- 252 -
第9章 小波变换基础
9.1 小波变换的定义
给定一个基本函数)(t ψ,令 )(
1)(,a
b t a
t b a -=
ψψ (9.1.1)
式中b a ,均为常数,且0>a 。显然,)(,t b a ψ是基本函数)(t ψ先作移位再作伸缩以后得到的。若b a ,不断地变化,我们可得到一族函数)(,t b a ψ。给定平方可积的信号)(t x ,即
)()(2
R L t x ∈,则)(t x 的小波变换(Wavelet Transform ,WT )定义为
dt a
b t t x a
b a WT x )(
)(1),(-=?
*
ψ
??==
?*
)(),()()(,,t t x dt t t x b a b
a ψψ
(9.1.2)
式中b a ,和t 均是连续变量,因此该式又称为连续小波变换(CWT )。如无特别说明,式中及以后各式中的积分都是从∞-到∞+。信号)(t x 的小波变换),(b a WT x 是a 和b 的函数,
b 是时移,a 是尺度因子。)(t ψ又称为基本小波,或母小波。)(,t b a ψ是母小波经移位和
伸缩所产生的一族函数,我们称之为小波基函数,或简称小波基。这样,(9.1.2)式的WT 又可解释为信号)(t x 和一族小波基的内积。
母小波可以是实函数,也可以是复函数。若)(t x 是实信号,)(t ψ也是实的,则
),(b a WT x 也是实的,反之,),(b a WT x 为复函数。
在(9.1.1)式中,b 的作用是确定对)(t x 分析的时间位置,也即时间中心。尺度因子
a 的作用是把基本小波)(t ψ作伸缩。我们在1.1节中已指出,由)(t ψ变成)(a
t
ψ,当1
>a 时,若a 越大,则)(a
t
ψ的时域支撑范围(即时域宽度)较之)(t ψ变得越大,反之,当1
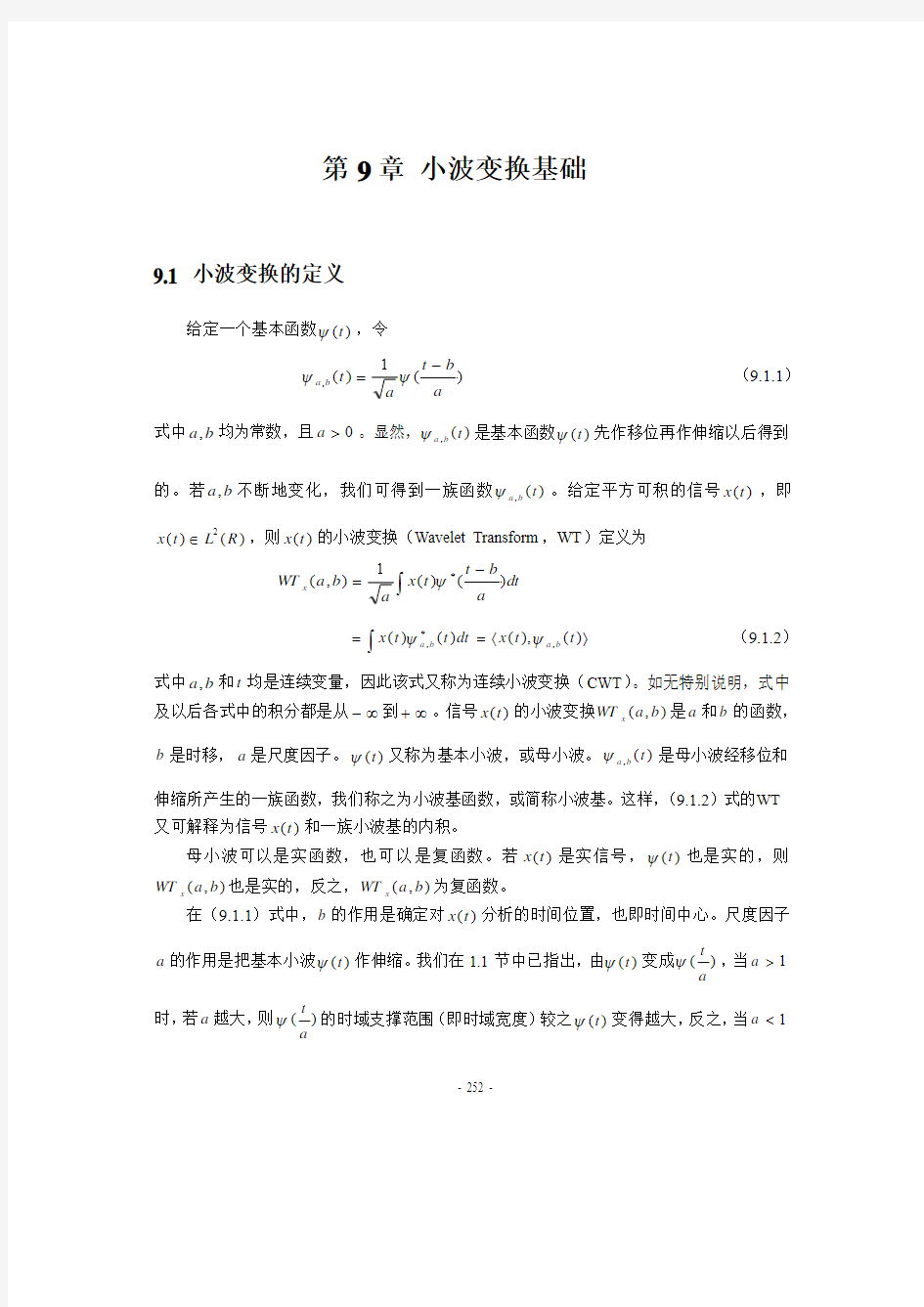
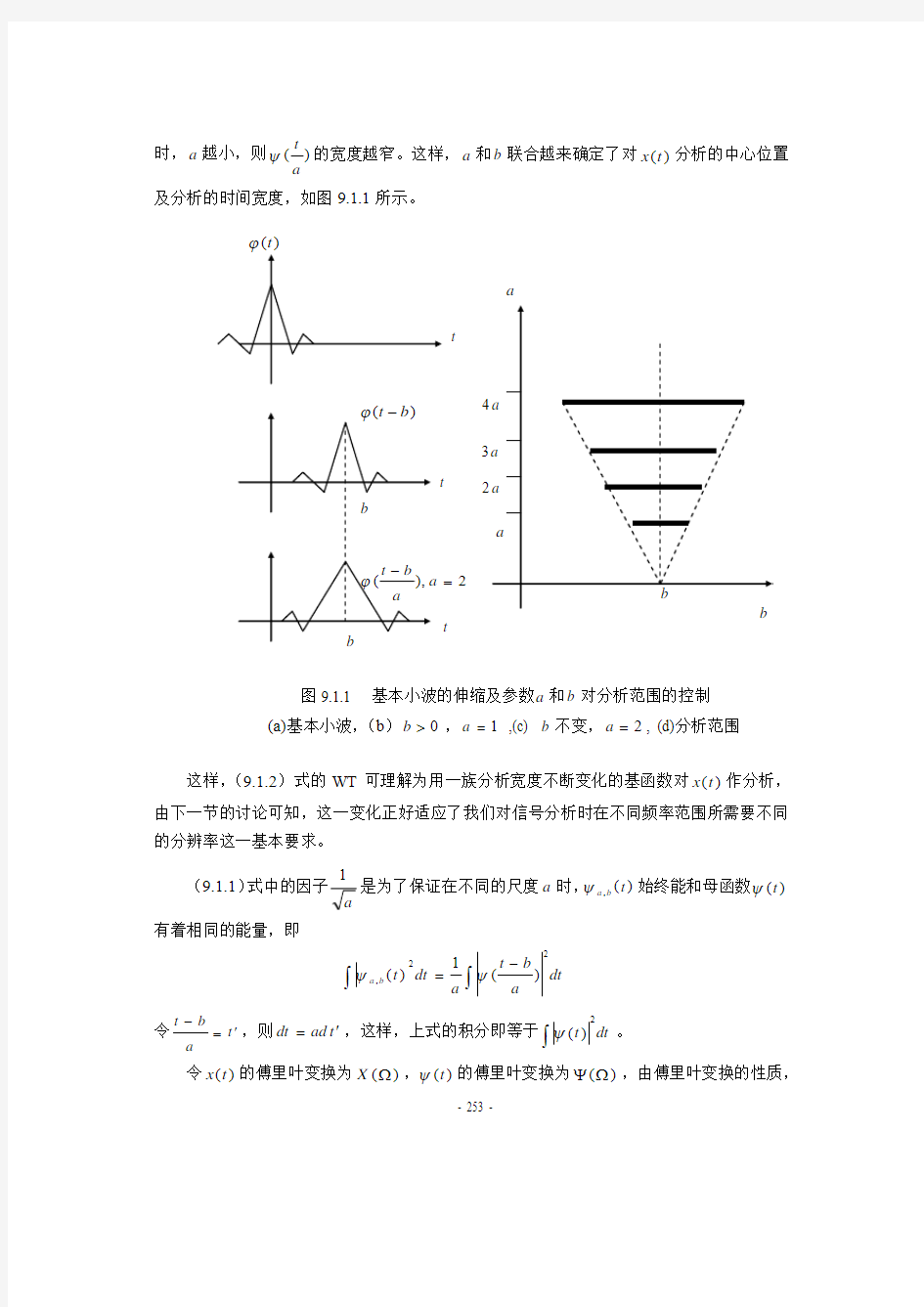
- 253 - 时,a 越小,则)(a t ψ的宽度越窄。这样,a 和b 联合越来确定了对)(t x 分析的中心位置 及分析的时间宽度,如图9.1.1所示。 图9.1.1 基本小波的伸缩及参数a 和b 对分析范围的控制 (a)基本小波,(b )0>b ,1= a ,(c) b 不变,2=a , (d)分析范围 这样,(9.1.2)式的WT 可理解为用一族分析宽度不断变化的基函数对)(t x 作分析,由下一节的讨论可知,这一变化正好适应了我们对信号分析时在不同频率范围所需要不同的分辨率这一基本要求。 (9.1.1)式中的因子a 1是为了保证在不同的尺度a 时, )(,t b a ψ始终能和母函数)(t ψ有着相同的能量,即 dt a b t a dt t b a 2 2 ,)( 1)(??-= ψψ 令 t a b t '=-,则t ad dt '=,这样,上式的积分即等于dt t 2 )(?ψ。 令)(t x 的傅里叶变换为)(ΩX ,)(t ψ的傅里叶变换为)(Ωψ,由傅里叶变换的性质, 2 =t t t a - 254 - )(,t b a ψ的傅里叶变换为: )( 1)(,a b t a t b a -= ψψ ? b j b a e a a Ω-Ωψ= Ωψ)()(, (9.1.3) 由Parsevals 定理,(9.1.2)式可重新表为: >ΩψΩ<= )(),(21),(,b a x X b a WT π ? ∞ +∞ -Ω*ΩΩψΩ=d e a X a b j )()(2π (9.1.4) 此式即为小波变换的频域表达式。 9.2 小波变换的特点 下面,我们从小波变换的恒Q 性质、时域及频率分辨率以及和其它变换方法的对比来讨论小波变换的特点,以帮助我们对小波变换有更深入的理解。 比较(9.1.2)和(9.1.4)式对小波变换的两个定义可以看出,如果)(,t b a ψ在时域是有限支撑的,那么它和)(t x 作内积后将保证),(b a WT x 在时域也是有限支撑的,从而实现我们所希望的时域定位功能,也即使),(b a WT x 反映的是)(t x 在b 附近的性质。同样,若 )(,Ωψb a 具有带通性质,即)(,Ωψb a 围绕着中心频率是有限支撑的,那么)(,Ωψb a 和) (ΩX 作内积后也将反映)(ΩX 在中心频率处的局部性质,从而实现好的频率定位性质。显然,这些性能正是我们所希望的。问题是如何找到这样的母小波)(t ψ,使其在时域和频域都是有限支撑的。有关小波的种类及小波设计的问题,我们将在后续章节中详细讨论。 由1.3节可知,若)(t ψ的时间中心是0t ,时宽是t ?,)(Ωψ的频率中心是0Ω,带宽是Ω?,那么)(a t ψ的时间中心仍是0t ,但时宽变成t a ?,)(a t ψ的频谱)(Ωψa a 的频率中 心变为a 0/Ω,带宽变成a /Ω?。这样,)(a t ψ的时宽-带宽积仍是Ω??t ,与a 无关。这 一方面说明小波变换的时-频关系也受到不定原理的制约,但另一方面,也即更主要的是揭示了小波变换的一个性质,也即恒Q 性质。定义 0Q Ω?=Ω/=带宽/中心频率 (9.1.5) - 255 - 为母小波)(t ψ的品质因数,对)(a t ψ,其 带宽/中心频率= Q a a 00=Ω?=Ω?ΩΩ/// 因此,不论a 为何值)0(>a ,)(a t ψ始终保持了和)(t ψ具有性同的品质因数。恒Q 性质 是小波变换的一个重要性质,也是区别于其它类型的变换且被广泛应用的一个重要原因。图9.2.1说明了)(Ωψ和)(Ωψa 的带宽及中心频率随a 变化的情况。 图9.2.1 )(Ωψa 随a 变化的说明;(a) 1=a ,(b) 2= a ,(c) 2/1=a 将图9.1.1和图9.1.2结合起来,我们可看到小波变换在对信号分析时有如下特点:当a 变小时,对)(t x 的时域观察范围变窄,但对)(ΩX 在频率观察的范围变宽,且观察的中心频率向高频处移动,如图9.2.1c 所示。反之,当a 变大时,对)(t x 的时域观察范围变宽,频域的观察范围变窄,且分析的中心频率向低频处移动,如图9.2.1b 所示。将图9.1.1和9.2.1所反映的时-频关系结合在一起,我们可得到在不同尺度下小波变换所分析的时宽、带宽、时间中心和频率中心的关系,如图9.2.2所示。 图9.2.2 a 取不同值时小波变换对信号分析的时-频区间 ()Ωψ Ω Ω ()Ωψa 0 Ω 2Ω2 /0Ω0 Ω)2/1(=a ) 1(=a ) 2(=a /2 t ? - 256 - 由于小波变换的恒Q 性质,因此在不同尺度下,图9.2.2中三个时、频分析区间(即三个矩形)的面积保持不变。由此我们看到,小波变换为我们提供了一个在时、频平面上可调的分析窗口。该分析窗口在高频端(图中02Ω处)的频率分辨率不好(矩形窗的频率边变长),但时域的分辨率变好(矩形的时间边变短);反之,在低频端(图中20/Ω处),频率分辨率变好,而时域分辨率变差。但在不同的a 值下,图9.2.2中分析窗的面积保持不变,也即时、频分辨率可以随分析任务的需要作出调整。 众所周知,信号中的高频成份往往对应时域中的快变成份,如陡峭的前沿、后沿、尖脉冲等。对这一类信号分析时则要求时域分辨率要好以适应快变成份间隔短的需要,对频域的分辨率则可以放宽,当然,时、频分析窗也应处在高频端的位置。与此相反,低频信号往往是信号中的慢变成份,对这类信号分析时一般希望频率的分辨率要好,而时间的分辨率可以放宽,同时分析的中心频率也应移到低频处。显然,小波变换的特点可以自动满足这些客观实际的需要。 总结上述小波变换的特点可知,当我们用较小的a 对信号作高频分析时,我们实际上是用高频小波对信号作细致观察,当我们用较大的a 对信号作低频分析时,实际上是用低频小波对信号作概貌观察。如上面所述,小波变换的这一特点即既符合对信号作实际分析时的规律,也符合人们的视觉特点。 现在我们来讨论一下小波变换和前面几章所讨论过的其它信号分析方法的区别。 我们知道,傅里叶变换的基函数是复正弦。这一基函数在频域有着最佳的定位功能(频域的δ函数),但在时域所对应的范围是∞-~∞+,完全不具备定位功能。这是FT 的一个严重的缺点。 人们希望用短时傅里叶变换来弥补FT 的不足。重写(2.1.1)式,即 ?Ω-* -= Ωdt e t g x t STFT t j x )()(),(ττ ??-?== Ω* τ τ τττττj t e t g x d g x )(),()()(, (9.2.6) 由于该式中只有窗函数的位移而无时间的伸缩,因此,位移量的大小不会改变复指数τ Ω-j e 的频率。同理,当复指数由τ Ω-j e 变成τ Ω-2j e (即频率发生变化)时,这一变化也不会影 响窗函数)(τg 。这样,当复指数τ Ω-j e 的频率变化时,STFT 的基函数)(,ττt g 的包络不会 改变,改变的只是该包络下的频率成份。这样,当Ω由0Ω变化成02Ω时,)(,ττt g 对)(τx 分析的中心频率改变,但分析的频率范围不变,也即带宽不变。因此,STFT 不具备恒 Q - 257 - 性质,当然也不具备随着分辨率变化而自动调节分析带宽的能力,如图9.2.3所示。图中T t e t g /2 )(-=. u 图9.2.3 STFT 的时-频分析区间 1 - 258 - (a) t j t e t g t g 0)()(,Ω--=ττ,t j t e t g t g 02,)()(Ω--='ττ,(b) )(ΩG 是)(,t g t τ的FT , )(Ω'G 是)(,t g t τ'的FT , (c)在不同的0Ω和τ处,时宽、带宽均保持不变 我们在第六至第八章所讨论的M 通道最大抽取滤波器组是将)(n x 分成M 个子带信号,每一个子带信号需有相同的带宽,即M /2π,其中心频率依次为 k M π , 1,,1,0-=M k (注:若是DFT 滤波器组,则中心频率在k M π2, 1,,1,0-=M k ) ,且这M 个子带信号有着相同的时间长度。在小波变换中,我们是通过调节参数a 来得到不同的分析时宽和带宽,但它不需要保证在改变a 时使所得到的时域子信号有着相同的时宽或带宽。这是小波变换和均匀滤波器组的不同之处。但小波变换和7.9节讨论过的树状滤波器组在对信号的分析方式上极其相似。由后面的讨论可知,离散小波变换是通过“多分辨率分析”来实现的,而“多分辨率分析”最终是由两通道滤波器组来实现的。 由(9.1.1)式,定义 2 2 )( )(1),(? -= * dt a b t t x a b a WT x ψ (9.2.7) 为信号的“尺度图(scalogram )”。它也是一种能量分布,但它是随位移b 和尺度a 的能量分布,而不是简单的随),(Ωt 的能量分布,即我们在第二章至第四章所讨论的时-频分布。但由于尺度a 间接对应频率(a 小对应高频,a 大对应低频),因此,尺度图实质上也是一种时-频分布。 综上所述,由于小波变换具有恒Q 性质及自动调节对信号分析的时宽/带宽等一系列突出优点,因此被人们称为信号分析的“数学显微镜”。小波变换是八十年代后期发展起来的应用数学分支。法国数学家Y .Meyer ,地质物理学家J.Morlet 和理论物理学家A.Grossman 对小波理论作出了突出的贡献。法国学者I.Daubechies 和S.Mallat 在将小波理论引入工程应用,特别是信号处理领域起到了重要的作用。人们称这些人为“法国学派”。在小波理论中一些有影响的教科书如文献[3,5,8,16]等,一些有影响的论文如文献[42,43,51,52,53,87,88,105,116]等。国内从工程应用的目的较为全面地介绍小波理论的著作见文献[21],结合MATLAB 介绍小波理论的著作见文献[18]. 9.3 连续小波变换的计算性质 - 259 - 1.时移性质 若)(t x 的CWT 是),(b a WT x ,那么)(τ-t x 的CWT 是),(τ-b a WT x 。该结论极易证明。记)()(τ-=t x t y ,则 dt a b t t x a 1b a WT y )( )(),(--=* ?ψτ t d a b t t x a 1'--''= ? * )) (( )(τψ ),(τ-=b a WT x (9.3.1) 2. 尺度转换性质 如果)(t x 的CWT 是),(b a WT x ,令)()(t x t y λ=,则 ),(1 ),(b a WT b a WT x y λλλ = (9.3.2) 证明: dt a b t t x a b a WT y )()(1),(?-=* ψλ,令t t λ=', 则 t d 1 a b t t x a 1b a WT y '-''=? * λ λψ)( )(),( dt a b t t x a )( )(1 1λλψλλ -= ? * ),(1 b a WT x λλλ = 该性质指出,当信号的时间轴按λ作伸缩时,其小波变换在a 和b 两个轴上同时要作相同比例的伸缩,但小波变换的波形不变。这是小波变换优点的又一体现。 3. 微分性质 如果)(t x 的CWT 是),(b a WT x ,令)()()(t x dt t dx t y '==,则 ),(),(b a WT b b a WT x y ??= (9.3.3) 证明: dt a b t dt t dx a b a WT y )( )(1),(-= * ? ψ dt a b t t t x t t x a Lim t )( ) ()(10 -?-?+=? * →?ψ ?? ? ???-- -?+?=? ? * * →?dt a b t t x a dt a b t t t x a t Lim t )( )(1 )( )(1 10 ψψ - 260 - 由(9.3.1)式的移位性质,有 t b a WT t b a WT Lim b a WT x x t y ?-?+=→?) ,(),(),(0 即 ),(),(b a WT b b a WT x y ??= 4. 两个信号卷积的CWT , 令)(),(t h t x 的CWT 分别是),(b a WT x 及),(b a WT h ,并令)()()(t h t x t y *=,则 ),()(),(b a WT t x b a WT h b y *= ),()(b a WT t h x b *= (9.3.4) 式中符号b *表示对变量b 作卷积。 证明: dt a b t d t h x a b a WT y )(])()([1),(--=* +∞ ∞ -?? ψτττ τψττd dt a b t t h a x ])( )(1)[ (--= ?? * +∞ ∞ - 再由(9.3.1)式的移位性质,有 τττd b a WT x b a WT h y ),()(),(-=?+∞ ∞- 同理, τττd b a WT h b a WT x y ),()(),(-=? +∞ ∞ - 于是(9.3.4)式得证。 5. 两个信号和的CWT 令)(),(21t x t x 的CWT 分别是),(),,(21b a WT b a WT x x ,且)()()(21t x t x t x +=, 则 ),(),(),(21b a WT b a WT b a WT x x x += (9.3.5a ) 同理,如果)()()(2211t x k t x k t x +=,则 ),(),(),(2211b a WT k b a WT k b a WT x x x += (9.3.5b ) (9.3.5)式说明两个信号和的CWT 等于各自CWT 的和,也即小波变换满足叠加原理。看到WT 的这一性质,估计读者马上会想到WVD 中的交叉项问题。由(9.3.5)式看来,似乎小波变换不存在交叉项。但实际上并非如此。(9.1.2)式所定义的CWT 是“线性”变换, - 261 - 即)(t x 只在式中出现一次,而在(3.1.2)式的WVD 表达式中)(t x 出现了两次,即 )2/()2/(ττ-+* t x t x ,所以,我们称以Wigner 分布为代表的一类时-频分布为“双线 性变换”。正因为如此,),(Ωt W x 是信号)(t x 能量的分布。与之相对比,小波变换的结果 ),(b a WT x 不是能量分布。但小波变换的幅平方,即(9.2.7)式的尺度图则是信号)(t x 能 量的一种分布。将)()()(21t x t x t x +=代入(9.2.7)式,可得: 2 x 2 x 2 x b a WT b a WT b a WT 2 1 ),(),() .(+= )cos(),(),(212 1 x x x x b a WT b a WT 2θθ-+ (9.3.6) 式中2 1 ,x x θθ分别是),(1 b a WT x 和),(2 b a WT x 的幅角。 证明: ) ,(),(),(2 b a WT b a WT b a WT x x x * = )],(),()][,(),([2121b a WT b a WT b a WT b a WT x x x x * * ++= 2 x 2 x b a WT b a WT 1 1 ),(),(+= * * * ++)],(),([),(),(b a WT b a WT b a WT b a WT 2 1 2 1 x x x x 由于后两项互为共轭,因此必有(9.3.6)式. (9.3.6)式表明在尺度图中同样也有交叉项存在,但该交叉项的行为和WVD 中的交叉项稍有不同。我们在3.5节中已指出,WVD 的交叉项位于两个自项的中间,即位于 ),(μμΩt 处,),(),,(,2/)(,2/)(22112121ΩΩΩ+Ω=Ω+=t t t t t μμ分别是两个自项的时- 频中心。由(9.3.3)式可以得出,尺度图中的交叉项出现在),(1 b a WT x 和),(2 b a WT x 同时 不为零的区域,也即是真正相互交叠的区域中,这和WVD 有着明显的区别。可以证明【钱, 书】 ,同一信号)(t x 的WVD 和其尺度图有如下关系: ΩΩ-Ω= ??dtd a a b t W t W b a WT x x ),( ),(),(2 ψ (9.3.7) 式中),(Ωt W ψ是母小波)(t ψ的WVD ,该式揭示了WVD 和WT 之间的关系,这说明cohen 类的时-频分布和小波变换有着非常密切的内在联系。 - 262 - 6. 小波变换的内积定理 定理9.1 设)(),(21t x t x 和)()(R L t 2∈ψ,)(),(21t x t x 的小波变换分别是) ,(1 b a WT x 和),(2 b a WT x ,则 ??=* ∞+∞∞ -?? )(),() ,(),(212 2 1 t x t x C db a da b a WT b a WT x x ψ (9.3.8) 式中 ΩΩ Ωψ= ? ∞ d C 0 2 )(ψ (9.3.9) )(Ωψ为)(t ψ的傅里叶变换。 证明:由(9.1.4)式关于小波变换的频域定义,(9.3.8)式的左边有: db a da d e a X d e a X a b j b j 2 210 2 )()()()(4Ω' Ω'ψΩ'ΩΩψΩ? ? ?? ∞∞ -Ω'-*Ω∞∞ -*∞∞∞ -π db e d d a a X X a da b j ???? Ω'-Ω*∞∞ -*∞∞ ∞ -Ω'ΩΩ'ψΩψΩ'Ω= )(210 2 )()()()(4π Ω'ΩΩ'-ΩΩ'ψΩψΩ'Ω= * ∞ ∞ -* ∞∞∞ -??? d d a a X X a da )()()()()(2210δπ ΩΩψΩΩ= ? ?? ∞ ∞ -* ∞∞ ∞ -d a X X a 2da 2 210 )()()(π ΩΩΩΩΩ Ωψ= * ∞ ∞ ∞ -? ? d X X a d a a 21210 2 )()()()(π 假定积分 ψc a d a a =Ω' Ω'ψ= ΩΩ Ωψ? ? ∞ ∞ 2 2 )()()( 存在,再由Parseval 定理,上述的推导最后为 ??=ΩΩΩ* ∞∞ -? )(),()()(212121t x t x c d X X c ψψπ 于是定理得证。 (9.3.8)式实际上可看作是小波变换的Parseval 定理。该式又可写成更简单的形式,即 ??=??)(),(),(),,(212 1 t x t x c b a WT b a WT x x ψ (9.3.10) 进一步,如果令)()()(21t x t x t x ==,由(9.3.8)式,有 - 263 - dadb b a WT a c dt t x x 2 2 2 ),(1)(?? ? ∞∞ ∞ --∞ ∞ -= ψ (9.3.11) 该式更清楚地说明,小波变换的幅平方在尺度-位移平面上的加权积分等于信号在时域的总能量,因此,小波变换的幅平方可看作是信号能量时-频分布的一种表示形式。 (9.3.8)和(9.3.11)式中对a 的积分是从∞~0,这是因为我们假定a 总为正值。这两个式子中出现的2-a 是由于定义小波变换时在分母中出现了a /1,而式中又要对a 作积分所引入的。 读者都熟知傅里叶变换中的Parseval 定理,即时域中的能量等于频域中的能量。但小波变换的Parseval 定理稍为复杂,它不但要有常数加权,而且以ψc 的存在为条件。 9.4小波反变换及小波容许条件 下述定理给出了连续小波反变换的公式及反变换存在的条件。 定理9.2 设)()(),(2R L t t x ∈ψ,记)(Ωψ为)(t ψ的傅里叶变换,若 ∞<Ω Ωψ=? ∞ ? 2 )(ψc 则)(t x 可由其小波变换),(b a WT x 来恢复,即 d a d b t b a WT a c t x b a x )(),(1)(,0 2 ψψ ? ? ∞∞ -∞ -= (9.4.1) 证明:设)()(1t x t x =,)()(2t t t x '-=δ,则 )()(),(21t x t x t x '=?? )( )( )(),(a b t a 1dt a b t t t a 1b a WT 2 x -'= -'-= ?ψψδ 将它们分别代入(9.3.8)式的两边,再令t t =',于是有 d a d b t b a WT a c t x b a x )(),(1)(,0 2 ψψ ? ? ∞∞ -∞ -= 于是定理得证。 在定理9.1和定理9.2中,结论的成立都是以ψc <∞为前提条件的。(9.3.9)式又称为“容许条件(admissibility condition )。该容许条件含有多层的意思: 1. 并不是时域的任一函数)()(2 R L t ∈ψ都可以充当小波。其可以作为小波的必要条件 是其傅里叶变换满足该容许条件; - 264 - 2. 由(9. 3.9)式可知,若∞<ψc ,则必有0)0(=ψ,否则ψc 必趋于无穷。这等效地告诉我们,小波函数)(t ψ必然是带通函数; 3. 由于0)(0=Ωψ=Ω,因此必有 ?=0)(dt t ψ (9.4.2) 这一结论指出,)(t ψ的取值必然是有正有负,也即它是振荡的。 以上三条给我们勾画出了作为小波的函数所应具有的大致特征,即)(t ψ是一带通函数,它的时域波形应是振荡的。此外,从时-频定位的角度,我们总希望)(t ψ是有限支撑的,因此它应是快速衰减的。这样,时域有限长且是振荡的这一类函数即是被称作小波(wavelet )的原因。 2. 由上述讨论,)(t ψ自然应和一般的窗函数一样满足: ∞ t )(ψ (9.4.3) 3. 由后面的讨论可知,尺度a 常按j a 2=来离散化,Z j ∈.由(9.1.3)式,对应的傅里叶变换b j j 2j e 22Ω-Ωψ)(/,由于我们需要在不同的尺度下对信号进行分析,同时也需要在该尺度下由),(b a WT x 来重建)(t x ,因此要求2 )2(Ωψj 是有界的,当j 由+∞∞-~时,应有 B A j j ≤Ωψ≤ ∑ ∞ -∞ =2 )2( (9.4.4) 式中∞<≤ 9.5重建核与重建核方程 我们在上一节指出,并不是时域任一函数都可以用作小波)(t ψ。可以作为小波的函数至少要满足(9.3.9)式的容许条件。与此结论相类似,并不是),(b a 平面上的任一二维函数),(b a WT 都对应某一函数的小波变换。),(b a WT 如果是某一时域信号,如)(t x 的小波变换,它应满足一定的条件,此即本节要讨论的内容。 定理9.3 设),(00b a 是),(b a 平面上的任一点,),(b a 上的二维函数),(b a WT x 欲是某 - 265 - 一函数的小波变换的充要条件是它必须满足如下的重建核方程,即 d a d b b a b a K b a WT a b a WT x x ),;,(),(),(000 2 00ψ? ? ∞ ∞ -∞ -= (9.5.1) 式中),(00b a WT x 是),(b a WT x 在),(00b a 处的值, dt t t C b a b a K b a b a )()(1),;,(0 ,,00* ?= ψψψψ ??=)(),(100,,t t C b a b a ψψψ (9.5.2) 称为重建核。 证明:由(9.1.2)式小波变换的定义,有 dt t t x b a WT b a x )()(),(,? * =ψ 将(9.4.1)式代入该式,有 dt t dadb t b a WT a c 1 b a WT 00b a b a x 0 2 00x )(])(),([),(,,* ∞ ∞ -∞ -? ? ?=ψψψ d a d b dt t t c b a WT a b a b a x ])()(1)[ ,(00,,0 2 * ∞∞ -∞ -? ?? =ψψ ψ dadb t t c b a WT a b a b a x ])(),(1)[ ,(00,,0 2 ??= * ∞ ∞ -∞ -? ? ψψψ 此即(9.5.1)和(9.5.2)式。 (9.5.1)式的重建核方程和(9.5.2)式的重建核公式说明,若),(b a WT x 是)(t x 的小波变换,那么在),(b a 平面上某一点),(00b a 处小波变换的值),(00b a WT x 可由半平面 ),(R b R a ∈∈+ 上的值),(b a WT x 来表示,也即,),(00b a WT x 是半平面上),(τa WT x 的总 贡献。既然),(b a 平面上各点的),(τa WT x 可由(9.5.1)式互相表示,因此这些点上的值是相关的,也即(9.4.1)式对)(t x 的重建是存在信息冗余的。这一结论告诉我们可以用),(b a 平面上离散栅格上的),(b a WT x 来重建)(t x ,以消除重建过程中的信息冗余。 在第二章中已指出,当用)(t x 的短时傅里叶变换),(Ωt STFT x 来重建)(t x 时,),(Ωt 平面上的信息也是有冗余的,即),(Ωt 平面上各点的),(Ωt STFT x 是相关的,因此引出了离散栅格上的STFT ,如(2.2.6)式,进一步的发展即是信号的Gabor 展开与Gabor 变换。由此可以得出,将一个一维的函数映射为一个二维函数后,在二维平面上往往会存在信息的冗余,由此引出了二维函数的离散化问题及标架理论。有关离散小波变换及小波标架的内容将在本章的最后两节来讨论。 - 266 - 重建核),;,(00b a b a k ψ是小波)(,t b a ψ和),(00b a 处的小波)(0 ,t b a ψ的内积,因此ψk 反 映了)(,t b a ψ和)(0 ,t b a ψ的相关性。若00,b b a a ==,即两个小波重合时,ψk 取最大值; 若),(b a 远离),(00b a ,则ψk 将迅速减小。若能保证),(00b b a a k --=δψ,则),(b a 平面上各点小波变换的值将互不相关。这等效地要求对任意的尺度a 及位移b ,由母小波)(t ψ形成的一族)(,t b a ψ是两两正交的。可以想象,若b a ,连续取值,要想找到这样的母小波 )(t ψ使)(,t b a ψ两两正交,那将是非常困难地。因此,连续小波变换的),(b a WT x 必然存在信息冗余。然而,当b a ,离散取值时,则有可能得到一族正交小波基)(,t b a ψ。 9.6小波的分类 由前两节的讨论可知,作为一个小波的函数)(t ψ,它一定要满足容许条件,在时域一定要是有限支撑的,同时,也希望在频域也是有限支撑的,当然,若时域越窄,其频域必然是越宽,反之亦然。在时域和频域的有限支撑方面我们往往只能取一个折中。此外,我们希望由母小波)(x ψ形成的)(,t b a ψ是两两正交的,或是双正交的;进一步,我们希望)(x ψ有高阶的消失矩,希望与)(x ψ相关的滤波器具有线性相位,等等。我们可以根据上述要求对现已提出的大量的小波函数作一粗略地分类。在下面的分类中,第一类是所谓地“经典小波”,在MA TLAB 中把它们称作“原始(Crude )小波”。这是一批在小波发展历史上比较有名的小波;第二类是Daubecheis 构造的正交小波,第三类是由Cohen ,Daubechies 构造的双正交小波。 9.6.1经典类小波 1. Haar 小波 Haar 小波来自于数学家Haar 于1910年提出的Haar 正交函数集,其定义是: - 267 - ?????-=011 )(t ψ ?? ? ??<≤<≤其它12/12/10t t (9.6.1) 其波形如图9.6.1(a )所示。)(t ψ的傅里叶变换是: 2 /2 )( s i n 4)(Ω-ΩΩ=Ωψj e a j (9.6.2) Haar 小波有很多好的优点,如: (1)Haar 小波在时域是紧支撑的,即其非零区间为(0,1); (2)若取Z b Z j 2a j ∈∈=+,,,那么Haar 小波不但在其整数位移处是正交的,即 0)(),(=?-?k t t ψψ,而且在j 取不同值时也是两 两正交的,即0)2(),(=??-t t j ψψ如图9.6.1(b)和(c) 所示。所以Haar 小波属正交小波; (3)Haar 波是对称的。我们知道,离统的单位抽样响应 若具有对称性,则该系统具有线性相位,这对于去除 相位失真是非常有利的。Haar 小波是目前唯一一个既 具有对称性又是有限支撑的正交小波; (4)Haar 小波仅取+1和-1,因此计算简单。 但Haar 小波是不连续小波,由于?≠0)(dt t t ψ,因 此)(Ωψ在0=Ω处只有一阶零点,这就使得Haar 小波在实际的信号分析与处理中受到了限制。但由于 Haar 小波有上述的多个优点,因此在教科书与论文 中常被用作范例来讨论。 图9.6.1 Harr 小波, (a) )(t ψ,(b) )1(-t ψ,(c) )2/(t ψ 2.Morlet 小波 Morlet 小波定义为 t j t e e t Ω-=2 /2 )(ψ (9.6.3) 其傅里叶变换 2 /)(2 02)(Ω-Ω-= Ωψe π (9.6.4) 它是一个具有高斯包络的单频率复正弦函数。考虑到待分析的信号一般是实信号,所以在 - 268 - MA TLAB 中将(9.6.3)式改造为: t e t t 02 /cos )(2 Ω=-ψ (9.6.5) 并取 50=Ω。该小波不是紧支撑的,理论上讲t 可取+∞∞-~。但是当50=Ω,或再取更大的值时,)(t ψ和)(Ωψ在时域和频域都具有很好的集中,如图9.6.2所示。 Morlet 小波不是正交的,也不是双正交的,可用于连续小波变换。但该小波是对称的,是应用较为广泛的一种小波。 图9.6.2 Morlet 小波, (a)时域波形, (b)频谱 3 .Mexican hat 小波 该小波的中文名字为“墨西哥草帽”小波,又称Marr 小波。它定义为 2 /2 2 )1()(t e t c t --=ψ (9.6.6) 式中4 /13 2π = c ,其傅里叶变换为 2 /22 2)(Ω-Ω=Ωψe c π (9.6.7) 该小波是由一高斯函数的二阶导数所得到的,它沿着中心轴旋转一周所得到的三维图形犹如一顶草帽,故由此而得名。其波形和其频谱如图9.6.3所示。 该小波不是紧支撑的,不是正交的,也不是双正交的,但它是对称的,可用于连续小波变换。由于该小波在0=Ω处有二阶零点,因此它满足容许条件,且该小波比较接近人眼视觉的空间响应特征,因此它在1983年即被用于计算机视觉中的图像边缘检测[131,75]。 - 269 - 图9.6.3 墨西哥草帽小波, (a)时域波形, (b)频谱 4.Gaussian 小波 高斯小波是由一基本高斯函数分别求导而得到的,定义为: 2 t k k 2 e dt d c t /)(-=ψ , 821k ,,, = (9.6.8) 式中定标常数是保证1t 2 =) (ψ。 该小波不是正交的,也不是双正交的,也不是紧支撑的。当k 取偶数时)(t ψ正对称,当k 取奇数时,)(t ψ反对称。图9.6.4给出了4k =时的)(t ψ的时域波形及对应的频谱。 图9.6.4 高斯小波,取4=k , (a)时域波形, (b)频谱 9.6.2 正交小波 - 270 - 目前提出的正交小波大致可分为四种,即Daubechies 小波,对称小波,Coiflets 小波和Meyer 小波。这些正交小波和前面所讨论的“经典小波”不同,它们一般不能由一个简洁的表达式给出)(t ψ,而是通过一个叫做“尺度函数(Scalling function )”的)(t φ的加权组合来产生的。尺度函数是小波变换的又一个重要概念。由下一章的讨论可知,小波函数)(t ψ, 尺度函数)(t φ同时和一个低通滤波器)(0z H 及高通滤波器)(1z H 相关连,)(0z H 和)(1z H 可构成一个两通道的分析滤波器组。这些内容构成了小波变换的多分辨率分析的理 论基础。因此,在讨论正交小波时,同时涉及到尺度函数)(t φ,分析滤波器组)(0z H ,)(1z H 及综合滤波器组)(0z G ,)(1z G 。MA TLAB 中的Wavelet Toolbox 中有相关的软件来产生各类正交小波及其相应的滤波器。 1.Daubechies 小波 Daubechies 小波简称db 小波。它是由法国女学者Ingrid Dauechies 于90年代初提出并构造的。Daubechies 对小波变换的理论做出了突出的贡献,特别是在尺度a 取2的整数次幂时的小波理论及正交小波的构造方面进行了深入的研究,其代表作《Ten Lectures on Wavelet (小波十讲)》深受同行们的欢迎。 dbN 中的N 表示db 小波的阶次,10~2=N .当1=N 时,db1即是Haar 小波。因此,前述的Haar 小波应归于“正交小波”类。Daubechies 计算出了10~2=N 时的010,,),(g h h t φ及1g 。在MA TLAB5.3中,N 的阶次还可以扩展。db 小波是正交小波,当 然也是双正交小波,并是紧支撑的。)(t φ的支撑范围在)12(~0-=N t ,)(t ψ的支撑范围在N N ~)1(-。小波)(t ψ具有N 阶消失矩,)(Ωψ在0=Ω处具有N 阶零点。但db 小波是非对称的,其相应的滤波器组属共轭正交镜像滤波器组(CQMFB )。图9.6.5给出了 4=N 时,)(t ψ,)(t φ及)(Ωψ,)(ΩΦ的波形。有关db 小波的构造等更多内容见第十 一章。 2. 对称小波 对称小波简记为symN ,8,,3,2 =N ,它是db 小波的改进,也是由Daubechies 提出并构造的。它除了有db 小波的特点外,主要是)(t ψ是接近对称的,因此,所用的滤波器可接近于线性相位。图9.6.6是4=N 时的对称小波。 3. Coiflets 小波 该小波简记为coifN ,5,,2,1 =N .在db 小波中,Daubechies 小波仅考虑了使小波函数)(t ψ具有消失矩(N 阶),而没考虑尺度函数)(t φ。R.Coifman 于1989年向Daubechies 提出建议,希望能构造出使)(t φ也具有高阶消失矩的正交紧支撑小波。Daubechies 接受了这一建议,构造出了这一类小波,并以Coifman 的名字命名。 coifN 是紧支撑正交、双正交小波,支撑范围为16-N ,也是接近对称的。)(t ψ的消失矩是N 2,)(t φ的消失矩是12-N 。图9.6.7是4=N 时的coif4小波。 - 271 - 图9.6.5 4=N 时db 小波, (a) )(t φ,(b) )(t ψ,(c) )(ΩΦ,(d) )(Ωψ 图9.6.6 4=N 时的对称小波,(a) )(t φ,(b) )(t ψ 齐鲁工业大学 课程设计任务书 学院电子信息与控制工程学院专业通信工程 姓名班级学号 题目树形结构滤波器组设计 主要内容、基本要求、主要参考资料等: 主要内容: 滤波器组在语音、图像的子带编码和压缩中都有着广泛的应用,非均匀滤波器组还构成了Mallat多分辨分析的算法基础,在小波变换中占有重要的地位。本设计主要内容是研究树形滤波器组的原理,并设计一个树形滤波器组,实现语音信号的分解与重构。基本要求: (1)滤波器组的基本原理;(2)树形结构滤波器组的原理及设计方法;(3)设计一个8通道的树形结构滤波器组:均匀滤波器组和非均匀滤波器组;给出设计思路及结果;(4)用设计的滤波器组对某信号进行多通道分解,验证滤波器组的性能,对结果进行分析;(5)提交课程设计报告。 主要参考资料: 1. 胡广书. 现代信号处理教程,数字信号处理. 清华大学出版社. 2005.06 2. 高西全. 数字信号处理. 西安电子科技大学出版社. 2009.01 3. matlab信号处理相关书籍,多采样率信号处理的书籍、资料。 4. 相关网络资源 完成期限:自 2013 年 6 月 18 日至 2013 年 7 月 5 日 指导教师:张凯丽教研室主任: 齐鲁工业大学 课程设计任务书 学院电子信息与控制工程学院专业通信工程 姓名班级学号 题目平行结构滤波器组设计 主要内容、基本要求、主要参考资料等: 主要内容: 滤波器组在语音、图像的子带编码和压缩中都有着广泛的应用,非均匀滤波器组还构成了Mallat多分辨分析的算法基础,在小波变换中占有重要的地位。本设计主要内容是研究平行滤波器组的原理,并设计一个平行滤波器组。 基本要求: (1)滤波器组的基本原理;(2)平行结构滤波器组的原理及设计方法;(3)设计一个8通道的平行结构滤波器组:均匀滤波器组和非均匀滤波器组;给出设计思路及结果;(4)用设计的滤波器组对某信号进行多通道分解,验证滤波器组的性能,对结果进行分析;(5)提交课程设计报告。 主要参考资料: 1. 胡广书. 现代信号处理教程,数字信号处理. 清华大学出版社. 2005.06 2. 高西全. 数字信号处理. 西安电子科技大学出版社. 2009.01 3. matlab信号处理相关书籍,多采样率信号处理的书籍、资料。 4. 相关网络资源 1、 %---filter求卷积,B(Z)/A(Z)=H(Z),已知B(Z)和A(Z),求y(n)=x(n)*h(n)----- clear; x=ones(100); t=1:100; b=[.001836,.007344,.011016,.007374,.001836]; a=[1,-3.0544,3.8291,-2.2925,.55075]; % y=filter(b,a,x); % 求所给系统的输出,本例实际上是求所给系统的阶跃响应; plot(t,x,'r.',t,y,'k-');grid on; ylabel('x(n) and y(n)') xlabel('n') 1、 %---filter求卷积,B(Z)/A(Z)=H(Z),已知B(Z)和A(Z),求y(n)=x(n)*h(n)----- clear; x=ones(100); t=1:100; b=[.001836,.007344,.011016,.007374,.001836]; a=[1,-3.0544,3.8291,-2.2925,.55075]; % y=filter(b,a,x); % 求所给系统的输出,本例实际上是求所给系统的阶跃响应; plot(t,x,'r.',t,y,'k-');grid on; ylabel('x(n) and y(n)') xlabel('n') 第一章产生信号,求卷积和自相关函数 1、 %信号产生 n=0:100; %工频 f0=50;A=220;fs=400; x1=A*sin(2*pi*f0*n/fs); subplot(321);plot(n,x1);xlabel('n');ylabel('x1(n)') ;grid on; %率减正弦 f0=2;A=2;alf=0.5;fs=16; x2=A*exp(-alf*n/fs).*sin(2*pi*f0*n/fs); subplot(323);plot(n,x2);xlabel('n');ylabel('x2(n)') ;grid on; %谐波信号 现代数字信号处理Advanced Digital Signal Processing 东南大学信息科学与工程学院 杨绿溪 教科书、参考书 ?杨绿溪, 现代数字信号处理, 科学出版社, 2008年12月。?胡广书,数字信号处理----理论、算法与实现,清华大学出版社,1997(或2003)年。 ?皇甫堪等,现代数字信号处理,电子工业出版社,2004年6月。 ?丁玉美等,数字信号处理-----时域离散随机信号处理,西安电子科技大学出版社,2002年12月。 ?金连文,韦岗,现代数字信号处理简明教程,清华大学出版社,2004年1月。 ?何子述等,现代数字信号处理及其应用,清华大学出版社,2009年5月。 ?S.Haykin, Adaptive Filter Theory, Prentice Hall, 2001. 课程基本内容 1.离散时间信号处理基础(本科内容复习) 2.离散随机信号分析基础 –离散时间随机信号基本概念? –基本的正交变换(与信号正交展开、去相关) –基本的参数估计方法 3.线性预测和格型滤波器(语音编码应用)? 4.随机信号的线性建模? 5.功率谱估计(与频率估计、子空间分析)? 6.最优线性滤波: 维纳滤波与卡尔曼滤波? 7.自适应滤波器(线性系统的学习)? 可能选讲或简介的内容 8.多速率数字信号处理和滤波器组 9. 神经智能信息处理;压缩感知等 10. 盲信号处理 11.空时、阵列与MIMO信号处理 12.信号的时频分析 第一章离散时间信号处理基础??本科课程内容复习?? ?数字信号与数字信号处理(DSP)概述 ?滤波器--简单的数字信号处理系统 ?信号的变换-z变换、DTFT、DFT和FFT ?特殊的序列(和对应的滤波器) –全通序列、最小相位序列、线性相位、半正定序列 数字信号处理_胡广书(第三版)_随书光盘 关于光盘的使用说明 数字信号处理_胡广书(第三版)_随书光盘.rar 本光盘共包含六个子目录,其中三个是DSP_FORTRAN, DSP_C和DSP_MATLAB,另外三个是有关习题所需要的数据或文献。DSP_FORTRAN和DSP_C各含有约40个信号处理的子程序,概括了书中所涉及到的绝大部分算法。程序分别由FORTRAN语言和C语言编写(MA模型、ARMA模型及最小方差谱估计三个算法只给出了用C语言编写的程序, 没有给出相应的FORTRAN子程序),并在PC机上调试通过。编译环境是FORTRAN77 V5. 10和TURBO C2. 0。DSP_MATLAB含有近120多个用MA TLAB编写的信号处理程序,它们是本书各个章节的大部分例题,使用的是MA TLAB6.1。 FORTRAN子程序名称的长度全都是6位,扩展名为.for,C语言子程序的名称全部是7位,由相应的FORTRAN子程序在其名称前加字母m而形成,并将扩展名改为.c。为了方便读者的使用,光盘中还给出了调用FORTRAN子程序的简单主程序。读者只需将此主程序和主程序指定的子程序作编译、连接和运行,即可得出相应的结果。FORTRAN主程序的名称为7位或8位,它是在原FORTRAN子程序前加字母h所构成的,扩展名仍是.for。h后面的一个数(如果有的话)表示该程序是相应子程序的第几个主程序。例如,子程序desiir.for是用来设计IIR滤波器的FORTRAN子程序,对应的C程序是mdesiir.c,调用desiir.for 的第一个主程序是h1desiir.for(设计低通IIR DF),依此类推。 用MATLAB编写的程序的名称由“exa”开头,接下来是所在的章、节及例题的序号,如exa010101,指的是第1章第1节(即1.1节)的第1个例题,即例1.1.1。如果该程序是为了说明某一个m文件的应用,则在上述名称的后面跟一个下划线,再在后面加上所说明的MATLAB文件的名称,如exa011001_rand,即是例1.10.1,该例用来说明rand.m文件的应用。应该说明的是,这些MATLAB程序不是像所附的FORTRAN和C程序那样作为一个个子程序应用,而是用来说明书上的例题及各个m文件的应用。 用FORTRAN和C语言编写的每一个子程序的功能及调用时各个参数的含义已在程序的开头作了较为详细的说明,此处不再赘述。所附程序中,绝大多数都是作者和其研究生编写的,也有少量是参考国外已公开发表的杂志和教科书,如经典的FFT和REMEZ算法等。 下面给出的是用FORTRAN语言和C语言编写的程序的名称、功能以及有关问题的说 数字信号处理专业课程设计任务书 说明:本表由指导教师填写,由教研室主任审核后下达给选题学生,装订在设计(论文)首页 1需求分析 用海明窗函数法设计一个数字FIR 带阻滤波器,要求通带边界频率为350Hz ,550Hz ,阻带边界频率为400Hz ,500Hz ,通带最大衰减1dB ,阻带最小衰减40dB ,抽样频率为2000Hz ,用MA TLAB 画出幅频特性,画出并分析滤波器传输函数的零极点; 信号)2sin()2sin()()()(2121t f t f t x t x t x ππ+=+=经过该滤波器,其中=1f 450Hz , =2f 600Hz ,滤波器的输出)(t y 是什么?用Matlab 验证你的结论并给出)(),(),(),(21t y t x t x t x 的图形。 ,数字信号处理是把许多经典的理论体系作为自己的理论基础,同时又使自己成为一系列新兴学科的理论基础。现如今随着电子设备工作频率范围的不断扩大,电磁干扰也越来也严重,接收机接收到的信号也越来越复杂。为了得到所需要频率的信号,就需要对接收到的信号进行过滤,从而得到所需频率段的信号,这就是滤波器的工作原理。对于传统的滤波器而言,如果滤波器的输入,输出都是离散时间信号,则该滤波器的冲激响应也必然是离散的,这样的滤波器定义为数字滤波器。它通过对采样数据信号进行数学运算来达到频域滤波的目的. 滤波器在功能上可分为四类,即低通(LP )、高通(HP )、带通(BP )、带阻(BS )滤波器等,每种又有模拟滤波器(AF )和数字滤波器(DF )两种形式。对数字滤波器,从实现方法上,由有限长冲激响应所表示的数字滤波器被称为FIR 滤波器,具有无限冲激响应的数字滤波器被称为IIR 滤波器。 F IR 数字滤波器的主要优点有:一、可具有严格的线性相位特性;二、不存在稳定性问题;三、可利用DFT 来实现。这些优点使FIR 数字滤波器得到了广泛应用。窗函数法是一种设计FIR 数字滤波器的基本方法,但它不是最佳设计方法,在满足同样设计指标的情况下,用这种方法设计出的滤波器的阶数通常偏大。在窗函数法的基础上,以所定义的逼近误差最小为准则来进行优化设计的算法,由于其中的逼近误差可根据不同的设计要求进行定义,故此算法适应性强,它即可用于设计选频型滤波器,又适用于非选频型滤波器的设计。常用的窗函数有矩形窗函数、三角窗函数、汉宁(Hann )窗函数、海明(Hamming )窗函数、布莱克曼(Blackman )窗函数、凯塞(Kaiser )窗函数等。本设计通过MATLAB 软件对FIR 型滤波器进行理论上的实现,利用海明窗函数设计数字FIR 带阻滤波器。FIR 系统不像IIR 系统那样易取得较好的通带和阻带衰减特性,要取得较好的衰减特性,一般要求H (z )阶次要高,也即M 要大。FIR 系统有自己突出的优点:系统总是稳定的;易实现线性相位;允许 博士研究生入学考试大纲 考试科目名称:现代数字信号处理 一、考试要求: 要求考生全面系统地掌握现代数字信号处理的理论、算法及实现方法,并且能够综合应用所学的知识分析和解决问题的能力。 二、考试内容: 1)离散时间信号与系统基础理论 a: 线性移不变系统的线性移不变和时域因果稳定性的判定; b:z正变换和其反变换的计算方法; c:z变换的收敛域及z变换的性质; d: DFT的定义、重要性质及应用; e: 基-2 DIT—FFT和基-2 DIF—FFT算法的基本思想及特点(算法思想,运算量,运算流图,结构规则等)。 2) 数字滤波器的基本结构及设计方法 a:用双线性变换法设计IIR数字低通滤波器; b:FIR 数字滤波器窗函数的设计方法及特点,窗长对频谱的影响。 3) 平稳随机信号 a: 平稳随机信号定义及其特征描述; b: 均值、自相关函数计算及平稳性的判断; c: 平稳随机信号通过线性系统输出估计(包括自相关函数和功率譜等); d: 平稳随机信号的各态遍历性的相关知识。 4) 功率譜估计 a: 自相关函数的估计方法; b: 经典功率譜估计的基本方法; c: 直接法和间接法估计的质量; d: 平稳随机信号的参数模型; e: AR模型的正则方程与参数计算; 三、试卷结构: 题型结构 a: 定理、概念应用及基本计算题 b: 综合计算、分析题 四、参考书目 程佩青,数字信号处理教程(第二版),清华大学出版社,2001 胡广书,数字信号处理-理论、算法与实现(第二版)下篇,清华大学出版 社,2003 现代数字信号处理 沈阳工业大学2009年博士招生(二) 一、填空(每空1分,共15分) 1、 单位脉冲响应分别为)(1n h 和)(2n h 的两线性系统相串联,其等效系统函数时 域 及 频域 表达 式 分别 是 ) (n h = ) (*)(21n h n h , )(ωj e H =[])()()(*)(2121ωωj j e H e H n h n h DTFT ?=。 2、 两个有限长序列)(1n x 和)(2n x 长度分别是1N 和2N ,在做线性卷积后结果 长度是121-+N N 。 3、 若系统有一个移变的增益,则此系统一定是移变系统。 4、 一个因果稳定系统的系统函数的全部极点必须在z 平面的单位圆内。 5、 滤波器的信号流图表示中,输入节点又称为源节点。 6、 FFT 算法可以分为两大类,即按时间抽选法和按频率抽选法。 7、 设计FIR 滤波器时,对窗函数要求窗谱主瓣尽量窄,以获得较陡的过渡带; 尽量减少窗谱最大边瓣的相对幅度,这样可使肩峰和波纹减少。 8、 对随机信号θ估计的偏差为[]{}{}θθθθθ -=-=???E E bia ;若[]0?=θbia ,则称θ?为θ的无偏估计;如有[ ]0?lim =∞ →θbia N ,则称θ?为θ的渐近无偏估计。 9、 随机信号的功率谱表现的是信号功率随频率ω的变换情况。对平稳随机信号 X(n),它的自功率谱是平稳随机信号X(n)自相关函数的傅里叶变换。 二、简答题(每题2分,共20分) 1、 什么是周期序列,并判断()??? ??-=87 3cos ππ n A n x 的周期性。 答:周期序列的定义是:对于一个正整数N ,如果序列()n x 满足 ()()mN n x n x -=,其中m 为任意整数,则我们称序列()n x 为周期序列,满足 该式的最小正整数N 即称序列()n x 的周期。根据周期序列的定义可以判断,序列()??? ??-=87 3cos ππ n A n x 是周期序列,其周期大小为14。 1 第1章 信号分析基础 1.1 信号的时-频联合分析 我们生活在一个信息社会里,而信息的载体就是我们本书要讨论的主题——信号。在我们身边以及在我们身上,信号是无处不在的。如我们随时可听到的语音信号,随时可看到的视频图像信号,伴随着我们生命始终的心电信号,脑电信号以及心音、脉搏、血压、呼吸等众多的生理信号。 对一个给定的信号,如)(t x ,我们可以用众多的方法来描述它,如)(t x 的函数表达式, 通过傅立叶变换所得到的)(t x 的频谱,即)(Ωj X ,再如)(t x 的相关函数,其能量谱或功率谱等。在这些众多的描述方法中,有两个最基本的物理量,即时间和频率。显然,时间和频率与我们的日常生活关系最为密切,我们时时可以感受到它们的存在。时间自不必说,对频率,如夕阳西下时多变的彩霞,音乐会上那优美动听的旋律以及在一片寂静中突然冒出的一声刺耳的尖叫等,这些都包含了丰富的频率内容。正因为如此,时间和频率也成了描述信号行为的两个最重要的物理量。 信号是变化着的,变化着的信号构成了我们周围五彩斑斓的世界。此处所说的“变化”,一是指信号的幅度随时间变化,二是指信号的频率内容随时间变化。幅度不变的信号是“直流”信号,而频率内容不变的信号是由单频率信号,或多频率信号所组成的信号,如正弦波、方波、三角波等。不论是“直流”信号还是正弦类信号都只携带着最简单的信息。 给定了信号)(t x 的函数表达式,或x 随t 变化的曲线,我们可以由此得出在任一时刻处 该信号的幅值。如果想要了解该信号的频率成分,即“在××Hz 处频率分量的大小”,则可通过傅立叶变换来实现,即 ?∞ ∞ -Ω-=Ωdt e t x j X t j )()( (1.1.1a ) ? ∞ ∞ -ΩΩΩ= d e j X t x t j )()(21π (1.1.1b ) 式中f π2=Ω,单位为弧度/秒,将)(Ωj X 表示成) (|)(|ΩΩ?j e j X 的形式,即可得到 |)(|Ωj X 和)(Ω?随Ω变化的曲线,我们分别称之为)(t x 的幅频特性和相频特性。 如果我们想知道在某一个特定时间,如0t ,所对应的频率是多少,或对某一个特点的频 数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号:25,41()6,040,n n x n n +-≤≤-?? =≤≤??? 其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。 3. 判断下面的序列是否是周期的,若是周期的,确定其周期。 (1)3()cos()7 8x n A n π π=-,A 是常数; (2)1 ()8 ()j n x n e π-=。 解: (1)3214 , 73w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w w π π==,这是无理数,因此是非周期序列。 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()n m y n x m ==∑。 解: (1)令:输入为0()x n n -,输出为 '000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 12121212()[()()] ()()2((1)(1))3((2)(2)) y n T ax n bx n ax n bx n ax n bx n ax n bx n =+=++-+-+-+- 1111[()]()2(1)3(2)T ax n ax n ax n ax n =+-+- 2222[()]()2(1)3(2)T bx n bx n bx n bx n =+-+- 南华大学电气工程学院 南华大学课程设计 基于 FPGA 的新一代太阳能热水器水位水温智能测控仪设计 第5章信号的抽取与插值 5.1前言 至今,我们讨论的信号处理的各种理论、算法及实现这些算法的系统都是把抽样频率f视为恒定值,即在一个数字系统中只有一个抽样率。但是,在实际工作中,我们经常会s 遇到抽样率转换的问题。一方面,要求一个数字系统能工作在“多抽样率(multirate)”状态,以适应不同抽样信号的需要;另一方面,对一个数字信号,要视对其处理的需要及其自身的特征,能在一个系统中以不同的抽样频率出现。例如: 1. 一个数字传输系统,即可传输一般的语音信号,也可传输播视频信号,这些信号的频率成份相差甚远,因此,相应的抽样频率也相差甚远。因此,该系统应具有传输多种抽样率信号的能力,并自动地完成抽样率的转换; 2. 如在音频世界,就存在着多种抽样频率。得到立体声声音信号(Studio work)所用的抽样频率是48kHz,CD产品用的抽样率是44.1kHz,而数字音频广播用的是32kHz[15]。 3. 当需要将数字信号在两个具有独立时钟的数字系统之间传递时,则要求该数字信号的抽样率要能根据时钟的不同而转换; 4.对信号(如语音,图象)作谱分析或编码时,可用具有不同频带的低通、带通及高通滤波器对该信号作“子带”分解,对分解后的信号再作抽样率转换及特征提取,以实现最大限度减少数据量,也即数据压缩的目的; 5. 对一个信号抽样时,若抽样率过高,必然会造成数据的冗余,这时,希望能在该数字信号的基础上将抽样率减下来。 以上几个方面都是希望能对抽样率进行转换,或要求数字系统能工作在多抽样率状态。近20年来,建立在抽样率转换理论及其系统实现基础上的“多抽样率数字信号处理”已成为现代信号处理的重要内容。“多抽样率数字信号处理”的核心内容是信号抽样率的转换及滤波器组。 减少抽样率以去掉过多数据的过程称为信号的“抽取(decimatim)”,增加抽样率以增加数据的过程称为信号的“插值(interpolation)。抽取、插值及其二者相结合的使用便可实现信号抽样率的转换。 滤波器组,因名思义,它是一组滤波器,它用以实现对信号频率分量的分解,然后根 124 《数字信号处理》课程读书笔记 ——利用切比雪夫逼近法设计FIR 滤波器 切比雪夫逼近法是一种等纹波逼近法,它使误差在整个频带均匀分布,对同样的技术指标,这种逼近法需要的滤波器阶数低,而对同样的滤波器阶数,这种逼近法的最大误差最小。 一.切比雪夫最佳一致逼近准则 设理想的滤波器幅度特性为H d (ω),实际设计的滤波器的幅度特性为H g (ω),其加权误差E (ω)用下式表示: E (ω)=W (ω)[H d (ω)- H g (ω)], ① 其中W (ω)为误差加权函数,它是在通带或阻带要求不同的逼近精度而设计的。 设计具有线性相位的FIR 滤波器,其单位脉冲响应h(n)必须满足一定条件,假设设计的是h(n)=h(n-N-1),N=奇数情况。则有: H(e j ω)=e -j(N-1)ω/2H g (ω),其中H g (ω)= ∑-=)1(2 10 cos )(N n n n a ω 令M=(N-1)/2代入①得: E (ω)=W (ω)[H d (ω)- ∑=M n n n a 0 cos )(ω], ② 最佳一致逼近问题是选择M+1个系数)(n a ,使加权误差E (ω)的最大值为最小,即: min[A E ∈ωω)(max ] ,式中A 表示所研究的频带,这里指通带或阻带。由②式知,这是一个由M 次多项式,根据上面提出的准则逼近一连续函数的问题。 切比雪夫理论指出这个多项式存在且唯一,并指出构造该多项式的方法是“交错点组定理”。该定理指出最佳一致逼近的充要条件是:E (ω)在A 上至少呈现M+2个“交错”使得:E (ωi )=- E (ωi+1),A i E E ∈=ωωω)(max )(,其中ω0<ω1<ω2…<ωM+1, ω∈A 。按照该准 则设计的滤波器通带或阻带具有等纹波性质。 二.利用最佳逼近准则设计线性相位FIR 滤波器 设需要设计的是线性相位的低通滤波器,如果知道了A 上的M+2个交错点频率:ω0,ω1,…ωM+1,按照 ②式,并根据交错点组准则,可写出: W (ωk )[H d (ωk )- ∑=M n k n n a 0cos )(ω ]= (-1)k ρ ρ=A E ∈ωω)(max ,k = 0,1,2, …M+1 ③ 把③写成矩阵形式进行求解,可以唯一地求出)(n a ,n=0,1,2, …M,以及加权误差的最大绝对值ρ。由)(n a 可以求出滤波器的h(n)。实际上这些交错点组的频率ω0,ω1,…ωM ,是不知道的,且求解③式是比较困难的。 答案很详细,考试前或者平时作业的时候可以好好研究,祝各位考试 成功!! 电子科技大学微电子与固体电子学陈钢教授著 数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号:25,41()6,040,n n x n n +-≤≤-?? =≤≤??? 其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()n m y n x m ==∑。 解: (1)令:输入为0()x n n -,输出为 '000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 12121212()[()()] ()()2((1)(1))3((2)(2)) y n T ax n bx n ax n bx n ax n bx n ax n bx n =+=++-+-+-+- 1111[()]()2(1)3(2)T ax n ax n ax n ax n =+-+- 2222[()]()2(1)3(2)T bx n bx n bx n bx n =+-+- 1212[()()][()][()]T ax n bx n aT x n bT x n +=+ 语音信号分析与处理 摘要 用MATLAB对语音信号进行分析与处理,采集语音信号后,在MATLAB软件平台进行频谱分析;并对所采集的语音信号加入干扰噪声,对加入噪声的信号进行频谱分析,设计合适的滤波器滤除噪声,恢复原信号。 数字滤波器是数字信号处理的基础,用来对信号进行过滤、检测和参数估计等处理。IIR数字滤波器最大的优点是给定一组指标时,它的阶数要比相同组的FIR滤波器的低的多。信号处理中和频谱分析最为密切的理论基础是傅立叶变换(FT)。离散傅立叶变换(DFT)和数字滤波是数字信号处理的最基本内容。 关键词:MATLAB;语音信号;加入噪声;滤波器;滤波 1. 设计目的与要求 (1)待处理的语音信号是一个在20Hz~20kHz频段的低频信号。 (2)要求MATLAB对语音信号进行分析和处理,采集语音信号后,在MATLAB平台进行频谱分析;并对所采集的语音信号加入干扰噪声,对加入噪声的信号进行 频谱分析,设计合适的滤波器进行滤除噪声,恢复原信号。 2. 设计步骤 (1)选择一个语音信号或者自己录制一段语音文件作为分析对象; (2)对语音信号进行采样,并对语音信号进行FFT频谱分析,画出信号的时域波形图和频谱图; (3)利用MATLAB自带的随机函数产生噪声加入到语音信号中,对语音信号进行回放,对其进行FFT频谱分析; (4)设计合适滤波器,对带有噪声的语音信号进行滤波,画出滤波前后的时域波形图和频谱图,比较加噪前后的语音信号,分析发生的变化; (5)对语音信号进行回放,感觉声音变化。 3. 设计原理及内容 3.1 理论依据 (1)采样频率:采样频率(也称采样速度或者采样率)定义了每秒从连续信号中提取并组成离散信号的采样个数,它用赫兹(Hz)来表示。采样频率只能用于周期性采样的采样器,对于非周期采样的采样器没有规则限制。通俗的讲,采样频率是指计算机每秒钟采集多少个声音样本,是描述声音文件的音质、音调,衡量声卡、声音文件的质量标准。采样频率越高,即采样的间隔时间越短,则在单位数字信号处理课程设计任务书doc
数字信号处理(胡广书例题作业程序)
现代数字信号处理
数字信号处理(理论算法与实现)_胡广书(第三版)_随书光盘——使用说明
数字信号处理课程设计
现代数字信号处理
现代信号处理教程 - 胡广书(清华)
《数字信号处理》第三版课后习题答案
数字信号处理-Hilbert变换滤波器
《数字信号处理课程设计》任务书
设计题目: Hilbert 变换滤波器的实现 专 业: 学 号:
学生姓名: 起迄日期: 指导教师:
2012 年 12 月 28 日—2013 年 1 月 14 日
《数字信号处理课程设计》任务书
1.课程设计的内容和要求(包括原始数据、技术要求、工作要求等) :
1.设计内容: 根据自己在班里的学号0207(最后两位)查表一得到一个四位数1301,由该四位 数索引表二确定待设计数字滤波器的类型:Hilbert变换滤波器;滤波器设计方法: 等波纹FIR。 2. 滤波器的设计指标: (1)通带波纹 ?1 ≤ 0.05 ; (2)阻带波纹 ? 2 ≤ 0.05 ; (3)过渡带宽度 (4)滚降 = 0.014π rad ; =5.6 dB ;
其中,错误!未找到引用源。为学号的最后两位,故 i d =7 3. 滤波器的初始设计通过手工计算完成; 4. 在计算机辅助计算基础上分析滤波器结构对其性能指标的影响 (至少选择两种以 上合适的滤波器结构进行分析); 5. 在计算机辅助计算基础上分析滤波器参数的字长对其性能指标的影响; 6. 以上各项要有理论分析和推导、原程序以及表示计算结果的图表; 7. 课程设计结束时提交设计说明书。
-2-
2.对课程设计成果的要求〔包括图表(或实物)等硬件要求〕 :
滤波器的初始设计通过手工计算完成; 在计算机辅助计算基础上分析滤波器结构对其性能指标的影响(至少选择两种以 上合适的滤波器结构进行分析); 在计算机辅助计算基础上分析滤波器参数的字长对其性能指标的影响; 以上各项要有理论分析和推导、原程序以及表示计算结果的图表; 课程设计结束时提交设计说明书。
3.主要参考文献:
[1]高息全 丁美玉.《数字信号处理》[M].西安:西安电子科技大学出版社,2008.8 [2]陈怀琛.《数字信号处理教程——MATLAB 释义与实现》[M].北京:电子工业出版 社,2004.12 [3]张德丰.《详解 MATLAB 数字信号处理》[M].北京:电子工业出版社,2010.6 [4]飞思科技产品研发中心.《MATLAB7 辅助信号处理技术与应用》[M].北京:电子工 业出版社,2005.3 [5]胡广书.《数字信号处理—理论、算法与实现》北京:清华大学出版社,2006
4.课程设计工作进度计划: 序号
1 2 3 4 5 6
起 迄 日 期
2012.12.28-2013.12.31 2013.1.1-2013.1.2 2013.1.3-2013.1.5 2013.1.6-2013.1.7 2013.1.8-2013.1.10 2013.1.11-2013.1.14
工 作 内 容
接到题目,搜集资料 整理资料,构思设计方案 手工计算进行滤波器的初步设计 完善初步设计,学习 Matlab 软件操作 通过 Matlab 软件分析设计内容, 逐步落实课题目标 上交课程设计,并做细节修改并完成设计 日期: 年 月 日
主指导教师
-3-现代信号处理(胡广书)第五章 信号的抽取与插值,上采样,下采样 理论
《数字信号处理》课程读书笔记
《数字信号处理》第三版答案(非常详细完整)
数字信号处理期末实验-语音信号分析和处理
相关主题
文本预览