叶片荧光测量实验报告
1.实验目的
2.实验方法
利用PAM100,荧光成像系统测量叶绿素荧光
3.实验原理及一些参数的意义
荧光的变化反映光合与热耗散的变化。
光化学淬灭(Photochemical Quenching):由于光合作用引起的荧光下降,反映了光合活性的高低。
qP=(Fm’-Fs)/Fv’=1-(Fs-Fo’)/(Fm’-Fo’) (基于“沼泽模型”)
qL=(Fm’-F)/(Fm’-Fo’)·Fo’/F=qP·Fo’/F (基于“湖泊模型”)
非光化学淬灭(Non-Photochemical Quenching):由于热耗散引起的荧光下降。
qN=(Fv-Fv’)/Fv=1-(Fm’-Fo’)/(Fm-Fo)
NPQ=(Fm-Fm’)/Fm’=Fm/Fm’-1 ,不需测定Fo’,适合野外调查qN或NPQ反映了植物耗散过剩光能转化为热的能力,反映了植物的光保护能力。
Fv/Fm =(Fm-Fo)/Fm : PS II的最大量子效率,反映植物潜在最大光合能力,高等植物一般在0.8-0.84之间,当植物受到胁迫(Stress)时,Fv/Fm显著下降。
ΦPS II = Yield = (Fm’-Fs)/Fm’ = ΔF/Fm’= qP·Fv’/Fm’: 任一光照状态下PS II的实际量子产量(实际光合能力、实际光合效率)
不需暗适应,不需测定Fo’,适合野外调查。
Y(NPQ)=1-Y(II)-1/(NPQ+1+qL(Fm/Fo-1)):调节性能量耗散,PS II 处调节性能量耗散的量子产量。若Y(NPQ)较高,一方面表明植物接受的光强过剩,另一方面则说明植物仍可以通过调节(如将过剩光能耗散为热)来保护自身。Y(NPQ)是光保护的重要指标。
Y(NO)=1/(NPQ+1+qL(Fm/Fo-1)):非调节性能量耗散
PS II处非调节性能量耗散的量子产量。若Y(NO)较高,则表明光化学能量转换和保护性的调节机制(如热耗散)不足以将植物吸收的光能完全消耗掉。也就是说,入射光强超过了植物能接受的程度。这时,植物可能已经受到损伤,或者(尽管还未受到损伤)继续照光的话植物将要受到损伤。Y(NO)是光损伤的重要指标。
P:光合速率,即相对电子传递速率rETR
Pm: 最大光合速率,即最大相对电子传递速率rETRmax
α:初始斜率,反映了光能的利用效率
β:光抑制参数
Ik=Pm/α:半饱和光强,反映了样品对强光的耐受能力。
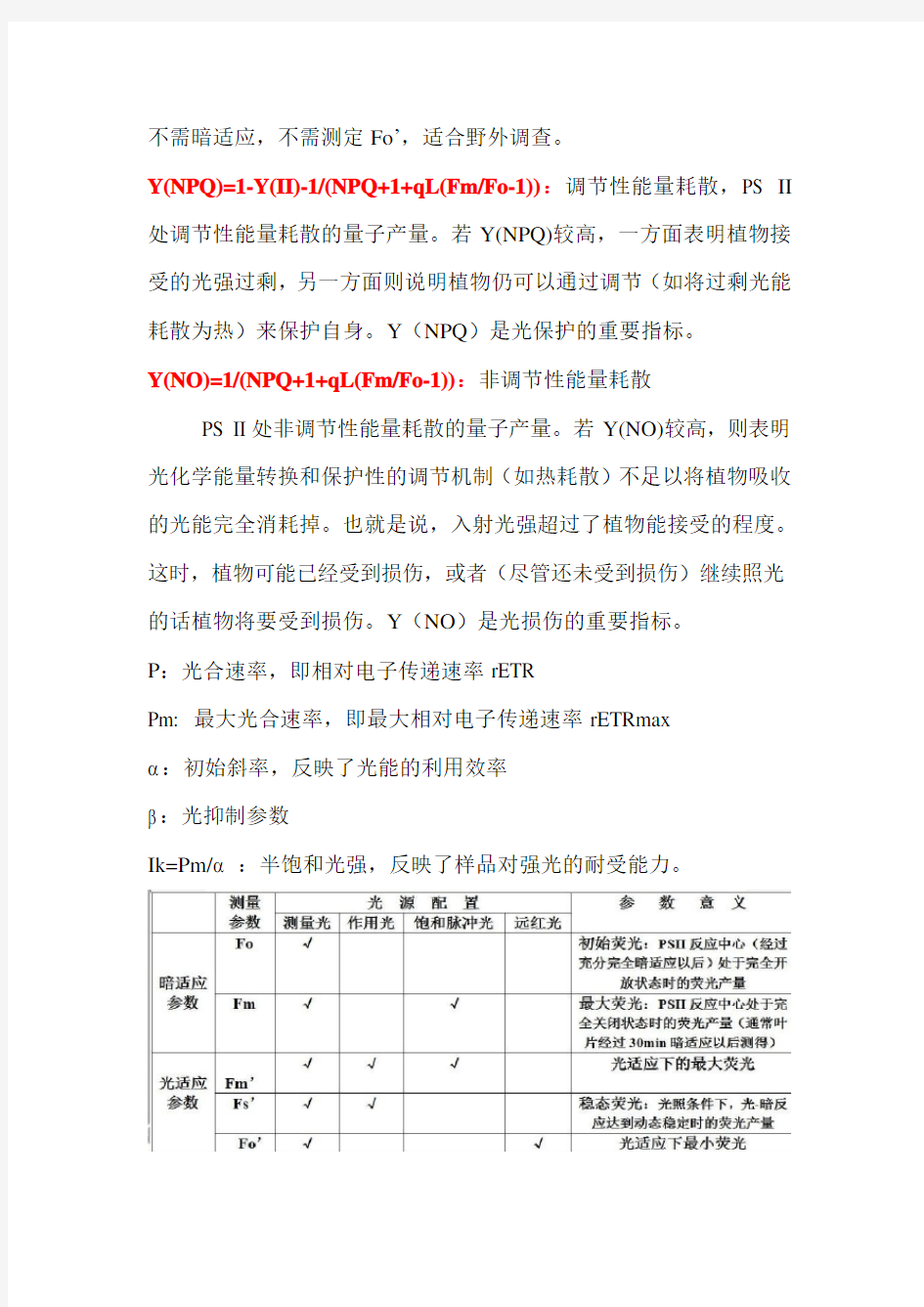
AL:作用光ML:检测光SP/P+Fsp:饱和脉冲光
注:光化学淬灭可以被一种短饱和脉冲光(0.2-1 s)暂时完全抑制,剩余的荧光淬灭就是非光化学淬灭。(叶绿素a荧光理论及其应用张西斌)
4.实验步骤
4.1 Dual-Pam100的操作步骤
4.1.1 参数调整
4.1.1.1 打开Dual-Pam100的界面,更改下面参数:
Mode:fluo+P700;
Means light:fiuo-int=10 P700-int=5
Act light: Act.red.right-int=17 Far red light=5 Width=40s Sat pulse: P+F+sp--int=10;
4.1.1.2点Light,进入界面,再点edit进行下面参数的编辑:
Intense 1,4,8,12,14,16,18,19,20
Time 2,2,2,2,2,2,2,2,2,之后的全部设置为0;
4.1.2进入测定界面开始测定
4.1.2.1回到slow kinetics界面
点击F0,F m(确定Y(II)值0.8-0.85之间)→点Bal(平衡光系统I,II)→点Pm(待回复灰色)→点start(过4s后)→点Al作用光(过3min 半)→点P+F+sp饱和光(此时一般会观察到红色曲线达到平衡)→过30s左右关掉Al(曲线会下降)→再过1min左右(曲线平稳)→点stop→在当前界面点击曲线保存按钮保存曲线。
4.1.2.2 回到light curve界面
点Bal→点start(出现对话框new F0,Fm and Pm-determindtion…点NO)→等曲线绘成后点report保存数据→数据保存后手动清空当前界面数据。
4.2荧光成像系统的操作
先打开荧光成像仪再打开电脑对应系统→将叶片按要求放在叶室;
4.2.1 进入setting界面
如下调整参数:
Meas.Light-int=1 Frequence=1;
Act.light-int=19 widths=0;
Image Correction=MAXI;
Image Transformation=Rotate 180°Battery=16.3V;
Gain=1 Damping=2
Sat.Pulse-int=10 No=1 Intervals=30;
Slow Induction-Delays=40 clocks=20 Durations=315; Absorptivity-Red Gain=30 red Intensity=3 NIR Intensity=23: Display=Color Go Speed-PS Limit=50 ;(其他的参数基本不变)
4.2.2 Imaging界面
点Reset→点Add(增加测量部位,可多个添加)→点Measure Abs(吸
光度)→点F0,Fm→点Report(将该界面右侧荧光参数值全部勾选)
→保存相应的数值;
4.2.3 回到Light curve界面或kinetics界面
点Start(等到20s)→点Al(过3min半)→点SAT-Pu/se(打饱和光)→在当前界面保存图像→在Report界面保存相关数据;
4.测量结果
5.数据分析
三坐标测量实验报告 姓名:XXX 学号:XXXXXXX 指导老师:XXX 专业:XXXX 2012年11月
一、快速综合检测 利用直接测量法测量给定的被测件 一、实验目的: 1、了解三坐标测量机系统组成和功能; 2、熟悉WTUTOR测量软件; 3、掌握三坐标测量机测量几何参数的基本技能; 4、学会测量数据的处理和零件设计方法。 二、实验要求: 1、根据被测件的特点以及所需测量的几何元素确定测量方案:包括所需的测头数及其标定、零件坐标系的建立等。 2、测量各几何要素,以文件方式输出测量结果。 3、根据测量数据,用AUTOCAD绘制零件图。 4、整理实验过程,编写实验技术报告。 三、实验方案设计: 1、分析被测件的特点和需要测量的几何特征,确定零件装夹方案:被测件的外观形状是长方体, 需要测量的几何特征是位于该长方体上的通孔、阶梯圆柱孔、小孔、阶梯平面和一槽,由于该零件质量较大,故无需装夹,只需平放于测量工作台面上即可。 2、确定工件坐标系:选择零件上通孔所在的直线为Y轴,相对较平整的平面作为XZ 平面,该平面与Y轴交点作为坐标原点,选择与Y轴平行的一个面的法线方向作为X轴。 3、根据被测几何元素,确定测头(1)A:0°,B:0°;(2)A:90°,B:90°; (3)A:90°,B:180°;(4)A:90°,B:-90°;(5)A:90°,B:0°; 4、根据被测参数确定被测元素、关系计算、形位测量等。选择测头在适当的工件坐标系下进行测量,并将测量数据存储到指定文件中。 四、实验步骤: 1、启动机器: 由于三坐标测量系统是一个多机器的复杂系统,所以要注意各机器的开启顺序。首
测量学实验报告 测量学实验报告 测量学(又名测地学)涉及人类生存空间,及通过把空间区域列入统计(列入卡片索引),测设定线和监控来对此进行测定。它的任务从地形和地球万有引力场确定到卫土地测量学(不动产土地),土地财产证明,土地空间新规定和城市发展。 一、实验目的;由于测量学是一门实践性很强的学科,而测量实验对培养学生思维和动手能力、掌握具体工作程序和内容起着相当重要的作用。实习目的与要求是熟练掌握常用测量仪器(水准仪、经纬仪)的使用,认识并了解现代测量仪器的用途与功能。在该实验中要注意使每个学生都能参加各项工作的练习,注意培养学生独立工作的能力,加强劳动观点、集体主义和爱护仪器的教育,使学生得到比较全面的锻炼和提高.
测量实习是测量学理论教学和实验教学之后的一门独立的实践性教学课程,目的在于: 1、进一步巩固和加深测量基本理论和技术方法的理解和掌握,并使之系统化、整体化; 2、通过实习的全过程,提高使用测绘仪器的操作能力、测量计算能力.掌握测量基本技术工作的原则和步骤; 3.在各个实践性环节培养应用测量基本理论综合分析问题和解决问题的能力,训练严谨的科学态度和工作作风。 二、实验内容 步骤简要:1)拟定施测路线。选一已知水准点作为高程起始点,记为a,选择有一定长度、一定高差的路线作为施测路线。然后开始施测第一站。以已知高程点a作后视,在其上立尺,在施测路线的前进方向上选择适当位置为第一个立
尺点(转点1)作为前视点,在转点1处放置尺垫,立尺(前视尺)。将水准仪安置在前后视距大致相等的位置(常用步测),读数a1,记录;再转动望远镜瞄前尺读数b1,并记录 2)计算高差。h1=后视读数一前视读数=a1-b1,将结果记入高差栏中。然后将仪器迁至第二站,第一站的前视尺不动变为第二站的后视尺,第一站的后视尺移到转点2上,变为第二站的前视尺,按与第一站相同的方法进行观测、记录、计算。按以上程序依选定的水准路线方向继续施测,直至回到起始水准点bm1为止,完成最后一个测站的观测记录。 3)成果检核。计算闭合水准路线的高差闭合差;若高差闭合差超限,应先进行计算校核,若非计算问题,则应进行返工重测。 实习过程中控制点的选取很重要,控制点应选在土质坚实、便于保存和安置水准仪的地方,相邻导线点间应通视良好,便于测角量距,边长约60米至100米左右。我觉得我们组测量时就有一个点的通视不是很好,有树叶遮挡,但是那也没办法,因为那个地方的环境所致,幸好我们可以解决.还
江西理工大学建筑工程测量 实验报告 专业建筑学 年级13级 班级**** 学号**** 姓名**** 2015年月日
目录 第一部分实验项目内容及要求第二部分实验报告 第三部分实验心得体会和建议
第一部分实验项目内容及要求
第二部分实验报告 实验报告一 日期2015.10.10 班组第六组学号*号姓名**** ㈠完成下列填空 1.安置仪器后,转动三个脚螺旋使圆水准器气泡居中,转动 目镜对光螺旋看清十字丝,通过镜筒上方的缺口和准星瞄准水准尺,转动水平微动螺旋精确照准水准尺,转动物镜对光螺旋进行对光消除视差,转动微倾螺旋使符合水准器气泡居中,最后读数。 2.消除视差的步骤是转动目镜对光螺旋使十字丝清晰,再转动 物镜对光螺旋使水准尺的分划像清晰。 ㈡实验记录和计算 1.记录水准尺上读数填入表2-1-1中。
表2-1-1 2.计算(基于黑红面读数的平均值) ⑴A点比C点低0.199 m。 ⑵B点比D点高0.388 m。 ⑶C点比E点高0.154 m。 ⑷假设C点的高程H C=158.936 m,求A点、B点、C点、D点、E点的高程,即:A A= 158.737 m,H B= 159.070 m,H C= 158.936m,H D= 158.682 m,H E= 158.782 m,水准仪的视线高程 H I= 160.458 m。 ㈢出图2-1-1中水准仪各部件的名称
图2-1-1 1)目镜对光螺旋;2)望远镜; 3)水准管;4)水平微动螺旋; 5)圆水准器;6)校正螺旋; 7)水平制动螺旋;8)准星; 9)脚螺旋;10)微倾螺旋; 11)水平微动螺旋;12)物镜对光螺旋; 13)缺口;14)三脚架。 实验报告二水准测量 日期2015.10.10 班组第六组学号*号姓名*** ㈠水准测量的外业记录及其高程计算 实验数据记入表2-2-1,进行高程的计算,并进行验算,以确保各项计算准确无误。 表2-2-1 水准测量的外业记录及其高程计算
实验二 基尔霍夫定律和叠加原理的验证 一、实验目的 1. 验证基尔霍夫定律的正确性,加深对基尔霍夫定律的理解。 2. 验证线性电路中叠加原理的正确性及其适用范围,加深对线性电路的叠加 性和齐次性的认识和理解。 3. 进一步掌握仪器仪表的使用方法。 二、实验原理 1.基尔霍夫定律 基尔霍夫定律是电路的基本定律。它包括基尔霍夫电流定律(KCL)和基尔霍 夫电压定律(KVL)。 (1)基尔霍夫电流定律(KCL) 在电路中,对任一结点,各支路电流的代数和恒等于零,即 ΣI =0。 (2)基尔霍夫电压定律(KVL) 在电路中,对任一回路,所有支路电压的代数和恒等于零,即 ΣU =0。 基尔霍夫定律表达式中的电流和电压都是代数量,运用时,必须预先任意假 定电流和电压的参考方向。当电流和电压的实际方向与参考方向相同时,取值为 正;相反时,取值为负。 基尔霍夫定律与各支路元件的性质无关,无论是线性的或非线性的电路,还 是含源的或无源的电路,它都是普遍适用的。 2.叠加原理 在线性电路中,有多个电源同时作用时,任一支路的电流或电压都是电路中 每个独立电源单独作用时在该支路中所产生的电流或电压的代数和。某独立源单 独作用时,其它独立源均需置零。(电压源用短路代替,电流源用开路代替。) 线性电路的齐次性(又称比例性),是指当激励信号(某独立源的值)增加 或减小 K 倍时,电路的响应(即在电路其它各电阻元件上所产生的电流和电压 值)也将增加或减小 K 倍。 三、实验设备与器件 1. 直流稳压电源 1 2. 直流数字电压表 1 3. 直流数字毫安表 1 4. 万用表 1 5. 实验电路板 1 四、实验内容 1.基尔霍夫定律实验 按图 2-1 接线。 台块 块 块块
测量学实验报告 2018-09-06 测量学实验报告 测量学(又名测地学)涉及人类生存空间,及通过把空间区域列入统计(列入卡片索引),测设定线和监控来对此进行测定。它的任务从地形和地球万有引力场确定到卫土地测量学(不动产土地),土地财产证明,土地空间新规定和城市发展。 一、实验目的;由于测量学是一门实践性很强的学科,而测量实验对培养学生思维和动手能力、掌握具体工作程序和内容起着相当重要的作用。实习目的与要求是熟练掌握常用测量仪器(水准仪、经纬仪)的使用,认识并了解现代测量仪器的用途与功能。在该实验中要注意使每个学生都能参加各项工作的练习,注意培养学生独立工作的能力,加强劳动观点、集体主义和爱护仪器的教育,使学生得到比较全面的锻炼和提高. 测量实习是测量学理论教学和实验教学之后的一门独立的实践性教学课程,目的在于: 1、进一步巩固和加深测量基本理论和技术方法的理解和掌握,并使之系统化、整体化; 2、通过实习的全过程,提高使用测绘仪器的操作能力、测量计算能力.掌握测量基本技术工作的原则和步骤; 3.在各个实践性环节培养应用测量基本理论综合分析问题和解决问题的能力,训练严谨的科学态度和工作作风。 二、实验内容 步骤简要:1)拟定施测路线。选一已知水准点作为高程起始点,记为a,选择有一定长度、一定高差的路线作为施测路线。然后开始施测第一站。以已知高程点a作后视,在其上立尺,在施测路线的前进方向上选择适当位置为第一个立尺点(转点1)作为前视点,在转点1处放置尺垫,立尺(前视尺)。将水准仪安置在前后视距大致相等的位置(常用步测),读数a1,记录;再转动望远镜瞄前尺读数b1,并记录 2)计算高差。h1=后视读数一前视读数=a1-b1,将结果记入高差栏中。然后将仪器迁至第二站,第一站的前视尺不动变为第二站的后视尺,第一站的后视尺移到转点2上,变为第二站的前视尺,按与第一站相同的方法进行观测、记录、计算。按以上程序依选定的水准路线方向继续施测,直至回到起始水准点bm1为止,完成最后一个测站的观测记录。
研究生实验报告项目名称:三坐标测量实验报告 姓名: 学号: 指导老师: 专业: 2013年11月15日
一、实验要求 1.根据实验室的三坐标测量仪和待测模型确定测量方案; 2. 与几何模型进行比较,分析误差; 3.对模型的几何要素尺寸和误差进行检测; 4.最终绘出模型的三维视图并出图; 二、实验设备 MISTRAL070705三坐标测量机,带有PC-DMIS软件的PC,电源,空压机,冷干机,空气过滤器。 三、实验方案 1.确定零件的具体结构: ①确定各几何元素所需测出的参数 测量零件的大致轮廓为方形,主要几何元素为平面、圆柱、圆柱孔和阶梯孔。因此可以选择测量件的三个垂直面建立空间直角坐标系。需要测量的主要位置误差元素为同轴度。 ②测头标定 测量元素包括垂直方向的圆柱及水平方向的圆柱,因此需要标定垂直方向与水平面四个方向。 ③根据零件确定测量基准 选定模型的1,2,3面为坐标系的三个基准面建立直角坐标系,并以1,2,3面作为测量基准, 2.空间坐标系的建立 面1的法线方向为X轴方向,面2的法线为Y轴方向,选定方形轮廓上平面一角为原点,并根据X轴、Y轴确定Z轴方向。如下图 图1 坐标系的确定
3.测量方案 调用自动测量程序,给定步长,根据平面的高度差,给定适合的补偿参数,然后测量面上选定的一定范围内的一系列坐标,通过与数据模型进行比较,判断相似度。 四、实验方法和步骤 1.开机 首先打开空气压缩机储气罐排水阀排水,然后依次开启空压机、冷干机和测量机气源,检查气压是否在0.4~0.5Mpa范围之内,如果不在此范围内则可通过气源调节阀调节。再依次接通交流稳压电源、UPS电源、控制系统电源和计算机电源,启动PC-DMIS测量程序,屏幕出现如图2初始页面 图2 PC-DMIS初始界面 图3 打开测量零件程序窗口
《误差理论与数据处理》实验指导书 姓名 学号 机械工程学院 2016年05月
实验一误差的基本性质与处理 一、实验内容 1.对某一轴径等精度测量8次,得到下表数据,求测量结果。 Matlab程序: l=[24.674,24.675,24.673,24.676,24.671,24.678,24.672,24.674];%已知测量值 x1=mean(l);%用mean函数求算数平均值 disp(['1.算术平均值为:',num2str(x1)]); v=l-x1;%求解残余误差 disp(['2.残余误差为:',num2str(v)]); a=sum(v);%求残差和 ah=abs(a);%用abs函数求解残差和绝对值 bh=ah-(8/2)*0.001;%校核算术平均值及其残余误差,残差和绝对值小于n/2*A,bh<0,故以上计算正确 if bh<0 disp('3.经校核算术平均值及计算正确'); else disp('算术平均值及误差计算有误'); end xt=sum(v(1:4))-sum(v(5:8));%判断系统误差(算得差值较小,故不存在系统误差) if xt<0.1 disp(['4.用残余误差法校核,差值为:',num2str(x1),'较小,故不存在系统误差']); else disp('存在系统误差'); end bz=sqrt((sum(v.^2)/7));%单次测量的标准差 disp(['5.单次测量的标准差',num2str(bz)]);
p=sort(l);%用格罗布斯准则判断粗大误差,先将测量值按大小顺序重新排列 g0=2.03;%查表g(8,0.05)的值 g1=(x1-p(1))/bz; g8=(p(8)-x1)/bz;%将g1与g8与g0值比较,g1和g8都小于g0,故判断暂不存在粗大误差if g1 基本测量(实验报告格式)、实验项目名称实验一:长度和圆柱体体积的测量实验二:密度的测量 二、实验目的实 验一目的: 1、掌握游标的原理,学会正确使用游标卡尺。 2、了解螺旋测微器的结构和原理,学会正确使用螺旋测微器。 3 、掌握不确定度和有效数字的概念,正确表达测量结果。 实验二目的: 1、掌握物理天平的正确使用方法。 2、用流体静力称量法测定形状不规则的固体的密度。 3、掌握游标卡尺,螺旋测位器,物理天平的测量原理及正确使用方法 4、掌握不确定度和有效数字的概念,正确表达测量结果 5、学会直接测量量和间接测量量的不确定度的计算,正 确表达测量结果 三、实验原理 实验一原理: 1、游标卡尺的使用原理 游标副尺上有n个分格,它和主尺上的(n-1)格分格的总长度相等,一般主尺上每一分格的长度为1mm,设游标上每一个分格的长度为x,则有nx=n-1,主尺上每一分格与游标上每一分格的差值为1-x= (mm)是游标卡尺的最小读数,即游 标卡尺的分度值。若游标上有20个分格,则该游标卡尺的 分度值为=0.05mm,这种游标卡尺称为20分游标卡尺;若游标上有50个分格,其分度值为=0.02mm,称这种游标卡尺为50分游标卡尺。 2、螺旋测微器的读数原理: 螺旋测微器是依据螺旋放大的原理制成的,即螺杆在螺母中旋转一周,螺杆便沿着旋转轴线方向前进或后退一个螺距的距离。因此,沿轴线方向移动的微小距离,就能用圆周上的读数表示出来。 3、当待测物体是一直径为d、高度为h的圆柱体时, V =兀* * h 物体的体积为:一4 d2只要用游标卡尺测出高度 h,用螺旋测微器测出直径d,代 入上式即可 专业及班级:姓名:学号: 实验二:三坐标测量机检测 一、实验目的:通过观察三坐标测量机的检测过程,分析检测的基本原理,掌握三坐标测量机的日常操作过程。 二、实验设备:西安爱德华MQ686三坐标测量仪及其辅助设备。 设备简介:机械整体结构采用刚性结构好、质量轻的全封闭框架移动桥式结构。其结构简单、紧凑、承载能力大、运动性能好。 固定优质花岗岩工作台:具有承载能力强、装卸空间宽阔、便捷的功能。 Y向导轨:采用燕尾式,定位精度高,稳定性能好。 三轴采用优质花岗岩,热膨胀系数小,三轴具有相同的温度特性,因而具有良好的温度稳定性、抗实效变形能力,刚性好、动态几何误差变形小。 三轴均采用自洁式预载荷高精度空气轴承组成的静压气浮式导轨,轴承跨距大,抗角摆能力强,阻力小、无磨损、运动更平稳。 横梁采用精密斜梁设计技术(已获专利),重量轻、重心低、刚性强,动态误差小,确保了机器的稳定。 Z轴采用气缸平衡装置,极大的提高了Z轴的定位精度及稳定性。控制系统采用德国知名的SB专用三坐标数控系统,具有国际先进的上下位机式的双计算机系统,从而极大地提高系统的可靠性和抗干扰能力,降低了维护成本。 三、实验原理: 三坐标测量机:由三个运动导轨,按笛卡尔坐标系组成的具有测量功能的测量仪器,称为三坐标测量机,并且由计算机来分析处理数据(也可由计算机控制,实现全自动测量),是一种复杂程度很高的计量设备。三坐标测量机是一种高效、新颖的精密测量仪器。它广泛应用于机械制造、仪器制造、电子工业、航空工业 等各领域。 分类: 按其精度分为两大类: 计量型:(UMM)1.5 μm+2L/1000 一般放在有恒温条件的计量室内, 用于精密测量分辨率为0.5μm,1或2μm,也有达0.2μm的; 生产型:(CMM)一般放在生产车间,用于生产过程的检测,并可进行末道工序的精加工,分辨率为5μm或10μm,小型生产测量机也有1μm或2μm的。 按结构分为:悬臂式、龙门式、桥式、铣床式 按控制方式分为:手动式、自控式 测量学C实验 指导书 班级: 学号: 组别: 姓名: 实验须知 实验是配合课堂教学的一个重要教学环节,同时也是培养学生掌握实验的基本技能和进行基本训练的一个主要手段,为了保证实验的顺利进行,必须注意下列事项: 1、实验之前,希望同学们要预习实验指导书,了解本次实验的目的,原理和要求: 2、严格按操作步骤认真操作,实验报告要客观、详细记录实验步骤,实验成果等。 3、爱护实验仪器,非本次实验用的仪器或虽是本次实验所用的仪器,但在老师没有讲解之前都不得随便乱动,以免损坏仪器; 4、实验中不慎损坏仪器或丢失仪器中的附件,均应主动地告诉老师,按照有关规定处理; 目录 实验一水准仪的使用 (1) 实验二经纬仪的使用 (5) 实验三碎部测量 (12) 实验一水准仪的使用 (1)水准仪的使用 一、目的 1、了解DS3级水准仪的构造及各部分的名称和作用 2、掌握水准仪使用的基本操作 3、练习水准尺读数 二、要求 实验学时安排为2学时,每人安置2~3次水准仪,读尺4~5次。 三、仪器及工具 每组:水准仪一台、水准尺一把、记录板一块。 四、预习内容 水准测量的仪器及工具,水准仪的使用 五、实验步骤 1、安置水准仪:测量仪器所安置的地点称为测站。打开三脚架,使其高度适中,架头大致水平,牢固地架设在地面上。然后打开仪器箱(记清仪器各部件位置,以便装箱时按原来位置放置),双手握基座取出仪器,放在三脚架上,用连接螺旋将水准仪固连在三脚架上。用手推一下仪器,检查仪器是否真正连接牢固。 2、熟悉仪器:认识水准仪构造及各部分的名称、作用。 3、粗略整平: (1)置圆气泡于两脚螺旋之间(或于一脚螺旋上方),转动这两个脚螺旋使圆气泡在这两脚螺旋方向居中(气泡移动方向与左手大姆指旋转方向一致)。 (2)转动第三个脚螺旋使圆气泡居中,反复练习几次。 4、瞄准对光: (1)将望远镜对向明亮的背景(白墙或白纸),转动目镜对光螺旋使十字丝看得非常清晰。 (2)松开制动螺旋,用镜筒上的准星瞄准水准尺(立水准尺在离水准仪约30米处),拧紧制动螺旋。 (3)转动物镜对光螺旋,使水准尺的像十分清晰,然后眼睛在目镜上下作微小移动,观察水准尺与十字丝面是否有相对移动。若有,则存在视差,为此,可反复调节对光螺旋,直到视差消除为止。 (4)旋转微动螺旋,使水准尺的象靠近十字丝的纵丝。 机器视觉实验报告 目录 一实验名称 (2) 二试验设备 (2) 三实验目的 (2) 四实验内容及工作原理 (2) (一)kinect for windows (2) (二)手持式自定位三维激光扫描仪 (3) (三)柔性三坐标测量仪 (9) (四)双面结构光 (10) 总结与展望 (14) 参考文献 (16) 《机器视觉》实验报告 一、实验名称 对kinect for windows、三维激光扫描仪、柔性三坐标测量仪和双面结构光等设备结构功能的认识。 二、实验设备 kinect for windows、三维激光扫描仪、柔性三坐标测量仪、双面结构光。 三、实验目的 让同学们对机器视觉平时所使用的仪器设备以及机器视觉在实际运用中的具体实现过程有一定的了解。熟悉各种设备的结构功能和操作方法,以便于进行二次开发。其次,深化同学们对机器视觉系统的认识,拓宽同学们的知识面,以便于同学们后续的学习。 四、实验内容及工作原理 (一)kinect for windows 1.Kinect简介 Kinectfor Xbox 360,简称Kinect,是由微软开发,应用于Xbox 360 主机的周边设备。它让玩家不需要手持或踩踏控制器,而是使用语音指令或手势来操作Xbox360 的系统界面。它也能捕捉玩家全身上下的动作,用身体来进行游戏,带给玩家“免控制器的游戏与娱乐体验”。2012年2月1日,微软正式发布面向Windows系统的Kinect版本“Kinect for Windows”。 2.硬件组成 Kinect有三个镜头[1],如图1-1所示。中间的镜头是RGB 彩色摄影机,用来采集彩色图像。左右两边镜头则分别为红外线发射器和红外线CMOS 摄影机所构成的3D结构光深度感应器,用来采集深度数据(场景中物体到摄像头的距离)。彩色摄像头最大支持1280*960分辨率成像,红外摄像头最大支持640*480成像。Kinect还搭配了追焦技术,底座马达会随着对焦物体移动跟着转动。Kinect也内建阵列式麦克风,由四个麦克风同时收音,比对后消除杂音,并通过其采集声音进行语音识别和声源定位[2][3]。 测量刚体的转动惯量实验报告及数据处理 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】 实验讲义补充: 1.刚体概念:刚体是指在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不 变的物体。 2.转动惯量概念:转动惯量是刚体转动中惯性大小的量度。它取决于刚体的总质量,质量分 布、形状大小和转轴位置 3.转动定律:合外力矩=转动惯量×角加速度 4.转动惯量叠加: 空盘:(1)阻力矩(2)阻力矩+砝码外力→J1 空盘+被测物体:(1)阻力矩(2)阻力矩+砝码外力→J2 被测物体:J3=J2-J1 5.转动惯量理论公式:圆盘&圆环J=0.5mr2,J=0.5m(r12+r12) 6.转动惯量实验仪器:水准仪;线水平;线与孔不产生摩擦;塔轮选小的半径;至少3个塔轮 半径,3组砝码质量 7.计数器:遮光板半圈π;单电门,多脉冲;空盘15圈,20个值;加上被测物体,8个值; 8.泡沫垫板 9.重力加速度:s^2 10.质量:1次读数,包括砝码,圆盘,圆环,以及两圆柱体; 11.游标卡尺:6次读数,包括圆盘半径,圆环内外半径,塔轮半径,转盘上孔的内外半径(求 平均值) 12.实验目的:测量值与理论值对比 实验计算补充说明: 1.有效数字:质量,故有效数字为3位 2.游标卡尺:,读数最后一位肯定为偶数; 3.误差&不确定度: (1)理论公式计算的误差: 圆盘:J=0.5mR2(注意:直接测量的是直径) 质量m=±;(保留4位有效数字) um=*100%=% 半径R=± 若测6次,x1,x2,x3,x4,x5,x6,i=6,计算x平均值 , 取n=6时的 ,我们处理为0 C=,仪器允差,δB= 总误差:,ux= m 姓名: 院校学号: 学习中心: _______________ 层次:专升本 专业:土木工程 实验一:混凝土实验 一、实验目的:1、熟悉混凝土的技术性质和成型养护方法;2、掌握砼拌合物工作性的测定和评定方法;3、通过检验砼的立方体抗压强度,掌握有关强度的评定方法。 二、配合比信息: 1 .基本设计指标 (1)设计强度等级C30 (2)设计砼坍落度30-50mm 2.原材料 (1)水泥:种类复合硅酸盐水泥强度等级C32.5 (2)砂子:种类河砂细度模数 2.6 (3)石子:种类碎石粒级5-31.5mm (4)水:洁净的淡水或蒸馏水 3.配合比:(kg/m3) 三、实验内容: 第1部分:混凝土拌合物工作性的测定和评价 1、实验仪器、设备:电子秤、量筒、坍落度筒、拌铲、小铲、捣棒(直径16mm、长600mm, 端部呈半球形的捣棒)、拌合板、金属底板等。 2、实验数据及结果 第2部分:混凝土力学性能检验 1、实验仪器、设备:标准试模:150mm X 150mm X 150 mm 、振动台、压力试验机(测量精度为土1%,时间破坏荷载应大于压力机全量程的20%;且小于压力机全量程的80%。、压力试验机控制面板、标准养护室(温度20C±2C,相对湿度不低于95%。 2、实验数据及结果 四、实验结果分析与判定: (1、混凝土拌合物工作性是否满足设计要求,是如何判定的? 答:满足设计要求。实验要求混凝土拌合物的塌落度30—50mm,而此次实验结果中塌落度 为40mm, 符合要求;捣棒在已塌落的拌合物锥体侧面轻轻敲打,锥体逐渐下沉表示粘聚 性良好;塌落度筒提起后仅有少量稀浆从底部析出表示保水性良好。 篇一:大学物理实验1误差分析 云南大学软件学院实验报告 课程:大学物理实验学期: - 学年第一学期任课教师: 专业: 学号: 姓名: 成绩: 实验1 误差分析 一、实验目的 1. 测量数据的误差分析及其处理。 二、实验内容 1.推导出满足测量要求的表达式,即 0? (?)的表达式; 0= (( * )/ (2*θ)) 2.选择初速度A,从[10,80]的角度范围内选定十个不同的发射角,测量对应的射程, 记入下表中: 3.根据上表计算出字母A 对应的发射初速,注意数据结果的误差表示。 将上表数据保存为A. ,利用以下程序计算A对应的发射初速度,结果为100.1 a =9.8 _ =0 =[] _ = ("A. "," ") _ = _ . ad ()[:-1] = _ [:]. ('\ ') _ = _ . ad ()[:-1] = _ [:]. ('\ ') a (0,10): .a d( a . ( a ( [ ])* / a . (2.0* a ( [ ])* a . /180.0))) _ += [ ] 0= _ /10.0 0 4.选择速度B、C、D、重复上述实验。 B C 6.实验小结 (1) 对实验结果进行误差分析。 将B表中的数据保存为B. ,利用以下程序对B组数据进行误差分析,结果为 -2.84217094304 -13 a =9.8 _ =0 1=0 =[] _ = ("B. "," ") _ = _ . ad ()[:-1] = _ [:]. ('\ ') _ = _ . ad ()[:-1] = _ [:]. ('\ ') a (0,10): .a d( a . ( a ( [ ])* / a . (2.0* a ( [ ])* a . /180.0))) _ += [ ] 0= _ /10.0 a (0,10): 1+= [ ]- 0 1/10.0 1 (2) 举例说明“精密度”、“正确度”“精确度”的概念。 1. 精密度 计量精密度指相同条件测量进行反复测量测值间致(符合)程度测量误差角度说精密度所 反映测值随机误差精密度高定确度(见)高说测值随机误差定其系统误差亦。 2. 正确度 计量正确度系指测量测值与其真值接近程度测量误差角度说正确度所反映测值系统误差 正确度高定精密度高说测值系统误差定其随机误差亦。 3. 精确度 计量精确度亦称准确度指测量测值间致程度及与其真值接近程度即精密度确度综合概念 测量误差角度说精确度(准确度)测值随机误差系统误差综合反映。 比如说系统误差就是秤有问题,称一斤的东西少2两。这个一直恒定的存在,谁来都是 这样的。这就是系统的误差。随机的误差就是在使用秤的方法。 篇二:数据处理及误差分析 物理实验课的基本程序 测量学实验报告 Record the situati on and less ons lear ned, find out the exist ing p roblems and form future coun termeasures. 名: 位: 间: 编号:FS-DY-20114 测量学实验报告 i说明:本报告资料适用于记录基本情况、过程中取得的经验教训、发现存在的问题 I I i以及形成今后的应对措施。文档可直接下载或修改,使用时请详细阅读内容。 I ! ____________________________________________________________________________ 测量学实验报告 测量学(又名测地学)涉及人类生存空间,及通过把空 间区域列入统计(列入卡片索引),测设定线和监控来对此进行测定。它的任务从地形和地球万有引力场确定到卫土地测量学(不动产土地),土地财产证明,土地空间新规定和城市发展。 、实验目的;由于测量学是一门实践性很强的学科,而 测量实验对培养学生思维和动手能力、掌握具体工作程序和内容起着相当重要的作用。实习目的与要求是熟练掌握常用测量仪器(水准仪、经纬仪)的使用,认识并了解现代测量仪器的用途与功能。在该实验中要注意使每个学生都能参加各项工作的练习,注意培养学生独立工作的能力,加强劳动观点、集体主义和爱护仪器的教育,使学生得到比较全面的锻炼和提高. 测量实习是测量学理论教学和实验教学之后的一门独 立的实践性教学课程,目的在于: 1、进一步巩固和加深测量基本理论和技术方法的理解 和掌握,并使之系统化、整体化; 2、通过实习的全过程,提高使用测绘仪器的操作能力、 测量计算能力.掌握测量基本技术工作的原则和步骤; 3.在各个实践性环节培养应用测量基本理论综合分析问 题和解决问题的能力,训练严谨的科学态度和工作作风。 、实验内容 步骤简要:1)拟定施测路线。选一已知水准点作为高程 起始点,记为a,选择有一定长度、一定高差的路线作为施 测路线。然后开始施测第一站。以已知高程点a作后视,在其上立尺,在施测路线的前进方向上选择适当位置为第一个立尺点(转点1)作为前视点,在转点1处放置尺垫,立尺 (前视尺)。将水准仪安置在前后视距大致相等的位置(常用 步测),读数a1,记录;再转动望远镜瞄前尺读数b1,并记2)计算高差。h1=后视读数一前视读数=a1-b1,将结果记 建筑工程测量实验报告 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT 江西理工大学 建筑工程测量 实验报告 专业建筑学 年级13级 班级 **** 学号 **** 姓名 **** 2015年月日 目录 第一部分实验项目内容及要求 第二部分实验报告 第三部分实验心得体会和建议 实验报告一 日期班组第六组学号 *号姓名**** ㈠完成下列填空 1.安置仪器后,转动三个脚螺旋使圆水准器气泡居中,转动 目镜对光螺旋看清十字丝,通过镜筒上方的缺口和准星瞄准水准尺,转动水平微动螺旋精确照准水准尺,转动物镜对光螺旋进行对光消除视差,转动微倾螺旋使符合水准器气泡居中,最后读数。 2.消除视差的步骤是转动目镜对光螺旋使十字丝清晰,再转动 物镜对光螺旋使水准尺的分划像清晰。 ㈡实验记录和计算 1.记录水准尺上读数填入表2-1-1中。 表2-1-1 2.计算(基于黑红面读数的平均值) ⑴ A点比C点低 m。 ⑵ B点比D点高 m。 ⑶ C点比E点高 m。 ⑷假设C点的高程H C= m,求A点、B点、C点、D点、E点的高程,即: A A= m,H B= m,H C= ,H D= m,H E= m,水准仪的视线高程 H I= m。 ㈢出图2-1-1中水准仪各部件的名称 图2-1-1 1)目镜对光螺旋; 2)望远镜; 3)水准管; 4)水平微动螺旋; 5)圆水准器; 6)校正螺旋; 7)水平制动螺旋; 8)准星; 9)脚螺旋; 10)微倾螺旋; 11)水平微动螺旋; 12)物镜对光螺旋; 13)缺口; 14)三脚架。 实验报告二水准测量 日期班组第六组学号 *号姓名 *** ㈠水准测量的外业记录及其高程计算 实验数据记入表2-2-1,进行高程的计算,并进行验算,以确保各项计算准确无误。 题目:先进制造技术实验 学院:工学部_____ 学号:__ 姓名:_____ 班级: 13机工__ 指导教师:李庆梅_____ 日期: 2016年5月28日 实验一 三坐标机测量 一、实验目的 通过三坐标测量机的演示性实验,了解三坐标测量机在先进制造工艺技术中所起的作用。 二、实验要求 (1)了解三坐标测量机的组成; (2)了解三坐标测量机的测量原理; (3)了解反求工程的概念。 三、实验原理及设备 图1为Discovery Ⅱ D-8 型桥式三坐标测量机外形图,三坐标测量机的三组导轨相互垂直,形成了 X,Y,Z 三个运动轴,各方向的行程分别由高分辨率精密光栅尺测量,从而组成了机器的空间直角坐标系统,原点位于测量机左前上方。测量工件时,探头(测头)相对坐标系运动,用它来探测处于坐标系内的任 何待测工件表面,即可确定该测点的空间坐标值, 经计算机采集 得到测点数据,按程序规定的要求探测若干点后, 计算机即可对采样数据进行处理,从中计算出被测几何要素的尺寸、形状误差和 在坐标系中的位置, 在对若干要素探测后, 计算机可根据不同的测量要求计算出这些几何要素间的位置尺寸和位置误差。 Discovery Ⅱ D-8 型三坐标测量机配有MeasureMax+(Version 6.4)测量软件,该软件功能强大,内容丰富,整个测量操作过程可由计算机控制自动完成,也可以由操纵杆(见图2.)配合计算机完成部分手动操作。 图2 操作杆四、实验步骤 图3 测量操作流程 实验二快速原型制造 一、实验目的 目前快速原形制造技术已成为各国制造科学研究的前沿学科和研究焦点。通过快速成型机演示性实验,了解快速原型制造在先进制造工艺技术中所起的作用。 二、实验要求 (1)了解快速成型机的组成; (2)了解快速成型机的实体成型原理; (3)通过参观实验室现有快速成型零件,了解快速原型制造的应用。 三、实验原理及设备 快速成形制造工艺采用离散/堆积成型原理成型,首先利用高性能的CAD软件设计出零件的三维曲面或实体模型;再根据工艺要求,按照一定的厚度在Z 向(或其它方向)对生成的CAD模型进行切面分层,将三维电子模型变成二维平面信息(离散过程),然后对层面信息进行工艺处理,选择加工参数,系统自动生成刀具移动轨迹和数控加工代码;并对加工过程进行仿真,确认数控代码的正确性;再利用数控装置精确控制激光束或其它工具的运动,在当前工作层(三维)上采用轮廓扫描,加工出适当的截面形状;将各分层加工的每个薄层自动粘接,最后直至整个零件加工完毕。可以看出,快速成形技术是个由三维转换成二维(软件离散化),再由二维到三维(材料堆积)的工作过程。 快速原形制造技术的主要工艺方法有光敏液相固化法LSA( Stero Lithography Apparatus),选区片层粘接法LOM(Laminated Object Manufacturing),选区激光烧结法SLS(Selective Laser Sintering)和熔丝沉积成型FDM(Fused Deposition Modeling)。本实验采用熔丝沉积成型FDM工艺方法进行快速原形制造,该方法使用ABA丝为原料,利用电加热方式将ABA丝熔化,由喷嘴喷到指定的位置固化。一层层地加工出零件,该方法设备简单,零件精度较高,污染小。 图1为结构图,它由喷头、喷咀、导杆、Z轴丝杆、Z工作台、成型材料盒、支撑材料盒、废料桶、显示面板(Prodigy Plus型机的控制面板在材料盒 ( 实习报告 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 社会实践实习报告:建筑工程测 量实训报告 Social practice practice report: construction engineering survey training report 社会实践实习报告:建筑工程测量实训报 告 社会实践实习报告:建筑工程测量实训报告 进入大学的第一次测量实训终于在大家的期盼中来了,因为大家都想抓紧实训的时间好好休息一下,可是,现实是如此的残酷! 开始老师让我们先从理论下手,介绍了水准仪和经纬仪的构成以及它的使用方法,我们都很认真的记载着老师所讲的重点,在学习中,我知道了测量人员是工程建设的开路先锋,是确保工程质量的“千里眼”,我为能成为测量人而感到自豪!老师还说了,让我们好好保护仪器!我们知道了:人在仪器在,人亡仪器也不能亡!可是让人疑惑的是老师总让我们做好“军训”的打算,有那么辛苦吗? 很快我就见到了传说中的水准仪,它长得真的很不咋的,可是在老师的介绍下,我知道了它是一个很有内涵的仪器!千万不能小 看它!但是还好的就是它的螺栓比较少,所以我还能接受!可是调节经纬仪的过程就比较复杂了,螺旋比较多,测量时仪器不停的转动,脑袋就晕了,对准后就不知螺旋在哪了,只能瞎摸。但有句话叫“熟能生巧”,这句话一点不假,在实训中,这个成语就得到验证,尽管开始是有点生疏,但经过一圈测量,想不熟也挺难的,而且速度也不断的提高。 下面就来谈谈具体的!我是第一批在校内测量经纬仪的!它的螺栓比水准仪多多了!弄得我头晕眼花的!没办法!我必须要坚持下去!第一个下午,我们全组组员就遇到大麻烦了!因为经纬仪的调整要三个地方全部调好,可是我们老是没办法让它们全都统一,老是这儿调好了,那儿的气泡又跑了!我们组是第八组,组员有6个,而别的组是5个人,所以我们要比别的组要更抓紧时间,可是当第九组已经测六个点时,我们组还压根没挪窝,可是越急越不知道该怎么办!后来在别的组来了一个同学,我们连忙请教他! 1.先要让三脚架的中心大约和地面的点进行对齐。 2.调节气泡让它处于圆水准器的中间部分。 创作编号: GB8878185555334563BT9125XW 创作者:凤呜大王* 叠加原理实验报告范文 一、实验目的 验证线性电路叠加原理的正确性,加深对线性电路的叠加性和齐次性的认识和理解。 二、原理说明 叠加原理指出:在有多个独立源共同作用下的线性电路中,通过每一个元件的电流或其两端的电压,可以看成是由每一个独立源单独作用时在该元件上所产生的电流或电压的代数和。 线性电路的齐次性是指当激励信号(某独立源的值)增加或减小K倍时,电路的响应(即在电路中各电阻元件上所建立的电流和电压值)也将增加或减小K倍。 三、实验设备 高性能电工技术实验装置DGJ-01:直流稳压电压、直流数字电压表、直流数字电流表、叠加原理实验电路板DGJ-03。 四、实验步骤 1.用实验装置上的DGJ-03线路,按照实验指导书上的图3-1,将两路稳压电源的输出分别调节为12V和6V,接入图中的U1和U2处。 2.通过调节开关K1和K2,分别将电源同时作用和单独作用在电路中,完成如下表格。 表3-1 3.将U2的数值调到12V,重复以上测量,并记录在表3-1的最后一行中。 4.将R3(330 )换成二极管IN4007,继续测量并填入表3-2中。 表3-2 五、实验数据处理和分析 对图3-1的线性电路进行理论分析,利用回路电流法或节点电压法列出电路方程,借助计算机进行方程求解,或直接用EWB软件对电路分析计算,得出的电压、电流的数据与测量值基本相符。验证了测量数据的准确性。电压表和电流表的测量有一定的误差,都在可允许的误差范围内。 验证叠加定理:以I1为例,U1单独作用时,I1a=8.693mA,,U2单独作用时, I1b=-1.198mA,I1a+I1b=7.495mA,U1和U2共同作用时,测量值为7.556mA,因此叠加性得以验证。2U2单独作用时,测量值为-2.395mA,而2*I1b=-2.396mA,因此齐次性得以验证。其他的支路电流和电压也可类似验证叠加定理的准确性。 对于含有二极管的非线性电路,表2中的数据不符合叠加性和齐次性。 测量学实验报告范文 测量学实验报告范文 测量学(又名测地学)涉及人类生存空间,及通过把空间区域列 入统计(列入卡片索引),测设定线和监控来对此实行测定。它的任 务从地形和地球万有引力场确定到卫土地测量学(不动产土地),土 地财产证明,土地空间新规定和城市发展。 一、实验目的;因为测量学是一门实践性很强的学科,而测量实验 对培养学生思维和动手水平、掌握具体工作程序和内容起着相当重要 的作用。实习目的与要求是熟练掌握常用测量仪器(水准仪、经纬仪)的使用,理解并了解现代测量仪器的用途与功能。在该实验中要注意 使每个学生都能参加各项工作的练习,注意培养学生独立工作的水平,增强劳动观点、集体主义和爱护仪器的教育,使学生得到比较全面的 锻炼和提升. 测量实习是测量学理论教学和实验教学之后的一门独立的实践性 教学课程,目的在于: 1、进一步巩固和加深测量基本理论和技术方法的理解和掌握,并 使之系统化、整体化; 2、通过实习的全过程,提升使用测绘仪器的操作水平、测量计算 水平.掌握测量基本技术工作的原则和步骤; 3.在各个实践性环节培养应用测量基本理论综合分析问题和解决 问题的水平,训练严谨的科学态度和工作作风。 二、实验内容 步骤简要:1)拟定施测路线。选一已知水准点作为高程起始点, 记为a,选择有一定长度、一定高差的路线作为施测路线。然后开始施测第一站。以已知高程点a作后视,在其上立尺,在施测路线的前进 方向上选择适当位置为第一个立尺点(转点1)作为前视点,在转点1 处放置尺垫,立尺(前视尺)。将水准仪安置在前后视距大致相等的 位置(常用步测),读数a1,记录;再转动望远镜瞄前尺读数b1,并 记录 2)计算高差。h1=后视读数一前视读数=a1-b1,将结果记入高差 栏中。然后将仪器迁至第二站,第一站的前视尺不动变为第二站的后 视尺,第一站的后视尺移到转点2上,变为第二站的前视尺,按与第 一站相同的方法实行观测、记录、计算。按以上程序依选定的水准路 线方向继续施测,直至回到起始水准点bm1为止,完成最后一个测站 的观测记录。 3)成果检核。计算闭合水准路线的高差闭合差;若高差闭合差超限,应先实行计算校核,若非计算问题,则应实行返工重测。 实习过程中控制点的选择很重要,控制点应选在土质坚实、便于 保存和安置水准仪的地方,相邻导线点间应通视良好,便于测角量距,边长约60米至100米左右。我觉得我们组测量时就有一个点的通视不 是很好,有树叶遮挡,但是那也没办法,因为那个地方的环境所致, 幸好我们能够解决.还有水准仪和经纬仪的调平和对中都需要做好,这 直接影响你的测量结果。测量学教学实习是测量学的重要组成部分,其 目的是巩固扩大和加深我们课堂所学的理论知识,获得测量实际工作的 初步经验和基本技能,着重培养我们的独立工作水平,进一步熟练掌握 测量仪器的操作技能,提升计算和绘图水平,并对测绘小区域大比例尺 地形图的全过程有一个全面和系统的理解,为今后解决实际工作中的相 关测量问题打下坚实的基础。 观测时要认真,有时目标稍微偏一点,读盘上读数就会有变化, 误差就会增大,或许超出容许值范围,结果就要重测,浪费很多时间,所以观测时也很重要。读数时由一个人来读数,这样可减少误差 计算是一个谨慎、复杂的过程。为了能够尽量赶超进度,我们组 的数据绝大部分则有我和李丽实行处理。但是,计算完之后,我们俩基本测量实验报告
(完整word版)三坐标测量机检测实验报告
测量学实验报告
机器视觉实验报告
测量刚体的转动惯量实验报告及数据处理
建筑工程混凝土实验实验报告
大学物理实验报告数据处理及误差分析
测量学实验报告范本
建筑工程测量实验报告
先进制造技术实验报告
社会实践实习报告:建筑工程测量实训报告
叠加原理 实验报告范文(含数据处理)
测量学实验报告范文
相关主题
文本预览