附件1:
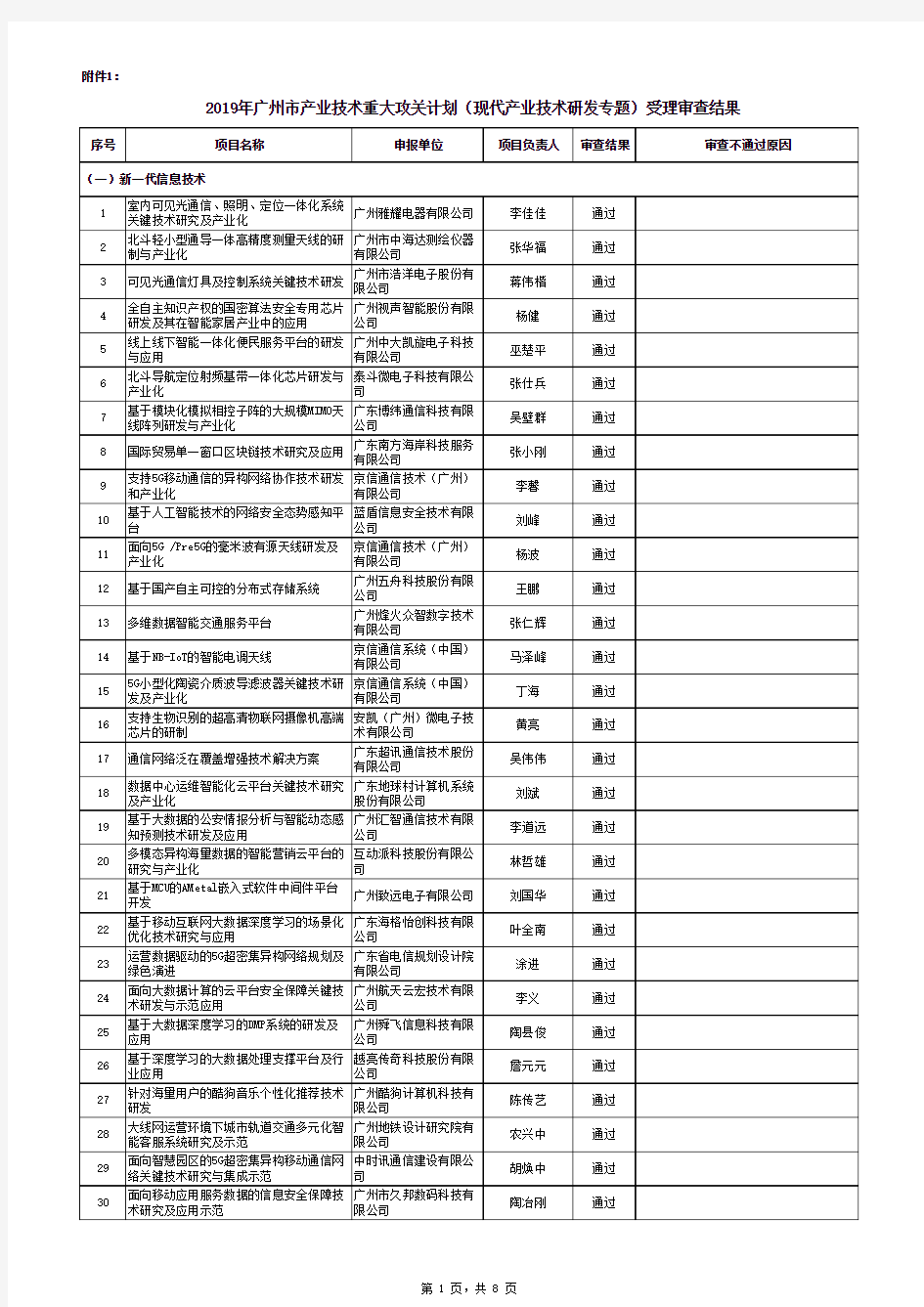
2019年广州市产业技术重大攻关计划(现代产业技术研发专题)受理审查结果
Indoor Positioning MethodsBased on Visible Light Communication Wang Yuqi1,2, Gong Yingkui1, Shi Zhengfa1,2, Li Yankun1, Zhang Ye1 1.Academy of OPTO-Electronics,Chinese Academy of Sciences,Beijing,China,100094 2.University of Chinese Academy of Sciences,Beijing,China,100049 1.wangyuqi12@https://www.doczj.com/doc/8d17863536.html,, 2.ykgong@https://www.doczj.com/doc/8d17863536.html, Abstract:As a new technology, the visible light communication using LED lights as the access points has many advantages such as without electromagnetic radiation, high bandwidth, high rate, etc.Itprovides a new possibility for indoor navigation and positioning. According to the current research progress and status, five kinds of positioning technologiesbased on visible light communication are analyzedand compared, then a new methodis proposed which combining visible light communication withphotogrammetry. Finally, the future of indoor positioning based on visible light communicationand its application is expounded. Keywords:LED; visible light communication; indoor positioning; photogrammetry 基于可见光通信的几种室内定位方法 王语琪1,2,巩应奎1,史政法1,2,李延坤1,张烨1 1.中国科学院光电研究院,北京,中国,100094 2.中国科学院大学,北京,中国,100049 1.wangyuqi12@https://www.doczj.com/doc/8d17863536.html,, 2.ykgong@https://www.doczj.com/doc/8d17863536.html, 【摘要】可见光通信作为一种新兴技术,具有无电磁辐射、高带宽、高速率等多种优点,其利用LED 灯为接入点,为室内定位技术提供了新的可能。本文综合国内外研究现状,对基于可见光通信的五种 定位技术进行分析和比较,并提出一种可见光通信与摄影测量结合的方法。最后对基于可见光通信的 室内定位技术的未来发展和应用前景进行展望。 【关键词】LED;可见光通信;室内定位;摄影测量 及图像传感器定位等技术。本文对以上五种定位技术 进行分析及比较,并提出一种新的可见光通信与摄影 测量相结合的定位方法。 1 引言 随着室内活动的日趋频繁,对于室内定位的需求 日益增多,同时对移动终端平台上基于位置的服务也 提出了更高的要求。GPS作为一种成熟的定位系 统,在户外开阔环境具有良好的用户体验和定位精 度,但由于卫星导航信号穿透建筑物墙壁后,信号 强度大幅度的衰减,加之室内多径现象严重,导致 GPS的定位精度大幅度下降,难以满足用户的室内 定位需求。目前主流的室内定位系统主要依赖红 外、超声波、超宽带、射频识别(无线局域网、 ZigBee)[1]技术等,由于使用的是射频信号,在空 中传播时易受干扰且在同一微波电路、同一方向上 不能使用同一频率,因此飞机、医院等特殊场景下 使用受限。可见光通信技术具有无电磁辐射、高带 宽、高速率、无需额外布设接入点等优点,为室内 定位方法提供了新的可能。 国内外对基于可见光通信的定位技术的研究工作 主要集中在五个方面,包括LED灯身份信息识别定 位 (LED-ID)、到达时间及时间差(TOA/TDOA)定位、 2 定位方案分析及比较 2.1LED-ID定位方法 基于LED-ID定位采用LED灯作为信标,每盏灯都 有一个固定ID。LED灯编码自身ID信息,可采用OOK (二进制启闭键控)的信号调制方式,不断向外发送 信息。定位过程如图1所示,首先控制中心为每盏LED 分配ID以示区别,在移动终端低速行进的过程中,利 用运动模糊及覆盖范围识别LED-ID,最后终端接收 后,根据LED通信信息中的ID信息,查询对应数据 库的三维坐标信息,通过映射的方式来确定终端的位 置。 Figure1LED-ID positioning process 图1LED-ID定位技术思路
基于能效的WLAN 室内定位系统模型设计与实现 摘要:基于能效的WLAN室内定位系统模型的设计目的,一方面是为了降低位置指纹数据库规模,另一方面为了减少服务器与客户端的数据传输量,同时减少相关的计算量。为了实现这个定位系统,笔者提出了AP预处理算法、聚类算法以及精定位AP选择算法。该文主要是分析如何设计基于能效的WLAN室内定位系统模型,以及如何实现这个系统的应用目的。 关键词:WLAN;室内;定位系统;模型设计 Abstract:Design model of WLAN indoor positioning system based on energy efficiency,on the one hand is to reduce the size of the location fingerprint database,on the other hand,in order to reduce the amount of data transmission of the server and the client,at the same time,reduce the amount of computation associated.In order to achieve this positioning system,experts have proposed a AP preprocessing algorithm,clustering algorithm and precision positioning AP selection algorithm.This paper is the analysis of how to design the WLAN indoor positioning system model based on energy efficiency,and how to realize the application of the system Key words: WLAN; interior; positioning system; model design 1 前言 由于无线局域网的迅速发展,基于WLAN的室内定位技术也越来越受到相关研究人员的关注。WLAN主要是通过检测无线接入点发射的信号强度判断用户的位置,而根据信号强度来进行定位的系统主要分为两种,其中一种基于传播模型的室内定位系统,另外一种是基于位置指纹算法的室内定位系统,在这两种室内定位系统中,前一种的限制条件比较多,后一种的优势比较突出。但是基于位置指纹算法的室内定位系统的实现需要解决数据库构造、离线采样数据预处理、定位AP的选择以及终端设备位置的估计,因此本文主要是针对这个问题,分析如何设计基于能效的WLAN室内定位系统模型,并加以实现。 2 关于基于能效的WLAN室内定位系统模型设计分析 2.1 定位系统模型整体设计 以往定位系统的能耗比较大,而能耗主要发生在两个点,其中一个点是服务器与客户端的数据交互,另外一个点是在位置估计中的计算。为了使定位系统能耗降低,就必须缩减数据库规模,减少服务器与客户端的信息传输量,同时还要在位置估计的计算过程中选用比较简单的计算方法。基于能效的WLAN室内定位系统模型主要包括两个阶段,一个是离线阶段,包括指纹采集、AP选择、数据库预处理以及聚类等四部分;另一个是在线阶段,包括测量值预处理、大概定位、AP选择以及精确定位等四部分。 2.2 定位系统模型设计特征
无线私人网络的室内定位系统的研究 援引:A Survey Of Indoor Positioning System For Wireless Personal Networks 摘要: 近来,室内定位系统(IPSs)被设计来为个人和设备提供位置信息。私人网络(PNs)被设计来满足用户的需求并且使用户的装备了不同交流软件且在不同地点的设备进行交流并组建一个网络。PNs中的位置可获取服务需要被发展来提供流畅且可获得的私人服务并且提高生活的质量。本篇论文给出了一个易于理解关于多个IPSs的调查。我们以一个PN中的用户的角度比较现存的IPSs和这些系统的大纲轮廓。 1.介绍 准确可靠且实时的室内定位和基于定位的协议和服务在未来通信网络中是不可或缺的。定位系统使得设备的位置信息对于导航,跟踪,监控之类的服务是可获得的。一些基于定位的室内追踪系统已经被应用于医院中的贵重设备上,以免设备被偷盗。 在迅速发展的综合网络和PNs的服务中极为强调用户的需求。人们很多的注意力被放在个人使用的智能情境感知服务上,这使得人们的行为举止更为方便简单。动态和室内环境的不断变化带来的不确定性被定位信息的实用性减小。GPS 是应用最为广泛的卫星定位系统。然而GPS不能在室内使用。相较于室外,室内环境更为复杂,室内有着各种干扰因素。例如气压,噪声,其他的的无线网络信号...... IR,RFID,WLAN,UWB基于这些基本技术,很多公司,大学发展出了很多新的技术。在这篇论文中,我们介绍了很多实用的和科研的IPSs。本篇论文给出了17个现存的17IPSs并且分成了6个标准。我们同样给出了他们各自优点和缺点。 2.个人网络室内定位系统的概述 这一节我们介绍了IPSs和私人网络PNs。我们强调为什么PNs需要位置信息以及现存的IPSs分类。提出了不同的评价标准来比较PNs中的用户需求。
每个五角星代表一个LED灯,共9个,分为3排,每排为3个LED灯且等均分布,建立xyz 坐标, 任意3个不共线的LED都可以对被测物体进行定位,取1、2、3号LED灯为例,1号LED灯坐标为(0,0,0),2号LED灯坐标为(2.5,0,0),3号LED灯坐标为(0,2.5,0), 三角形A、B为假设的被测物体,A点为1、2、3号LED灯构成的三角形的外心,综合来说是距所有距LED灯距离最近的点;B点为1号LED的对角点,距离最远 ①A点取至1、2、3号LED灯构成的三角形的外心,即A点到1、2、3号LED灯的距离都相等,为球半径√12.5,画图如下 ②B点为1号LED灯的斜对角,距离为√59,为大球半径,B点到2、3号LED灯距离均为√40.25,为另外两个球半径,画图如下 ① >>phi=0:pi/50:pi/2; >>theta=0:pi/50:2*pi; >> [pp,tt]=meshgrid(phi,theta); >> x=sin(pp).*cos(tt); >> y=sin(pp).*sin(tt); >> z=cos(pp); >> r=(12.5)^0.5; >>surf(r*x,r*y,r*z,'FaceColor','r'); >> hold on >> a=(12.5)^0.5; >>surf(a*x,2.5+a*y,a*z,'FaceColor','w'); >> hold on >> b=(12.5)^0.5; >>surf(2.5+b*x,b*y,b*z,'FaceColor','b'); >>view(45,75); 图中可以看出三个球相交于一点,坐标为(1.242,1.334,3.098)
B
20
A C
200-20
E
20-
D
题试计设竞赛国大学生电子 2017 年全
参赛注意事项
竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题;高)月日( 9 18:008 职 高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。 )参赛队认真 填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。(2 )参赛者必须是有正式 学籍的全日制在校本、专科学生,应出示能够证明参赛者学生(3 身份的有效证件(如学生证) 随时备查。 人,开赛后不得中途更换队员。3 (4)每队严格限制
)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设(5 计制 作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违 纪参赛队取消评 审资格。 ,由专人封存。 竞赛结束,上交设计报告、制作实物及《登记表》 日 20:00(6)8 月
12
题)I 可见光室内定位装置(
【本科组】
一、任务
所示。参赛者自 设计并制作可见光室内定位装置,其构成示意图如图 1 。)个 侧面 80cm×80cm 的立方空间(包含顶部、底部和 3 行搭建不小于 80cm× 控 制电路进 LED 3 个白光 LED,其位置和角度自行设置,由顶部平面放置
、、C,并分为 A、B 行控制和驱动;底部平面绘制纵横坐标线(间隔 5cm) 正 常照明(无明显闪烁)的 个 LED E 五个区域,如图 2 所示。要求在 3D、情 况下,测量电路根据传感器检测的信号判定传感器的位置。 控制电路 LED
LEDLED LED213
y (cm)
40 传感器 测量电路 LCD 底部平面坐标区域图 图 1 可见光室内定位装置示
意图 2 图 x40-40 (cm)I-1/3
-40
二、要求
.基本要求 1 区域,测量电路能正确区分其位于横坐标轴的上、 B、D(1) 传感器位于 下区域。 区域,测量电路能正确区分其位于纵坐标轴的左、 C、 E(2)传感器位于 右区域。 。10cm 区域,测量显示其位置坐标值,绝对误差 不大于 (3)传感器位于 A 区域,测量显示其位置坐标值,绝对误差不 D、E4) 传感器位于 B、C、( 。10cm 大于
。显示坐标值,显示分辨率为 0.1cm(5)测量电路 LCD .发挥部分 2 )传感器位于底部平面任意区域,测量显示其位置坐标值,绝对 误差不(1 。大于 3cm 控制电路可由键盘输入阿拉伯数字,在正常照明和定位 (误差满)LED (2 发 LED 3 个 (3)足基本要求或(4))的情况下,测量电路 能接收并显示 送的数字信息。 路音频信号源,在正常照明和定位的情况下,测
ULS(Ultimate Location System)室内定位系统介绍 随着数据业务和多媒体业务的快速增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端或其持有者、设施与物品在室内的位置信息。常州唯康信息科技有限公司开发的ULS是新型的,基于低速UWB的,专门用于测距及低速数据传输的定位技术。ULS系统产品可用于室内外的定位。 ULS应用国际最先进的定位技术,通过测量无线电波的传输时间(ToF)实现对两个点之间的距离测量,再通过三角定位法计算被测点的实际位置。ULS系统包括移动定位点、固定参考点以及主站系统三部分构成。 ULS定位系统具有以下的特点: 一.定位精度高 目前ULS动态测量精度,在室外空旷地带可以达到1米,在室内可以达到2 米。静态测量,在室内外均可达到最高0.1米的精度。并且可以进行3维测量。 而目前的GPS测量的精度在10-40米之间,通过差分GPS一般精度在1-5米。 下表是各种定位技术的精度比较表。
二.适应范围广 ULS基于低速率UWB技术,采用2.4G频段,使用时无需申请许可。它属于中短距离的射频通讯技术,可以通过组网对网络覆盖的所有范围进行定位,因此可以适用于室内外定位。在室外,每个参考点可以覆盖900米的范围,在室内,可以覆盖100米的范围。 三.精度稳定性高 ULS采用ToF方式测距并获得位置信息,不受天气、遮挡物的影响,通过最小二乘法、卡尔曼滤波等多种算法、最大限度摒除了多径效应对精度的影响,因此在室内室外具有几乎一致的精度及稳定性。 四.使用成本低 ULS技术采用同步双边测距技术来减少误差,与采用TDoA及技术的UWB定位系统相比,摒弃了昂贵的同步读写器,无需时钟同步电缆,也不需要昂贵的智能天线,大大降低了成本。参考点只有其它UWB读取器的价格的1/10-1/5,移动点只有其它UWB移动点价格的1/3-1/2。从此定位系统的大规模推广应用成为可能。 五.实时性能好 ULS定位点,每次定位时间为5-10ms,定位更新速率最高可达100Hz。实际应用中,从0.01Hz到20Hz可随意调节。 六.网络容量大 每一个参考点,同时可以对16个移动点进行定位,每次定位耗时5-10ms。这样,如果移动点以1Hz的更新率进行刷新,每一个参考点可以服务1600-3200个参考点。通过特殊处理,一个测量网络可以同时对多达上万个的移动点进行定位。 七.组网方便 ULS采用自适应的组网协议,参考点之间无需配置,可以自动形成一个无线网络,既可用于定位,也可用于定位数据传输。高级版本的ULS参考点具有自动
室内自主探索无人机系统 一,概述 室内无人机飞行系统主要针对室内无卫星导航信号,无合作目标,可对室内空间进行侦察、重复探测、飞行过程中能够躲避障碍、能自主任务规划,实现对室内各个空间的侦察或巡检等作业。为了满足此等作业要求,我们设计出地下空间环境自主飞行无人机系统总体方案。主要内容包括: 1)完成室内无源自主定位系统(TSLAM定位系统) 2)基于Linux系统超强运算能力的飞控硬件 3)适合室内自主起飞降落的飞控软件 4)实现自主路径探索的飞行导航软件 5)基于视觉引导降落的视觉系统 6)适合室内飞行的无人机飞行平台 二,系统框架与结构框架
系统框架 结构框架 三,内容详述 1,TSLAM定位系统 SLAM是采用同步定位与地图构建的一种无源建图定位技术,而TSLAM定位系统作为一整套室内定位系统的解决方案,其独创的tiny-EKF融合算法,已融合包含气压计、高精度imu、磁罗盘、激光雷达以及高精度光学编码里程计等传感器的数据融合。 SLAM系统近年来主在智能机器人领域得到了广泛的应用,比如扫地机器人、无人车等。目前SLAM技术中Cartographer开源框架比较先进,该框架适合通用性的SLAM,但对于无人机这种非二维平面的运动物体来讲,该框架要做到稳定的SLAM定位效果较差,容易产生发散漂移。目前TSLAM定位系统主要针对无人机重新开发算法,更符合无人机在室内环境的自主定位飞行作业。 优点如下: 1)、基于环境自然导航,无需对客户现场环境做任何的改造 2)、定位精度满足绝大部分场景应用 3)、配套相应的操作软件,易学易用 4)、变更使用场景简单,客户自由操作 5)、环境亮度要求低,日常光亮环境、昏暗环境皆可作业 6)、无惧磁干扰、多金属环境 2,TLSAM定位系统优势 1),对比相关开源项目 Cartographer Hectorslam Gmapping Gmapping是基于粒子滤波的SLAM算法,而Cartographer和Hectorslam 都是基于非线性优化的,现在已经很少用滤波方法来做SLAM了,绝大多数还是使用最小二乘法。 Cartographer是有后端的SLAM算法,而Hectorslam是无后端的,前者更适用于以建图为重点的应用,后者更适合以定位为重点的应用。
室内外无缝定位及位置综合服务系统 研发与示范应用
目录 一、项目研制背景 (1) (一)、国内外发展现状 (2) (二)、项目研制意义 (11) 二、项目研制内容 (14) (一)、主要研制和示范应用内容 (14) (二)、主要性能指标及先进性 (18) 三、项目研制方案 (20) (一)、技术方案 (20) (二)、关键技术及解决途径 (119) (三)、项目研制基础 (137) (四)、研制进度及实施周期 (149) 四、项目投资测算(财务)(向博、晏博?) (150) (一)、项目总投资及测算依据 (150) (二)、详细资金预算 (150) (三)、年度投资计划 (150) 五、项目组织实施方案 (151) (一)、项目分工 (151) (二)、项目组织 (151) (三)、项目管理 (157) 六、项目推广应用的经济和社会效益 (162)
(一)、经济效益分析 (162) (二)、社会效益分析 (168) 七、有关附件 (170)
一、项目研制背景 随着人类社会的进步,人们越来越关注自身的精确位置信息,以及兴趣点的定位和导航。全球卫星定位系统(GNSS)提供了有效的室外定位手段,成为很多人出行导航的必备工具。继美国的GPS和俄罗斯的GLONASS系统之后,我国北斗导航系统的建设进展顺利,在2012年形成覆盖亚太大部分地区的服务能力。我国北斗第二代卫星导航系统的民用开发,将服务于国民经济的各领域,是国家信息化建设、提高国家安全保障能力、从根本上扭转我国被国外卫星导航技术长期垄断的被动局面、提高国民经济效率和运行质量的至重任务。但是卫星导航也有它的不足和脆弱性,如卫星信号在受到干扰或遮挡时,将失去定位导航能力,在高楼林立的城市区域以及大型场馆的室内,卫星定位的精度会大幅降低,甚至无法定位,然而,大型公共场馆内部建筑结构复杂、人员密度高、场馆内设备数量大,对室内定位的需求十分迫切,定位与位置服务的“最后一公里”问题日益突出。 本项目顺应我国着力发展室内外无缝导航的战略需求,以行业龙头企业为示范和推广单位,联合采用不同定位技术以达到对室内外各种定位应用的无缝覆盖,同时保证各种场景下定位技术、定位算法、定位精度和覆盖范围的平滑过渡和无缝连接,通过建立自主可控且满足多行业和公众需求的室内外无缝定位及位置综合服务系统,推动行业应用的展开和技术标准规范的建立。本项目的建设实施,将有助于加快室内外定位导航基础设施建设、促进设备研发和产业化,推广基
UWB室内定位系统 页脚内容1
1.公司简介 成都恒高科技有限公司,致力于高精度无线定位技术与视觉图像处理技术,打造两者相结合的“四维高精度定位系统”。该系统包含传统意义的无线电三维空间合作式定位安防,并辅以视觉定位、视频联动的非合作式定位监管。 恒高旨在为客户提供全方位定位安防监管,以保障客户的人员物资安全。恒高结合定位及视觉数据,精准分析企业客户的人员行为,规范人员作业方式。在保障安全的同时,提升作业效率,为客户提供了丰厚的利润价值。 恒高依托电子科技大学前沿科学技术,及自身强劲的工程实践团队,在保证高精度定位系统优异效果的同时,将系统产品定价拉低了一个量级。为客户提供价值,并减小客户的成本投入。恒高现已申请专利技术二十余项,软件著作十余项,并不断有新技术转化为知识产权。 恒高拥有多个行业的系统解决方案,已实施于大型基建工地,石油化工,电力电网,养老院,监狱,并积极跟进智能社区,政府机关,机器人导航,旅游,停车场等等。恒高还在不断挖掘高精度定位系统的潜力,以期为更多行业服务。让每一个位置,每一张图像都发挥价值。 匠心永恒,高山景行。恒高于2014年成立至今,秉持匠心不断打磨产品及系统,力求为客户提供最好的产品、系统和解决方案! 页脚内容2
2.UWB无线定位 2.1系统方案 2.1.1定位概念 2.1.1.1UWB技术原理 超宽带(Ultra Wide-Band,UWB)是一种新型的无线通信技术,根据美国联邦通信委员会的规范,UWB的工作频带为3.1~10.6GHz,系统-10dB带宽与系统中心频率之比大于20%或系统带宽至少为500MHz。UWB信号的发生可通过发射时间极短(如2ns)的窄脉冲(如二次高斯脉冲)通过微分或混频等上变频方式调制到UWB工作频段实现。 超宽带的主要优势有,低功耗、对信道衰落(如多径、非视距等信道)不敏感、抗干扰能力强、不会对同一环境下的其他设备产生干扰、穿透性较强(能在穿透一堵砖墙的环境进行定位),具有很高的定位准确度和定位精度。 页脚内容3
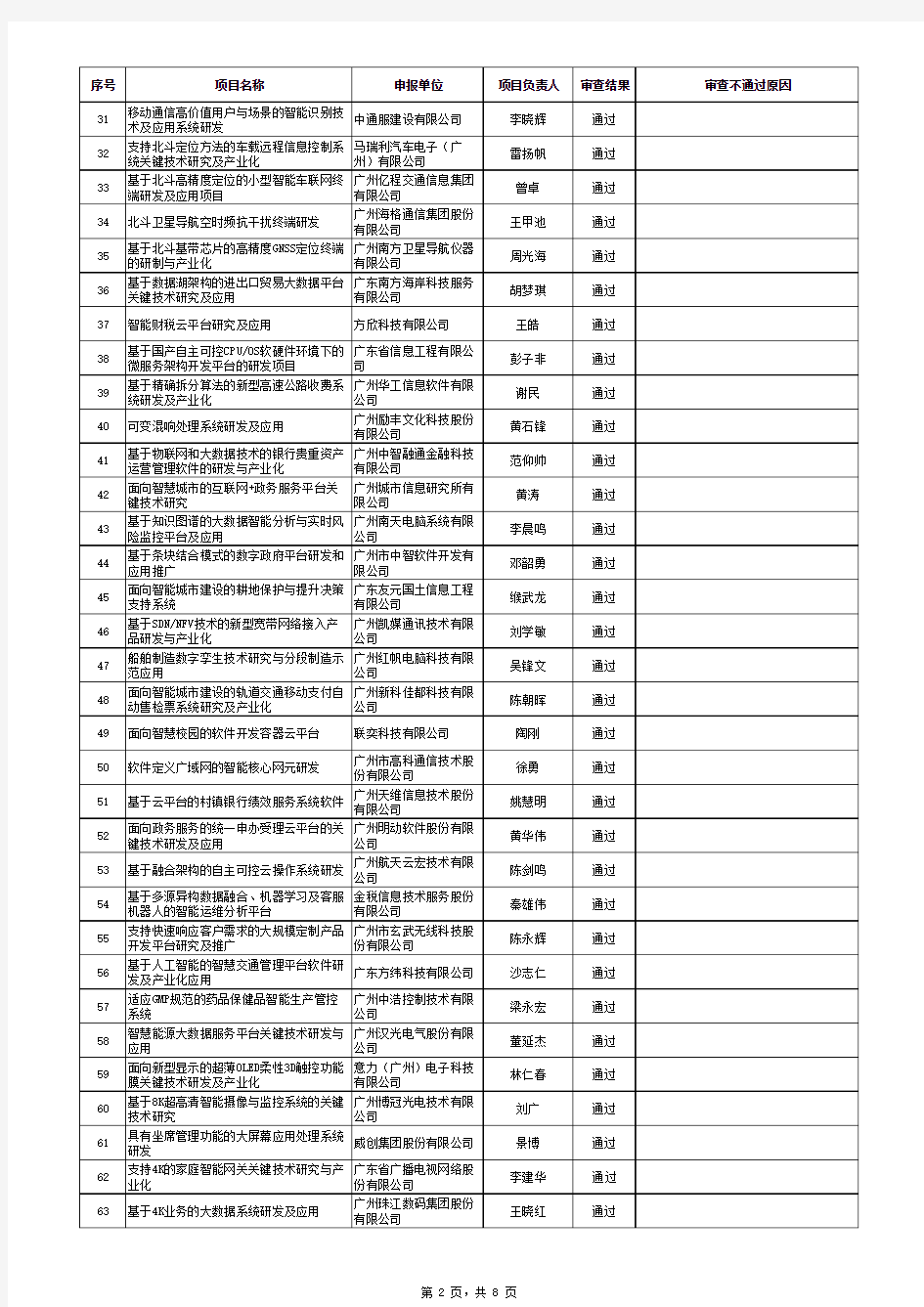
2017年全国大学生电子设计竞赛试题 参赛注意事项 (1)8月9日8:00竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题;高 职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。 (2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。 (3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生 身份的有效证件(如学生证)随时备查。 (4)每队严格限制3人,开赛后不得中途更换队员。 (5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设 计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。 可见光室内定位装置(I 题) 【本科组】 一、任务 设计并制作可见光室内定位装置,其构成示意图如图1所示。参赛者自行搭建不小于80cm×80cm×80cm 的立方空间(包含顶部、底部和3个侧面)。顶部平面放置3个白光LED ,其位置和角度自行设置,由LED 控制电路进行控制和驱动;底部平面绘制纵横坐标线(间隔5cm ),并分为A 、B 、C 、D 、E 五个区域,如图2所示。要求在3个LED 正常照明(无明显闪烁)的情况下,测量电路根据传感器检测的信号判定传感器的位置。 图1 可见光室内定位装置示意图 图2 底部平面坐标区域图 (cm)
二、要求 1.基本要求 (1)传感器位于B 、D 区域,测量电路能正确区分其位于横坐标轴的上、 下区域。 (2)传感器位于C 、E 区域,测量电路能正确区分其位于纵坐标轴的左、 右区域。 (3)传感器位于A 区域,测量显示其位置坐标值,绝对误差不大于10cm 。 (4)传感器位于B 、C 、D 、E 区域,测量显示其位置坐标值,绝对误差不 大于10cm 。 (5)测量电路LCD 显示坐标值,显示分辨率为0.1cm 。 2.发挥部分 (1)传感器位于底部平面任意区域,测量显示其位置坐标值,绝对误差不 大于3cm 。 (2)LED 控制电路可由键盘输入阿拉伯数字,在正常照明和定位(误差满 足基本要求(3)或(4))的情况下,测量电路能接收并显示3个LED 发送的数字信息。 (3)LED 控制电路外接3路音频信号源,在正常照明和定位的情况下,测 量电路能从3个LED 发送的语音信号中,选择任意一路进行播放,且接收的语音信号均无明显失真。 (4)LED 控制电路采用+12V 单电源供电,供电功率不大于5W 。 (5)其他。 三、说明 1.LED 控制电路和测量电路相互独立。 2.顶部平面不可放置摄像头等传感器件。 3. 传感器部件体积不大于5cm×5cm×3cm ,用“┼”表示检测中心位置。 4. 信号发生器或MP3的信号可作为音频信号源。 5. 在LED 控制电路的3个音频输入端、测量电路的扬声器输入端和供电电路端预留测试端口。 6. 位置绝对误差: 式中x 、y 为测得坐标值,x 0、y 0为实际坐标值。 7. 每次位置测量开始后,要求5s 内将测得的坐标值锁定显示。 8. 测试环境:关闭照明灯,打开窗帘,自然采光,避免阳光直射。 2020)()(y y x x e -+-=
一种基于WiFi的室内定位系统设计与实现 摘要:本文设计及实现了一个基于WiFi 射频信号强度指纹匹配的移动终端定位系统,并设计实现了一种基于权重值选择的定位算法。该算法为每个扫描到的AP 的RSSI 设定了选择区间,指纹库中落在此区间的所有位置点设平均权值,最后选取权重值最大者为待定位点的位置估计,如有相同权重值,则比较信号强度距离,取最小者,这种算法在一定程度上克服了RSSI 信号随机抖动对定位的影响,提高了定位的稳定性和精度。经实验测试,此系统在4 米范围内具有良好的定位效果。可部署在展馆、校园、公园等公共场所,为客户提供定位导航服务。定位算法运行于服务端,客户端为配备WiFi 模块的Android 手机。借助该定位系统,基于Android 系统的移动终端可方便地查询自身位置,并获取各种基于位置服务。 1. 引言 位置信息在人们的日常生活中扮演着重要的作用。在郊外、展览馆、公园等陌生环境中,使用定位导航信息可为观众游览提供更便捷的服务;在仓储物流过程中,对物品进行实时定位跟踪将大大提高工作效率;在监狱环境中,及时准确地掌握相关人员的位置信息,有助于提高安全管理水平,简化监狱管理工作。 目前全球定位系统(GPS , GlobalPositioning System)是获取室外环境位置信息的最常用方式。近年来,随着无线移动通信技术的快速发展,GPS 和蜂窝网络相结合的A-GPS(Assisted Global Positioning System)定位方式在紧急救援和各种基于位置服务(LBS,Location-Based Services)中逐渐得到了应用。但由于卫星信号容易受到各种障碍物遮挡,GPS/APGS 等卫星定位技术并不适用于室内或高楼林立的场合,目前无线室内定位技术迅速发展,已成为GPS 的有力补充。 一般来讲,使用无线信号强度获取目标位置信息的过程,就是建立无线信号强度和位置信息稳定映射关系的过程。现有室内无线定位系统主要采用红外、超声波、蓝牙、WiFi(Wireless Fidelity)、RFID(Radio FrequencyIdentification)等短距离无线技术。其中基于WiFi 网络的无线定位技术由于部署广泛且低成本较低,因此备受关注。其中由微软开发的RADAR 系统是最早的基于WiFi 网络的定位系统。它采用射频指纹匹配方法,从指纹库中查找最接近的K 个邻居,取它们坐标的平均作为坐标估计。而文献[5]介绍的室内定位系统则基于RSSI 信号的统计特性,采用贝叶斯公式,通过计算目标位置的后验概率分布,来进行定位。 本文同样基于WiFi 网络,设计和实现了一种无线室内定位系统,但与上述定位方法不同,本文采用了基于权值选择的定位算法,在一定程度上减少了RSS.信号随机变化引起的定位误差,实验结果表明,该系统可获得较好的定位精度(4 米)。 2. 系统设计
uwb室内定位系统详解 室内定位是物联网的基础服务之一,根据应用场景不同,可以促进企业的运作和营销效率提升,或为消费端用户提供更加便捷的体验。 目前而言室内定位根据服务对象和网络构架的不同,室内定位市场可以分为专用场地应用和通用场地应用两大类,并构成不同的商业模式。 室内定位安全管理系统由硬件定位设备、定位引擎和应用软件构成。系统采用UWB定位技术,通过TDOA到达时间差的算法实现三维定位,定位精度优于30cm,单区域支持多于1000张/秒的定位标签,精度高,容量大。 高精度室内定位系统应用软件支持PC端和移动端访问,并提供位置实时显示、历史轨迹回放、人员考勤、电子围栏、行为分析、多卡判断、智能巡检等功能。主要应用场景有:工厂人员/物资定位、监狱犯人定位、养老院老人定位、隧道/管廊施工人员定位、发电站定位。 室内定位系统架构: 应用层 通过解算层获取位置、人脸对比结果和视频联动视频流数据,以地图的形式实时显示个标签的位置和标签的携带者,并可以选择显示视频联动的监控画面。 服务层 服务层包括定位引擎软件、系统管理软件、对内和对外接口软件组成,这些
软件部署在系统服务器。 网络层 网络层分为局域网,提供数据传输通道。 传输层 传输层也称主干通信网(简称“主干网”),是定位基站、人脸识别和视频联动摄像头(设备)与解算层、应用层之间的数据传输通道,可以选择有线或者无线传输方式。 感知层 设备层主要包括定位基站和标签、人脸识别和视频联动摄像头。通过定位基站与定位标签的UWB定位信道实现对定位标签的定位,通过通信定位基站与定位标签的ZigBee通信信道实现定位基站对定位标签的参数配置、定位标签的状态回传以及定位标签上下行的数据。 UWB室内定位技术与GPS定位技术比较: 高精度室内定位系统使用精度优于0.3米的UWB定位技术,可以实现人员位置的实时监控和运动轨迹的回放,在巡检以及高危作业中结合相关流程可以实现精准的状态和行为监管。
郑州联睿电子科技有限公司 2017年1月
一背景与意义 1.1无线定位实验室建设的必要性 位置服务攸关国家安全、经济发展和社会民生,在新一代信息技术这一战略性新兴产业中,具有举足轻重和不可或缺的地位,在物联网、智慧地球、节能减排、救灾减灾等领域发挥着重要的基础性支撑作用。近年来,随着智能手机和移动互联网的迅速普及,人们对室内外高精度定位导航的需求呈现爆发式增长趋势。 发展位置信息服务产业对于扩内需、稳增长具有重大意义,也是我国战略性新兴产业的重要组成部分。在当今信息时代,其基础性和先导性的作用十分明显,正在深刻改变着人们的生产生活方式,孕育着新的经济增长点。随着现代信息社会快速发展,行业和社会公众对创新性和综合性的时空信息服务需求日益强烈,融合移动通信、互联网技术的位置服务应用,将有力推动位置信息应用产业结构升级,释放出更加广阔的市场空间。 2012年12月27日,我国宣布北斗导航系统正式提供区域定位导航服务,定位精度为10米,成为第三个拥有自主卫星导航系统的国家。但是由于起步晚,北斗系统面临市场占有率低、信号覆盖有限等方面的问题。在国家科技计划的支持下,室内外定位导航技术得到了极大的发展,不仅大幅度提升了我国定位领域的科技水平,还推动了位置信息服务行业的发展,满足了人们对于全时空高精度定位导航服务的需求。 2015年5月6日,863计划地球观测与导航技术领域“城市室内外高精度定位导航关键技术与服务示范”主题项目下设全部三个课题,顺利通过了科技部组织的技术验收。该课题融合地面基站系统与北斗卫星导航系统,将北斗导航服务从室外拓展到室内环境,满足了人们对于全时空高质量位置信息服务的需求。基于课题研究成果的星地融合广域高精度位置服务关键技术获得2014年度国家科学技术进步奖二等奖。上海市、合肥市、湖南衡阳市政府作为合作城市,百度、京东、中电四创、中兴通讯、长虹集团、中电24所等单位作为合作单位都已经与北邮签署了战略合作协议。这些应用与科研成果转化,提升了我国在国际室内定位领域的科技实力,对推动社会经济发展有重大意义。 随着国家的大力推广和市场的强烈需求,各行业部门、地方省市提出建设或更新原有定位系统以形成广域室内外无缝定位系统;我国各大企业纷纷支持室内外一体化定位系统的建设和应用推广,中国电信、中国联通开展了定位及服务的示范;华为、长虹、合众思壮等企业开始研究将北斗信号接入手机应用中,并已取得了良好进展,基于位置的服务市场更是快速发展,例如导航信息提供商高德软件公司2012年已拥有超过1亿手机用户,年增长速度
2017全国大学生电子设计竞赛 设计报告 可见光室内定位装置(I题) 菏泽学院 蒋震机电工程学院 编号: 队员: 二〇一七年八月十日
摘要 本系统由 STC89C52RC最小系统板为核心,光敏传感器根据光照强度分别检测XY轴坐标,PCF8591A/D转换器将传感器检测的光照转化为数字量,通过电路传递到 LCD1602液晶显示屏,在LCD1602液 晶显示屏显示XY轴及五个区域。按键按下将当前的数字量记录下来 并设为基准值,根据新检测的数字量相对基准值判断Y轴坐标,从而实现校正原点。顶部平面采用三个开关,一个47Ω的电阻和一个二 极管组成控制电路,控制三个大功率发光二极管。由此完成定位。 关键词: STC89C52RC最小系统板光敏传感器 PCF8591A/D转换器LCD1602液晶显示屏 Abstract: This system by STC89C52RC minimum system board as the core, the photosensitive sensor based on light intensity detection XY coordinates, respectively PCF8591A a/D converter sensor detection of light can be converted to digital quantity, through the circuit to the LCD1602 LCD screen, the LCD1602 LCD display shows the XY axis and five areas.Press the button to record the current digital quantity and set it as the base value, and determine the Y-axis coordinate according to the new test digital relative reference value, so as to realize the correct origin.At the top of the plane using three switch, a 47 Ω resistance and a diode control circuit, control three power leds.This completes the positioning.
一种基于WiFi的室内定位系统设计与实现摘要:本文设计及实现了一个基于WiFi 射频信号强度指纹匹配的移动终端定位系统,并设计实现了一种基于权重值选择的定位算法。该算法为每个扫描到的AP 的RSSI 设定了选择区间,指纹库中落在此区间的所有位置点设平均权值,最后选取权重值最大者为待定位点的位置估计,如有相同权重值,则比较信号强度距离,取最小者,这种算法在一定程度上克服了RSSI 信号随机抖动对定位的影响,提高了定位的稳定性和精度。经实验测试,此系统在4 米范围内具有良好的定位效果。可部署在展馆、校园、公园等公共场所,为客户提供定位导航服务。定位算法运行于服务端,客户端为配备WiFi 模块的Android 手机。借助该定位系统,基于Android 系统的移动终端可方便地查询自身位置,并获取各种基于位置服务。 1. 引言 位置信息在人们的日常生活中扮演着重要的作用。在郊外、展览馆、公园等陌生环境中,使用定位导航信息可为观众游览提供更便捷的服务;在仓储物流过程中,对物品进行实时定位跟踪将大大提高工作效率;在监狱环境中,及时准确地掌握相关人员的位置信息,有助于提高安全管理水平,简化监狱管理工作。 目前全球定位系统(GPS , GlobalPositioning System)是获取室外环境位置信息的最常用方式。近年来,随着无线移动通信技术的快速发展,GPS 和蜂窝网络相结合的A-GPS(Assisted Global Positioning System)定位方式在紧急救援和各种基于位置服务(LBS,Location-Based Services)中逐渐得到了应用。但由于卫星信号容易受到各种障碍物遮挡,GPS/APGS 等卫星定位技术并不适用于室内或高楼林立的场合,目前无线室内定位技术迅速发展,已成为GPS 的有力补充。 一般来讲,使用无线信号强度获取目标位置信息的过程,就是建立无线信号强度和位置信息稳定映射关系的过程。现有室内无线定位系统主要采用红外、超声波、蓝牙、WiFi (Wireless Fidelity)、RFID(Radio FrequencyIdentification)等短距离无线技术。其中基于WiFi 网络的无线定位技术由于部署广泛且低成本较低,因此备受关注。其中由微软开发的RADAR 系统是最早的基于WiFi网络的定位系统。它采用射频指纹匹配方法,从指纹库中查找最接近的K 个邻居,取它们坐标的平均作为坐标估计。而文献[5]介绍的室内定位系统则基于RSSI 信号的统计特性,采用贝叶斯公式,通过计算目标位置的后验概率分布,来进行定位。 本文同样基于WiFi网络,设计和实现了一种无线室内定位系统,但与上述定位方法不同,本文采用了基于权值选择的定位算法,在一定程度上减少了RSS.信号随机变化引起的定位误差,实验结果表明,该系统可获得较好的定位精度(4 米)。 2. 系统设计 本系统可为移动终端客户在展馆、商场、校园等应用场景提供定位服务。鉴于移动终端受到计算能力、存储容量和电池电量等诸多限制,所以仅完成简单的信号采集工作,定位计算由定位服务端完成。 定位系统的架构体系如图1 所示。服务端主要负责定位计算和响应终端的定位请求。基于负载均衡考虑,响应位置请求的Web 服务器和运行定位计算的定位服务器分离,数据交换方式采用客户端和Web 服务器相同的数据交换方式。客户端依附于具体对象,主要负责采集周边AP 的无线信号强度,并向服务端提交信号特征,服务器使用客户端采集的信号特征进行定位计算,获得移动终端的位置估计。 客户端和服务端通信采用标准的HTTP协议,编程方便,可扩展性好,客户端程序功能
2017 年全国大学生电子设计竞赛试题
参赛注意事项
(1)8 月 9 日 8:00 竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题;高 职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。 (3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生
身份的有效证件(如学生证)随时备查。 (4)每队严格限制 3 人,开赛后不得中途更换队员。 (5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设
计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违 纪参赛队取消评审资格。 (6)8 月 12 日 20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
可见光室内定位装置(I 题)
【本科组】
一、任务
设计并制作可见光室内定位装置,其构成示意图如图 1 所示。参赛者自 行搭建不小于 80cm×80cm×80cm 的立方空间(包含顶部、底部和 3 个侧面)。 顶部平面放置 3 个白光 LED,其位置和角度自行设置,由 LED 控制电路进 行控制和驱动;底部平面绘制纵横坐标线(间隔 5cm),并分为 A、B、C、 D、E 五个区域,如图 2 所示。要求在 3 个 LED 正常照明(无明显闪烁)的 情况下,测量电路根据传感器检测的信号判定传感器的位置。
LED 控制电路 LED1 LED2 LED3
y(cm)
40
B
20
A
-40
- 20
0
E
C
20
40 x(cm)
- 20
D
传感器
测量电路
LCD