用便捷、高效的方法从繁重的劳动中解放出来。如周末用手清洗一家子的衣物,耗时耗力,常常使人腰酸腿痛。有人发明了洗衣机,从单缸到双缸,再到全自动(洗衣甩干一体),不断改进,解放了人工劳作。教师应该鼓励学生发现生活中的问题,从而解决问题。学会用所学知识去解决问题。学以致用,用所学知识解决实际问题。如:学习了液体传递压强、杠杆原理、滑轮等知识,人们设计制造出挖掘机、装载机、吊车等。应引导学生先模仿、再改进,最终实现创新。立足原创,自己制作,融合自己的创新元素。学生的科技创新作品一般植根于家庭生活和他们能接触到的生产设备。 教学过程中渗透。学生学习科学知识,教师引导学生发现知识在生活中的应用。如:电动机把电能转化为机械能, 家庭中哪些电器用到了电动机?电流具有热效应,电能转化为热能,那么生活中哪些用具应用了电流的热效应?这些都是需要引导学生去发现和探索的领域。提醒学生观看电视上的科技节目。央视科教频道(CCTV10)的“我爱发明”节目经常播放普通百姓发明的科技作品,学生收看后会对其有启发和激励作用。央视节目“是真的吗”,其中很多内容都与科技有关,多数问题当场就会得到实验验证,学生收看后受益匪浅,可能产生设计制作科技作品的灵感。央视科教频道(CCTV10)的“走进科学”节目介绍我国专业技术人员的研发成果,可以激励青少年了解科技,致力创新。网上远程指导。建立科技创新小组QQ群(或微信群),在QQ群里有教师答疑、解惑,指导学生开展科技作品制作。利用沟通工具使师生交流问题更快捷、方便,某位同学上传解决不了的问题,其他同学可以帮助解决,老师可以提出建议。开设“物理实验拓展”校本课程。开设“物理实验拓展”校本课程。在物理实验室,利用校本课时间,教师指导学生利用物理知识制作学具,巩固所学物理知识,提升学力,为科技创新奠定基础。如利用“在弹性限度内,弹簧的伸长量与所受拉力成正比”制作弹簧秤;利用“物体振动发声”制作笛子、二胡;利用“大气压的作用”制作活塞式抽水机;利用“浮沉条件”制作浮力秤、电动小船;利用“滑轮、电动机”知识制作升降式电梯、自动升降晾衣杆;利用“机械能转化为电能”制作 实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械学院机械设计制造系 年级/专业/班: 2010级机制3班 学生姓名: 学号: 实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心 一、设计题目 工业机器人设计及仿真分析 二、成员分工:(5分) 三、设计方案:(整个系统工作原理和设计)(20分) 1、功能分析 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 本次我们小组所设计的工业机器人主要用来完成以下任务: (1)、完成工业生产上主要焊接任务; (2)、能够在上产中完成油漆、染料等喷涂工作; (3)、完成加工工件的夹持、送料与转位任务; (5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品) 科技创新活动总结 组织师生参加科技创新大赛。我校为配合每年的全国创新大赛,每年先组织全校性的创新大赛,从中选拔优秀作品参加参加区级科技创新大赛,最后经过层层选拔,参加市级、省级创新大赛。由于自身实力不够,未能有作品入选全国创新大赛,但我校每年组织老师观摩,提升科技辅导老师的自身功力。 开展校园文化艺术节活动。每年的校园文化艺术节,有一个主题不变,那就是创新活动。或学生创新作品展示,或老师作品展示;有时我们围绕当年九月份的全国科技创新周活动主题开展活动;有时我们围绕三月份的全国气象日开展活动;有时围绕着如何预防地震开展活动;有时我们围绕着每年的世界环境日开展活动;有时开展“百名科普专家进校园讲科普活动” 如科大教授孙立广教授的《两极归来看两极》讲座;丰富的科技活动,极大地拓展了学生的知识视野,让我校学生享受美妙的精神大餐。 为更好灌输创新意识,校长积极动脑,布置了一道特殊的寒暑假作业。即每年的寒暑假创新“金点子”活动,至今已经举行两年,为创新意识的培养起了一个很好的厚积薄发的作用。学校将学生的“创新金点子”的部分作品装订成册,成了我校一道独特的创新之景。 营造创新教育氛围。为更好将创新意识根植学生心中,根植老师心中,还是校长运用其智慧想到将校园环境尽量布置成创新氛围,为此,将教室走廊上的伟人画换成了学生每年获奖的创新作品,行走在走廊上,印入眼帘的是创新作品,行走在走廊上,印入眼帘的是学生自己的作品,让学生产生冲动,让学生产生创新意识,我也要创新。这几年我校的创新作品虽然获奖层次不是很高,但参加人数却不断增加,这与我校不断营造创新氛围有着不可分割的关系。 成果收获。几年来,在科技创新方面,我校一路探索一路收获:学校先后成功地组织了“合肥之水”夏令营、“生态科技”夏令营、XX年科技夏令营、英国夏令营、日本夏令营,夏令营归来的日子里,科技兴趣组的同学们递交了生物类科技论文一百多篇,如《蚯蚓有眼睛吗?》、《跳舞草“跳舞”的秘密》、《沼虾的特别特征》、《蚂蚁》、《枯叶蝶》等等;在合肥市科技创新各届大赛中,陆云龙同学的旋转式牙膏,谢蒙辰、陈禾同学的科技论文《甲醛的绿色客星》、李衎同学的《人民币灭菌的新方法》、柴路同学 实践目的: 我们知道社实践作为高等院校实践教育的重要组成部分,目的在于弥补学校教育教学工作的不足,丰富和深化大学生思想政治教育的实践内容,促进青年学生在理论和实践相结合的过程中增长才干、健康成长的重要课堂,从而优质成才、全面成才。通过社会实践,可以引导我们了解社会,了解国情,从而坚持有中国特色社会主义道路的信念;增强责任感和使命感,树立正确的世界观、人生观、价值观,提高学生的综合素质;同时可以充分发挥我们的知识和智力优势,为人民群众生产和生活基本需求服务,培养学生的劳动观念和奉献精神;而且合理利用课余时间,积极投身于各类社会实践活动中,可以全面提高自身素质,为就业做好准备,最重要的是要提高我们科技创新的能力,因为创新可以说是一个企业或者说国家的灵魂。 经过我们班干的努力,我们班联系了珠海可口可饮料有限公司这样一个实习单位,珠海可口可乐饮料有限公司是由澳门饮料有限公司与珠海边控集团有限公司于1985年共同投资的大型中外合作企业,也是可口可乐在中国建立的首批装瓶厂之一 实践内容: 基于时间和条件的限制,我们班就定了在11月 8号那天进行为期一天的参观实习,我们的参观实习时间具体是当天的下午两点半到四点,其中的流程主要 有可口可乐的历史了解与学习、贵公司在各方面的发展历程、自动化车间的参观和最后的交流。 经过了差不多两个小时的车程,我们来到了实习单位——珠海可口可乐饮料有限公司,他们公司专门派了一个员工接待我们,接下来就是我们的参观实习了。可持续发展宣言: 首先,她给我们介绍了可口可乐中国的可持续发展宣言:“积极乐观,美好生活”,一个饮料公司怎么和“积极乐观,美好生活”联系在一起呢?这是我们的第一个疑惑,接下来她就为我们解开了疑惑,是因为他们公司把可持续发展理念融入与业务相关的七大领域,包括:多元化饮料选择、积极健康的生活方式、水资源管理、节能环保、可持续包装、公益关怀、为员工创造安全开放的工作环境,从而让人们都可以积极乐观,创造美好生活。觉得全社会都应该向他们公司学习这种发展宣言,毕竟现在整个地球都处于一个资源比较稀缺的状态。 模拟商店: 接下来在引导的带领,我们参观了公司的一个模拟商店,商店里面包含了他们公司的每一样产品,包括美汁源系列饮料、雪碧、芬达、醒目、雀巢系列饮料和冰露矿泉水,当然还有可口可乐,模拟商店是一个各种产品经过合理的摆放的 智能机器人实验报告1 学院:化学与材料科学学院 学号: 2015100749 姓名:朱巧妤 评阅人:评阅时间: 实验1 电驱动与控制实验 (一)实验目的 熟悉和掌握机器人开发环境使用,超声传感器、碰撞传感器、温度传感器、颜色传感器等常见机器人传感器工作原理与使用方法,熟悉机器人平台使用与搭建;设计一个简单的机器人,并采用多种程序设计方法使它能动起来。 (二)仪器工具及材料 计算机、机器人实验系统、机器人软件开发平台、编程下载器等设备。 (三)内容及程序 实验内容: (1)碰撞传感器原理与应用; (2)颜色传感器原理与应用; (3)测距传感器原理与应用; (4)温度传感器原理与应用; (5)熟悉开发环境使用与操作;设计一个简单轮式移动机器人,并使用图形化编程方式实现对机器人的控制,通过该设计掌握机器人开发平台的结构设计、程序设计等基本方法。 实验步骤: 1)首先确定本次要做的机器人为货架物品颜色辨别的机器人。 2)根据模型将梁、轴、插销、螺丝等零件拼装成一个货架台 3)将货架台安装上可识别颜色的摄像头,并装在控制器上方,将两个摄像头的连接线分 别插入控制器的传感器接口,将显示器连接线插入传感器接口。 4)拼装完成后将控制器连接电脑,在电脑上运用Innobot软件对机器人进行颜色识别动 作的编程,拖动颜色传感器模块,对应选择数码管接口以及两个摄像头的接口,使机器人能将货架台上物品的颜色反应到数码管上。 5)将所编程序进行上传。测试看机器人是否能将颜色反映到显示器上完成所编动作。 (四)结果及分析 使用梁和轴以及螺钉拼装出货架台。 将拼装好的货架台装到传感器上。 机电创新实践课程实践总结报告 班级:机械工程系机电15-1班 姓名:李振、陈再兴、董旭、 刘洋洋、刘博文 实践名称:慧鱼机器人创新组合与实践实践地点:实验1号楼203 实践时间:2018.10.30 指导教师:王仲文 哈尔滨理工大学荣成学院 完成时间:2018 年10 月31 日 目录 一、实践目的及内容 (3) 1.1 实践目的 (3) 1.2 实践内容 (3) 二、实践用设备及仪器 (3) 三、实践结果分析 (4) 3.1 烘手机模型 (4) 3.2 红绿灯模型 (5) 3.3 温度控制器模型 (7) 3.4 冲压机模型 (9) 四、团队分工介绍 (11) 五、个人收获与总结 (11) 一、实践目的及内容 1.1 实践目的 1. 掌握ROBOPRO接线板基本组成,能够依据实际需求搭建配套硬件。熟练使用ROBOPRO软件各类命令,能够依据需求完成软件编制,锻炼创新思维与创新设计能力。 2. 熟悉慧鱼机器人模型的各个模块,了解慧鱼机器人的基本结构。了解慧鱼机器人组件的功能,掌握慧鱼机器人组件的组合方法。 3. 能够利用慧鱼机器人的组件和控制模块进行机构创新组合,能够运用编程软件对慧鱼机器人进行运动控制。 1.2 实践内容 1. 对照ROBO接口板介绍手册,学习接口板构成以及数字量输入I1-I8、输出M1-M4或者O1-O8、模拟电压输入A1和A2、I/O扩展板用插槽等相关模块的作用以及使用方法。对照软件功能介绍模块,结合接口板实际测试“输入”、“输出”、“开始”、“结束”、“赋值”和“延时”等19个软件功能模块命令特点以及实现形式。 2. 自行设计完成一个控制程序,并用软件完成编辑,下载到对应的接口板中。 3. 学习并认识“慧鱼”创意模型使用手册中已搭建的示例模型,选取3种手册中的示例模型并进行搭建,研究并完成的ROBOPRO软件编程及机器人控制。进行创新设计,自我命题,并完成搭建、演示,讲解设计原理、运动原理以及规划用途等。 二、实践用设备及仪器 1. 实验设备及仪器 “慧鱼”创意模型组合包、“慧鱼”专用电源、个人计算机、“慧鱼”专用智能接口板和ROBOPRO软件。 2. 实验编程ROBOPRO软件简介 ROBOPRO软件是一种图形编程软件,简单易用,实时控制。用PLC控制器控制模型时,采用梯形图编程。编辑程序的其最大特点是使用系统提供的工具箱中的功能模块就可以建立控制程序(无须其它高级计算机语言的背景做支持),图标式的功能模块简单易懂。模型可用电脑、PLC或单片机对其进行控制。 3. 慧鱼机器人简介 慧鱼机器人是以德国慧鱼创意积木所组成的仿生模拟机器人为其基本架构,透过圈形式人机介面LLWin,经由智慧型微电脑介面板去驱动机器人,使机器人细部动作很容易达到我们需求,进而取代以往由硬体描述语言所驱动架构,不但操作简易,更可使我们了解机械运作的原理。 通过慧鱼模型的组装,程序的编制,任务的完成,阐述机械机构之间的配合关系,各种传感器的安装和使用,以及软件程序的编制思维,实现对伺服电机和电磁线圈的控制。 科技创新培训心得体会 2016年8月25日在三公司总部分别学习了关于企业科技创新与成果申报和专利申报等相关知识及洞室开挖、市政建设新工艺、工法的相关知识。通过两天的学习,使得我在这些方面的知识空白得到了很好的填补。 首先,通过对专利知识的学习使我了解到,对于我们葛洲坝三公司来说,专利挖掘、科技创新是增强市场竞争力的需要。随着三公司快速的发展,我们的业务领域已不再局限于传统的水利行业,而是向着公路、房建、市政等多行业发展。我们的市场也不断扩大,从之前的疆内市场延伸到国内大市场,而且在中亚等国际市场也有长足的发展。我们是一家技术型施工企业,专利系统的建设可以实现对我们企业技术,特别是核心技术起到保护作用。我们要增加专利的拥有量,提高企业的无形资产含量,增加和竞争对手谈判的筹码。同时,我们要建立一个全面、完善、有机、系统的专利保护体系,提高保护效力,发挥最大价值。对于我们的企业来说,由于目前还是一个依靠技术,而非依靠专利来盈利的公司,专利积累和管理工作处在从基础向更高迈进的阶段,因此,我们公司应采取以防御为主的专利申请策略。 专利的申请也是企业创新能力的体现,企业是经济体系中最基本的元素,作为科技创新主体,在我国实现经济增长方式转变过程中起着关键性作用。政府也强调,企业是自主创新的主体。这句话的真正含义是:企业是创新的需求端和完成端,即创新的需求源自企业,创新的完成和实现也在企业。所有的创新都是始于对实践和对现有知识 的深度认识与灵活应用。因此,企业创新更能脚踏实地,更好结合国家重大战略需求,创造具有实际价值的成果。当今世界,一个企业或一个行业的竞争,实质上是技术创新能力的竞争。而科技成果转化和技术转移是科学技术转化为生产力的主要方式,是科学技术与经济建设相结合的重要纽带。科技创新是企业生存的基本战略,无论是对一个国家,或是对一个企业,都是至关重要的,战略的落后或失败,会导致可怕的、难以设想的后果。 对于我们三公司当前生产中的薄弱环节和技术瓶颈以及出现的工程问题,作为企业或部门的技术负责人,首先要树立科技创新的观念,要善于归纳工程问题,积极凝练科学问题,在此基础上,集聚力量,集中资源,组织开展重点科技攻关,争取尽快取得一批科研成果,集成一批成熟技术模式,为促进企业快速、稳定发展提供强有力的科技支撑。实现关键技术攻关,需创建技术攻关组织,把技术攻关作为培养人才、选拔人才、发现人才的有效渠道,从而凝聚员工智慧和力量,促进企业创新发展。为此,企业管理则要做好四个的工作:注重组织体系创新,形成强有力的领导格局;注重内容和形式的创新,强化技术攻关队伍建设;注重激励机制创新,增强技术攻关的吸引力;企业、科研单位和高校联合攻关,加速成果转化,与此同时要善于提炼和总结生产中的科技成果,要用科技成果推动生产方式的变革和行业科技进步。 2016年8月26日学习了地下工程、市政施工新技术。一些概念在学之前比较模糊,通过这次的学习,有了比较清晰的认识。比如, 摘要:是对日常生活中、学习中或劳动时遇到的不方便、不顺手和不称心的事物,进行改进和创造性地设计制造的新产品。这类活动使学生手脑并用,而且容易激发学生的科学实践兴趣,开发学生的潜能,培养他们的实践能力和创造精神。 关键词:提出问题;自主创造;制作 一、提出科技创新问题 在科技教育活动过程中,学生是活动的主体。他们用课本上和通过其他途径学到的文化知识和科学技术,像科学家那样去探索和实验,获得创造知识。在科技创新活动中,在教师的辅导下,发现问题,查找资料,制订计划和亲身实践,在实验中积累数据,在研究中分析数据,直至撰写科技小论文或创造出有价值的科技作品。 每当学生完成一个研究课题,他们就经历了一个完整的科学研究过程,从而学会了一定的科学研究方法,在解决实际生活、学习和工作中的问题的过程中,提高了他们的思考能力。 在科技创新活动时,学生提出一些研究问题或研究方法,教师要给予肯定和积极引导。我校是农村学校,夏季学生家里苍蝇很多,胡婷玉同学在灭蝇时发现问题:用苍蝇拍虽能打死苍蝇,但会留下死苍蝇的内脏污点,很不卫生;如果用粘苍蝇纸,只等苍蝇“自投罗网”,不能主动出击,效果不佳。在教师的指导,从研究苍蝇拍开始,直至设计制作卫生灭蝇兜。 卫生灭蝇兜不但能灭停着不飞的苍蝇,而且还能逮住在空中乱飞的苍蝇;还会让苍蝇“自投罗网”。这个小发明获得嘉兴市第二十二届青少年科技创新大赛二等奖。 学校图书室是学生的第二课堂,学生借书后,借书证放在图书室内。当学生到图书室还书时,图书管理员要在一个班的借书证中,找到还书学生的借书证,不是件容易事。来还书借书的人多时,学生要排着长队等候。 为此,一对同胞姐妹郭婴、郭婴霞动起了脑筋,想了很多办法,经过反复尝试,动手实践,不断改进,每一次的改进,都向前跨了一步,终于设计制作出“寻找方便的借书证”。这个小发明获浙江省第二十三届青少年科技创新大赛一等奖。 二、探究科技自主创造 自主创造是素质教育的培养目标,是学生探究科技自主创新的重要途径。在科技教育实践中,要使学生发展个性,激发学生自身的创造,促进创造力的开发,就必须让学生自己主动大胆地去设计,突破原有的知识圈,打破常规,而产生新 一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。 一、机器人擂台赛 1、实训目的 机器人擂台赛的目的在于促进智能机器人技术(尤其是自主识别、自主决策技术)的普及。参赛队需要在规则范围内以各自组装或者自制的自主机器人互相搏击,并争取在比赛中获胜,以对抗性竞技的形式来推动相关机器人技术在大学生、青少年中的普及与发展。可以用自己设计的机器人来参加擂台赛,同时掌握这个环节所展现出来的机器人技术。 机器人擂台赛未来的发展目标是:比赛中,两个使用双腿自主行走的仿人形机器人互相搏击并将对方打倒或者打下擂台。? 2、实训要求 在指定的大小擂台上有双方机器人。?双方机器人模拟中国古代擂台搏击的规则,互相击打或者推挤。如果一方机器人整体离开擂台区域或者不能再继续行动,则另一方获胜。机器人大小要求长、宽、高分别不能超过30cm、30cm、40cm 。 比赛场地大小为长、宽分别为是 2400?mm的台,台上表面即为擂台场地。有黑色的胶布围成。?比赛开始后,?围栏内区域不得有任何障碍物或人。? 3、比赛规则分析? 我们需要吃透比赛规则,然后才能在比赛规则允许的范围内,尽量让我们的机器人具有 别人不具有的优势。对上述的比赛规则分析得到以下几个重点:? 3、1需要确保自己不掉下擂台 需要有传感器进行擂台边沿的检测,当发现机器人已经靠近边沿立刻转弯或者掉头。擂 台和地面存在比较大的高度差,我们通过测距传感器很容易发现这个高度落差,从而判断出 擂台的边沿。如图所示,在机器人上安装一个测距传感器,斜向下测量地面和机器人的 距离,机器人到达擂台边沿时,传感器的测量值会突然间变得很大。由于红外测距传感器使 用方便,并且“创意之星”控制器可以接入最多 8 个红外测距传感器,我们可以将它作为首选方案。? 擂台地面时有灰度变化的,我们可以在机器人腹部安装一些灰度传感器,来判读机器人 覆盖区域的灰度变化,从而判读机器人相对场地的方向。可以通过整体灰度值来判读机器人 的位置是不是靠近边沿,如果机器人靠近边沿就转弯后者后退。? 3、2需要及时的发现敌方 这里我们使用红外接近开关作为寻找敌方的方案并不算优秀,红外接近开关的有效测量范围是 20cm,20cm 之外的物体是察觉不到的。我们可以改成红外测距传感器,它的有效测量范围是 10‐80cm,比较适合我们当前的使用场合。? 3、3需要迅速的推动敌方,将敌方退下擂台 我们可以想象,两只斗牛相互推挤,赢的一定是力气比较大的一方。? 花蕊吐绿换新枝 2016年度科技创新活动总结 2016年在学校领导的指导和督办下,建始县中等职业技术学校科技创新活动以丰富校园文化生活,充分挖掘学生内在潜力,展示学生特长,提高学生综合能力,培养学生创新精神和实践能力,促进学生全面发展,做到科技创新与技能大赛相结合、与技能高考相结合、与专业学习相结合、与生活体验相结合为指导思想;以“节约、环保、创新、发展”为主题,要求学生本着节省资源、节约能源、保护环境的理念,主动发现、自主研究、自主创新的科技创新活动。整个活动分三个阶段历时7个月,收集了47件有效作品,评选出了4个一等奖,7个二等奖,15个三等奖。在本届活动中,得到了领导的高度重视,全校师生的大力支持和积极参与,为我校科技创新活动奠定了坚实的基础。现将本届活动情况总结如下: 一、明确思想,加强创新教育工作 学校成立文体科技活动室,把科技创新作为学校工作的重要组成部分,专门成立了科技创新领导小组,由何振丽副校长负责,由文体科技活动室牵头组织各班学生开展丰富多彩的科技创新活动。制定了科技创新活动计划,开展相应科技创新活动。注重发挥学校、社会、家庭三方面力量,并结合实际情况,因地制宜,因时制宜,综合推进学校的科技创新教育。 二、超前思维,追求时代教育思想 “创新是一个民族的灵魂,是一个国家兴旺发达的不竭动力。创新的关键在人才,人才的成长靠教育”。中职阶段,既是学生学习品质和道德品质的养成时期,又是基础知识的成厚积淀时期。教育教学质量是任何时候任何学校的生命线。我们提倡的质量不是时间加汗水的产物,而是科学的方法加科学的管理的质量。既看学生知识和技能的掌握与应用情况,又要看学生学习期间能力的发展情况,尤其是创新能力和实践能力。学校特别注重的个性张扬和特长的发展,提倡学生在动中学、用中学,积极参与社会实践活动,走进社会、了解社会;通过参加科技创新活动,培养自身的创新精神和实践能力,成为身心健康、素质高雅全面的中职生。学校举办了“科技活动周”。学校制定了实施方案,成立了组织机构,精心组织,认真培训,学生的科技热情高涨。这无疑是对教育负责、对学生发展负责,是体现新时期教育有力举措。 三、专题讲座引然科技文化氛围 学校领导充分认识到培养学生创新精神和创新意识的重要性。通过刘定海副校长《我爱发明我要发明我能发明》专题讲座,提高了师生对科技活动认识,激发了储存在师生心中的使命感和责任感。覃征老师的《科技创新实例及创新方向浅论》、李运芳老师的《科技创新小制作选题原则和捕获创科技创新中的美术作品新点的技巧》、魏未老师的《科技创新中的美术作品》、王溶老师的《科技论文的写作》等专题讲座,使师生近距离的感受到科技的魅力,教师对科技活动认 西安邮电大学 通信与信息工程学院 科技创新实验Ⅱ设计报告 专业班级: 信工1403班 学生姓名: 王泽森 学号(班内序号): 06 2015 年 5 月 25 日 ——————————————————————————装 订 线 ———————————————————————————————— 报告份数: 4 摘要: 这次报告主要介绍了绘制PCB,PLOTER的原理及方法,二极管,三极管,电容等常见元器件的使用方法及注意事项,还有面包板的使用方法的目的。通过老师的认真讲解及同学的积极讨论,我们基本掌握了各种基本元器件的使用方法。提高了同学们的动手实践能力培养了同学们的团队协作能力。 Abstract: This report mainly introduces the PCB, PLOTER principle and method of, diode, transistor, capacitors, and other common components to use and matters needing attention, and bread plate using the method of objective. Through the teacher's serious explanation and the students active discussion, we have mastered the basic components of the use of basic methods. Improve the students' hands-on ability to cultivate the students' teamwork skills 关键词 独立思考团结协作动手实践优秀教师 Keywords: Independent thinking Solidarity and cooperation Excellent teacher 引言:这份报告中的实验都是我们自己独立思考并且动手实践做完的,在听完老师的讲解后我们在实践中了解及掌握各种元器件的使用方法,有时会犯些错误,但是我们会牢记它们,最终完成实验。通过实验我们加深了对电路的认识在以后的学习生活中我们会更加熟练的使用它们。 课程设计报告书题目:智能机器人创新实践学院 专业 学生姓名 学生学号 指导教师 课程编号 课程学分 起始日期 2016.04-2016.06 目录 1 设计原理........................................................................................................错误!未定义书签。2方案论证........................................................................................................错误!未定义书签。 2.1 巡线模块设计......................................................................................错误!未定义书签。 2.2巡线模块设计......................................................................................错误!未定义书签。 3 设计方案........................................................................................................错误!未定义书签。 3.1小车的总体结构设计..........................................................................错误!未定义书签。 ............................................................................................................错误!未定义书签。 ............................................................................................................错误!未定义书签。 ............................................................................................................错误!未定义书签。 ............................................................................................................错误!未定义书签。 智能机器人创新实践进度报告 ——自动寻线小车电路设计进度: 上图为使用Protel进行设计的自动寻线小车主电路原理图。该电路的主要部件为:STC89S52芯片,L298电机驱动芯。 STC89S52作为系统的CPU,P2.0——P2.4口负责接收红外对管传来的小车在跑道上的位置信息。P1.0——P1.3l输出控制电机的PWM波,通过这四个端口可实现小车的左转、右转及直线行使。 L298是电机的驱动芯片,IN1——IN4为控制信号输入端,与89S52的P1.0——P1.3相连。OUT1——OUT4则直接与电机连接。OUT1和OUT2一组,一起控制左边的电机。OUT3、OUT4一组,一起控制右边的电机。 硬件设计进度: 上图为小车主电路原理图的PCB图。采用双面板,顶层与底层都有走线。 程序设计进度: 程序的设计我们已基本完成。下面是程序清单: #include 关于机器人实习报告 您需要登录后才可以回帖登录 | 注册发布 篇一:机器人实训报告 实训项目机器人模块组装实训报告 专业: 班级: 学号: 姓名: 指导老师: 机器人 1.简介: 机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。 现在,国际上对机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。”它能为人类带来许多方便之处! 2.来历: robot,原为robo,意为奴隶,即人类的仆人。作家罗伯特创造的词汇。 3.组成: 机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。 是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。 4.检测装置的作用: 是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。作为检测装置的传感器大致可以分为两类:一类是内部信息传感器,用于检测机器人各部分的内部状况,如各关节的位置、速度、加速度等,并将所测得的信息作为反馈信号送至控制器,形成闭环控制。一类是外部信息传感器,用于获取有关机器人的作业对象及外界环境等方面的信息,以使机器人的动作能适应外界情况的变化,使之达到更高层次的自动化,甚至使机器人具有某种“感觉”,向智能化发展,例如视觉、声觉等外部传感器给出工作对象、工作环境的有关信息,利用这些信息构成一个大的反馈回路,从而将大大提高机器人的工作精度。 5.控制系统有两种方式: 《全区青少年科技创新大赛和创客教育骨干科技 辅导员培训活动》心得体会 2018年10月14-16日,我与本校孙老师来到银川第六中学,参加2018年全区青少年科技创新大赛和创客教育骨干科技辅导员培训活动。本次培训学习旨在培养青少年的创新精神和实践能力,提高科技辅导员的科学素质和技能,推进科技教育事业的普及与发展。培训为期两天,分为周又红老师讲的《学生创新项目专题辅导》、《学生创新项目申报书编写》《实践活动项目专题辅导讲座》《实践活动项目申报书编写》,滕保华老师讲的《教师创新项目专题辅导》《教师创新项目申报书编写》,闪光耀老师的《科学DV的选题和制作》。 通过此次的培训学习,我感受到我们的每个学生的头脑都有一块未开垦的领地,需要用创新意识去点燃兴趣,点燃梦想,点燃智慧,点燃对科技的渴望与追求。只有这样才能把创新思想融入到平时的教育教学中,促进科技的发展。 周教授在讲座中重点讲述了全国青少年科技创新大赛的评审标准,评审标准为:“三自”、“三性”原则。 “三性”:科学性、先进性、实用性;“三自”:自己选题、自己设计、自己制作。 “三性”原则: (1)科学性:包括选题的科学技术意义;技术方案的合理性;发明与创新过程的科学性。 (2)先进性:包括新颖程度、先进程度、技术水平与难易程度。新颖程度指该项发明或创新技术在申报日以前没有同样的成果公开发表过,没有公开使用过;先进程度指该项发明或创新技术同以前已有的技术相比,有突出的实质性特点和显著的进步。 (3)实用性:指该项发明或创新技术可预见的社会效益、经济效益或效果,便于使用或投产。 “三自”原则: (1)自己选题:选题必须是作者本人发现、提出的。学校科技创新教育工作总结
科技创新基金项目结题报告
机器人创新设计实验报告
学生科技创新实践活动研究成果报告
最新西华大学机器人创新设计实验报告(工业机械手模拟仿真)
科技创新活动总结
最新改革创新社会实践报告
机器人实验报告
慧鱼机器人组合创新与实践总结报告
科技创新培训心得体会_学习总结_总结汇报_实用文档
科技创新实践活动小论文(最新)
机器人实验报告
机器人实训报告
科技创新总结
科技创新实验报告
机器人创新实践报告
智能机器人创新实践进度报告
关于机器人实习报告
科技创新大赛心得体会word.doc
相关主题
文本预览