
定义
舵效产生的原因
B
C L L F b s
s
L =?=
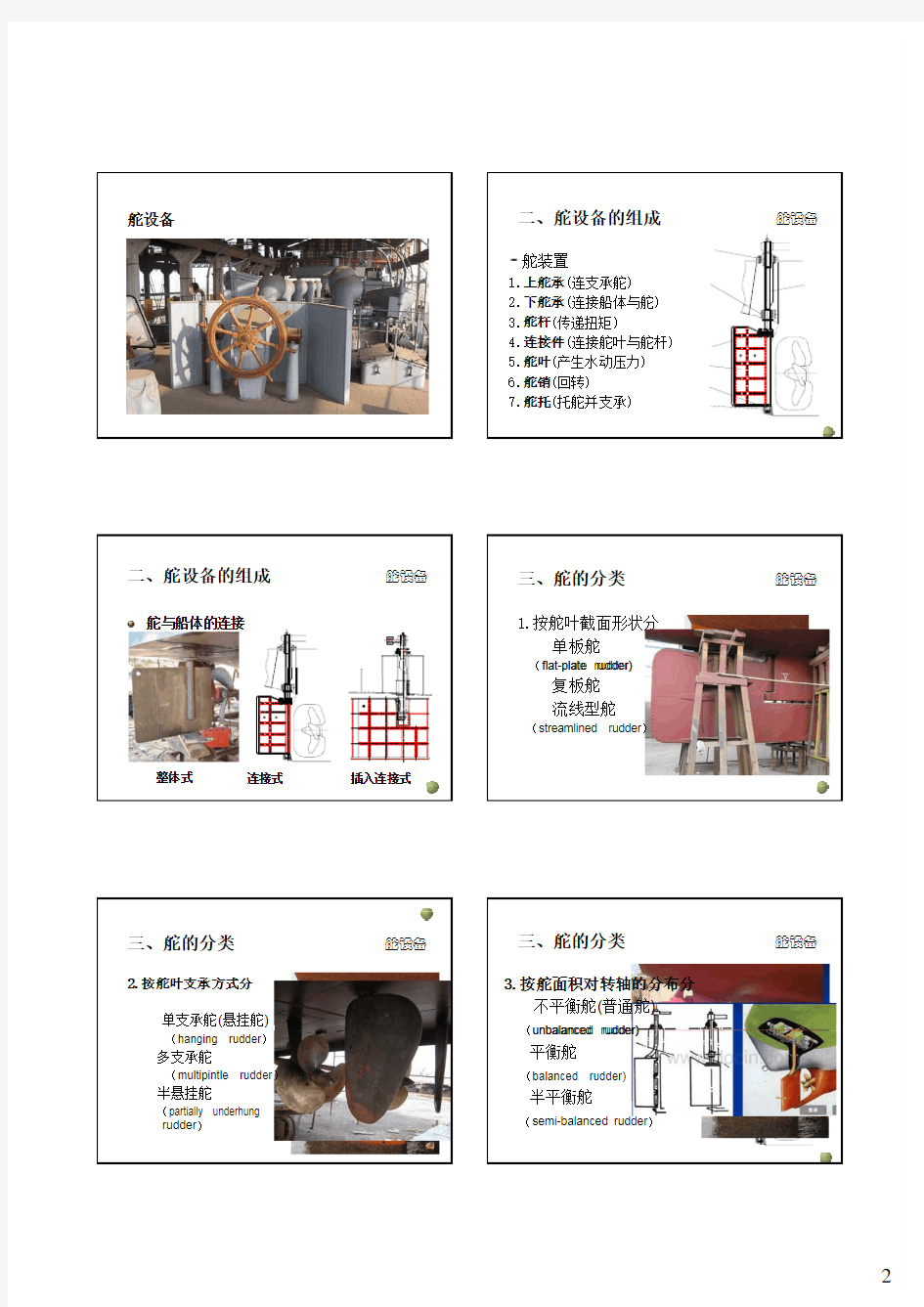
φ舵设备
船舵和发展
“深涉南海数万里,千万舵是远洋航行的三大要件史称“轩辕作舟,夏禹作舵”至迟到东汉我人民已发明船舵,广州东汉墓出土的陶船操舵器、舵角指示器、传动装置
舵装置
舵与船体的连接整体式
1.按舵叶截面形状分
streamlined rudder))
multipintle rudder)partially underhung 3.按舵面积对转轴的分布分
普通舵)
rudder)
unbalanced rudder)
semi-balanced rudder)
备
襟翼舵
2.襟翼舵
3.转柱舵
4.平旋推进器(VCR)
5.Z形推进器
舵的几何要素
7.剖面形状面舵的水动力特性
4.水动力关系式:P =ρA r V 2C /2
P L 、P D 、P N 、P T M =P N ×x p
Ma =P N (x p -S)
α
S v
P P P N M
P O
L
D
Ma 5.水动力系数
C = 2P/(ρV 2A r )C L 、C
D 、C N 、C T C M = C N ×C p
几何相似的舵,在相同的流态中C L 、C D 、C p 相等
T
p
b
P x x
影响(敞水)舵水动力特性的因素舵角与舵效射流V (水流强度)不变
30°时,P(=V) 舵升力﹥阻力45°时,P(=V) 舵升力=阻力60°时,P(=V) 舵升力﹤阻力
最佳舵效:一般平板舵在35度;流线型舵在32度影响(敞水)舵水动力特性的因素
翼端绕流:攻角减小界层分离:叶背紊流
影响舵水动力特性的因素
影响舵水动力特性的因素
λ>1.8后,t对C
般船舶λ在0.8左右,故影响较大;
α<θ时, C
小;
一般船舶,t=15~17%时,C
T
设计内容与步骤
舵、桨配合
舵形式、数量选择、位置的确定
剖面形状、厚度比、平衡系数的确定剖面形状、厚度比、平衡系数的确定
敞水舵水动力特性计算
敞水舵水动力特性计算计算
舵压力及力矩实用算法
敞水舵水动力特性计算
敞水舵水动力特性计算舵压力及力矩实用算法敞水舵水动力特性计算舵压力及力矩实用算法
舵柄处转舵需要的扭矩
影响船后舵水动力的因素
35000DWT散货船舵系拉线镗孔工艺规范 本船编号:YH0709 本工艺以CSQS中国造船质量标准(1998)为依据,并参考沿海船厂之相关工艺文件,结合CCS规范与本船的实际情况编制而成。 1 范围 本工艺规定了船舶舵系拉线镗孔工艺的工艺准备、人员、工艺要求、工艺过程及检验。 本工艺适用于万吨级以上钢质船舶的舵系镗孔。其他钢质船舶亦可参照使用。 2 工艺规范性引用文件 CSQS中国造船质量标准(1998) 3 工艺准备 3.1必须认真阅读并熟悉该船的艉轴系总图,推进轴系统布置图,中间轴座架 图,舵系布置图,主机安装图等及相关工艺技术文件,施工时需带到现场。 3.2拉线镗孔工具准备 a)镗孔专用设备; f ) 拉线架2付半(5只); b)校中用划针盘及弹性接头;g ) 木角尺一把; c)月牙扳手;h ) 线锤2只,桩头16只; d)刀具;I ) 万用表1只,内经分厘卡; e)钢丝线100米(○0﹒5MM);j ) 木制洋棒2根等工具。 3.3检查镗孔工装设备完好性。 3.4 依照上舵承座和上下舵销座,制作镗孔架。 3.5 确认上舵承座、工艺法兰及上下舵销座上下端面镗孔所需的校圆线,镗削 圆线及提高校中精度的工艺基准螺丝钉。 4 人员 4.1 操作人员和检验人员应具备专业知识,并经过相关专业培训、考试或考核 取得合格证书,方可上岗操作。 4.2 操作人员和检验人员应熟悉本船工艺规范要求,并严格遵守工艺纪律。 5 工艺要求
5.1 镗孔的圆度、圆柱度公差符合CSQS中国造船质量标准(1998),见表1。 表1 镗孔圆度、圆柱度公差值 单位为毫米 孔径 D 公差标准范围 ≤120 ≤0.015 >120~180 ≤0.020 >180~260 ≤0.025 >260~360 ≤0.030 >360~500 ≤0.035 >500~700 ≤0.040 >700~900 ≤0.050 >900~1100 ≤0.060 >1100~1300 ≤0.070 >1300~1500 ≤0.080 5.2 5.3 5.4 5.5 6 工艺过程 6.1镗杆安装时,应按上舵承座及工艺法兰、上舵销座上端面与下舵销座下端 面上的校圆线和工艺基准螺钉为校中依据,用内径千分尺调整镗杆与工艺基准间的距离,使镗杆与舵系中心重合,误差不大于0.02mm。镗杆与舵系中心重合见图1
List of left-driving countries 右座国家 The following is a list of countries of the world whose inhabitants drive on the left-hand side of the road. Most of the drivers of these countries use right-hand-drive vehicles. 1. Anguilla 安圭拉岛(位于西印度群岛) 2. Antigua and Barbuda 安提瓜岛 3. Australia 澳大利亚 4. Bahamas 巴哈马群岛 5. Bangladesh 孟加拉国[亚洲] 6. Barbados 巴巴多斯岛 7. Bermuda 百慕大群岛(北大西洋西部群岛) 8. Bhutan 不丹(印度东北一国家) 9. Botswana 博茨瓦纳(位于南非共和国内,于1966年独立) 10. Brunei 文莱 11. Cayman Islands 开曼群岛[拉丁美洲] 12. Christmas Island (Australia) 澳洲 13. Cook Islands 库克群岛(英国) 14. Cyprus 塞浦路斯(地中海东部一岛) 15. Dominica 多米尼加(西印度群岛岛国) 16. East Timor 东帝汶(位于东南亚,曾是葡萄牙殖民地) 17. Falkland Islands 福克兰群岛[南大西洋](即马尔维纳斯群岛) 18. Fiji 斐济 19. Grenada 格林纳达 20. Guernsey (Channel Islands)英吉利海峡格恩西岛 21. Guyana 圭亚那(拉丁美洲) 22. Hong Kong 23. India 24. Indonesia 印尼(东南亚岛国) 25. Ireland 爱尔兰 26. Isle of Man 马恩岛(英属国家) 27. Jamaica 牙买加(拉丁美洲) 28. Japan 29. Jersey (Channel Islands)泽西岛是英吉利海峡靠近法国海岸线的海峡群岛(Channel Islands)里 30. Kenya 肯尼亚 31. Kiribati .基里巴斯(西太平洋上一共和国) 32. Cocos (Keeling) Islands (Australia) 33. Lesotho 莱索托(非洲南部一王国, 首都Maseru) 34. Macau 35. Malawi 马拉维(非洲国家)
Futaba S3010参数说明 Futaba S3010参数说明 2011-04-13 21:22 黑线( 接地) , 红线( 电源线) 和白色(控制线)。 以下为Futaba S3010的参数说明: S表示舵机,3表示它用的是三级马达,0表示是泛用型,10是指此舵机为模拟电路控制舵机。 舵机S3010 技术规格 规格, 舵机, 技术 整体介绍: 主用途通用伺服器 特征低成本,高扭矩 基板 S256 马达 Tricore GM1510 VR TR133-15 其他 MATAL 轴承,引线长 300mm,HORND 寸法(L×W×H) 40.0×20×38.1 [mm] 重量 41 [g]
消费电流: 停止时 MAX 15 [mA](无负荷) (4.8V 时) 动作时 130 + 25 [mA](无负荷) 消费电流: 停止时 MAX 15 [mA](无负荷) (参考值:6.0V 时) 动作时 145 + 30 [mA](无负荷) 输出扭矩: 6.0V 时 6.5 + 1.3 [ Kg.cm] 动作速度 6.0V 时 0.16 + 0.02 [Sec/60 度] (以下数据说明了当S3010: 高电平为1520us时:一定为中间位置; 高电平为920us时:一定为最左边位置; 高电平为2120us时:一定为最右边位置; 这些数据说明了该舵机的转角只与高电平脉宽有关,与占空比无关。) 动作方向: CW pulse 窄(1520 → 920 [us]) CCW pulse 宽(1520 → 2120 [us]) 动作角度: CW 60 + 10 [度] CCW 60 + 10 [度] 左右差 MAX 10 [度]
GY57000-901-066 57000DWT A01C 挂舵臂地面总组工艺 图纸名称: TITLE : 工程名称: PROJECT : 图 号: DWG. NO.: 工 程 号: JOB. NO.: 编制 DESIGNED 校对 CHECKED 设 计 阶 段: DESIGN STAGE : 日期 DATE 日期 DATE 比例 SCALE 版本 REV. 船级社: CLASS : 船 号: SHIP NO.: 生产设计 NA 0 配 布 栏 经营部 生产部 技术部 安监部 质量部 1 船体车间CHEJIAN 机电车间 涂装工区 1 坞修车间 设备部 资产部 造船部 工法室 1 分段工区 区 1 船台工区 1 起运车间 先行室 后行室 船 东 验船师 合 计 会 签 栏 标 记 MARK 日 期 DATE 修 改 原 因 REVISE DESCRIPTION 修 改 REVISER 校 对 CHECKED 审 核 REVIEWED 通用工艺
1. 说明: 本工艺根据57000DWT有关图纸、资料编制而成,适用于57000DWT A01C分段与挂舵臂地面正装总组。 2.总组条件 2.1 A01C分段单独装焊完毕,分段按照图纸要求将纵横结构检验线标出,并打上洋冲标识,A01C分段结构完整性报验打砂油漆完。 2.2挂舵臂分段装焊完成,密性试验完成,打砂油漆完成,内部灌注沥青漆灌装完成,并经过船东、船检报验合格。铸钢件用样冲打出“十”字标志。 2.3按照附图一制作安装总组所需要工装。 3. 总组前的准备工作 3.1在总组场地船台(地面)上划出船台中心线、肋骨检验线、舵杆(0号肋位)中心线(投影点)、F-5肋骨线,划线方向与船台搭载方向一致。 3.2在总组场地船台(地面)按图在距中CL4532左右、FR-3、FR5布置好总组工装。见附图一。 3.3测量挂舵臂上口(F4、F1肋位)吊马眼板的宽度(理论宽度约1500mm),然后在船体结构内10500mm平台板下侧F4、F1肋位甲板中心线两侧各800~900mm范围内安装20吨吊环(横向安装),在挂舵臂F1、F4肋位距上口约2000mm处左右两侧共安装4个20吨吊码,供总组使用。 3.4挂舵臂重约28吨,在船台安装现场准备好4部10吨葫芦。 3.5总组需准备4个50吨的油压千斤顶、水平软管、线锤等船台搭载的必用 工具。 3.6清理总组场地上的杂物,保持场地清洁。 4.总组流程: 4.1将报验打砂完毕的A01C分段用平板车运至总组场地,用200吨龙门吊 将其翻身,分段总重量为122t。 4.2将翻身后的分段吊上已经准备好的总组工装,分段按照船台搭载的方式 定好位(中心线肋检线对准、分段四角水平)后,将分段与工装焊接固
道路通行方向(汽车左舵和汽车右舵) 道路通行方向是世界各国交通规则中的一个重要内容,它规定了车辆在道路上的行驶方位,避免出现混乱和事故。 道路通行方向可分为车辆靠道路左侧行驶和靠道路右侧行驶两类。34%的国家靠左行驶,66%的国家靠右行驶。如果按道路里程计算,全世界28%的可通行道路是靠左行驶的,72%靠右行驶。 ________________________________________________________ 靠左侧行驶的国家和地区列表:(右舵) 注:括号中的数字为转换至左侧行驶的年份 亚洲 孟加拉 不丹 文莱 东帝汶(1928—1976靠右通行)印度 印度尼西亚 日本(冲绳 1978) 马来西亚 马尔代夫 尼泊尔 巴基斯坦 新加坡 斯里兰卡 泰国 香港 澳门 欧洲 奥尔德尼群岛(英国)根西岛(英国) 爱尔兰马恩岛(英国) 泽西岛(英国) 塞浦路斯 马耳他 英国 非洲 博茨瓦纳肯尼亚 莱索托 马拉维 毛里求斯莫桑比克 纳米比亚(1918) 塞舌尔 南非 斯威士兰 坦桑尼亚 乌干达 赞比亚 津巴布韦 索马里兰
美洲 安圭拉(英)安提瓜和巴布达巴哈马 巴巴多斯 百慕大(英)开曼群岛(英)多米尼克福克兰群岛(英) 格林纳达 圭亚那 牙买加 蒙特塞拉特(英) 圣赫勒拿(英) 圣基茨和尼维斯 圣卢西亚 圣文森特和格林纳丁斯 苏里南 特立尼达和多巴哥 特克斯和凯科斯群岛(英) 英属维尔京群岛(英) 美属维尔京群岛 大洋洲 澳大利亚 圣诞岛(澳) 科科斯群岛(澳)库克群岛(新西兰)斐济 基里巴斯瑙鲁(1918) 新西兰 纽埃(新西兰) 诺福克岛(澳) 巴布亚新几内亚 皮特凯恩群岛(英) 所罗门群岛 托克劳(新西兰) 汤加 图瓦卢 萨摩亚(2009) _________________________________________________________
?舵机的工作原理: 控制信号由接收机的通道进入信号调制芯片, 获得直流偏置电压。它内部有一个 基准电路,产生周期为20ms 宽度为1.5ms 的基准信号,将获得的直流偏置电 压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动 芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转, 使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理, 知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管 或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 ?舵机的控制: 舵机的控制一般需要一个20ms 的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms 范围内的角度控制脉冲部分。以180度角度舵机为例,那么对应的 控制关系是这样的: 0.5ms --------- 0 度; 1.0ms --- ——45 度; 1.5ms --- ——90 度; 2.0ms --- ?——135 度; 2.5ms --- —180 度; 请看下形象描述吧 ?舵机的工作电压和电流: 0 015 1.0 1 5 2 0 2.5 ms torobot TR213
每一款舵机都有自己的参数,如TR213舵机的工作电压是4.8-7.2V , TR205舵机的工作电压是4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。 舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电 流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。 ?舵机三根线的区分: 地线电源正极信号线 信号线接单片机I/O 口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/O 口直接控制; 电源正极,接输入电源的正极; 地线,接输入电源的负极; 备注:如果控制部分和电源部分是分开的,两者一定要共地。
舵系安装通用工艺 G21-LR1
舵系安装通用工艺目录 序: 舵系安装通用工艺说明 一: 舵系中心线找中应具备的条件 二: 舵系中心线的找中 三: 舵系镗孔 四: 舵系衬套的加工及安装 五: 舵杆玻璃钢包覆工艺 六: 舵系的安装 七: 舵“零”位及舵叶灵活性检查 八:悬式平衡舵的安装说明 九:下水前的工作
舵系安装通用工艺说明: 本工艺通用于我厂目前建造的各类内河、沿海使用的中、小型船舶。 舵系结构为:设有舵销承座的普通平衡舵、设有导流管的普通平衡舵及悬式平衡舵。 舵系数量为:单舵或多叶舵;操舵装臵为:手操、液压推舵等型式。 由于各建造船舶产品的舵系结构和特点不同,有本工艺顾及不到的特殊之处,车间工艺股应根据施工船舶产品特点的个性,制订补充工艺(其中包括工艺布臵图、舵系拉线图、舵系镗孔图等)以完善建造船舶的舵系安装工艺,但舵系安装的主要顺序,方法及技术要 1.舵系船台焊接工作结束。上舵承本体(舵杆套筒)或舵托应全部装配完工,船体密性泵水报验合格。 2.舵系中心位臵及尺寸已确定,应符合图纸要求,并经报验合格。 3.上舵承座面板平行于基线。距基线的理论尺寸应符合要求,且上舵承座面板应留有镗削余量≥5mm。 4.下舵承本体,舵销承座内孔,均应留有镗削余量。 5.轴系中心线已测定。 6.舵系找中及安装期间,应停止一切振动性作业。
二:舵系中心线的找中: 1.上基准点:可在舵机舱顶部,亦可在舵机平台甲板舵中心线上方,设臵可调拉线支架 一具。 2.基准点:在舵销承座下方约800~1000mm处,焊装钢性支架,并在其上设臵可调节拖 板。 悬式平衡舵系可在船台地面设臵刚性支架,亦可不设下基准点,利用钢丝挂重划线。 或者将已加工内孔的下舵承本体直接装焊于船体上。 3.通过上基准点和下调节拖板拉线,采用φ0.8mm的琴钢丝,挂重60kg,钢丝应平直, 清洁和无扭曲,调节上、下基准,使其中心与舵系中心线同轴。 4.拉舵线与拉轴线应同时进行,其舵中心线位臵应符合图纸要求: 1)舵系中心线与轴系中心线的相对位臵偏差,每米不得大于1mm(即角度偏差<4′) (见图示) 2)舵系中心线与轴系中心线的相对位臵偏差,不得超过下式计算数值: δ=0.001 3 L ,L Array 3) 均不应大于5~10mm 5. 偏移及镗孔余量。 6. 镗削余量。 7. 上舵承座镗削平面至基线距离h 舵销承座镗削平面至基线距离,应符合图纸要求。 8.舵杆实际加工长度的确定: 测量记录舵销承座镗削平面及下舵承座端面至上舵承座镗削平面的实际距离尺寸,与 图纸相应位臵的理论尺寸来确定舵杆加工的实际长度,供机加车间加工。
常用的标准舵令
常用的標準舵令 ORDER 舵令意義 Midships 正舵舵保持在船首尾線位置上。 Port five 左舵五操左舵5度。 Port ten 左舵十操左舵10度。 Port fifteen 左舵十五操左舵15度。 Port twenty 左舵二十操左舵20度。 Port twenty-five 左舵二十五操左舵25度。 Hard-a-port 左滿舵操舵至最左位置。 Starboard five 右舵五操右舵5度。 Starboard ten 右舵十操右舵10度。 Hard-a-starboard 右滿舵操舵至最右位置。 Ease to five 回到五把舵角回到5度並保持5度 Ease to ten 回到十把舵角回到10度並保持10度。 Steady 把定儘快減少船舶偏轉。 Keep buoy/mark/beacon /…on port/ starboard side 把浮標/標誌/立標/……放在左/右舷。 Steady as she goes 照直走將舵把定在叫舵令時羅經所指的船首向,舵工須複誦舵令並報告受令時的羅經航向。當船舶把定在該船首向時,舵工須報告“steady on…(把定在……。)” Finish with wheel 完舵。 除上表標準舵令外,以下舵令用得也較多: “Port/Starboard a little”——————————————“左/右舵一點” “Port/ Starboard easy”——————————————“左/右舵慢”“Ease the wheel”—————————————————“回舵” “Nothing to port/starboard”—————————————“不要偏左/右”“How answer?”—————————————————“舵靈嗎?” “How is the steering?”——————————————“舵靈嗎?”“Answers all right”————————————————“舵很靈” “Answers too slow”————————————————“反應很慢” “No steering/Steerage”———————————————“舵不靈” “What rudder?”—————————————————“舵角多少” “Port/Starboard rudder a bit sluggish”—————————“左/右舵有點遲緩”“Meet her (the wheel)”———————————————“壓舵” 按航向(羅經)操舵舵令: “Steer 150°”———————————————————“走150度”“Course 275°”——————————————————“走275度”“steer one eight two”————————————————“操182度”“Steady on one eight two”——————————————“把定在182o”“Course again”——————————————————“航向復原”
目录 一.舵机PWM信号介绍 (1) 1.PWM信号的定义 (1) 2.PWM信号控制精度制定 (2) 二.单舵机拖动及调速算法 (3) 1.舵机为随动机构 (3) (1)HG14-M舵机的位置控制方法 (3) (2)HG14-M舵机的运动协议 (4) 2.目标规划系统的特征 (5) (1)舵机的追随特性 (5) (2)舵机ω值测定 (6) (3)舵机ω值计算 (6) (4)采用双摆试验验证 (6) 3.DA V的定义 (7) 4.DIV的定义 (7) 5.单舵机调速算法 (8) (1)舵机转动时的极限下降沿PWM脉宽 (8) 三.8舵机联动单周期PWM指令算法 (10) 1.控制要求 (10) 2.注意事项 (10) 3.8路PWM信号发生算法解析 (11) 4.N排序子程序RAM的制定 (12) 5.N差子程序解析 (13) 6.关于扫尾问题 (14) (1)提出扫尾的概念 (14) (2)扫尾值的计算 (14)
一.舵机PWM 信号介绍 1.PWM 信号的定义 PWM 信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。 目前,北京汉库的HG14-M 舵机可能是这个过渡时期的产物,它采用传统的PWM 协议,优缺点一目了然。优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM 格式。 但是它是一款数字型的舵机,其对PWM 信号的要求较低: (1) 不用随时接收指令,减少CPU 的疲劳程度; (2) 可以位置自锁、位置跟踪,这方面超越了普通的步进电机; 其PWM 格式注意的几个要点: (1 ) 上升沿最少为0.5mS ,为0.5mS---2.5mS 之间; (2) HG14-M 数字舵机下降沿时间没要求,目前采用0.5Ms 就行;也就是说PWM 波形可以是一个周 期1mS 的标准方波; (3) HG0680为塑料齿轮模拟舵机,其要求连续供给PWM 信号;它也可以输入一个周期为1mS 的标 准方波,这时表现出来的跟随性能很好、很紧密。 图1-1
舵系布置图设绘通则
1 主题内容与适用范围 1.1本标准规定了普通流线型舵“舵系布置图”的设绘依据、基本要求、内容要点、图面要求、注意事项、校审要点、质量要求以及附录。 1.2本标准适用于详细设计阶段的"舵系布置图"设绘。技术设计、施工设计亦可参照采用。 2 引用标准及设绘依据图纸 2.1 引用标准 下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。本标准出版时,所示版本均为有效,所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。 2.2 设绘依据图纸 a)设计任务书或技术规格书; b)船体说明书; c) 总布置图; d) 型线图; e) 尾部结构图; f) 尾柱图; g) 舵设备计算书; h) 舵机图; i) 舵机舱布置图。 3 基本要求 3.1 详细设计的舵系布置图,应按总布置图及舵设备计算书以及设计任务书对舵的数量及型式的要求绘制。图上应明确地表示出舵叶的外形尺寸,舵杆的外形尺寸及连接方式(包括上、下舵承,上、下舵销等),以及舵杆在舵机平台上的布置位置。 3.2 图纸还要画上舵杆与舵柄的联接方式,因为联接方式涉及零件舵杆图的设计。 3.3 图上还应标注出各零部件的外形尺寸及其装配关系,绘制出各联接部件的节点图,供设绘舵系另部件图之用,并作为供船东和船检审查的图样之一。
3.4 目前我院设计的大部分船舶舵的数量与螺旋桨数量相同(舵的型式大多采用悬挂式舵和挂舵臂舵,另外还有襟翼舵)。 3.5 舵与螺旋桨的纵向距离一般不应防碍螺旋桨拆装要求,纵向距离一般为1/4~1/2D(D—螺旋桨直径)。舵叶中心大多与螺旋桨中心的垂向距离二者接近一致为佳,若有偏移在0.1D范围内。 3.6 舵设计时要考虑舵维修时舵杆与舵叶的拆装方便性,另外还要考虑保证舵叶的水密性。 4 内容要点 4.1 应绘制出整个舵系的布置位置,以装配图的形式表示出整个舵系的所有零部件,并进行编号列入材料表内,注明相应的图号或标准号,有特殊要求的场合应加以说明。 4.2应注明上述零件的配合尺寸,定位尺寸或主要外形尺寸。 4.3 为了清楚地表明舵机的相对位置以及与上述另部件的传动关系,本图中也可把舵机绘入,但需注意重量、安装位置、型号等不要与“舵机舱布置图”相违或重复。 5 图面要求 5.1 图纸幅面应符合GB4476-84金属船体制图的要求。 5.2 图中主要位置应绘出舵系的整个侧视图,绘制双舵时,建议增绘尾部舵杆中心线处的横剖面视图,以观察舵叶从一舷最大舵角转至另一舷最大舵角后,是否与船体外板相碰。以及下舵承体是否与船体有效联接。对上、下舵承、上、下舵销等重要部位设局部放大图。布图时应注意图面布局的匀称和合理。 5.3 常用比例:一般采用1:10,1:20,1:25,1:5。 5.4 线条 凡属本图的零部件用粗实线表示,尾部船体轮廓、舵机甲板或平台、舱壁、尾柱、挂舵臂、舵踵等用细双点划线表示,船体中心线、基线及件号引出线用细实线表示。 5.5尺寸标注 图中各配合面应标注配合尺寸,如舵杆与上舵承和下舵承的公差及配合尺寸,以及舵销与舵叶铸钢件等的公差及配合尺寸。重要的零
道路通行方向(汽车左舵和汽车右舵)道路通行方向是世界各国交通规则中的一个重要内容,它规定了车辆在道路上的行驶方位,避免出现混乱和事故。 道路通行方向可分为车辆靠道路左侧行驶和靠道路右侧行驶两类。34%的国家靠左行驶,66%的国家靠右行驶。如果按道路里程计算,全世界28%的可通行道路是靠左行驶的,72%靠右行驶。 靠左侧行驶的国家和地区列表:(右舵) 亚洲:注:括号中的数字为转换至左侧行驶的年份 孟加拉印度巴基斯坦 不丹印度尼西亚新加坡 文莱日本(冲绳1978)斯里卡兰 东帝汶(1928-1976靠 马来西亚泰国 右通行) 香港马尔代夫尼泊尔 澳门 欧洲: 奥尔德尼群岛(英)马恩岛(英)马耳他 根西岛(英国)泽西岛(英)英国 爱尔兰塞浦路斯 非洲: 博茨瓦纳莫桑比克但桑尼亚 肯尼亚纳米比亚(1918)乌干达
莱索托塞舌尔赞比亚 马拉维南非津巴布韦 毛里求斯斯威士兰索马里兰 美洲: 安圭拉(英)福克兰群岛(英)圣卢西亚 安提瓜和巴布达格林纳达圣文特和格林纳丁斯 巴哈马圭亚那苏里南 巴巴多斯牙买加特立尼达和多巴哥 百慕大(英)梦特兰斯特(英)特克斯和凯科斯群岛 (英) 开曼群岛(英)圣赫勒拿(英)英属维尔京群岛(英)多米尼克圣基茨和尼维斯美属维尔京群岛 大洋洲: 澳大利亚瑙鲁(1918)皮特凯恩群岛(英) 圣诞岛(澳)新西兰所罗门群岛 科科斯群岛(澳)纽埃(新西兰)托克劳(新西兰) 库克群岛(新西兰)诺福克岛(澳)汤加 斐济巴布亚新几内亚图瓦卢 基里巴斯萨摩亚(2009) 靠左侧行驶的国家和地区列表:(左舵) 亚洲:注:括号中的数字为转换至左侧行驶的年份 中华人民共和国中国台湾(1946)阿塞拜疆
舵减摇装置的发展 舵减摇是基于正确利用下述两条规律发展起来的: 在操舵时,舵除产生一个使舰船转向的艏摇力矩以外,还产生一个横摇力矩; 一般舰船的艏摇响应周期大约是横摇固有周期的一倍左右。 舵减摇装置可以在控制操舵系统完成保持航向功能的同时,还能进行更高频率(舰船横摇固有频率附近)的操舵,使舵产生横摇力矩而不影响舰船的正常航行。 与鳍减摇装置相比,舵减摇装置具有造价低、所占船内空间小、使用和维修方便,以及便于对原来没有配备减摇控制装置的现役舰船进行加装改造等优点。 早在1972年,就有人探讨了用舵作为稳定装置的可能性,并在一艘商船上试验成功。 早期美国舰船一般都不采用减摇鳍。后来为了提高舰船在风浪中的特殊作业功能(例如直升机的起降作业,保持拖曳线列阵有尽可能多的时间正常工作,以及补给作业等),设法寻找提高舰船耐波性的途径才考虑安装减摇装置。利用原有的舵机作为执行机构,加上相应的控制器达到减小横摇的目的,无疑是一个极好的可行的方案。1974年美国泰勒舰船研究发展中心(DTNSRDC)开始研究在军舰上安装减摇装置的可能性,并研制了两台样机。主要设计思想是: 供舰船作业期间短期使用(半小时左右)。 将舵减摇系统和自动驾驶仪分成两个独立的系统,简化舵减摇装置的设计与制造。 在使用舵减摇时,用人工操舵保持航向,一旦舵减摇装置发生故障,便可转换到自动舵。控制原理是采用了有自适应性的角速度模拟控制。这两台样机分别安装在两艘115米长、30 00吨的哈密尔顿级巡逻舰上,于1976年和1979年进行了海上试验。在横浪中,当有义波高为2.14~2.44米,航速为14节时,横摇角有义值从4.83度减小到2.45度,减摇效果达49.3%,此外横荡加速度也有所减小。 早期的舵减摇装置都是采用控制规律简单的模拟系统,鉴于当时技术水平,不可能实现更为复杂的控制规律,加之舰船原有舵机性能的限制,因此减摇效果不总是那么理想。1986年至1987年美国泰勒舰船研究发展中心和海军科技部又相继推出第一代和第二代数控舵减摇装置,第一代是利用原有舵机加上数字控制器使减摇性能又有提高。第二代不仅采用了数字控制器而且配上了为舵减摇而专门研制的新舵机,使减摇效果大幅度提高,甚至达到70%的减摇水平。由于原来的舵机操舵角速度只能在4度/秒以下,为了增大减摇力矩,如果舵机允许操舵角速度大于8度/秒,则舵减摇装置的性能将会有明显提高。另外,新研制的舵机将满足功率、结构载荷以及对磨损等新的要求。美国已经在斯普鲁恩斯级上进行了成功的试验,并研制了在航母上采用的舵减摇装置。 在美国获得试验成功的鼓舞下,80年代荷兰、瑞典等国也开展了舵减摇装置的研究。1984年瑞典哥德堡船模试验水池(SSPA)着首研制型号为ROLL-NIX的舵减摇装置。1987年在瑞典皇家海军两艘舰艇上进行了试验。一艘为巡逻艇(艇长35米,排水量170吨,航速27节),一艘为布雷舰(舰长105米,排水量3300吨,航速16节)。舵机速度都是8度/秒,在蒲氏风级4~6级的横浪和尾斜浪中减摇效果达40~60%。ROLL-NIX采用了基于现代控制理论的自适应滤波器和调节器,可适应海况和航速的变化。它的硬件有摩托罗拉MC 68000微机、角速度陀螺、自动舵控制、ROLL-NIX控制和电源控制器。共组成两个部件:主设备和控制单元。主设备约重12千克,体积约为0.5×0.2×0.3立方米。控制单元重约13千克,体积约为0.2×0.1×0.1立方米。可将它用于对现役舰船的原操舵装置进行改装,也可用于新船建造,只要1到2天就可以完成安装和调试。该装置利用微机对信号进行数字滤波,提高了控制质量。它也兼有航向自适应操舵仪的功能,在启用舵减摇时可任意选择用手舵和自动舵保持航向。当要求改变航向时,减摇控制会自动脱开。待进入指定方位后马上又
FUTABA舵机参数大全 S9150 Digital servo 尺寸:47.5X27X25.3mm 重量:53g 速度:0.18sec/60"(4.8V) 扭力:5.8kg:cm(4.8V) ——————————————————————————S9151 Digital servo 尺寸:40X20X36.6mm 重量:50g 速度:0.19sec/60"(4.8V) 扭力:9.5kg:cm(4.8V) ——————————————————————————S9206 尺寸:40.5X20X37.5mm 重量:53g 速度:0.19sec/60"(4.8V) 扭力:9.5kg:cm(4.8V) ——————————————————————————S9601 尺寸:31X16X30.2mm 重量:31g 速度:0.15sec/60"(4.8V) 扭力:2.4g:cm(4.8V) ——————————————————————————S9250 Digital servo 尺寸:40.5X20X37.5mm 重量:54g 速度:0.11sec/60"(4.8V) 扭力:5.5kg:cm(4.8V) ——————————————————————————S9253 Digital servo 尺寸:40X20X36.6mm 重量:49g 速度:0.08sec/60"(4.8V) 扭力:2.0kg:cm(4.8V) ——————————————————————————S3103 尺寸:21.8X11X19.8mm 重量:9.5g 速度:0.11sec/60"(4.8V) 扭力:1.2kg:cm(4.8V)
舵系安装工艺规范 前言 1 范围 本规范规定了舵系安装的施工前准备、人员、工艺要求、工艺过程和检验。 本规范适用于大型钢质海船的半悬挂舵系的安装,其他类型的舵系安装,可参照使用。 2 术语和定义 2.1 挂舵臂 指支撑半悬挂舵臂状构件。 2.2 半悬挂舵 指舵的上半部,支撑于挂舵臂处的舵钮(销)上,下半部悬挂的舵。 2.3 舵叶 指舵上产生舵压力的主体部分。 2.4 舵钮 指挂舵臂等后缘供装舵销用的突出部分。 2.5 舵销 指用以将舵连接在挂舵臂上的销轴或螺栓。一般制成锥状体,按其部位和作用不同,分别称为上舵销和下舵销。 2.6 舵杆连接法兰 指舵杆下端与舵杆垂直,用于和舵叶相连接的安装面。 2.7 舵杆 指连接舵叶和舵机或舵柄,传递转舵钮距的转动杆件。 2.8 上舵承 指位于舵头处用来支撑舵的重量,及其所受到的径向和轴向力的舵承。 2.9 上舵承基座 支撑上舵承的构件。 2.10 舵系中心线 指舵杆中心线及其延长线。 2.11 轴系中心线 指按装螺旋桨的轴系中心线及其延长线。 3 舵系安装的准备 3.1 图纸 a) 舵系布置图; b) 舵杆; c) 上、下舵钮衬套; d) d) 上舵承座;
e) e) 上舵承; f) f) 舵杆上螺栓及螺母; g) g) 舵柄安装图、舵机安装图; h) h) 其他。 3.2 场地 清除船舶艉部安装舵叶处周围的杂物垃圾,在液压小车轨道附近,凡妨碍液压小车运作的脚手架应拆除,工作场所附近应有足够的照明,除了有固定的照明设备外,还应装有足够的可移动的照明设备。 4 人员 4.1 安装人员和检验人员,应具备专业知识,并经过专业培训,考核合格后方可上岗。 4.2 安装人员和检验人员,应预先阅读与本系统有关的图纸,若有问题,应预先向有关部门提出,求得解决。 4.3 安装人员和检验人员,应熟悉本规范要求,严格遵守工艺纪律和安全操作规程。 5工艺要求 5.1 舵系统安装应在船体尾部结构装焊工作、火工工作、密性试验完毕后进行。 5.2 应掌握舵杆及舵叶完工后的实际尺寸,以作施工依据。(可利用质检部门的验收报告)。 5.3 舵系中心线拉线应与轴系中心线拉线同时进行,应在船体不受阳光曝晒的情况下施工。一般以清晨,傍晚为宜。拉线时应停止一切会产生振动的作业。 5.4 拉线时,舵系的基准点应经检验认可。 5.5 调整后舵系与轴系相交一般偏差不大于3mm,允许极限不大于8mm。 5.6 舵系孔在船台上或船坞内经机械加工成品后,各孔中心与舵系中心线偏差不大于 0.3mm。允许极限不大于0.5mm。 5.7 舵与舵杆连接后的中心偏差不大于0.25mm,允许极限不大于0.5mm。 5.8 舵与舵杆的连接铰孔螺栓,过盈量为0.005~0.015mm,极限应大于0,可采用冷冻装配,或者压入装配法来进行装配。 5.9 舵与舵杆连接处的螺栓孔圆度不大于0.01,螺栓孔圆柱度不大于0.02,螺栓圆度不大于0.01,螺栓圆柱度不大于0.02。 5.10 装在舵纽处的衬套当用合成材料时,其过盈量应根据制造商的计算来确定。其压入力的计算,冷冻要求及其他工艺要求,均由制造商来确定。如用不锈钢或青铜,其过盈量 d1—d2 均为0~0.05mm,d1为衬套外径,d2为舵纽内径。上述衬套在舵纽上安装时,由于有过盈的原因,所以一般采用液压压入方法,压入力应符合技术部门提供的要求。 5.11 上舵承铰孔螺柱过盈量为0~0.02mm。 5.12 上舵承与甲板基座接触面积之间应加密封胶。 5.13 上舵承基座的中心线应与舵杆中心线重合,上舵承基座的下端有余量,面板亦有机加工余量.在安装上舵承基座时应先测量舵机平台甲板至下舵销,下端面的尺寸,以便掌握该甲板
舵系安装工艺规范 1范围 本规范规定了舵系安装的施工前准备、人员、工艺要求、工艺过程和检验。 本规范适用于大型钢质海船的半悬挂舵系的安装,其他类型的舵系安装,可参照使用。 2术语和定义 2.1挂舵臂 指支撑半悬挂舵臂状构件。 2.2半悬挂舵 指舵的上半部,支撑于挂舵臂处的舵钮(销)上,下半部悬挂的舵。 2.3舵叶 指舵上产生舵压力的主体部分。 2.4舵钮 指挂舵臂等后缘供装舵销用的突出部分。 2.5舵销 指用以将舵连接在挂舵臂上的销轴或螺栓。一般制成锥状体,按其部位和作用不同,分别称为上舵销和下舵销。 2.6舵杆连接法兰 指舵杆下端与舵杆垂直,用于和舵叶相连接的安装面。 2.7舵杆 指连接舵叶和舵机或舵柄,传递转舵钮距的转动杆件。 2.8上舵承 指位于舵头处用来支撑舵的重量,及其所受到的径向和轴向力的舵承。 2.9上舵承基座 支撑上舵承的构件。 2.10舵系中心线
指舵杆中心线及其延长线。 2.11轴系中心线 指按装螺旋桨的轴系中心线及其延长线。 3舵系安装的准备 3.1图纸 a)舵系布置图; b)舵杆; c)上、下舵钮衬套; d)d) 上舵承座; e)e) 上舵承; f)f) 舵杆上螺栓及螺母; g)g) 舵柄安装图、舵机安装图; h)h) 其他。 3.2场地 清除船舶艉部安装舵叶处周围的杂物垃圾,在液压小车轨道附近,凡妨碍液压小车运作的脚手架应拆除,工作场所附近应有足够的照明,除了有固定的照明设备夕卜,还应装有足够的可移动的照明设备。 4人员 4.1安装人员和检验人员,应具备专业知识,并经过专业培训,考核合格后方可上岗。 4.2安装人员和检验人员,应预先阅读与本系统有关的图纸,若有问题,应预先向有关部 门提出,求得解决。 4.3安装人员和检验人员,应熟悉本规范要求,严格遵守工艺纪律和安全操作规程。 5工艺要求 5.1舵系统安装应在船体尾部结构装焊工作、火工工作、密性试验完毕后进行。 5.2应掌握舵杆及舵叶完工后的实际尺寸,以作施工依据。(可利用质检部门的验收报告)。 5.3舵系中心线拉线应与轴系中心线拉线同时进行,应在船体不受阳光曝晒的情况下施 工。一般以清晨,傍晚为宜。拉线时应停止一切会产生振动的作业。 5.4拉线时,舵系的基准点应经检验认可。 5.5调整后舵系与轴系相交一般偏差不大于 3mm,允许极限不大于8mm。 5.6舵系孔在船台上或船坞内经机械加工成品后,各孔中心与舵系中心线偏差不大于
机械设备技术协议——(MF025B) 船型:55000DWT散货船 船号:SG55000DWT 船级社: CCS 挂旗:中国 数量:1组/船 ITEM项目:舵系成组 制造商:东台市远洋船舶配件有限公司 会签: 认可资料:8套(带一个光盘)工作资料;8套(带一个光盘);完工资料4套(带一个光盘) 船厂: 江苏苏港造船有限公司(甲方) 详细设计:上海瀚顺船舶设计公司有限公司 供应商:东台市远洋船舶配件有限公司(乙方) 1 / 3
A. 通则: a. 本协议所提及的设备和材质应符合中国船级社(CCS)的最新规范2009和最新国际海上人命安全公约(SOLAS)及本船将悬挂的船籍国的相关要求; B. 基本技术说明: a. 环境温度:-20~+45℃ b. 入级符号:CCS c. 证书要求:1份正本和2份副本 d. 计量单位:ISO e. 产品应涂装到底漆 C. 图纸和文件: 买方将提供下列图纸和文件(CCS退审图)给卖方,卖方应根据以下图纸和文件的要求进行制造并按要求提供产品 1.舵系布置图:HS10013-022-013 2.舵杆上液压螺母:HS10013-022-013-01 3.舵杆:HS10013-022-015 4.舵杆下液压螺母:HS10013-022-013-06 5.舵销:HS10013-022-016 6.舵销液压螺母:HS10013-022-013-10 注:以上技术图纸和文件做为本技术协议的附件,是本技术协议不可分割的一部分; D. 供货及加工范围: 1.零件清单 2 / 3
2. 舵叶铸钢件的镗孔由乙方现场完成。 3. 舵杆与舵柄、舵杆与舵杆承座、舵销与舵销承座的拂配过程以及相关交验为乙方完成,成 品交验过程中,乙方必须根据船东、船检要求的质检过程召集船东、船检、船厂代表进行检验,同时完成相关记录。 4. 所有加工表面应光洁、无伤痕、无毛刺,键槽底部圆滑过渡。 E. 预安装、试验和检查 1.卖方应在产品检验过程节点完工前7天,通知买方代表和船东代表到场,作相应的检查。 2.产品检验过程节点: 2.1舵杆与舵柄的拂配; 2.2舵杆与舵杆承座的拂配; 2.3舵销与舵销承座的拂配; F. 质量保证 在船交付后,生产厂对其所供应的产品提供12个月的质量保证。 G.其它: 1.本协议正本两份,双方各执一份 2.本协议如有未尽事宜,双方应本着友好协商的原则妥善解决 3.违约罚款 4.制造商供给的设备或材料与工作图或完工资料不符,由此而引起的损失全部由制造商承担。 3 / 3
汽车左舵右舵国家列表文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-
道路通行方向(汽车左舵和汽车右舵)道路通行方向是世界各国交通规则中的一个重要内容,它规定了车辆在道路上的行驶方位,避免出现混乱和事故。 道路通行方向可分为车辆靠道路左侧行驶和靠道路右侧行驶两类。34%的国家靠左行驶,66%的国家靠右行驶。如果按道路里程计算,全世界28%的可通行道路是靠左行驶的,72%靠右行驶。 靠左侧行驶的国家和地区列表:(右舵) 亚洲:注:括号中的数字为转换至左侧行驶的年份 孟加拉印度巴基斯坦 不丹印度尼西亚新加坡 文莱日本(冲绳1978)斯里卡兰 东帝汶(1928-1976靠 马来西亚泰国 右通行) 香港马尔代夫尼泊尔 澳门 欧洲: 奥尔德尼群岛(英)马恩岛(英)马耳他 根西岛(英国)泽西岛(英)英国 爱尔兰塞浦路斯 非洲: 博茨瓦纳莫桑比克但桑尼亚 肯尼亚纳米比亚(1918)乌干达 莱索托塞舌尔赞比亚 马拉维南非津巴布韦 毛里求斯斯威士兰索马里兰 美洲: 安圭拉(英)福克兰群岛(英)圣卢西亚 安提瓜和巴布达格林纳达圣文特和格林纳丁斯 巴哈马圭亚那苏里南 巴巴多斯牙买加特立尼达和多巴哥 百慕大(英)梦特兰斯特(英)特克斯和凯科斯群岛
(英) 开曼群岛(英)圣赫勒拿(英)英属维尔京群岛 (英) 多米尼克圣基茨和尼维斯美属维尔京群岛 大洋洲: 澳大利亚瑙鲁(1918)皮特凯恩群岛(英)圣诞岛(澳)新西兰所罗门群岛 科科斯群岛(澳)纽埃(新西兰)托克劳(新西兰) 库克群岛(新西兰)诺福克岛(澳)汤加 斐济巴布亚新几内亚图瓦卢 基里巴斯萨摩亚(2009) 靠左侧行驶的国家和地区列表:(左舵) 亚洲:注:括号中的数字为转换至左侧行驶的年份 中华人民共和国中国台湾(1946)阿塞拜疆 巴林(1968)英属印度洋领地柬埔寨 阿富汗格鲁吉亚关岛(美) 伊朗伊拉克以色列 约旦哈萨克斯坦科威特 朝鲜韩国(1946)吉尔吉斯斯坦 老挝黎巴嫩蒙古 缅甸(1970)阿曼菲律宾(1946) 帕劳卡塔尔沙特阿拉伯 叙利亚亚美尼亚塔吉克斯坦 土耳其土库曼斯坦阿拉伯联合酋长国 乌兹别克斯坦越南也门 欧洲: 阿兰群岛(芬兰)阿尔巴尼亚安道尔 奥地利(1935—38)白俄罗斯比利时 保加利亚克罗地亚 波斯尼亚和黑塞哥维 纳 捷克(1939)爱沙尼亚芬兰(1858) 法国德国直布罗陀(英) (1929) 希腊梵蒂冈匈牙利(1941) 冰岛(1968)意大利拉脱维亚 列支敦士登立陶宛卢森堡 马其摩尔多瓦摩纳哥