时间序列模型识别
1采用ACF、PACF识别
1.1MA(1)模型
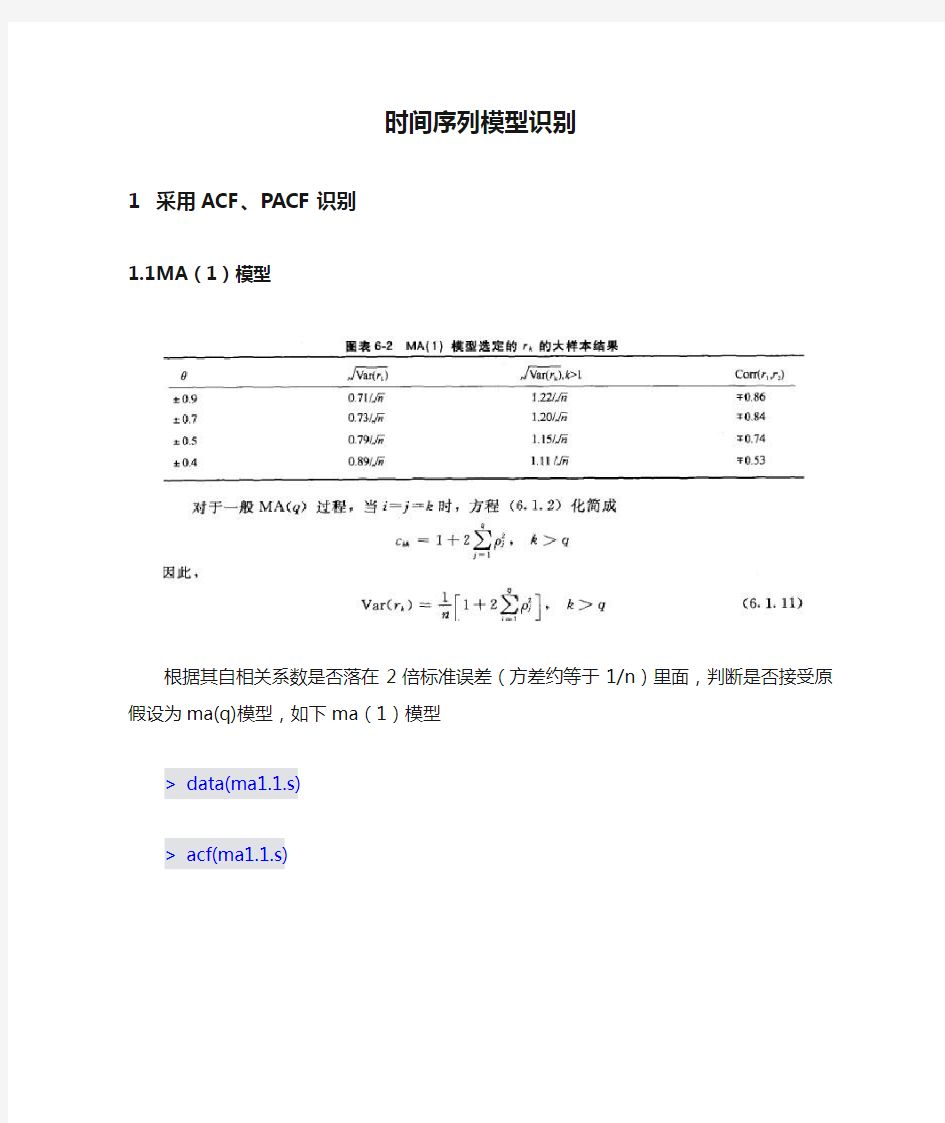
根据其自相关系数是否落在2倍标准误差(方差约等于1/n)里面,判断是否接受原假设为ma(q)模型,如下ma(1)模型
> data(ma1.1.s)
> acf(ma1.1.s)
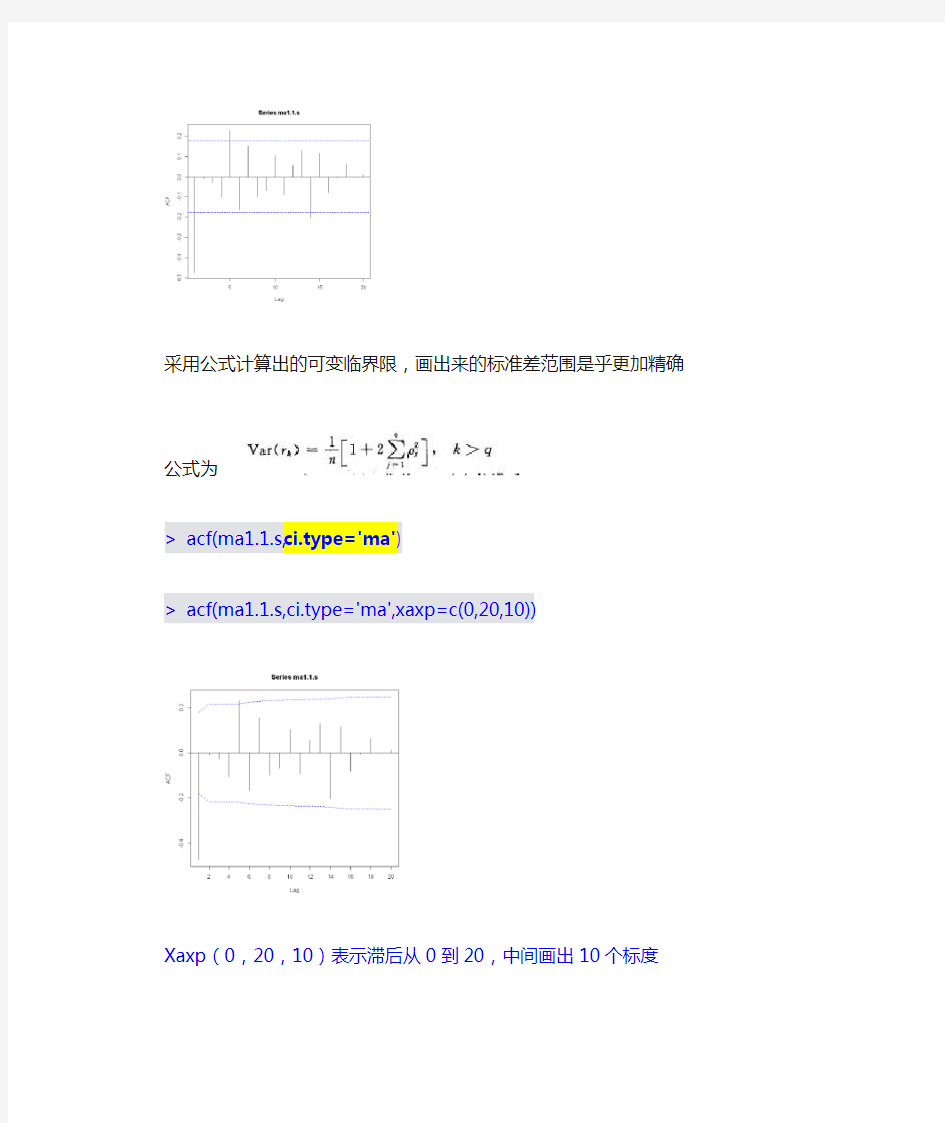
采用公式计算出的可变临界限,画出来的标准差范围是乎更加精确
公式为
> acf(ma1.1.s,ci.type='ma')
> acf(ma1.1.s,ci.type='ma',xaxp=c(0,20,10))
Xaxp(0,20,10)表示滞后从0到20,中间画出10个标度
若ACF中有明显衰减的正弦波趋势也应该考虑下AR模型,用PACF做进一步的检验。
1.2AR(1)模型
> data(ar1.s)
> acf(ar1.s,xaxp=c(0,20,10))
其自相关系数趋近于线性递减,一般对于AR模型应采用计算pacf
若ACF中有明显衰减的正弦波趋势也应该考虑下AR模型,用PACF做进一步的检验。
> pacf(ar1.s,xaxp=c(0,20,10))
由图可知其偏相关系数在一阶时非常的明显,也再一次验证了其是一阶自相关过程。
1.3ARMA(1,1)
> plot(arma11.s)
> acf(arma11.s,xaxp=c(0,20,10))
> pacf(arma11.s,xaxp=c(0,20,10))
从acf和pacf可以看出模型建议为arma(1,1)
1.4非平稳模型ARIMA
> data(oil.price)
> acf(as.vector(oil.price))
> pacf(as.vector(oil.price))
一阶差分后的相关系数
> acf(diff(as.vector(log(oil.price))))
2EACF方法
ACF和PACF为识别纯MA和AR提供了有效的工具,但是对于混合模型则力不从心,扩展的自相关函数eacf可以帮助我们识别混合模型
> eacf(arma11.s)
AR/MA
0 1 2 3 4 5 6 7 8 9 10 11 12 13
0 x x x x o o o o o o o o o o
1 x o o o o o o o o o o o o o
2 x o o o o o o o o o o o o o
3 x x o o o o o o o o o o o o
4 x o x o o o o o o o o o o o
5 x o o o o o o o o o o o o o
6 x o o o x o o o o o o o o o
7 x o o o x o o o o o o o o o
如对于arma11数据集来说,演示结果表明arma(1,1)或者arma(2,1)是可取的
> eacf(ar1.s)
AR/MA
0 1 2 3 4 5 6 7 8 9 10 11 12 13
0 x x x x x x o o o o o o o o
1 o o o o o o o o o o o o o o
2 o o o o o o o o o o o o o o
3 x o o o o o o o o o o o o o
4 x o o o o o o o o o o o o o
5 x x o o o o o o o o o o o o
6 x o x o o o o o o o o o o o
7 x o x o o o o o o o o o o o
> eacf(ma1.1.s)
AR/MA
0 1 2 3 4 5 6 7 8 9 10 11 12 13
0 x o o o x o o o o o o o o x
1 x o o o o o o o o o o o o o
2 x o o o o o o o o o o o o o
3 x x x x o o o o o o o o o o
4 x x o x x o o o o o o o o o
5 x x o o x x o o o o o o o o
6 o o x x x x o o o o o o o o
7 o o x o o x o o o o o o o o
如何看eacf图:找出图中全为零的三角区域,从x部分开始构建,构建成的三角尖即为可行模型(找到点后对着行列的标值可分别找到AR和MA的建议阶数)
3Armasubset基于BIC对最优子集ARMA的选择
> res=armasubsets(arma11.s,nar=3,nma=3)
> plot(res)
在用armasubsets时如果设置的nar和nma不合理,则会出错提示,In leaps.setup(x, y, wt = wt, nbest = nbest, nvmax = nvmax, force.in = force.in, :
1linear dependencies found
因为过分的差分后可能出现0值。
此时要将其设置得更小
从图可以看出:根据最小BIC准则,较好的模型有较小的BIC,因为图中的BIC 为负数所以先取第一行,第一行中阴影包括了前部分的1阶滞后项,而后部分无阴影即无误差项(前部分是对应AR,而后一部分对应MA)。随后看第二行,由于BIC的值相差不大,二行中显示2阶滞后自回归和1阶滞后误差是比较显著的同理可得第三行。最后综合分析图表可以得出ARMA(1,1)模型有其一定的合理性。
应用时间序列分析实验报告
单位根检验输出结果如下:序列x的单位根检验结果:
1967 58.8 53.4 1968 57.6 50.9 1969 59.8 47.2 1970 56.8 56.1 1971 68.5 52.4 1972 82.9 64.0 1973 116.9 103.6 1974 139.4 152.8 1975 143.0 147.4 1976 134.8 129.3 1977 139.7 132.8 1978 167.6 187.4 1979 211.7 242.9 1980 271.2 298.8 1981 367.6 367.7 1982 413.8 357.5 1983 438.3 421.8 1984 580.5 620.5 1985 808.9 1257.8 1986 1082.1 1498.3 1987 1470.0 1614.2 1988 1766.7 2055.1 1989 1956.0 2199.9 1990 2985.8 2574.3 1991 3827.1 3398.7 1992 4676.3 4443.3 1993 5284.8 5986.2 1994 10421.8 9960.1 1995 12451.8 11048.1 1996 12576.4 11557.4 1997 15160.7 11806.5 1998 15223.6 11626.1 1999 16159.8 13736.5 2000 20634.4 18638.8 2001 22024.4 20159.2 2002 26947.9 24430.3 2003 36287.9 34195.6 2004 49103.3 46435.8 2005 62648.1 54273.7 2006 77594.6 63376.9 2007 93455.6 73284.6 2008 100394.9 79526.5 run; proc gplot; plot x*t=1 y*t=2/overlay; symbol1c=black i=join v=none; symbol2c=red i=join v=none w=2l=2; run; proc arima data=example6_4; identify var=x stationarity=(adf=1); identify var=y stationarity=(adf=1); run; proc arima; identify var=y crrosscorr=x; estimate methed=ml input=x plot; forecast lead=0id=t out=out; proc aima data=out; identify varresidual stationarity=(adf=2); run;
手拉手模型 【课堂导入】 什么是手拉手相似基本图形?与手拉手全等的基本图形类似,手拉手相似要比手拉手全等更具有一般性。 在上面右侧的四个图形中,每一个图形中都存在两对相似三角形,△ADE∽△ABC, △ADB∽△AEC,这两对相似三角形是可以彼此转化的。
【例1】已知:△ABC,△DEF 都是等边三角形,M 是 BC 与 EF 的中点,连接 AD,BE. (1)如图1,当EF 与BC 在同一条直线上时,直接写出 AD 与BE 的数量关系和位置关系; (2)△ABC 固定不动,将图1 中的△DEF 绕点M 顺时针旋转(0o≤≤90o)角,如图2 所示,判断(1)中的结论是否仍然成立,若成立,请加以证明;若不成立,说明理由; 【例2】以平面上一点O 为直角顶点,分别画出两个直角三角形,记作△AOB 和△COD,其中∠ABO=∠DCO=30°.点E、F、M 分别是AC、CD、DB 的中点,连接FM、EM. ①如图 1,当点D、C 分别在 AO、BO 的延长线上时 F M E M ②如图2,将图1 中的△AOB 绕点O 沿顺时针方向旋转60度角,其 他条件不变,判断 F M的值是否发生变化,并对你的结论进行证明; E M
【例3】如图 1,在△ABC 中,∠ACB=90°,BC=2,∠A=30°,点 E,F 分别是线段 BC, AF=_______. AC 的中点,连结 EF.(1)线段B E 与A F 的位置关系是_______, BE (1)中的结论是(2)如图2,当△CEF 绕点C顺时针旋转α时(0°<α<180°) ,连结A F,BE, 否仍然成立.如果成立,请证明;如果不成立,请说明理由. 【例4】如图 1,在四边形 ABCD 中,点E、F 分别是AB、CD 的中点,过点E 作AB 的垂 线,过点F 作CD 的垂线,两垂线交于点G,连接AG、BG、CG、DG,且∠AGD=∠BGC. (1)求证:AD=BC. (2)求证:△AGD∽△EGF. (3)如图2,若AD、BC 所在直线互相垂直,求E F A D的值.
1、在直线ABC的同一侧作两个等边三角形△ABD和△BCE,连接AE与CD,证明: △ABE≌△DBC,AE=DC,AE与DC的夹角为60?,△AGB≌△DFB,△EGB≌△CFB, BH平分∠AHC,GF∥AC 2、如果两个等边三角形△ABD和△BCE,连接AE与CD,直线AE与CD相交于点H,求证:(1)AE=DC;(2)AE与DC的夹角为60?;(3)BH平分∠AHC. 3、如图,两个正方形ABCD和DEFG,连接AG与CE,二者相交于H,求证: (1)AG=CE;(2)AG与CE之间的夹角为90度;(3)HD平分∠AHE.
4.将等腰Rt△ABC和等腰Rt△ADE按图①方式放置,∠A=90°,AD边与AB边重合,AB=2AD=4。 将△ADE绕点A逆时针方向旋转一个角度α(0°<α>180°),BD的延长线交CE于P。(1)如图②,证明:BD=CE,BD⊥CE; (2)如图③,在旋转的过程中,当AD⊥BD时,求出CP的长。 ,PB=4,以AB为直角边作等腰直角三角形ABD,且P、D两点在直线AB 5、已知:PA (1)如图,当∠APB=45°时,求AB及PD的长; (2)当∠APB变化,且其它条件不变时,求PD的最大值及相应∠APB的大小.
1、如图,已知△ABC的面积是3的等边三角形,△ABC∽△ADE,AB=2AD,∠BAD=45°,AC 与DE相交于点F,则△AEF的面积等于__________(结果保留根号). 2、在△ABC中,AB=AC,∠BAC=2∠DAE=2α. (1)如图1,若点D关于直线AE的对称点为F,求证:△ADF∽△ABC; (2)如图2,在(1)的条件下,若α=45°,求证:DE2=BD2+CE2; (3)如图3,若α=45°,点E在BC的延长线上,则等式DE2=BD2+CE2还能成立吗?请说明理由.
第五章时间序列的模型识别 前面四章我们讨论了时间序列的平稳性问题、可逆性问题,关于线性平稳时间序列模型,引入了自相关系数和偏自相关系数,由此得到ARMA(p, q)统计特性。从本章开始,我们将运用数据开始进行时间序列的建模工作,其工作流程如下: 图5.1 建立时间序列模型流程图 在ARMA(p,q)的建模过程中,对于阶数(p,q)的确定,是建模中比较重要的步骤,也是比较困难的。需要说明的是,模型的识别和估计过程必然会交叉,所以,我们可以先估计一个比我们希望找到的阶数更高的模型,然后决定哪些方面可能被简化。在这里我们使用估计过程去完成一部分模型识别,但是这样得到的模型识别必然是不精确的,而且在模型识别阶段对于有关问题没有精确的公式可以利用,初步识别可以我们提供有关模型类型的试探性的考虑。 对于线性平稳时间序列模型来说,模型的识别问题就是确定ARMA(p,q)过程的阶数,从而判定模型的具体类别,为我们下一步进行模型的参数估计做准备。所采用的基本方法主要是依据样本的自相关系数(ACF)和偏自相关系数(PACF)初步判定其阶数,如果利用这种方法无法明确判定模型的类别,就需要借助诸如AIC、BIC 等信息准则。我们分别给出几种定阶方法,它们分别是(1)利用时间序列的相关特性,这是识别模型的基本理论依据。如果样本的自相关系数(ACF)在滞后q+1阶时突然截断,即在q处截尾,那么我们可以判定该序列为MA(q)序列。同样的道理,如果样本的偏自相关系数(PACF)在p处截尾,那么我们可以判定该序列为AR(p)序列。如果ACF和PACF 都不截尾,只是按指数衰减为零,则应判定该序列为ARMA(p,q)序列,此时阶次尚需作进一步的判断;(2)利用数理统计方法检验高阶模型新增加的参数是否近似为零,根据模型参数的置信区间是否含零来
射频识别技术 Radio Frequency Identification Technology 一、概述 射频识别技术(Radio Frequency Identification,缩写RFID),射频识别技术是20世纪90年代开始兴起的一种自动识别技术,射频识别技术是一项利用射频信号通过空间耦合(交变磁场或电磁场)实现无接触信息传递并通过所传递的信息达到识别目的的技术。 从信息传递的基本原理来说,射频识别技术在低频段基于变压器耦合模型(初级与次级之间的能量传递及信号传递),在高频段基于雷达探测目标的空间耦合模型(雷达发射电磁波信号碰到目标后携带目标信息返回雷达接收机)。1948年哈里斯托克曼发表的"利用反射功率的通信"奠定了射频识别射频识别技术的理论基础。 二、射频识别技术的发展 1940-1950年:雷达的改进和应用催生了射频识别技术,1948年奠定了射频识别技术的理论基础。 1950-1960年:早期射频识别技术的探索阶段,主要处于实验室实验研究。 1960-1970年:射频识别技术的理论得到了发展,开始了一些应用尝试。 1970-1980年:射频识别技术与产品研发处于一个大发展时期,各种射频识别技术测试得到加速。出现了一些最早的射频识别应用。 1980-1990年:射频识别技术及产品进入商业应用阶段,各种规模应用开始出现。 1990-2000年:射频识别技术标准化问题日趋得到重视,射频识别产品得到广泛采用,射频识别产品逐渐成为人们生活中的一部分。 2000年后:标准化问题日趋为人们所重视,射频识别产品种类更加丰富,有源电子标签、无源电子标签及半无源电子标签均得到发展,电子标签成本不断降低,规模应用行业扩大。 至今,射频识别技术的理论得到丰富和完善。单芯片电子标签、多电子标签识读、无线可读可写、无源电子标签的远距离识别、适应高速移动物体的射频识别技术与产品正在成为现实并走向应用。 三、RFID工作频率指南和典型应用 不同频段的RFID产品会有不同的特性,下面详细介绍无源的感应器在不同工作频率产品的特性以及主要的应用。 目前定义RFID产品的工作频率有低频、高频和超高频的频率范围内的符合不同标准的不同的产品,而且不同频段的RFID产品会有不同的特性。其中感应器有无源和有源两种方式,下面详细介绍无源的感应器在不同工作频率产品的特性以及主要的应用。 (一)、低频(从125KHz到134KHz)
-0.8 -0.6-0.4-0.20.00.20.40.60.82 4 6 8 10 12 14 -0.8 -0.6-0.4-0.20.0 0.20.40.60.82 4 6 8 10 12 14 第四章 平稳时间序列模型的建立 本章讨论平稳时间序列的建模问题,也就是从观测到的有限样本数据出发,通过模型的识别、模型的定阶、参数估计和诊断校验等步骤,建立起适合的序列模型。学习重点为模型的识别和模型的检验。 第一节 模型识别 一、 识别依据 模型识别主要是依据SACF 和SPACF 的拖尾性与截尾性来完成。常见的一些ARMA 类型的SACF 和SPACF 的统计特征在下表中列出,可供建模时,进行对照选择。 表 ARIMA 过程与其自相关函数偏自相关函数特征 模 型 自相关函数特征 偏自相关函数特征 ARIMA(1,1,1) ? x t = ?1? x t -1 + u t + θ1u t -1 缓慢地线性衰减 AR (1) x t = ?1 x t -1 + u t 若?1 > 0,平滑地指数衰减 若?1 < 0,正负交替地指数衰减 -0.8 -0.6-0.4-0.20.00.20.40.60.82 4 6 8 10 12 14 若?11 > 0,k =1时有正峰值然后截尾 若?11 < 0,k =1时有负峰值然后截尾 -0.8 -0.6-0.4-0.20.00.20.40.60.82 4 6 8 10 12 14 MA (1) x t = u t + θ1 u t -1 若θ1 > 0,k =1时有正峰值然后截尾 若θ1 > 0,交替式指数衰减 -1.0 -0.5 0.0 0.5 1.02 4 6 8 10 12 14 -1.0 -0.5 0.0 0.5 1.0 2 4 6 8 10 12 14
手拉手模型 1、等边三角形 条件:△OAB,△OCD均为等边三角形 结论:;;导角核心:八字导角 2、等腰直角三角形 条件:△OAB,△OCD均为等腰直角三角形结论:;;导角核心:
3、任意等腰三角形 条件:△OAB,△OCD均为等腰三角形,且∠AOB = ∠COD 结论:;; 核心图形: 核心条件:;; 例题讲解: A类 1:在直线ABC的同一侧作两个等边三角形△ABD和△BCE,连接AE与CD, 等边三角形要得到哪些结论? 要联想到什么模型?
证明:(1)△ABE≌△DBC; (2)AE=DC; (3)AE与DC的夹角为60°; (4)△AGB≌△DFB; (5)△EGB≌△CFB; (6)BH平分∠AHC; 解题思路: 1:出现共顶点的等边三角形,联想手拉手模型 2:利用边角边证明全等; 3:八字导角得角相等; 2:如图两个等腰直角三角形ADC与EDG,连接AG,CE,二者相交于H. 等腰直角三角形要得到哪些结论? 要联想到什么模型? 问 (1)△ADG≌△CDE是否成立? (2)AG是否与CE相等? (3)AG与CE之间的夹角为多少度? (4)HD是否平分∠AHE?
解题思路: 1:出现共顶点的等腰直角三角形,联想手拉手模型 2:利用边角边证明全等; 3:八字导角得角相等; 3:如图,分别以△ABC 的边AB、AC同时向外作等腰直角三角形,其中AB =AE,AC =AD, 等腰直角三角形要得到哪些结论? 要联想到什么模型? ∠BAE=∠CAD=90°,点G为BC中点,点F为BE 中点,点H 为CD中点。探索GF与 多个中点,一般考虑什么? GH 的位置及数量关系并说明理由。
射频识别(RFID)系统架构和持续改善 陈 柯 邵 晖 何婷婷上海聚星仪器有限公司 1 引 言 物联网作为新一代信息技术的重要组成部分,囊括了射频识别技术、传感器技术、智能化网络、云计算等前沿技术,其中射频识别(RFID)作为物联网感知层最重要的关键技术,一直以来都是物联网发展过程中获得广泛关注的领域。在射频识别技术 体系下的若干频段和标准中,超高频EPC Gen2标准无疑又是其中最具有代表性的案例。自2004年第一版EPC Gen2标准诞生以来,到2014年已经走过了射频识别技术快速发展和融合的十年发展历程,聚星也有幸见证和参与了这个历程,做出了自己的贡献。 图1 聚星RFID发展历程 2 定制构架 聚星涉足射频识别领域最早是在2005年,当时E P C G e n 2标准发布不久,全球相关芯片厂商都在积极研发新产品以支持最新的国际标准。大家所面临的共同问题是,由于这是一个全新的通信标准,并且其中设计了μs 级的实时通信时序,业界没有任何现成的解决方案可以支持新产品的研发和生产测 试。如果选择传统仪器搭建测试系统,会存在功能受限,测试不全面的问题,如果选择自行研发测试系统,又会存在投入高、周期长、非专业等问题。在这样的市场形势下,聚星应邀为美国某知名厂商进行了EPC Gen2测试系统的定制化设计和研发。得益于聚星多年积累的完善架构,包括工程管理方法、硬件架构、软件架构、校准和测 试方法等,该项目得以快速高效的完成,并在RFID Journal主办的RFID World 2006大会上正式发布,随后成功部署到该用户位于全球不同区域的多家实验室中。 随着射频识别技术浪潮的推进,聚星和日本多家知名厂商进行了针对R F I D 测试的深入交流。通过对用户需求的汇总和详细分析,聚星RFID系统构架在硬件上采用了当时最为先进的基于FPGA的软件无线电平台,软件上采用了分层次的模块化设计,充分考虑到了实时通信时序要求、多标准多协议、产品的可 扩展性和可升级性等问题。事实也证明,完善的系统构架对于延长产 品本身的生命周期,以及保护用户投资和提升用户体验都起到了至关重要的作用。同年,聚星RFID系统构架上增加了对ISO 18000-3和ISO 18000-6标准的支持,《采用模块化仪器构建业界领先的RFID测试系统》发表于虚拟仪器技术应用方案论文集。
时间序列模型的构建和预测 Box Jenkins Methodology) 步骤1:识别。观察相关图和偏相关图 步骤2:估计。估计模型中所包含的自回归系数和移动平均系数,可以用OLS 来估计 步骤3:诊断检验。选一个最适合数据的模型,检查从这模型中估计到的残差是否白噪声,如果不是的话,我们必须从头来过 步骤 4 :预测。在很多情况下,这种方法得到的预测结果要比其它计量模型得到的要准确 识别 检查时间序列是否平稳 - 如果自相关函数衰退的很慢,则序列可能是非平稳 - 如果时间序列为一非平稳过程,应该运用差分的形式使它变为平稳过程 - 在检验了一个时间序列的平稳性之后,我们应该用相
关图和偏相关图检验ARMA模型中的阶数p和q 模型 ARIMA(1,1,1) .■: x t = ■ 1. x t-1 + u t + ru t-1 自相关函数特征 缓慢地线性衰减 1.0 偏自相关函数特征 AR( 1) x t = -1 X t-1 + u t 右;1 > 0,平滑地指数衰减若-11 > 0,k=1时有正峰值然后截尾 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 2 - 4 6 - 8 10 12 ?14 MA ( 1) X t = U t + 71 U t- 1 AR( 2) x t = ;1 x t-1 + 2 X t-2 + u t 若;i < 0,正负交替地指数衰减 0.8 若71 > 0,k=1时有正峰值然后截尾 若71 < 0,k=1时有负峰值然后截尾 指数或正弦衰减 若-11 < 0,k=1时有负峰值然后截尾 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 若?冷> 0,交替式指数衰减 0.8 若3<0,负的平滑式指数衰减 k=1,2时有两个峰值然后截尾
手拉手模型 手拉手模型 特点:由两个顶角相等的等腰三角形所组成,并且顶角的顶点为公共顶点 结论:(1)△ABD ≌△AEC (2)∠α+∠BOC=180° (3)OA 平分∠BOC 变形: 例1.如图,B 是线段AC 上一点,分别以AB 和BC 为边长,在直线AC 的同一侧作两个等边三角形,△ABD 和△ECB ,连接AE 和CD ,AE 与DC 交于点H ,与BD 与BE 交于点G ,F . (1)求证:△B CD ≌△BEA ; (2)探究△BFG 的形状,并证明你的结论.
思考:的数量关系。与DC AE (2)AE 与DC 之间的夹角为? 60 (3)DFB AGB ??? (4)CFB EGB ??? (5)BH 平分AHC ∠ (6)AC GF // 变式精练1:如果两个等边三角形△ABD 和△BCE ,连接AE 与CD ,证明: (1)AE 与DC 的夹角为60°; (2)AE 与DC 的交点设为H ,BH 平分∠AHC . 思考:DC AE =;AE 与DC 之间的夹角为?60 试一试继续旋转结论是否成立。
变式精练2.以点A为顶点作等腰Rt△ABC,等腰Rt△ADE,其中∠BAC=∠DAE=90°,如图1所示放置,使得一直角边重合,连接BD、CE. (1)试判断BD、CE的数量关系,并说明理由; (2)延长BD交CE于点F,试求∠BFC的度数; (3)把两个等腰直角三角形按如图2放置,(1)中的结论是否仍成立?请说明理由. 练习:已知:如图①,在△AOB和△COD中,OA=OB,OC=OD,∠AOB=∠COD=50° (1)求证:①AC=BD;②∠APB=50°; (2)如图②,在△AOB和△COD中,OA=OB,OC=OD,∠AOB=∠COD=α,则AC与BD间的等量关系为,∠APB的大小为
无线射频识别技术(RFID)基础知识 无线射频识别技术的基本原理是利用空间电磁感应(Inductive Coupling)或者电磁传播(Propagation Coupling)来进行通信,以达到自动识别被标识物体的目的。基本工作方法是将无线射频识别标签(Tags)安装在被识别物体上(粘贴、插放、挂佩、植入等),当被标识物体进入无线射频识别系统阅读器(Readers)的阅读范围时,标签和阅读器之间进行非接触式信息通讯,标签向阅读器发送自身信息如ID号等,阅读器接收这些信息并进行解码,传输给后台处理计算机,完成整个信息处理过程。 无线射频识别技术是一本多门学科多种技术综合利用的应用技术。所涉及的关键技术大致包括:芯片技术、天线技术、无线通信技术、数据变换与编码技术、电磁场与微波技术等。 一、基本概念 无线射频识别技术(Radio Frequency Identification,RFID)是一种非接触的自动识别技术,其基本原理是利用射频信号的空间耦合(电磁感应或者电磁传播)传输特性,实现对被识别物体的自动识别。图1所示为RFID系统配置示意图。 图1 RFID系统配置示意图 电磁感应,即所谓的变压器模型,通过空间高频交变磁场实现耦合,依据的是电
磁感应定律,如图2所示。电磁感应方式一般适合于中、低频工作的近距离射频识别系统。典型的工作频率有:125KHz、225KHz和13.56MHz。识别作用距离小于1m,典型作用距离为10~20cm。 图2 电感耦合 电磁传播或者电磁反向散射(Back Scatter)耦合,即所谓的雷达原理模型,发射出去的电磁波,碰到目标后反射,同时携带回目标信息,依据的是电磁波的空间传播规律,如图3所示。电磁反向散射耦合方式一般适合于超高频、微波工作的远距离射频识别系统。典型的工作频率有:433MHz、915MHz、2.45GHz、5.8GHz。识别作用距离大于1m,典型作用距离为3~l0m。 图3 电磁耦合 射频识别系统一般由两个部分组成,即电子标签和阅读器。在RFID的实际应用中,电子标签附着在被识别的物体上(表面或者内部),当带有电子标签的被识别物品通过阅读器的可识读区域时,阅读器自动以无接触的方式将电子标签中的约定识别信息取出,从而实现自动识别物品或自动收集物品标识信息的功能。阅读器系统又包括阅读器和天线,有的阅读器是将天线和阅读器模块集成在一个设备单元中的,成为集成式阅读器(Integrated Reader)。 由上可见,为了完成RFID系统的主要功能,RFID系统具有两个基本的构成部
实验十时间序列模型 10.1 实验目的 掌握时间序列的基本理论,时间序列模型种类的识别、估计、诊断和预测方法,以及相应的EViews软件操作方法。 10.2 实验原理 时间序列分析方法由Box-Jenkins (1976) 年提出。它适用于各种领域的时间序列分析。 时间序列模型不同于经济计量模型的两个特点是: (1)这种建模方法不以经济理论为依据,而是依据变量自身的变化规律,利用外推机制描述时间序列的变化。 (2)明确考虑时间序列的非平稳性。如果时间序列非平稳,建立模型之前应先通过差分把它变换成平稳的时间序列,再考虑建模问题。 时间序列模型的应用: (1)研究时间序列本身的变化规律(建立何种结构模型,有无确定性趋势,有无单位根,有无季节性成分,估计参数)。 (2)在回归模型中的应用(预测回归模型中解释变量的值)。 (3)时间序列模型是非经典计量经济学的基础之一(不懂时间序列模型学不好非经典计量经济学)。 10.3 实验内容 建立中国人口时间序列模型。 表10.1给出了中国人口数据y t(1952-2004,单位万人),试建立y t的时间序列模型,并预测2005年中国人口总数。 表10.2
10.4 建模步骤 10.4.1 识别模型 利用表10.2数据建立y t序列图,如图10.20。 图10.20 中国人口序列(1952-2004) 从人口序列图可以看出我国人口总水平除在1960和1961两年出现回落外,其余年份基本上保持线性增长趋势。 察看序列的相关图,在序列窗口选择View/Correlogram,便会弹出如下窗口,见图10.21,选择滞后阶数(本例输入滞后期10),点击ok,得到如图10.22所示的序列y t的相关图和偏相关图。 图10.21 图10.22 y t的相关图,偏相关图 由y t的相关图,偏相关图判断y t为非平稳性序列。进一步考察其差分序列Dy t,序列图见图10.23,其相关图,偏相关图见图10.24。 图10.23 图10.24 Dy t的相关图,偏相关图 人口差分序列Dy t是平稳序列。应该用Dy t建立模型。因为Dy t均值非零,结合图2.14拟建立带有漂移项的AR(1)模型。 10.4.2 估计模型 采用AR(1)模型对Dy t进行估计,从EViews主菜单中点击Quick键,选择Estimate Equation功能。随即会弹出Equation specification对话框。输入漂移项非零的AR(1)模型估计命令(C表示漂移项)如下: D(Y) C AR(1) 结果如图10.25所示,整理如下: Dy t = 1374.097 + 0.6681 (Dy t-1– 1374.097) + v t
实验2:时间序列模型的识别、参数估计 实验目的: 1. 掌握时间序列的平稳性检验、纯随机性检验。 2. 能够利用自相关系数和偏自相关系数对时间序列模型进行识别。 3. 掌握参数估计的方法。 实验内容: 利用教材P151习题7.6所给的样本数据,在Eviews中实现下列内容:(1)画出时序图; (2)给出直至滞后48期的所有样本自相关系数和样本偏自相关系数;
(3)利用(2)的结果判断该序列的平稳性和纯随机性; 解:由(2)的序列分析结果:a、可以看出自相关系数(AC)始终在零周围波动,判定该序列为平稳时间序列;b、看Q统计量的P值:该统计量的原假设为X的1期,2期……k期的自相关系数均等于0,备择假设为自相关系数中至少有一个不等于0,因此如图知,该P值几乎都<5%的显著性水平,所以拒绝原假设,即序列不是纯随机序列(白噪声序列)。 (4)对该序列建立不同的模型,并进行比较,最后选择一个最优的模型; 解:观察(2)的图形,我们可以假设模型为MA(q)、AR(p)或ARMA(p,q)模型。 下面对每一个模型进行检验。 对MA(1):
如图所示:c对应的prob<0.05,故拒绝原假设,不能省去c。MA(1)对应的prob<0.05,故此模型有意义。AIC为0.3354.
对MA(2): MA(2)(p>0.05故此模型没有意义)。 如图所示:c对应的prob<0.05,故拒绝原假设,不能省去c;AR(1)对应的prob<0.05,故此模型有意义。AIC值为0.3092.
对AR(2): AR(2)对应的p>0.05故此模型没有意义。
时间序列分析法原理及步骤 ----目标变量随决策变量随时间序列变化系统 一、认识时间序列变动特征 认识时间序列所具有的变动特征, 以便在系统预测时选择采用不同的方法 1》随机性:均匀分布、无规则分布,可能符合某统计分布(用因变量的散点图和直方图及其包含的正态分布检验随机性, 大多服从正态分布 2》平稳性:样本序列的自相关函数在某一固定水平线附近摆动, 即方差和数学期望稳定为常数 识别序列特征可利用函数 ACF :其中是的 k 阶自 协方差,且 平稳过程的自相关系数和偏自相关系数都会以某种方式衰减趋于 0, 前者测度当前序列与先前序列之间简单和常规的相关程度, 后者是在控制其它先前序列的影响后,测度当前序列与某一先前序列之间的相关程度。实际上, 预测模型大都难以满足这些条件, 现实的经济、金融、商业等序列都是非稳定的,但通过数据处理可以变换为平稳的。 二、选择模型形式和参数检验 1》自回归 AR(p模型
模型意义仅通过时间序列变量的自身历史观测值来反映有关因素对预测目标的影响和作用,不受模型变量互相独立的假设条件约束,所构成的模型可以消除普通回归预测方法中由于自变量选择、多重共线性的比你更造成的困难用 PACF 函数判别 (从 p 阶开始的所有偏自相关系数均为 0 2》移动平均 MA(q模型 识别条件
平稳时间序列的偏相关系数和自相关系数均不截尾,但较快收敛到 0, 则该时间序列可能是 ARMA(p,q模型。实际问题中,多数要用此模型。因此建模解模的主要工作时求解 p,q 和φ、θ的值,检验和的值。 模型阶数 实际应用中 p,q 一般不超过 2. 3》自回归综合移动平均 ARIMA(p,d,q模型 模型含义 模型形式类似 ARMA(p,q模型, 但数据必须经过特殊处理。特别当线性时间序列非平稳时,不能直接利用 ARMA(p,q模型,但可以利用有限阶差分使非平稳时间序列平稳化,实际应用中 d (差分次数一般不超过 2. 模型识别 平稳时间序列的偏相关系数和自相关系数均不截尾,且缓慢衰减收敛,则该时间序列可能是 ARIMA(p,d,q模型。若时间序列存在周期性波动, 则可按时间周期进
手拉手模型 1.等边三角形 导角核心:八字导角 条件:△OAB ,△OCD 均为等边三角形 结论:①△OAC ≌△OBD ;②∠AEB = 60°;③OE 平分∠AED 2.等腰直角三角形 导角核心: 条件:△OAB ,△OCD 均为等腰直角三角形 结论:①△OAC ≌△OBD ;②∠AEB = 90°;③OE 平分∠AED 3.任意等腰三角形 核心图形:核心条件:OA=OB ;OC=OD ;∠AOB=∠COD 条件:△OAB ,△OCD 均为等腰三角形,且∠AOB = ∠COD 结论:①△OAC ≌△OBD ;②∠AEB=∠AOB ;③OE 平分∠AED 例题讲解: A 类 1.在直线ABC 的同一侧作两个等边三角形△ABD 和△BCE ,连接AE 与CD , 等边三角形要得到哪些结论? 要联想到什么模型?
证明:(1)△ABE ≌△DBC ; (2)AE=DC ; (3)AE 与DC 的夹角为60°; (4)△AGB ≌△DFB ; (5)△EGB ≌△CFB ; (6)BH 平分∠AHC ; 解题思路: 1.出现共顶点的等边三角形,联想手拉手模型 2.利用边角边证明全等; 3.八字导角得角相等; 2.如图两个等腰直角三角形ADC 与EDG ,连接AG 、CE ,二者相交于H. 问 (1)△ADG ≌△CDE 是否成立? (2)AG 是否与CE 相等? (3)AG 与CE 之间的夹角为多少度? (4)HD 是否平分∠AHE ? 解题思路: 1.出现共顶点的等腰直角三角形,联想手拉手模型 2.利用边角边证明全等; 3.八字导角得角相等; 3.如图,分别以△ABC 的边AB 、AC 同时向外作等腰直角三角形,其中 AB =AE ,AC =AD ,∠BAE =∠CAD=90°, 点G 为BC 中点,点F 为BE 中点,点H 为CD 中点。探索GF 与GH 的位置及数量关系并说明理由。 多个中点,一般考虑什么? 等腰直角三角形要得到哪些结论? 要联想到什么模型? 等腰直角三角形要得到哪些结论? 要联想到什么模型?
射频识别原理参考复习资料 第一部分填空提和选择题及答案 一、填空题 1、自动识别技术是应用一定的识别装置,通过被识别物品和识别装置之间的接近活动,自动地获取 被识别物品的相关信息,常见的自动识别技术有语音识别技术、图像识别技术、射频识别技术、条码识别技术(至少列出四种)。 2、RFID的英文缩写是Radio Frequency Identification。 3、RFID系统通常由电子标签、读写器和计算机通信网络三部分组成。 4、在RFID系统工作的信道中存在有三种事件模型: ①以能量提供为基础的事件模型 ②以时序方式提供数据交换的事件模型 ③以数据交换为目的的事件模型 5、时序指的是读写器和电子标签的工作次序。通常,电子标签有两种时序: TTF(Target Talk First),RTF(Reader Talk First)。 6、读写器和电子标签通过各自的天线构建了二者之间的非接触信息传输通道。根据观测点与天线之 间的距离由近及远可以将天线周围的场划分为三个区域:非辐射场区、辐射近场区、辐射远场区。 7、射频识别系统是由(信息载体)和信息获取装置组成的。其中信息载体是(射频标签),获取信息装置为(射频识读器)。 8、在RFID系统中,读写器与电子标签之间能量与数据的传递都是利用耦合元件实现的,RFID系统中的耦合方式有两种:电感耦合式、电磁反向散射耦合式。 9、读写器和电子标签之间的数据交换方式也可以划分为两种,分别是负载调制、反向散射调制。 10、按照射频识别系统的基本工作方式来划分,可以将射频识别系统分为全双工、半双工、时序系统。 11、读写器天线发射的电磁波是以球面波的形式向外空间传播,所以距离读写器R处的电子标签的 功率密度S为(读写器的发射功率为P Tx,读写器发射天线的增益为G Tx,电子标签与读写器之间的距离为R):S= (P Tx·G Tx)/(4πR2)。 12、按照读写器和电子标签之间的作用距离可以将射频识别系统划分为三类: 密耦合系统、远耦合系统、远距离系统。 13、典型的读写器终端一般由天线、射频模块、逻辑控制模块三部分构成。 14、控制系统和应用软件之间的数据交换主要通过读写器的接口来完成。一般读写器的I/O接口形式 主要有:USB、WLAN、以太网接口、RS-232串行接口、RS-485串行接口。 15、随着RFID技术的不断发展,越来越多的应用对RFID系统的读写器也提出了更高的要求,未来
第六节时间序列模型的建立与预测 ARIMA过程y t用 Φ (L) (Δd y t)= α+Θ(L) u t 表示,其中Φ (L)和Θ (L)分别是p, q阶的以L为变数的多项式,它们的根都在单位圆之外。α为Δd y t过程的漂移项,Δd y t表示对y t 进行d次差分之后可以表达为一个平稳的可逆的ARMA 过程。这是随机过程的一般表达式。它既包括了AR,MA 和ARMA过程,也包括了单整的AR,MA和ARMA过程。 可取 图建立时间序列模型程序图 建立时间序列模型通常包括三个步骤。(1)模型的识别,(2)模型参数的估计,(3)诊断与检验。
模型的识别就是通过对相关图的分析,初步确定适合于给定样本的ARIMA模型形式,即确定d, p, q的取值。 模型参数估计就是待初步确定模型形式后对模型参数进行估计。样本容量应该50以上。 诊断与检验就是以样本为基础检验拟合的模型,以求发现某些不妥之处。如果模型的某些参数估计值不能通过显著性检验,或者残差序列不能近似为一个白噪声过程,应返回第一步再次对模型进行识别。如果上述两个问题都不存在,就可接受所建立的模型。建摸过程用上图表示。下面对建摸过程做详细论述。 1、模型的识别 模型的识别主要依赖于对相关图与偏相关图的分析。在对经济时间序列进行分析之前,首先应对样本数据取对数,目的是消除数据中可能存在的异方差,然后分析其相关图。 识别的第1步是判断随机过程是否平稳。由前面知识可知,如果一个随机过程是平稳的,其特征方程的根都应在单位圆之外;如果 (L) = 0的根接近单位圆,自相关函数将衰减的很慢。所以在分析相关图时,如果发现其衰减很慢,即可认为该时间序列是非平稳的。这时应对该时间序列进行差分,同时分析差分序列的相关图以判断差分序列的平稳性,直至得到一个平稳的序列。对于经济时间序列,差分次数d通常只取0,1或2。 实际中也要防止过度差分。一般来说平稳序列差分得到的仍然是平稳序列,但当差分次数过多时存在两个缺点,(1)序列的样本容量减小;(2)方差变大;所以建模过程中要防止差分过度。对于一个序列,差分后若数据的极差变大,说明差分过度。 第2步是在平稳时间序列基础上识别ARMA模型阶数p, q。表1给出了不同ARMA模型的自相关函数和偏自相关函数。当然一个过程的自相关函数和偏自相关函数通常是未知的。用样本得到的只是估计的自相关函数和偏自相关函数,即相关图和偏相关图。建立ARMA模型,时间序列的相关图与偏相关图可为识别模型参数p, q提供信息。相关图和偏相关图(估计的自相关系数和偏自相关系数)通常比真实的自相关系数和偏自相关系数的方差要大,并表现为更高的自相关。实际中相关图,偏相关图的特征不会像自相关函数与偏自相关函数那样“规范”,所以应该善于从相关图,偏相关图中识别出模型的真实参数p, q。另外,估计的模型形式不是唯一的,所以在模型识别阶段应多选择几种模型形式,以供进一步选择。
无线射频识别(RFID)技术简介 本文介绍了无线射频识别(RFID)技术的工作原理、系统组成、发展史,给出了RFID自动识别术语解释以及RFID技术应用于各个领域所对应的频段及产品特点。 一、概述 RFID是射频识别技术的英文(Radio Frequency Identification)的缩写,射频识别技术是20世纪90年代开始兴起的一种自动识别技术,射频识别技术是一项利用射频信号通过空间耦合(交变磁场或电磁场)实现无接触信息传递并通过所传递的信息达到识别目的的技术。 无线射频识别技术(RFID)已经成为一个很热门的话题。据业内人士预测,RFID技术市场将在未来五年内在新的产品与服务上带来30至100亿美金的商机,随之而来的还有服务器、资料储存系统、资料库程序、商业管理软件、顾问服务,以及其他电脑基础建设的庞大需求。或许这些预测过于乐观,但RFID将会成为未来的一个巨大市场是毫无疑问的。许多高科技公司正在加紧开发RFID专用的软件和硬件,这些公司包括英特尔、微软、甲骨文、SAP和SUN,而最近全球最大的零售商沃尔玛的一项"要求其前100家供应商在2005年1月之前向其配送中心发送货盘和包装箱时使用RFID技术,2006年1月前在单件商品中使用这项技术"的决议,把RFID再次推到了聚光灯下。因此可以说无线射频识别技术(RFID)正在成为全球热门新科技。 二、射频识别技术发展历史 从信息传递的基本原理来说,射频识别技术在低频段基于变压器耦合模型(初级与次级之间的能量传递及信号传递),在高频段基于雷达探测目标的空间耦合模型(雷达发射电磁波信号碰到目标后携带目标信息返回雷达接收机)。1948年哈里斯托克曼发表的"利用反射功率的通信"奠定了射频识别射频识别技术的理论基础。 射频识别技术的发展可按十年期划分如下: 1940-1950年:雷达的改进和应用催生了射频识别技术,1948年奠定了射频识别技术的理论基础。 1950-1960年:早期射频识别技术的探索阶段,主要处于实验室实验研究。 1960-1970年:射频识别技术的理论得到了发展,开始了一些应用尝试。 1970-1980年:射频识别技术与产品研发处于一个大发展时期,各种射频识别技术测试得到加速。出现了一些最早的射频识别应用。 1980-1990年:射频识别技术及产品进入商业应用阶段,各种规模应用开始出现。 1990-2000年:射频识别技术标准化问题日趋得到重视,射频识别产品得到广泛采用,射频识别产品逐渐成为人们生活中的一部分。
基于Excel的时间序列预测与分析 1 时序分析方法简介 1.1时间序列相关概念 1.1.1 时间序列的内涵以及组成因素 所谓时间序列就是将某一指标在不同时间上的不同数值,按照时间的先后顺序排列而成的数列。如经济领域中每年的产值、国民收入、商品在市场上的销量、股票数据的变化情况等,社会领域中某一地区的人口数、医院患者人数、铁路客流量等,自然领域的太阳黑子数、月降水量、河流流量等等,都形成了一个时间序列。人们希望通过对这些时间序列的分析,从中发现和揭示现象的发展变化规律,或从动态的角度描述某一现象和其他现象之间的内在数量关系及其变化规律,从而尽可能多的从中提取出所需要的准确信息,并将这些知识和信息用于预测,以掌握和控制未来行为。 时间序列的变化受许多因素的影响 ,有些起着长期的、决定性的作用 ,使其呈现出某种趋势和一定的规律性;有些则起着短期的、非决定性的作用,使其呈现出某种不规则性。在分析时间序列的变动规律时,事实上不可能对每个影响因素都一一划分开来,分别去作精确分析。但我们能将众多影响因素,按照对现象变化影响的类型,划分成若干时间序列的构成因素,然后对这几类构成要素分别进行分析,以揭示时间序列的变动规律性。影响时间序列的构成因素可归纳为以下四种: (1)趋势性(Trend),指现象随时间推移朝着一定方向呈现出持续渐进地上升、下降或平稳的变化或移动。这一变化通常是许多长期因素的结果。 (2)周期性(Cyclic),指时间序列表现为循环于趋势线上方和下方的点序列并持续一年以上的有规则变动。这种因素是因经济多年的周期性变动产生的。比如,高速通货膨胀时期后面紧接的温和通货膨胀时期将会使许多时间序列表现为交替地出现于一条总体递增 地趋势线上下方。 (3)季节性变化(Seasonal variation),指现象受季节性影响 ,按一固定周期呈现出的周期波动变化。尽管我们通常将一个时间序列中的季节变化认为是以1年为期的,但是季节因素还可以被用于表示时间长度小于1年的有规则重复形态。比如,每日交通量数据表现出为期1天的“季节性”变化,即高峰期到达高峰水平,而一天的其他时期车流量较小,从午夜到次日清晨最小。
中考专题复习——几何题用旋转构造“手拉手”模型 一、教学目标: 1.了解并熟悉“手拉手模型”,归纳掌握其基本特征. 2.借助“手拉手模型”,利用旋转构造全等解决相关问题. 3.举一反三,解决求定值,定角,最值等一类问题. 二、教学重难点: 1.挖掘和构造“手拉手模型”,学会用旋转构造全等. 2.用旋转构造全等的解题方法最优化选择. 三、教学过程: 1.复习旧知 师:如图,△ABD,△BCE为等边三角形,从中你能得出哪些结论 生:(1)△ABE≌△DBC(2)△ABG≌△DBF (3)△CFB≌△EGB(4)△BFG为等边三角形 (5)△AGB∽△DGH(6)∠DHA=60°(7)H,G,F,B四点共圆(8)BH平分∠AHC……师:我们再来重点研究△ABE与△DBC,这两个全等的三角形除了对应边相等,对应角相等外,还有什么共同特征呢 生:它们有同一个字母B,即同一个顶点B. 师:我们也可以把△DBC看作由△ABE经过怎样的图形运动得到 生:绕点B顺时针旋转60°得到. 2.引入新课 师:其实我们可以给这两个全等的三角形赋予一个模型,叫“手拉手模型”,谁可以将这个模型的特征再做进一步的简化归纳呢 生:对应边相等. 师:我们可以称之为“等线段”. 生:有同一个顶点. 师:我们可以称之为“共顶点”. 师:等线段,共顶点的两个全等三角形,我们一般可以考虑哪一种图形运动 生:旋转. 师:“手拉手模型”可以归纳为:等线段,共顶点,一般用旋转. 3.小题热身
图12图3 1.如图1,△BAD中,∠BAD=45°,AB=AD,AE⊥BD于E,BC⊥AD于C,则AF=____BE. 2.如图2,△ABC和△BED均为等边三角形,ADE三点共线,若BE=2,CE=4,则AE=______. 3.如图3,正方形ABCD中,∠EAF=45°,BE=3,DF=5,则EF=_______. 师:我们来看第1,第2题,这里面有“手拉手模型”吗请你找出其中的“等线段,共顶点”. 生:题1中,等线段是AC,BC,共顶点是C,△ACF绕点C逆时针旋转90°得△BCD. 题2中,等线段是AB,BC,共顶点是B,△ABD绕点D顺时针旋转60°得△CBE.师:我们再来看第3题,这里有“手拉手模型”吗 生:没有. 师:那其中有没有“等线段,共顶点”呢 生:等线段是AD,AB,共顶点是A. 师:我们可否利用旋转来构造“手拉手模型”呢 生:将AE旋转,绕点A逆时针旋转90°. 师:为什么是逆时针旋转90°,你是如何思考的 生:我准备构造一个和△ABE全等的三角形,AB绕点A逆时针旋转90°即为AD,那么将AE逆时 针旋转90°可得AG,连接GD,证明全等. 师:说的不错,谁能再来归纳一下,借助“手拉手模型”,用旋转构造全等的方法吗 生:先找有没有“等线段,共顶点”,再找其中一条“共顶点”的线段,将其旋转. 师:旋转角度如何确定,方向怎么选择 生:选择其中一个三角形,将“共顶点”的线段旋转.旋转角为两条“等线段”间的夹角.方向 应与所选择的起始“等线段”旋转到另一条“等线段”时的方向一致. 师:非常棒,可以说,你已经掌握了这节课的精髓.但是,很多题目中只是隐含了“手拉手模型” 的一些条件,剩余的需要我们自己去构造,可以如何构造呢 步骤1:先找有没有“等线段,共顶点”. 步骤2:选择其中一个三角形,将其中经过“共顶点”的线段旋转. 步骤3:旋转方向与这个三角形的“等线段”旋转到另一条“等线段”的方向一致,旋转角为“等