基于RLS算法实现自适应均衡器的MATLAB仿真
1. 实验目的
用RLS算法实现自适应均衡器,画出一次实验的误差平方的收敛曲线,给出最后设计滤波器系数。一次实验的训练序列长度为500。进行20次独立实验,画出误差平方的收敛曲线。
2. 实验原理
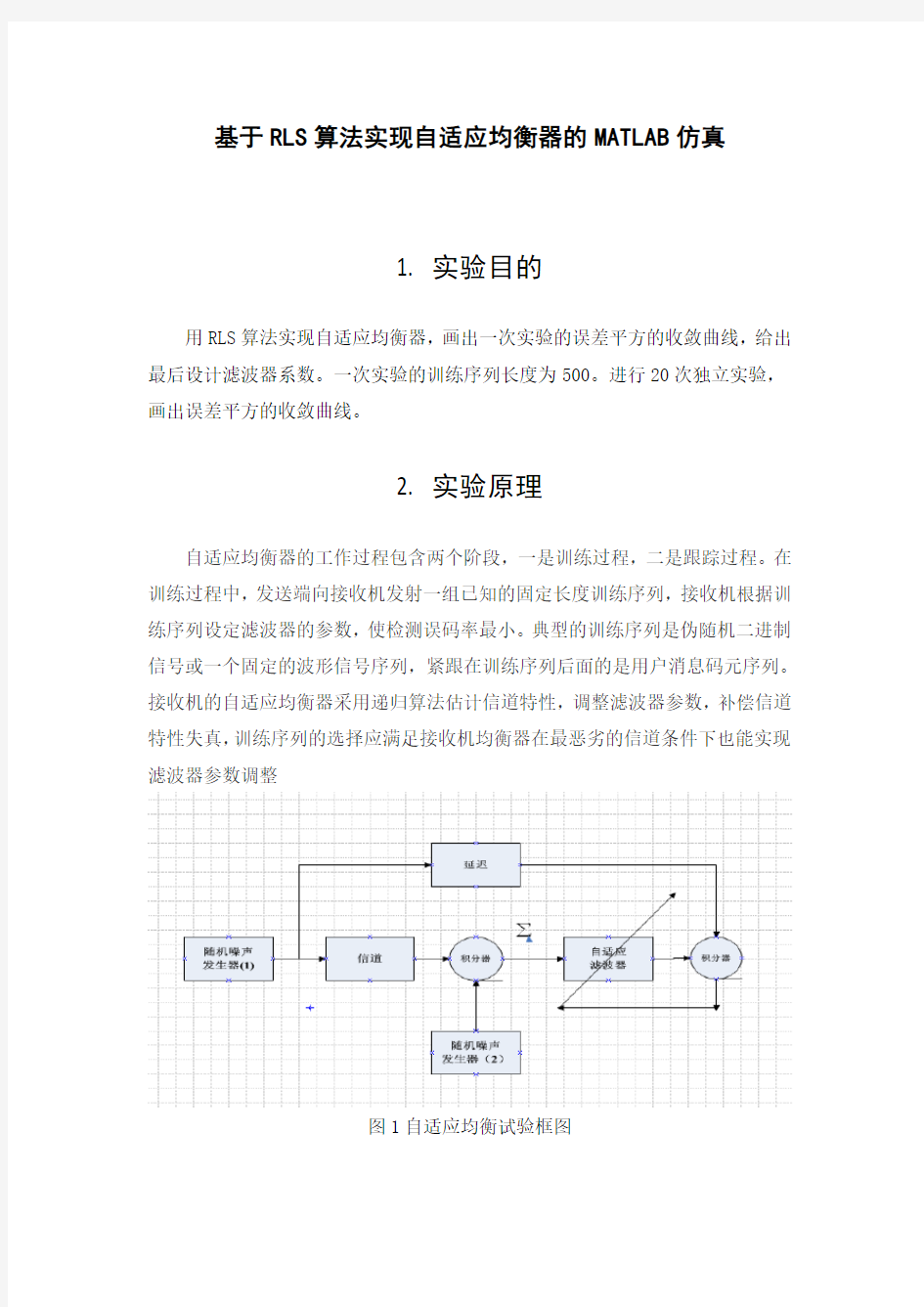
自适应均衡器的工作过程包含两个阶段,一是训练过程,二是跟踪过程。在训练过程中,发送端向接收机发射一组已知的固定长度训练序列,接收机根据训练序列设定滤波器的参数,使检测误码率最小。典型的训练序列是伪随机二进制信号或一个固定的波形信号序列,紧跟在训练序列后面的是用户消息码元序列。接收机的自适应均衡器采用递归算法估计信道特性,调整滤波器参数,补偿信道特性失真,训练序列的选择应满足接收机均衡器在最恶劣的信道条件下也能实现滤波器参数调整
图1自适应均衡试验框图
如图1所示,系统中使用两个独立的随机数发生器,一个用xn来表示,用来测试信道。另一个用v(n)来表示,用来模拟接收器中加性白噪声的影响。序列xn是xn=1的Bernoulli2序列,随变量xn具有零均值和单位方差。第二个序列v(n)具有零均值,其方差v由实验中需要的信噪比决定。均衡器有11个抽头。
3. MATLAB仿真
1. RLS法1次实验
clear;
N=500;
db=25;
sh1=sqrt(10^(-db/10));
u=0.8;
m=0.0001*sh1^2;
error_s=0;
for loop=1:1
w=zeros(1,11)';
p=1/m*eye(11,11);
V=sh1*randn(1,N );
Z=randn(1,N)-0.5;
x=sign(Z);
for n=3:N;
M(n)=0.3*x(n)+0.9*x(n-1)+0.3*x(n-2);
end
z=M+V;
for n=8:N;
d(n)=x(n-7);
end
for n=11:N;
z1=[z(n) z(n-1) z(n-2) z(n-3) z(n-4) z(n-5) z(n-6) z(n-7) z(n-8) z(n-9) z(n-10)]';
k=u^(-1).*p*z1./(1+u^(-1).*z1'*p*z1);
东南大学自动化学院 智能控制概论 神经网络学习算法研究 学院: 姓名: 学号: 日期:
目录 1 任务要求叙述 ..................................................... 错误!未定义书签。 2 系统分析及设计原理 ......................................... 错误!未定义书签。 3 设计实现.............................................................. 错误!未定义书签。4仿真验证.. (6) 5 讨论与分析.......................................................... 错误!未定义书签。
一.任务要求叙述 (1)任务 (a) 运行算法,观察和分析现有学习算法的性能; clear all;close all; nu=20;pi=3.1415926; for i=1:nu p(i)=2*pi*i/nu; t(i)=0.5*(1+cos(p(i))); end minmax=[min(p(:)) max(p(:))] net = newff([ 0 7],[6 1],{'logsig' 'purelin'},'traingd');% traingd traingdm trainlm net.trainParam.epochs = 10000; net.trainParam.goal = 0.0001; net.trainParam.show=200; net.trainParam.lr=0.1; net.trainParam.mc=0.6; %0.9 default value; available for momentum net = train(net,p,t); y1 = sim(net,p); figure(2); plot(p,t,'*-',p,y1,'r--') %************** test data ****************** nu2=nu*3/2; for i=1:(nu2) p2(i)=2*pi*i/(nu2); t2(i)=0.5*(1+cos(p2(i))); end y2 = sim(net,p2); figure(3); plot(t2,'*-');hold on; plot(y2,'r'); xlabel('times');ylabel('outputs'); figure(4); plot(t2-y2); xlabel('times');ylabel('error'); (b) 为了进一步提高学习逼近效果,可以采取那些措施,调节规律如何?根据所提的每种措施,修改算法程序,给出仿真效果验证、过程以及相应的曲线图,给出适当的评述;(c) 联系、结合前向神经网络的算法样本学习、测试等过程,谈谈本人对神经网络系统的一些认识和看法。
时域有限差分法的Matlab仿真 关键词: Matlab 矩形波导时域有限差分法 摘要:介绍了时域有限差分法的基本原理,并利用Matlab仿真,对矩形波导谐振腔中的电磁场作了模拟和分析。 关键词:时域有限差分法;Matlab;矩形波导;谐振腔 目前,电磁场的时域计算方法越来越引人注目。时域有限差分(Finite Difference Time Domain,FDTD)法[1]作为一种主要的电磁场时域计算方法,最早是在1966年由K. S. Yee提出的。这种方法通过将Maxwell旋度方程转化为有限差分式而直接在时域求解,通过建立时间离散的递进序列,在相互交织的网格空间中交替计算电场和磁场。经过三十多年的发展,这种方法已经广泛应用到各种电磁问题的分析之中。 Matlab作为一种工程仿真工具得到了广泛应用[2]。用于时域有限差分法,可以简化编程,使研究者的研究重心放在FDTD法本身上,而不必在编程上花费过多的时间。 下面将采用FDTD法,利用Matlab仿真来分析矩形波导谐振腔的电磁场,说明了将二者结合起来的优越性。 1FDTD法基本原理 时域有限差分法的主要思想是把Maxwell方程在空间、时间上离散化,用差分方程代替一阶偏微分方程,求解差分方程组,从而得出各网格单元的场值。FDTD 空间网格单元上电场和磁场各分量的分布如图1所示。 电场和磁场被交叉放置,电场分量位于网格单元每条棱的中心,磁场分量位于网格单元每个面的中心,每个磁场(电场)分量都有4个电场(磁场)分量环绕。这样不仅保证了介质分界面上切向场分量的连续性条件得到自然满足,而且
还允许旋度方程在空间上进行中心差分运算,同时也满足了法拉第电磁感应定律和安培环路积分定律,也可以很恰当地模拟电磁波的实际传播过程。 1.1Maxwell方程的差分形式 旋度方程为: 将其标量化,并将问题空间沿3个轴向分成若干网格单元,用Δx,Δy和Δz 分别表示每个网格单元沿3个轴向的长度,用Δt表示时间步长。网格单元顶点的坐标(x,y,z)可记为: 其中:i,j,k和n为整数。 同时利用二阶精度的中心有限差分式来表示函数对空间和时间的偏导数,即可得到如下FDTD基本差分式: 由于方程式里出现了半个网格和半个时间步,为了便于编程,将上面的差分式改写成如下形式:
3.3.2 各种BP学习算法MATLAB仿真 根据上面一节对BP神经网络的MATLAB设计,可以得出下面的通用的MATLAB程序段,由于各种BP学习算法采用了不同的学习函数,所以只需要更改学习函数即可。 MATLAB程序段如下: x=-4:0.01:4; y1=sin((1/2)*pi*x)+sin(pi*x); %trainlm函数可以选择替换 net=newff(minmax(x),[1,15,1],{'tansig','tansig','purelin'},'trainlm'); net.trainparam.epochs=2000; net.trainparam.goal=0.00001; net=train(net,x,y1); y2=sim(net,x); err=y2-y1; res=norm(err); %暂停,按任意键继续 Pause %绘图,原图(蓝色光滑线)和仿真效果图(红色+号点线) plot(x,y1); hold on plot(x,y2,'r+'); 注意:由于各种不确定因素,可能对网络训练有不同程度的影响,产生不同的效果。如图3-8。 标准BP算法(traingd)
图3-8 标准BP算法的训练过程以及结果(原图蓝色线,仿真图+号线)增加动量法(traingdm) 如图3-9。 图3-9 增加动量法的训练过程以及结果(原图蓝色线,仿真图+号线)弹性BP算法(trainrp)如图3-10 图3-10 弹性BP算法的训练过程以及结果(原图蓝色线,仿真图+号线)
动量及自适应学习速率法(traingdx)如图3-11。 图3-11 动量及自适应学习速率法的训练过程以及结果(原图蓝色线,仿真图+号线)共轭梯度法(traincgf)如图3-12。
本文前言 MA TLAB的简介 MATLAB是一种适用于工程应用的各领域分析设计与复杂计算的科学计算软件,由美国Mathworks公司于1984年正式推出,1988年退出3.X(DOS)版本,19992年推出4.X(Windows)版本;19997年腿5.1(Windows)版本,2000年下半年,Mathworks公司推出了他们的最新产品MATLAB6.0(R12)试用版,并于2001年初推出了正式版。随着版本的升级,内容不断扩充,功能更加强大。近几年来,Mathworks公司将推出MATLAB语言运用于系统仿真和实时运行等方面,取得了很多成绩,更扩大了它的应用前景。MATLAB已成为美国和其他发达国家大学教学和科学研究中最常见而且必不可少的工具。 MATLAB是“矩阵实验室”(Matrix Laboratory)的缩写,它是一种以矩阵运算为基础的交互式程序语言,着重针对科学计算、工程计算和绘图的需要。在MATLAB中,每个变量代表一个矩阵,可以有n*m个元素,每个元素都被看做复数摸索有的运算都对矩阵和复数有效,输入算式立即可得结果,无需编译。MATLAB强大而简易的做图功能,能根据输入数据自动确定坐标绘图,能自定义多种坐标系(极坐标系、对数坐标系等),讷讷感绘制三维坐标中的曲线和曲面,可设置不同的颜色、线形、视角等。如果数据齐全,MATLAB通常只需要一条命令即可做图,功能丰富,可扩展性强。MATLAB软件包括基本部分和专业扩展部分,基本部分包括矩阵的运算和各种变换、代数和超越方程的求解、数据处理和傅立叶变换及数值积分风,可以满足大学理工科学生的计算需要,扩展部分称为工具箱,它实际上使用MATLAB的基本语句编成的各种子程序集,用于解决某一方面的问题,或实现某一类的新算法。现在已经有控制系统、信号处理、图象处理、系统辨识、模糊集合、神经元网络及小波分析等多种工具箱,并且向公式推倒、系统仿真和实时运行等领域发展。MATLAB语言的难点是函数较多,仅基本部分就有七百多个,其中常用的有二三百个。 MATLAB在国内外的大学中,特别是数值计算应用最广的电气信息类学科中,已成为每个学生都应该掌握的工具。MATLAB大大提高了课程教学、解题作业、分析研究的效率。
tic figure(1);hold on ezplot('x*sin(10*pi*x)+2',[-1,2]); %% 参数设置 fishnum=50; %生成50只人工鱼 MAXGEN=50; %最多迭代次数 try_number=100;%最多试探次数 visual=1; %感知距离 delta=0.618; %拥挤度因子 step=0.1; %步长 %% 初始化鱼群 lb_ub=[-1,2,1]; X=AF_init(fishnum,lb_ub); LBUB=[]; fori=1:size(lb_ub,1) LBUB=[LBUB;repmat(lb_ub(i,1:2),lb_ub(i,3),1)]; end gen=1; BestY=-1*ones(1,MAXGEN); %每步中最优的函数值 BestX=-1*ones(1,MAXGEN); %每步中最优的自变量 besty=-100; %最优函数值 Y=AF_foodconsistence(X); while gen<=MAXGEN fprintf(1,'%d\n',gen) fori=1:fishnum %% 聚群行为 [Xi1,Yi1]=AF_swarm(X,i,visual,step,delta,try_number,LBUB,Y); %% 追尾行为 [Xi2,Yi2]=AF_follow(X,i,visual,step,delta,try_number,LBUB,Y); if Yi1>Yi2 X(:,i)=Xi1; Y(1,i)=Yi1; else X(:,i)=Xi2; Y(1,i)=Yi2; end end [Ymax,index]=max(Y); figure(1); plot(X(1,index),Ymax,'.','color',[gen/MAXGEN,0,0]) ifYmax>besty besty=Ymax; bestx=X(:,index); BestY(gen)=Ymax;
编程方式实现: 1.惩罚函数 function f=fun(x,r) f=x(1,1)^2+x(2,1)^2-r*log(x(1,1)-1); 2.步长的函数 function f=fh(x0,h,s,r) %h为步长 %s为方向 %r为惩罚因子 x1=x0+h*s; f=fun(x1,r); 3. 步长寻优函数 function h=fsearchh(x0,r,s) %利用进退法确定高低高区间,利用黄金分割法进行求解h1=0;%步长的初始点 st=0.001; %步长的步长 h2=h1+st; f1=fh(x0,h1,s,r); f2=fh(x0,h2,s,r); if f1>f2 h3=h2+st; f3=fh(x0,h3,s,r); while f2>f3 h1=h2; h2=h3; h3=h3+st; f2=f3; f3=fh(x0,h3,s,r); end else st=-st; v=h1; h1=h2; h2=v; v=f1; f1=f2; f2=v; h3=h2+st; f3=fh(x0,h3,s,r); while f2>f3 h1=h2; h2=h3; h3=h3+st; f2=f3;
f3=fh(x0,h3,s,r); end end %得到高低高的区间 a=min(h1,h3); b=max(h1,h3); %利用黄金分割点法进行求解 h1=1+0.382*(b-a); h2=1+0.618*(b-a); f1=fh(x0,h1,s,r); f2=fh(x0,h2,s,r); while abs(a-b)>0.0001 if f1>f2 a=h1; h1=h2; f1=f2; h2=a+0.618*(b-a); f2=fh(x0,h2,s,r); else b=h2; h2=h1; f2=f1; h1=a+0.382*(b-a); f1=fh(x0,h1,s,r); end end h=0.5*(a+b); 4. 迭代点的寻优函数 function f=fsearchx(x0,r,epson) x00=x0; m=length(x0); s=zeros(m,1); for i=1:m s(i)=1; h=fsearchh(x0,r,s); x1=x0+h*s; s(i)=0; x0=x1; end while norm(x1-x00)>epson x00=x1; for i=1:m s(i)=1; h=fsearchh(x0,r,s);
第一章插值方法 1.1Lagrange插值 1.2逐步插值 1.3分段三次Hermite插值 1.4分段三次样条插值 第二章数值积分 2.1 Simpson公式 2.2 变步长梯形法 2.3 Romberg加速算法 2.4 三点Gauss公式 第三章常微分方程德差分方法 3.1 改进的Euler方法 3.2 四阶Runge-Kutta方法 3.3 二阶Adams预报校正系统 3.4 改进的四阶Adams预报校正系统 第四章方程求根 4.1 二分法 4.2 开方法 4.3 Newton下山法 4.4 快速弦截法 第五章线性方程组的迭代法 5.1 Jacobi迭代 5.2 Gauss-Seidel迭代 5.3 超松弛迭代 5.4 对称超松弛迭代 第六章线性方程组的直接法 6.1 追赶法 6.2 Cholesky方法 6.3 矩阵分解方法 6.4 Gauss列主元消去法
第一章插值方法 1.1Lagrange插值 计算Lagrange插值多项式在x=x0处的值. MATLAB文件:(文件名:Lagrange_eval.m)function [y0,N]= Lagrange_eval(X,Y,x0) %X,Y是已知插值点坐标 %x0是插值点 %y0是Lagrange插值多项式在x0处的值 %N是Lagrange插值函数的权系数 m=length(X); N=zeros(m,1); y0=0; for i=1:m N(i)=1; for j=1:m if j~=i; N(i)=N(i)*(x0-X(j))/(X(i)-X(j)); end end y0=y0+Y(i)*N(i); end 用法》X=[…];Y=[…]; 》x0= ; 》[y0,N]= Lagrange_eval(X,Y,x0) 1.2逐步插值 计算逐步插值多项式在x=x0处的值. MATLAB文件:(文件名:Neville_eval.m)function y0=Neville_eval(X,Y,x0) %X,Y是已知插值点坐标 %x0是插值点 %y0是Neville逐步插值多项式在x0处的值 m=length(X); P=zeros(m,1); P1=zeros(m,1); P=Y; for i=1:m P1=P; k=1; for j=i+1:m k=k+1;
PID 控制算法的matlab 仿真 PID 控制算法就是实际工业控制中应用最为广泛的控制算法,它具有控制器设计简单,控制效果好等优点。PID 控制器参数的设置就是否合适对其控制效果具有很大的影响,在本课程设计中一具有较大惯性时间常数与纯滞后的一阶惯性环节作为被控对象的模型对PID 控制算法进行研究。被控对象的传递函数如下: ()1d s f Ke G s T s τ-= + 其中各参数分别为30,630,60f d K T τ===。MATLAB 仿真框图如图1所示。 图1 2 具体内容及实现功能 2、1 PID 参数整定 PID 控制器的控制参数对其控制效果起着决定性的作用,合理设置控制参数就是取得较好的控制效果的先决条件。常用的PID 参数整定方法有理论整定法与实验整定法两类,其中常用的实验整定法由扩充临界比例度法、试凑法等。在此处选用扩充临界比例度法对PID 进行整定,其过程如下: 1) 选择采样周期 由于被控对象中含有纯滞后,且其滞后时间常数为 60d τ=,故可选择采样周期1s T =。 2) 令积分时间常数i T =∞,微分时间常数0d T =,从小到大调节比例系数K , 使得系统发生等幅震荡,记下此时的比例系数k K 与振荡周期k T 。 3) 选择控制度为 1.05Q =,按下面公式计算各参数:
0.630.490.140.014p k i k d k s k K K T T T T T T ==== 通过仿真可得在1s T =时,0.567,233k k K T ==,故可得: 0.357,114.17,32.62, 3.262p i d s K T T T ==== 0.0053.57 p s i i p d d s K T K T K T K T === = 按此组控制参数得到的系统阶跃响应曲线如图2所示。 01002003004005006007008009001000 0.20.40.60.811.21.41.6 1.8 图2 由响应曲线可知,此时系统虽然稳定,但就是暂态性能较差,超调量过大,且响应曲线不平滑。根据以下原则对控制器参数进行调整以改善系统的暂态过程: 1) 通过减小采样周期,使响应曲线平滑。 2) 减小采样周期后,通过增大积分时间常数来保证系统稳定。 3) 减小比例系数与微分时间常数,以减小系统的超调。 改变控制器参数后得到系统的阶跃响应曲线如图3所示,系统的暂态性能得到明显改善、
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、SIMULINK 的使用 MATLAB 中SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。利用SIMULINK 功能模块可以快速的建立控制系统的模型,进行仿真和调试。 1.运行MATLAB 软件,在命令窗口栏“>>”提示符下键入simulink 命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK 仿真 环境下。 2.选择File 菜单下New 下的Model 命令,新建一个simulink 仿真环境常规模板。 3.在simulink 仿真环境下,创建所需要的系统 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G 实验处理:1)(1=s G SIMULINK 仿真模型
波形图为: 实验处理:2)(1=s G SIMULINK 仿真模型 波形图为: 实验结果分析:增加比例函数环节以后,系统的输出型号将输入信号成倍数放大. ② 惯性环节11)(1+= s s G 和15.01)(2+=s s G 实验处理:1 1 )(1+=s s G SIMULINK 仿真模型
波形图为: 实验处理:1 5.01 )(2+= s s G SIMULINK 仿真模型 波形图为: 实验结果分析:当1 1 )(1+= s s G 时,系统达到稳定需要时间接近5s,当
自适应滤波器 MATLAB仿真 摘要 : 本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS( Least mean squares )算法。以一个例子演示了自适应滤波器的滤波效果。实验结果表明,该滤波器滤波效果较好。 关键词:自适应滤波器 MATLAB7.0 LMS 算法 Simulate of adaptive filter based on MATLAB7.0 Abstract: This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single. Key words: LMS algorithm Adaptive Filter Matlab7.0 1引言 由 Widrow B 等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。 2自适应滤波原理及 LMS算法 2.1 自适应滤波原理 图 1 自适应滤波原理图 在自适应滤波器中,参数可调的数字滤波器一般为 FIR 数字滤波器, IIR 数字滤波器或格型数字滤波器。自适应滤波分 2 个过程。第一,输入信号想 x(n) 通过参数可调的数字滤波器后得输出信号 y(n) ,y(n) 与参考信号 d(n) 进行比较得误差信号 e(n) ;第二,通过一种自适应算法和 x(n) 和 e(n) 的值来调节参数可调的数字滤波器的参数,即加权系
一.信道均衡的概念 实际的基带传输系统不可能完全满足无码间串扰传输条件,因而码间串扰是不可避免的。当串扰严重时,必须对系统的传输函数 进行校正,使其达到或接近无码间串扰要求的特性。理论和实践表明,在基带系统中插入一种可调滤波器就可以补偿整个系统的幅频,和相频特性从而减小码间串扰的影响这个对系统校正的过程称为均衡,实现均衡的滤波器称为均衡器。 均衡分为频域均衡和时域均衡。频域均衡是从频率响应考虑,使包括均衡器在内的整个系统的总传输函数满足无失真传输条件。而时域均衡,则是直接从时间响应考虑,使包括均衡器在内的整个系统的冲激响应满足无码间串扰条件。 频域均衡在信道特性不变,且传输低速率数据时是适用的,而时域均衡可以根据信道特性的变化进行调整,能够有效地减小码间串扰,故在高速数据传输中得以广泛应用。 时域均衡的实现方法有多种,但从实现的原理上看,大致可分为预置式自动均衡和自适应式自动均衡。预置式均衡是在实际传数之前先传输预先规定的测试脉冲(如重复频率很低的周期性的单脉冲波形),然后按“迫零调整原理”自动或手动调整抽头增益;自适应式均衡是在传数过程中连续测出距最佳调整值的误差电压,并据此电压去调整各抽头增益。一般地,自适应均衡不仅可以使调整精度提高,而且当信道特性随时间变化时又能有一定的自适应性,因此很受重视。这种均衡器过去实现起来比较复杂,但随着大规模、超大规模集成电路和微处理机的应用,其发展十分迅速。 二.信道均衡的应用 1.考虑如图所示的基带等效数据传输系统,发送信号k x 经过ISI 失真信道传输,叠加高斯加性噪声。 图1基带等效数据传输模型 设发送信号采用QPSK 调制,即(1)k x j =±±ISI 信道的冲击响应以向量的形式表示为h 2211[,,,]T L L L h h h --+=???。典型的ISI 信道响应向量有三种: h [0.04,0.05,0.07,0.21,0.5,0.72,0.36,0,0.21,0.03,0.07]T A =--- h [0.407,0.815,0.407]T B = h [0.227,0.46,0.6888,0.46,0.227]T C = k ω为实部与虚部独立的复高斯白噪声,其均值为零,方差为2 ωσ。 2.实现目的
第8章 常微分方程初值问题数值解法 8.1 引言 8.2 欧拉方法 8.3 龙格-库塔方法 8.4 单步法的收敛性与稳定性 8.5 线性多步法
8.1 引 言 考虑一阶常微分方程的初值问题 00(,),[,],(). y f x y x a b y x y '=∈=(1.1) (1.2) 如果存在实数 ,使得 121212(,)(,).,R f x y f x y L y y y y -≤-?∈(1.3) 则称 关于 满足李普希茨(Lipschitz )条件, 称为 的李普希茨常数(简称Lips.常数). 0>L f y L f (参阅教材386页)
计算方法及MATLAB 实现 所谓数值解法,就是寻求解 在一系列离散节点 )(x y <<<<<+121n n x x x x 上的近似值 . ,,,,,121+n n y y y y 相邻两个节点的间距 称为步长. n n n x x h -=+1 如不特别说明,总是假定 为定数, ),2,1( ==i h h i 这时节点为 . ) ,2,1,0(0 =+=i nh x x n 初值问题(1.1),(1.2)的数值解法的基本特点是采取 “步进式”. 即求解过程顺着节点排列的次序一步一步地向前推进. 00(,),[,], (). y f x y x a b y x y '=∈=
描述这类算法,只要给出用已知信息 ,,,21--n n n y y y 计算 的递推公式. 1+n y 一类是计算 时只用到前一点的值 ,称为单步法. 1+n y n y 另一类是用到 前面 点的值 , 1+n y k 11,,,+--k n n n y y y 称为 步法. k 其次,要研究公式的局部截断误差和阶,数值解 与 精确解 的误差估计及收敛性,还有递推公式的计算 稳定性等问题. n y )(n x y 首先对方程 离散化,建立求数值解的递推 公式. ),(y x f y ='
用MATLAB实现结构可靠度计算 口徐华…朝泽刚‘u刘勇‘21 。 (【l】中国地质大学(武汉工程学院湖北?武汉430074; 12】河海大学土木工程学院江苏?南京210098 摘要:Matlab提供了各种矩阵的运算和操作,其中包含结构可靠度计算中常用的各种数值计算方法工具箱,本文从基本原理和相关算例分析两方面,阐述利用Matlab,编制了计算结构可靠度Matlab程.序,使得Matlab-语言在可靠度计算中得到应用。 关键词:结构可靠度Matlab软件最优化法 中图分类号:TP39文献标识码:A文章编号:1007-3973(200902-095-Ol 1结构可靠度的计算方法 当川概率描述结构的可靠性时,计算结构可靠度就是计算结构在规定时问内、规定条件F结构能够完成预定功能的概率。 从简单到复杂或精确稃度的不同,先后提出的可靠度计算方法有一次二阶矩方法、二次二阶矩方法、蒙特卡洛方法以及其他方法。一次■阶矩方法又分为。I-心点法和验算点法,其中验算点法足H前可靠度分析最常川的方法。 2最优化方法计算可靠度指标数学模型 由结构111n个任意分布的独立随机变量一,x:…以表示的结构极限状态方程为:Z=g(■.托…t=0,采用R-F将非正念变量当罱正态化,得到等效正态分布的均值o:和标准差虹及可靠度指标B,由可靠度指标B的几何意义知。o;辟
开始时验算点未知,把6看成极限状态曲面上点P(■,爿:---37,的函数,通过优化求解,找到B最小值。求解可靠皮指标aJ以归结为以下约束优化模型: rain睁喜t华,2 s.,.Z=g(工i,x2’,…,工:=0 如极限状态方栉巾某个变最(X。可用其他变量表示,则上述模型jfIJ‘转化为无约束优化模型: 。。B!:手f生丛r+阻:坚:坠:盐尘}二剐 t∞oY?’【叫,J 3用MATLAB实现结构可靠度计算 3.1Matlab简介 Matlab是++种功能强、效率高、便.丁.进行科学和工程计算的交互式软件包,汇集了人量数学、统计、科学和工程所需的函数,MATI.AB具有编程简甲直观、用户界mf友善、开放性强等特点。将MATLAB用于蒙特卡罗法的一个显著优点是它拥有功能强大的随机数发生器指令。 3.2算例 3.2.I例:已知非线形极限状态方程z=g(t r'H=567f r-0.5H2=0’f、r服从正态分布。IIf=0.6,o r=0.0786;la|_ 2.18,o r_0.0654;H服从对数正态分布。u H= 3218,O。 =0.984。f、r、H相互独立,求可靠度指标B及验算点(,,r’,H‘。 解:先将H当量正念化:h=ln H服从正态分布,且 ,‘-““了:等专虿’=,。49?口二-、『五ir面_。。3
作者:夏云木子 1、 >> syms re(x) re(y) re(z) >> input('计算相对误差:'),re(x)=10/1991,re(y)=0.0001/1.991,re(y)=0.0000001/0.0001991 所以可知re(y)最小,即y精度最高 2、 >> format short,A=sqrt(2) >> format short e,B=sqrt(2) >> format short g,C=sqrt(2)
>> format long,D=sqrt(2) >> format long e,E=sqrt(2) >> format long g,F=sqrt(2) >> format bank,H=sqrt(2) >> format hex,I=sqrt(2) >> format +,J=sqrt(2) >> format,K=sqrt(2)
3、 >> syms A >> A=[sqrt(3) exp(7);sin(5) log(4)];vpa(pi*A,6) 4、1/6251-1/6252=1/6251*6252 5、(1)1/(1+3x)-(1-x)/(1+x)=x*(3*x-1)/[(1+3*x)*(1+x)] (2) sqrt(x+1/x)-sqrt(x-1/x)=2/x/[sqrt(x-1/x)+sqrt(x+1/x)] (3) log10(x1)-log(x2)=log10(x1/x2) (4) [1-cos(2*x)]/x =x^2/factorial(2)-x^4/factorial(4)+x^6/factorial(6)-…
1、Newdon迭代法求解非线性方程 function [x k t]=NewdonToEquation(f,df,x0,eps) %牛顿迭代法解线性方程 %[x k t]=NewdonToEquation(f,df,x0,eps) %x:近似解 %k:迭代次数 %t:运算时间 %f:原函数,定义为内联函数 ?:函数的倒数,定义为内联函数 %x0:初始值 %eps:误差限 % %应用举例: %f=inline('x^3+4*x^2-10'); ?=inline('3*x^2+8*x'); %x=NewdonToEquation(f,df,1,0.5e-6) %[x k]=NewdonToEquation(f,df,1,0.5e-6) %[x k t]=NewdonToEquation(f,df,1,0.5e-6) %函数的最后一个参数也可以不写。默认情况下,eps=0.5e-6 %[x k t]=NewdonToEquation(f,df,1) if nargin==3 eps="0".5e-6; end tic; k=0; while 1 x="x0-f"(x0)./df(x0); k="k"+1; if abs(x-x0) < eps || k >30 break; end x0=x; end t=toc; if k >= 30 disp('迭代次数太多。'); x="0"; t="0"; end
2、Newdon迭代法求解非线性方程组 function y="NewdonF"(x) %牛顿迭代法解非线性方程组的测试函数 %定义是必须定义为列向量 y(1,1)=x(1).^2-10*x(1)+x(2).^2+8; y(2,1)=x(1).*x(2).^2+x(1)-10*x(2)+8; return; function y="NewdonDF"(x) %牛顿迭代法解非线性方程组的测试函数的导数 y(1,1)=2*x(1)-10; y(1,2)=2*x(2); y(2,1)=x(2).^+1; y(2,2)=2*x(1).*x(2)-10; return; 以上两个函数仅供下面程序的测试 function [x k t]=NewdonToEquations(f,df,x0,eps) %牛顿迭代法解非线性方程组 %[x k t]=NewdonToEquations(f,df,x0,eps) %x:近似解 %k:迭代次数 %t:运算时间 %f:方程组(事先定义) ?:方程组的导数(事先定义) %x0:初始值 %eps:误差限 % %说明:由于虚参f和df的类型都是函数,使用前需要事先在当前目录下采用函数M文件定义% 另外在使用此函数求解非线性方程组时,需要在函数名前加符号“@”,如下所示 % %应用举例: %x0=[0,0];eps=0.5e-6; %x=NewdonToEquations(@NewdonF,@NewdonDF,x0,eps) %[x k]=NewdonToEquations(@NewdonF,@NewdonDF,x0,eps) %[x k t]=NewdonToEquations(@NewdonF,@NewdonDF,x0,eps) %函数的最后一个参数也可以不写。默认情况下,eps=0.5e-6 %[x k t]=NewdonToEquations(@NewdonF,@NewdonDF,x0,eps)
时域有限差分法对平面TE波的 MATLAB仿真 摘要 时域有限差分法是由有限差分法发展出来的数值计算方法。自1966年Yee 在其论文中首次提出时域有限差分以来,时域有限差分法在电磁研究领域得到了广泛的应用。主要有分析辐射条线、微波器件和导行波结构的研究、散射和雷达截面计算、分析周期结构、电子封装和电磁兼容的分析、核电磁脉冲的传播和散射以及在地面的反射及对电缆传输线的干扰、微光学元器件中光的传播和衍射特性等等。 由于电磁场是以场的形态存在的物质,具有独特的研究方法,采取重叠的研究方法是其重要的特点,即只有理论分析、测量、计算机模拟的结果相互佐证,才可以认为是获得了正确可信的结论。时域有限差分法就是实现直接对电磁工程问题进行计算机模拟的基本方法。在近年的研究电磁问题中,许多学者对时域脉冲源的传播和响应进行了大量的研究,主要是描述物体在瞬态电磁源作用下的理论。另外,对于物体的电特性,理论上具有几乎所有的频率成分,但实际上,只有有限的频带内的频率成分在区主要作用。 文中主要谈到了关于高斯制下完全匹配层的差分公式的问题,通过MATLAB 程序对TE波进行了仿真,模拟了高斯制下完全匹配层中磁场分量瞬态分布。得到了相应的磁场幅值效果图。 关键词:时域有限差分完全匹配层MATLAB 磁场幅值效果图
目录 摘要 (1) 目录 (3) 第一章绪论 (4) 1.1 课题背景与意义 (4) 1.2 时域有限差分法的发展与应用 (4) 2.1 Maxwell方程和Yee氏算法 (7) 2.2 FDTD的基本差分方程 (9) 2.3 时域有限差分法相关技术 (11) 2.3.1 数值稳定性问题 (11) 2.3.2 数值色散 (12) 2.3.3 离散网格的确定 (13) 2.4 吸收边界条件 (13) 2.4.1 一阶和二阶近似吸收边界条件 (14) 2.4.2 二维棱边及角顶点的处理 (17) 2.4.3 完全匹配层 (19) 2.5 FDTD计算所需时间步的估计 (23) 第三章MATLAB的仿真的程序及模拟 (25) 3.1 MATLAB程序及相应说明 (25) 3.2 出图及结果 (28) 3.2.1程序部分 (28) 3.2.2 所出的效果图 (29) 第四章结论 (31) 参考文献 (32)
信息系统分析与设计作业 层次分析法确定绩效评价权重在matlab中的实现 小组成员:孙高茹、王靖、李春梅、郭荣1 程序简要概述 编写程序一步实现评价指标特征值lam、特征向量w以及一致性比率CR的求解。 具体的操作步骤是:首先构造评价指标,用专家评定法对指标两两打分,构建比较矩阵,继而运用编写程序实现层次分析法在MATLAB中的应用。 通过编写MATLAB程序一步实现问题求解,可以简化权重计算方法与步骤,减少工作量,从而提高人力资源管理中绩效考核的科学化电算化。 2 程序在matlab中实现的具体步骤 function [w,lam,CR] = ccfx(A) %A为成对比较矩阵,返回值w为近似特征向量 % lam为近似最大特征值λmax,CR为一致性比率 n=length(A(:,1)); a=sum(A); B=A %用B代替A做计算 for j=1:n %将A的列向量归一化 B(:,j)=B(:,j)./a(j); end s=B(:,1); for j=2:n s=s+B(:,j); end c=sum(s);%计算近似最大特征值λmax w=s./c; d=A*w lam=1/n*sum((d./w)); CI=(lam-n)/(n-1);%一致性指标 RI=[0,0,0.58,0.90,1.12,1.24,1.32,1.41,1.45,1.49,1.51];%RI为随机一致
性指标 CR=CI/RI(n);%求一致性比率 if CR>0.1 disp('没有通过一致性检验'); else disp('通过一致性检验'); end end 3 案例应用 我们拟构建公司员工绩效评价分析权重,完整操作步骤如下: 3.1构建的评价指标体系 我们将影响员工绩效评定的指标因素分为:打卡、业绩、创新、态度与品德。 3.2专家打分,构建两两比较矩阵 A = 1.0000 0.5000 3.0000 4.0000 2.0000 1.0000 5.0000 3.0000 0.3333 0.2000 1.0000 2.0000 0.2500 0.3333 0.5000 1.0000 3.3在MATLAB中运用编写好的程序实现 直接在MATLAB命令窗口中输入 [w,lam,CR]=ccfx(A) 继而直接得出 d = 1.3035 2.0000 0.5145 0.3926 w = 0.3102 0.4691 0.1242 0.0966 lam =4.1687
本文前言 MATLAB的简介 MATLAB是一种适用于工程应用的各领域分析设计与复杂计算的科学计算软件,由美国Mathworks公司于1984年正式推出,1988年退出3.X(DOS)版本,19992年推出4.X(Windows)版本;19997年腿5.1(Windows)版本,2000年下半年,Mathworks公司推出了他们的最新产品MATLAB6.0(R12)试用版,并于2001年初推出了正式版。随着版本的升级,内容不断扩充,功能更加强大。近几年来,Mathworks公司将推出MATLAB语言运用于系统仿真和实时运行等方面,取得了很多成绩,更扩大了它的应用前景。MATLAB已成为美国和其他发达国家大学教学和科学研究中最常见而且必不可少的工具。 MATLAB是“矩阵实验室”(Matrix Laboratory)的缩写,它是一种以矩阵运算为基础的交互式程序语言,着重针对科学计算、工程计算和绘图的需要。在MATLAB中,每个变量代表一个矩阵,可以有n*m个元素,每个元素都被看做复数摸索有的运算都对矩阵和复数有效,输入算式立即可得结果,无需编译。MATLAB强大而简易的做图功能,能根据输入数据自动确定坐标绘图,能自定义多种坐标系(极坐标系、对数坐标系等),讷讷感绘制三维坐标中的曲线和曲面,可设置不同的颜色、线形、视角等。如果数据齐全,MATLAB通常只需要一条命令即可做图,功能丰富,可扩展性强。MATLAB软件包括基本部分和专业扩展部分,基本部分包括矩阵的运算和各种变换、代数和超越方程的求解、数据处理和傅立叶变换及数值积分风,可以满足大学理工科学生的计算需要,扩展部分称为工具箱,它实际上使用MATLAB的基本语句编成的各种子程序集,用于解决某一方面的问题,或实现某一类的新算法。现在已经有控制系统、信号处理、图象处理、系统辨识、模糊集合、神经元网络及小波分析等多种工具箱,并且向公式推倒、系统仿真和实时运行等领域发展。MATLAB语言的难点是函数较多,仅基本部分就有七百多个,其中常用的有二三百个。 MATLAB在国内外的大学中,特别是数值计算应用最广的电气信息类学科中,已成为每个学生都应该掌握的工具。MATLAB大大提高了课程教学、解题作业、分析研究的效率。
计算方法作业(作者:夏云木子) 1、help linspace type linspace 2、a1=[5 12 47;13 41 2;9 6 71];a2=[12 9;6 15;7 21];B=a1*a2, C=a1(:,1:2).*a2, D=a1.^2,
E=a1(:).^2 3、a1=[5 12 47;13 41 2;9 6 71];a2=[12 9;6 15;7 21];a1(4:5,1:3)=a2.';a1([4 5],:)=a1([5 4],:);b1=a1
c1=b1(4,1),c2=b1(5,3),D=b1(3:4,:)*a2 4、a1=[5 12 47;13 41 2;9 6 71]; E=eye(3,3); S = a1 + 5*a1' - E, S1=a1^3-rot90(a1)^2+6*E 5、a1=[5 12 47;13 41 2;9 6 71];s=5;A=s-a1,B=s*a1,C=s.*a1,D=s./a1,E=a1./s
6、c=[1 2 3 4;5 6 7 8;9 10 11 12;13 14 15 16];A=c^-4,B=(c^3)^-1,C=(3*c+5*c^-1)/5
7、a=[1 i 3;9i 2-i 8;7 4 8+i];A=a.' 8、abc=[-2.57 8.87;-0.57 3.2-5.5i];m1=sign(abc),m2=round(abc),m3=floor(abc) Sign为符号函数,round表示四舍五入取整,floor表示舍去小数部分取整
9、x=[1 4 3 2 0 8 10 5]';y=[8 0 0 4 2 1 9 11]';A=dot(x,y) 10、a=[3.82 5.71 9.62];b=[7.31 6.42 2.48];A=dot(a,b),B=cross(a,b) 11、P=[5 7 8 0 1];Pf=poly(P);Px=poly2str(Pf,'x') 12、P=[3 0 9 60 0 -90];K1=polyval(P,45),K2=polyval(P,-123),K3=polyval(P,579) 13、P1=[13 55 0 -17 9];P2=[63 0 26 -85 0 105];PP=conv(P1,P2);P1P2=poly2str(PP,'x'),[Q,r]=deconv(P2,P1)