目录
一、题目及要求 (1)
二、功能分解 (2)
三、机构选用 (4)
四、机构运动循环图 (5)
五、根据电机参数拟定机械传动方案 (6)
六、机械传动的评价 (10)
七、最终选择方案及机构运动简图 (11)
八、心得体会…………………………………………………………
九、参考文献…………………………………………………………
一、题目及要求
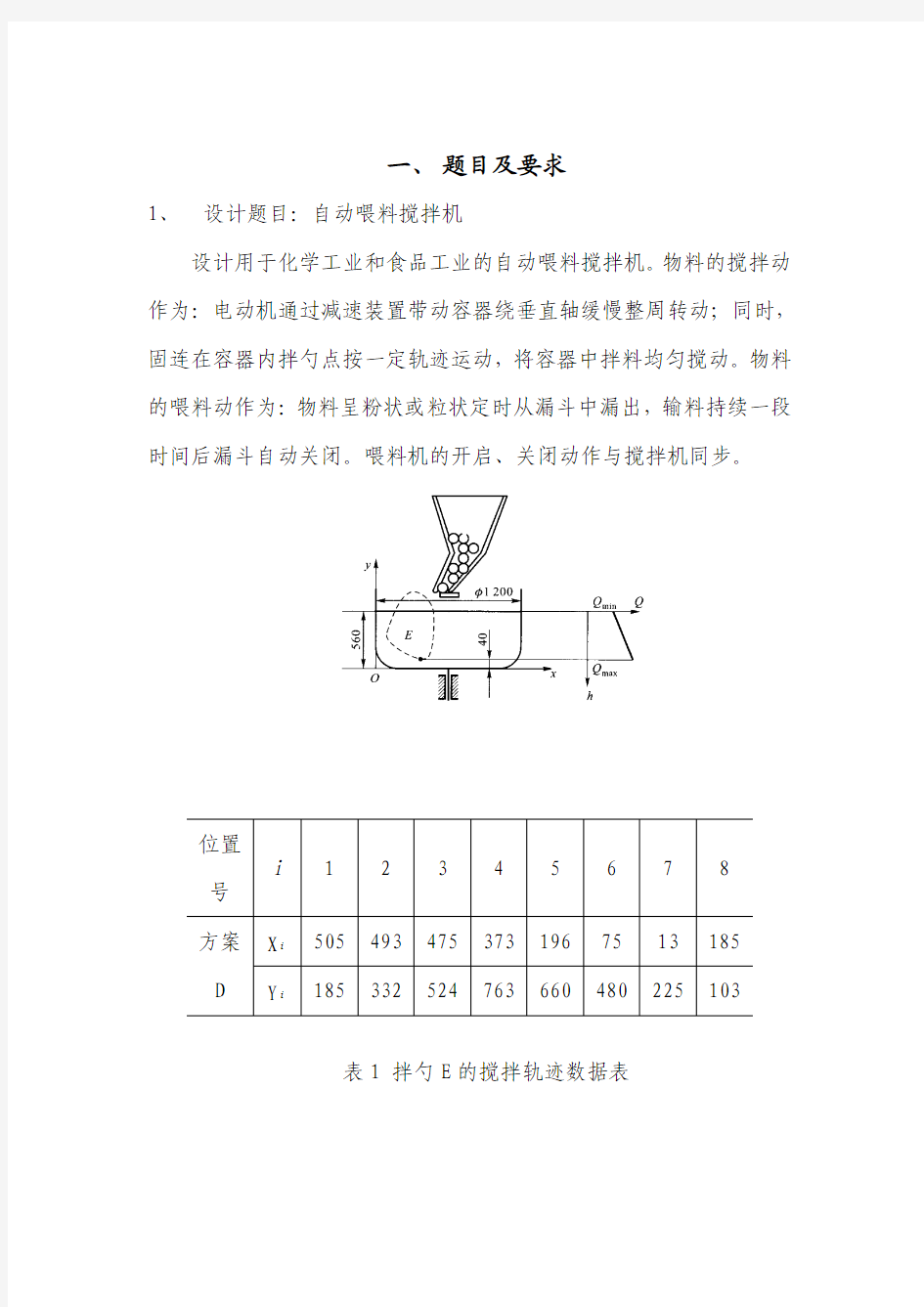
1、设计题目:自动喂料搅拌机
设计用于化学工业和食品工业的自动喂料搅拌机。物料的搅拌动作为:电动机通过减速装置带动容器绕垂直轴缓慢整周转动;同时,固连在容器内拌勺点按一定轨迹运动,将容器中拌料均匀搅动。物料的喂料动作为:物料呈粉状或粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭。喂料机的开启、关闭动作与搅拌机同步。
表1 拌勺E的搅拌轨迹数据表
2、功能要求:
a、要求物料的搅拌动作为:电动机通过减速装置带动容器饶垂直轴缓慢整周转动;同时固连在容器内拌勺将容器中拌料均匀搅动。
b、要求喂料动作为:物料呈粉状或颗粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭。
c、喂料机的开启、关闭动作要和搅拌机同步。物料搅拌好后的输出不考虑。
3、设计说明书内容要求:
a、本设计应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。
b、设计传动系统并确定其传动比分配,画出机器运动循环简图。
c、机构的造型及实现配合,选择和评价运动方案。
d、根据电机参数拟定机械传动方案,画出运动简图。
4、设计提示
a、此题包含较丰富的机构设计与分析内容,如平面连杆机构实现运动轨迹的设计、平面连杆机构的运动分析与动态静力分析、飞轮转动惯量确定,以及齿轮机构设计、凸轮机构设计等。由于题量较大,
教师可根据情况确定全部或部分完成该题的设计任务,也可以由一组学生完成全题。
b、可使固联在铰链四杆机构连杆上的某点作为拌勺的E点,实现预期的搅料轨迹。由于E点轨迹仅要求实现8点坐标,可以用多种方法设计该平面连杆机构。
二、功能分解:
1.容器带动里面的物料一起做匀速转动,是电动机带动减速装
置,减速装置在带动直轴容器缓慢进行整周转动实现的。
2.在电动机带动下拌勺沿搅拌数据表要求的轨迹搅拌,是由曲柄
四杆机构转动实现。
3.在电动机带动下实现填料机自动填料的功能,是利用凸轮机构
实现滑块左右移动,并保证在搅拌的同时,实现滑块开50s,
关40s,如此循环的进行。
三、机构运动循环图:
图(1)以设计要求的时间(s/t)为参考
图(2)拌勺的搅拌轨迹
四、机构选用
1.容器周转机构选用
1—电动机,2、4—传动轴,3—减速器,5,6—圆锥齿轮,7—容器该机构是容器的周转机构,容器的转动运用了锥齿轮。动力由电动机1输入,通过2传动轴的转动带动3减速器转动,减速器带动传动轴4传给圆锥齿轮5,锥齿轮5带动锥齿轮6的转动,从而使与锥齿轮6同心的容器7转动,从而带动容器7的转动。
2. 拌勺运动机构选用
1—拌勺,2、3、4—连杆,5—偏心轮
拌勺的运动选用了连杆机构。偏心轮5的运动带动连杆(4、3、2)的运动,同时带动了1拌勺的运动。
3.填料盒开关机构选用
1—齿轮,2、3—连杆,4—滑块,5物料盒
此机构为填料盒开关的选用机构。利用了齿轮、连杆、滑块机构
来达到控制开关的能力。齿轮1的匀速转动,带动连杆2上下运动,连杆2带动连杆3的运动,从而使滑块4左右滑动,起到控制填料盒5开关的功能。
4.电动机带动填料盒开关和拌勺运动机构选用
1—电动机,2、4—传动轴,3—减速器,5—蜗轮,6、8—齿轮,7—偏心轮
此机构为控制填料盒开关和拌勺机构的选用机构。运用了电动机、涡轮蜗杆、齿轮、偏心轮、减速器达到控制的目的。动力由电动机1转动,通过传动轴2转动传给减速器3带动传动轴4转动,同时带动与涡轮5带动齿轮6转动,6带动偏心轮7转动,从而带动固定在齿轮8上的连杆转动。
4.输出部分机构选用
1—电动机,2—减速器,3—蜗轮,4、6—圆锥齿轮,5—凸轮,7、8—齿轮,9—连杆,10—勺子
采用涡轮蜗杆、一对齿轮及圆锥齿轮来实现输出机构。发动机1带动减速器2转动,减速器2在带动蜗轮3转动,蜗轮3带动凸轮5及圆锥齿轮4转动,圆锥齿轮4带动齿轮8转动,齿轮8带动齿轮7转动,实现勺子的移动,然而凸轮5的转动实现连杆9用勺子10去把搅拌物料舀出,完成输出。
五、根据电机参数拟定机械传动方案
方案(一)
1—电动机, 2—减速器,3、 5—蜗轮,4、13、19—圆锥齿轮,6、8、17、18—齿轮,7—偏心轮, 21、12、16—连杆,9—滑块,10物料盒,14、15—拌勺,11—容器,20—凸轮
此方案的传动过程:
动力由电动机1输入,传给减速器2,再由减速器2带动蜗轮3,蜗轮3在带动圆锥齿轮4,圆锥齿轮4带动圆锥齿轮13转动,在带动容器11的均匀的转动。同时圆锥齿轮4带动蜗轮5的转动,带动固定齿轮6转动,带动固定偏心轮7的转动,同时带动四杆机构带动
搅拌勺的上下、左右的运动,从而实现搅拌的目的。同时固定偏心轮7也带动固定齿轮8的转动,也带动了固定在齿轮的连杆的运动带动滑块9左右的运动,从而实现控制物料盒10开关的目的。蜗杆3转动带动固定凸轮20的转动,从而使另一个锥齿轮及齿轮18转动,齿轮18转动同时带动齿轮17转动带动固定在涡轮上的凸轮转动,使连杆上下运动,当凸轮从最高点转到最低点时,取料勺进入容器装入物料;当凸轮转到最高点时,取料勺转出容器,同时控制取料勺的开与合,使物料从容器中输出。
六、机械传动的评价
方案一:
优点:①涡轮蜗杆传动结构紧凑,体积小、重量轻;工作平稳,冲击震动、噪音小。
②圆锥齿轮平稳,噪声小。
③齿轮传动能保证瞬时传动比恒定,平稳性较高,传递运动准确可靠;可实现较大的传动比;传动效率高,使用寿命长。
④凸轮机构可以使推杆得到各种预期的运动规律,且响应速度快,机构简单紧凑。
⑤连杆机构压力较小,承载能力较大,润滑好,摩擦小,加工制造容易,工作性可靠,在原动件运动规律不变的条件下,可改变各构件的相对长度来使从动件得到不同的运动规律;可方便地达到改变运动传递运动方向、扩大行程、实现增强和远距离传动的目的。
⑥滑块的加工比较容易控制在装配与拆卸时滑块也是相对比较方便的。
缺点:①涡轮蜗杆蜗杆传动效率低,一般认为蜗杆传动效率比齿轮传动低,发热量大,齿面容易磨损,成本高。
②圆锥齿轮传递效率低,制造复杂,成本高。
③齿轮制造及安装精度要求高,价格较贵,且不宜用于传动距离过大的场合。
④凸轮轮廓线与推杆之间为点、线接触,易磨损,制造也困难,而且从经济角度来说也很不划算,造价高昂。
⑤连杆机构易产生较大的误差积累,机械效率降低;不宜用于高速运动。
⑥滑块面与面的接触,易磨损,易产生热量大。
方案二、
0、电动机1、飞轮2、减速器 3 、减速器4、容器
5、拌勺E点运动轨迹
6、铰链四杆机构
7、漏斗
8、齿轮
9、齿轮10、蜗轮蜗杆11、蜗轮蜗杆12、锥齿轮
13、锥齿轮14、蜗轮15、蜗杆
优点:
1、蜗轮蜗杆传动结构紧凑,体积小、重量轻;工作平稳,冲击震动、噪
音小,有较大的传动比,使得6齿轮的齿数合理,不至于过大。
2、齿轮传动能保证瞬时传动比恒定,平稳性较高,传递运动准确可靠;传
递的功率和速度范围大; 结构紧凑、工作可靠,可实现较大的传动比;传动效率高,使用寿命长。
3、圆锥齿轮平稳,噪声小,且可以改变传递方向。
4、凸轮机构可以使推杆得到各种预期的运动规律,而且响应速度快,机
构简单紧凑。
5、连杆机构压力较小,承载能力较大,润滑好,摩擦小,加工制造容易,
工作性可靠。
6、可以保证相对精确的传动比。
缺点:
1、圆锥齿轮传递效率低,制造复杂,成本高。
2、蜗轮蜗杆蜗杆传动效率低,蜗杆传动效率比齿轮传动低,发热量大,齿面容易磨损,成本高。
4、凸轮轮廓线与推杆之间为点、线接触,易磨损,制造也困难。
5、连杆机构易产生较大的误差,机械效率降低。
6、必须保证铰链四杆机构和凸轮运动时的位置和角度关系,所以导致制造困难。
7、物料的输出装置与搅拌装置无法准确协调。
方案三、
七、最终选择方案及机构运动简图
0、电动机 1、飞轮 2、减速器 3 、减速器 4、容器5、拌勺E点运动轨迹 6、铰链四杆机构 7、漏斗 8、齿轮9、齿轮 10、蜗轮蜗杆 11、蜗轮蜗杆 12、锥齿轮
13、锥齿轮 14、蜗轮 15、蜗杆
八、心得体会
做了很久的机械原理课程设计作业今晚终于完成了,心里有些小开心,开始做时,发现到处都是难题,这也不懂那也不懂,心有些辛
酸和无奈,学习了一个学期的机械原理后,自己却似乎什么都不会,觉得有些惭愧,老师在课堂上很专心、耐心的给我们讲,可我还是很不会,是自己在课后花在学习上的时间太少了。
当我真的开始做时,我查了很多资料,很茫然的开始做。在做的过程中,培养了我自己自学的能力,独立思考问题,解决问题的能力。很多时候,不是我们完全不会,而是我们没有用心,态度不端正所造成的。就拿我来说,我本该早做好了的,可每天都在打着做课程设计的幌子,去完毕的东西,时间渐渐地过去,非得老师说截止时间是多少,才会开始去做,而且效率很高。这也就会产生为了应付老师而随便做做的,老师说不行再拿回来仔细做,也就这样渐渐地把这个设计弄得很熟悉,也就知道了这个机构是怎样运行的。人很多时候会产生很强的惰性,使得自己不会认真的去做某件事,这就影响了人生的道路。所以不管做什么事,我们都应该积极的努力地去做好,不要想着有巧合。
此次的课程设计让我明白了很多道理,人一定要有一颗平和的心态,不管遇到什么事,都要努力不怕困难的应对。还有就是不要太浮躁,越是浮躁越是误事。还有就是自信才会使自己在困境中挺身而出,获得成功。
九、参考文献
1.《机械设计基础课程设计》孙德志张伟华编科学出版社
2.《机械原理》孙恒主编高等教育出版社
3.《工程制图与AoutCAD绘图基础》王鸿钧编中国水利水电出版社出版
机械原理 课程设计说明书 设计题目:巧克力糖自动包装机 学院:机械与汽车工程学院 专业:机械设计制造及其自动化 学生姓名:梁先东 学号2013211065 班级: 134 指导教师姓名: 吕小莲 最终评定成绩 2014年12月16日
目录 设计任务 (5) 设计题目:巧克力糖包装机 (5) 设计要求 (5) 设计条件 (6) 设计任务 (6) 设计提示 (7) 第一章总论及设计要求分析 (7) 1.1功能要求 (7) 1.2原机的选择 (7) 1.3传动比的分配 (7) 1.4功能分析 (7) 1.5工作原理及工艺动作流程图 (8) 1.6机构的选用 (8) 第二章各机构的选用及组合 (9) 2.1主要执行机构方案设计原理 (9) 2.1.1 包装机送纸机构 (9) 2.1.2 包装机剪纸机构 (9) 2.1.3 包装机送料(糖)机构 (9) 2.1.4 包装机锥面成型机构 (10) 2.2圆台状巧克力糖包装机的总体布局 (11) 2. .21机械手的执行机构 (11) 2. .22包装机的总体布局: (13) 第三章圆台状巧克力糖的包装机传动系统 (13) 3主要执行机构方案设计原理 (13) 第四章巧克力包装机的设计 (14) 4.1粒状巧克力糖包装机的机械手设计 (14) 4.2粒状巧克力糖包装机的凸轮设计 (15) 4.211.顶糠杆槽凸轮5 (15) 4.22拨糠杆偏心凸轮7 (15) 4.23剪纸刀平面凸轮6 、抄纸板平面凸轮8 (16) 4.24.接糖杆圆柱凸轮9 (17) 4.25粒状巧克力糖包装机的槽轮设计 (17) 4.26粒状巧克力糖包装机的齿轮设计 (18)
机械原理课程设计 说明书 设计题目菠萝削皮机 专业机械设计制造及其自动化 班号 设计者 学号 MDA14060 完成时间 2016年
目录 1.1、设计题目 1.2、机械系统的方案拟定 1.2.1、工作原理确定 1.2.2、执行构件及其运动设计 1.2.3、原动机的选择 1.2.4、执行构件的运动协调性(运动循环图)设计 1.2.5、机构选型及组合 1.2.6、方案评价及优选 1.3、相关机构的尺度综合 1.4、课程设计体会及建议 1.5、主要参考文献
一.题目 菠萝是人们普遍喜爱的一种热带水果。菠萝虽好吃,但皮难削。由于菠萝的皮为花苞片状的硬皮,并呈现螺旋状的排列,而且每个花苞片上面都有一个较深的“果眼”或“黑芯”。通常,人们手工削菠萝皮的做法:一种是用锋利的水果刀先削去菠萝上的全部花苞片硬皮,然后再逐个挖去菠萝上残留的全部“果眼”;另一种是利用特制的U 型刀沿着菠萝花苞片和“果眼”排列的螺旋方向挖出一条深“沟”,连皮带“眼”一块去掉,需逐条螺旋线方向挖“沟”才能完成。所以手工削皮不仅费时费力,不安全,不卫生,而且对菠萝果肉的浪费也较大。虽目前市面上有一些水果削皮机的产品,但都不适合于菠萝水果削皮的需要。因此,为了满足家庭、酒店、水果店或果贩使用,现 需设计一种手动式或电动菠萝削皮装置。 菠萝表面的花苞片及“果眼”的分布形状如 图所示。菠萝通常呈现对称性的左右螺旋线排列, 左右螺旋线的螺旋线的螺旋升角均约为40°,每 条螺旋线上的果眼数为7-12个,每个菠萝的螺旋 线数为8条,而菠萝的高度与其直径之比为1.5左右,其高度一般在170mm——280mm范围之内。 二.机械系统的设计方案及拟定 根据我们的观察,发现在日常生活中,人工削菠萝的“果眼”都是通过专门刀具按一定角度一次一条的削。经过我的研究,发现可以
目录 一、设计题目 (2) 1、牛头刨床的机构运动简图 (2) 2、工作原理 (2) 二、原始数据 (3) 三、机构的设计与分析 (4) 1、齿轮机构的设计 (4) 2、凸轮机构的设计 (10) 3、导杆机构的设计 (16) 四、设计过程中用到的方法和原理 (26) 1、设计过程中用到的方法 (26) 2、设计过程中用到的原理 (26) 五、参考文献 (27) 六、小结 (28)
一、设计题目 ——牛头刨床传动机构 1、牛头刨床的机构运动简图 2、工作原理 牛头刨床是对工件进行平面切削加工的一种通用机床,其传动部分由电动机经 带传动和齿轮传动z 0—z 1 、z 1 、—z 2 ,带动曲柄2作等角速回转。刨床工作时,由导 杆机构2、3、4、5、6带动刨刀作往复运动,刨头右行时,刨刀进行切削,称为工 作行程;刨头左行时,刨刀不进行切削,称为空回行程,刨刀每切削完一次,利用 空回行程的时间,固结在曲柄O 2 轴上的凸轮7通过四杆机构8、9、10与棘轮11和棘爪12带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
二、原始数据 设计数据分别见表1、表2、表3. 表1 齿轮机构设计数据 设计内容齿轮机构设计 符号n01d01 d02 z0 z1 z1’m01 m1’2n2 单位r/min mm mm mm mm r/min 方案Ⅰ1440 100 300 20 40 10 3.5 8 60 方案Ⅱ1440 100 300 16 40 13 4 10 64 方案Ⅲ1440 100 300 19 50 15 3.5 8 72 表2 凸轮机构设计数据 设计内容凸轮机构设计 符号L O2O4 L O4D φ[α]δ02 δ0 δ01δ0/ r0 r r 摆杆运动规 律单位mm mm °°°°°°mm mm 方案Ⅰ150 130 18 45 205 75 10 70 85 15 等加速等减 速 方案Ⅱ165 150 15 45 210 70 10 70 95 20 余弦加速度方案Ⅲ160 140 18 45 215 75 0 70 90 18 正弦加速度方案Ⅳ155 135 20 45 205 70 10 75 90 20 五次多项式 表3 导杆机构设计数据 设计内容导杆机构尺度综合和运动分析 符号K n2L O2A H L BC 单位r/min mm 方案Ⅰ 1.46 60 110 320 0.25L O3B 方案Ⅱ 1.39 64 90 290 0.3L O3B 方案Ⅲ 1.42 72 115 410 0.36L O3B 表4 机构位置分配表 位置号位置 组 号 学生号 A B C D 1 1 3 6 8/ 10 2 5 8 10 7/ 1/ 4 7 8 10 1 5 7/ 9 12 2 1/ 4 7 8 11 1 3 6 8/ 11 2 5 7/ 9 11 1/ 3 6 8/ 11 3 2 5 7/ 9 12 1/ 4 7 9 12 1 3 6 8/ 12 2 4 7 8 10
机械原理课程设计说明书 自动喂料搅拌机 院-系:工学院机械系 专业:机械工程及自动化 年级: 2009级 学生姓名:奎剑 学号: 200903050732 指导教师:王海生 2011年9月
机械原理课程设计说明书 摘要 自动喂料搅拌机用于化学工业和食品工业,它的主体是喂料机构和交办机构,同时还需要采用各种机构实现动力的传递。为此,我们对各种动力传动机构和执行机构进行选择,之后再进行分析比较挑选出最好的机构,接着按照给定的机械系统的要求进行功能分解,再根据工艺要求画出运动循环图。有了上面一系列准备工作之后就可以进行机构的选型与组合,设计机械系统方案,对具体运动方案进行评定和选择,最终选出最优设计方案,画出设计方案总图,并写出这次课程设计的具体体会。 关键词;自动喂料搅拌机;传动机构;执行机构;运动循环图;机械系统方案
机械原理课程设计说明书 目录 一、机器的工作原理及外形图 (1) 二、原始数据 (1) 三、设计要求 (2) 四、机器运动系统简图 (3) 五、运动循环图 (3) 六、传动方案设计 (4) 七、机构尺寸的设计 (4) 1、实现搅料拌勺点E轨迹的机构的设计…………………………………………… ..4 2、设计实现喂料动作的凸轮机构 (5) 3、连杆机构的动态静力分析: (6) 4、设计不完全齿轮与曲柄所在齿轮的传动 (7) 八、飞轮转动惯量的确定 (8) 九、机械运动方案评价 (9) 十、方案二基本介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...... . . . 10十一、心得体会.. (11) 十二、参考文献 (11)
Harbin Institute of Technology 课程设计说明书(论文) 课程名称:机械原理 设计题目:产品包装生产线(方案3) 院系:机电工程学院 班级:1208107 设计者:刘运昌 学号:1120810705 指导教师:翟文杰 设计时间:2014.6.23--2014.6.29
哈尔滨工业大学 产品包装生产线(方案3) 一、设计课题概述 如图1所示,输送线1上为小包装产品,其尺寸为长*宽*高=600*200*200,采取步进式输送方式,送第一包产品至托盘A上(托盘A上平面与输送线1的上平面同高)后,托盘A下降200mm,第二包产品送到后,托盘A上升200mm,然后把产品推入输送线2。原动机转速为1430rpm,产品输送量分三档可调,每分钟向输送线2分别输送8、16、24件小包装产品。 图1功能简图 二、设计课题工艺分析 由题目和功能简图可以看出,推动产品在输送线1上运动的是执行机构1, 图2 运动循环图 图1中T1为执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期。由图2可以看出,执行构件1是作连续往复移动的,而执行构件2则有一个间歇往复运动,执行构件3作一个间歇往复运动。三个执行构
件的工作周期关系为:2T1= T2=T3。执行构件3的动作周期为其工作周期的1/8. 三、设计课题运动功能分析及运动功能系统图 根据前面的分析可知,驱动执行构件1工作的执行机构应该具有运动功能如图3所示。该运动功能把一个连续的单向转动转换为连续的往复移动,主动件每转动一周,从动件(执行构件1)往复运动一次,主动件的转速分别为8、16、24 rpm。 图3 执行机构1的运动功能 由于电动机转速为1430rpm,为了在执行机构1的主动件上分别得到8、16、24 rpm的转速,则由电动机到执行机构之间的传动比i z有3种分别为: 总传动比由定传动比i c与变传动比i v组成,满足以下关系式: i z1 = i c i v1 i z2=i c i v2 i z3=i c i v3 三种传动比中i z1最大,i z3最小。由于定传动比i c是常数,因此3种传动比中i v1最大,i v3最小。若采用滑移齿轮变速,其最大传动比最好不要大于4,即: i v1=4 则有: i c=错误!未找到引用源。 故定传动比的其他值为: i v2=错误!未找到引用源。.00 i v3=错误!未找到引用源。
. 机械原理课程设计答辩参考选题 1.机构选型? 2.何谓何谓机构尺度综合? 3.平面连杆机构的主要性能和特点是什么? 4.何谓机构运动循环图? 5.机构运动循环图有哪几种类型? 6.在机构组合中什么是串联式组合? 7.在机构组合中什么是并联式组合? 8.在机构组合中什么是反馈式组合? 9.平面机构的构件常见的运动形式有哪几种? 10.举例说明有哪些机构可以实现将转动变成直线移动。 11.举例说明有哪些机构可以实现将转动变成摆动。 12.举例说明有哪些机构能满足机构的急回运动特性? 13.对于外凸凸轮,为了保证有正常的实际轮廓,其滚子半径选取有什么要求? 14.要求一对外啮合直齿圆柱齿轮传动的中心距略
小于标准中心距,并保持无侧隙啮合,此时应采用什么传动? 15.在凸轮机构中,从动件按等加速、等减速运动规律运动时,有何冲击? .. . 16.蜗杆的标准参数在何处,蜗轮的标准参数在何处? 17.平面四杆机构共有几个瞬心,其中有几个绝对瞬心、几个相对瞬心? 18.在平面机构中,每个高副引入几个约束、每个低副引入几个约束?; 19.当两构件组成转动副时,其瞬心位于何处?当构件组成移动副时,其瞬心位于何处? 20.机械效率可以表达为什么值的比值? 21.标准渐开线斜齿圆柱齿轮传动的正确啮合条件是什么? 22.标准渐开线直齿圆柱齿轮的基本参数是哪几个? 23.从机械效率的观点看,机械的自锁条件是什么?
24.试叙机构与运动链的区别? 25.试计算所设计机构的自由度。 26.试说明所设计机构的工作原理。 27.四杆机构同样可以将旋转运动的输入变为直线运动的输出,为什么有的摇摆式输送机要采用6杆机构? 28.机械原理课程设计的任务一般可分为几个部分? 29.机械原理课程设计的方法原则上可分为几类? 30.机械运动方案设计主要包括哪些内容? 31.执行机构按运动方式及功能可分为几类? .. . 32.做匀速转动的机构常用的有哪几种? 33.做非匀速转动的机构常用的有哪几种? 34.分析凸轮机构在本设计中所起的作用。 35.做往复移动的机构常用的有哪几种? 36.平面连杆机构的主要性能和特点是什么? 37.凸轮机构的主要性能和特点是什么? 38齿轮机构的主要性能和特点是什么? 39.分析影响行程速比系数K值大小的几何尺寸。
目录第一章设计题目 1.1 设计数据与要求 1.2 设计任务 第二章功能分解 第三章机构设计 3.1 机构选型 3.2 机构最终成型与凸轮设计 第四章其他推包机构的设计方案 第五章推包机构设计方案的评定与选择第六章推包设计方案的最终简图 第七章心得体会 第八章参考文献
第一章 设计题目 现需设计某一包装机的推包机构,要求待包装的工件1 (见附图33)先由输送 带送到推包机构的推头2 的前方,然后由该推头2 将工件由a 处推至b 处(包 装工作台),再进行包装。为了提高生产率,希望在推头2结束回程(由b 至a )时,下 一个工件已送到推头2的前方。这样推头2就可以马上再开 始推送工件。这就要求推头2在回程时先退出包装工作台, 然后再低头,即从台面的下面回程。因而就要求推头 2 按图示的abcdea 线路运动。即实现“平推—水平退回-下 降-降位退回-上升复位”的运动。 包装工作台d e H s b c 1a 2 附图33 推包机构执行构件运动要求
图一推包机构执行构件运动要求 1.1、设计数据与要求 要求每5~6s包装一个工件,且给定:L=100mm, S=25mm, H=30mm.行程速比系数K在1.2~1.5范围内选取,推包机由电动机驱动。 在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回行程的时间,提高工效。至于“cdea”部分的线路形状不作严格要求。 1.2、设计任务 1)、至少提出两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计。 2)、确定电动机的功率与转速。 3)、设计传动系统中各机构的运动尺寸,绘制推包机的机构运动简图。 4)、对输送工件的传动系统提出一种方案并进行设计。 5)、对所用到的齿轮进行强度计算,确定其尺寸。 6)、进行推包机结构设计,绘制其装配图。 7)、编写课程设计说明书。
《机械原理课程设计》设计说明书的编写要求 机械设计系(2010) 一、设计说明书的内容 设计说明书的内容应根据设计任务的要求而定,一般来讲包括以下几个方面: (1)目录(标题和页次); (2)设计题目(设计条件和要求); (3)全部原始数据; (4)机械运动设计方案的拟定,(设计思路的说明,所选用机构的工作原理及运动特性)机构的组合方式,进行方案分析与评价; (5)机械运动循环图; (6)机械运动简图; (7)采用的设计方法及其原理的简要说明; (8)设计计算过程、公式和结果。若有计算机程序,则应画出程序框图,写出各子程序名称和功能; (9)用表格列出计算结果,并绘制出主要的运动曲线图; (10)对计算结果的分析讨论,作出概括性的结论; (11)列出主要的参考资料。 二、注意事项 (1)设计说明书用钢笔、中性笔书写,采用统一的课程设计用纸; (2)对自成单元的内容应有大小标题,做到层次分明醒目突出;全部图表应统一编号。 (3)编写说明书时应做到条理清楚、叙述简明、重点突出、计算正确、文句通顺、书写整洁; (4)所用的公式和数据应注册来源(参考资料的编号和页次); (5)全部计算中所用的符号和脚注必须前后一致、不能混淆; (6)绘制机械运动简图时应采用规定的符号,按比例作图; (7)对计算结果应有简明的结论。如果实际所取的数值与计算结果有较大 差异,应作必要的解释,说明原因; (8)说明书编写完毕后应加上封面,装订成册,并装入课程设计专用袋
目录 设计任务书-----------------------------------------------------2 1.设计工作原理--------------------------------------------------4 2.功能分解图,执行机构动作分解图-----------------------6 3.运动方案的选择与比较---------------------------------------9 4.机构运动总体方案图(机构运动简图)-----------------10 5.工作循环图------------------------------------------------------16 6.执行机构设计过程及尺寸计算------------------------------18 7.凸轮设计分段图.轮廓图.设计结果---------------------21 8.机构运动分析计算机辅助设计流程------------------------25 9.程序清单(主程序和子程序)------------------------------26 10.十一运行结果及运动线图------------------------------------31 11.设计总结----------------------------------------------------------32 12 参考资料----------------------------------------------------------33
机械原理课程设计说明书 设计题目: 指导老师:哈丽毕努 设计者:马忠福 所属院系:新疆大学机械工程学院专业:机械工程及自动化 班级:机械 10-7 班 完成日期: 2014年7月 新疆大学 《机械原理课程设计》任务书
班级: 机械姓名: 马忠福 课程设计题目: 冲压式蜂窝煤成型机 课程设计完成内容: 设计说明书一份(主要包括:运动方案设计、方案的决策与尺度综合、必要的机构运动分析和相关的机构运动简图) 发题日期: 2014 年 6 月 15 日 完成日期: 2014 年 7 月 25 日 指导教师: 哈利比努
目录 一、蜂窝煤的功能和设计要求 (1) 二、工作原理和工艺动作分解 (2) 三、根据工艺动作顺序和协调要求拟定运动循环图 (2) 四、执行机构的选型 (3) 五、机械运动方案的选定和评价 (4) 六、机械传动系统的传动比和变速机构 (5) 七、画出机械运动方案简图 (5) 八、对机械传动系统和执行机构进行尺寸计算 (6) 1、带传动计算: (6) 2、齿轮传动计算 (6) 3、曲柄滑块机构计算 (6) 4、槽轮机构计算 (7) 5、扫屑凸轮计算 (7) 九、机械方案运动简图 (8) 十、参考文献 (9)
一、蜂窝煤的功能和设计要求 冲压式蜂窝煤成型机是我国城镇峰窝煤(通常又称煤饼)生产厂的主要生产设备,这种设备由于具有结构合理、质量可靠、成型性能好、经久而用、维修方便等优点而被广泛采用。 冲压式蜂窝煤成型机的功能是将粉煤加入转盘的模简内,经冲头冲压成峰窝煤。为了实现蜂窝煤冲压成型,冲压式蜂窝煤成型机必须完成五个动作: (1)粉煤加料; (2)冲头将蜂窝煤压制成型; (3)清除冲头和出煤盘的积屑的扫屑运动; (4)将在模简内的冲压后的蜂窝煤脱模; (5)将冲压成型的蜂窝煤输送。 图1.1冲头、脱模盘、扫屑刷、模筒转盘位置示意图 冲压式蜂窝煤成型机的设计要求和参数有: (1)蜂窝煤成型机的生产能力:30次/min; (2)驱动电机:Y180L-8,功率N=111KW;转速n=710r/min; (3)机械运动方案应力求简单; (4)图1.1表示冲头、脱模盘、扫屑刷、模筒转盘的相互位置情况。实际上冲头和脱模盘都与上下移动的滑梁连成一体,当滑梁下冲时将粉煤冲压成蜂窝煤,脱模盘将以压成的蜂窝煤脱模。在滑梁上升过程中扫屑刷将冲头和脱模盘刷除粘着粉煤,模筒转盘上均布了模筒,转盘的间歇机构使加料的模筒进入冲压位置、成型的模筒进入脱模位置、空模筒进入加料位置。 (5)为了改善蜂窝煤冲压成型的质量,希望冲压机构在冲压后有一保压时间。 (6)由于冲头压力较大,希望冲压机构具有增力功能,以增大有效作用,减小原动机的功率。
目录 一. 设计要求-------------------------------------------------------3 1. 压床机构简介---------------------------------------------------3 2. 设计内容--------------------------------------------------------3 (1) 机构的设计及运动分折 ----------------------------------------3 (2) 机构的动态静力分析 -------------------------------------------3 (4) 凸轮机构设计---------------------------------------------------3 二.压床机构的设计: -------------------------------------------- 4 1. 连杆机构的设计及运动分析------------------------------- 4 (1) 作机构运动简图--------------------------------------------- 4 (2) 长度计算----------------------------------------------------- 4
(3) 机构运动速度分析------------------------------------------- 5 (4) 机构运动加速度分析----------------------------------------6
课程设计说明书 课程名称:机械原理课程设计 设计题目:半自动钻床 专业:机械电子工程 班级: 学生姓名: 学号: 成员: 指导教师: 日期:
一、设计要求 一、设计题目及原始数据 设计加工所示工件ф12mm孔的半自动钻床。进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。 半自动钻床设计数据参看下表。 半自动钻床凸轮设计数据表 方案号 进料机构 工作行程 mm 定位机构 工作行程 mm 动力头 工作行程 mm 电动机转速 r/mm 工作节拍 (生产率) 件/min C3020109601 二、设计方案提示 1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。 2. 除动力头升降机构外,还需要设计送料机构、定位机构。各机构运动循环要求见下表。 机构运动循环要求表 凸轮轴转角10o20o30o45o60o75o90o105o~270o300o360o送料快进休止快退休止 定位休止快进休止快退休止 进刀休止快进快进快退休止 3. 可采用凸轮轴的方法分配协调各机构运动。
三、设计任务 1.半自动钻床至少包括凸轮机构、齿轮机构在内的三种机构; 2.设计传动系统并确定其传动比分配,并在图纸上画出传动系统图; 3. 图纸上画出半自动钻床的机构运动方案简图和运动循环图; 4.凸轮机构的设计计算。按各凸轮机构的工作要求,自选从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。对盘状凸轮要用电算法计算出理论廓线、实际廓线值。画出从动件运动规律线图及凸轮廓线图; 5.设计计算其他机构; 6.编写设计计算说明书; 7.学生可进一步完成:凸轮的数控加工,半自动钻床的计算机演示验证等。
机械原理课程设计说明书设计题目:压床机构设计 自动化院(系)机械制造专业 班级机制0901 学号20092811022 设计者罗昭硕 指导老师赵燕 完成日期2011 年1 月4日
一、压床机构设计要求 1 .压床机构简介及设计数据 1.1压床机构简介 图9—6所示为压床机构简图。其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮z1-z2、z3-z4、z5-z6将转速降低,然后带动曲柄1转动,六杆机构使滑块5克服阻力Fr而运动。为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。 1.2设计数据
1.1机构的设计及运动分折 已知:中心距x1、x2、y, 构件3的上下极限角,滑块的冲程H,比值CE /CD、EF/DE,各构件质心S的位置,曲柄转速n1。 要求:设计连杆机构, 作机构运动简图、机构1~2个位置的速度多边形和加速度多边形、滑块的运动线图。以上内容与后面的动态静力分析一起画在l号图纸上。 1.2机构的动态静力分析 已知:各构件的重量G及其对质心轴的转动惯量Js(曲柄1和连杆4的重力和转动惯量(略去不计),阻力线图(图9—7)以及连杆机构设计和运动分析中所得的结果。 要求:确定机构一个位置的各运动副中的反作用力及加于曲柄上的平衡力矩。作图部分亦画在运动分析的图样上。 1.3飞轮设计 已知:机器运转的速度不均匀系数δ.由两态静力分析中所得的平衡力矩Mb;驱动力矩Ma为常数,飞轮安装在曲柄轴A上。 要求:确定飞轮转动惯量J。以上内容作在2号图纸上。 1.4凸轮机构构设计 已知:从动件冲 程H,许用压力角 [α ].推程角δ。,远 休止角δ?,回程角δ', 从动件的运动规律见 表9-5,凸轮与曲柄共 轴。 要求:按[α]确定 凸轮机构的基本尺 寸.求出理论廓 线外凸曲线的最小曲 率半径ρ。选取滚子 半径r,绘制凸轮实际 廓线。以上内容作在 2号图纸上 压床机构设计 二、连杆机构的设计及运动分析
机械原理课程设计说明书 设计题目:包装机推包机构运动简图与传动系统设计学院:机电学院 专业:机械工程及其自动化 姓名: 学号: 小组成员: 指导老师:
目录 一、设计题目 (2) 二、功能分解 (3) 三、运动转换 (3) 四、执行机构的选择与比较 (3) 五、原动机的选择 (5) 六、运动方案的拟定 (6) 七、传动机构 (8) 八、运动示意图 (10) 九、运动循环图 (11) 十、执行机构计算 (12) 十一、参考资料 (8) 十二、小结 (8)
一、设计题目 现需要设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。这样推头2就可以马上再开始推送工作。这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。因而就要求推头2按图示的abcdea线路运动。即实现“平推—水平退回—下降—降位退回—上升复位”的运动。 设计数据与要求: 要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm。行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。 在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。至于“cdea”部分的线路形状不作严格要求。 图1 推包机构执行构件运动要求 设计任务: 1.至少提出两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计; 2.确定电动机的功率与转速; 3.设计传动系统中各机构的运动尺寸,绘制推包机的机构运动简图; 4.对输送工件的传动系统提出一种方案并进行设计; 5.编写课程设计说明书。
目录设计任务书 (2) 原动机的选择 (5) 传动机构的选择与比较 (7) 执行机构的选择与比较 (9) 机构系统运动方案的拟定与比较 (10) 机构系统的运动循环图 (16) 机构功能分解图与动作分解图 (20) 机构的设计 (22) 机构的运动简图 (26) 必要的计算公式与有关调用子程序 (27) 程序图 (33) 参考文献·································· 一、设计任务书 (1)、功能要求及工艺动动作分解 ○1总功能要求 在产品上打印记号
○2工作原理及工艺动作分解 自动打印机系统的工作原理图及工艺动作如图(1)所示,该系统有电机驱动主轴上的执行机构,完成打印任务。<1>首先是由送料曲柄滑块机构1连续旋转运动,带动连杆2旋转,再经滑块3往复移动,把工件6送到指定的位置<2>而此时凸轮8已由远休止运动到近休止,摆杆7与凸轮保持接触,并摆动一个角度?,从而带动摆杆5也转动?角,到打印工件所需位置<3>紧接着是打印印头动作完成打印。 (2)、原始数据和数据要求 ○1实现送料,凸轮,打印头等运动机构由一个电动机带动,通过一系列的减速机构,传动机构使该机构具有80r/min的打印速度。 ○2电动机功率P=0.8kw,转速n=980r/min.电机安放在整个装置的正下位置。 ○3根据打印产品的要求:长100-150mm,宽70-100mm,高30-50mm.因此须在此范围内满足要求设计如前一页图。 ○4并且要求打印设计,满足产品的重量在5-10N之间 ○5曲柄滑块由最左端向右运动过程中遇到如图(1)所示的送料桶中落下的工件并把它推到指定的打印位置,其中滑块的两极限位置间距为89mm。 ○6印头摆角为4°,印头工作行程与返回行程分别由凸轮的回程角φ 和升程角φ0=70o决定。 1=120o (3)、运动方案构思提示 ○1实现送料机构-夹紧功能的机构可以采用凸轮机构或有一定停歇时间的连杆机构。当送料,夹紧机构的执行件将产品送到指定位置,执行机构停
机械原理课程设计自动喂料搅拌机 姓名:张帅康 时间2014.7.4
目录 1课题要求 2方案设计分析 3设计过程 3.1各部分机构分析计算 3.2机构的构件结构尺寸等级和参数的确定 3.3个部分机构简图循环图 4机构总图 5机构设计过程说明运动过程 6总结 7参考资料目录
1课题设计要求和题目 设计用于化学工业和食品工业的自动喂料搅拌机。物料的搅拌动作为:电动机通过减速装置带动容器绕垂直轴缓慢整周转动;同时,固连在容器内拌勺点E沿图1虚线所示轨迹运动,将容器中拌料均匀搅动。物料的喂料动作为:物料呈粉状或粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭。喂料机的开启、关闭动作应与搅拌机同步。物料搅拌好以后的输出可不考虑。工作时假定拌料对拌勺的压力与深度成正比,即产生的阻力呈线性变化,如图1示。 图1 喂料搅拌机外形及阻力线图
2方案设计分析 方案A 自动喂料搅拌机的动力由电动机输出,电动机输出轴上装有一个飞轮(飞轮作用:使机械运转均匀。当飞轮高速旋转时,由于惯性作用可贮藏能量,也可放出能量,克服运动阻力,使发动机运转平稳。其慢慢降速,避免猛然低速导致停车。因此可使机械运转均匀,旋转平稳。)电动机输出轴与变数箱相连,经变速箱变速后有两个输出分别为输出1和输出2。输出1经带齿轮把动力传递给容器,带动容器转动;输出2传递路线又分两部分,一部分经锥齿轮传递给四杆机构作搅拌运动,另一部分经V带传递给蜗杆蜗轮机构带动凸轮转动,凸轮控制着下料口的开与关。
方案B
3.设计过程 1.各部分机构分析计算 功能执行构件工艺动作执行机构 喂料摆杆间歇摆动摆动从动件盘形凸轮机构 旋转回转轴回转运动蜗轮蜗杆机 构 搅拌拌勺回转运动曲柄摇杆机 构 拌勺E的搅拌轨迹、搅拌机的运动分析和动态静力分析及飞轮转动惯量 表1拌勺E的搅拌轨迹数据 位置号i 1 2 3 4 5 6 7 8 方案 A x 505 493 475 373 196 75 13 185 y 185 332 524 763 660 480 225 103
小海河清淤及污泥固化方案说明书 1. 工程概况: 工程名称:小海河河道清淤工程 工程实施单位:桥头镇水利部门 设计单位:中国环境科学研究院 山东省城建设计院 本工程位于东莞市桥头镇,小海河从南到北贯穿整个桥头镇,是桥头镇的纳污行洪河道,全长3.2km,河宽约70~80m。本工程内容主要是河道清淤及淤泥处置,需清淤河道长度约3.0km。根据韶关地质工程勘察院提供的《东莞市桥头镇小海河水体修复工程工程测量技术报告》(2008.12)小海河淤泥深度0.2-0.9m,平均深度0.6m。,考虑到应留有余量故本工程设计清淤深度为0.8m,清淤总面积约15万m2,总计清淤量约12万m3。 2. 清淤方案 目前,国内外经常使用的主要有两种清淤方法,即干法清淤和湿法清淤。分别介绍如下: (1)干法清淤:河道干式清淤(开挖)法是对有水河道先将河道截流,排除河床地面水,后使用井点降水系统,将要清淤的河床泥泞变成含水量在85%左右的淤泥,再用机械设备(或人工)清淤(开挖)。其主要施工步骤为: ①对有水河道必须先打坝拦水,后将施工地段的地面水自流向下游放水,或者用水泵强制排出。
②如上游或地下水渗流严重则可考虑将射流式井点降水系统安装在施工处(河床、河滩、新开河地面)的两侧,每侧井管的布置区长度每端应超过施工处5米以上(此数值应根据实际情况,经计算最终确定),将施工处地面下一定深度的地下水,通过该系统抽出,以致即使施工处的淤泥中的水向下渗漏,仍可通过该系统连续抽出,从而使施工处的污泥变成含水率在85%左右的淤泥,所抽取的水,经由渠或管道排出。 ③使用人工或清淤(开挖)配套设备挖掘到设计清淤深度。在此推荐使用反铲挖土机进行挖掘,密罐车运输,以提高工作效率,并防止淤泥在运输过程中造成二次污染。 此法的优点在于设备配套性好、工作效率高、能很好的控制清淤厚度,彻底清除设计范围内的淤泥,却不致开挖、破坏河底原状地基土。缺点是在污泥的运输过程中容易洒漏,对环境造成二次污染。如采用密罐车运输,并合理组织装卸运输,则可解决此问题,而且能获得很好的经济效益。 (2)湿法清淤:湿法清淤是目前大江大河河道疏浚工程中最常使用的方法。其通常采用绞吸式挖泥船,依靠船上吸水管前端围绕吸水管装设旋转绞刀装置,将河底泥沙进行切割和搅动,再经吸泥管将绞起的泥沙物料,借助强大的泵力,输送到泥沙物料堆积场,它的挖泥、运泥、卸泥等工作过程,可以一次连续完成。绞吸船如图2-1所示。 此法优点在于: ①产量大,泵距远。支叉河道清淤所常用的绞吸式挖泥船每小时清水流量最高可达两千立方米;把泥沙或碎岩物料依靠强大动力通过泥泵和排泥管线,泵送出千米之外。物料的挖掘和输送一次性完成,且全程密封管道运送,彻底解决了污泥二次污染的问题。
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:机械原理课程设计 设计题目:产品包装生产线(方案10) 院系: 班级:机械一班 设计者: 学号: 指导教师: 设计时间:2014.06.30-2014.07.07 哈尔滨工业大学
目录 一.题目要求 (3) 二.题目解答 1.工艺方法分析 (3) 2.运动功能分析及图示 (4) 3.系统运动方案的拟定 (8) 4.系统运动方案设计 (13) 5.运动方案执行构件的运动时序分析 (19) 6.运动循环图 (21)
产品包装生产线(方案10) 1.题目要求 如图1所示,输送线1上为小包装产品,其尺寸为长*宽*高=600*200*200,采取步进式输送方式,将第一包和第二包产品送至托盘A上(托盘A上平面与输送线1的上平面同高),每送一包产品至托盘A上,托盘A下降200mm。当第三包产品送到托盘A上后,托盘A上升405mm、顺时针旋转90°,把产品推入输送线2。然后,托盘A顺时针回转90°、下降5mm恢复至原始位置。原动机转速为1430rpm,产品输送量分三档可调,每分钟向输送线2分别输送12、18、30件小包装产品。 图1功能简图 2.题目解答 (1)工艺方法分析 由题目和功能简图可以看出,推动产品在输送线1上运动的是执行机构1,在A处使产品上升、转位的是执行构件2,在A处把产品推到下一个工位的是执行构件3,三个执行构件的运动协调关系如图所示。 下图中T1为执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期,T3’是执行构件3的动作周期。由图2可以看出,执行构件1是作连续往复移动的,而执行构件2则有一个间歇往复运动和一个间歇转动,执行构件3作一个间歇往复运动。三个执行构件的工作周期关系为:3T1= T2= T3。执行构件3的动作周期为其工作周期的1/20。
目录 设计任务书-----------------------------------------------------2 1.设计工作原理--------------------------------------------------4 2.功能分解图,执行机构动作分解图-----------------------6 3.运动方案的选择与比较---------------------------------------9 4.机构运动总体方案图(机构运动简图)-----------------10 5.工作循环图------------------------------------------------------16 6.执行机构设计过程及尺寸计算------------------------------18 7.凸轮设计分段图.轮廓图.设计结果---------------------21 8.机构运动分析计算机辅助设计流程------------------------25 9.程序清单(主程序和子程序)------------------------------26 10.十一运行结果及运动线图------------------------------------31 11.设计总结----------------------------------------------------------32 12 参考资料----------------------------------------------------------33
设计任务书 一、设计题目及原始数据 设计加工所示工件ф12mm 孔的半自动钻床。进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。 二、设计要求及方案提示 要求设计该半自动钻床的送料、定位、及进刀的整体传动系统。其中: 1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。 2. 除动力头升降机构外,还需要设计送料机构、定位机构。各机构运动循环要求见下表。 3. 可采用凸轮轴的方法分配协调各机构运动。 机构运动循环要求表 10 o 20o 30o 45o 60o 75o 90o 105o~270o 300o 360o 送料 快进 休止 快退 休止
《机械原理》课程设计任务书 搅拌机机构设计与分析 1.机构简介 搅拌机常应用于化学工业和食品工业中对拌料进行搅拌工作如附图1(a)所示,电动机经过齿轮减速,通过联轴节(电动机与联轴节图中未画)带动曲柄2顺时针旋转,驱使曲柄摇杆机构1-2-3-4运动,同时通过蜗轮蜗杆带动容器绕垂直轴缓慢旋转。当连杆3运动时,固联在其上的拌勺E即沿图中虚线所示轨迹运动而将容器中的拌料均匀拨动。 工作时,假定拌料对拌勺的压力与深度成正比,即产生的阻力按直线变化,如附图1(b)所示。 附图1 搅拌机构(a)阻力线图(b)机构简图 2.设计数据 设计数据如附表1-1所示。 附表1-1 设计数据
3. 设计内容 连杆机构的运动分析 已知:各构件尺寸及重心位置,中心距x,y,曲柄2每分钟转速n 2。 要求:做构件两个位置(见附表1-2)的运动简图、速度多边形和加速度多边形,拌勺E 的运动轨迹。以上内容画在2号图纸上。 附表1-2 机构位置分配图 曲柄位置图的做法,如图1-2所示:取摇杆在左极限位置时所对应的曲柄作为起始位置1,按转向将曲柄圆周作十二等分,得12个位置。并找出连杆上拌勺E 的各对应点E 1,E 2…E 12,绘出正点轨迹。按拌勺的运动轨迹的最低点向下量40mm 定出容器地面位置,再根据容器高度定出容积顶面位置。并求出拌勺E 离开及进入容积所对应两个曲柄位置8’和11’。附图1-2 曲柄位置 目 录 1课程设计的任务与要求
1.1机械原理课程设计任务书 1.2机械原理课程设计的参考数据 1.3机械原理课程设计的目的与要求 1.3.1、机械原理课程设计的目的 1.3.2、牛头刨床的工作原理与机构组成(设计三个方案并选出其中最合适的方案并说明理由。每一小组成员最终设计方案允许一致,但每个人的尺寸参数需不一致) 2课程设计的机构 2.1原动件设计 2.1.1电机选型 2.1.2减速器设计(选择好传动比,画出轮系即可) 2.2运动循环图 2.3导杆机构的运动分析 2.4导杆机构的动态静力分析 2.5齿轮机构设计 2.6凸轮机构设计 2.7飞轮设计 3设计小结 4参考文献 心得体会 机械原理课程设计是培养学生综合运用所学知识。发现,提出,分析和解决实际问题,锻炼实践能力的重要环节,是对学生实际工作能力的具体训练和考察过
一、机器的工作原理及原始数据 工作原理 设计用于化学工业和食品工业的自动喂料搅拌机。物料的搅拌动作为:电动机通过减速装置带动容器绕垂直轴缓慢整周转动;同时,固连在容器内拌勺点E 沿图1虚线所示轨迹运动,将容器中拌料均匀搅动。物料的喂料动作为:物料呈粉状或粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭。喂料机的开启、关闭动作应与搅拌机同步。物料搅拌好以 后的输出可不考虑。 图1 喂料搅拌机外形及阻力线图 原始数据 工作时假定拌料对拌勺的压力与深度成正比,即产生的阻力呈线性变化,如图1示。 表1.1 拌勺E 的搅拌轨迹数据表 位置号 i 1 2 3 4 5 6 7 8 方案A i x 525 300 470 395 220 100 40 167 i y 148 427 662 740 638 460 200 80 方案B i x 510 487 454 380 205 84 23 192 表1.2 自动喂料搅拌机运动分析数据表 方案号 固定铰链A 、D 位置 电动机转 速 /(r/min) 容器转速/(r/min) 每次 搅拌 时间 /s 物料装入容器时间 /s A x /mm A y /mm D x /mm D y /mm
A 1700 400 1200 0 1440 70 60 40 B 1725 405 1200 0 1440 65 80 50 二、功能要求 1)功能要求 a、要求物料的搅拌动作为:电动机通过减速装置带动容器饶垂直轴缓慢整周转动:同时固定连在容器内拌匀将容器中拌料均匀搅动。 b、要求喂料动作为:物料呈粉状和颗粒状定时从漏斗中漏出,输出持续一段时间后漏斗自动关闭。 c、喂料机的开启、关闭动作和搅拌机同步。 2)功能分解 为满足设计要求需要实现下列运动功能: a、电动机带动下容器绕垂直轴缓慢整周运动。 b、在电动机带动下拌勺沿搅拌数据要求的轨迹搅拌 c、在电动机带动下实现填料机自动填料的功能,即使漏斗出料口开关左右移动。 d、通过不同的机构、轮系的特点达到课题任务的减速要求和各部位运转的时间要求。 三、机构运动循环图 循环图1:拌匀的轨迹方案 : 搅拌勺不搅拌搅拌 容器匀速转动 喂料口开启40s 关闭60s φ140°220°