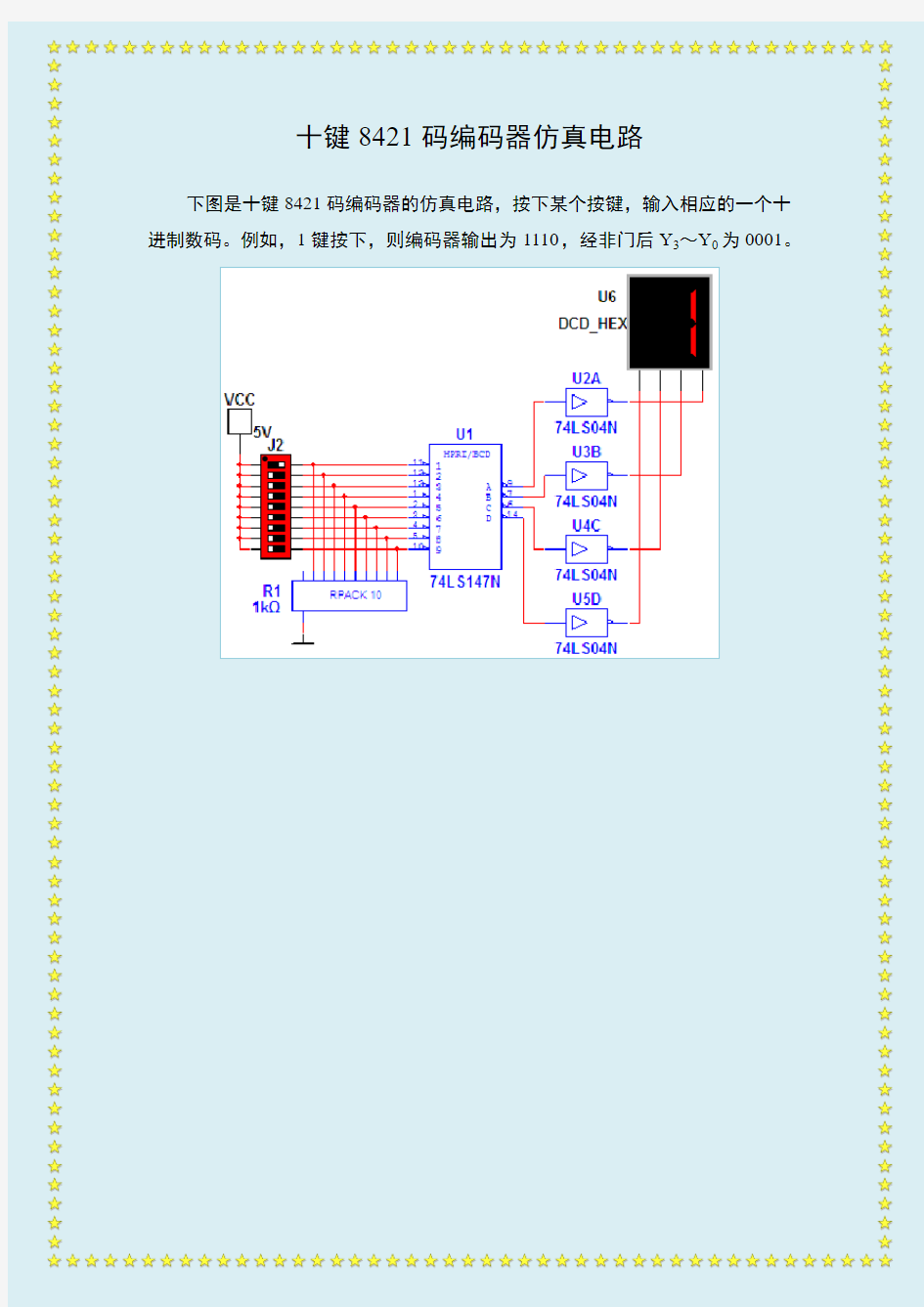
十键8421码编码器仿真电路
下图是十键8421码编码器的仿真电路,按下某个按键,输入相应的一个十
进制数码。例如,1键按下,则编码器输出为1110,经非门后Y3~Y0为0001。
四倍频细分电路(含波形图) 时间:2010-06-12 05:00:19 来源:作者: 1.光电编码器原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。 1.1增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 1.2绝对式编码器 绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。目前国内已有16位的绝对编码器产品。 绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是: 1.2.1可以直接读出角度坐标的绝对值; 1.2.2没有累积误差; 1.2.3电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。 1.3混合式绝对值编码器
光电编码器原理课件
光电编码器 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90&or dm;的两路脉冲信号。 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。(REP) 1.1增量式编码器
增量式编码器是直接利用光电转换原理 输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90º,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 1.2绝对式编码器 绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
光电编码器原理及应用电路 1、光电编码器原理 光电编码譌就星一种通过光电转换将输出轴上得机械几何位移量转换成脉冲或数字■得传感器?这就蹇目 前应用最多得传感器,光电编码器就是由光栅盘与光电检测装迓组成?光栅盘就是在一走臺径得?板上等 分地开通若干个长方形孔.由于光电码盘与电动机同轴,电动机旋转时「光栅盘与电动机同速旋车专,经发光二 极■等电子元件组成得检测装迓检测输出若干脉冲信号,其原理示总S 如ffi 1所示;通过计算每秒光电编码 器输出脉冲得个数就能反映当前电动机得转速.此外为判断旋转方向,码盘还可提供相位相差90度得脉 冲碍 图1光电编码S 原理示S 图 ffi 1光电缩码?原理示意? 根垢检测原理编码器可分为光学貳、磁式、感应式与电容式?根揣其刻度方法及信号输出形式,可分为增量 式、绝对式以及混合式三种. 1、1增量式编码器 ? ■式编码器就是妣利用光电转换原理输出三组方波脉冲A 、B 与Z 相;A 、B 两组脉冲相位差90度得 脉冲信号忆相为每转一个脉冲,用于墓准点走位.它得优点就是原理构适简单,机械平均寿命可在几万小时 以上抗干扰能力强「可靠性画适合于长距离传输?其缺点就麻法输出轴转动得绝对位琶信息? 1、2绝対式编码器 绝对竊码器就是厦接输出数字■得传感器,在它得圆形码盘上沿径向有若干同心码匾每条通上由透光与不 透光得扇形区相间组成,相邻码iS 得扇区数目就墨双倍关嬴码盘上得码通数就就墨它得二进制数码得位埶 在码盘得一侧就是光鴻另TW 对应每Fis 有Tess 元件;当码盘处于不同位迓时各光敏元件根据受光照 与否转换岀相应得电平信号■形成二进制数?这种扁码器得持原就超不耍计数器,在转轴得任倉位迓都可读 岀一个a 走得与位迓相対应得数字码?显然「码通越多■分辨率就越画对于一个典有N 位二进制分辨率得竊 码器,其码盘必须有N 条码通?目前国内已有16位得绝对编码?产品? 绝对式竊码器就是利用目然二进制或循环二逬制(葛莱码)方式进行光电转换^專?绝对式编码器与1?量式编 码器不同之处在于圆盘上透光.不透光得线条a 形,绝对編码器可有若干编码,根JB 读出码盘上得編码,检测 绝对位编码得设计可采用二iS 制码.循环码?二进制补码等?它得特原就是: 1、2、1可以車接读出角度坐标得绝対值; 1、2、2没有累积题 1、2、3电源切除后位迓信息不会丢失.但就垂分辨率就是由二进制得位数来决走得,也就就墨说精度取决 于位K 启前育10位、14位等多种? 1、3混合式绝对值媾码S 混合式绝対值编码器,它输出两组信息:一组信息用于检测磁极位迓滞有绝对信息功能;另一组则完全同堆量JUUI 丸溝迓饿?盘 先敏元作 转轴
绝对式光电编码器基本构造及特点 用增量式光电编码器有可能由于外界的干扰产生计数错误,并且在停电或故障停车后无 法找到事故前执行部件的正确位置。采用绝对式光电编码器可以避免上述缺点。绝对式光电编码器的基本原理及组成部件与增量式光电编码器基本相同,也是由光源、码盘、检测光栅、光电检测器件和转换电路组成。与增量式光电编码器不同的是,绝对式光电编码器用不同的数码来分别指示每个不同的增量位置,它是一种直接输出数字量的传感器。在它的圆形码盘上沿径向有若干同心码道,每条上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有N 位 二进制分辨率的编码器,其码盘必须有N 条码道。绝对式光电编码器原理如图1-8 所示。 绝对式光电编码器是利用自然二进制、循环二进制(格雷码)、二-十进制等方式进行光 电转换的。绝对式光电编码器与增量式光电编码器不同之处在于圆盘上透光、不透光的线条图形,绝对光电编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;电源切除后位置信息不会丢失;编码器的精度取决于位数;最高运转速度比增量式光电编码器高。 图1-8 绝对式光电编码器原理 1.3.2 码制与码盘 绝对式光电编码器的码盘按照其所用的码制可以分为:二进制码、循环码(格雷码)、 十进制码、六十进制码(度、分、秒进制)码盘等。四位二元码盘(二进制、格雷码)如图1-9 所示。图中黑、白色分别表示透光、不透光区域。
光电编码器 速度位置的数据在电机控制中起着非常重要的作用,其检测到的精确性能够直接影响电机控制的精度。速度的测量方法有多种,如感应式转速传感器、测速发电机、光电式转速传感器、霍尔转速传感器以及旋转变压器式转速传感器等。但目前调速系统速度以及位置反馈控制中应用较多的为光电编码器。 光电编码器是一种高精度的数字化检测仪器,是现代伺服系统广泛应用的角位移或者角速度的测量装置,它可以通过光电原理,将一个机械装置的角度或者位移量转化为电信号(数据串或者脉冲信号)。光电编码器可分为绝对式和增量式两种,其中,绝对式光电编码器具有输出信号与旋转信号对应的特点,但是精度欠缺,成本高;增量式光电编码器输出信号为脉冲信号,脉冲个数和相对旋转位移相关,与旋转的绝对位置无关,成本相对于绝对式更低,并且精度高、体积小、响应快、性能稳定等特点。如果预先设置一个基准位置,则可以利用增量式编码器完成绝对式编码器的功能,即也可以测出旋转的绝对位置。 实现绝对式编码器的功能,也即可以测出旋转的绝对位置。增量式光电编码器在高分辨率、大量程角速率、位移的测量中,它更具有优势。因而,在这个手指康复机器人系统中采用增量式光电编码器。 增量式光电编码器主要是由机械系统、数据扫描系统和电气系统三个部分组成。其中机械系统主要负责外壳和转动的支撑作用。电气系统的作用主要是保护、放大、抗干扰以及数据传输等等。 增量式光电脉冲编码器由光源、聚光镜、挡光板、码盘、检测光栅、光电检测器件和转换电路组成。 在光电码盘上刻度盘上均匀分布一定数量的光栅,光挡板(检测光栅)上刻有A、B相两组与光电码盘上光栅相对应的透光缝隙。增量式光电脉冲编码器工作时,光电码盘随着工作轴旋转,但是光挡板(检测光栅)保持不动。有光同时透过光电码盘和检测光栅时,电路中产生逻辑“1”信号,没有透光时产生逻辑“0”信号,从而产生了A、B两相的脉冲信号。由于检测光栅上的A、B相两个透光缝隙的节距与光电码盘上光栅的节距是一致的,并且这两组透光缝隙错开四分之一的节距,从而使得最终信号处理输出的信号存在90°的相位差。在大多数情况下,如若直接由编码器的光电检测器件获取信号,信号的电平较低,波形也不规则,不能适应于信号处理、控制和远距离传输的要求。所以,在编码器内还必须将此信号放大、整形。经过处理的输出信号近似于正弦波或者矩形波。由于矩形波输出信号易于进行数字处理,所以矩形信号输出在定位控制中得到广泛的应用。 正因为增量式光电编码器输出A、B 两相互差90°电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。
增量式光电编码器原理及其结构 增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。一般来说,增量式光电编码器输出A、B 两相互差90°电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。同时还有用作参考零位的Z 相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。标志脉冲通常用来指示机械位置或对积累量清零。增量式光电编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成,如图1-1 所示。码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期;检测光栅上刻有A、B 两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线。它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4 节距,使得光电检测器件输出的信号在相位上相差90°电度角。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差90°电度角的近似于正弦波的电信号,电信号经过转换电路的信号处理,可以得到被测轴的转角或速度信息。增量式光电编码器输出信号波形如图1-2 所示。增量式光电编码器的优点是:原理构造简单、易于实现;机械平均寿命长,可达到几万小时以上;分辨率高;抗干扰能力较强,信号传输距离较长,可靠性较高。其缺点是它无法直接读出转动轴的绝对位置信息。 图 1-2 增量式光电编码器的输出信号波形 1.2.2 基本技术规格 在增量式光电编码器的使用过程中,对于其技术规格通常会提出不同的要求,其中最关 键的就是它的分辨率、精度、输出信号的稳定性、响应频率、信号输出形式。 (1)分辨率 光电编码器的分辨率是以编码器轴转动一周所产生的输出脉冲数来表示的,即脉冲数/转(PPR)。码盘上的透光缝隙的数目就等于编码器的分辨率,码盘上刻的缝隙越多, 编码器的分辨率就越高。在工业电气传动中,根据不同的应用对象,可选择分辨率通常在
光电编码器的原理及应用 2008-09-02 22:51 一、光电编码器的工作原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90o的两路脉冲信号。 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。 (一)增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 (二)绝对式编码器 绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。目前国内已有16位的绝对编码器产品。 绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是: 1.可以直接读出角度坐标的绝对值; 2.没有累积误差; 3.电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,
光电编码器原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。光电编码器每转输出600个脉冲,五线制。其中两根为电源线,三根为脉冲线(A相、B相、Z)。电源的工作电压为(+5~+24V)直流电源。光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判定旋转方向,码盘还可提供相位相差90o的两路脉冲信号。 工作原理:当光电编码器的轴转动时A、B两根线都产生脉冲输出,A、B两相脉冲相差90度相位角,由此可测出光电编码器转动方向与电机转速。假如A相脉冲比B相脉冲超前则光电编码器为正转,否则为反转.Z线为零脉冲线,光电编码器每转一圈产生一个脉冲.主要用作计数。A线用来丈量脉冲个数,B线与A线配合可丈量出转动方向. 设N为电机转速 Δn=ND测-ND理 例如:我们车的速度为1.5m/s,轮子的直径220mm,C=D*Pi,电机控制在21.7转/秒,根据伺服系统的指标,设电机转速为1500转/分,故可求得当ND=21.7*60=130转/分时,光码盘每秒钟输出的脉冲数为: PD=130×600/60=1300个脉冲 当测出的脉冲个数与计算出的标准值有偏差时,可根据电压与脉冲个数的对应关系计算出输出给伺服系统的增量电压△U,经过D/A转换,再计算出增量脉冲个数,等下减往 摘要:位置检测装置作为数控机床的重要组成部分,其作用是检测位移量,并发出反馈信号。在现代数控伺服系统中广泛应用于角位移或角速率的测量。目前生产和使用的数控机床大多采用的是半闭环控制方式。 关键词:光电编码器;角位移;脉冲;传感器 光电编码器是一种旋转式位置传感器,在现代伺服系统中广泛应用于角位移或角速率的测量,它的转轴通常与被测旋转轴连接,随被测轴一起转动。它能将被测
课程设计报告 课程名称:微机原理课程设计 题目:基于51单片机的光电编码器测速
光电编码器是高精度位置控制系统常用的一种位移检测传感器。在位置控制系统中,由于电机既可能正转,也可能反转,所以要对与其相连的编码器输出的脉冲进行计数,要求相应的计数器既能实现加计数,又能实现减计数,即进行可逆计数。其计数的方法有多种,包括纯粹的软件计数和硬件计数。文中分别对这两种常用的计数方法进行了分析,对其优缺点进行了对比,最后提出了一种新的计数方法,利用80C51单片机内部的计数器实现对光电编码器输出脉冲的加减可逆计数,既节省了硬件资源,又能得到较高的计数频率。本设计就是由单片机STC89C52RC芯片,光电编码器和1602液晶为核心,辅以必要的电路,构成了一个基于51单片机的光电编码器测速器。该系统有两个控制按键,分别用于控制每秒的转速和每分钟的转速,并将速度用1602液晶显示出来。该测速器测速精准,具有实时检测的功能,操作简单。 关键词:光电编码器,51单片机,C语言,1602液晶
一、设计任务与要求 (4) 1.1 设计任务 (4) 1.2 设计要求 (4) 二、方案总体设计 (5) 2.1 方案一 (5) 2.2 方案二 (5) 2.3 系统采用方案 (5) 三、硬件设计 (7) 3.1 单片机最小系统 (7) 3.2 液晶显示模块 (7) 3.3 系统电源 (8) 3.4光电编码器电路 (8) 3.5 整体电路 (9) 四、软件设计 (10) 4.1 keil软件介绍 (10) 4.2 系统程序流程 (10) 五、仿真与实现 (12) 5.1 proteus软件介绍 (12) 5.2 仿真过程 (12) 5.3 实物制作与调试 (13) 5.4 使用说明 (14) 六、总结 (15) 6.1 设计总结 (15) 6.2 经验总结 (15) 七、参考文献 (16)
光电编码器电路图 文章出处:https://www.doczj.com/doc/9b6899453.html, 发布时间:| 35 次阅读| 0次推荐| 0条留言 EPC-755A光电编码器 具备良好的使用性能,在角度测量、位移测量时抗干扰能力很强,并具有稳定可靠的输出脉冲信号,且该脉冲信号经计数后可得到被测量的数字信号。因此,我们在研制汽车驾驶模拟器时,对方向盘旋转角度的测量选用EPC-755A光电编码器作为传感器 ,其输出电路选用集电极开路型,输出分辨率选用360个脉冲/圈,考虑到汽车方向盘转动是双向的,既可顺时针旋转,也可逆时针旋转,需要对编码器的输出信号鉴相后才能计数。图2给出了光电编码器实际使用的鉴相与双向计数电路,鉴相电路用1个D触发器和2个与非门组成,计数电路用3片74LS193 组成。 当光电编码器顺时针旋转时,通道A输出波形超前通道B输出波形90°,D触发器输出Q(波形W1)为高电平,Q(波形W2)为低电平,上面与非门打开,计数脉冲通过(波形W3),送至双向计数器 74LS193的加脉冲输入端CU,进行加法计数;此时,下面与非门关闭,其输出为高电平(波形W4)。当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形延迟90°,D触发器输出Q(波形W1)为低电平,Q(波形W2)为高电平,上面与非门关闭,其输出为高电平(波形W3);此时,下面与非门打开,计数脉冲通过(波形W4),送至双向计数器74LS193的减脉冲输入端CD,进行减法计数。 汽车方向盘顺时针和逆时针旋转时,其最大旋转角度均为两圈半,选用分辨率为360个脉冲/圈的编码器,其最大输出脉冲数为900个;实际使用的计数电路用3片74LS193组成,在系统上电初始化时,
光电编码器的工作原理和应用电路 1 光电编码器的工作原理 光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次
数,通过检测2、3脚是否接通就可以判断旋钮是否按下。其具体的鉴相规则如下: 1.A为上升沿,B=0时,旋钮右旋; 2.B为上升沿,A=l时,旋钮右旋; 3.A为下降沿,B=1时,旋钮右旋; 4.B为下降沿,A=O时,旋钮右旋; 5.B为上升沿,A=0时,旋钮左旋; 6.A为上升沿,B=1时,旋钮左旋; 7.B为下降沿,A=l时,旋钮左旋; 8.A为下降沿,B=0时,旋钮左旋。 通过上述方法,可以很简单地判断旋钮的旋转方向。在判断时添加适当的延时程序,以消除抖动干扰。 2 WinCE提供的驱动模型 WinCE操作系统支持两种类型的驱动程序。一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。另一种是具有定制接口的流接口驱动程序。它是一般类型的设备驱动程序。流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。本文讨论的光电编码器就属于流接口设备。 2.1 流设备驱动加载过程 WinCE.NET系统运行时会启动负责流驱动的加载进程DEVICE.exe。DE VICE.exe进程对驱动的加载是通过装载注册表列举器(RegEnum.dll)实现的。在WinCE.NET中,所有设备的资源信息都由OAL负责记录在系统注册表中,RegEnum.dll一个一个扫描注册表项HEKY_LOCAL_MACHINE\Driver\Buil tIn下的子键,发现新设备就根据每个表项的内容进行硬件设备初始化。 2.2 中断与中断处理 如果一个驱动程序要处理一个中断,那么驱动程序需要首先使用CreateEve nt函数建立一个事件,调用InterruptInitialize函数将该事件与中断标识绑定。然后驱动程序中的IST就可以使用WaitForSing|eObject函数来等待中断的发生。在一个硬件中断发生之后,操作系统进入异常处理程序,异常处理程序调用OAL 的OEMInterruptHandler函数,该函数检测硬件并将中断标识返回给系统;系统得到该中断标识便会找到该中断标识对应的事件,并唤醒等待相应事件的线程(I ST),然后IST进行中断处理。处理完成之后,IST需要调用InterruptDone函数来告诉操作系统中断处理结束,操作系统再次调用OAL中的OEMInterruptDone 函数,最后完成中断的处理。图3为WinCE.NET中断处理的流程框图。
光电编码器 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。根据检测原理,编码器可分为光学式、磁式、感应式和 电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。绝对脉冲编码器:APC 增量脉冲编码器:SPC 1.光电编码器原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90°的脉冲信号。 1.1 增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。 增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。一般来说,增量式光电编码器输出A、B两相互差90度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。同时还有用作参考零位的Z相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。标志脉冲通常用来指示机械位置或对积累量清零。 增量式光电编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期;检测光栅上刻有A、B两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线。它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电检测器件输出的信号在相位上相差电度角。当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差电度角的近似于正弦波的电信号,电信号经过转换电路的信号处理,可以得到被测轴的转角或速度信息。 增量式光电编码器的优点是:原理构造简单、易于实现;机械平均寿命长,可达到几万小时以上;分辨率高;抗干扰能力较强,信号传输距离较长,可靠性较高。其缺点是它无法直接读出转动轴的绝对位置信息。 1.1.2 基本技术规格 在增量式光电编码器的使用过程中,对于其技术规格通常会提出不同的要求,其中最关键的就是它的分辨率、精度、输出信号的稳定性、响应频率、信号输出形式。 (1)分辨率
光电编码器原理及应用电路 交直流侍服器补缀 1.光电编码器原理光电编码器,是一种议决光电转换将输出轴上的机器多少位移量转换成脉冲或数字量的传感器。这是如今应用最多的传感器,光电编码器是由光栅盘和光电检测装置构成。光栅盘是在肯定直径的圆板上中分地开通多少个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件构成的检测装置检测输出多少脉冲信号,其原理表示图如图1所示;议决谋划每秒光电编码器输出脉冲的个数就能反应当前电动机的转速。别的,为鉴定旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧 根据检测原理,编码器可分为光学式、磁式、感到式和电容式。根据其刻度要领及信号输出式样,可分为增量式、尽对式以及稠浊式三种。 1.1增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。它的长处是原理布局大略,机器匀称寿命可在几万小时以上,抗滋扰本领强,可靠性高,得当于长隔断传输。其缺点是无法输出轴转动的尽对位置信息。 1.2尽对式编码器 尽对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有多少同心码道,每条道上由透光和不透光的扇形区相间构成,相邻码道的扇区数量是双倍干系,码盘上的码道数便是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于差别位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的恣意位置都可读出一个稳固的与位置相对应的数字码。显然,码道越多,辨别率就越高,对付一个具有 N位二进制辨别率的编码器,其码盘务必有N条码道。如今国已有16位的尽对编码器产品。 尽对式编码器是利用天然二进制或循环二进制(莱码)方法举行光电转换的。尽对式编码器与增量式编码器差别之处在于圆盘上透光、不透光的线条图形,尽对编码器可有多少编码,根据读出码盘上的编码,检测尽对位置。编码的计划可采取二进制码、循环码、二进制补码等。它的特点是: 1.2.1可以直接读出角度坐标的尽对值;
光电编码器工作原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,是目前应用最多的传感器。一般的光电编码器主要由光栅盘和光电检测装置组成。在伺服系统中,由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转(经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理如图所示。通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90?的2个通道的光码输出,根据双通道光码的状态变化确定电机的转向。根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式3种。 1.光电编码器的工作原理 光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90o的两路脉冲信号。 根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。 1.1增量式编码器 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰
The Design and Implementation of Universal Interface Circuit for Photoelectric Encoder Da Li, Hui Zhao, Honglin Xue, An Zou School of Astronautics Harbin Institute of Technology Harbin, Heilongjiang Province, 150001, China zhaohui@https://www.doczj.com/doc/9b6899453.html, Abstract - The majority of encoder signal process circuits only support one type of the specific photoelectric encoder, either absolute encoder or incremental encoder. In order to realize the compatibility for both two types of encoders simultaneously, a novel encoder signal process circuit based on FPGA is presented in this paper. Firstly, a series of universal functions are analyzed and demonstrated. On this basis, the approaches on multiplexing interfaces is designed and verified by simulation. Importantly, the compatibility is solved by multiplexing pins of the IC chip in terms of the hardware interface. As for the software interface, FPGA internal signal acquisition and processing programs deal with the different encoder protocols. Finally, two different types of encoders are concurrently connected to the circuit for system testing. The result indicates that the real-time angular position curve is smooth and the measured angle value is accurately displayed on the host computer. Consequently, the stability and compatibility are successfully proven. Besides, those expensive dedicated interface circuits could be replaced by the proposed circuit, as well as the costs can be significantly reduced. The circuit is ideal for applications requiring high resolution and fast data acquisition in industrial control fields. Index Terms - Photoelectric encoder, signal process circuit, EnDat or SSI interface, FPGA I.I NTRODUCTION Digital drive systems and feedback loops always require fast data transfer with high system reliability from the position sensors [1].Due to high resolution and precision, excellent quality, simple connection and cost optimization, photoelectric encoders are widely applied in radar, turntable, robotics, CNC machine tool and other high precision servo control systems. Depending on differences of the working principle and output signals, generally, photoelectric encoders are mainly divided into two types: Absolute encoders and incremental encoders. As with the output encoder signals, absolute encoders always output serial Gray codes or BCD output as certain communication protocol. And incremental encoders output two-phase square wave pulses, which the number of pulses means the displacement and the phase difference indicates the direction of rotation. Fig.1 shows the coded disk patterns of the incremental encoder and absolute encoder. Therefore, the photoelectric encoder interfaces require the corresponding subsequent electronic equipment to receive and process the output encoder signals, for the host computer or the servo motor in close-loop systems. Generally, most encoder signal process circuits could only handle with one type of the specific encoder interface, i.e., either the absolute encoder or the incremental encoder. In recent years, encoder manufacturers have developed their dedicated encoder signal process circuits, which could convert the serial output data of the encoder into parallel data for motor drive or controller. For instance, the famous German Corporation HEIDENHAIN has a world-wide high reputation for producing encoders with high precision in the field of position measurement. The interpolation and counter card IK220 is designed by HEIDENHAIN. It could support two protocols including EnDat and SSI and its current version only supports up to two channels of encoders. However, it lacks functions of the conversion from the Gray code to BCD. To some degree, such circuits are too expensive [2]. Fig. 1 Coded disk patterns of the incremental encoder and absolute encoder Therefore, if one single hardware interface for both absolute and incremental encoders can be accomplished, by multiplexing pins for the differential signals, the versatility will be much enhanced. What’s more, some early-designed circuits are quite large and complicated, meanwhile, along with the defects of more power consumption and poor reliability [3].Thus, utilizing FPGA instead of discrete electric components will be more preferable and efficient. The encoder interface protocols mainly comprise EnDat or SSI protocol for absolute encoders, as well as quadrature signals for incremental encoders. For instance, SSI is one digital bidirectional protocol, which supplies the absolute position value in synchrony with one clock pulse from the subsequent circuit. When the resolution of the encoder is determined, the number of transmitting pulses per clock cycle is also fixed. Furthermore, EnDat interface is greatly improved based on SSI. Fig.2 is the data transmission timing diagram of EnDat 2.1. It is capable of transmitting position values from absolute encoders, updating information stored in the encoder, Proceeding of the 11th World Congress on Intelligent Control and Automation Shenyang, China, June 29 - July 4 2014