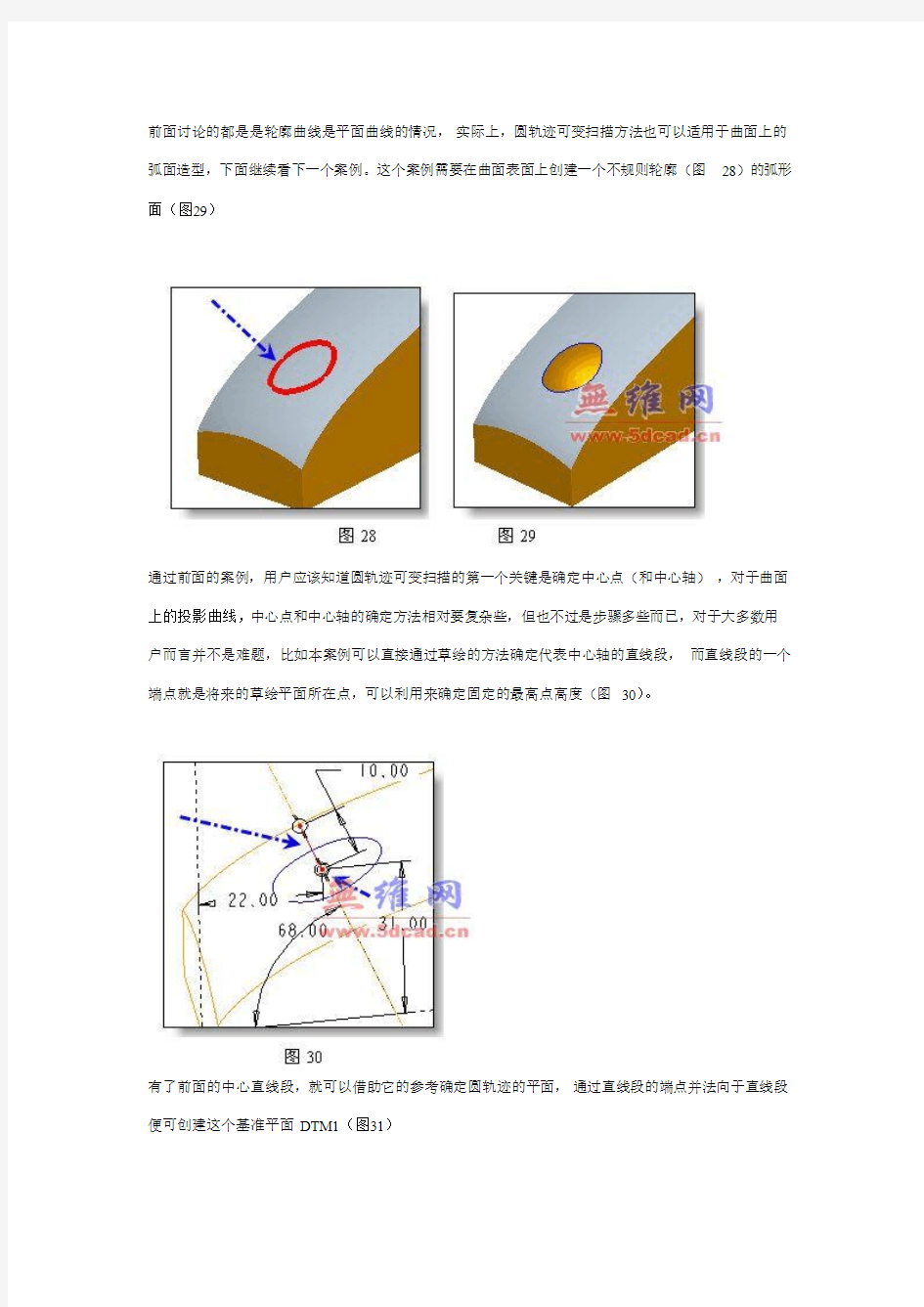

前面讨论的都是是轮廓曲线是平面曲线的情况,实际上,圆轨迹可变扫描方法也可以适用于曲面上的弧面造型,下面继续看下一个案例。这个案例需要在曲面表面上创建一个不规则轮廓(图28)的弧形面(图29)
通过前面的案例,用户应该知道圆轨迹可变扫描的第一个关键是确定中心点(和中心轴),对于曲面上的投影曲线,中心点和中心轴的确定方法相对要复杂些,但也不过是步骤多些而已,对于大多数用户而言并不是难题,比如本案例可以直接通过草绘的方法确定代表中心轴的直线段,而直线段的一个端点就是将来的草绘平面所在点,可以利用来确定固定的最高点高度(图30)。
有了前面的中心直线段,就可以借助它的参考确定圆轨迹的平面,通过直线段的端点并法向于直线段便可创建这个基准平面DTM1(图31)
使用DTM1作为草绘平面并在其上以直线段的端点做圆心草绘一个类似图32大小的圆,然后以这个圆做原始轨迹,、轮廓曲线作为轨迹进行可变扫描(图33)
草绘的截面使用一段圆弧构成,圆弧的两个端点分别在外轮廓轨迹的交点和同直线段参考的中心线上,并且圆心也在这条中心线上以保证截面是法向于中心的直线段的,同样需要按照前面所说的标注了截面最高点和圆轨迹曲线所在的平面的距离尺寸,以保证这个最高点位置在可变扫描过程中是保存不变的(图34),最后完成草绘截面退出便可得到要创建的弧形面了(图35)。
前面说过一般不建议对于有凹凸变化的轮廓曲线使用圆轨迹可变扫描方法,但对于凹凸变化不是太夸张,并且轮廓曲线长宽相差不大的情况,在截面中通过适当的约束方法还是可以得到比较光滑的高质量曲面的,如下图案例(图36),通过采用合适的草绘截面可以得到比较满意的效果(图37)。
对于这种有明显内凹变化的轮廓曲线(图38),如果直接使用普通的圆轨迹可变扫描截面构成方法,得到的曲面会在内凹对应的部分产生明显的痕迹,越靠近中心轴越明显(图39)。这是因为对于有内凹部分的轮廓曲线,从外凸到内凹的变化过程相对于其它部分的变化总是快的多的,这点变化更容易体现在中心附近。
要改善这一点,需要借鉴一般的构面方法,如果不使用圆轨迹可变扫描方法,这样的曲面在
Pro/Engi neer中的构建方法通常都是首先在顶部旋转一个球面,然后通过剪切留下中间的一小部分,然后再补上周边的曲面,这样的好处就是保证了在中心轴部分的曲面(单一曲率的球面)。实际上,圆轨迹可变扫描方法可以照搬这个处理方法,首先增加一条辅助曲线,这条曲线形状可以参考外轮廓曲线的形状,有的情况下甚至可以直接偏移然后倒圆角,将来在这条曲线的内部曲面就是球面。然后使用圆做原始轨迹,外轮廓曲线和这条辅助曲线作为轨迹进行可变扫描(图41)
进入草绘环境,草绘的截面构成是关键,通过辅助轨迹和截面的交点创建一条竖直的中心线,然后创建一段圆心在中心轴参考线上、两个端点分别在中心轴参考线和竖直辅助中心线上、半径为120的圆
弧(图42),并且标注其中一个端点的高度是12,这样处理的目的就是保证了在扫描的过程中,在辅助曲线内的部分曲面始终为半径120的球面。
至于在这里取120只是一个概数,根据这个形状特点大概确定的一个值,用户在确定这个值的时候需要综合考虑在扫描的整个过程中中心轴离外轮廓的交点距离的变化,均衡考虑确定一个合适的值,太大的值会导致顶部太平(图43),太小的值(扫描过程中圆弧延伸至交点水平线上的交点在外轮廓曲线交点之内)甚至会导致扫描失败(图44)。
完成截面就可以得到最后的可变扫描结果曲面(图45)。
在前面的操作中,是通过直接草绘一条辅助曲线的方法来控制中间的球面部分的,实际上这一步可以省略,可以直接通过草绘关系来实现,借助已知尺寸,可以通过简单关系控制中间固定半径大小的圆弧范围,如图46所示添加关系sd12=0.3*kd4,就可以实现中间部分的球面跟随外轮廓曲线做比例变化从而实现球面的边界和外轮廓曲线相似。
通过这样的处理可以得到如下结果曲面(图47),可以看到效果和上面的是一样的。
运用类似的方法还可以处理下面这个经典的六角星面(图48)。
本文档来自无维网,仅供个人参考不可用于商业用途,违者后果自负
课题:与圆有关的轨迹方程 北京市第八十中学 王伟 一、教学时间:10.27 二、教学目标: 1、掌握求曲线的方程的一些常见方法; 2、建立数形结合思想,培养学生运用解析几何的基本思想方法; 3、培养学生的创新意识, 提高学生的分析问题、解决问题的能力; 三、教学重难点: 重点:求与圆有关的轨迹方程的方法; 难点:建立动点坐标之间的等量关系; 四、教学用具:计算机、投影仪、圆规、三角板; 五、教学过程: (一)复习提问导入新课: 1什么叫曲线的方程、方程的曲线? 2求曲线的方程的步骤是什么? 学生回答 教师点评:明确解析几何的基本思想方法是在坐标系的基础上,用坐标表示点,用方程表示曲线,通过方程的特征间接地来研究曲线的性质。其主要问题是1、根据已知条件求曲线的方程,2、通过方程研究平面曲线的性质。 (二)新课: 今天我们一起来研究与圆有关的轨迹方程; 例1已知定点A (6,0),点B 是圆 2+y x 求点P 的轨迹方程。 解法一:作PQ ∥OB 交x 轴于点Q , ∵P 为AB 中点,∴PQ 为△OAB 的中位线 ∴Q(3,0),|PQ|= OB 21 ∴|PQ|=2 3,由圆的定义知,P 在以Q (3,0)为圆心,半径r=|PQ|=23的圆上,∴点P 的轨迹方程是:49)3(22=+-y x ; 1、解法一由学生探讨,寻求解答,展示思维过程; 2、教师点评,总结解法一:定义法; 用计算机演示动点P 的轨迹图形,学生观察运动变化规律。 教师提问:例1的解答还有其他方法吗? 学生观察分析:动点P 的轨迹依赖圆上点B 的变化;
解法二:设P ),(),,(11y x B y x ,由中点坐标公式得: ?? ???+=+=202611y y x x ∴???=-=y y x x 26211∵B ),(11y x 在圆922=+y x 上,∴92121=+y x ∴9)2()62(22=+-y x ∴4 9)3(22=+-y x 教师总结解法二:坐标转移法,并把例1进行的拓展: 变化A 点的位置探求点P 的轨迹方程(1) A 在圆上 (2)A 在圆内 变化P 点位置探求点P 的位置关系(1)P 分AB 的比为2:1 (2)P 在的延长线上,使BP AB = 学生回答在上述四种情况中如何解答? 例2 自圆外一点A (6,0)引圆922=+y x 的割线ABC ,求弦BC 的中点P 的轨迹方程。 定义法 解法一:∵OP ⊥AP,取OA 中点M 则M(3,0),|PM|=3, 由圆的定义得P 点轨迹方程为0622=-+x y x 几何法 1 解法二:设P ),(y x ,连OP ,则OP ⊥BC 14 ,-=-?⊥x y x y k k BC OP 即,即0422=-+x y x ,当0=x 时P 点坐标为(0,0)是方程的解,∴BC 中点P 的轨迹方程为0422=-+x y x (在圆的内部分) 几何法2 解法三 :设P ),(y x ,连OP ,=),(y x ,=),6(y x --,∵⊥, ∴·=0,0)()6(=-+-y y x x ,0622=-+x y x (在圆的内部分) 几何法2 解法四 :设P ),(y x ,连OP ,OP =),(y x ,PA =),6(y x --,∵OP ⊥PA , ∴OP ·=0,0)()6(=-+-y y x x ,0622=-+x y x (在圆的内部分) 坐标转移法 解法五:设 ),,(),,(2211y x C y x B ),(y x P 则 4212 1=+y x …..①
求圆的轨迹方程练习 1、 点P 00(,)x y 是圆224x y +=上的动点,点M 为OP (O 为原点)中点,求 动点M 的轨迹方程。 2、 已知两定点A(-2,0)、B(1,0),若动点P 满足|PA |=2|PB |,则点P 轨迹方程所包围的图形面积等于 3、 等腰三角形ABC 底边一个端点B(1,-3),顶点A(0,6),求另一个端点C 的轨迹方程。 4、设A 为圆22(1)1x y -+=上的动点,PA 是圆的切线且|PA |=1,求P 的轨迹方程。 5、 已知BC 是圆2225x y +=的动弦,且|BC |=6,求BC 中点轨迹方程。 6、 长为2a 的线段AB 的两个端点A 和B 分别在x 轴和y 轴上滑动,求线 段AB 的中点的轨迹方程。 7、 已知点M 与两个定点O (0,0),A(3,0)的距离的比为12 ,求点M 的轨迹方程。 8、 已知半径为1的动圆与圆22(5)(7)16x y -++=相切,求动圆圆心轨迹方程。 9、 点A(0,2)是圆2216x y +=内定点,B,C 是这个圆上的两动点,若BA CA ⊥, 求BC 中点M 的轨迹方程,并说明它的轨迹。 10、 已知点M (x,y )与两个定点A 、B 距离的比是一个正数m ,求点M 的 轨迹方程,并说明轨迹是什么图形(考虑 11m m =≠和两种情形) 1、22x y 1+= 2、4π 3、22(6)82x y +-=(除(-1,15)、(1,-3)) 4、22(1)2x y -+= 5、2216x y += 6、222x y a += 7、 224x+1y +=() 8、22(5)(7)x y 25-++=或22(5)(7)x y 9-++= 9、解法一:设BC 中点M (x,y)
可变截面扫描-指令详细解说 不管版本如何变更,可变扫出始终是我比较偏爱的造型指令。这是因为可变扫出除了可以得到相对规则的曲面外,它丰富的控制属性和可以预见的结果形状让它更能在适当的场合发挥作用。 可变扫出的控制主要有下面的几项:轨迹,截面的定向和截面的形状 1.轨迹 在可变扫出中有两类轨迹,有且只有一条称之为原始轨迹(Origin)也就是你第一条选择的轨迹。原始轨迹必须是一条相切的曲线链(对于轨迹则没有这个要求)。除了原始轨迹外,其它的都是轨迹,一个可变扫出指令可以有多条轨迹。在wildfire以后的版本中,原始轨迹和轨迹的功能性差异除了这点外可以说没有任何差异了;截面的定向依赖于两个方向的确定:Z方向和X方向。 注意看上面的图片你会发现在每条轨迹后面都有三个可选项分别用X,N和T作标题,它们分别代表的是X向量,Normal(垂直方向也就是Z方向)以及T angency切向参考,在对应的方框内打勾就表明采用该选项;显然对于可变扫出只能有一个X向量和一个Z方向,所以你选择了某个轨迹后会自动曲线其它轨迹中对应的选择;对于切向参考,因为一条轨迹很可能是两面链的交线,所以有两个框来供你选择不同的面链。当然你也可以手工选择作为切向参考的面链。在下面的Section Plane Control下拉框中,你可以选择你的截面的定向方法,缺省是Norma To Trajectory是由轨迹来确定截面的定向,但是你也可以用其它两个选项来确定:
最下面就是水平竖直方向的确定,这可以在Horzontal/Vertical Control下拉框中进行选择。 下面就来具体看一下各种组合的截面定向方法的表现形式:
与圆有关的轨迹问题 1. 动点P 与定点A(-1,0),B(1,0)的连线的斜率之积为-1,则点P 的轨迹为( ) A.221x y += B. ()2 2 11x y x +=≠± C. ()2 2 11x y x +=≠ D. ()2 2 10x y x +=≠ 2. 点P (4,-2)与圆x 2+y 2=4上任一点连线的中点的轨迹方程是( ) A .(x -2)2+(y +1)2=1 B .(x -2)2+(y +1)2=4 C .(x +4)2+(y -2)2=4 D .(x +2)2+(y -1)2=1 3. 设点A 为圆(x -1)2+y 2=1上的动点,P A 是圆的切线,且|P A |=1,则点P 的轨迹方程为( ) A .y 2=2x B .(x -1)2+y 2=4 C .y 2=-2x D .(x -1)2+y 2=2 4. 已知两定点A(-2,0),B(1,0),如果动点P 满足|P A|=2|P B|,则点P 的轨迹所包围的图形的面积等于________. 5. 自A(4,0)引圆x 2+y 2=4的割线ABC ,求弦BC 中点P 的轨迹方程. 6. 已知动点M 到点A(2,0)的距离是它到点B(8,0)的距离的一半. (1)求动点M 的轨迹方程; (2)若N 为线段A M 的中点,试求点N 的轨迹. 7. 已知线段AB 的长为4,且端点A ,B 分别在x 轴与y 轴上,则线段AB 的中点M 的轨迹方程为________.
8. 点P(4,﹣2)与圆x2+y2=4上任一点连线的中点轨迹方程是() A. (x﹣2)2+(y+1)2=1 B.(x﹣2)2+(y+1)2=4 C. (x+4)2+(y﹣2)2=1 D.(x+2)2+(y﹣1)2=1 9. 已知△ABC的边AB长为2a,若BC边上的中线为定长m,求顶点C的轨迹. 10. 在平面直角坐标系xOy中,已知圆P在x轴上截得线段长为22,在y轴上截得线段长为2 3. (1)求圆心P的轨迹方程; (2)若P点到直线y=x的距离为 2 2,求圆P的方程. 11. 已知圆的方程是x2+y2-2ax+2(a-2)y+2=0,其中a≠1,且a∈R. (1)求证:a取不为1的实数时,圆过定点; (2)求圆心的轨迹方程. 12. 设定点M(-3,4),动点N在圆x2+y2=4上运动,以OM,ON为邻边作平行四边形MONP,求点P的轨迹. 13. 已知圆x2+y2=4上一定点A(2,0),B(1,1)为圆内一点,P,Q为圆上的动点. (1)求线段AP中点的轨迹方程; (2)若∠PBQ=90°,求线段PQ中点的轨迹方程.
圆锥曲线轨迹方程的解法 目录 一题多解 (2) 一.直接法 (3) 二. 相关点法 (6) 三. 几何法 (10) 四. 参数法 (12) 五. 交轨法 (14) 六. 定义法 (16)
一题多解 设圆C :(x -1)2+y 2=1,过原点O 作圆的任意弦OQ ,求所对弦的中点P 的轨迹方程。 一.直接法 设P (x,y ),OQ 是圆C 的一条弦,P 是OQ 的中点,则CP ⊥OQ ,x ≠0,设 OC 中点为M (0,21),则|MP |=21|OC |=21,得(x -21)2+y 2=41 (x ≠0),即点P 的 轨迹方程是(x -21)2+y 2=41 (0<x ≤1)。 二.定义法 ⊥⊥OPC =90°,⊥动点P 在以M (0,2 1 )为圆心,OC 为直径的圆(除去原点 O )上,|OC |=1,故P 点的轨迹方程为(x -21)2+y 2=41 (0<x ≤1) 三.相关点法 设P (x,y ),Q (x 1,y 1),其中x 1≠0, ⊥x 1=2x,y 1=2y ,而(x 1-1)2+y 2=1 ⊥(2x -1)2+2y 2=1,又x 1≠0, ⊥x ≠0,即(x -21)2+y 2=41 (0<x ≤1) 四.参数法 ①设动弦PQ 的方程为y=kx ,代入圆的方程(x -1)2+kx 2=1, 即(1+k 2)x 2-2x =0,⊥.12 221k x x +=+ 设点P (x,y ),则2 2211],1,0(112k k kx y k x x x +==∈+=+= 消去k 得(x - 21)2+y 2=4 1 (0<x ≤1) ②另解 设Q 点(1+cos θ,sin θ),其中cos θ≠-1,P (x,y ), 则,2sin ],1,0(2cos 1θθ=∈+= y x 消去θ得(x -21)2+y 2=4 1 (0<x ≤1)
求与圆有关的轨迹方程 [概念与规律]求轨迹方程的基本方法。 (1)直接法:这是求动点轨迹最基本的方法,在建立坐标系后,直接根据等量关系式建立方程。 (2)转移法(逆代法):这方法适合于动点随已知曲线上点的变化而变化的轨迹问题,其步骤是:设动点M(x,y),已知曲线上的点为N (x o, y o), 求出用x,y表示x o,y o的关系式,将(x o, y o)代入已知曲线方程,化简后得动点的轨迹方程。 (3)几何法:这种方法是根据已知图形的几何性质求动点轨迹方程。 (4)参数法:这种方法是通过引入一个参数来沟通动点(x,y)中x,y之间的关系,后消去参数,求得轨迹方程。 (5)定义法:这是直接运用有关曲线的定义去求轨迹方程。 [讲解设计]重点和难点 例1 已知定点A(4,o ),点B是圆x2+y2=4上的动点,点P分AB的比为2:1,求点P的轨迹方程。 例2 自A(4,0)引圆x2+y2=4的割线ABC求弦BC中点P的轨迹方程。 方法一:(直接法)设P(x,y),连接OP则OPL BC 』-=一止 当x^0 时,k op ■ k AP=—1,即TT x—4 即x2+ y2—4x = O.① 当x= O时,P点坐标(0,0)是方程①的解, BC中点P的轨迹方程为x2+ y2—4x= O(在已知圆内的部分). 方法二:(定义法) 由方法一知OPtAP,取OA中点M 则M2,0), |PM =2 I OA = 2, 由圆的定义知,P的轨迹方程是(x —2)2+ y2= 4(在已知圆内的部分). 例3 已知直角坐标平面上的点Q(2, 0)和圆C: x2+y2=1,动点M到圆C的切线长与|MQ|的比等于常数 (0),求动点M的轨迹方程,并说明它表示什么曲线。 设直线MN切圆于N,则动点M组成的集合是:P={M||MN|= J'|MQ|} T圆的半径|ON|=1,二|MN|2=|MO|2-|ON|2=|MO|2-1 , 设点M的坐标为(x, y),则j 整理得(x-4)2+y2=7 . ???动点M的轨迹方程是(x-4 )2+y2=7 . 它表示圆,该圆圆心的坐标为(4 , 0),半径为越 例4 如图,已知两条直线11:2x-3y+2=0 , I2: 3x-2y+3=0,有一动圆(圆心和半径都在变化)与丨1,丨2都相交, 并且I 1与I 2被截在圆内的两条线段的长度分别是26和24,求圆心M的轨迹方程。 设动圆的圆心为M(x,y),半径为r,点M到直线1* 2的距离分别为d1和dz 由弦心距、半径、半弦长间的关系得,
可变截面扫描(Variable Section Sweep),单从名字来看我们就知道它的精髓在于一个可变。这是因为可变截面扫描除了可以得到相对规则的曲面外,它丰富的控制属性和可以预见的结果形状让它更能在适当的场合发挥作用。 3.6.1.可变截面扫描(Variable Section Sweep)的构成 可变截面扫描的控制主要有下面的几项:轨迹(Trajectory),截面的定向和截面的形状。 轨迹,在可变截面扫描中有两类轨迹,有且只有一条称之为原始轨迹(Origin)也就是你第一条选择的轨迹,原始轨迹必须是一条相切的曲线链(对于轨迹则没有这个要求),原始轨迹是确定扫描过程中截面的原点的。除了原始轨迹(Origin)外,其它的都是轨迹,一个可变截面扫描指令可以有多条轨迹。在WildFire3.0以后的版本中,原始轨迹和轨迹的功能性差异除了这点外可以说没有任何差异了,截面的定向依赖于两个方向的确定:Z方向和X方向。 注意看上面的图片你会发现在每条轨迹后面都有三个可选项分别用X,N和T作标题,它们分别代表的是X向量,Normal(垂直方向也就是Z方向)以及Tangency切向参考,在对应的方框内打勾就表明采用该选项。 很多用户对X向量的理解都比较迷惑,对于它的具体含义总是无法完全把握,其实它的含义并不复杂,我们知道可变扫描是一定有一条原始轨迹的,这个原始轨迹确定了扫描过程中的截面原点,
而X向量相当于决定了截面坐标的X轴上的另一个点,过这两个点确定的直线就是截面的X轴了。X 轴确定了Y轴也就相当于确定了,这就是X向量的几何意义;而当留空X向量的时候,系统就会自动根据原始轨迹的法向向量来确定截面的X轴了。 显然对于可变截面扫描只能有一个X向量和一个Z方向,所以你选择了某个轨迹后会自动定义曲线为其它轨迹中对应的选择。对于切向参考,因为一条轨迹很可能是两面链的交线,所以有两个框来供你选择不同的面链,当然你也可以手工选择作为切向参考的面链。 图vss.1.05参考(vss/vss-01.prt) 在下面的Section Plane Control(截面平面控制)下拉框中,你可以选择你的截面的定向方法,缺省是Norma To Trajectory是由轨迹来确定截面的定向,但是你也可以用其它两个选项来确定: Normal To Projection(垂直于投影):可以控制你的截面垂直于轨迹在平面上的投影。Constant Normal Direction(恒定垂直向量):截面法向始终和给定的方向平行,方向可以用轴,直线或平面法向来确定,如使用平面作参考则在整个扫出过程截面始终和指定平面平行。
专题一求圆的轨迹方程 教学目标: 1、掌握直线与圆的标准方程与一般方程,能根据问题的条件选择适当的 形式求圆的方程; 2、掌握直线与圆的位置关系,可以应用直线与圆的位置关系求圆的方程 3、理解圆的标准方程与一般方程之间的关系,会进行互化。 教学重难点: 1、掌握圆的标准方程与一般方程,能根据问题的条件选择适当的形式求圆 的方程; 2、会求曲线的轨迹方程(圆) 教学过程: 第一部分知识点回顾 一、圆的方程 : 1 .圆的标准方程:x a? y b 2 r2o 2 ?圆的一般方程:x2 y2 Dx Ey F 0(D2+ E2—4F 0) 特别提醒:只有当D2+ E2—4F 0时,方程x2 y2 Dx Ey F 0才表示圆心为(D, E),半径为1~E2~4F的圆 2 2 2 思考:二元二次方程Ax2 Bxy Cy2 Dx Ey F 0表示圆的充要条件是什么? 答案:(A C 0,且 B 0 且D2 E2 4AF 0 ));
3 .圆的参数方程:y a r s°s (为参数),其中圆心为(a,b),半径为 r 。圆的参数方程的主要应用是三角换元: (3) 已知P( 1, -3)是圆y ;;煮(为参数,0 2 )上的点,则圆的 普通方程为,P 点对应的 值为,过P 点的圆的切线方程是 (答:x 2 y 2=4 ; — ; x ,3y 4 0); 3 (4) 如果直线l 将圆:x 22-240平分,且不过第四象限,那么I 的斜率 的取值范围是_ (答: [0 , 2]); (5) 方程x 22 - 0表示一个圆,则实数k 的取值范围为(答:k 丄); (6) 若 M {(x, y) | y 3sos (为参数,0 )}, N (x, y) | y x b , 若MN ,则b 的取值范围是(答:-33& ) 二、点与圆的位置关系:已知点M x 0 ,y 0 及圆C: x-a $ y b ? r 2 r 0 , (1) 点 M 在圆 C 外 |CM | r x 0 a 2 y 。b 2 r 2; (2) 点 M 在圆 C 内 CM| r x 0 a 2 y 。b 2 r 2; (3) 点 M 在圆 C 上 CM r x 0 a $ y 0 r 2。女口 点P(5a+1,12a)在圆(x -1 )2 + y 2=1的内部,则a 的取值范围是(答: 2 ^22, r x r cos , y r sin ; x y t x r cos ,y r sin (0 r .,t)。 X i ,y i ,B X 2,y 2为直径端点的圆方程 x x 1 x X 2 y y 1 y y 2 0 如 (1) 圆C 与圆(X 1)2 y 2 1关于直线y x 对称, 则圆 C 的方程为 (答: x 2 (y 1)2 1); (2) 圆心在直线2x y 3上,且与两坐标轴均相切的圆的标准方程是 (答: (x 3)2 (y 3)2 9或(x 1)2 (y 1)2 1 );
一类动点轨迹问题的探求 专题来源:学习了“椭圆的标准方程”后,对于,我们可以进一步研究: 2PA PB a +=,各自的轨迹方程如何? 2,2, 2PA PA PB a PA PB a a PB -=== 引例:已知点与两定点的距离之比为,那么点的坐标应满足什(,)M x y (0,0),(3,0)O A 1 2 M 么关系?(必修2 P103 探究·拓展) 探究 已知动点与两定点、的距离之比为,那么点的轨迹是什么? M A B (0)λλ>M 背景展示 阿波罗尼斯是古希腊著名数学家,与欧几里得、阿基米德被称为亚历山大时期数学三巨匠,他对圆锥曲线有深刻而系统的研究,主要研究成果集中在他的代表作《圆锥曲线》一书,阿波罗尼斯圆是他的研究成果之一 类题1: (1994,全国卷) 已知直角坐标平面上点Q (2,0)和圆C :x 2+y 2=1,动点M 到圆C 的切线长与|MQ |的比等于常数λ(λ>0).求动点M 的轨迹方程,说明它表示什么曲线. 本小题考查曲线与方程的关系,轨迹概念等解析几何的基本思想以及综合运用知识的能力. 解:如图,设MN 切圆于N ,则动点M 组成的集合是 P={M ||MN |=λ|MQ |},式中常数λ>0. ——2分 因为圆的半径|ON |=1,所以|MN |2=|MO |2-|ON |2=|MO |2-1. ——4分 设点M 的坐标为(x ,y ),则 ——5分 ()222 2 21y x y x +-=-+λ整理得(λ2-1)(x 2+y 2 )-4λ2x +(1+4λ2)=0. 经检验,坐标适合这个方程的点都属于集合P .故这个方程为所求的轨迹方程. ——8分
与圆有关的轨迹方程 的求法
与圆有关的轨迹方程的求法 若已知动点P 1(α ,β)在曲线C 1:f 1(x,y )=0上移动,动点P (x,y )依动点P 1而动,它满足关系: ? ??βα=βα=),(),(y y x x ① 则关于α 、β反解方程组①,得???=β=α) ,(),(y x h y x g ② 代入曲线方程f 1(x,y )=0,即可求得动点P 的轨迹方程C :f (x,y )=0. 例1、(求轨迹):已知线段AB 的端点B 的坐标是(4,3),端点A 在圆4)1(22=++y x 上运动,求线段AB 的中点M 的轨迹方程. 【例2】已知点A (3,0),点P 在圆x 2+y 2=1的上半圆周上,∠AOP 的平分线交PA 于Q ,求点Q 的轨迹方程. 【法一】如图所示,设P (x 0,y 0)(y 0>0),Q (x ,y ). ∵OQ 为∠AOP 的平分线,∴ 3 1||||==OQ OP QA PQ , ∴Q 分PA 的比为31 .
∴???????=-=????? ??????=+?+=+=+?+=y y x x y y y x x x 3413443311031)1(43311313000000即 又因2020y x +=1,且y 0>0,∴19164391622 =+??? ??-y x . ∴Q 的轨迹方程为)0(16 9)43 (22>=+-y y x . 例3、已知圆,422=+y x 过A (4,0)作圆的割线ABC ,则弦BC 中点的轨迹方程为( ) A .4)1(22=+-y x B .)10(4)1(22<≤=+-x y x C .4)2(22=+-y x D .)10(4)2(22<≤=+-x y x 变式练习 1:已知定点)0,3(B ,点A 在圆122=+y x 上运动,M 是线段AB 上的一点,且 3 1=,则点M 的轨迹方程是 解:设),(),,(11y x A y x M .∵31=,∴),3(3 1),(11y x y y x x --=--, ∴???????-=--=-y y y x x x 31)3(3111,∴??? ????=-=y y x x 3413411.∵点A 在圆122=+y x 上运动,∴ 12121=+y x ,∴1)34()134(22=+-y x ,即16 9)43(22=+-y x ,∴点M 的轨迹方程是16 9)43(22=+-y x . 2:已知定点)0,3(B ,点A 在圆122=+y x 上运动,AOB ∠的平分线交AB 于点M ,则点M 的轨迹方程是 .
可变截面扫描 一、可变截面扫描的机理 可变截面扫描命令所得到的实体或曲面特征,是以所选的原始轨迹作为截面的原点轨迹,以其他所选的轨迹链作为限制轨迹。在扫描时,沿着原始轨迹通过控制截面的方向、旋转和几何来添加或移除材料进行渐进扫描而得到的实体或曲面。可变截面扫描,单从名字来看,我们就知道它的精髓在于一个可变。这是因为可变截面扫描除了可以得到相对规则的曲面外,它丰富的控制属性和可以预见的结果形状让它更能在适当的场合发挥作用。 二、可变截面扫描命令的启动 在Pro/E5.0处于模型创建状态下,插入→可变截面扫描,这时软件会出现可变截面扫描命令操控面板如图1所示。 图1:可变截面扫描命令操控面板 三、可变截面扫描的构成 可变截面扫描的控制主要有下面的几项:1、轨迹;2、截面的定向;3、截面的形状 1.轨迹 可变截面扫描的轨迹有两 类:①原始轨迹:也就是你选择 的第一条轨迹,有且仅有一条原 始轨迹。原始轨迹必须是一条相 切的曲线链(对于限制轨迹则没 有这个要求),它是确定扫描过 程中截面原点的,也就是说可变 截面扫描所得到的特征或曲面 的所有截面的原点形成的曲线 就是原始轨迹。②限制轨迹:限 制轨迹用于限制所得特征的外 形。只有当截面与限制轨迹有约 束关系时,限制轨迹才可以限制 所得特征的外形,否则限制轨迹 失效。图1:参照滑出面板 2.截面的定向
截面的定向依赖于其X方向和Z方向的确定。在pro/e5.0中,可变截面扫描环境下,参照滑出面板中,如果你选择轨迹后,在每个轨迹后都会有三个选项X(x向量)、N(Normal,垂直方向也就是Z方向)以及T(Tangency,切向参考),在相应的方框内打勾就表明采用该选项。在可变截面扫描中,过原始轨迹上的点作平面,所作的平面称为可变截面扫描特征的剖面,如果过原始轨迹上所有的点,从起点到终点作剖面就形成了可变截面扫描特征的剖面组。 剖面控制就是对上述的所有剖面进行选择和控制,也就是对截面的Z方向进行选择和控制。其选项有三种(如图2所示): a、垂直于轨迹 该选项的意义是:为了控制剖面组的Z方向,要求剖面组中所有剖面都垂直于轨迹。至于垂直于哪个一条轨迹,系统让我们自己进行选择,即可以选择垂直于原始轨迹,也可以选择垂直于限制轨迹,默认是垂直于原始轨迹。选择的方法是:在剖面控制中选择垂直于轨迹后,回到轨迹选项组中,在对应的轨迹后选择N列中的复选框,以确认剖面所垂直的轨迹。 当选择了垂直于轨迹后,将出现水平/垂直控制选择项,这个选择项用于控制剖面的X 方向。有两个选择(如图3所示): 第一个是X轨迹,系统要求选择一条轨迹作为X轨迹。X轨迹的几何意义是:在剖面组中,与X轨迹第一次相交时的剖面,作为定义截面时的草绘平面。用草绘平面与原始轨迹的交点作为草绘平面的原点。用草绘平面与X轨迹的交点,与草绘平面原点的连线作为草绘平面的X轴。X轴确定了,草绘平面的Y轴自然也就确定了,整个草绘平面也就完全控制了。 第二个是自动。如果原始轨迹是一个平面内的曲线,则将该平面的X轴作为草绘平面的X轴,以对剖面组及草绘平面进行控制。 图2:剖面控制选项图3:水平/垂直控制选项 b、垂直于投影。 该选项的意义是:为了控制剖面组的Z方向,要求剖面组中所有剖面都垂直于轨迹在平面上的投影。当选取该选项时,系统要求选取一个平面、轴、坐标系轴或直图元来定义投影方向。如果选择的是平面则将该平面作为投影平面,剖面组中所有剖面都垂直于该投影平面。如果选择的是轴或直图元,则将轴或直图元作为投影方向,剖面组中所有剖面都平行于该投影方向。 图4:垂直于投影的选项组图5:垂直于恒定法向的选项组 c、恒定法向法向。 该选项的意义是:为了控制剖面组的Z方向,要求剖面组中所有剖面的法向都为指定平
与圆的轨迹方程文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
求与圆有关的轨迹方程 [概念与规律] 求轨迹方程的基本方法。 (1)直接法:这是求动点轨迹最基本的方法,在建立坐标系后,直接根据等量关系式建立方程。 (2)转移法(逆代法):这方法适合于动点随已知曲线上点的变化而变化的轨迹问 题,其步骤是:? 设动点M(x,y),已知曲线上的点为N(x 0,y ), ? 求出用x,y表示x 0,y 的关系式, ? 将(x 0,y )代入已知曲线方程,化简后得动点的轨迹方程。 (3)几何法:这种方法是根据已知图形的几何性质求动点轨迹方程。 (4)参数法:这种方法是通过引入一个参数来沟通动点(x,y)中x,y之间的关系,后消去参数,求得轨迹方程。 (5)定义法:这是直接运用有关曲线的定义去求轨迹方程。 [讲解设计]重点和难点 例1 已知定点A(4, 0),点B是圆x2+y2=4 上的动点,点P分AB的比为2:1,求点P的轨迹方程。 例2 自A(4,0)引圆x2+y2=4的割线ABC,求弦BC中点P的轨迹方程。 方法一:(直接法)设P(x,y),连接OP,则OP⊥BC, 当x≠0时,k OP·k AP=-1,即 即x2+y2-4x=0. ① 当x=0时,P点坐标(0,0)是方程①的解, ∴BC中点P的轨迹方程为x2+y2-4x=0(在已知圆内的部分). 方法二:(定义法) 由方法一知OP⊥AP,取OA中点M,则M(2,0),|PM|=|OA|=2, 由圆的定义知,P的轨迹方程是(x-2)2+y2=4(在已知圆内的部分). 例3 已知直角坐标平面上的点Q(2,0)和圆C:x2+y2=1,动点M到圆C的切线长 > 设直线MN切圆于N,则动点M组成的集合是:P={M||MN|=√2|MQ|}
轨迹方程经典例题 一、轨迹为圆的例题: 1、 必修2课本P 124B 组2:长为2a 的线段的两个端点在x 轴和y 轴上移动,求线段AB 的中点M 的轨迹方程: 必修2课本P 124B 组:已知M 与两个定点(0,0),A (3,0)的距离之比为 2 1 ,求点M 的轨迹方程;(一般地:必修2课本P 144B 组2:已知点M(x ,y )与两个定点21,M M 的距离之比为一个常数m ;讨论点M(x ,y )的轨迹方程(分m =1,与m ≠1进行讨论) 2、 必修2课本P 122例5:线段AB 的端点B 的坐标是(4,3),端点A 在圆 1)1(22=++y x 上运动,求AB 的中点M 的轨迹。 (2013新课标2卷文20)在平面直角坐标系xOy 中,已知圆P 在x 轴上截得线段长为22,在y 轴上截得线段长为32。 (1)求圆心的P 的轨迹方程; (2)若P 点到直线x y =的距离为 2 2 ,求圆P 的方程。 如图所示,已知P (4,0)是圆x 2+y 2=36内的一点,A 、B 是圆上两动点,且满足∠APB =90°,求矩形APBQ 的顶点Q 的轨迹方程. 解:设AB 的中点为R ,坐标为(x ,y ),则在Rt △ABP 中,|AR |=|PR |.又因为R 是弦AB 的中点,依垂径定理:在Rt △OAR 中,|AR |2=|AO |2-|OR |2=36-(x 2+y 2)又|AR |=|PR |=22)4(y x +-所以有(x -4)2+y 2=36-(x 2+y 2),即x 2+y 2-4x -10=0因此点R 在一个圆上,而当R 在此圆上运动时,Q 点即在所求的轨迹上运动. 设Q (x ,y ),R (x 1,y 1),因为R 是PQ 的中点,所以x 1= 2 ,241+= +y y x ,代入方程x 2+y 2-4x -10=0,得24 4)2()24( 22+? -++x y x -10=0整理得:x 2+y 2=56,这就是所求的轨迹方程. 在平面直角坐标系xOy 中,点)3,0(A ,直线42:-=x y l .设圆C 的半径为1,圆心在l 上. (1)若圆心C 也在直线1-=x y 上,过点A 作圆C 的切线,求切线的方程; (2)若圆C 上存在点M ,使MO MA 2=,求圆心C 的横坐标a 的取值范围. (2013陕西卷理20)已知动圆过定点)0,4(A ,且在y 轴上截得弦MN 的长为8.
ProE圆轨迹可变扫描是无维网站长IceFai在2004年所创造的在Pro/Engineerr软件上进行曲面造型的一种方法,方法主要针对一些不规则轮廓弧形隆起的曲面。这个方法因为操作简单、适用性广并且得到的曲面质量高而为广大ProE用户所采用。到现在在ProE用户中应用非常广泛,本教程详细讲解了圆轨迹可变扫描的基本实现方法,同时也对这些年来不同的用户所反馈回来的使用上遇到的各种问题做了一次性的全面解答。 圆轨迹可变扫描通过增加一个圆作为原始轨迹结合产品的外观轮廓曲线进行可变扫描方法来创建曲面,使用这个方法所创建的曲面就类似于使用旋转特征所创建的旋转曲面,不同的是普通的旋转得到的轮廓是圆,而这个方法的轮廓则可以是自由形状。典型的通过圆轨迹可变扫描所创建的曲面如图1和图2所示 对下面的案例,要使用如图3所示的平面不规则轮廓曲线,创建一个高度为20的弧形曲面。对于这样的曲面虽然看起来比较简单,但如果采用传统的够线加截面进行边界混成的方法,得到的曲面质量不高,并且操作起来也相当繁琐。下面就来看看如何运用圆轨迹可变扫描来进行这样的曲面的创建。 第一步,首先确定弧形曲面的最高点,然后在轮廓曲线所在的平面上对应这个最高点的投影位置上草绘一个基准点PNT0。
第二步,在轮廓曲线所在的平面上,以前面所创建的基准点PNT0为圆心,草绘一个一定大小的圆(图5),这个圆的直径可以随意但不能太小否则会可能导致失败,其中的原因后面将会有讲解。 第三步,采用上一步所创建的圆作为原始轨迹,轮廓曲线作为轨迹进行可变扫描(图6)。
第四步,进入可变扫描的草绘截面环境,这一步是整个方法成功与否的关键,很多用户就是因为草绘中所选择的参考和约束方法不当导致可变扫描的失败,所以务必看清楚下面的步骤并且能够仔细思考理清楚其中的原理。 选择第一步所确定的中心基准点PNT0作为草绘参考(图7),在这一步中,很多用户不注意选择这个参考,特别是在轮廓曲线的中心刚好就是在默认的基准坐标系的时候,不少用户就直接选择了其中一个基准曲面做为参考从而导致最终的失败,其实只需要仔细考虑一下在整个可变扫描过程中你所选择的参考是否还能够一样的存在就可以了,显然选择基准平面的话当轨迹转一个方向后这个基准平面不再和草绘截面法向,自然也不会再有这个参考存在了。而如果系统在进入草绘环境后默认选择了其中一个基准平面作为参考,也建议用户删除然后自己选择基准点参考。
VSS扫描详解 BY:王庆丰 VSS也叫可变截面扫描 一、首先,我们来理解一下扫描。如下图: 1.用一个不变的截面(位置和大小都不变)沿着一条轨迹线扫描过去。此轨迹 线就是原点轨迹线,其含义就是扫描过种中不管是哪个截面,他的原点始终是在这条线上。有且只有一条,且必须第一个选。 2.如果只是确定好截面的原点,截面的位置还没有完全确定下来。扫描过程默 认截面垂直于原点轨迹。所以截面在空间的位置就完全确定了。 3.起点和终点位置可以改,不一定要是草绘线的起点和终点。只要改图中数字 (0.000)即可。如果是正数,即扫描长度大于轨迹线长度时,加长部份的轨迹线是什么样呢?加长部份是直线且长度等你改的数值,且与草绘线的起点或终点相切 终点起点 二、可变截面扫描其特点是:截面是可以变化的扫描。 截面的变化有两种 1.截面大小变了,如下图:
Sd3=40+trajpar*10 0≤Trajpar≤1 扫描过程中截面中的一条边从40变到50,起始点的时候是40,终点的时候是50 也就是说在起始点时截面是一个40*sd4的矩形。终点时截面是一个50*sd4的矩形。 (上图中sd4是固定值,当然也可以变化) 截平面默认为垂直于轨迹。(方向控制下面讲,暂时用垂直于轨迹) 2.截面的位置变了。
如上图,截面大小没变,只是矩形的下面一条边相对原点轨迹线的位置变了。位置由起始点的10变到终点的50。(截平面默认为垂直于轨迹) 说明:Trajpar与原点轨迹线对应。 Trajpar=0。说明截面处在原点轨迹线的起点 Trajpar=1。说明截面处在原点轨迹线的终点 特别的当Trajpar=0.5时。说明截面处在原点轨迹线的中点。 我们来验证一下一般情况。 当Trajpar=0.3时 sd5=10+trajpar*50=10+0.3+50=25。 新建一个点。选原点轨迹线。比率0.3
高一数学 4.1.2 与圆有关的轨迹问题课时 1 【学习目标】 1.初步理解用代数方法处理几何问题的思想,坐标法 3. 初步学习用代入法,定义法求点的轨迹方程,了解求点的轨迹方程的方法,步骤。【学习重点】求点的轨迹方程的方法,步骤。 【学习难点】求点轨迹的过程中寻找动点满足的几何关系 复习案 1、复习P92直线的点斜式方程的推导过程初步体会求点的轨迹的过程,方法 2、复习P118圆的标准方程方程的推导过程初步体会求点的轨迹的过程,方法。 学习案 动点M的坐标(x,y)满足的关系式称为点M的轨迹方程 例1、已知线段AB的端点B的坐标是(4,3),端点A在圆22 (1)4 x y ++=上运动,求线段AB的中点M的轨迹方程。(试着作图,当点A在圆上运动时,追踪中点M的轨迹) 小结 当动点M的变化是由点P的变化引起的,并且已知点P在某一曲线C上运动时,常用代入法(也称相关点法)求动点M的轨迹方程,其步骤是:(1)设动点M的坐标为(x,y);(2)用点M的坐标表示点P的坐标;(3)将所得点P的坐标代入曲线C的方程,即得点M的轨迹方程 变式训练、 1、过原点O做圆2280 x y x +-=的弦OA求弦OA的中点M的轨迹方程 例2若Rt ABC ?的斜边的两端点A、B的坐标分别为(-3,0)(7,0)求直角顶点C的轨迹方程例3、已知点A(-3,0),B(3,0),动点P满足2 PA PB =,求点P 的轨迹方程分析:找出动点满足的关系式,代入动点的坐标,可得轨迹方程,由轨迹方程确定曲线的形状. 课堂小结 总结:求曲线的轨迹方程的步骤 (1)建立适当坐标系,设出动点M的坐标(x,y) (2)列出点M满足条件的集合 (3)用坐标表示上述条件,列出方程 (4)将上述方程化简。 (5)证明化简后的以方程的解为坐标的解都是轨迹上的点。 练习 1、一动点到A(-4,0)的距离是到B(2,0)的距离的2倍,求动点的轨迹方程 2、已知两定点A(-2,0),B(1,0),若动点P满足2 PA PB =,则点P的轨迹方程 3、已知圆的方程为:2266140 x y x y +--+=,求过点() 3,5 A--的直线交圆得到的弦PQ 的中点M的轨迹方程 4、等腰三角形的顶点A的坐标是(4,2),底边一个端点B的坐标是(3,5),求另一个端点C的轨迹方程。
与圆有关的轨迹方程公司内部档案编码:[OPPTR-OPPT28-OPPTL98-OPPNN08]
求与圆有关的轨迹方程 [概念与规律] 求轨迹方程的基本方法。 (1)直接法:这是求动点轨迹最基本的方法,在建立坐标系后,直接根据等量关系式建立方程。 (2)转移法(逆代法):这方法适合于动点随已知曲线上点的变化而变化的轨迹问题,其步骤 是:设动点M(x,y),已知曲线上的点为N(x 0,y ), 求出用x,y表示x 0,y 的关系式, 将(x 0,y )代入已知曲线方程,化简后得动点的轨迹方程。 (3)几何法:这种方法是根据已知图形的几何性质求动点轨迹方程。 (4)参数法:这种方法是通过引入一个参数来沟通动点(x,y)中x,y之间的关系,后消去参数,求得轨迹方程。 (5)定义法:这是直接运用有关曲线的定义去求轨迹方程。 [讲解设计]重点和难点 例1 已知定点A(4, 0),点B是圆x2+y2=4 上的动点,点P分AB的比为2:1,求点P 的轨迹方程。 例2 自A(4,0)引圆x2+y2=4的割线ABC,求弦BC中点P的轨迹方程。 方法一:(直接法)设P(x,y),连接OP,则OP⊥BC, 当x≠0时,k OP·k AP=-1,即 即x2+y2-4x=0. ① 当x=0时,P点坐标(0,0)是方程①的解, ∴BC中点P的轨迹方程为x2+y2-4x=0(在已知圆内的部分). 方法二:(定义法) 由方法一知OP⊥AP,取OA中点M,则M(2,0),|PM|=|OA|=2, 由圆的定义知,P的轨迹方程是(x-2)2+y2=4(在已知圆内的部分). 例3 已知直角坐标平面上的点Q(2,0)和圆C:x2+y2=1,动点M到圆C的切线长与|MQ|设直线MN切圆于N,则动点M组成的集合是:P={M||MN|=√2|MQ|} ∵圆的半径|ON|=1,∴|MN|2=|MO|2-|ON|2=|MO|2-1, 设点M的坐标为(x,y),则√(x2+x2?1)=√(x?2)2+x2
实体或曲面在做变截面扫描(Var Sec Swp )时,外型变化除了受到X-vector Trajectory的3D曲线控制之外也可用下列两种方式来控制: 1. 使用relation结合trajpar参数来控制截面参数的变化。Trajpar是Pro/E的内参(轨迹参数),它是从0到1的一个变量(呈线性变化)代表扫出特征的长度百分比。在扫出的开始时,trajpar的值是0;结束时为1。使用举例:在草绘的Relation中加入关系式sd#=trajpar+n,此时尺寸sd#受到trajpar+n控制。在sweep开始时值为n,结束时值为n+1。截面的高度尺寸呈线性变化。若截面的高度尺寸受sd#=sin(trajpar*360)+n控制,则呈现sin曲线变化。 2. 使用relation结合基准图形(datum graph)及trajpar参数来控制截面参数的变化。我们可利用datum graph来控制截面的变化,也可使用datum graph来控制三维实体或曲面的造型变化。先说明datum graph曲线的使用情况,创建位置为feature>create>datum>graph 再给出graph曲线的名称。绘制时给定坐标系,曲线的x轴方向会随着sweep变化,起点代表sweep开始,终点代表sweep结束。(说明:在控制方程中根据需要选取曲线的一段或全部)曲线在某点的y值即是变量值。使用datum graph控制截面的格式如下: SD#=evalgraph(“graph_name” , x_value) 式中SD#代表欲变化的参数(SD表示草绘尺寸),graph_name为datum graph的名称,x_value 代表扫描的“行程”,evalgraph(Evaluate Graph)是Pro/E系统默认的基准控制曲线计算函数,其功能为当变量x_value变化时计算相应的y值,然后指定给SD#。X_value的值可以是实数或表达式,如果是表达式可含有trajpar参数(根据用户需求而定)。 注:datum graph必须在sweep特征之前创建,或使用reorder 将之置于sweep特征之前。名称:正弦曲线 建立环境:Pro/E软件、笛卡尔坐标系 x=50*t y=10*sin(t*360) z=0 名称:螺旋线(Helical curve) 建立环境:PRO/E;圆柱坐标(cylindrical) r=t theta=10+t*(20*360) z=t*3 蝴蝶曲线 球坐标PRO/E 方程:rho = 8 * t theta = 360 * t * 4 phi = -360 * t * 8 Rhodonea 曲线 采用笛卡尔坐标系 theta=t*360*4 x=25+(10-6)*cos(theta)+10*cos((10/6-1)*theta)