平面电机
0引言
目前,实际应用中较为广泛的能够实现二维驱动及定位的方法有三种:一是压电陶瓷配合柔性铰链机构进行驱动,二是利用传统的旋转电机驱动,三是利用直线电机进行直接驱动。虽然这三种机构都可以实现二维平面定位,但是均存在着不同方面的缺陷。柔性铰链机构和压电陶瓷驱动元件所组成的系统易实现整体式结构、位移控制精度高、功耗小,但是柔性铰链的阻尼、小行程,以及压电陶瓷的迟滞、非线性等特性对工作台性能的提高会带来不利影响。由于丝杠加螺母等直线运动转换机构存在摩擦、侧隙、变形等一系列问题,并且转换机构的两套传动链引入了附加质量,使得传统的两组旋转电动机加直线转换机构定位装置的精度和响应速度很难达到较高的水平。直线电动机构成的平面定位装置虽然定位精度有了很大的提高,但是仍未摆脱“低维运动机构叠加成高维运动机构”模式,底层直线电机仍需要承担顶层直线电机以及相关机械连接件的质量。
为了使二维驱动装置能够实现更高精度的定位,需要研究利用电磁能直接产生平面运动的装置,即平面电机。与传统的定位工作台相比,平面电机的运动轨迹不是靠两个相互垂直的导轨运动方向上的合成而致,而是直接利用电磁能产生平面定位运动,具有出力密度高、低热耗、高精度等特点,另外由于摒弃了丝杠、螺杆等中间转换装置,故可以实现控制对象和平面电机的一体化,因而具有响应速度快,灵敏度高,随动性好以及体积小等优点。
1变磁阻型平面电机
根据电磁推力的产生原理,可将平面电机分为变磁阻型、感应型、永磁同步型和直流型四大类,其中变磁阻型又包含了步进式和开关磁阻式两种。
1.1步进式平面电机
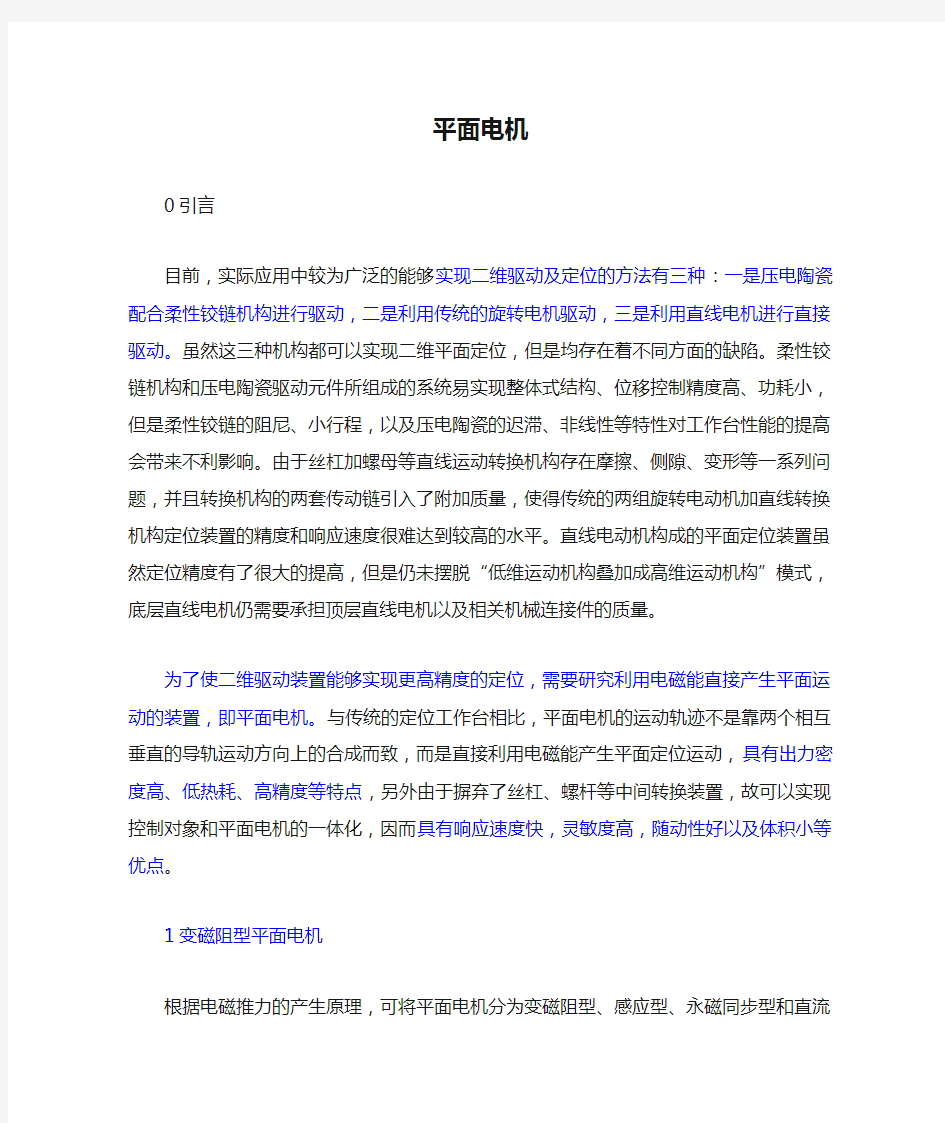
步进式平面电动机是研究最早、理论最为成熟的一类平面电机,也是目前仅有的形成产品的平面电机。在步进式平面电动机中,一般将一块永磁体和两组缠绕在铁心上的驱动线圈作为一个单元,由相互垂直的两个单元构成动子,而将开有均匀分布平行槽的叠片铁心作为定子,为动子提供闭合磁路。步进式平面电机的内部磁场由动子各相绕组的脉冲电流产生。当某一方向上的两组驱动线圈交替通入脉冲电流时,会分别对永磁体产生增磁或者去磁作用,根据磁阻最小原理,定子与动子之间将产生使磁路磁阻减小的磁拉力作用,从而驱动电动机产生步进运动,若同时考虑X、Y两方向上的作用力,即可实现电机动子在定子平面上的二维运动。典型的步进式平面电机的基本结构如图1所示。
图1 步进式平面电机结构图
步进式平面电动机的具有很多优点,例如位移量与输入脉冲数成正比,没有积累误差,具有良好跟随性,结构简单可靠,输出力较大,动态响应快,自起动能力强等,但是也存在
着较为明显的劣势,如存在低频振荡、失步和高频失步、运行速度和加速度低、自身噪声和振动较大等。该类平面电动机主要应用在平面绘图仪、晶片测量仪、快速加工系统、标图机等装置中。美国卡内基梅隆大学的R. L. Hollis等人根据Sawyer电机的原理与结构,设计出了一台将电源、驱动器和传感器都集成到动子上的平面电机,实现了动子的无连线和更高精度的闭环控制,如图2所示。
(a)动子底部结构(b)实物图
图2 R. L. Hollis提出的平面电机
1.2开关磁阻式平面电机
开关磁阻式平面电机在国内文献中出现频率较高,香港大学的潘剑飞等人在专利中提出了一种新型开关磁阻电机结构,如图2-3所示,太原理工大学的马春燕等人分别对该种平面电机的运行机理以及拓扑结构进行了阐述,并对电机进行了初步设计和仿真工作,华南理工大学的杨金明也对开关磁阻式平面电机的鲁棒控制进行了相应研究。
图3 开关磁阻式平面电机结构图
开关磁阻式平面电机主要由定子、动子、各部分支撑导向结构以及各方向位置检测装置等组成。如图3所示,多个定子块组成定子块方阵,而定子块则采用叠压硅钢片结构,并由环氧树脂胶连接而成,其中硅钢片的厚度与齿宽相同,定子硅钢片形状及拼接方式如图4所示。这种积木拼接式的定子结构取代了以往整体切割原材料的方式,这不仅使涡流的影响大大减小,而且会降低生产的复杂性和加工成本。
图4 定子叠片及定子块的组合方式
该平面电机的动子采用宽齿结构,整个动子平台上共安置六个动子单元,其中每三个动子单元为一组,负责X或Y方向的运动。动子铁心也是由硅钢片叠压而成,而且每个动子单元上均绕有集中励磁绕组。为了减小X与Y方向上的磁路耦合作用,将六个相同的动子单元按照“与相邻动子单元正交”的规律分别固定在动子台架上,动子叠片形状及单相线圈绕组结构如图5所示。
图5 动子叠片形状及单相线圈绕组
开关磁阻式平面电机的动子和定子均有铁磁材料构成,动子上安装集中绕组,而定子无需绕组,也不需要永磁体,因此,其结构简单、适应性强,适于高速和恶劣的应用环境。然而,该类平面电机存在较大的脉动推力与复杂的动态特性,使其建模和控制成为一个难题,限制了其在高精度和高速场合的应用,故虽然开关磁阻式平面电机具有加工简单、成本低等优点,但是如何解决其精确控制问题以及消除推力脉动和电磁耦合仍是一个待解决的问题。
2感应型平面电机
目前,国内外对感应型平面电动机的研究尚处于初级阶段,研究活动较少,且主要集中在日本。现有的感应型平面电机可以分成圆环式平面电机和双向组合式平面电机。
2.1圆环式感应型平面电机
日本九州大学的学者Nobuo Fujii在文献中提出一种新结构的圆环式感应型平面电机。该平面电机由绕有电枢绕组的环形初级铁心和一块次级导磁平板组成,这种环形绕组的优点是不用对线圈之间的空间关系做特殊的考虑,并且可以获得较大的电磁力。电机结构如图6所示。
图6 圆环式感应型平面电机
圆环式感应型平面电机的特点是既可以实现旋转运动,又可以实现直线运动。当进行旋转驱动时,其运行原理等同于轴向气隙式旋转感应电机,整个环形绕组内通入统一方向的三相电流,从而产生旋转行波磁场,驱动动子进行旋转,如图7(a)所示。当进行直线驱动时,通过与运动方向相同的边界间隔将电枢绕组分成两个部分,由电流控制逆变器在两组绕组中通入方向相反的电流,从而产生两个相对的磁场,由电枢圆周上的平衡关系,最终将合成初级铁心的直线运动,如图7(b)所示。
这种感应式平面电机的优点是可利用简单的次级平面实现较宽运动范围的平面驱动,适合于大负载平面驱动。其缺点是机电特性复杂,不能获得高气隙磁通密度,而且很难实现高速和高精度的平面驱动,另外,该种平面电机制造过程较为复杂。
(a)旋转驱动(b)直线驱动
图7 圆环式感应型平面电机的驱动原理
2.2双向组合式感应型平面电机
德国耶拿应用科学大学的Peter Dittrich等人在文献中提出一种三自由度感应型式平面电机,该平面电机的结构与Nobuo Fujii提出的结构有所不同,他采用了多组直线感应电机沿两正交轴组合的拓扑结构来实现平面驱动,其动子下表面的结构如图8所示。该感应型平面电机的动子集成了四个直线感应电机的初级铁心线圈,且在X和Y方向上各有两组线圈,通过独立控制,分别产生X和Y方向上的电磁推力。电机的定子为一块顶部覆盖有铜层的钢板,四个气浮轴承用来产生定子与动子之间的气隙,利用动子上的两个光学传感器来检测电机的实时位置,构成闭环控制系统。
图8 平面电机动子下表面结构
这种平面电机的优点是结构简单紧凑,没有磨损部件,由于次级基板较容易加工,故电机的运行范围可以扩展。其缺点是随着运动时间的积累,位置的不确定性增加,造成了其定位精度及可靠性受到限制。
另一种具有双向组合式拓扑结构的感应式平面电机由日本大学的Y.Ohira在1982年提出。两组三相绕组相互垂直地嵌入定子铁心中(上下两层),并且每组绕组独立地通过逆变器供电,因此,电机可以产生X向和Y向两个相互正交的行波磁场,实现动子二维运动,定子结构如图9所示。这种电机已经被提出者应用到工厂中的运输系统中。该感应式平面电机的优点是力的可控性较好,并且次级可以是很简单的无导线连接的钢板。
图9 感应型平面电机的初级铁心和绕组
3永磁型平面电机
永磁型平面电机的电磁推力是由永磁阵列产生的磁场与线圈阵列中的电流相互作用产生的。该类型平面电机的种类较多,也可以有很多不同的分类方法,这里按照不同形式的线圈结构,对永磁型平面电机进行分类总结。
3.1多相独立线圈结构
日本武藏大学的Daiki Ebihara等人在1989年提出一种动线圈式的平面电机,结构如图10所示。该平面电机的定子由N、S磁极按跳棋盘式的布置方式构成,动子为一个酚醛塑料载重平台,其上分布着8个铁心线圈,线圈之间磁路相对独立,并且这些铁心线圈被分成四组,分别为A、B、C或D相,图11为铁心线圈结构。
图10 Daiki Ebihara等人提出的平面电机
(a)三维图(b)侧视图
图11 铁心线圈结构
以A相绕组为基准,沿着X轴方向,B相绕与A相绕组相距τ/2的相差,其中τ为极距。同理,沿着Y轴方向,C相绕组与A相绕组相距τ/2的相差,而D相绕组在两个方向均与A相绕组相距τ/2的相差,绕组布置情况如图12所示。
图12 铁心绕组与磁极阵列分布关系
该平面电机的运行原理与永磁型直线步进电机相同。若使动子沿X向运动,可以通过分别激励A相与B相绕组(或C相与D相)来实现,若使动子沿Y向运动,可以通过分别激励A相与C相绕组(或B相与D相)来实现。因此,通过转换四相线圈之间的激励可以实现动子在X轴和Y轴上的二维平面运动。这种平面电机是提出时间较早的、仅用一个整体的动子结构就可实现二维驱动的永磁式平面电机,为之后平面电机的研究工作奠定了基础。但由于结构上的限制,使得其定位精度较低,而且其静态推力较小,并且有很大的推力
波动。
定子由螺线管阵列组成的平面电机拓扑结构是由日本东京都立大学的Hideaki Ohtsuka 和Junichi Tsuchiya等人在1994年提出的,如图13所示。这种平面电机的动子由四块永磁体、一块背铁板以及四个滚珠轴承构成,四块永磁体分别放置在正方形背铁板的四个顶角上。电机的定子由一系列等间距均匀分布的电磁铁和一块磁轭板构成,在动子与定子之间,安置了一块玻璃板用来调整气隙并提供动子运动平面。
图13 螺线管定子阵列平面电机
该平面电机的运行原理也类似于永磁直线步进电机。当永磁体与被激励的电磁铁处于正对的情况下,动子停止运动。图14为定子绕组流过激励电流瞬间,定子与动子之间的拉力情况,由受力方向可知,动子下一时刻将向左移动,并且直到与激励电流所在电磁铁相对时,才会达到稳定状态。若不断地给相应的电磁铁通电,则动子可以自由地在定子平面上移动。这种平面电机的动子同样摆脱了连接线的束缚,使得动子的运动范围理论上可以不受限制,并且通过控制励磁绕组的空间通电次序,还可以驱动其旋转一定角度。另外,通过改进定子螺线管的铁心结构和气隙长度,电机的性能可以得到优化。
图14 螺线管与永磁体受力图
韩国延世大学的学者Kwang Suk Jung和Yoon Su Baek在文献中提出了一种利用直流电驱动的平面电机结构,如图15所示。该电机的定子由相互正交且以阵列形式分布的多层直流线圈组成,与每个线圈相对应的永磁体放置在悬浮平板上。通过直流线圈阵列与永磁体在不同方向上的相互作用,即可实现动子的悬浮与二维驱动。
这种直流绕组平面电机由于仅仅采用了直流空心绕组与永磁体的组合结构,所以不存在交流损耗以及由于铁心磁饱和而带来的涡流损耗,与多相绕组驱动方法相比,该结构更有利于磁场相互作用的建模,另外,直流电的引入使系统的不确定因素减少,并且理论上对实现精确运动没有限制。
图15 永磁体阵列及直流绕组阵列
3.2正交电枢绕组结构
巴西南里奥格兰德大学的Aly F.Flores Filho等人在文献中提出一种定子为多相正交绕组,动子为钕铁硼永磁体结构的动磁式平面电机,如图16所示。电机的定子由电枢绕组和无槽电枢铁心组成,其中电枢由相互垂直的两组多相绕组以相互层叠的排列方式构成,两组多相绕组规则地缠绕在无槽铁心上,并且之间没有电气连接,X或Y方向上的多相绕组分别包含了12个相互独立的绕组。电机的动子由两块永磁体和一块导磁轭组成,永磁体的充磁方向与定子平面垂直,并且两块永磁体的充磁方向相反,导磁轭起到连接永磁体并且提供磁通回路的作用。另外,为了给动子提供一个规则的运动平面,一般在动子与定子之间放置一个1mm厚的丙烯酸树脂板。
图16 Aly F.Flores Filho等人提出的平面电机
这种平面电机是利用安培力来进行工作。以X轴为例,图17为动子受力示意图。当永磁体下方的绕组通入电流时,会受到与磁场和电流相垂直的安培力作用,力的大小和方向取决于电流值以及永磁体在气隙中建立的气隙磁密。同理,动子沿Y方向的运动由永磁体和Y相绕组相互作用产生。这样,当X方向与Y方向的绕组同时通电时,即可实现动子的二维运动。该平面电机将具有良好磁能特性的NdFeB永磁体的作为运动部件,实现了无连线动子,避免了动线圈式结构由于复杂引线而造成电机可靠性的下降。将电枢绕组放置在固定不动的基板上,有利于更好的进行散热。这种平面电机的缺点是受端部效应和法向力影响较大,因此,为了避免定子与动子之间的相互吸引,如何降低法向力成为关键。
图17 X方向受力示意图
清华大学的曹家勇等人在文献中提出了一种动子带有铁心结构的平面电机,与无铁心线
圈组成动子的平面电机相比较,该电机的特点是能够产生较大的连续推力,并且有较高的力密度,电机结构如图18所示。
图18 曹家勇等人提出的平面电机
这种平面电机同样包含了传统平面电机的主要组成部分,如定子、动子、永磁阵列、线圈等等,但是在动子铁心材料、动子铁心结构以及绕组形式等方面,有着一些特殊的设计。首先,动子铁心由铁材料制成并且在动子铁心的底部开有一些能够镶嵌绕组的槽。这种结构不仅减少了磁路的磁阻,而且允许气隙长度为一个很小的值,从而使电机能够产生一个恒定的推力。
(a)动子铁心及绕组结构(b)定子永磁阵列
图19 定子与动子结构
其次,X向绕组与Y向绕组沿着Z轴方向互相层叠在一起,而且分布在动子铁心的全部范围内,这样,绕组的相对范围利用密度可以达到100%。因为X向绕组与Y向绕组的配置方式与普通的三相绕组结构相同,所以绕组的形式和结构可以多种多样,例如单层、双层、整距及短距绕组,图19(a)中所示仅为双层整距绕组一种形式。另外,该平面电机采用的永磁阵列类似于Asakawa在专利中提到的阵列结构,但是对其做了改进,将原来的空隙部分用高导磁率的钢块代替,如图19(b)所示。
除了以上两种正交绕组结构平面电机,日本东京大学的Yasuhito Ueda和Hiroyuki Ohsaki 近年来又提出了一种新型平面电机,这平面电机特殊之处在于的定子是由印制电路板组成,如图20所示。作者设计这种电机的目的是制造出一种能够在平面内实现大范围运行和精确位置定位,且具有小型化定子的平面电机。这种电机的动子由无导线束缚的二维Halbach永磁阵列组成,其定子由两组正交分布的无铁心三相电枢导体组成,并且这两组导体分别布置在一个双层印制电路板的上下层,在两组电枢导体之间还有一层绝缘物质。
由于采用了印制电路板结构,故可以将电机做的比较薄,节省空间且提高了电气可靠性,另外,该电机可以实现X轴与Y轴的推力解耦控制,并且不用考虑动子的瞬时位置。与由几组直线电机在空间不同位置分布而得到的平面电机相比,这种正交绕组阵列和永磁阵列的结构形式可以实现动子在二维平面内的大范围运行。
图20 印制电路板式平面电机结构
与Yasuhito Ueda电机定子结构类似,韩国延世大学的Jong Hyun Choi等人也曾提出过一种定子采用印制电路板的平面电机,但是两种电机的整体结构形式不同,电机实物图如图21所示。该电机的定子由几块印制电路板组成,代替了传统意义上的铜绕组,三组铝架以及每组铝架上的四个电磁铁负责产生动子的悬浮力。三个圆形的钢板和一块带有Asakawa 型永磁阵列的方形板固定在一起,并作为平面电机的动子。定子提供悬浮动子的推进力,定子上的布线情况如图22所示。激光位移传感器和电容气隙传感器分别用于测量推进移动与悬浮移动的位移。由于采用了印制电路板的形式,因此定子会相当简单且尺寸很薄,这使得X与Y向之间的移动不存在相互影响,从而降低了平面控制的难度。
图21 印制电路板式平面电机实物图图22 印制电路板定子布线图
3.3四组线圈组合结构
加拿大多伦多大学的Robert Brydon Owen在他的硕士论文中提出了一种利用多台永磁同步直线电机进行组合而成的三自由度平面电机,该平面电机的结构示意图以及样机如图23、24所示。这种平面电机共集成了四台有铁心式永磁同步直线电机,每台直线电机可以产生两个方向的运动,即直线驱动和悬浮驱动,结构均由定子和动子组成,其中四个定子按照示意图所示的方式纵向固定在一个较重的固定框架中,并且横向开有沟槽用来缠绕单层的三相绕组。四台直线电机的动子都是由一组钕铁硼永磁体按一定顺序组合而成,放置在其对应定子绕组的下面并且均贴在同一块铝合金平板上。该平面电机系统使用了三个光学解码器,固定在直线导轨上,用来测量X、Y以及Z方向的位移。
图23 平面电机结构示意图图24 三自由度磁悬浮电机样机图
这种平面电机的缺点是缺少旋转方向的自由度,另外由于使用了直线导轨,从而引进了不必要的摩擦。针对于这些缺点,同样来自多伦多大学的Cameron Fulford对其结构进行了改进,可以实现五个自由度的位置控制,最终的指标为:运动范围100mm?100mm,悬浮方向13mm,旋转方向6?28mrad,定位精度10μm,旋转定位精度20μrad。
美国麻省理工学院的韩国学者Won-jong KIM在他的博士论文中也提出了一种利用四套永磁同步直线电机集成的平面电机结构方案,与Robert Brydon Owen平面电机有所不同的是,在Kim所提出的平面电机中,每套直线电机的定子采用无槽三相绕组,动子采用一维Halbach永磁阵列,而且动子悬浮于定子的上方,总体结构如图25所示。这个平台是世界上第一台能够提供六个自由度控制并且仅用一个单一的磁悬浮动子实现大范围(50mm×50mm)平面移动的磁悬浮平台。
图25 Kim平面电机总体结构图
这种平面电机利用纳米级分辨率的三台激光干涉仪和三个电容探测器来实时检测悬浮平台的位置,从而构成闭环控制系统。为了尽量减小推力波动,每台直线电机的定子采用了无槽结构,三相定子绕组均匀地缠绕在定子铁心上并且堆叠排开。为了获得更高的功率密度,直线电机的动子采用了Halbach永磁阵列,与传统的永磁阵列相比,这种永磁阵列所产生的
计,因此会有更快的动态响应、更高的机械可靠性以及更低廉的成本,并且由于悬浮系统没有使用导螺杆这样的中间功率传递设备,所以系统不存在间隙。另外,由于定子线圈与动子平台之间不存在摩擦力而且省去了机械支撑与传动部件,因此可以减小系统的附加损耗,使其定位精度大大提高。但是这种结构的平面电机有一个明显的缺点,就是动子的运动范围难以扩大,因为一旦动子的运动范围超出定子线圈时,其运动将不受控制。电机的实物图见图
26。
图26 Kim平面电机实物图
日本东北大学的学者Wei Gao等人在2003年又提出了另一种结构的平面电机,这种电机由四台无刷直流直线电机驱动,可以实现三自由度控制。特别地,它将角度编码装置集成到定子与动子之间,实现了平面电机的小型化,平面电机实物图如图27所示。
(a)动子结构(b)定子结构
图27 两相绕组平面电机实物图
如上图所示,该平面电机由定子基准台和动子平台组成。四台直线电机对称地分布在同一X-Y坐标系下,其中两台在X向上,另两台在Y向上。直线电机的永磁体和定子绕组分别安放在动子平台与定子基板上,每组永磁体包含了10块极距为10mm的Nd-Fe-B永磁体,每组定子绕组包含两个线圈,线圈之间的跨距为35mm,从而构成两相直线电机,另外,为了降低推力波动和电磁吸力,绕组铁心采用非磁性材料。可以通过驱动X或Y轴方向上的直线电机而使动子平台产生直线运动或偏旋转运动,该平面电机的行程为40mm 40mm。平面解码器由两个二维角度传感器和一个表面上带有二维正弦波形的角度网格所组成,这个角度网格固定在利用空气轴承悬浮起来的动子平台的下方,角度传感器和空气轴承喷嘴安装在定子基板上,从而动子平台的移动不会受到通电导线以及空气管道的影响。通过实验验证,该精密定位装置所能达到的分辨率为200nm。图28为该平面电机系统的电路原理图。
图28 平面电机系统的电路原理图
韩国首尔国立大学的学者Han-Sam Cho和Hyun-Kyo Jung根据线圈阵列与永磁阵列相互作用的平面驱动原理,提出了一种四组一维线圈阵列和一个二维永磁阵列所组成的动线圈式平面电机,其结构如图29所示。
图29 Cho提出的平面电机
这种平面电机采用二维永磁阵列作为定子,单轴驱动方法与三相永磁同步直线电机相同。其动子包含四组三相线圈、铁轭以及空气轴承的喷嘴。在X和Y方向上各有两组线圈,且两组线圈互相垂直。为了实现动子在两个方向上的运动,永磁阵列需要有这样的结构,即无论从X向或是Y向看,其布置方式相同,该平面电机采用如图30所示的永磁阵列,箭头表示永磁体的磁化方向(由S指向N)。通过实验验证,该类型永磁阵列具有优于其它永磁阵列的特性。这种平面电机的缺点是驱动动子沿X方向运行的线圈同时会产生沿Y方向的驱动力,这一点使得电机的控制变得较为复杂,并且使得线圈的宽度和长度较难确定。
图30 Cho平面电机所采用的永磁阵列
荷兰埃因霍温科技大学的John https://www.doczj.com/doc/7a1090829.html,pter提出过一种新结构的动线圈式平面驱动装置。该装置的线圈阵列与Kim平面电机的线圈阵列结构相似,都是四组直线电机的空间组合,所不同的地方是Compter提出的线圈阵列中每组线圈实际上包含了两组沿着线圈缠绕方向错开一定距离、并通入相同电流的线圈单元组成,通过选择合理的线圈几何形状,这种动子线圈结构可以有效地减少极距效应(pitch effect)的影响。该平面电机的定子采用二维Halbach 永磁阵列,最终实现指标为:精度:10μm,速度1m/s,加速度10m/s2。电机结构示意图如图2-30所示,动子绕组样机如图2-31所示。
图31 平面电机结构示意图图32 动子绕组样机结构
3.4二维线圈阵列结构
这种类型的平面电机多为动次级结构,典型结构如图33所示,其定子由线圈阵列组成,动子由永磁阵列组成,动子上无电气连接,与其它动磁式平面电机一样,该类电机的优点是不存在运动的电气连线妨碍其他零部件的布置或工作,系统可靠性得以提高。另外,电机工作过程中线圈阵列产生的热量也较易采取措施进行散去。
图33 二维线圈阵列与二维永磁阵列
荷兰埃因霍芬理工大学的J. W. Jansen 等人曾设计出一种动次级结构平面电机,该电机的定子由相互垂直的两组无铁心线圈以相互间隔的方式依次排列而成,其中两组线圈将分别产生X或Y方向(这里均是与线圈相垂直的方向)的驱动力并同时产生动子平台的悬浮力。动子采用二维的Halbach永磁阵列,永磁阵列方向与线圈的方向相对地成45度角,电机总体结构如图34所示。
图34 箭矢型线圈阵列平面电机结构图
图35显示了从线圈底部向上看时的绕组分布及受力情况,每一个线圈作为一相,单个线圈所产生的驱动力由线圈和永磁体的磁密分布的相对位置决定,因为没有铁心的存在,推力可以由洛伦兹力公式直接计算。在某一瞬间,动子平台会覆盖一定的驱动线圈,通过控制这些线圈中的电流大小以及通断情况,即可实现动子平台的位置控制。该种平面电机的样机如图36所示。
图2-35 箭矢型线圈阵列受力图图2-36 箭矢型线圈阵列平面电机实物图荷兰埃因霍芬理工大学的Jeroen de Boeij等人在文章中提出了一种定子为圆形(方形)线圈阵列的平面电机,如图37所示。该平面驱动器的最终尺寸参数为10×10二维Halbach 永磁阵列,40mm的极距,以及最大能够达到9×9的线圈阵列,保证在任何位置都能与永磁体阵列相互作用。
图2-37 圆形线圈阵列平面电机系统结构图
除此之外,针对运动范围受限的缺点,韩国学者Jeong-Woo Jeon等人对Won-jong KIM 提出的磁悬浮平台进行了结构上的改进,他们将原有的四组定子绕组进行二维拓展,形成线圈阵列,如图38所示,而动子则采用二维Halbah永磁阵列,这种结构实质上是二维线圈阵列与永磁阵列相互作用的一种平面电机,理论上它可以排除电机结构对运行范围的限制,从而有效地增大动子在平面上的运行区域,定子绕组阵列与二维Halbach动子阵列的对应关系如图39所示。经过实验验证,该电机将原有的50×50mm动子运行范围提高到300×300mm,定位精度小于等于100nm。
图38 Kim电机定子绕组的二维扩展图39 定子阵列与动子阵列对应关系
这种平面电机共包含了16个永磁同步直线电机,每个电机都可以同时产生水平方向推力与垂向悬浮力,从而能够驱动动子平台进行大范围六自由度运行。其缺点是机械结构复杂,定子布线繁冗,并且控制器设计较为复杂。
4平面电机的发展
Sawyer电机普遍被认为是第一台可以实现二维直接驱动的平面电机,它可以在整个空间中提供比较一致的性能和高速运行,但由于是开环控制,所以在外界干扰下,会存在失步、振荡,严重影响电机性能。近年来,平面电机的研究一直被各国学者所重视,美国、日本、韩国等国学者根据各类旋转电机的不同原理,先后研制出了十余种不同拓扑结构的平面电机,国外一些知名院校,如美国麻省理工学院、日本东北大学等也对平面电机进行了不同程度的研究工作,并且取得了一定的研究成果。
我国对平面电机的研究工作起步较晚,受到国内精密加工技术水平及设备落后的限制,平面电机整体研究水平不高,另一方面,作为IC产业的核心技术,受到技术封锁,从而进一步造成国内发展水平滞后于国外。但是,随着近几年我国对IC产业、精密加工技术以及
精密工件台的重视,越来越多的科研院校及学者投身于平面电机的研究工作,清华大学、西安交通大学、华南理工大学、香港大学、太原理工大学等均对平面电机进行了不同程度的研究,同时取得了一些突破。可以预计,在未来十几年的时间里,随着平面直接驱动技术的不断完善,平面电机的种类会不断增多、性能会不断完善,逐渐向着高精度、大行程的趋势进步并最终满足现代加工设备对平面电机的强大需求,成为精密、高精密加工设备的重要驱动形式。
同步电动机的起动 1.同步电机的基本原理 同步发电机和其它类型的旋转电机一样,由固定的定子和可旋转的转子两大部分组成。一般分为转场式同步电机和转枢式同步电机。 图1.1给出了最常用的转场式同步发电机的结构模型,其定子铁心的内圆均匀分布着定子槽,槽内嵌放着按一定规律排列的三相对称交流绕组。这种同步电机的定子又称为电枢,定子铁心和绕组又称为电枢铁心和电枢绕组。 转子铁心上装有制成一定形状的成对磁极,磁极上绕有励磁绕组,通以直流电流时,将会在电机的气隙中形成极性相间的分布磁场,称为励磁磁场(也称主磁场、转子磁场) 气隙处于电枢内圆和转子磁极之间,气隙层的厚度和形状对电机内部磁场的分布和同步电机的性能有重大影响。 除了转场式同步电机外,还有转枢式同步电机,其磁极安装于定子上,而交流绕组分布于转子表面的槽内,这种同步电机的转子充当了电枢。图中用AX、BY、CZ三个在空间错开120 分布的线圈代表三相对称交流绕组。 图1.1同步电机结构模型 1.1工作原理 主磁场的建立:励磁绕组通以直流励磁电流,建立极性相间的励磁磁场,即建立起主
磁场。 载流导体:三相对称的电枢绕组充当功率绕组,成为感应电势或者感应电流的载体。 切割运动:原动机拖动转子旋转(给电机输入机械能),极性相间的励磁磁场随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场)。 交变电势的产生:由于电枢绕组与主磁场之间的相对切割运动,电枢绕组中将会感应出大小和方向按周期性变化的三相对称交变电势。通过引出线,即可提供交流电源。 感应电势有效值:每相感应电势的有效值为E0 =4.44fNψ Φ 感应电势频率:感应电势的频率决定于同步电机的转速n和极对数p ,即 f=pn/60 交变性与对称性:由于旋转磁场极性相间,使得感应电势的极性交变;由于电枢绕组的对称性,保证了感应电势的三相对称性。 1.2同步转速 同步转速从供电品质考虑,由众多同步发电机并联构成的交流电网的频率应该是一个不变的值,这就要求发电机的频率应该和电网的频率一致。我国电网的频率为50Hz ,故有: n=60f/p=3000/p 要使得发电机供给电网50Hz的工频电能,发电机的转速必须为某些固定值,这些固定值称为同步转速。例如2极电机的同步转速为3000r/min,4极电机的同步转速为1500r/min,依次类推。只有运行于同步转速,同步电机才能正常运行,这也是同步电机名称的由来。 1.3运行方式 同步电机的主要运行方式有三种,即作为发电机、电动机和补偿机运行。作为发电机运行是同步电机最主要的运行方式,作为电动机运行是同步电机的另一种重要的运行方式。同步电动机的功率因数可以调节,在不要求调速的场合,应用大型同步电动机可以提高运行效率。近年来,小型同步电动机在变频调速系统中开始得到较多地应用。同步电机还可以接于电网作为同步补偿机。这时电机不带任何机械负载,靠调节转子中的励磁电流向电网发出所需的感性或者容性无功功率,以达到改善电网功率因数或者调节电网电压的目的。 分析表明,同步电机运行于哪一种状态,主要取决于定子合成磁场与转子主极磁场之间的夹角δ,δ称为功率角。
多电机速度同步控制 在传统的传动系统中,要保证多个执行元件间速度的一定关系,其中包括保证其间的速度同步或具有一定的速比,常采用机械传动刚性联接装置来实现。但有时若多个执行元件间的机械传动装置较大,执行元件间的距离较远时,就只得考虑采用独立控制的非刚性联接传动方法。下面以两个例子分别介绍利用PLC和变频器实现两个电机间速度同步和保持速度间一定速比的控制方法。 薄膜吹塑及印刷机组的主要功能是,利用挤出吹塑的方法进行塑料薄膜的加工,然后经过凹版印刷机实现对薄膜的印刷,印刷工艺根据要求不同可以采用单面单色、单面多色、双面单色或双面多色等方法。在整个机组中,有多个电机的速度需要进行控制,如挤出主驱动电机、薄膜拉伸牵引电机、印刷电机以及成品卷绕电机等。电机间的速度有一定的关系,如:挤出主电机的速度由生产量要求确定,但该速度确定之后,根据薄膜厚度,相应的牵引速度也就确定,因此挤出速度和牵引速度之间有一确定的关系;同时,多组印刷胶辘必须保证同步,印刷电机和牵引电机速度也必须保持同步,否则,将影响薄膜的质量、印刷效果以及生产的连续性;卷绕电机的速度受印刷速度的限制,作相应变化,以保证经过印刷的薄膜能以恒定的张力进行卷绕。 在上述机组的传动系统中,多组印刷胶辘的同步驱动可利用刚性的机械轴联接,整个印刷胶辘的驱动由一台电机驱动,这样就保证了它们之间的同步。印刷电机的速度必须保证与牵引电机的速度同步,否则,在此两道工艺之间薄膜会出现过紧或过松的现象,影响印刷质量和生产的连续性。但是印刷生置与牵引装置相距甚远,无法采用机械刚性联接的方法。为实现牵引与印刷间的同步控制,牵引电机和印刷电机各采用变频器进行调速,再用PLC对两台变频器直接控制。 牵引电机和印刷电机采用变频调速,其控制框图如图1所示。在这个闭环控制中,以牵引辘的速度为目标,由印刷电机变频器调节印刷辘速度来跟踪牵引辘的速度。利用旋转编码器1和旋转编码器2分别采集上述两个电机的脉冲信号(编码器位置参见图3),并送到PLC的高速计数口或接在CPU的IR00000~IR00003。以这两个速度信号数据为输入量,进行比例积分(PI)控制算法,运算结果作为输出信号送PLC的模拟量模块,以控制印刷电机的变频器。这样,就可以保证印刷速度跟踪牵引速度的变化而发生变化,使两个速度保持同步。
第一篇 直流电机 一. 直流电机(DC Machines)概述 直流电机是电机的主要类型之一。直流电机可作为发电机使用,也可作为电动机使用。 用作发电机可以获得直流电源,用作电动机,由于其具有良好的调速性能,在许多调速性能要求较高的场合,得到广泛使用。 直流电机的用途:作电源用:发电机;作动力用:电动机;信号的传递:测速发电机,伺服电机 作电源用:直流发电机将机械能转化为直 流电能 作动力用:直流电动机将直流电能转化为机械能 信号传递:直流测速发电机将机械信号转 换为电信号 信号传递-直流伺服电动机将控制电信号转换为机 械信号 二. 直流电机的优缺点 1.直流发电机的电势波形较好,受电磁干扰的影响小。 2.直流电动机的调速范围宽广,调速特性平滑。 3.直流电动机过载能力较强,起动和制动转矩较大。 4.由于存在换向器,其制造复杂,成本较高。 第1章 直流电机的工作原理和结构
1-1 直流电机工作原理 一、原理图(物理模型图) 磁极对N、S不动, 线圈(绕组)abcd 旋转, 换向片1、2旋转, 电刷及出线A、B不动 二、直流发电机原理(机械能--->直流电能)( Principles of DC Generator) 1.原动机拖动电枢以转速n(r/min)旋转; 2.电机内部有磁场存在;或定子(不动部件)上的励磁绕组通过直流电流(称为励磁电流 I f)时产生恒定磁场(励磁磁场,主磁场) (magnetic field, field pole) 3.电枢线圈的导体中将产生感应电势 e = B l v ,但导体电势为交流电,而经过换向器 与电刷的作用可以引出直流电势E AB,以便输出直流电能。(看原理图1,看原理图2) (commutator and brush)
电机学知识点讲义汇总 第一章 基本电磁定律和磁路 电机的基本工作原理是建立在电磁感应定律、全电流定律、电路定律、磁路定律和电磁力定律等定律的基础上的,掌握这些基本定律,是研究电机基本理论的基础。 ▲ 全电流定律 全电流定律 ∑? = I Hdl l 式中,当电流方向与积分路径方向符合右手螺旋关系时,电流取正号。 在电机和变压器的磁路计算中,上式可简化为 ∑∑=Ni Hl ▲电磁感应定律 ①电磁感应定律 e=- dt d N dt d Φ -=ψ 式中,感应电动势方向与磁通方向应符合右手螺旋关系。 ②变压器电动势 磁场与导体间无相对运动,由于磁通的变化而感应的电势称为变压器电动势。电机中的磁通Φ通常是随时间按正弦规律变化的,线圈中感应电动势的有效值为 m fN E φ44.4= ③运动电动势 e=Blv ④自感电动势 dt di L e L -= ⑤互感电动势 e M1=-dt di 2 e M2 =-dt di 1 ▲电磁力定律 f=Bli ▲磁路基本定律 ① 磁路欧姆定律 Φ= A l Ni μ=m R F =Λm F 式中,F=Ni ——磁动势,单位为A ; R m = A l μ——磁阻,单位为H -1; Λm = l A R m μ=1——磁导,单位为H 。
② 磁路的基尔霍夫第一定律 0=?s Bds 上式表明,穿入(或穿出)任一封闭面的磁通等于零。 ③ 磁路的基尔霍夫第二定律 ∑∑∑==m R Hl F φ 上式表明,在磁路中,沿任何闭合磁路,磁动势的代数和等于次压降的代数和。 磁路和电路的比较 第二章 直流电动机 一、直流电机的磁路、电枢绕组和电枢反应 ▲磁场是电机中机电能量转换的媒介。穿过气隙而同时与定、转子绕组交链的磁通为主磁通;仅交链一侧绕组的磁通为漏磁通。直流电机空载时的气隙磁场是由励磁磁动势建立的。空载时,主磁通Φ0与励磁磁动势F 0的关系曲线Φ0=f (F 0)为电机的磁化曲线。从磁化曲线可以看出电机的饱和程度,饱和程度对电机的性能有很大的影响。 ▲ 电机的磁化曲线仅和电机的几何尺寸及所用的材料有关,而与电机的励磁方式无关。电 机的运行特性与磁化曲线密切相关。设计电机时,一般使额定工作点位于磁化曲线开始弯曲的部分,这样既可保证一定的可调节度,又不至于浪费材料。 ▲ 直流电机电枢绕组各元件间通过换向器连接,构成一个闭合回路,回路内各元件的电动 势互相抵消,从而不产生环流。元件内的电动势和电流均为交变量,通过换向器和电刷间的相对运动实现交直流转换。电刷的放置原则是:空载时正、负电刷之间获得最大的电动势,这时被电刷短路的元件的电动势为零。因此,电刷应放在换向器的几何中性线上。对端接对称的元件,换向器的几何中性线应与主极轴线重合。 ▲ 不同型式的电枢绕组均有①S=K=Z ;②y 1=Z i /2p ε=整数;③y=y 1+y 2。其中,S 为元 件数,K 为换向片数,Z i 为虚槽数,p 为极对数,y 1为第一节距,y 2为第二节距,y 为合成节距,ε为小于1的分数,用来把y 1凑成整数。对单叠绕组,y=±1,y 2小于0,并联支路对数a=p ,即每极下元件串联构成一条支路。对单波绕组,y 2大于零,a=1,即所有同极性下元件串联构成一条支路。
第二章 变压器 2-1 什么叫变压器的主磁通,什么叫漏磁通?空载和负载时,主磁通的大小取决于哪些因素? 答:变压器工作过程中,与原、副边同时交链的磁通叫主磁通,只与原边或副边绕组交链的磁通叫漏磁通。 由感应电动势公式 Φ=1144.4fN E 可知,空载或负载情况下11E U ≈,主磁通的大小取决于外加电压1U 、频率f 和绕组 匝数 1N 。 2-2 一台50Hz 的变压器接到60Hz 的电源上运行时,若额定电压不变,问激磁电流、铁耗、漏抗会怎样变化 答:(1)额定电压不变,则 '1'11144.444.4Φ=Φ=≈N f fN E U N 又 5060'=f f ?60 50 '=ΦΦ, 即 Φ=Φ65'磁通降低,此时可认为磁路为线性的,磁阻s l R m μ= 不变,励磁磁势m m R N I Φ=?1,∴m m I I 65' =; (2)铁耗: β αf B p m Fe ∝,βα>Θ铁耗稍有减小; (3) σσσπ11''1562x L f x = ?=, σσσπ22' '25 62x L f x =?= 2-3 在导出变压器的等效电路时,为什么要进行归算?归算是在什么条件下进行的? 答:因为变压器原、副边只有磁的联系,没有电的联系,两边电压 21E E ≠、电流不匹配,必须通过归算,才能得到两边直接连接的等效 电路; 归算原则:保持归算前后副边的磁动势不变。 2-4 利用T 型等效电路进行实际问题计算时,算出的一次和二次侧电压、电流和损耗、功率是否为实际值,为什么? 答:一次侧没有经过归算,所以为实际值; 二次侧电压、电流不是实际值,因为归算前后绕组匝数不同,但损耗、功率为实际值。 2-5 变压器的激磁阻抗和等效漏阻抗如何测定? 答:激磁阻抗由空载试验测量;等效漏阻抗由短路试验测量。 (具体测量方法略) 2-14 有一台三相变压器,额定容量 kKA S N 5000=,额定电压kV kV U U N N 3.61021=,Y ,d 联结,试求:(1)一次、 二次侧的额定电流;(2)一次、二次侧的额定相电压和相电流。 解:(1)A A U S I N N N 68.2881035000311=?== A A U S I N N N 21.4583 .635000 322=?== (2)原边Y 联结: kV kV U U N N 77.53 10 311=== Φ A I I N N 68.28811==Φ 副边 ?联结:kV U U N N 3.611==Φ
同步电机的控制原理 一、控制原理 主机结构,包括定子、转子以及控制系统。 定子和异步电机完全相同。转子和线绕异步电机转子相同,有三个线圈,其中两个是励磁绕组,一个是阻尼绕组。励磁绕组通直流电,形成和定子对应的转子磁极,转子磁极在定子旋转磁场的作用下旋转,和定子保持同步。阻尼绕组的作用是防止已进入同步运转的电机失步。 启动状态下,转子的三个绕组起异步启动作用,产生感应电流,使电机逐步升速,直到接近于投磁前的亚同步状态。电机被拉入同步以前,两个励磁绕组经凸轮控制器串联,阻尼绕组经线路转换开关自成回路,这时通入直流电,把异步运转的电机强行拉入同步。 同步运转状态下,阻尼绕组和旋转磁场之间没有相对运动,不产生电流;失步状态下,阻尼绕组和旋转磁场之间有相对运动,产生电流和电动力,电动力的方向刚好和电机失步的方向相反,因此能起到阻止电机失步的作用。 控制系统包括一次系统控制回路和二次系统控制回路两部分。 一次系统控制回路主要是一台六氟化硫开关和一系列保护。有差动保护,过流保护,低电压保护,接地方向保护。 差动保护针对的是定子内部的短路或接地,定子内部短路或接地时,差动保护动作。过流保护主要保护电机的过载,在过载情况下动作。低电压保护在电网出现较长时间低电压情况下动作。接地方向保护在6kV单相完全接地或不完全接地情况下动作。各种保护动作,在切断主回路的同时,也切断直流回路。 二次回路包括励磁控制和启动回路。励磁控制是一套可控硅系统,功能和直流电机控制系统类似而较为简单,没有那么多反馈控制环,只有一个电流反馈控制环; 另外有联锁回路和失步、失磁、过激保护回路。励磁投入必须具备一定条件,如各种保护都没有动作,慢动电机处于脱开的位置,电机启动已进入亚同步状态的信号已送出,等。根据这些条件来准备控制可控硅的投入时间就是连锁,相应的回路称为连锁回路。 相对于一次回路的保护而言,失步、失磁和过激保护属于二次回路的保护。失步保护保护电动的失步。电机失步的破坏性很大,形成的异步力量能剪切转子线圈,所以这个保护功能必须可靠,否则一旦发生失步,后果很严重。该回路检测定子电流、电压。 众所周知,电机运行在功率因数超前状态,定子电流比定子电压滞后;运行在功率因数滞后状态,定子电流比定子电压超前。不论超前还是滞后,6kV回路的电流波和电压波之间都没有相对运动。如果电机失步,电机的电流波和电压波之间立即产生来来回回的相对运动,失步检测回路即捕捉此电流波和电压波来回运动时重合的脉冲。重合一次证明失步一次,重合两次失步保护动作。 失磁是欠激的极限状态,不清楚为什么有失磁保护而没有欠激保护,请各位探讨。失磁信号和过激信号的确定都通过比较放大器实现,比较放大器的给定可以调整。 二、启动过程 同步电机启动必须满足三个条件:1、继电器30C不激磁(过电流保护50/51未动作,接地方向继电器67G未动作,差动继电器87未动作,欠压继电器27未动作,故障继电器86X未动作,激磁变压器一次侧空气开关未跳,故障包括:失磁,失步,过激,启动限时,凸轮控制器及线路转换开关过载保护49AX,慢动电机总空气开关,慢动抱闸空气开关,慢动热保护49I,可控硅风机开关,及其热保护49FX,
发电机基础知识 培训讲义
发电机技术处 周华翔 南京汽轮电机(集团)有限责任公司
1. 电机发展的历史 2. 发电机原理 3. 发电机结构 4. 发电机图纸和文件 5. 发电机成套范围
1. 电机发展的历史
在人类的科技发
展史中,对于电现象 和磁现象很早就有认 识了。但对于两者之 间的联系,却直到 183 年 前 才 发 现 。 这 个发现者的名字叫法 拉第,他是一位英国 物理学家。
早在1821年,法拉第发现了载流 导体在磁场中会受到力的作用的现象, 1831年又发现了电磁感应定律,并很 快就出现了原始模型电机。从此电机的 研究和应用迅速发展起来,至今已有 180多年。
z 电机发展的初期主要是直流电机
z 1869年法国电气工程师格拉姆发明了 第一台实用的直流发电机
z 1882年美国发明家爱迪生指挥建造了 第一个用于商业中心的直流照明系
z 1883年塞尔维亚裔美国人特斯拉发明 了第一台两相感应电机
z 1888年俄国电气工程师多利沃-多勃鲁 夫斯基发明了三相感应电机。
? 1912年英国派生斯公司已能生产4极 25MW汽轮发电机。
? 上世纪20年代美国和欧洲一些其他国 家已能生产类似的汽轮发电机,其中德 国西门子公司、匈牙利冈茨厂对发电机 的通风冷却有较多的创新,为后来汽轮 发电机冷却系统的发展奠定了基础。
? 上世纪30年代许多欧美国家可以生产 50~60MW的汽轮发电机。
大型高压同步电动机,由于其具有一系列优点,特别是能向电网发送无功功率,改善电网质量,在各行各业得到广泛应用。我公司球磨机用同步电动机曾在一段时期内频繁损坏,直接影响到我公司的生产和设备的安全运行。因此正确分析判断同步电机的故障原因,并提出相应对策,就成了我们的当务之急。 一、事故征象 我公司现有16台1300KW/6KV同步电动机。在2000年以前平均每年要出现2~3次电机烧损的事故。其事故主要征象为:定子绕组端部绑线崩断,电机定子绕组过热,起动绕组笼条开焊、断裂,电机起动及运行中出现异常声响,经常启动失败等现象。 尤其是在1999年1月12日我公司7#同步电动机运行过程中突然放炮,造成7#同步电动机定子线圈局部严重烧坏,高压电缆接头烧损,电流互感器崩坏,由于7#同步机脱扣装置拒动,保护不能正常动作,持续大电流引起密地变电所密27选Ⅱ线保护动作跳闸,影响到选Ⅱ所带其它用电设备停机。 二、事故原因的基本判断分析 1、电机质量分析: 电机的正常使用寿命一般应在20年左右。统计我公司所损坏的同步电动机,运行寿命大多在10年以下,尤其是这台7#同步电动机大修后,投运仅4个月便出现了这次放炮烧损事故。 在事故分析中,部分电气技术人员将事故的主要原因归结到电机的大修上。这种大面积的电机损害事故,将事故原因归结到电机质量上,我对此提出异议。建议将视线转移到对励磁系统的分析上;事实证明,电机修理厂在电机返修中对其重点部位进行了种种加强措施,甚至于提高了绝缘等级,但效果并不显著。损坏事故仍不断出现。 2、励磁系统原因分析: 针对同步电动机起动运行过程中发生异常声响、电机定子绕组过热、起动绕组笼条开焊、断裂等诸多现象,在排除电机质量原因引起事故的条件下,有必要对现行的励磁系统进行合理的分析,从而找出电机频繁损坏的真正原因:励磁系统设计不合理。 三、励磁系统存在的主要问题与电机故障原因的内在联系 1、励磁装置起动回路设计不合理,使同步电机经常处在脉振情形下起动。 原主电路为桥式半控励磁装置,其原理图如图1所示。 电机在起动过程中,在转子线圈内将感应一交变电势,其正半波通过ZQ形成回路,产生+if;而其负半波则通过KQ及RF形成回路,产生-if。由于负载电路不对称,形成+if与-if 电流不对称,if曲线如图2所示。电机定子电流因此也产生强烈脉振,其曲线如图3。电机因而遭受到脉振转矩的强烈振动。造成整个厂房大厅内都可以听到电机起动过程发出的强烈振动声。这种声音一直持续到电机起动结束才消失。
多台电机同步调速器的应用 (TB-4同步控制器使用说明书) 同步控制是工业控制中常见的控制方式,传统的机械同步控制由于精度和可调性差而逐渐减少,我所开发的TB-4 同步控制器由于控制精度高,输出模拟量可选性多,能多台同步器并联使用, 等优点而在电线电缆, 皮革, 钢铁, 纺织, 造纸, 等一些需要电机同步同速和同步非同速控制的行业被大量应用。TB-4 同步控制器就其工作原理而言,实际上是一台具有4 路直流模拟量(电压或电流)控制信号输出的信号发生器。 技术参数; 自动控制输入:0-5VDC 。0-10V DC 手动控制:主调10K 电位器 模拟量输出四组电压型;0-5VDC . 1-5VDC. 0-10V . 2-10V 。 模拟量输出四组电压型:0-10ma. 0-20ma .2-10ma.4-20ma 软启动时间调节:0-60 秒 控制电机台数;4-48 台 可接口调速器:力矩电机控制器,直流电机调速器,变频器,电磁电机调速器,等可调速电机控制器。 外型尺寸 原理示意图
同步器的技术及其特点 TB-4 同步器,内部采用MAXI 公司的是最新12 位D/A ,A/D 转换电路,他能通过主调电位器同时输出 4 组电压量或电流量信号,这四组信号可通过4 个多圈微调电位器,在原有主调电位器调节输出的(电压或电流)基础上增加或衰减,以达到多台电机的同步同速和同步非同速控制。 软启动曲线图 该控制器具有输出模拟量(电压或电流)随时间线性上升功能,调节机器内部电位器W1 可使上升时间,0-60秒线性调节(图 1 ) 注:V/I 输出电压和电流,ms 启动时间 应用举例:
同步电机与异步电机区别说的非常好 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
一、同步电机和异步电机在设计上的不同: ①同步与异步的最大区别就在于看他门的转子速度是不是与定子旋转的磁场速度一致,如果转子的旋转速度与定子是一样的,那就叫同步电动机,如果不一致,就叫异步电动机。。。 ②当极对数一定时,电机的转速和频率之间有严格的关系,用电机专业术语说,就是同步。异步电机也叫感应电机,主要作为电动机使用,其工作时的转子转速总是小于同步电机。 ③所谓“同步”就是电枢(定子)绕组流过电流后,将在气隙中形成一旋转磁场,而该磁场的旋转方向及旋转速度均与转子转向,转速相同,故为同步。 异步电机的话,其旋转磁场与转子存在相对转速,即产生转距。 二、为什么会同步,为什么会不同步呢? 同步电机和异步电机的定子绕组是相同的,主要区别在于转子的结构。同步电机的转子上有直流励磁绕组,所以需要外加励磁电源,通过滑环引入电流;而异步电机的转子是短路的绕组,靠电磁感应产生电流。相比之下,同步电机较复杂,造价高。 同步和异步电机均属交流动力电机,是靠50Hz交流电网供电而转动。异步电机是定子送入交流电,产生旋转磁场,而转子受感应而产生磁场,这样两磁场作用,使得转子跟着定子的旋转磁场而转动。其中转子比定子旋转磁场慢,有个转差,不同步所以称为异步机。而同步电机定子与异步电机相同,但其转子是人为加入直流电形成不变磁场,这样转子就跟着定子旋转磁场一起转而同步,始称同步电机。 简单的说就是:异步电机的转子上没加直流励磁电流,同步电机的转子上加了一个直流励磁电流使转子的转速与定子与转子切割产生的磁场转速一致。 三、同步发电机转子为什么要通入直流励磁电流,而不通入交流励磁电流? 按工频50HZ考虑,转子通入直流励磁电流,可在定子绕组中感应出50HZ电势。 转子通入交流励磁电流后,可分解为正向与反向两个旋转磁场,正向旋转磁场旋转速度与转子旋转速度迭加,在定子绕组中感应出100HZ电势;反向旋转磁
龙源期刊网 https://www.doczj.com/doc/7a1090829.html, 浅析两台异步电机的同步控制 作者:殷雄 来源:《科技资讯》2012年第02期 摘要:在两台异步电机(分别命名为1#,2#,下同)的控制中,以1#电机为基准,采用基 于PLC技术的变频控制,根据根据负载需要,不断改变1#电机的转速,为了达到两台异步电机的同步运行,以1#电机的转速为给定量,2#电机的转速为随动量,也采用基于PLC技术的闭环变频控制。从而实现两台异步电机的精确同步运行,也达到了节能之目的。 关键词:异步电机同步控制节能 中图分类号:TPO文献标识码:A文章编号:1672-3791(2012)01(b)-0134-01 随着国民经济的发展,生产过程中的机械化程度不断提高,而机械化程度的不断提高与电机特别是异步电机的广泛应用和精确控制是密不可分的。在海绵、塑料制品和钢铁行业生产过程中,对异步电机的同步控制要求十分高。例如:在海绵发泡过程中,必须保证两台电机转速的同步,如果2#电机的转速大于1#电机的转速,就会造成切断机刀架拉坏,如果2#电机的转速小于1#电机的转速就不能切断海绵。这两种情况在实际生产中是不允许的,因为这会造成 设备的损坏和产品的报废,从而造成经济损失,影响企业的效益。本文依据负载需要对两台电机采用闭环PLc变频控制,从而实现两台异步电机的转速同步控制,以满足工业生产的需要。 1基于PLC技术的1#电机转速变频控制的实现 先令1#电机以最低频率(35Hz)进行启动,当电机启动后,依据生产需要,不断改变电机转速的给定值,并将给定值输入PLC相应模块,与1#电机的相连的测速电机对1#电机进行测速,并将所测的速度值也输入PLC相应模块,让PLC进行判断。如果测速电机所测的速度大于给定速度时,那么PLC向1#电机的变频器发出无极降速的指令,从而让1#电机的变频器降低频率进而降低转速;如果测速电机所测的速度小于给定速度时,那么PLC向1#电机的变频器发出无极升速的指令,从而让1#电机的变频器提高频率进而升高转速。其PLC闭环控制原理图如图1所示,其PLC闭环控制流程图如图2所示。
每相感应电势的有效值为
(15.2) ◆ 交变性与对称性:由于旋转磁场极性相间,使得感应电势的极性交变;由于电枢绕组的对称性,保证了感应电势的三相对称性。 同步转速 ◆同步转速 从供电品质考虑,由众多同步发电机并联构成的交流电网的频率应该是一个不变的值,这就要求发电机的频率应该和电网的频率一致。我国电网的频率为50Hz ,故有: (15.3) ◆要使得发电机供给电网50Hz 的工频电能,发电机的转速必须为某些固定值,这些固定值称为同步转速。例如2极电机的同步转速为3000r/min ,4极电机的同步转速为1500r/min ,依次类推。只有运行于同步转速,同步电机才能正常运行,这也是同步电机名称的由来。 运行方式 ◆同步电机的主要运行方式有三种,即作为发电机、电动机和补偿机运行。 作为发电机运行是同步电机最主要的运行方式,作为电动机运行是同步电机的另一种重要的运行方式。同步电动机的功率因数可以调节,在不要求调速的场合,应用大型同步电动机可以提高运行效率。近年来,小型同步电动机在变频调速系统中开始得到较多地应用。 同步电机还可以接于电网作为同步补偿机。这时电机不带任何机械负载,靠调节转子中的励磁电流向电网发出所需的感性或者容性无功功率,以达到改善电网功率因数或者调节电网电压的目的。 ? 西安交通大学电机教研室 版权所有,侵权必究 2000.12?
水轮发电机 水轮发电机的特点是:极数多,直径大,轴向长度短,整个转子在外形上与汽轮发电机大不相同。大多数水轮发电机为立式。水轮发电机的直径很大,定子铁心由扇形电工钢片拼装叠成。为了散热的需要,定子铁心中留有径向通风沟。转子磁极由厚度为1~2mm 的钢片叠成;磁极两端有磁极压板,用来压紧磁极冲片和固定磁极绕组。有些发电机磁极的极靴上开有一些槽,槽内放上铜条,并用端环将所有铜条连在一起构成阻尼绕组,其作用是用来拟制短路电流和减弱电机振荡,在电动机中作为起动绕组用。磁极与磁极轭部采用 T 形或鸽尾形连接,如图15.4所示。 隐极式转子 隐极式转子上没有凸出的磁极,如图15.2b 所示。沿着转子本体圆周表面上,开有许多槽,这些槽中嵌放着励磁绕组。在转子表面约1/3部分没有开槽,构成所谓大齿,是磁极的中心区。励磁绕组通入励磁电流后,沿转子圆周也会出现 N 极和 S 极。在大容量高转速汽轮发电机中,转子圆周线速度极高,最大可达170米/秒。为了减小转子本体及转子上的各部件所承受的巨大离心力,大型汽轮发电机都做成细长的隐极式圆柱体转子。考虑到转子冷却和强度方面的要求,隐极式转子的结构和加工工艺较为复杂。
电机学知识点讲义汇总 第一章 基本电磁定律和磁路 电机的基本工作原理是建立在电磁感应定律、全电流定律、电路定律、磁路定律和电 磁力定律等定律的基础上的,掌握这些基本定律,是研究电机基本理论的基础。 ▲ 全电流定律 全电流定律 ∑?=I Hdl l 式中,当电流方向与积分路径方向符合右手螺旋关系时,电流取正号。 在电机和变压器的磁路计算中,上式可简化为 ∑∑=Ni Hl ▲电磁感应定律 ①电磁感应定律 e=- dt d N dt d Φ-=ψ 式中,感应电动势方向与磁通方向应符合右手螺旋关系。 ②变压器电动势 磁场与导体间无相对运动,由于磁通的变化而感应的电势称为变压器电动势。电机中的 磁通Φ通常是随时间按正弦规律变化的,线圈中感应电动势的有效值为 m fN E φ44.4= ③运动电动势 e=Blv ④自感电动势 dt di L e L -= ⑤互感电动势 e M1=- dt di 2 e M2 =-dt di 1 ▲电磁力定律 f=Bli ▲磁路基本定律 ① 磁路欧姆定律 Φ=A l Ni μ=m R F =Λm F 式中,F=Ni ——磁动势,单位为A ; R m =A l μ——磁阻,单位为H -1; Λm = l A R m μ=1——磁导,单位为H 。
② 磁路的基尔霍夫第一定律 0=?s Bds 上式表明,穿入(或穿出)任一封闭面的磁通等于零。 ③ 磁路的基尔霍夫第二定律 ∑∑∑==m R Hl F φ 上式表明,在磁路中,沿任何闭合磁路,磁动势的代数和等于次压降的代数和。 磁路和电路的比较 第二章 直流电动机 一、直流电机的磁路、电枢绕组和电枢反应 ▲磁场是电机中机电能量转换的媒介。穿过气隙而同时与定、转子绕组交链的磁通为主磁 通;仅交链一侧绕组的磁通为漏磁通。直流电机空载时的气隙磁场是由励磁磁动势建立 的。空载时,主磁通Φ0与励磁磁动势F 0的关系曲线Φ0=f (F 0)为电机的磁化曲线。从磁 化曲线可以看出电机的饱和程度,饱和程度对电机的性能有很大的影响。 ▲ 电机的磁化曲线仅和电机的几何尺寸及所用的材料有关,而与电机的励磁方式无关。 电机的运行特性与磁化曲线密切相关。设计电机时,一般使额定工作点位于磁化曲线 开始弯曲的部分,这样既可保证一定的可调节度,又不至于浪费材料。 ▲ 直流电机电枢绕组各元件间通过换向器连接,构成一个闭合回路,回路内各元件的电 动势互相抵消,从而不产生环流。元件内的电动势和电流均为交变量,通过换向器和 电刷间的相对运动实现交直流转换。电刷的放置原则是:空载时正、负电刷之间获得 最大的电动势,这时被电刷短路的元件的电动势为零。因此,电刷应放在换向器的几 何中性线上。对端接对称的元件,换向器的几何中性线应与主极轴线重合。 ▲ 不同型式的电枢绕组均有①S=K=Z ;②y 1=Z i /2p ε=整数;③y=y 1+y 2。其中,S 为元 件数,K 为换向片数,Z i 为虚槽数,p 为极对数,y 1为第一节距,y 2为第二节距,y 为 合成节距,ε为小于1的分数,用来把y 1凑成整数。对单叠绕组,y=±1,y 2小于 0,并联支路对数a=p ,即每极下元件串联构成一条支路。对单波绕组,y 2大于零, a=1,即所有同极性下元件串联构成一条支路。
伺服电机同步控制技术在印刷行业的应用 在印刷机械行业中,多电机的同步控制是一个非常重要的问题。由于印刷产品的特殊工艺要求,尤其是对于多色印刷,为了保证印刷套印精度(一般≤0.05mm),要求各个电机位置转差率很高(一般≤0.02%)。在传统的印刷机械中,以往大都采用以机械长轴作为动力源的同步控制方案,但机械长轴同步控制方案易出现振荡现象,各个机组互相干扰,而且系统中有许多机械零件,不方便系统维护和使用。随着机电一体化技术的发展,现场总线技术不断应用到各个领域并得到了广泛的应用。本文针对机组式印刷机械的同步需求,提出了一种基于CAN现场总线的同步控制解决方案,并得以验证。 一、无轴传动印刷机控制系统的同步需求 机组式卷筒印刷机一般由给纸机组、印刷机组、张力机组、加工机组和复卷机组等机组组成。在传统的有轴传动印刷机中,动力源由异步电机通过皮带轮带动一根机械长轴(约10-20m),然后通过长轴带动各机组的齿轮、凸轮、连杆等传动元件,再通过传动元件带动设备的执行元件完成设备的输人、输出任务。 卷筒印刷机要求印刷速度为300m/min,套印精度≤0.03mm,为了满足套印精度,要求在各个机组定位精度≤0.03 mm。在印刷机印刷过程中,要求各机组轴与机械长轴保持一定的同步运动关系,能否很好的实现各个机组轴的同步关系,将直接影响到印刷速度、套印精度等。其中,给纸机组、印刷机组要求与主轴转动速度成一定的比例关系,张力机组根据不同的印刷速度调整张力系数,加工机组需要与主轴保持凸轮运动关系,而复卷机组的运动规律,要求随着纸卷直径的增大而减小。 我们把机械长轴作为主轴(参考轴),各印刷机组轴为从动轴,如图1,各从动轴与主轴要满足同步关系θ1=f1(θ),θ2=f2(θ),θ3=f3(θ)···,其中,θ为主轴位置转角,θ1、θ2、θ3···为从动轴位置转角。 二、同步控制系统设计
5.2同步发电机的运行特性(空载特性、短路特性、外特性) 5.3同步发电机的并列方法(定速、升压、并网前准备、准同期并网)。 5.4同步发电机的功角特性(有功调节、无功调节、静态稳定性、V形曲线、发电机的PQ运行曲线) 5.5同步发电机的故障分析(突然短路、不对称运行、失磁、失步、震荡) 同步电机原理和结构 同步电机原理简述 结构模型 ?同步发电机和其它类型的旋转电机一样,由固定的定子和可旋转的转子两大部分组成。一般分为转场式同步电机和转枢式同步电机。 ?图15.1给岀了最常用的转场式同步发电机的结构模型,其定子铁心的内圆均匀分布着定子槽,槽内嵌放着按一定规律排列的三相对称交流绕组。这种同步电机的定子又称为电枢,定子铁心和绕组又称为电枢铁心和 电枢绕组。 ?转子铁心上装有制成一定形状的成对磁极,磁极上绕有励磁绕组,通以直流电流时,将会在电机的气隙中形成极性相间的分布磁场,称为励磁磁场(也称主磁场、转子磁场)。 ?气隙处于电枢内圆和转子磁极之间,气隙层的厚度和形状对电机内部磁场的分布和同步电机的性能有重大影响。 ?除了转场式同步电机外,还有转枢式同步电机,其磁极安装于定子上,而交流绕组分布于转子表面的槽内,这种同步电机的转子充当了电枢。图中用AX、BY、CZ三个在空间错开120电角度分布的线圈代表三相对 称交流绕组。 图15.1同步电机结构彳輕 工作原理 ?主磁场的建立:励磁绕组通以直流励磁电流,建立极性相间的励磁磁场,即建立起主磁场。 ?载流导体:三相对称的电枢绕组充当功率绕组,成为感应电势或者感应电流的载体。 ?切割运动:原动机拖动转子旋转(给电机输入机械能),极性相间的励磁磁场随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场)。 ?交变电势的产生:由于电枢绕组与主磁场之间的相对切割运动,电枢绕组中将会感应出大小和方向按周 期性变化的三相对称交变电势。通过引岀线,即可提供交流电源。
同步电机习题与答案 6.1 同步电机的气隙磁场,在空载时是如何激励的?在负载时是如何激励的?[答案见后] 6.2 为什么大容量同步电机采用磁极旋转式而不采用电枢旋转式? [答案见后] 6.3 在凸极同步电机中,为什么要采用双反应理论来分析电枢反应? [答案见后] 6.4 凸极同步电机中,为什么直轴电枢反应电抗X ad大于交轴电枢反应电抗 X aq? [答案见后] 6.5 测定同步发电机的空载特性和短路特性时,如果转速降为原来0.95n N,对试验结果有什么影响? [答案见后] 6.6 一般同步发电机三相稳定短路,当I k=I N时的励磁电流I fk和额定负载时的励磁电流I fN都已达到空载特性的饱和段,为什么前者X d取不饱和值而后者取饱和值?为什么X q一般总是采用不饱和值? [答案见后] 6.7 为什么同步发电机突然短路,电流比稳态短路电流大得多?为什么突然短路电流大小与合闸瞬间有关? [答案见后] 6.8 在直流电机中,E>U还是U>E是判断电机作为发电机还是作为电动机运行的依据之一,在同步电机中,这个结论还正确吗?为什么?
[答案见后] 6.9 当同步发电机与大容量电网并联运行以及单独运行时,其cosφ是分别由什么决定的?为什么? [答案见后] 6.10 试利用功角特性和电动势平衡方程式求出隐极同步发电机的V形曲线。[答案见后] 6.11 两台容量相近的同步发电机并联运行,有功功率和无功功率怎样分配和调节? [答案见后] 6.12 同步电动机与感应电动机相比有何优缺点? [答案见后] 6.13 凸极式同步发电机在三相对称额定负载下运行时,设其负载阻抗为R+jX,试根据不考虑饱和的电动势相量图证明下列关系式 [答案见后] 6.14 试述直流同步电抗X d、直轴瞬变电抗X′d、直轴超瞬变电抗X"d的物理意义和表达式,阻尼绕组对这些参数的影响? [答案见后] 6.15 有一台三相汽轮发电机,P N=25000kW,U N=10.5kV,Y接法,cosφN=0.8(滞后),作单机运行。由试验测得它的同步电抗标么值为X*t=2.13。电枢电
异步电机(感应电机)的工作原理是通过定子的旋转磁场在转子中产生感应电流, 产生电磁转矩,转子中并不直接产生磁场.因此,转子的转速一定是小于同步速的(没有这个差值,即转差率,就没有转子感应电流),也因此叫做异步电机. 而同步电机转子本身产生固定方向的磁场(用永磁铁或直流电流产生),定 子旋转磁场"拖着"转子磁场(转子)转动,因此转子的转速一定等于同步速,也因此 叫做同步电机. 作为电动机时,大部分是用异步机;发电机都是同步机。 同步电机和异步电机的区别 三相交流电通过一定结构的绕组时,要产生旋转磁场.在旋转磁场的作用下, 转子随旋转磁场旋转.如果转子的转速同旋转磁场的转速完全一致,就是同步电机;如果转子的转速小于磁场转速,也就是说两者不同步,就是异步电机.异步电机结 构简单,应用广泛.同步电机要求转子有固定的磁极(永磁或电磁),如交流发电机和 同步交流电动机. 电机的转速(定子转速)小于旋转磁场的转速,从而叫为异步电机。它和感应电机基本上是相同的。s=(ns-n)/ns。s为转差率, ns为磁场转速,n为转子转速。 基本原理:(1)当三相异步电机接入三相交流电源时,三相定子绕组流过三相对 称电流产生的三相磁动势(定子旋转磁动势)并产生旋转磁场。 (2)该旋转磁场与转子导体有相对切割运动,根据电磁感应原理,转子导体产生感 应电动势并产生感应电流。 (3)根据电磁力定律,载流的转子导体在磁场中受到电磁力作用,形成电磁转矩,驱动转子旋转,当电动机轴上带机械负载时,便向外输出机械能。 特点: 优点:结构简单,制造方便,价格便宜,运行方便。 缺点:功率因数滞后,轻载功率因数低,调速性能稍差。 主要做电动机用,一般不做发电机! 异步电机是一种交流电机,其负载时的转速与所接电网的频率之比不是恒定关系。异步电机包括感应电机、双馈异步电机和交流换向器电机。感应电机应用最广,在不致引起误解或混淆的情况下,一般可称感应电机为异步电机。 普通异步电机的定子绕组接交流电网,转子绕组不需与其他电源连接。因此,它具有结构简单,制造、使用和维护方便,运行可靠以及质量较小,成本较低等优
平面电机 0引言 目前,实际应用中较为广泛的能够实现二维驱动及定位的方法有三种:一是压电陶瓷配合柔性铰链机构进行驱动,二是利用传统的旋转电机驱动,三是利用直线电机进行直接驱动。虽然这三种机构都可以实现二维平面定位,但是均存在着不同方面的缺陷。柔性铰链机构和压电陶瓷驱动元件所组成的系统易实现整体式结构、位移控制精度高、功耗小,但是柔性铰链的阻尼、小行程,以及压电陶瓷的迟滞、非线性等特性对工作台性能的提高会带来不利影响。由于丝杠加螺母等直线运动转换机构存在摩擦、侧隙、变形等一系列问题,并且转换机构的两套传动链引入了附加质量,使得传统的两组旋转电动机加直线转换机构定位装置的精度和响应速度很难达到较高的水平。直线电动机构成的平面定位装置虽然定位精度有了很大的提高,但是仍未摆脱“低维运动机构叠加成高维运动机构”模式,底层直线电机仍需要承担顶层直线电机以及相关机械连接件的质量。 为了使二维驱动装置能够实现更高精度的定位,需要研究利用电磁能直接产生平面运动的装置,即平面电机。与传统的定位工作台相比,平面电机的运动轨迹不是靠两个相互垂直的导轨运动方向上的合成而致,而是直接利用电磁能产生平面定位运动,具有出力密度高、低热耗、高精度等特点,另外由于摒弃了丝杠、螺杆等中间转换装置,故可以实现控制对象和平面电机的一体化,因而具有响应速度快,灵敏度高,随动性好以及体积小等优点。 1变磁阻型平面电机 根据电磁推力的产生原理,可将平面电机分为变磁阻型、感应型、永磁同步型和直流型四大类,其中变磁阻型又包含了步进式和开关磁阻式两种。 1.1步进式平面电机 步进式平面电动机是研究最早、理论最为成熟的一类平面电机,也是目前仅有的形成产品的平面电机。在步进式平面电动机中,一般将一块永磁体和两组缠绕在铁心上的驱动线圈作为一个单元,由相互垂直的两个单元构成动子,而将开有均匀分布平行槽的叠片铁心作为定子,为动子提供闭合磁路。步进式平面电机的内部磁场由动子各相绕组的脉冲电流产生。当某一方向上的两组驱动线圈交替通入脉冲电流时,会分别对永磁体产生增磁或者去磁作用,根据磁阻最小原理,定子与动子之间将产生使磁路磁阻减小的磁拉力作用,从而驱动电动机产生步进运动,若同时考虑X、Y两方向上的作用力,即可实现电机动子在定子平面上的二维运动。典型的步进式平面电机的基本结构如图1所示。 图1 步进式平面电机结构图 步进式平面电动机的具有很多优点,例如位移量与输入脉冲数成正比,没有积累误差,具有良好跟随性,结构简单可靠,输出力较大,动态响应快,自起动能力强等,但是也存在