
综合测试一
一、填空、选择题(15分)
1、设螺纹的升角为λ,接触面的当量摩擦系数为v f,则螺旋副自锁的条件是.
2、在设计滚子从动件盘状凸轮廓线时,若发现工作廓线有变尖现象,则在尺寸参数改变上应采取的措施是
3、基本杆组的自由度应为。
(A) -1; (B) +1; (C) 12R 。4、对心曲柄滑块机构以曲柄为原动件时,其最大传动角γ
为。
A)
α;B)45 ;C)ω1。
5、曲柄滑块机构是改变曲柄摇杆机构中的而形成的。在曲柄滑块机构中改变而形成偏心轮机构。在曲柄滑块机构中以而得到回转导杆机构。
6、高副低代中的虚拟构件及其运动副的自由度应为。
(A) v5; (B) +1 ; (C) 0 ; (D) 6。
7、对于绕固定轴回转的构件,可以采用的方法使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。若机构中存在作往复运动或平面复合运动的构件应采用方法,方能使作用于机架上的总惯性力得到平衡。
8、渐开线齿廓的形状完全取决于。
9、为了减少飞轮的质量和尺寸,应将飞轮安装在轴上。
10、蜗轮的螺旋角应蜗杆的升角,且它们的旋向应该
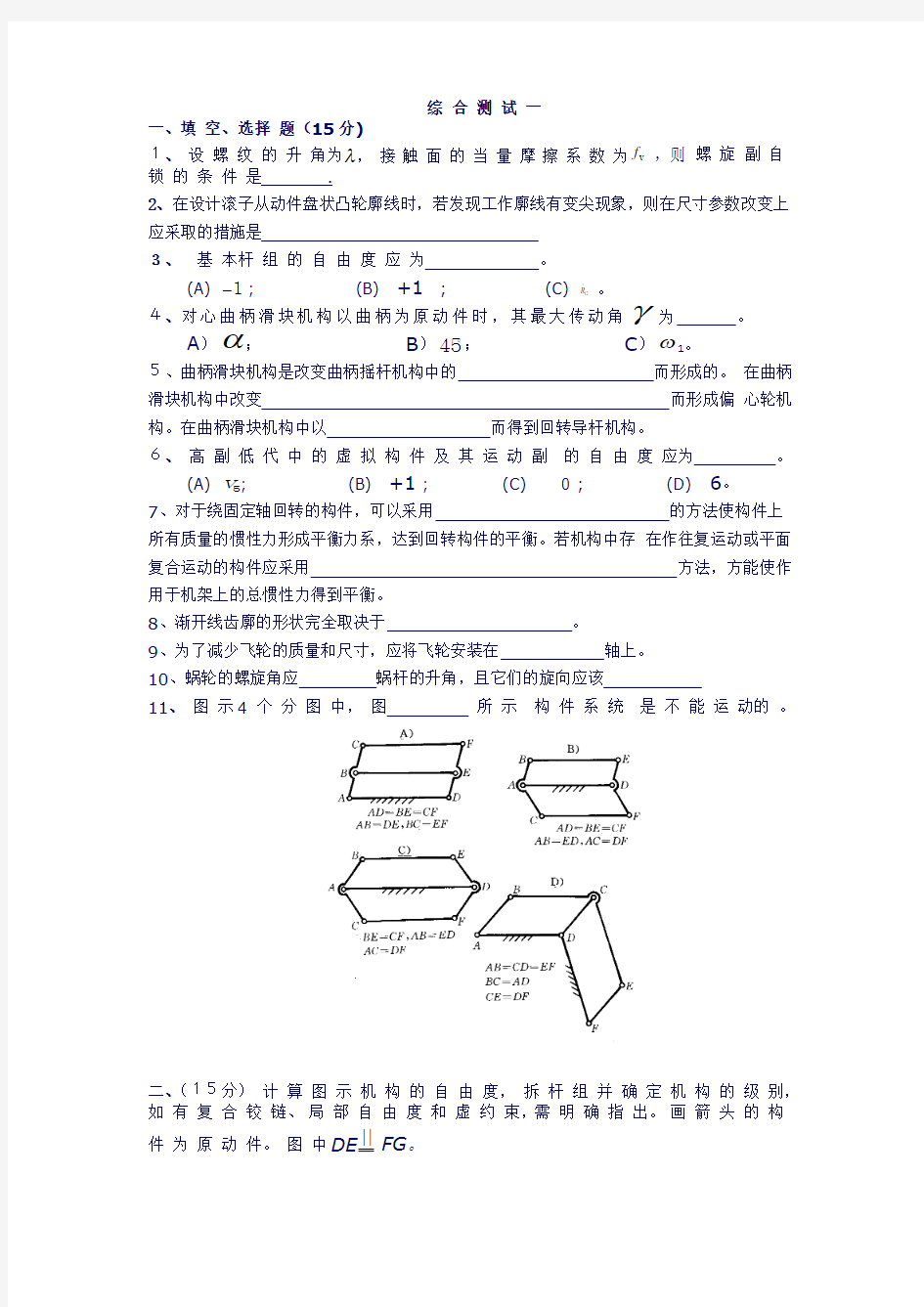
11、图示4 个分图中,图所示构件系统是不能运动的。
二、(15分)计算图示机构的自由度,拆杆组并确定机构的级别,如有复合铰链、局部自由度和虚约束,需明确指出。画箭头的构件为原动件。图中DE
| | FG。
L
三、(10分)一对心直动尖顶从动件偏心圆凸轮机构,O为凸轮几何中心,O1为凸轮转动
中心,直线r
M⊥BD,O1O=0。5OA,圆盘半径R=60 mm。
(1)根据图a及上述条件确定基圆半径r0、行程h,C点压力角?
和D点接触时
的位移d M、压力角αD。
(2)若偏心圆凸轮几何尺寸不变,仅将从动件由尖顶改为滚子,见图b,滚子半径
z 1
15
=mm。试问上述参数z
2
30=、h、z z
24
30
==和z
5
40=、z620=有否改变?如认为没有改变需明确回答,
但可不必计算数值;如有改变也需明确回答,并计算其数值。
a) b)
四、(15分)在图示机构中,已知各构件尺寸,构件1以等角速度ω1转动,
(1)标出所有瞬心。
(2)用相对速度图解法求构件3的角速度n6和角加速度α3;(列出矢量方程式,并分析各量的大小和方向,做出矢量多边形,可不按比例尺但方向必须正确。)
五、(10分)图 示 为 凸 轮 连 杆 组 合 机 构 运 动 简 图。 凸 轮 为 原 动 件, 滑 块 上 作 用 有 工 作 阻 力 Q , 各 转 动 副 处 的 摩 擦 圆 ( 以 细 线 圆 表 示) 及 滑 动 摩 擦 角α=?20如 图 示。试:
(1) 在 简 图 上 画 出 各 运 动 副 处 的 约 束 反 力 ( 包 括 作 用 线 位 置 与 指 向);
(2) 画 出 力 多 边 形;(可不按比例,但力的方向必须正确)
六、(15分 )在图示轮系中,已知25.0*
=c 。齿轮模数921123=a 相同,压力
角?=5.24
α,齿顶高系数21x x =,试:
(1)计算机构自由度,该轮系是什么轮系?
(2)求手柄c 对齿轮m 的传动比1b p ;能否用作微调机构? (3)当模数
2
b
p 时,若x 1和x 2采用标准齿轮传动,则1f r 和2f r ,应采用何种齿轮传 动类型?
(4)由于1
a r
,能否把它们做成一个齿轮?该齿轮用范成法加工时,会不会根 切?
(5)能否把2a r 做成标准斜齿圆柱齿轮来满足中心距要求?若可以,写出斜齿圆 柱齿轮的螺旋角 的关系式。
七 、(10分 )在铰链四杆机构中,已知R 020=mm ,l BC =110mm ,l CD =80mm ,
l AD =120mm ,构件 1为原动件。
(1)判断构件1能否成为曲柄;
(2)用作图法求出构件3的最大摆角ψmax ;
(3)用作图法求出最小传动角γmin ;
(4)当分别固定构件1、2、3、4时,各获得何种机构?
m/mm
八、( 10分 )一机器作稳定运动,其中一个运动循环中的等效阻力矩
M r 与等
效驱动力矩
M d 的变化线如图示。机器的等效转动惯量J =1kg ?m 2,在运动循环开始时,等效构件的角速度ω0=20 rad/s ,试求:
(1)等效驱动力矩M d ;
(2)等效构件的最大、最小角速度ωmax 与ωmin ;并指出其出现的位置;确定
运转速度不均匀系数;
(3)最大盈亏功
?W m a x ;
(4)若运转速度不均匀系数δ =0.1,则应在等效构件上加多大转动惯量的飞
轮?
综合测试二
一、填空题(每空1分,总计15分)
1、用飞轮进行调速时,若其它条件不变,则要求的速度不均匀系数越小,飞轮的转动惯量将越 ,在满足同样的速度不均匀系数条件下,为了减小飞轮的转动惯量,应将飞轮安装在 轴上。
2、能实现间歇运动的机构有 、 、 。
3、试将图a )、b )所示直动平底从动件盘形凸轮机构的压力角数值填入括号内。
a )α=30 =( );
b )α=30 =( )。
4、在图示4个分图中,图 是Ⅲ级杆组,其余都是个Ⅱ级杆组的组合。
5、齿轮渐开线的形状取决于 。
6、图示轮系,给定齿轮1的转动方向如图所示,则齿轮3的转动方向。 (A )与ω1相同;(B )与ω1相反;(C )只根据题目给定的条件无法确定。
7、作连续往复移动的构件,在行程的两端极限位置处,其运动状态必定是 。
(A)?ABD ;(B)2
d
,v
p d D v
2
2= μ;(C)5
2424D D D D D v v v v
=+=,v v v pd D D D v ===544μ;(D)ω5,==DE D l v /55ω。
8、已知一铰链四杆机构ABCD ,)/()(4l v DE pd μμmm ,
a D mm , 2
2
d
b a ?mm ,
ABD ?mm ,且AD
为机架,BC 为AD 之对边,那么,此机构为 。
A )双曲柄机构;
B )曲柄摇杆机构;
C )双摇杆机构;
D )固定桁架。 9、对于绕固定轴回转的构件,可以采用 的方法使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。若机构中存在作往复运动或平面复合运动的构件应采用 方法,方能使作用于机架上的总惯性力得到平衡。
10、直动从动件盘形凸轮的轮廓形状是由 决定的。 二、(本大题10分)
计算图示机构的自由度,判别其是否具有确定运动,并拆杆组进行机构分析,指出它们属于哪一级机构(箭头表示原动件)。
三、(本大题10分)
在图示六杆机构中,已知机构运动简图、部分速度多边形、加速度多边形以及原动件的角速度常数,试用相对运动图解法求ω2的速度24D D v 及加速度D a ,构件DE l 的角速度5ω及
角加速度
5α。
四、(本大题10分)
如图示插床的导杆机构,已知:AB AD ==5040 mm mm ,,行程速比系数K =1
4.,求曲柄BC 的长度及插刀P 的行程H 。
五、(本大题10分)
图示压榨机在驱动力P
作用下产生压榨力Q 。设各转动副A 、B 、C 、D 处的摩擦圆及
移动副的摩擦角?如图示。试在机构图上画出各运动副的反力(作用线位置与力指向);
注:图中细线圆为摩擦圆。
六、(本大题10分)
一偏置直动尖项从动件盘形凸轮机构如图所示。已知凸轮为一偏心圆盘,圆盘半径
R =30mm ,几何中心为A ,回转中心为O ,从动件偏距OD =e=10mm ,OA =10mm 。凸轮
以等角速度ω逆时针方向转动。当凸轮在图示位置,即AD ⊥CD 时,试求:
(1)凸轮的基圆半径r 0
;(2)图示位置的凸轮机构压力角α;
(3)图示位置的凸轮转角?;(4)图示位置的从动件的位移s ; (5)该凸轮机构中的从动件偏置方向是否合理,为什么?
七、(本大题10分)
如图所示的齿轮传动装置,其有关参数如下:z 119=, z 258=, z 317=, z 463=, a a 1234160==mm, αα==?n 20
, m m ==n 4mm, h a *
=1.求 (1)斜齿轮2的螺旋角方向(可在图上直接标出); (2)为了满足中心距的要求,斜齿轮的螺旋角为多少度;
(3)若两对齿轮均采用直齿圆柱齿轮传动,则分别采用何种传动类型?啮合角各为多大?
八、(本大题10分)
图示轮系中,各轮模数和压力角均相同,都是标准齿轮,各轮齿数为
z 123=,r/min ,,,,,, 15003317404092511544332=======n z z z z z z ,转向如图示。试求齿轮2'的齿数z 2'及n A 的大小和方向。
九、(本大题15分)
一机组作稳定运动,原动件的运动周期为2π。若取原动件为等效构件,则等效阻力矩
M r 如图所示,等效驱动力矩M d 为常数。等效构件的平均转速为1000 r/min ,若忽略各构
件的等效转动惯量,只计装在原动件上的飞轮转动惯量,求:
(1)等效驱动力矩M d 的大小;
(2)若速度不均匀系数,则等效构件的最大角速度和最小角速度为多少?它们相应的位置?各为何值?
(3)最大盈亏功?W
max ; (4)飞轮转动惯量J F 。
综 合 测 试 三
一、填空题(将正确的答案填在题中横线上方空格处, 每空1分,总计10分)。
1、 在图示平面运动链中, 若构件1为机架, 构件5为原动件, 则成为
级机构;若以构件2为机架,3为原动件,则成为 级机构。
2、 斜齿轮 面上的参数是标准值;用齿条型刀具加工αn =?20, β=30? 的斜齿圆柱齿轮时不根切的最少齿数是 。
3、符合静平衡条件的回转构件,其质心位置在 。静不平
衡的回转构件,由于重力矩的作用,必定在 位置静止,由此可确定应加上或去除平衡质量的方向。
(题1图)
4、当原动件作等速转动时,为了使从动件获得间歇的转动,则可以采用 机构。(写出三种机构名称。)
5、凸轮的基圆半径越小,则凸轮机构的压力角越 ,而凸轮机构的尺寸越 。
二、选择题(将正确的代码填入横线上方的空格处,每小题1分,共5分)。 1、若从动件的运动规律选择为等加速等减速运动规律、简谐运动规律或正弦加速度运动规律,当把凸轮转速提高一倍时,从动件的加速度是原来的 倍。 (A )1; (B )2; (C )4; (D )8。
2、齿轮经过正变位修正后,其分度圆同未修正时相比,是 。 (A ) 相同; (B )减少; (C ) 增大。
3、斜齿圆柱齿轮基圆柱上的螺旋角βb 与分度圆上的螺旋角β相比 。 (A ) βb >β; (B ) βb <β; (C ) βb =β。
4、图示轮系,给定齿轮1的转动方向如图所示,则齿轮3的转动方向。
(A )与P 12相同; (B )与P 12相反; (C )只根据题目给定的条件无法确定。 5、将作用于机器中所有驱动力、阻力、惯性力、重力都转化到等效构件上,求得的等效力矩和机构动态静力分析中求得的在等效构件上的平衡力矩,两者的关系应是 。
(A)数值相同,方向一致; (B)数值相同,方向相反; (C)数值不同,方向一致; (D)数值不同,方向相反。
三、(10分)图示为一偏置直动滚子从动件盘形凸轮机构。试在图上:
(1)画出并标明基圆r 0; (2)作出并标明凸轮按ω方向转过60?后,从动件与凸轮廓线接触处的压力角α;
(题4图)
(3)作出并标明滚子从图示位置反转到B 处与凸轮接触时,对应的凸轮转角?。 四、(10分)图示机构中,构件1为原动件,构件4为运动输出构件,A 、B 为固定铰链,试:
(1)画出该机构的示意图;
(2)计算机构的自由度;
4
C
(题四图)
五、(15分)在图示的机构运动简图中,设已知各构件的尺寸及原动件1的速度1v 和加速度1a ,现要求:
(1)确定在图示位置时该机构全部瞬心的位置;
(2)用瞬心法求构件2及构件3的瞬时角速度ω2、ω3(列出计算式,不求具体值);
(3)求构件2上瞬时速度为零的点的位置(在图上标出);
(题三图)
(4)用矢量方程图解法求构件3的瞬时角加速度α3(列出计算式,画出速度和加速度多边形,不求具体值)。
六、(10分)已知一对渐开线直齿圆柱齿轮的参数分别为:z 115=,z 221=,m =5,
α=?20,1*a =h ,25.0*
=c ,x 103128=.,x 201921
=-.。 (1)判断在用齿条型刀具范成加工这两个齿轮时,是否会产生根切现象(注意:必
须有计算过程);
(2)求出这一对齿轮作无侧隙啮合传动时的中心距a ';
(3)说明这一对齿轮的啮合传动属于哪一种类型。 [附]:无齿侧间隙啮合方程式
α
ααtg )
(2inv inv 2
121 z z x x +++
='
七、(15分)在偏置曲柄滑块机构中,已知滑块行程为
x 1
,当滑块处于两个极
限位置时,机构压力角各为x 1min 和x 201921
=-.,试求: (1)杆长x 2、x 2min 及偏距e ; (2)该机构的行程速度变化系数K ;
(题五图)
(题七图)
(3)该机构的最大压力角a';
八、(10分)图示的机构运动简图中,已知生产阻力Q=300N,各转动副的摩擦圆(以细线圆表示)及滑动摩擦角已示于图中,试:
(1)在图中画出各运动副反力的作用线及方向;
(2)列出构件2、4的力平衡方程式,并画出力多边形;
综合测试四
一、填空题、选择题(每空1分,总计35分)
1、在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____ 个约束,构件数、约束数与机构自由度的关系是。
2、机构具有确定的相对运动条件是原动件数机构的自由度。
3、在条件下,曲柄滑块机构具有急回特性。
4、凸轮的基圆半径越小,则凸轮机构的压力角越,而凸轮机构的尺寸越。
5、用矢量方程图解法对机构进行运动分析时,速度影像原理只能应用于的各点。
6、为了使机构具有急回运动,要求运动行程速比系数。
(A)K=1 (B)K>1 (C) K<1
7、渐开线齿廓的形状完全取决于。
(A)基圆半径(B)齿数(C)压力角
8、用标准齿条型刀具加工标准齿轮,产生根切的原因是。
9、在斜齿轮传动中,除了用变位方法来凑中心距外,还可以用来凑中心距。
10、在周转轮系中,轴线固定的齿轮称为;兼有自转和公转的齿轮称为;而这种齿轮的动轴线所在的构件称为。
11、三个做相对平面运动的构件的三个瞬心应在。
12、渐开线直齿圆柱外齿轮齿廓上各点的压力角是不同的,它在上的压力角为零,在上的压力角最大;在上的压力角则取为标准值。
13、机构中的构件是由一个或多个零件所组成,这些零件间产生任何相对运动。
(A)可以;(B)不能
14、凸轮机构按照推杆的形状可以分为、、。
15、在曲柄摇杆机构中,当和共线时,机构处于极限位置;当和处于共线的两位置时,必有一位置是传动角最小的位置。
16、要将一个曲柄摇杆机构转化成双摇杆机构,可以用机架转换法将。
A)原机构的曲柄作为机架;B)原机构的连杆作为机架;
C)原机构的摇杆作为机架。
17、直齿圆柱齿轮正确啮合的条件是。
18、对于转速较高的凸轮机构,为了减小冲击和振动,从动件运动规律最好采用运动规律。
(A)等速;(B)等加速等减速;(C)正弦加速度。
19、在两构件的相对速度瞬心处,瞬时重合点间的速度应有。
(A)两点间相对速度为零,但两点绝对速度不等于零;
(B)两点间相对速度不等于零,但其中一点的绝对速度等于零;
(C)两点间相对速度不等于零且两点的绝对速度也不等于零;
(D)两点间的相对速度和绝对速度都等于零。
20、机器运转时的速度波动有速度波动和速度波动两种,前者采用,后者采用进行调节。
二、(本大题16分)
计算图示两机构的自由度。若有复合铰链,局部自由度,虚约束,须明确注明。
(1)(2)
三、(本大题15分)
在图示铰链四杆机构中,已知杆a=100mm,杆b=300mm,c=200mm,d=250mm,ω
=10rad/s。
1
(1)试用瞬心法求图示位置时,构件2和构件3的角速度ω2、ω3。
(2)若以a为原动件,直接在图示曲柄摇杆机构中用作图法求该机构的最小传动角
min的大小。
四、(本大题20分)
现有一对渐开线标准外啮合直齿圆柱齿轮,已知参数为1221==z z ,α=?20,1*a =h ,
25.0*=c ,m =2 。试求:
(1) 齿轮1的分度圆半径r 、 齿根圆半径f r 、齿顶圆半径a r 、基圆半径b r 、齿厚s 和齿槽宽e ;
(2) 齿轮传动的中心距a 。
(3) 判断齿轮是否有根切, 为什么?
五、(本大题14分)
今有一个二级减速器,机构运动简图如图所示,同一中心距上装有两对渐开线直齿圆柱齿轮,Ⅰ为输入轴,Ⅲ为输出轴。已知各轮齿数161=z ,z 248=,z 312=,z 440=,输入轴Ⅰ的转速n 1=1000转/分。试确定该轮系的传动比及输出轴Ⅲ的转速n 3。
III
I
综合测试五
一、(15分)填空题(将正确的答案填在题中横线上方空格处)。
1、在平面机构中若引入一个高副将引入______ 个约束,而引入一个低副将引入_____ 个约束,构件数、约束数与机构自由度的关系是。
2、设螺纹的升角为λ,接触面的当量摩擦系数为f v,则螺旋副自锁的条件是。
第4题图
3、在条件下,曲柄滑块机构具有急回特性。
4、凸轮的基圆半径越小,则凸轮机构的压力角越,而凸轮机构的尺寸。
5、有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于。
(A) 0; (B) 1; (C) 2
6、高副低代中的虚拟构件及其运动副的自由度应为。
(A) -1; (B) +1 ; (C) 0 ;
7、构件1、2间的平面摩擦的总反力0的方向与构件2对构件1 的相对运动方向所成角度恒为。
A) 0o; B) 90o;
C) 钝角;D) 锐角。
8、当凸轮基圆半径相同时,采用适当的偏置式从动件可以凸轮机构推程的压
力角。
(A)减小;(B)增加;(C)保持原来。
9、用标准齿条型刀具加工标准齿轮,产生根切的原因是。
10、在斜齿轮传动中,除了用变位方法来凑中心距外,还可以用来凑中心距。
11、回转构件的动平衡是指消除。
12、一对共轭齿廓在公法线上的相对速度为。
二、(8分)试画出图示机构的传动角γmax和压力角30 ,并判断哪些机构在图示位置正处于“死点”?
三、(12分) 已 知 图 示 机 构 的 位 置 及 各 杆 尺 寸,90 = 常 数。 试 用 相
对 运 动 图 解 法 作 运 动 分 析, 求 -1、a 5。( 列 出 必 要 的 方 程 式 及 求 解 式
。〕
四、(10分) 如 图 示 机 构, 试: (1) 计 算 自 由 度( 若 有 复 合 铰 链、 局 部 自 由 度 和 虚 约 束, 需 明
确 指 出);
(2) 高 副 低 代;
(3) 分 析 机 构 的 杆 组 并 确 定 机 构 级 别。
五、(10分) 图 示 凸 轮 - 连 杆 组 合 机 构。 已 知 机 构 尺 寸, 生 产 阻 力 矩
AC , 高 副 A 处 和 移 动 副 的 摩 擦 角α C
及 转 动 副 摩 擦 圆 如 图 中 所 示
。 试
(1)在机构图上画出各运动副的总反力(作用线及力的指向); (2)写出构件2的力平衡矢量方程式,画出力多边形;
(3)写出应加于凸轮上驱动力矩h D 的步骤和有关计算式。
六、(10分)在 图 示 轮 系 中, 已 知 各 轮 齿 数 为 r r =10,
r 0
?,α C ,
h D , D
α
。 n 11440= r/min ( 其 转 向 如 图 中 箭 头 所 示), 试 求 轮
6 的 转 速 ω3 的 大 小 及 方 向( 方 向 用 箭 头 标 在 图 上)。
七、(15分)现 有 一 对 渐 开 线 外 啮 合 直 齿 圆 柱 齿 轮 传动,已知参数为
1221==z z ,
?
,1*
a =h , z z z z a
b g f ====50493030,,,, 实 际 中 心 距
m
mm , 啮
合 角α
=20
, 两 轮 的 变 位 系 数 相 等, 即h a *=1。 试 求:
(1) 两 齿 轮 的 模 数 a 和 基 圆 周 节i ca '、m =1;
(2) 两 齿 轮 的 变 位 系 数z a 、z g , 且 属 何 种 传 动 类 型;
(3) 两 齿 轮 的 齿 根 圆 半 径z b 、z f 和 齿 顶 圆 半 径z z g f =、z z b f ,;
(4) 判 断 齿 轮 是 否 有 根 切, 为 什 么?
注: 无 侧 隙 啮 合 方 程:
β
八、(10分)图示一偏置尖顶从动件盘形凸轮机构,凸轮1的廓线为渐开线,凸轮以ω110
=rad/s ,逆时针转动,图中偏心距e =基圆半径l AB =30mm ,B 点向径R =50 mm ,试
问:
(1)从动件2在图示位置的速度v 2= ; (2)从动件2向上的运动规律是 运动规律; (3)凸轮机构在图示位置的压力角30 = ;
(4)如把尖顶从动件尖端B 处改为平底(⊥于构件2),则从动件的运动规律是否改 变?为什么?
九、(10分)一机器作稳定运动,其中一个运动循环中的等效阻力矩
M r 与等效
驱动力矩
M d 的变化线如图示。机器的等效转动惯量J =1kg ?m 2,在运动循环开始时,等效构件的角速度ω0=20 rad/s ,试求:
(1)等效驱动力矩M d ;
(2)等效构件的最大、最小角速度ωmax 与ωmin ;并指出其出现的位置;确定
运转速度不均匀系数;
(3)最大盈亏功
?W m a x ;
(4)若运转速度不均匀系数δ =0.1,则应在等效构件上加多大转动惯量的飞
轮?
关于10年大工机械复试的些许信息我是10年参加复试的。我将我复试期间的一些信息、试题公布给大家,希望能对学弟学妹们有所帮助! 今年是学校统一排名、录取,进入复试名单的有272人,最后加上工程硕士共录取了245人(当然,这些数据都是除去推免生后得的),被录取的人中初试最低分数线为315分。工程硕士除推免生外招了四十多个。除去没来参加复试的十几人,最后才被刷了十五六人。所以大工还是比较好考的,欢迎大家报考大工! 大工是很公平的,成绩从不过夜,且今年只包括10个大工本校的!今年是3月27日晚上11:30分左右贴出成绩的。 一、复试之笔试科目如下: 1.《机械工程控制基础(第一版),祝守新、邢英杰、韩连英主编,清华大学出版社出版,2008年8月 或 《控制工程基础》,王益群、孔祥东,机械工业出版社. 2.《机械设计》(第八版),濮良贵、纪名刚,高等教育出版社。 3.《机械原理教程》,申永胜,清华大学出版社。 或:《机械原理》,孙桓、陈作模,高等教育出版社,2001年 或:《机械原理》,王知行、刘廷荣,高等教育出版社,2000年。
4.《微型计算机系统原理及应用》(第二版),杨素行等,清华大学出版社。 5.《机械工程测试技术基础》第3版,熊诗波、黄长艺主编,机械工业出版社 6.《机械精度设计与检测技术》,陈隆德、赵福令主编,机械工业出版社出版。 二、复试内容和形式: 1、专业笔试 主要为专业基础课和专业课综合测试,重点考查所报学科(专业)基础知识(参考书目见招生简章),闭卷考试2小时,满分100分。专业笔试共考6门课程。《机械设计》、《机械原理》、《微机原理及应用》、《机械工程测试技术》和《机械精度设计与检测技术》等5门为所有考生的复试必考课程,各16分。另外,初试已考《机械制造技术基础》者,本次复试需考《控制工程基础》(20分),不再考《机械制造技术基础》;初试已考《控制工程基础》者,本次复试需考《机械制造技术基础》(20分),不再考《控制工程基础》。 2、外语听力和口语测试 听力15分,口语15分,满分30分。 3、综合面试 考察考生所报学科相关基础知识、跨学科相关知识和综合素质。
机械设计创新设计 题目:干粉压片机 学校: 院系:机电学院 专业:工程机械 班级:09级2班 设计者: 指导老师:胡启国 2012年5月 前言 1.1 干粉压片机的概述 干粉压片机是指利用传动系统将电动机的转速降低带动执行机构对粉末物质采取 上下进行加压而成片状。根据干粉压片机的传动系统和执行机构不同,干粉压片机可以分为单片式压片机,旋转式压片机,亚高速旋转式压片机、全自动高速压片机以及旋转式包芯压片机。 干粉压片机的使用行业很广泛。如制药厂、电子元件厂、陶瓷厂、化工原料厂等等,而且压片机还能用来做冲压设备。 压片机在欧美压片机出现的较早。而在国内到1949年,上海市的天祥华记铁工厂仿造成英国式33冲压片机;1951年,根据美国16冲压片机改制成国产18冲压片机,这是国内制造的最早制药机械;1957年,设计制造了ZP25-4型压片机;1960年,自行设计制造成功60-30型压片机,具有自动旋转、压片的功能。同年还设计制造了ZP33型、ZP19型压片机。“七五”期间,航空航天部206所HZP26高速压片机研制成功。1980年,上海第一制药机械厂设计制造了ZP-21W型压片机,达到国际上世纪80年代初的先进水平,属国内首创产品。1987年,引进联邦德国Fette公
司微机控制技术,设计制造了P3100-37型旋转式压片机,具有自动控制片剂重量、压力、自动数片、自动剔除废片等功能,封闭结构严密、净化程度达到GMP要求。1997,年上海天祥健台制药机械有限公司研发了ZP100系列旋转式压片机、GZPK100系列高速旋转式压片机。进入21世纪,随着GMP认证的深入,完全符合GMP的ZP系列旋转式压片机相继出现:上海的ZP35A、山东聊城的ZP35D等。高速旋转式压片机在产量、压力信号采集、剔废等技术上有了长足的发展,最高产量一般都大于300000片/小时,最大预压力20kN,最大主压力80kN或10080kN。譬如,北京国药龙立科技有限公司的GZPLS-620系列高速旋转式压片机、上海天祥健台制药机械有限公司的GZPK3000系列高速旋转式压片机、北京航空制造工程研究所的PG50系列高速旋转式压片机等。随着制造加工工艺水平、自动化控制技术的提高以及压片机使用厂家各种不同的特殊需求,各种特殊用途的压片机也相继出现。譬如,实验室用ZP5旋转式压片机、用于干粉压片的干粉旋转式压片机、用于火药片剂的防爆型ZPYG51系列旋转式压片机等。 国内压片机的现状:(1)压片机规格众多、数量大;(2)操作简单;(3)技术含量较低,技术创新后力不足。国外压片机的现状:高速高产、密闭性、模块化、自动化、规模化及先进的检测技术是国外压片机技术最主要的发展方向。 1.2 干粉压片机的研究现状 1.2.1 压片机动力学分析及力的优化 文献[6]阐述了主加压机构的运动学分析。对机构进行运动学分析可采用图解法分析和解析法分析.在此,我们采用解析法,应用c语言程序进行分析。杆组法运动学分析原理,由机构的组成原理可知,任何平面机构都可分解为原动件、基本杆组和机架三个部分,每一个原动件为一个单杆构件.分别对单杆构件和常见的基本杆组进行运动学分析,并编制成相应的子程序,在对整个机构进行运动分析时,根据机构组成情况的不同,依次调用这些子程序,从而完成对整体机构的运动分析。 文献[10]阐述了各种方案的拟定。根据各功能元的解,动力源可以采用电动机、汽油机、蒸汽透平机、液压机、气动马达等;上下加压则可采用凸轮机构、齿轮机构、连杆机构、液压缸等;送料可采用连杆机构、齿轮机构、槽轮机构等.这样可组合的方案达上百种。 文献[7]阐述了谐响应分析。分析动态响应实际上是解一个完整的动力学方程,它是一个二阶常系数线性微分方程: [M]{x(t)}+[c]{x(t)}+[K]{x(t)}={P(t)} 式中:[M] 、[c]、[K]--质量矩阵、阻尼矩阵和刚度矩阵。x(t)、x(t)、x ( t)--结点的加速度、速度和位移向量,它们均为时间的函数。fP(t)卜一激振力向量,也是时问的函数。谐响应分析是用于确定线性结构在承受随时问按正弦规律变化载荷时稳态响应的一种技术。分析的目的是计算出结构在谐波激振力下的响应,即位移响应与应力响应,并得到系统的动态响应与系统激振力频率的曲线,称为幅频曲线。压片机工作时,冲头和压轮周期性接触,这样就会造成有周期性的激振力作用在整个结构上。当激振力的频率与压片机的固有频率接近时,就会发生共振。共振现象的发生不但不能保证冲压的加工精度,还会对冲头和压轮以致整个机床造成严重破坏,这是一定要避免的。通过以上分析,可以得到以下结论: (1)经过力的优化以后,避免了在第一、二阶固有频率处的共振现象的发生,虽然优化后,第三阶固有频率处的位移比其他频率处较大(1.8xlO4),但小于优化前该频率处的位移(2.1xlO4),更远远小于机器共振时的(1。6x10一),振动量降低了接近1O倍。(2)经过力的优化以后,由于对整体结构不存在激振力,所以一、二、四、五阶振型不会对动态性能产生影响。(3)由于该压片机的实际工作转数在每分钟4O一6O转之间,即工作频率为48 73Hz之间,而优化后在96HZ处振动量较大,远离工作频率范围,所以,机器处于安全良好的工作区域范围,具有良好的动态性能。通过对压片机的模态分析,动力学谐响应分析,得出了压片机在不同工作频率范围下的响应,在此基础上对整体结构进行了力的优化,有效的抑制了共振现象的发生,解决了机器工作时振动和噪音的问题,分析结
第一章绪论 学习要求: 1.明确本课程研究的对象、内容以及在培养机械类高级技术人才全局中的地位、作用和任务. 2.对机械原理的新发展有所了解. 内容提要: 本章讲授的重点是“本课程研究的对象及内容”.在本章的开始,介绍了机器、机构、机械等名词的概念,介绍了机器和机构的用途几区别,并通过实例说明各种机器的主要部分一般都是由各种机构组成的,目的是为了便于介绍本课程研究的对象及内容.在本章的学习中,应始终把注意力集中在了解本课程研究的对象及内容上.此外,对本课程的性质和特点也应有所了解,以便采取合适的学习方法把本课程学好. 机械-人造的用来减轻或替代人类劳动的多件实物的组合体。 原理-机械的组成原理、工作原理、分析和设计原理(方法)等。 任何机械都经历了:简单→复杂的发展过程。 机构-能够用来传递运动和力或改变运动形式的多件实物的组合体。 机器的共有特征: ①人造的实物组合体; ②各部分有确定的相对运动; ③代替或减轻人类劳动完成有用功或实现能量的转换机器的作用. 机器的分类: 原动机-实现能量转换(如内燃机、蒸汽机、电动机) 工作机-完成有用功(如机床等) 工作机的组成: 原动部分-是工作机动力的来源,最常见的是电动机和内燃机。 工作部分-完成预定的动作,位于传动路线的终点。 传动部分-联接原动机和工作部分的中间部分。 控制部分-保证机器的启动、停止和正常协调动作。 第二章机构的结构分析 学习要求: 1.搞清运动副、运动链、约束和自由度等重要概念. 2.能计算平面机构的自由度并判定其具有确定运动的条件. 3.对于一般由平面机构及简单空间机构(包括蜗轮蜗杆机构、圆锥齿轮机构、万向联轴节等)所组成的机械系统,能正确的画出其机构运动简图并计算其自由度. 4.对平面机构组成的基本原理有所了解. 内容提要: 1.机构的组成 ⑴构件构件是机器中每一个独立运动的单元体,是组成机构的基本要素之一,而零件是机器制造的单元体. ①实际的构件可以是一个独立运动的零件,也可以是若干个零件固连在一起的一个独立运动的整体; ②构件是机构中的刚性系统,构件中各零件间不能相对运动; ③构件的图形在表达上是用最简单的线条或几何图形来表示. ⑵运动副运动副是由两构件直接接触而组成的可动的连接,是组成机构的又一基本要素.而把两构件上能够参加接触而构成运动副的表面称为运动副元素. 运动副的基本特征为:
昆明理工大学2010年硕士研究生招生入学考试试卷(A卷) 考试科目代码:810 考试科目名称:机械原理 试卷适用招生专业:080201机械制造及其自动化、080202机械电子工程、080203机械设计及理论、080204车辆工程、430102机械工程 考生答题须知 1.所有题目(包括填空、选择、图表等类型题目)答题答案必须做在考点发给的答题纸上,做在本试卷册上无效。 请考生务必在答题纸上写清题号。 2.评卷时不评阅本试卷册,答题如有做在本试卷册上而影响成绩的,后果由考生自己负责。 3.答题时一律使用蓝、黑色墨水笔或圆珠笔作答(画图可用铅笔),用其它笔答题不给分。 4.答题时不准使用涂改液等具有明显标记的涂改用品。
2、试求机构在图示位置的全部瞬心。(10分) 3、标出图示位置时凸轮机构的压力角,凸轮从图示位置转过90度后推杆的位移。(10分) 四、(15分,所有考生做)计算图示机构的自由度,若有复合铰链、局部自由度和虚约束,请指出。 五、计算题 A B C 2 3 1 4
1、在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电动机的转速 m in /14451r n =,求带轮转速的大小和方向。 (10分,所有考生做) 2、已知一渐开线规范外啮合圆柱齿轮机构,其模数mm m 10=,中心距mm a 350=,传动比 5/912=i ,试计算该齿轮机构的几何尺寸(各轮的齿数、分度圆直径、齿顶圆直径、齿根圆直径、 齿厚)。(16分,所有考生做) 3、在图示的轮系中,已知各轮的齿数20,50,40,60,2536421======z z z z z z (右旋) ,且各轮均为正确安装的规范齿轮,各齿轮的模数相同。当轮1以900r/min 按图示方向转动时,求轮6转速的大小和方向。 (全日制学术型,15分)
机械原理课程设计剪板机设计说明书 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
机械原理课程设计说明书设计题目剪板机 成员 指导教师 2014年7月18日
前言 一.原始数据及设计要求 设计一剪板机械,主要功能是能将卷料展开并剪成一定长度的铁板,即将板料作定长度的间歇送进,在板料短暂的停歇时间内,剪刀在一定位置上将铁板剪断。设计要求:原材料为成卷的板料。每次输送铁板长度为2000mm;每次输送铁板到达规定长度后,铁板稍停,以待剪板机构将其剪断。剪断工艺所需时间约为铁板输送周期的十五分之一,铁板停歇时间不超过剪断工艺时间的倍,;输送机构运转应平稳,振动和冲击应尽量小。 剪板频率为30次/分钟。 二.项目组成员及分工 目录 一.选题意义 (1)
二.原理分析 (2) 三.设计方案及选择 (3) 设计方案分析 (3) 设计方案选择 (3) (3) (5) 四.选用机构的尺寸设计 (7) 机构自由度计算 (7) 间歇传动轮系的直径与转速的确定 (7) (7) (7) 剪断传动机构的尺寸确定 (9) (9) (10) 五.选定机构的运动分析 (14) 位移分析 (14) 速度分析 (14)
加速度分析 (16) 机构运动循环 图 (18) 六.心得体会 (19) 七.参考文献 (22) 八.附录 (23)
一.选题意义 剪板机常用来剪裁直线边缘的板料毛坯。剪切能保证被剪板料剪切表面的直线性和平行度要求,并减少板材扭曲,以获得高质量的工件。板金行业的下料剪切工具,广泛适用于机械工业,治金工业,等各种机械行业,主要作用就是用于金属剪切在使用金属板材较多的工业部门,都需要根据尺寸要求对板材进行切断加工,所以剪板机就成为各工业部门使用最为广泛的板料剪断设备。 二.原理分析 剪板机分为送料机构,剪断机构,卸料机构三个部分,由一台电动机为机器提供动力。送料机构可以应用两个夹紧的皮带轮将卷状的板料加为直板。而剪断机构可以利用齿轮传动与杆件的联合传动带动刀具剪切钢板,并通过齿轮的变传动比使刀具达到规定的剪切频率。卸料机构则只需要皮带轮将剪切完成的铁板送之规定地点即可。 三.设计方案与选择 设计方案分析 铁板作间歇送进的机构方案设计,可从下述两个方面考虑机构的选择: ⑴、如何夹持和输送铁板,并使停歇时保持铁板的待剪位
中国石油大学(华东) 学术学位博士(含直攻博)研究生培养方案 学科名称:机械工程学科代码:0802 一、学位授权点简介 本机械工程学位授权点1961年开始招收研究生,1981年获硕士学位授予权,1986年获博士学位授予权,2010年获博士后科研流动站,2011年获一级学科博士授权点。机械电子工程、机械设计及理论2个二级学科为山东省重点学科,机械工程学科为青岛市重点学科。建有有国家级和省部级科研平台12个。具有海洋油气装备工程、机械制造及其自动化等5 个学科方向,本学位点已成为我国油气机电装备领域等重要的科学研究和高层次人才培养基地。近年来本学位点所培养的博士研究生先后荣获全国优秀博士学位论文提名奖,上银优秀机械博士论文奖铜奖和优秀奖,入选英国玛丽居里学者和牛顿学者、德国洪堡学者、香江学者等。 二、培养目标 面向机械和石油等行业的发展需求,围绕现代机电装备的重要基础理论与关键技术问题等开展研究生的培养工作。把立德树人作为研究生教育的根本任务,培养德智体美劳全面发展,具备较强的批判性思维和创新性思维,能够独立从事科学研究工作并做出创造性的学术研究成果,具有国际视野的高层次研究型人才和未来领导者。 三、基本要求 1.品德素质:遵纪守法、品行端正、诚实守信、身心健康,有社会责任感和团队合作精神。恪守学术道德,崇尚学术诚信,热爱科学研究。具有严谨的科研作风和锲而不舍的钻研精神。 2.知识结构:适应科技进步和经济社会发展的需要,掌握本学科坚实宽广的基础理论和系统深入的专门知识,深入了解本学科发展方向及国际学术研究前沿。 3.基本能力:掌握机械工程领域科学研究的先进方法,能熟练地应用
学术之星 为了营造积极健康的校园学术氛围,充分展示我校广大研究生学术科研能力和科技创新成果,研究生学院研究生创新中心于2011年10月13日—11月13日举办了第四届研究生“学术之星”评选活动。活动旨在表彰积极参与科研的优秀研究生,激励其在学术上勇于攀登、积极创新、与时俱进的精神,以激发广大研究生的科研热情,提高我校研究生的学术水平。在此次评选活动中,涌现出了大量科技创新成果,充分彰显了我校研究生学术科研能力和学术创新精神。经过层层筛选,最终评选出七位学术之星,为我校广大研究生树立了学习榜样。现将学术之星及其研究成果予以公示: (1)刘家顺土木与交通学院 刘佳顺,男,团员,土木与交通学院2009级硕士研究生,研究方向为环境岩土工程。攻读硕士期间共发表论文9篇,其中国内核心期刊6篇,国内一般刊物1篇,会议论文集2篇,ISTP收录2篇。参与了辽宁省优秀人才计划《风积土冻胀与融沉特性及其工程防治措施的研究》、横向课题《辽西地区钢筋混凝土钢架拱桥加固技术研究》和《辽西地区T型梁桥加宽加固工程技术研究》三项,纵向课题《高速铁路风积土路基的振(震)陷变形试验研究》和《冻融和渗流耦合作用下风积土路基结构性演变的研究》两项。 张向东,教授,1983年毕业于辽宁工程技术大学(原阜新矿业学院),获工学学士学位;1986年毕业于东北大学(原东北工学院),获工学硕士学位;1997年毕业于东北大学资源与土木工程学院,获工学博士学位。现为辽宁工程技术大学岩土工程学科带头人,土木与交通学院院长和岩土工程研究所所长,为辽宁省中青年骨干教师、辽宁省"百千万人才工程"百人层次人选、中国岩石力学与工程学会东北分会理事、中国岩石力学与工程学会地面岩石工程专业委员会委员、中国煤炭学会矿井建设专业委员会委员、辽宁省土木建筑工程学会理事。
机械原理课程设计说明书题目:垫圈内径检测装置 设计人: 学号: 班级:
目录 一、设计题目及设计要求 (3) 二、题目分析 (4) 三、机构设计、尺寸设计及其计算 (5) 3.1 推料机构(其中有平面连杆机构和齿轮系的设 计) (6) 3.2控制止动销的止动机构(其中有平面连杆机构,凸轮机构, 齿轮系的设计) (7) 3.3压杆升降机构的设计(其中有平面连杆机构,凸轮机构,齿轮系的设计) (9) 四、运动方案简介 (13) 4.1 垫圈内径检测装置的传动系统及其传动比分配的确 定 (13) 4.2 机构运动方案简图和运动循环图 (14) 4.3 从动件运动规律线图及凸轮轮廓线图 (14) 五、系统评价 (14) 六、设计小结 (15) 七、参考书目 (16)
一、设计题目及设计要求 设计垫圈内径检测装置,检测钢制垫圈内径是否在公差允许范围内。被检测的工件由推料机构送入后沿一条倾斜的进给滑道连续进给,直到最前边的工件被止动机构控制的止动销挡住而停止。然后,升降机构使装有微动开关的压杆探头下落,检测探头进入工件的内孔。此时,止动销离开进给滑道,以便让工件浮动。 检测的工件过程如图1所示。当所测工件的内径尺寸符合公差要求时(图1a),微动开关的触头进入压杆的环行槽,微动开关断开,发出信号给控制系统,在压杆离开工件后,把工件送入合格品槽。如工件内径尺寸小于合格的最小直径时(图1b),压杆的探头进入内孔深度不够,微动开关闭合,发出信号给控制系统,使工件进入废品槽。如工件内径尺寸大于允许的最大直径时(图1c),微动开关仍闭合,控制系统将工件送入另一废品槽。
机械原理复习题 00绪论 一、简答题 1、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么? 2、机器与机构有什么异同点? 3、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。 二、填空题 1、机器或机构,都是由组合而成的。(构件) 2、机器或机构的之间,具有确定的相对运动。(构件) 3、机器可以用来人的劳动,完成有用的。(代替机械功) 4、组成机构、并且相互间能作的物体,叫做构件。(相对运动) 5、从运动的角度看,机构的主要功用在于运动或运动的形式。(传递转换) 6、构件是机器的单元。零件是机器的单元。(运动制造) 7、机器的执行部分须完成机器的动作,且处于整个传动的。(预定终端) 8、机器的传动部分是把原动部分的运动和功率传递给执行部分的。(中间环节) 9、构件之间具有的相对运动,并能完成的机械功或实现能量转换 的的组合,叫机器。(确定有用构件) 三、判断题 1、构件都是可动的。(√) 2、机器的传动部分都是机构。(√) 3、互相之间能作相对运动的物件是构件。(√) 4、只从运动方面讲,机构是具有确定相对运动构件的组合。(√) 5、机构的作用,只是传递或转换运动的形式。(×) 6、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。(√) 7、机构中的主动件和被动件,都是构件。(√) 03平面机构的自由度和速度分析 一、简答题 1、什么是运动副?运动副的作用是什么?什么是高副?什么是低副? 2、平面机构中的低副和高副各引入几个约束? 3、机构自由度数和原动件数之间具有什么关系? 4、用机构运动简图表示你家中的缝纫机的踏板机构。 5、计算平面机构自由度时,应注意什么问题?
第一章绪论 基本概念:机器、机构、机械、零件、构件、机架、原动件和从动件。 第二章平面机构的结构分析 机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。 1. 机构运动简图的绘制 机构运动简图的绘制是本章的重点,也是一个难点。 为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。 2. 运动链成为机构的条件 判断所设计的运动链能否成为机构,是本章的重点。 运动链成为机构的条件是:原动件数目等于运动链的自由度数目。 机构自由度的计算错误会导致对机构运动的可能性和确定性的错误判断,从而影响机械设计工作的正常进行。 机构自由度计算是本章学习的重点。 准确识别复合铰链、局部自由度和虚约束,并做出正确处理。 (1) 复合铰链 复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。 正确处理方法:k个在同一处形成复合铰链的构件,其转动副的数目应为(k-1)个。 (2) 局部自由度 局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。局部自由度常发生在为减小高副磨损而增加的滚子处。 正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。 (3) 虚约束 虚约束是机构中所存在的不产生实际约束效果的重复约束。 正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。 虚约束都是在一定的几何条件下出现的,这些几何条件有些是暗含的,有些则是明确给定的。对于暗含的几何条件,需通过直观判断来识别虚约束;对于明确给定的几何条件,则需通过严格的几何证明才能识别。 3. 机构的组成原理与结构分析 机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。 第三章平面机构的运动分析 1.基本概念:速度瞬心、绝对速度瞬心和相对速度瞬心(数目、位置的确定),以及“三心定理”。 2.瞬心法在简单机构运动分析上的应用。 3.同一构件上两点的速度之间及加速度之间矢量方程式、组成移动副两平面运动构件在瞬时重合点上速度之间和加速度的矢量方程式,在什么条件下,可用相对运动图解法求解? 4.“速度影像”和“加速度影像”的应用条件。 5.构件的角速度和角加速度的大小和方向的确定以及构件上某点法向加速度的大小和方向的确定。 6.哥氏加速度出现的条件、大小的计算和方向的确定。 第四章平面机构的力分析 1.基本概念:“静力分析”、“动力分析”及“动态静力分析” 、“平衡力”或“平衡力矩”、“摩擦角”、“摩擦锥”、“当量摩擦系数”和“当量摩擦角”(引入的意义)、“摩擦圆”。 2.各种构件的惯性力的确定: ①作平面移动的构件; ②绕通过质心轴转动的构件;
课程设计说明书 设计题目:工件间歇输送机构 专业:机械设计制造及其自动化 班级: 设计人: 指导老师: 2011 年 7 月 6 日 课程设计说明书 学院专业班级
一、课程设计题目:工件间歇输送机构 二、课程设计主要参考资料 [1] 课程设计指导书 [2] 安子军机械原理[M].7版. 国防工业,2009 [5] 成大先. 机械设计手册[M].化学工业 2010 三、课程设计应解决主要问题 (1)通过机构设计满足间歇输送工件的运动要求 (2)优化结构设计,提高可行性以及机构工作的稳定性 四、成员分工 方案一: 方案二: 方案三: 四、课程设计相关附件(如:图纸、软件等) (1)A2构件图 (2)课程设计说明书一份 (3)方案构件图三份 3D仿真图三
目录 1 课程设计任务 (3) 1.1设计题目 (3) 1.2设计要求 (3) 2机械系统运动功能系统图 (4) 2.1机器的功能和设计要求 (4) 2.2工作原理和工艺动作分解 (4) 2.3根据工艺动作顺序和协调要求拟定运动循环图 4 2.4 机构选型 5 2.5机械运动方案的选择和判定 5 3系统方案拟定与比较 (4) 3.1方案一 (5) 3.2方案二 (8) 3.3方案三 (13) 3.4方案比较 (16) 3.5方案选择 17 4心得 17
1 课程设计任务 1.1设计题目 工件间歇输送机构 1.2设计要求 输送机主要由动力机构、间歇机构、传动机构组成。如图一所示,电动机输入动力,带动传动机构,通过间歇机构实现工件的间歇输送。 图1 间歇输送机构工作示意图
2机械系统运动功能系统图 2.1机器的功能和设计要求 由于机器加工的与产品的流水线效率的需要,间歇式传动显得必不可少!本设计旨在针对需间歇式传动的机构而设计的步长为840mm的各种方案,为其他机械提供基础。 设计要求:步长为840mm的间歇式传动 2.2工作原理和工艺动作分解 若需完成840mm间歇式传动,必须要经过的三个步骤 1. 四级电动机n=1500r|min的输出机构 2. 将高转速的电机速度通过合理的减速机构,使之达到需求的转速 3. 低转速的输出机构,并使物体能够840mm间歇式移动 2.3根据工艺动作顺序和协调要求拟定运动循环图
机械原理知识点总结 第一章平面机构的结构分析 (3) 一. 基本概念 (3) 1. 机械: 机器与机构的总称。 (3) 2. 构件与零件 (3) 3. 运动副 (3) 4. 运动副的分类 (3) 5. 运动链 (3) 6. 机构 (3) 二. 基本知识和技能 (3) 1. 机构运动简图的绘制与识别图 (3) 2.平面机构的自由度的计算及机构运动确定性的判别 (3) 3. 机构的结构分析 (4) 第二章平面机构的运动分析 (6) 一. 基本概念: (6) 二. 基本知识和基本技能 (6) 第三章平面连杆机构 (7) 一. 基本概念 (7) (一)平面四杆机构类型与演化 (7) 二)平面四杆机构的性质 (7) 二. 基本知识和基本技能 (8) 第四章凸轮机构 (8) 一.基本知识 (8) (一)名词术语 (8) (二)从动件常用运动规律的特性及选用原则 (8) 三)凸轮机构基本尺寸的确定 (8) 二. 基本技能 (9) (一)根据反转原理作凸轮廓线的图解设计 (9) (二)根据反转原理作凸轮廓线的解析设计 (10) (三)其他 (10) 第五章齿轮机构 (10) 一. 基本知识 (10) (一)啮合原理 (10) (二)渐开线齿轮——直齿圆柱齿轮 (11) (三)其它齿轮机构,应知道: (12) 第六章轮系 (14) 一. 定轴轮系的传动比 (14) 二.基本周转(差动)轮系的传动比 (14)
三.复合轮系的传动比 (15) 第七章其它机构 (15) 1.万向联轴节: (15) 2.螺旋机构 (16) 3.棘轮机构 (16) 4. 槽轮机构 (16) 6. 不完全齿轮机构、凸轮式间歇运动机构 (17) 7. 组合机构 (17) 第九章平面机构的力分析 (17) 一. 基本概念 (17) (一)作用在机械上的力 (17) (二)构件的惯性力 (17) (三)运动副中的摩擦力(摩擦力矩)与总反力的作用线 (17) 二. 基本技能 (18) 第十章平面机构的平衡 (18) 一、基本概念 (18) (一)刚性转子的静平衡条件 (18) (二)刚性转子的动平衡条件 (18) (三)许用不平衡量及平衡精度 (18) (四)机构的平衡(机架上的平衡) (18) 二. 基本技能 (18) (一)刚性转子的静平衡计算 (18) (二)刚性转子的动平衡计算 (18) 第十一章机器的机械效率 (18) 一、基本知识 (19) (一)机械的效率 (19) (二)机械的自锁 (19) 二. 基本技能 (20) 第十二章机械的运转及调速 (20) 一. 基本知识 (20) (一)机器的等效动力学模型 (20) (二)机器周期性速度波动的调节 (20) (三)机器非周期性速度波动的调节 (20) 二. 基本技能 (20) (一)等效量的计算 (20) (二)飞轮转动惯量的计算 (20)
机械设计及理论 080203 (一级学科:机械工程) 机械设计及理论是研究机械科学中具有共性的基础理论和设计方法的学科,原名为机械学学科。本学科1982年获得硕士学位授予权,2000年获得博士学位授予权。随着科学技术的不断发展,动态设计、优化设计、可靠性设计、有限元设计、智能设计、虚拟设计、计算机辅助设计、创新设计等现代化设计方法完善和发展了传统的设计理论与设计方法。机械学科与仿生学、电子学、控制理论、信息学、生物学、材料科学等许多种学科相互交叉、渗透,形成了多种与机械学科密切相关的边缘学科。与其它学科的相互交叉、渗透、融合,促进了机械设计及理论学科的新发展。 本学科的主要研究方向如下。 1.机构学与机器人机械学:平面机构及空间机构的分析与综合理论,机构组合理论,机构创新设计理论与方法,广义机构与仿生机构,空间并联机构,机器人机械学与仿真技术,数学机械化在机器人与机械设计中的应用。 2.机械传动与摩擦学:机械传动理论、设计方法,传动系统故障监控与诊断,机械传动仿真技术,摩擦、磨损和润滑机理,摩擦学理论与设计,摩擦学测试技术,流体润滑技术与应用,特殊轴承润滑。 3.机械系统运动学与动力学:机械系统的动力学模型与动态仿真,液压系统、机械振动分析与控制,模态分析与动态测试、减振降噪。振动与冲击理论在车辆、航天器、飞行器中的应用。 4.运动生物力学:机构学、生物学、力学、医疗学交叉、渗透形成的边缘学科,涉及到人体结构、功能,人体的运动学、动力学、动态测试与分析、人机工程;主要研究冲击与振动环境下的人体安全与防护问题。 5.计算机图形图像学:计算机图形图象处理的基本理论,包括图形算法、图象处理、仿真显示、可视化,图形库。图像技术在微观材料、复杂形体、运动形体的应用。 一、培养目标 硕士研究生应热爱祖国,热爱人民,有道德、开拓进取,具有严谨的学风。在本学科上掌握坚实的基础理论和系统的专门知识,具有从事科学研究工作和独立担负专门技术工作的能力。成为机械设计及理论领域内适合21世纪经济发展的、学术型、应用型的复合型高级技术人才。 二、课程设置
(2)水平面内转30度,手臂自转90度,前进50mm。
机械手的夹持器还有夹紧和放松动作; 机械手工作频率:20/min; 升降 0.3kw,摆动 0.1kw,伸缩 0.1kw,夹持 0.2kw。2执行机构的选择与比较 §2-1 转角机构(实现平面转角0 30功能) 方案一 实现平面转角0 30的过程:电机带动不完全 齿轮运动,不完全齿轮带动全齿轮运动,与全 齿轮固结的四杆机构,使滚子在预先设计好形 状的槽内运动,左右运动的极限位置恰好是30 度。 机构评价: 优点:因为槽的形状固定,所以能保证在一个 行程内,机构的平面转角就是30度。 不完全齿轮的使用,为机械手在抓放物 体时留下了工作时间。 缺点:由于四杆机构的运动被槽限制住,最短杆 无法做周转运动,导致机构的回程要求齿 轮的翻转,必须在前面加入变速箱改变速 度方向。 方案二 实现平面转角0 30的过程:皮带轮传动给蜗 轮蜗杆从而使不完全齿轮,有间歇地带动完全齿 轮转动,齿轮通过杆拉动齿条,由齿轮来回往复 地带动固接杆转动0 30 机构评价: 优点:同样具有结构简单,传力较小运 动灵活,造价低准确地实现转角0 30的 要求,可以控制间歇实现循环功能。 缺点:磨损较严重,效率较低,齿轮尺 寸过大加工难。 方案三 30的过程:使用槽 实现平面转角0 轮实现平面转角30度,只要计算好槽轮 的槽数,就能在主动圆盘转360度时, 使从动轮转30度。机构评价: 优点:结构简单,外形尺寸小,机械效
率高,并能平稳的间歇地进行转位。 缺点:传动存在柔性冲击,且是单向的间歇运动,同样要求变速箱改变运动方向。 方案的选择与比较: 只有第二个方案能较好的实现对传动系统的功能要求在平面转动上能准确地控制在30度,制造简单方便。 §2-2 上升机构(实现上升100功能要求) 方案一 实现上升的过程:皮带轮传动,使蜗杆带动蜗轮,蜗轮和齿条配合。通过控 制蜗杆的半径,使转动一周后,使齿条上升100. 机构评价: 优点:蜗杆的轮齿是连续的螺旋尺,故传动平 稳,啮合冲击小。 缺点:啮合齿轮间的相对滑动速度较大,摩擦 磨损较大,传动效率较低,易出现发热 现象,常用耐磨材料制作,成本高。 方案二 实现上升的过程:皮带轮传动给蜗轮蜗杆 从而使凸轮转动,凸轮通过顶杆推动滑块滑 动,从而使工作杆上升100mm。 机构评价: 优点:结构简单,传力较小,凸轮不用太大就 可以达到所需要的高度。 缺点:效率过低,滑块容易磨损且一旦磨断严重影响上升高度,寿命不高。
机械原理期末总复习
书中十五选十答案 一:Many people who are traditionally afraid of DIY are becoming (1G plague 2J renovations 3E recession 4A decorating 5O fabulous 6N obstacle 7K potential 8I blunder 9M disastrous 10H neglected) 二:Recently,the right of privacy seems to be frequently under (1G assault 2C probe 3N resented 4A disregard 5K skeletons 6J wealthy 7D abolish 8O elaborate 9M incredibly 10Bprevalent) 三:One way to make a marriage work is by being (1C unselfish 2F willing 3H rinse 4A bet 5L pasture 6N treat 7G wore 8J accuse 9K vexes 10E intimate) 四:Many Americans think creative is an inherent gift (1F cultivated 2K turbulent 3B quotas 4G preventing 5C abortive 6H modification 7D springboards 8N conceive 9J rolled 10O prejudices) 五:Although young people today can remember 150 (1N management 2I amounts 3A inadequate 4G surprise 5F educated 6B budgeting 7L infrequently 8O surveyed 9J semester 10E attributing) 六: when I was young , I lived in Fort Greene which was notorious 1C bother 2K vaguely 3G trailed 4A sneered 5E entered 6L exactly 7J gentrifying 8N indisputable 9I transformed 10M exceedingly 七:While some of us say they don’t want to 1M emotional 2B achievement 3E outstanding 4N conscientiousness 5O propel 6L toxic 7D expediency 8C detached 9A strategy 10K apt 书中课后题答案 Unit 1 A. Fill in the blanks with the wor ds given below. Change the form whe re necessary. internal ditch fabulous renovate plaster amateur blunder in
机械设计发展史 姓名:XXX 学号:XXXXX 专业:XXXXXXX 【摘要】:设计必须科学化,这意味着要科学地阐述客观设计过程及其本质,分析与设计有关的领域及其单位,在些基础上,科学地安排设计过程,使用科学的方 法和手段进行设计。同时也要求设计人员不光有丰富的专业知识,而且也要 掌握先进的设计理论,设计方法及设计手段,科学地进行设计工作,这样才 能及时得到符合要求的产品。 【关键字】:机械设计、古代机械设计、近代机械设计、现代机械设计、机械学 前言 设计一词的英语为Design,它源于拉丁语Designar,由De(记下)与Signare(符号,记号,图形等)两词组成。因此,“设计"的最初含义是将符号、记号、图形之类记下来的意思。随着生产的发展和科技的进步,设计的内涵不断向深度和广度发展,设计的含义越来越深刻和越来越先进。设计是人类改造自然的基本的活动之一,设计是复杂的思维过程,设计过程蕴含着创新和发明的机会。设计的目的是将预定的目标,经过一系列的规划与分析决策产生一定的信息(文字,数据,图形)形成设计,并通过制造,使设计成为产品,造福人类。 1 机械设计发展的三个阶段 机械设计的发展史按时间来分,可分为三个阶段,分别是:从古代社会到17世纪为机械设计起源和古代机械设计阶段,由17世纪至第二次世界大战结束为近代机械设计,第二次世界大战结束直到现在为现代设计阶段。如果按其内容来分,可分为:直觉设计阶段,经验设计阶段和理论设计阶段。两种划分是一一对应的,是从不同角度来划分机械设计的发展史。每一个阶段在设计理论,方法和制造工艺方面都有明显的特色。下面就按时间来划分,把机械设计发展史划分为三个阶段来论述。 (1)机械设计起源和古代机械设计 在我国古代,机械发明、设计者与制造者是统一的。有许多著名的人物,他们的成果代表了当时我国的机械的设计水平。唐代的时侯我国与许多国家开展了经济、文化和科学技术的交流,与东南亚、南亚、阿拉伯、非洲东海岸贸易频繁,对中国和世界其它的一些国家有很大的影响。由于贸易的发展,要求商品增加,从而改进生产设备,使机械设计有了很大的发展,造纸、纺织、农业、矿业、陶瓷、印染、兵器等都有了新的进展,机械设计水平也提高了一大步,宋代沈括的著作《梦溪笔谈》记载了当时的许多科学成就,反映了当时的科学水平。 世界其它的国家也有不少机械的成果,但这些设计多是凭设计者的经验完成的缺乏必要的,有一定精度的理论的计算。 (2)近代机械设计 17世纪欧洲的航海、纺织、钟表等工业的兴起,提出了许多技术部题,1644年英国组成了“哲学学院”,德国成立了实验研究会和柏林学会,1666年,法国、意大利也成立了研究机构。在这些机构中工作的意大利人伽利略(1564--1642)发表了自由落体定律、惯性定律、抛物体运动,还进行过梁的弯曲实验;英国人牛顿提出了运动的三大定律,1688年,他提出了计算流体粘度的阻力的公式,奠定了古典力学的基础;英国人虎克建立了在一定范围内弹性体的应力 - 应变成正比的胡克定律;1705年伯努利提出了梁弯曲的微分方程式,
一、课程设计的意义、内容及步骤 随着生产技术的不断发展,机械产品种类日益增多,对产品的机械自动化水平也越来越高,因此,机械设备设计首先需要进行机械运动方案的设计和构思、各种传动机构和执行机构的选用和创新设计。本指导书旨在根据高校工科本科《机械原理课程教学基本要求》的要求:结合一个简单的机械系统,综合运用所学理论和方法,使学生能受到拟定机械运动方案的初步训练,并能对方案中某些机构进行分析和设计,针对某种简单机器(即工艺动作过程较简单)进行机构运动简图设计。 设计过程指从明确设计任务到编制技术文件为止的整个设计工作的过程,该过程一般来讲包括四个阶段:1)明确设计任务和要求;2)原理方案设计;3)技术设计;4)施工设计。本次设计的主要内容主要完成前两个任务,完成的步骤如下; 二、机械原理课程设计的基本要求 1.设计结果体现创新精神。 2.方案设计阶段以小组为单位,组织学生参观讨论,分析机器的结构、传动方式、工 作原理,给出至少两种运动方案,并对其进行比较,从中选出最优方案。 3.方案确定以后,进行机构尺寸综合和机构运动分析时,每个学生的参数不同,独自 设计。若发现尚未达到工作要求,应审查方案,调整机构的尺寸,重新进行设计。 4.每个学生绘制一张图纸,应包括机械系统运动方案简图和机械运动循环图,一两个 主要机构的运动分析及设计程序。 5.写一份设计说明书,最后进行答辩。 6.成绩的评定。课程设计的成绩单独评定。应以设计说明书、图样和在答辩中回答问 题的情况为依据,参考设计过程中的表现,由指导教师按五级计分制(优、良、中、及格、不及格)进行评定。 二、机械运动简图设计内容 1.功能分解 机器的功能是多种多样的,但每一种机器都要完成某一工艺动作过程。将机械所需完成的工艺动作过程进行分解,即将总功能分解为多个功能元,在机械产品中就是将工艺动作过程分解为若干个执行动作。设计者必须把动作过程分解为几个独立运动的分功能,然后用树状功能图来描述,使机器的总的功用及各分功能一日了然。 例如,设计一部四工位专用机床,它可以分解成如下几个工艺动作: