《现代电路理论与设计》课程实验报告
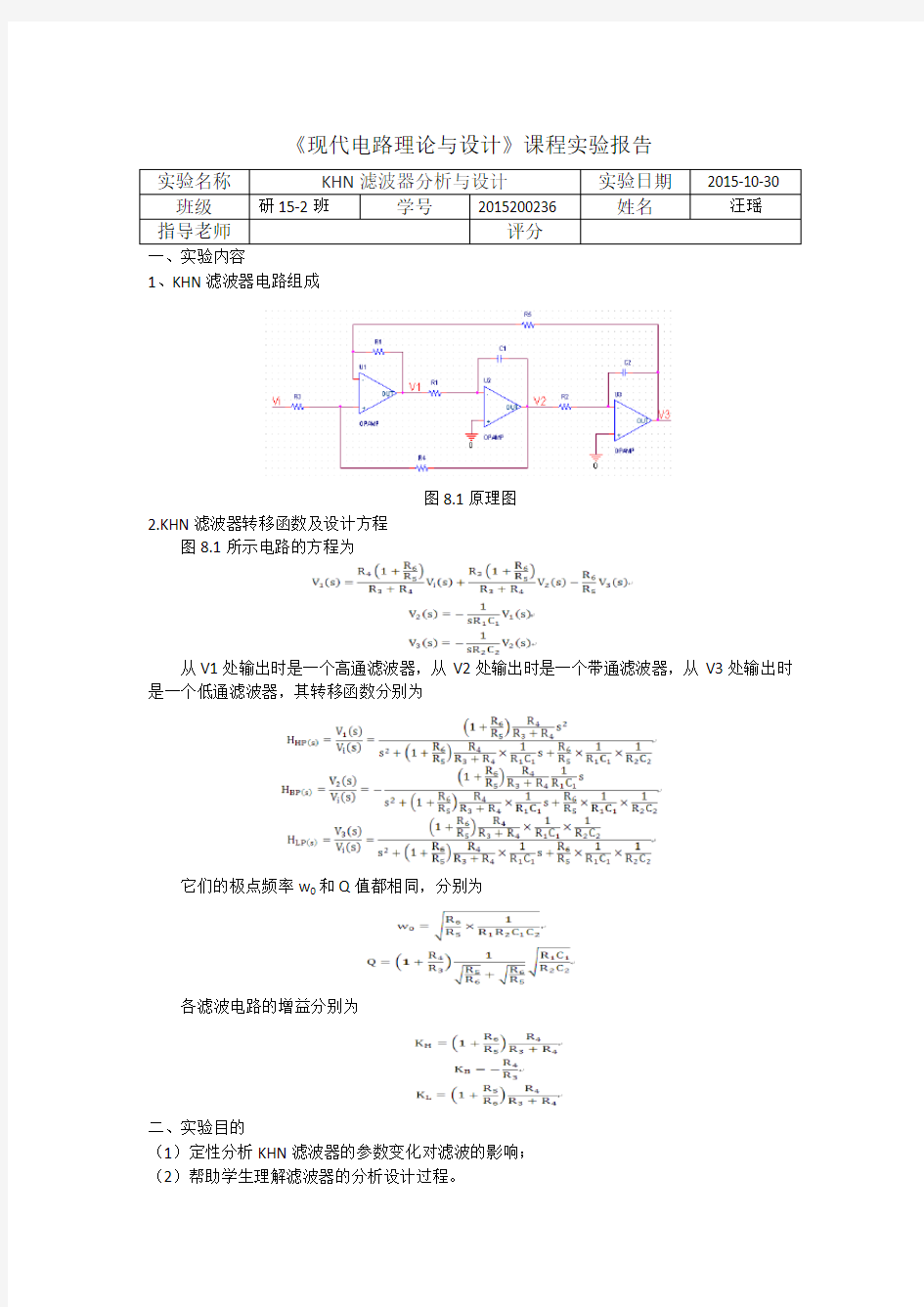
1、KHN滤波器电路组成
图8.1原理图
2.KHN滤波器转移函数及设计方程
图8.1所示电路的方程为
从V1处输出时是一个高通滤波器,从V2处输出时是一个带通滤波器,从V3处输出时是一个低通滤波器,其转移函数分别为
它们的极点频率w0和Q值都相同,分别为
各滤波电路的增益分别为
二、实验目的
(1)定性分析KHN滤波器的参数变化对滤波的影响;
(2)帮助学生理解滤波器的分析设计过程。
三、实验过程
1、理论计算
为了方便分析计算
①取C1=C2=C=10nF,R1=R2=R3=R4=R5=R6=R=100k。
②由计算公式求得,wp=1000rad/s,Q=1,
2、仿真步骤
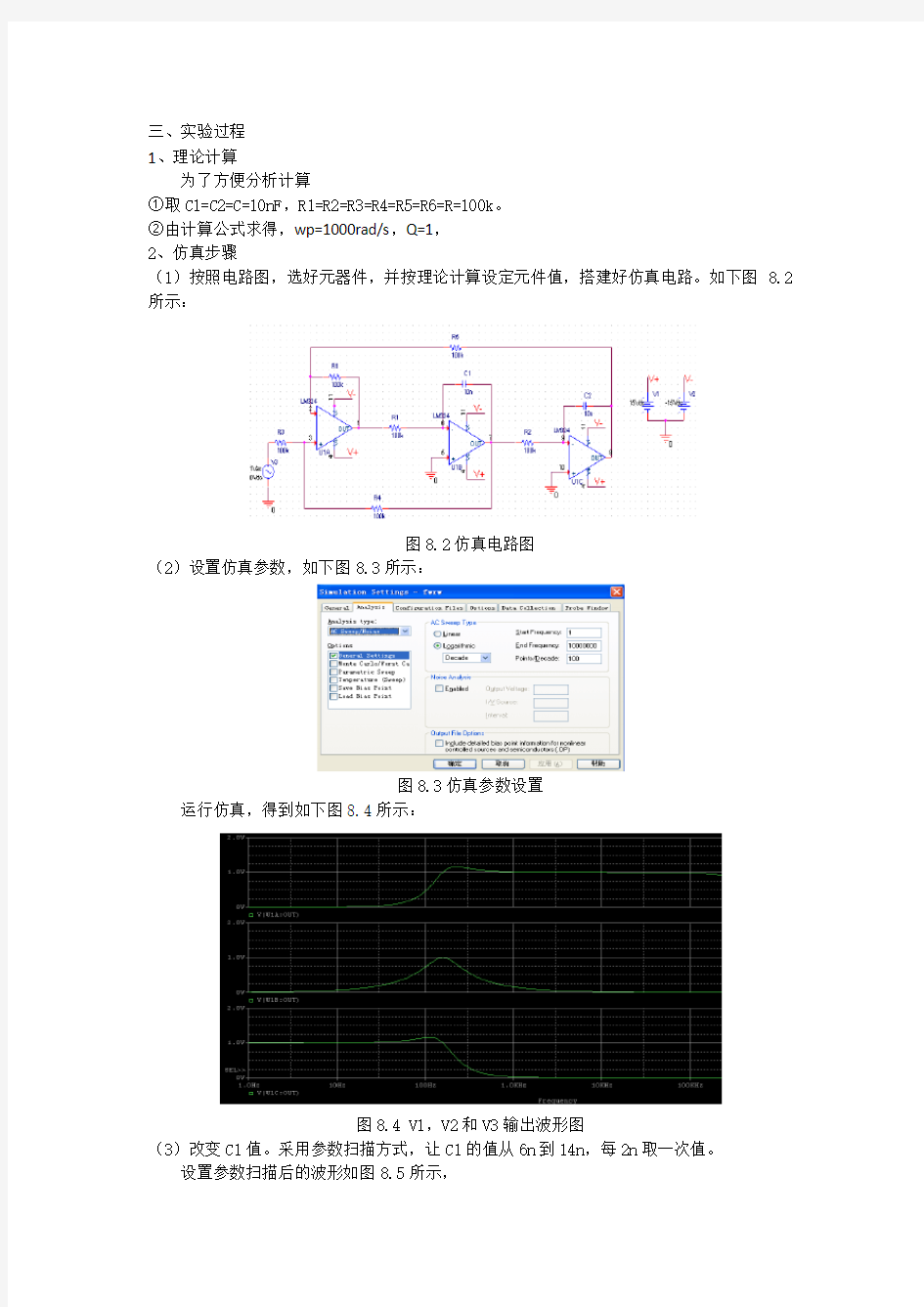
(1)按照电路图,选好元器件,并按理论计算设定元件值,搭建好仿真电路。如下图8.2所示:
图8.2仿真电路图
(2)设置仿真参数,如下图8.3所示:
图8.3仿真参数设置
运行仿真,得到如下图8.4所示:
图8.4 V1,V2和V3输出波形图
(3)改变C1值。采用参数扫描方式,让C1的值从6n到14n,每2n取一次值。
设置参数扫描后的波形如图8.5所示,
图8.5改变参数C1的波形变化
(4)改变C2值。采用参数扫描方式,让C2的值从6n到14n,每2n取一次值。设置参数扫描后的波形如图8.6所示
图8.6改变参数C2的波形变化
(5)改变R1值。采用参数扫描方式,让R1的值60k到140k,每20k取一次值。设置参数扫描后的波形如图8.7所示
图8.7改变参数R1的波形变化
(6)改变R2值。采用参数扫描方式,让R2的值从60k到140k,每20k取一次值。设置参数扫描后的波形如图8.8所示
图8.8改变参数R2的波形变化
(7)改变R3值。采用参数扫描方式,让R3的值从60k到140k,每20k取一次值设置参数扫描后的波形如下图8.9所示
图8.9改变参数R3的波形变化
(8)改变R4值。采用参数扫描方式,让R4的值从60k到140k,每20k取一次值设置参数扫描后的波形如下图8.10所示
图8.10改变参数R4的波形变化
(9)改变R5值。采用参数扫描方式,让R5的值从60k到140k,每20k取一次值设置参数扫描后的波形如下图8.11所示
图8.11改变参数R5的波形变化
(10)改变R6值。采用参数扫描方式,让R6的值从60k到140k,每20k取一次值设置参数扫描后的波形如下图8.12所示
图8.12改变参数R6的波形变化
四、实验结果分析
由图8.4可看出,KHN滤波器可以实现高通滤波和带通滤波以及低通滤波三种滤波方式,我们可以根据需要,选择不同的输出端口,来实现不同的滤波功能。
由图8.5可看出,随着电容C1的值由小变大,高通功能端口的输出波形,Q值逐渐增大,过度带减小明显;带通功能端口的输出波形,中心频率逐渐减小,通带宽变窄,且高频段变化更为明显;低通功能端口的输出波形,截止频率变化不是很大,Q值逐渐增大,波形的过渡带明显减小。
由图8.6可看出,随着电容C2的值由小变大,高通功能端口的输出波形,Q值逐渐减小,过度带随之增大;带通功能端口的输出波形,中心频率逐渐减小,通带宽变宽,且低频段变化更为明显;低通功能端口的输出波形,截止频率明显减小,Q值也逐渐减小,过渡带也随着增大。
由图8.7可看出,随着电阻R1的值由小变大,高通,带通,低通功能端口的输出波形,变化规律同改变C1相似。
由图8.8可看出,随着电阻R2的值由小变大,高通,带通,低通功能端口的输出波形,变化规律同改变C2相似。
由图8.9可看出,随着电阻R3的值由小变大,高通功能端口的输出波形,Q值逐渐减小,过度带减小,且输出增益也逐渐减小;带通功能端口的输出波形,中心频率基本不变,且输出增益明显下降;低通功能端口的输出波形,截止频率变化不是很大,Q值逐渐减小,波形的过渡带减小,且输出增益也是减小的。
由图8.10可看出,随着电阻R4的值由小变大,各功能端口的变化规律同改变R3是相反的。
由图8.11可看出,随着电阻R5的值由小变大,高通功能端口的输出波形,Q值减小不明显,过度带增大,且输出增益也逐渐减小;带通功能端口的输出波形,中心频率逐渐减小,而且通带宽基本不变;低通功能端口的输出波形,截止频率变化不是很大,Q值逐渐增大,波形的过渡带减小,且输出增益增大。
由图8.12可看出,随着电阻R6的值由小变大,各功能端口的变化规律同改变R5基本相反,除了带通通带大小也基本不变。
综合上述对波形的分析,我们可以将C1或R1和C2或R2分为一组,它们是改变Q值的,改变过度带大小,同时也可改变极点频率或中心频率;将R3或R4和R5或R6分为一组,它们是改变输出增益的。
实验6无限冲激响应数字滤波器设计 实验目的: 掌握双线性变换法及脉冲相应不变法设计IIR数字滤波器的具体设计方法及其原理,熟悉用双线性变换法及脉冲响应不变法设计低通、高通和带通IIR数字滤波器的计算机编程。 实验原理: 在MATLAB中,可以用下列函数辅助设计IIR数字滤波器:1)利用buttord 和cheblord可以确定低通原型巴特沃斯和切比雪夫滤波器的阶数和截止频率; 2)[num,den]=butter(N,Wn)(巴特沃斯)和[num,den]=cheby1(N,Wn),[num,den]=cheby2(N,Wn)(切比雪夫1型和2型)可以进行滤波器的设计;3)lp2hp,lp2bp,lp2bs可以完成低通滤波器到高通、带通、带阻滤波器的转换;4)使用bilinear可以对模拟滤波器进行双线性变换,求得数字滤波器的传输函数系数;5)利用impinvar可以完成脉冲响应不变法的模拟滤波器到数字滤波器的转换。 例3-1 设采样周期T=250μs(采样频率fs =4kHz),用脉冲响应不变法和双线性变换法设计一个三阶巴特沃兹滤波器,其3dB边界频率为fc =1kHz。 [B,A]=butter(3,2*pi*1000,'s'); [num1,den1]=impinvar(B,A,4000); [h1,w]=freqz(num1,den1); [B,A]=butter(3,2/0.00025,'s');
[num2,den2]=bilinear(B,A,4000); [h2,w]=freqz(num2,den2); f=w/pi*2000; plot(f,abs(h1),'-.',f,abs(h2),'-'); grid; xlabel('频率/Hz ') ylabel('幅值/dB') 程序中第一个butter的边界频率2π×1000,为脉冲响应不变法原型低通滤波器的边界频率;第二个butter的边界频率2/T=2/0.00025,为双线性变换法原型低通滤波器的边界频率.图1给出了这两种设计方法所得到的频响,虚线为脉冲响应不变法的结果;实线为双线性变换法的结果。脉冲响应不变法由于混叠效应,使得过渡带和阻带的衰减特性变差,并且不存在传输零点。同时,也看到双线性变换法,在z=-1即Ω=π或f=2000Hz处有一个三阶传输零点,这个三阶零点正是模拟滤波器在ω=∞处的三阶传输零点通过映射形成的。 例2 设计一数字高通滤波器,它的通带为400~500Hz,通带内容许有0.5dB的波动,阻带内衰减在小于317Hz的频带内至少为19dB,采样频率为1,000Hz。 wc=2*1000*tan(2*pi*400/(2*1000)); wt=2*1000*tan(2*pi*317/(2*1000)); [N,wn]=cheb1ord(wc,wt,0.5,19,'s'); [B,A]=cheby1(N,0.5,wn,'high','s'); [num,den]=bilinear(B,A,1000); [h,w]=freqz(num,den); f=w/pi*500; plot(f,20*log10(abs(h))); axis([0,500,-80,10]); grid; xlabel('') ylabel('幅度/dB')
三阶卡尔曼滤波数字锁频环设计及性能分析 作者:李金海, 巴晓辉, 陈杰, LI Jin-hai, BA Xiao-hui, Chen Jie 作者单位:中国科学院微电子研究所,北京,朝阳区,100029 刊名: 电子科技大学学报 英文刊名:JOURNAL OF UNIVERSITY OF ELECTRONIC SCIENCE AND TECHNOLOGY OF CHINA 年,卷(期):2008,37(5) 被引用次数:1次 参考文献(10条) 1.HINEDI S.STATMAN J I High-dynamic GPS tracking final report[JPL Publication 88-35] 1988 2.AGUIRRE S.HINEDI S Two novel automatic frequency tracking loops 1989(05) 3.HINEDI S An extended Kalmaa filter based automatic frequency control loop[TDA Progress Report 42-95] 1988 4.VILNROTTER V A.HINEDI S.KUMAR R Frequency estimation techniques for high dynamic trajectories 1989(04) 5.BAR-SHALOM Y.LI X R.KIRUBARAJAN T Estimation with applications to tracking and navigation:Theory algorithms and soRware 2001 6.张厥盛.郑继禹.万心平锁相技术 2005 7.JURY E I Theory and application of the z-transform method 1964 8.邓自立.郭一新现代时间序列分析及其应用--建模、滤波、去卷、预报和控制 1988 9.GREWAL M S.ANDREWS A P Kalman filtering:theory and practice using matlab 2001 10.ARNOLD W https://www.doczj.com/doc/984028176.html,UB A J Generalized eigenproblem algorithms and software for algebraic Riccati equations 1984(12) 相似文献(9条) 1.学位论文孙峰高动态多星座接收机捕获和跟踪技术的研究与实现2009 全球导航卫星系统(GNSS)是用于定位用户接收机地理位置的一种卫星系统。目前,GNSS包括现已投入运行的三个卫星定位系统:全球定位系统(GPS)、全球导航卫星系统( GLONASS)、北斗一代系统(BD)。鉴于多星座导航定位系统的建立,多星座接收机将大大提高卫星导航定位的可靠性、精度和实时性。 高动态接收机的捕获和跟踪技术一直是研究的热点和难点。许多学者针对高动态的特殊应用做出了一些卓有成效的研究,提出了多种设计方案,重点为伪码的快速捕获和多普勒频率的跟踪。伪码的快速捕获的主要方法为:基于FFT和匹配滤波的并行捕获方法以及串并结合的滑动相关捕获方法。这些捕获方法在捕获性能和复杂性上各有优劣。本文采用了串并结合的滑动相关捕获方法,这种算法的捕获性能较好,硬件实现简单。 载波多普勒频率跟踪的主流方案是采用锁频环(FLL)+锁相环(PLL)的环路跟踪结构。使用FLL来跟踪频率的快速变化,当频率引导到PLL可处理的范围时,通过PLL来跟踪相位的变化,精确的锁定载波频率。本文采用二阶锁频环辅助三阶锁相环的环路结构,可很好的跟踪接收机的动态。 本文的主要内容为: 1.完成了多星座卫星信号接收机的硬件设计,为系统的实现搭建了硬件平台。 2.在分析了GPS、GLONASS、BD的伪码特性的基础上,采用串并结合的时域相关捕获的方法,缩短了伪码的捕获时间。 3.研究并设计了DLL码跟踪环路。经过测试验证了设计的DLL环路的正确性。 4.载波跟踪环采用三阶二象限反正切Costas环和二阶四相锁环相结合的方法,有效的消除了高动态的影响。 本论文设计的捕获和跟踪的方法最终在高动态多星座接收机上得到了实现,测试结果表明本文的设计满足系统指标要求。 2.学位论文郑宏磊GPS在干扰环境下的可用性研究2006 全球定位系统(GPS)能在全球范围内提供精确的位置、速度和时间信息,在军事和民用领域发挥着极其重要的作用。随着GPS的广泛应用,它易受到干扰的弱点也随之暴露出来,针对GPS进行的抗干扰技术也日益成为研究的热点。本文阐述了全球定位系统的工作原理,系统组成以及信号格式,在此基础上着重分析了GPS受干扰特性,为以后的工作奠定了基础。 本文将理论分析和实验相结合,结合商用GPS接收机的实际测量结果,对GPS信号受干扰前后的特性进行了分析。针对射频RF等干扰源以及多路径 ,本文介绍了抗干扰的总体设计方案,分析了几种可行的抗干扰措施,重点对环路滤波和自适应调零天线进行了研究设计。 论文在环路滤波器设计方面采用了由锁频环(FLL)辅助的锁相环(PLL)滤波器,在自适应调零天线方面设计空间-时间自适应阵列以代替空间自适应阵列,并采用功率最小预处理算法。最后通过实验仿真得到了较为理想的结果,可在一定程度上保证GPS在干扰环境下的可用性。 3.期刊论文李国栋.崔晓伟.尹旭明.冯振明.LI Guodong.CUI Xiaowei.YIN Xuming.FENG Zhenming GPS接收机中锁 频环频率误锁的检测-清华大学学报(自然科学版)2007,47(1) 为了解决全球定位系统(GPS)接收机中的锁频环在载波同步过程中可能出现的频率误锁问题,在分析了锁频环在噪声环境下的工作原理及产生频率误锁原因的基础上,基于有无发生频率误锁时同一信息符号对应的多个预检测积分值的变化规律,提出了一种用于频率误锁检测和快速纠正的算法.仿真结果表明:该方法能够在锁频环完成工作之后及时判决是否有误锁发生,误锁时可在1~2个导航比特时间内把载波频率调整到正确频率上.该方法实现简单,可
10.6 卡尔曼滤波器简介 本节讨论如何从带噪声的测量数据把有用信号提取出来的问题。通常,信号的频谱处于有限的频率范围内,而噪声的频谱则散布在很广的频率范围内。如前所述,为了消除噪声,可以把 FIR滤波器或IIR滤波器设计成合适的频带滤波器,进行频域滤波。但在许多应用场合,需要进行时域滤波,从带噪声的信号中提取有用信号。虽然这样的过程其实也算是对信号的滤波,但所依据的理论,即针对随机信号的估计理论,是自成体系的。人们对随机信号干扰下的有用信号不能“确知”,只能“估计”。为了“估计”,要事先确定某种准则以评定估计的好坏程度。最小均方误差是一种常用的比较简单的经典准则。典型的线性估计器是离散时间维纳滤波器与卡尔曼滤波器。 对于平稳时间序列的最小均方误差估计的第一个明确解是维纳在1942年2月首先给出的。当时美国的一个战争研究团体发表了一个秘密文件,其中就包括维纳关于滤波问题的研究工作。这项研究是用于防空火力控制系统的。维纳滤波器是基于最小均方误差准则的估计器。为了寻求维纳滤波器的冲激响应,需要求解著名的维纳-霍夫方程。这种滤波理论所追求的是使均方误差最小的系统最佳冲激响应的明确表达式。这与卡尔曼滤波(Kalman filtering)是很不相同的。卡尔曼滤波所追求的则是使均方误差最小的递推算法。 在维纳进行滤波理论研究并导出维纳-霍夫方程的十年以前,在1931年,维纳和霍夫在数学上就已经得到了这个方程的解。 对于维纳-霍夫方程的研究,20世纪五十年代涌现了大量文章,特别是将维纳滤波推广到非平稳过程的文章甚多,但实用结果却很少。这时正处于卡尔曼滤波问世的前夜。 维纳滤波的困难问题,首先在上世纪五十年代中期确定卫星轨道的问题上遇到了。1958年斯韦尔林(Swerling)首先提出了处理这个问题的递推算法,并且立刻被承认和应用。1960年卡尔曼进行了比斯韦尔林更有意义的工作。他严格地把状态变量的概念引入到最小均方误差估计中来,建立了卡尔曼滤波理论。空间时代的到来推动了这种滤波理论的发展。 维纳滤波与卡尔曼滤波所研究的都是基于最小均方误差准则的估计问题。 维纳滤波理论的不足之处是明显的。在运用的过程中,它必须把用到的全部数据存储起来,而且每一时刻都要通过对这些数据的运算才能得到所需要的各种量的估值。按照这种滤波方法设置的专用计算机的存储量与计算量必然很大,很难进行实时处理。虽经许多科技工作者的努力,在解决非平稳过程的滤波问题时,给出能用的方法为数甚少。到五十年代中期,随着空间技术的发展,这种方法越来越不能满足实际应用的需要,面临了新的挑战。尽管如此,维纳滤波理论在滤波理论中的开拓工作是不容置疑的,维纳在方法论上的创见,仍然影响着后人。 五十年代中期,空间技术飞速发展,要求对卫星轨道进行精确的测量。为此,人们将滤波问题以微分方程表示,提出了一系列适应空间技术应用的精练算法。1960年
实验六 用窗函数法设计 FIR 滤波器 一、实验目的 (1) 掌握用窗函数法设计FIR 数字滤波器的原理和方法。 (2) 熟悉线性相位FIR 数字滤波器特性。 (3) 了解各种窗函数对滤波特性的影响。 二、实验原理 滤波器的理想频率响应函数为H d (e j ω ),则其对应的单位脉冲响应为: h d (n) = ?-π π ωωωπ d e e H n j j d )(21 窗函数设计法的基本原理是用有限长单位脉冲响应序列h(n)逼h d (n)。由于h d (n)往往是无 限长序列,且是非因果的,所以用窗函数。w(n)将h d (n)截断,并进行加权处理: h(n) = h d (n) w(n) h(n)就作为实际设计的FIR 数字滤波器的单位脉冲响应序列,其频率响应函数H(e j ω )为: H(e j ω ) = ∑-=-1 )(N n n j e n h ω 如果要求线性相位特性,则h (n )还必须满足: )1()(n N h n h --±= 可根据具体情况选择h(n)的长度及对称性。 用窗函数法设计的滤波器性能取决于窗函数w(n)的类型及窗口长度N 的取值。设计过程中,要根据对阻带最小衰减和过渡带宽度的要求选择合适的窗函数类型和窗口长度N 。 三、实验步骤 1. 写出理想低通滤波器的传输函数和单位脉冲响应。 2. 写出用四种窗函数设计的滤波器的单位脉冲响应。 3. 用窗函数法设计一个线性相位FIR 低通滤波器,用理想低通滤波器作为逼近滤波器,截止频率ωc =π/4 rad ,选择窗函数的长度N =15,33两种情况。要求在两种窗口长度下,分别求出h(n),打印出相应的幅频特性和相频特性曲线,观察3dB 带宽和阻带衰减; 4 用其它窗函数(汉宁窗(升余弦窗)、哈明窗(改进的升余弦窗)、布莱克曼窗) 设计该滤波器,要求同1;比较四种窗函数对滤波器特性的影响。 四、实验用MATLAB 函数 可以调用MATLAB 工具箱函数fir1实现本实验所要求的线性相位FIR-DF 的设计,调用一维快速傅立叶变换函数fft 来计算滤波器的频率响应函数。
卡尔曼滤波的原理以及应用 滤波,实质上就是信号处理与变换的过程。目的是去除或减弱不想要成分,增强所需成分。卡尔曼滤波的这种去除与增强过程是基于状态量的估计值和实际值之间的均方误差最小准则来实现的,基于这种准则,使得状态量的估计值越来越接近实际想要的值。而状态量和信号量之间有转换的关系,所以估计出状态量,等价于估计出信号量。所以不同于维纳滤波等滤波方式,卡尔曼滤波是把状态空间理论引入到对物理系统的数学建模过程中来,用递归方法解决离散数据线性滤波的问题,它不需要知道全部过去的数据,而是用前一个估计值和最近一个观察数据来估计信号的当前值,从而它具有运用计算机计算方便,而且可用于平稳和不平稳的随机过程(信号),非时变和时变的系统的优越性。 卡尔曼滤波属于一种软件滤波方法,概括来说其基本思想是:以最小均方误差为最佳估计准则,采用信号与噪声的状态空间模型,利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值,算法根据建立的系统方程和观测方程对需要处理的信号做出满足最小均方误差的估计。其所得到的解是以估计值的形式给出的。 卡尔曼滤波过程简单来说主要包括两个步骤:状态变量的预估以及状态变量的校正。预估过程是不考虑过程噪声和量测噪声,只是基于系统本身性质并依靠前一时刻的估计值以及系统控制输入的一种估计;校正过程是用量测值与预估量测值之间的误差乘以一个与过程
噪声和量测噪声相关的增益因子来对预估值进行校正的,其中增益因子的确定与状态量的均方误差有关,用到了使均方误差最小的准则。而这一过程中体现出来的递归思想即是:对于当前时刻的状态量估计值以及均方误差预估值实时进行更新,以便用于下一时刻的估计,使得系统在停止运行之前能够源源不断地进行下去。 下面对于其数学建模过程进行详细说明。 1.状态量的预估 (1)由前一时刻的估计值和送给系统的可控制输入来预估计当前时刻状态量。 X(k|k-1)=A X(k-1|k-1)+B U(k) 其中,X(k-1|k-1)表示前一时刻的估计值,U(k)表示系统的控制输入,X(k|k-1)表示由前一时刻估计出来的状态量的预估计值,A表示由k-1时刻过渡到k时刻的状态转移矩阵,B表示控制输入量与状态量之间的一种转换因子,这两个都是由系统性质来决定的。 (2)由前一时刻的均方误差阵来预估计当前时刻的均方误差阵。 P(k|k-1)=A P(k-1|k-1)A’+Q 其中,P(k-1|k-1)是前一时刻的均方误差估计值,A’代表矩阵A 的转置,Q代表过程噪声的均方误差矩阵。该表达式具体推导过程如下: P(k|k-1)=E{[Xs(k|k)-X(k|k-1)][Xs(k|k)-X(k|k-1)]’}------ 其中Xs(k|k)=A Xs(k-1|k-1)+B U(k)+W(k-1)表示当前时刻的实际值,Xs(k-1|k-1)表示前一时刻的实际值,可以看出与当前时刻的预估计值
实验五 IIR 数字滤波器设计与滤波 1.实验目的 (1)加深对信号采样的理解, (2)掌握滤波器设计的方法; (3)复习低通滤波器的设计。 2.实验原理 目前,设计IIR 数字滤波器的通用方法是先设计相应的低通滤波器,然后再通过双线性变换法和频率变换得到所需要的数字滤波器。模拟滤波器从功能上分有低通、高通、带通及带阻四种,从类型上分有巴特沃兹(Butterworth )滤波器、切比雪夫(Chebyshev )I 型滤波器、切比雪夫II 型滤波器、椭圆(Elliptic )滤波器以及贝塞尔(Bessel )滤波器等。 典型的模拟低通滤波器的指标如下:,P S ΩΩ分别为通带频率和阻带频率,,P S δδ分别为通带和阻带容限(峰波纹值)。在通带内要求1()1P a H J δ-≤Ω≤,有时指标由通带最大衰减p α和阻带最小衰减s α给出,定义如下:20lg(1)p p αδ=-- 和20lg()s s αδ=- 第二种常用指标是用参数ε和A 表示通带和阻带要求,如图所示: 二者之间的关系为:21/2[(1)1]p εδ-=--和1/s A δ=,根据这几个参数可导出另外两个参数d ,k ,分别称为判别因子和选择性因子。 21d A = - /p s k =ΩΩ
BUTTERWORTH 低通滤波器:幅度平方函数定义为221()1(/)a N c H J Ω=+ΩΩ,N 为滤波器阶数,c Ω为截止频率。当c Ω=Ω 时,有()1/a H J Ω=3DB 带宽。 BUTTERWORTH 低通滤波器系统函数有以下形式: 11111()...() N c a N N N N N k H s s a s a s a k s s --=Ω==++++∏- 由模拟滤波器设计IIR 数字滤波器,必须建立好s 平面和z 平面的映射关系。使模拟系统函数()a H s 变换成数字滤波器的系统函数()H z ,通常采用冲激相应不变法和双线性变换法。冲激相应不变法存在频谱混叠现象,双线性变换法消除了这一线象,在IIR 数字滤波器的设计中得到了更广泛的应用。 s 平面和Z 平面的映射关系为1 121()1s Z s f Z T Z ---==+,将s j =Ω和jw z e =待入数字频率和等效的模拟频率之间的映射关系:tan()2 w Ω=,由于二者不是线性关系,所以称为预畸变。 3.实验内容及其步骤 实验的步骤: (1)给定数字滤波器的幅度相应参数。 (2)用预畸变公式将数字滤波器参数变换为相应的等效模拟滤波器参数。 (3)采用模拟滤波器设计方法设计等效模拟滤波器()a H s (4)采用双线性变换公式把等效模拟滤波器映射为所期望的数字滤波器。 其中第三步中模拟滤波器设计步骤为: 首先,根据滤波器指标求选择因子k 和判别因子d 其次,确定满足技术所需的滤波器阶数N, log log d N k ≥ 再次,设3db 截止频率c Ω
课程编号 实验项目序号 本科学生实验卡和实验报告 信息科学与工程学院 通信工程专业2013级1301班 课程名称:数字信号处理 实验项目:FIR滤波器设计 2015~~2016学年第二学期 学号:0104_ 姓名:__ _王少丹_ __ 专业年级班级: ____通信1301_____ ____四合院___ 实验室组别________ 实验日期 __2016 年_ 6__ 月___12_ 日
(2) 求滤波器的单位抽样响应、频率响应,并绘制波形。 e. 设计FIR 数字带通滤波器,技术指标为: 下阻带边缘:ωst1=0.2π,δs1=20dB,下通带边缘:ωp1=0.4π,δp1=1dB;上通带边缘:ωp2=0.6π,δp1=1dB,上阻带边缘:ωst2=0.8π,δs2=20dB; (1) 通过技术指标,选择一种窗函数进行设计; (2) 求滤波器的单位抽样响应、频率响应,并绘制波形。 f. 设计FIR 数字高通滤波器,技术指标为:通带截止频率为ωp=15π/27,阻带截止频率为ωst=11π/27,通带最大衰减为δ1=2.5dB,阻带最小衰减为δ2=55dB。 (1) 通过技术指标,选择一种窗函数进行设计; (2) 求滤波器的单位抽样响应、频率响应,并绘制波形。系统一: g. 设计FIR 数字高通滤波器,技术指标为:通带截止频率为ωp=0.6π,阻带截止频率为ωst=0.4π,通带最大衰减为δ1=0.25dB,阻带最小衰减为δ2=40dB。 (1) 通过技术指标,选择一种窗函数进行设计; (2) 求滤波器的单位抽样响应、频率响应,并绘制波形。 h. 滤波器的技术指标为:通带截止频率为ωp=0.6π,阻带截止频率为ωst=0.4π,通带最大衰减为δ1=0.25dB,阻带最小衰减为δ2=40dB。 (1) 通过技术指标,选择一种窗函数设计一个具有π/2 相移的FIR 高通滤波器; (2) 求滤波器的单位抽样响应、频率响应,并绘制波形。 i. 设计FIR 数字带阻滤波器,其技术指标为: 低端阻带边缘:ωst1=0.4π,δs1=40dB,低端通带边缘:ωp1=0.2π,δp1=1dB;高端通带边缘:ωp2=0.8π,δp1=1dB,高端阻带边缘:ωst2=0.6π,δs2=40dB; (1) 通过技术指标,选择一种窗函数进行设计; (2) 求滤波器的单位抽样响应、频率响应,并绘制波形。 FIR 滤波器的单位抽样响应为h(n)=1/9{},编制MATLAB 程序求系统的频率采样型结构的系数,并画出频率抽样型结构。 m. 一个理想差分器的频率响应为: 用长度为21 的汉宁窗设计一个数字FIR 差分器,并绘制其时域和频率的响应波形。 n. 利用汉宁窗设计一个长度为25 的数字希尔伯特变换器,并绘制它的时域和频域的响应波形。 p. FIR 数字低通滤波器的技术指标为:ωp=0.2π,ωst=0.3π,δ1=0.25dB,δ2=50dB。利用频率采样方法设计FIR 数字滤波器,并绘制滤波器的单位冲激响应、幅度频率响应的波形。 q. 用窗函数法设计一个线性相位的FIR 数字低通滤波器,其技术指标为:ω
实验二IIR数字滤波器的设计 实验内容及步骤: 数字滤波器的性能指标:通带临界频率fp、阻带临界频率fr;通带内的最大衰减Ap;阻带内的最小衰减Ar;采样周期T; (1)、fp=0.3KHz,Ap=0.8dB, fr=0.2KHz,Ar=20dB,T=1ms;设计一Chebyshev高通滤波器;观察其通带损耗和阻带衰减是否满足要求。 程序如下: fp=300; fr=200; Ap=0.8; Ar=20; T=0.001;fs=1/T; wp=2*pi*fp*T; wr=2*pi*fr*T; Wp=2/T*tan(wp/2); Wr=2/T*tan(wr/2); [N,Wn]=cheb1ord(Wp,Wr,Ap,Ar,'s'); [B,A] = cheby1(N,Ap,Wn,'high','s'); [num,den]=bilinear(B,A,1/T); [h,w]=freqz(num,den); plot(w*fs/(2*pi),20*log10(abs(h))); %衰减及频率都用归一化的1为单位显示axis([0,500,-30,0]); title('Chebyshev高通滤波器'); xlabel('频率'); ylabel('衰减'); grid on; 根据下图知道通带损耗与阻带衰减满足要求
(2)、fp=0.2KHz,Ap=1dB, fr=0.3KHz,Ar=25dB,T=1ms;分别用脉冲响应不变法及双线性变换法设计一Butterworth数字低通滤波器,观察所设计数字滤波器的幅频特性曲线,记录带宽和衰减量,检查是否满足要求。比较这两种方法的优缺点。 程序如下: fp=200; fr=300; Ap=1;Ar=25; T=0.001;fs=1/T; wp=2*pi*fp*T; wr=2*pi*fr*T; Wp=2/T*tan(wp/2); Wr=2/T*tan(wr/2); [N,Wn]=buttord(Wp,Wr,Ap,Ar,'s'); [B,A] = butter(N,Wn,'s'); [num1,den1]=impinvar(B,A,1/T); %脉冲响应不变法得出设计的传递函数 [num2,den2]=bilinear(B,A,1/T); %双线性变换法得出设计的传递函数[h1,w]=freqz(num1,den1); plot(w*fs/(2*pi),20*log10(abs(h2)),w*fs/(2*pi),20*log10(abs(h1)), 'r.');grid on; %衰减及频率都用归一化的1为单位显示 axis([0,500,-30,0]); title('Butterworth低通滤波器(红线—脉冲响应不变法蓝线—双线性变换法)'); xlabel('?μ?ê');
卡尔曼滤波器介绍 Greg Welch1and Gary Bishop2 TR95-041 Department of Computer Science University of North Carolina at Chapel Hill3 Chapel Hill,NC27599-3175 翻译:姚旭晨 更新日期:2006年7月24日,星期一 中文版更新日期:2007年1月8日,星期一 摘要 1960年,卡尔曼发表了他著名的用递归方法解决离散数据线性滤波问题的论文。从那以后,得益于数字计算技术的进步,卡尔曼滤波器已成为推广研究和应用的主题,尤其是在自主或协助导航领域。 卡尔曼滤波器由一系列递归数学公式描述。它们提供了一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。卡尔曼滤波器应用广泛且功能强大:它可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确切性质。 这篇文章介绍了离散卡尔曼理论和实用方法,包括卡尔曼滤波器及其衍生:扩展卡尔曼滤波器的描述和讨论,并给出了一个相对简单的带图实例。 1welch@https://www.doczj.com/doc/984028176.html,,https://www.doczj.com/doc/984028176.html,/?welch 2gb@https://www.doczj.com/doc/984028176.html,,https://www.doczj.com/doc/984028176.html,/?gb 3北卡罗来纳大学教堂山分校,译者注。 1
Welch&Bishop,卡尔曼滤波器介绍2 1离散卡尔曼滤波器 1960年,卡尔曼发表了他著名的用递归方法解决离散数据线性滤波问题的论文[Kalman60]。从那以后,得益于数字计算技术的进步,卡尔曼滤波器已成为推广研究和应用的主题,尤其是在自主或协助导航领域。[Maybeck79]的第一章给出了一个非常“友好”的介绍,更全面的讨论可以参考[Sorenson70],后者还包含了一些非常有趣的历史故事。更广泛的参考包括[Gelb74,Grewal93,Maybeck79,Lewis86,Brown92,Jacobs93]。 被估计的过程信号 卡尔曼滤波器用于估计离散时间过程的状态变量x∈ n。这个离散时间过程由以下离散随机差分方程描述: x k=Ax k?1+Bu k?1+w k?1,(1.1)定义观测变量z∈ m,得到量测方程: z k=Hx k+v k.(1.2)随机信号w k和v k分别表示过程激励噪声1和观测噪声。假设它们为相互独立,正态分布的白色噪声: p(w)~N(0,Q),(1.3) p(v)~N(0,R).(1.4)实际系统中,过程激励噪声协方差矩阵Q和观测噪声协方差矩阵R可能会随每次迭代计算而变化。但在这儿我们假设它们是常数。 当控制函数u k?1或过程激励噪声w k?1为零时,差分方程1.1中的n×n 阶增益矩阵A将上一时刻k?1的状态线性映射到当前时刻k的状态。实际中A可能随时间变化,但在这儿假设为常数。n×l阶矩阵B代表可选的控制输入u∈ l的增益。量测方程1.2中的m×n阶矩阵H表示状态变量x k 对测量变量z k的增益。实际中H可能随时间变化,但在这儿假设为常数。滤波器的计算原型 定义?x?k∈ n(?代表先验,?代表估计)为在已知第k步以前状态情况下第k步的先验状态估计。定义?x k∈ n为已知测量变量z k时第k步的后验状态估计。由此定义先验估计误差和后验估计误差: ≡x k??x?k, e? k e k≡x k??x k 1原文为process noise,本该翻译作过程噪声,由时间序列信号模型的观点,平稳随机序列可以看成是由典型噪声源激励线性系统产生,故译作过程激励噪声。 UNC-Chapel Hill,TR95-041,July24,2006
Guangxi University of Science and Technology 实验报告 实验课程:数字信号处理教程 实验容: IIR数字滤波器的设计 院(系):计算机科学与通信工程学院 专业:通信工程 班级: 学生:
学号: 指导教师: 2016年 6月14日
实验六 IIR数字滤波器的设计 一、实验目的 1.掌握双线性变换法及冲激响应不变法设计IIR数字滤波器的具体设 计方法及其原理,熟悉用双线性变换法及冲激响应不变法设计低通、高通和带通IIR数字滤波器的计算机编程。 2.观察双线性变换及冲激响应不变法设计的滤波器的频域特性,了解 双线性变换法及冲激响应不变法的特点。 3.熟悉Butterworth滤波器、Chebyshev滤波器的频率特性。 二、实验原理与方法 (1)冲激响应不变法 用数字滤波器的单位冲激响应序列h(n)模仿模拟滤波器的冲激响应 h a (t),让h(n)正好等于h a (t)的采样值,即 h(n)= h a (nT) 其中T为采样间隔,如果以H a (S)及H(z)分别表示h a (t)的拉式变换及h(n) 的Z变换,则 (2)双线性变换法 S平面与z平面之间满足以下映射关系: s平面的虚轴单值地映射于z平面的单位圆上,s平面的左半平面完全映射到z平面的单位圆。双线性变换不存在混叠问题。
双线性变换时一种非线性变换,这种非线性引起的幅频特性畸变可通过预畸而得到校正。 IIR低通、高通、带通数字滤波器设计采用双线性原型变换公式: 变换 类型 变换关系式备注低通 高通 带通 为带通的上下 边带临界频率 以低通数字滤波器为例,将设计步骤归纳如下: 1.确定数字滤波器的性能指标:通带临界频率fp、阻带临界频率fr;通带 的最大衰减Ap;阻带的最小衰减Ar;采样周期T; 2.确定相应的数字角频率,ω p =2πf p T;ω r =2πf r T; 3.计算经过预畸的相应模拟低通原型的频率, ; 4.根据Ω p 和Ω r 计算模拟低通原型滤波器的阶数N,并求得低通原型的传 递函数H a (s); 5.用上面的双线性变换公式代入H a (s),求出所设计的传递函数H(z); 6.分析滤波器特性,检查其指标是否满足要求。 三、实验容及步骤
3 卡尔曼滤波器的简介 3.1 卡尔曼滤波器的概述 卡尔曼滤波器[4] 由一系列递归数学公式描述,它们提供了一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。卡尔曼滤波器应用广泛且功能强大,它可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确切性质。 假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟的温度(假设我们用一分钟来做时间单位)。假设你对你的经验不是100%的相信,可能会有上下偏差几度。我们把这些偏差看成是高斯白噪声(White Gaussian Noise ),也就是这些偏差跟前后时间是没有关系的而且符合高斯分配(Gaussian Distribution )。另外,我们在房间里放一个温度计,但是这个温度计也不准确的,测量值会比实际值偏差。我们也把这些偏差看成是高斯白噪声。 现在对于某一分钟我们有两个有关于该房间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。 假如我们要估算k 时刻的是实际温度值。首先你要根据1k -时刻的温度值,来预测k 时刻的温度。因为你相信温度是恒定的,所以你会得到k 时刻的温度预测值是跟1k -时刻一样的,假设是23度,同时该值的高斯噪声的偏差是5度(5是这样得到的:如果1k -时刻估算出的最优温度值的偏差是3,你对自己预测的不确定度是4度,他们平方相加再开方,就是5)。然后,你从温度计那里得到了k 时刻的温度值,假设是25度,同时该值的偏差是4度。 由于我们用于估算k 时刻的实际温度有两个温度值,分别是23度和25度。究竟实际温度是多少呢?相信自己还是相信温度计呢?究竟相信谁多一点,我们可以用他们的协方差来判断。因为 252(52 42)Kg ∧∧∧∧ =+,所以0.78 Kg =,我们可以估算出k 时刻的实际温度值是:230.78(2523)24.56+*-=度。可以看出,因为温度计的协方差比较小(比较相信温度计),所以估算 出的最优温度值偏向温度计的值。 现在我们已经得到k 时刻的最优温度值了,下一步就是要进入1k -时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入1k -时刻之前,我们还要算出k 时刻那个最优值(24.56度)的偏差。算法如下:((1)5 2)0.5 2.35Kg ∧ ∧-*=。这里的5就是上面的k 时刻你预测的 那个23度温度值的偏差,得出的2.35就是进入1k +时刻以后k 时刻估算出的最优温度值的偏差(对应于上面的3)。 就是这样,卡尔曼滤波器就不断的把协方差递归,从而估算出最优的温度值。他运行的很快,而且它只保留了上一时刻的协方差。上面的Kg ,就是卡尔曼增益(Kalman Gain )。他可以随不同的时刻而改变他自己的值! 3.2 卡尔曼滤波器的算法
实验五:FIR数字滤波器设计与软件实现 一、实验指导 1.实验目的 (1)掌握用窗函数法设计FIR数字滤波器的原理和方法。 (2)掌握用等波纹最佳逼近法设计FIR数字滤波器的原理和方法。(3)掌握FIR滤波器的快速卷积实现原理。 (4)学会调用MATLAB函数设计与实现FIR滤波器。 2.实验内容及步骤 (1)认真复习第七章中用窗函数法和等波纹最佳逼近法设计FIR数字滤波器的原理; (2)调用信号产生函数xtg产生具有加性噪声的信号xt,并自动显示xt及其频谱,如图1所示; 图1 具有加性噪声的信号x(t)及其频谱如图 (3)请设计低通滤波器,从高频噪声中提取xt中的单频调幅信号,要求信号幅频失真小于0.1dB,将噪声频谱衰减60dB。先观察xt的频谱,确定滤波器指标参数。
(4)根据滤波器指标选择合适的窗函数,计算窗函数的长度N,调用MATLAB函数fir1设计一个FIR低通滤波器。并编写程序,调用MATLAB快速卷积函数fftfilt实现对xt的滤波。绘图显示滤波器的频响特性曲线、滤波器输出信号的幅频特性图和时域波形图。(4)重复(3),滤波器指标不变,但改用等波纹最佳逼近法,调用MATLAB函数remezord和remez设计FIR数字滤波器。并比较两种设计方法设计的滤波器阶数。 提示:○1MATLAB函数fir1的功能及其调用格式请查阅教材; ○2采样频率Fs=1000Hz,采样周期T=1/Fs; ○3根据图1(b)和实验要求,可选择滤波器指标参数:通带截止频率fp=120Hz,阻带截至频率fs=150Hz,换算成数字频率,通带截止 频率 p 20.24 p f ωπ =T=π,通带最大衰为0.1dB,阻带截至频率 s 20.3 s f ωπ =T=π,阻带最小衰为60dB。 ○4实验程序框图如图2所示,供读者参考。
实验六 用窗函数设计FIR 滤波器 1.实验目的 (1) 熟悉FIR 滤波器设计的方法和原理 (2) 掌握用窗函数法设计FIR 滤波器的方法和原理,熟悉滤波器的特性 (3) 了解各种窗函数滤波器特性的影响 2.实验原理 FIR 滤波器的设计方法主要有三种:窗函数法、频率取样法、切比雪夫等波纹逼近法。FIR 滤波器的设计是要寻求一系统函数)(z H ,使其频率响应)(ωj e H 逼近滤波器要求的理想频率响应()j d H e ω,其对应的单位脉冲响应)(n h d 。 (1)用窗函数设计FIR 滤波器的基本方法 在时域用一个窗函数截取理想的)(n h d 得到)(n h ,以有限长序列)(n h 近似逼近理想的)(n h d ;在频域用理想的)(ωj d e H 在单位圆上等角度取样得到h(k),根据h(k)得到H(z)将逼近理想的Hd(z)。 设理想滤波器)(ωj d e H 的单位脉冲响应为)(n h d 。以低通线性相位FIR 数字滤波器为 例。 )(n h d 一般是无限长的、非因果的,不能直接作为FIR 滤波器的单位脉冲响应。要想得到一个因果的有限长的滤波器h(n),最直接的方法是截断)()()(n w n h n h d =,即截取为有限长因果序列,并用合适的窗函数进行加权作为FIR 滤波器的单位脉冲响应。按照线性相位滤波器的要求,h(n)必须是偶对称的。对称中心必须等于滤波器的延时常数,即 用矩形窗设计的FIR 低通滤波器,所设计滤波器的幅度函数在通带和阻带都呈现出振荡现象,且最大波纹大约为幅度的9%,(现象称为吉布斯(Gibbs )效应)。 (2)典型的窗函数 (a )矩形窗(Rectangle Window) 其频率响应和幅度响应分别为: 21)2/sin()2/sin()(--=N j j e N e W ωωωω,) 2/sin()2/sin()(ωωωN W R = 在matlab 中调用w=boxcar(N)函数,N 为窗函数的长度 (b )三角形窗(Bartlett Window) 其频率响应为:212])2/sin()4/sin([2)(--=N j j e N N e W ωω ωω 在matlab 中调用w=triang(N)函数,N 为窗函数的长度 (c )汉宁(Hanning)窗,又称升余弦窗 其频率响应和幅度响应分别为:
实验六 用窗函数设计FIR 滤波器 1.实验目的 (1) 熟悉FIR 滤波器设计的方法和原理 (2) 掌握用窗函数法设计FIR 滤波器的方法和原理,熟悉滤波器的特性 (3) 了解各种窗函数滤波器特性的影响 2.实验原理 FIR 滤波器的设计方法主要有三种:窗函数法、频率取样法、切比雪夫等波纹逼近法。FIR 滤波器的设计是要寻求一系统函数)(z H ,使其频率响应)(ω j e H 逼近滤波器要求的理 想频率响应()j d H e ω ,其对应的单位脉冲响应)(n h d 。 (1)用窗函数设计FIR 滤波器的基本方法 在时域用一个窗函数截取理想的)(n h d 得到)(n h ,以有限长序列)(n h 近似逼近理想的 )(n h d ;在频域用理想的)(ωj d e H 在单位圆上等角度取样得到h(k),根据h(k)得到H(z)将 逼近理想的Hd(z)。 设理想滤波器)(ω j d e H 的单位脉冲响应为)(n h d 。以低通线性相位FIR 数字滤波器为 例。 ?∑- -∞ -∞ == =π πωωω ω ω π d e e H n h e n h e H jn j d d jn n d j d )(21)()()( )(n h d 一般是无限长的、非因果的,不能直接作为FIR 滤波器的单位脉冲响应。要想得 到一个因果的有限长的滤波器h(n),最直接的方法是截断)()()(n w n h n h d =,即截取为有
限长因果序列,并用合适的窗函数进行加权作为FIR 滤波器的单位脉冲响应。按照线性相位滤波器的要求,h(n)必须是偶对称的。对称中心必须等于滤波器的延时常数,即 ?? ?-==2 /)1() ()()(N a n w n h n h d 用矩形窗设计的FIR 低通滤波器,所设计滤波器的幅度函数在通带和阻带都呈现出振荡现象,且最大波纹大约为幅度的9%,(现象称为吉布斯(Gibbs )效应)。 (2)典型的窗函数 (a )矩形窗(Rectangle Window) )()(n R n w N = 其频率响应和幅度响应分别为: 2 1) 2/sin()2/sin()(--=N j j e N e W ω ω ωω,) 2/sin() 2/sin()(ωωωN W R = 在matlab 中调用w=boxcar(N)函数,N 为窗函数的长度 (b )三角形窗(Bartlett Window) ???? ?-≤<----≤ ≤-=121 ,1 22210,12)(N n N N n N n N n n w 其频率响应为:21 2]) 2/sin()4/sin([2)(--=N j j e N N e W ωω ωω 在matlab 中调用w=triang(N)函数,N 为窗函数的长度 (c )汉宁(Hanning)窗,又称升余弦窗 )()]1 2cos(1[21)(n R N n n w N --=π 其频率响应和幅度响应分别为:
数 字信号处理 实验报告 实验四 IIR数字滤波器的设计 学生姓名张志翔 班级电子信息工程1203班学号12401720522
指导教师 2015.4.29 实验四 IIR 数字滤波器的设计 一、实验目的: 1. 掌握双线性变换法及脉冲响应不变法设计IIR 数字滤波器的具体设计方法及其原理,熟悉用双线性变换法及脉冲响应不变法设计低通、高通和带通IIR 数字滤波器的MATLAB 编程。 2. 观察双线性变换及脉冲响应不变法设计的滤波器的频域特性,了解双线性变换法及脉冲响应不变法的特点。 3. 熟悉Butterworth 滤波器、切比雪夫滤波器和椭圆滤波器的频率特性。 二、实验原理: 1. 脉冲响应不变法 用数字滤波器的单位脉冲响应序列 模仿模拟滤波器的冲激响应 ,让 正好等于 的采样值,即 ,其中 为采样间隔,如果以 及 分别表示 的拉式变换及 的Z 变换,则 )2(1)(m T j s H T z H m a e z sT ∑∞-∞==+=π 2.双线性变换法 S 平面与z 平面之间满足以下映射关系: );(,2121,11211ωωσj re z j s s T s T z z z T s =+=-+ =+-?=-- s 平面的虚轴单值地映射于z 平面的单位圆上,s 平面的左半平面完
全映射到z平面的单位圆内。 双线性变换不存在混叠问题。 双线性变换是一种非线性变换,这种非线性引起的幅频特性畸变可通过预畸而得到校正。 三、实验内容及步骤: 实验中有关变量的定义: fc 通带边界频率; fr阻带边界频率;δ通带波动;At 最小阻带衰减; fs采样频率; T采样周期 (1) =0.3KHz, δ=0.8Db, =0.2KHz, At =20Db,T=1ms; 设计一个切比雪夫高通滤波器,观察其通带损耗和阻带衰减是否满足要求。 MATLAB源程序: wp=2*1000*tan(2*pi*300/(2*1000)); ws=2*1000*tan(2*pi*200/(2*1000)); [N,wn]=cheb1ord(wp,ws,0.8,20,'s'); %给定通带(wp)和阻带(ws)边界角频率,通带波动波动0.8,阻带最小衰减20dB,求出最低阶数和通带滤波器的通带边界频率Wn [B,A]=cheby1(N,0.5,wn,'high','s');%给定通带(wp)和阻带(ws)边界角频率,通带波动 [num,den]=bilinear(B,A,1000);