目录
第1章绪论 (2)
1.1 概述 (2)
1.2高炉上料系统的PLC自动控制研究的目的、意义 (2)
1.3 国内外PLC研究和发展的现状 (2)
1.3.1国外PLC发展及典型应用概况 (3)
1.3.2国内PLC的发展和应用 (4)
1.4 PLC控制系统的优点 (5)
1.5 设计研究内容及创新点 (5)
1.5.1主要研究内容 (5)
1.5.2主要创新点 (6)
第 2章高炉上料系统的供配电设计 (7)
2.1 相关概念 (7)
2.2 负荷计算方法 (9)
2.3 系统技术指标及控制要求 (15)
2.4 高炉上料系统装置的相关控制 (15)
第3章 PLC控制系统硬件设计 (17)
3.1 确定I/O设备 (17)
3.2 PLC的选型 (18)
3.3 I/O点的分配与接线图 (19)
3.3.1 PLC输入和输出I/O点分配如下表: (19)
3.3.2绘制I/0接线图:(见附图) (23)
第4章 PLC控制系统软件设计 (24)
4.1程序说明 (24)
4.3安全保护及其措施 (25)
第5章结论与展望 (28)
5.1 结论 (28)
5.2 展望 (28)
致谢 (28)
参考文献 (29)
第1章绪论
1.1 概述
可编程控制器(PLC)是近二十年发展起来的新一代工业控制装置,其最初是为了取代继电器控制系统而发明,多用顺序逻辑控制中,如:高炉上料、电梯控制、货物存取等;随着PLC技术的不断发展,现已能实现对模拟量的控制,应用于各种闭环过程控制中及构成DCS 。德国西门子公司是一家世界领先的PLC制造厂家,生产s 7-200.s7-300,s7-400等多种型号、不同档次的产品,A系列可编程控制器是其生产的一个不断完善的中小型可编程控制器系列,具有功能强大、处理快速的处理器,较大的存储容量和丰富的指令集,能实现多种控制任务。
1.2高炉上料系统的PLC自动控制研究的目的、意义
高炉上料是整个高炉冶炼生产的关键环节,担负着为炼铁高炉提供原料的功能,其将来自料仓的各种原料按一定的配料比送到高炉内进行冶炼。整个上料过程大部分是顺序逻辑控制,涉及到一些模拟量控制,但没有反馈,不构成闭环过程控制,故而多采用可编程控制器(PLC)进行控制。主要作用是将炼铁所需的各种原料源源不断地送到高炉内,保证高炉炼铁的正常需要,而整个高炉上料卷扬系统的核心就是料车的主提升设备。早期的传动调速控制方法多采用串极、直流或转子串电阻调速控制方式,设备简单,造价低,维护方便等特点。高炉自动上料应用非常普遍,长度是有限的,为把物料从槽下料仓搬运到炉顶上,采用料车升降机,以提高生产效率。经生产实践表明,该设计思路正确,运行可靠,能达到实际生产应用的要求。中小型高炉上料主要是卷扬料车上料,由于料车上料占地面积小,在中小高炉中得到广泛的应用,如中型高炉卷扬系统采用双电机控制,小高炉采用单电机控制。卷扬上料系统的主要过程是:各种原料经过槽下配料后放入中间料斗,料车到料坑后,料斗把料放入料车,料斗闸门关到位后,料车启动,到达炉顶。
1.3 国内外PLC研究和发展的现状
多年来,可编程控制器(以下简称PLC)从其产生到现在,实现了接线逻辑到存储逻辑的飞跃;其功能从弱到强,实现了逻辑控制到数字控制的进步;其应用领域从小到大,实现了单体设备简单控制到胜任运动控制、过程控制及集散控制等各种任务
的跨越。今天的PLC在处理模拟量、数字运算、人机接口和网络的各方面能力都已大幅提高,成为工业控制领域的主流控制设备,在各行各业发挥着越来越大的作用。
1.3.1国外PLC发展及典型应用概况
自从1969年美国数字设备公司(DEC)研制出世界上第一台PLC(PDP-14型),并在通用汽车公司自动装配线上的试用,获得成功,从而开创了工业控制新时期。1971年,日本从美国引进了这项新技术,很快研制成功日本的第一台PLC(DSC);1973年,西欧国家也研制出他们的第一台PLC。到80年代初,PLC在先进工业国家中已获得广泛应用。这个时期可编程控制器发展的特点是大规模、高速度、高性能、产品系列化。这个阶段的另一个特点是世界上生产可编程控制器的国家日益增多,产量日益上升。这标志着可编程控制器已步入成熟阶段。
目前,世界上几个工业发达国家,如美国、德国、日本、英国、法国等都有几十家企业能够生产上千种各类PLC产品,其能够实现的功能也越来越多。PLC作为一种很有特色和发展前途的新型工业控制装置,在各行各业中得到了非常广泛的应用。例如在电力工业中,用于发电机和变压器监控系统;在冶金工业中,用于轧钢机运行的控制;在机械工业中,用于数控机床的控制;在食品工业中,用于饮料灌装生产线的控制;在公共事业中,用于电梯控制,城市交通控制等。使用情况主要分为如下几类:
①开关量逻辑控制:取代传统的继电器电路,实现逻辑控制、顺序控制,既可用于单台设备的控制,也可用于多机群控及自动化流水线。如注塑机、印刷机、订书机械、组合机床、磨床、包装生产线、电镀流水线等。
②工业过程控制:在工业生产过程当中,存在一些如温度、压力、流量、液位和速度等连续变化的量(即模拟量),PLC采用相应的A/D和D/A转换模块及各种各样的控制算法程序来处理模拟量,完成闭环控制。PID调节是一般闭环控制系统中用得较多的一种调节方法。过程控制在冶金、化工、热处理、锅炉控制等场合有非常广泛的应用。
③运动控制:PLC可以用于圆周运动或直线运动的控制。一般使用专用的运动控制模块,如可驱动步进电机或伺服电机的单轴或多轴位置控制模块,广泛用于各种机械、机床、机器人、电梯等场合。
④数据处理:PLC具有数学运算(含矩阵运算、函数运算、逻辑运算)、数据传送、数据转换、排序、查表、位操作等功能,可以完成数据的采集、分析及处理。数据处理一般用于如造纸、冶金、食品工业中的一些大型控制系统。
⑤通信及联网:PLC通信含PLC间的通信及PLC与其它智能设备间的通信。随着工厂自动化网络的发展,现在的PLC都具有通信接口,通信非常方便。
为了适应大中小型企业的不同需求,进一步扩大其应用范围,PLC正朝着以下方向发展:
①低档PLC向小型,简易,廉价方向发展,使之能更加广泛地取代继电器控制,日本三菱公司的FX系列具有逻辑运算,计时,计数,加减运算等各种功能。
②中高档PLC向大型,高速,多功能方向发展,使之能取代工业控制微机的部分功能,对大规模,复杂系统进行综合自动控制。开发满足不同需要的特殊功能模块,方便用户构建的控制系统。
③工厂综合自动化,消灭自动化孤岛,方便自动化系统集成是现代工业生产的需要,增强PLC的联网通信能力。包括PLC与计算机之间,不同PLC之间,PLC与现场总线之间通信能力的增强是PLC近年来发展的一个重要方向。
④编程语言不断丰富。许多公司的PLC编程语言除了原有的梯形图语言,指令表语言,顺序功能图之外还推出多种高级语言编程,以适应更广泛的需求,编程工具也在向小型化,通用化和多功能方向发展。
1.3.2国内PLC的发展和应用
我国可编程控制器的引进、应用、研制、生产是伴随着改革开放开始的。最初是在引进设备中大量使用了可编程控制器。1977年我国研制成功了以一位微处理器MC14500为核心的可编程序控制器,并开始应用于工业领域。可那时候国外可编程控制器在机械制造、石油化工、冶金钢铁、汽车、轻工业等领域的应用都得到了长足的发展。尽管接下来PLC在我国各种企业的生产设备及产品中不断扩大了应用。但我国在这个方面与发达国家有着明显的差距。
多年来的实践证明,PLC的应用,使我国工业自动化水平有了很大的提高,经济效益显著,但是,目前我国自行研制,开发或仿制的PLC还只限于小型PLC,中档以上的国产产品还是空白。国产产品不论是数量还是功能上都不能满足国内市场需求。
目前,我国自己可以生产中小型可编程控制器的企业也有许多。如上海东屋电气有限公司、杭州机床电器厂、大连组合机床研究所、苏州电子计算机厂等,而且它们的多种产品已具备了一定的规模并在工业产品中获得了应用。如北京和利公司推出的G3型小型PLC有符合IEC61131-3的五种编程语言,编程软件具有超强的计算功能,它有极强的通信功能,有集于CPU模块的标准Modbus协议,专有协议和自由协议的通信接口。通过该接口可方便地接到Profibus等总线上去。还有深圳德维森公司开发的基于PC的软PLC TOMC系列。其特点是符合IEC61131-3国际标准的编程语言,允许梯形图,顺序功能图和功能模块图混合编程,用户可以开发基于内置PC资源的C语言和定义功能块,通过以太网,TCP/IP与上位机联网。
在90%的国内PLC市场由国外PLC产品占领的今天,国产PLC能脱颖而出,并具有和国外同类产品进行竞争的能力,相信不久的将来,国产PLC将占领市场更大份额。国产化PLC的品种和性能将再上一个新的台阶。
1.4 PLC控制系统的优点
①可靠性高,抗干扰能力强
高可靠性是电气控制设备的关键性能。PLC由于采用现代大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性。使用PLC构成控制系统,和同等规模的继电接触器系统相比,电气接线及开关接点已减少到数百甚至数千分之一,故障也就大大降低。此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息。在应用软件中,应用者还可以编入外围器件的故障自诊断程序,使系统中除PLC以外的电路及设备也获得故障自诊断保护。这样,整个系统将极高的可靠性。
②配套齐全,功能完善,适用性强
PLC发展到今天,已经形成了各种规模的系列化产品,可以用于各种规模的工业控制场合。除了逻辑处理功能以外,PLC大多具有完善的数据运算能力,可用于各种数字控制领域。多种多样的功能单元大量涌现,使PLC渗透到了位置控制、温度控制、CNC等各种工业控制中。加上PLC通信能力的增强及人机界面技术的发展,使用PLC组成各种控制系统变得非常容易。
③易学易用,深受工程技术人员欢迎
PLC是面向工矿企业的工控设备。它接口容易,编程语言易于为工程技术人员接受。梯形图语言的图形符号与表达方式和继电器电路图相当接近,为不熟悉电子电路、不懂计算机原理和汇编语言的人从事工业控制打开了方便之门。
④系统的设计,工作量小,维护方便,容易改造
PLC用存储逻辑代替接线逻辑,大大减少了控制设备外部的接线,使控制系统设计及建造的周期大为缩短,同时日常维护也变得容易起来,更重要的是使同一设备经过改变程序而改变生产过程成为可能。这特别适合多品种、小批量的生产场合。
1.5 设计研究内容及创新点
1.5.1主要研究内容
课题主要研究PLC控制的基本原理;PLC控制的工艺过程, PLC控制系统硬件和软件的设计;以及PLC的编程方法。
1.5.2主要创新点
卷扬控制系统是实现了高炉生产全过程自动控制的基础,通过采用先进的传感器技术以及稳定的PLC控制技术大大提高了这个高炉生产最重要环节的准确性和稳定性。系统自投入运行以来一直稳定运行,对高炉稳产、高产,降低成本,减轻工人劳动强度起着重要作用,取得了较好的经济效益和社会效益。
第 2章高炉上料系统的供配电设计
2.1 相关概念
电力系统中直接与用户相连并向用户分配电能的环节。配电系统由配电变电所(通常是将电网的输电电压降为配电电压)、高压配电线路(即1千伏以上电压)、配电变压器、低压配电线路(1千伏以下电压)以及相应的控制保护设备组成。配电电压通常有35~60千伏和3~10千伏等。
配电系统中常用的交流供电方式有:
(1)三相三线制。分为三角形接线(用于高压配电,三相220伏电动机机和照明)和星形接线(用于高压配电、三相380伏电动机)。
(2)三相四线制。用于380/220伏低压动力与照明混合配电。
(3)三相二线一地制。多用于农村配电。
(4)三相单线制。常用于电气铁路牵引供电。
(5)单相二线制。
主要供应居民用电。配电系统的直流供电方式有:
(1)二线制。用于城市无轨电车、地铁机车、矿山牵引机车等的供电。
(2)三线制。供应发电厂、变电所、配电所自用电和二次设备用电,电解和电镀用电。
一次配电网络是从配电变电所引出线到配电变电所(或配电所)入口之间的网络。在中国又称高压配电网络。电压通常为6~10千伏,城市多使用10千伏配电。随着城市负荷密度加大,已开始采用20千伏配电方案。由配电变电所引出的一次配电线路的主干部分称为干线。由干线分出的部分称为支线。支线上接有配电变压器。一次配电网络的接线方式有放射式与环式两种。
二次配电网络是由配电变压器次级引出线到用户入户线之间的线路、元件所组成的系统,又称低压配电网络。接线方式除放射式和环式外,城市的重要用户可用双回线接线。用电负荷密度高的市区则采用网格式接线。这种网络由多条一次配电干线供
电,通过配电变压器降压后,经低压熔断器与二次配电网相连。由于二次系统中相邻的配电变电器初级接到不同的一次配电干线,可避免因一次配电线故障而导致市中心区停电。
电力系统中,发电厂、变电所和电力用户之间的连接方式,是由它们之间的地理位置、负荷大小及用户的重要性决定的。通常把电力网络的接线方式分成3种:放射性接线、树干式接线、环网式接线。
(1)放射式:又称辐射式。每条线路只向一个用户变电所供电,中间不接任何其用户。其优点是线路设计和敷设都较简单,便于管理,故障、检修互不影响,当线路发生故障时,负荷将会停电。此种接线方式供电线路长、投资大,适于负荷性质特殊,对供电可靠性要求不高的用户。
放射式
(2)树干式:又称干线式。其特点是多个用户共用一条输电线路,可节约输电线路投资,但由于输电线路分布广,故障率高,一旦输电线路故障或检修,整条输电线路用户都将停电,故可靠性较低,仅适用于要求不高的一般用户或农村电网。
树干式
(3)环网式:又称环式。环网式又分闭路环和开路环两种,为简化保护,一般采用开路环,其特点是供电可靠性高,支行比较灵活,当输电线路故障或检修时,可通
过倒闸操作,缩小停电范围和时间,但切换操作比较麻烦。
链式
(1)计算负荷
计算负荷是指用统计计算求出的,用来选择和校验变压器容量及开关设备、连接该负荷的电力线路的负荷值。
P----负荷的有功计算负荷
c
Q----负荷的无功计算负荷
c
S---负荷的视在计算负荷
c
I----负荷的计算电流
c
(2) 负荷计算
负荷计算是指对某一线路中的实际用电负荷的运行规律进行分析,从而求出该线路的计算负荷的过程。
2.2 负荷计算方法
负荷计算通常具有两种方法,一种是需要系数法,一种是二项式系数法。两种方法各有各的适用范围。需要系数是按照车间以上的负荷情况来确定的,适用于变、配电所的负荷计算。二项式系数法考虑了用电设备中几台功率较大的设备工作时对负荷影响的附加功率,一般适用于低压配电支干线和配电箱的负荷计算。
根据本槽下系统的特点,采用需要系数法计算供电负荷。
(1) 振动筛的计算负荷
查表取需要系数和功率因数为: d k =0.5
d K =0.8 cos φ=0.8 tan φ=0.75
'
N P ∑=1.1?4=4.4Kw
c a 2P ?=
d K ?'N
P ∑=3.52 Kw ca 2Q ?=P ?tan φ=2.64 Kw
ca 2S ? (2) 电机的计算负荷
d k =0.6 cos φ=0.75 tan φ=0.88
'
N P =5.5+7.5=13Kw ∑
c a 2P ?=
d K ?'N
P ∑=7.8Kw ca 2Q ?=P ?tan φ=6.86Kw
ca 2S ==10.39Kw ?
3
2I ==15.8A (3) 卷扬机的负荷计算
d k =0.1 cos φ=0.5 tan φ=1.73
'N
P =55Kw c a 2P ?=d K ?'N
P =5.5Kw ca 2Q ?= c a 2P ??tan φ=9.52Kw
ca 2S ==10.99Kw ?
3
3I ==16.7A (4) 布料机的计算负荷
d k =0.75 cos φ=0.75 tan φ=0.88
c a 2P ?=
d K ?'N
P =3Kw
ca 2Q ?=P ?tan φ=2.64Kw
ca 2S ==4Kw ?
3
4I ==6.1A (5) 总的计算负荷
取同时系数K =0.9∑
217.8Z ca P K P Kw ∑?=?∑=
219.5Z P K Q Kw ?=?∑=
Z S ==26.4Kw
3
I ==40.1A
Z 2.3 供配电设备选型
控制电器用于控制线路的通断,即控制该线路上的用电设备是否工作。保护电器用于保护线路或设备避免发生过载、短路、漏电等事故。线路或设备过载时,因导体发热而温度升高,加速绝缘老化,缩短使用寿命;短路时电流会迅速增大,温度会增高许多倍,绝缘会迅速损坏,以至产生火灾事故和人身事故;漏电会使用电器金属外壳带电,发生人身伤亡等事故。可见,在建筑电气供配电系统中控制和保护设备是相当重要的,在供配电系统中起保护、控制、调节、转换和通断作用。一般低压控制和保护设备是合二为一的。
控制和保护设备是根据一定的技术条件制造的,使用中应根据周围环境特征、电流种类、电压大小、保护要求(过负荷、短路和失压保护)等条件进行选择。但保护线PE 上不装设控制和保护设备,中性线N 一般也不装设控制和保护设备,当中线能与相线同步通断时,可以装设控制和保护设备,若中性线与保护线共用时也不能装设控制和保护设备。
(1)根据周围环境特征选择
按照控制和保护设备外壳结构形式分类,它们有开启式、保护式、封闭式、密闭式和防爆式等数种,其具体选型根据周围环境参照表2.10选用。一般低压电器所适用的环境为海拨高度不超过2500m ,空气温度在+40~-40oC 范围内,相对湿度为<90%,无明显摇动和振动的地方;无爆炸危险,无腐蚀金属和破坏绝缘的气体和尘埃,没有
雨雪侵袭的环境。在选用低压电器时,要注意安装环境是否符合上述环境条件,若不
符合则应选用能适合特殊环境的低压电器。
(2)根据电流、电压选择
控制和保护设备按适用于一定的电流和电压范围进行设计的,称之为额定电压和
额定工作电流,在选择时必须按照实际工作的电流、电压值来选择,不应超过或低于
其额定电压与额定电流,否则会发生事故或缩短设备的使用寿命。
(3)根据保护条件选择
电力变压器低压侧一般选用带过电流保护的自动开关,并尽量带有短延时和长延
时脱扣器,且短延时脱扣器的时限一般比低压出线时限大一级。对于需要自动切换的,
还应带有低电压保护。
低压配电线路一般只作短路保护,但在有过负荷可能以及火灾和爆炸危险场所的
低压配电线路,需要有过负荷保护。
电动机除装设短路保护装置外,还应装设过负荷和失压保护装置。电动机的过负
荷保护,一般采用热继电器。
在进户线或总电源处一般设置刀开关或隔离开关,便于检修。若需要自动切换时,
还可装设自动空气开关。在所有的配电线路中都应装设有短路保护装置和过载保护装
置。在住宅的每户供电线路上应装设保护装置,最好是把照明线路与插座线路的保护
装置分开,这样当插座回路出现故障时,不会影响到照明回路;酒店的每套客房应装
设一个保护装置;在易潮湿、易触电、易燃场所及移动式用电设备供电的回路,应装
设漏电保护装置
1.开关:在选择刀开关时,要根据用途、环境来确定适当的型号,满足额定电压和额定电流的要求,并按线路短路时的电动稳定和热稳定进行校验。
刀开关安装在额定电压不超过500V的线路上,为保护刀开关能安全可靠运行,通过刀开关的计算电流不应大于刀开关的额定电流,即:
≥(2.10)
式中——刀开关的额定电流;
——线路的计算电流。
在正常情况下,刀开关可以接通和断开额定电流,对于普通的负荷来说,可以根
据负载的额定电流来选择相应的刀开关,若刀开关控制电动机时,由于电动机的启动
电流很大,所以选择刀开关的额定电流要比电动机的额定电流大一些。在选择开关时
还要选择合适的操作机构,以便操作和维护方便
HD系列开关结构简单,有手柄操作、直接操作或杠杆操作,可单极、双极、三
极,其中额定电流为100~400A的刀开关采用单刀操作。
选用开关型号及参数:HD13-400/21额定电压380V 额定电流400A
权数 2 外形尺寸 210*220*275mm 质量 4.78Kg
采用中央正面杠杆操作结构式。
2.熔断器:熔断器是最简便的而且有效的保护电器。熔断器一般是指熔体底座和熔体的组合,在选用熔断器时,熔体的熔断电流绝不能大于其底座的额定电流,而熔体的额定熔断电流应根据不同用电设备来选取。
在照明用电线路中,一般熔体的额定电流大于或等于负载的计算电流,即:
≥
若负荷是气体放电灯时,在其启动瞬间电流很大,因此,熔体额定电流应选取大一些。
≥(1.1~1.7)(2.11)
式中——刀开关的额定电流;
——线路的计算电流。
RT11系列高分辨能力熔断器,改系列可用于交流50Hz、60Hz,额定电压500V
以下,额定电流400A以下的电气配电装备中。
选用型号及参数:RT11-80M熔丝额定电流80A 质量0.43Kg。
3.交流接触器:自动控制系统中最常用、最普遍的一中电器,可以频繁接通和
分断带有负载的电路,实现远距离的自动控制。接触器的工作原理是利用电磁吸力来
使触头动作的开关,它可以用于需要频繁通断操作的场合。接触器按电流类型不同可
分为直流接触器和交流接触器。在建筑工程中常用的是交流接触器。
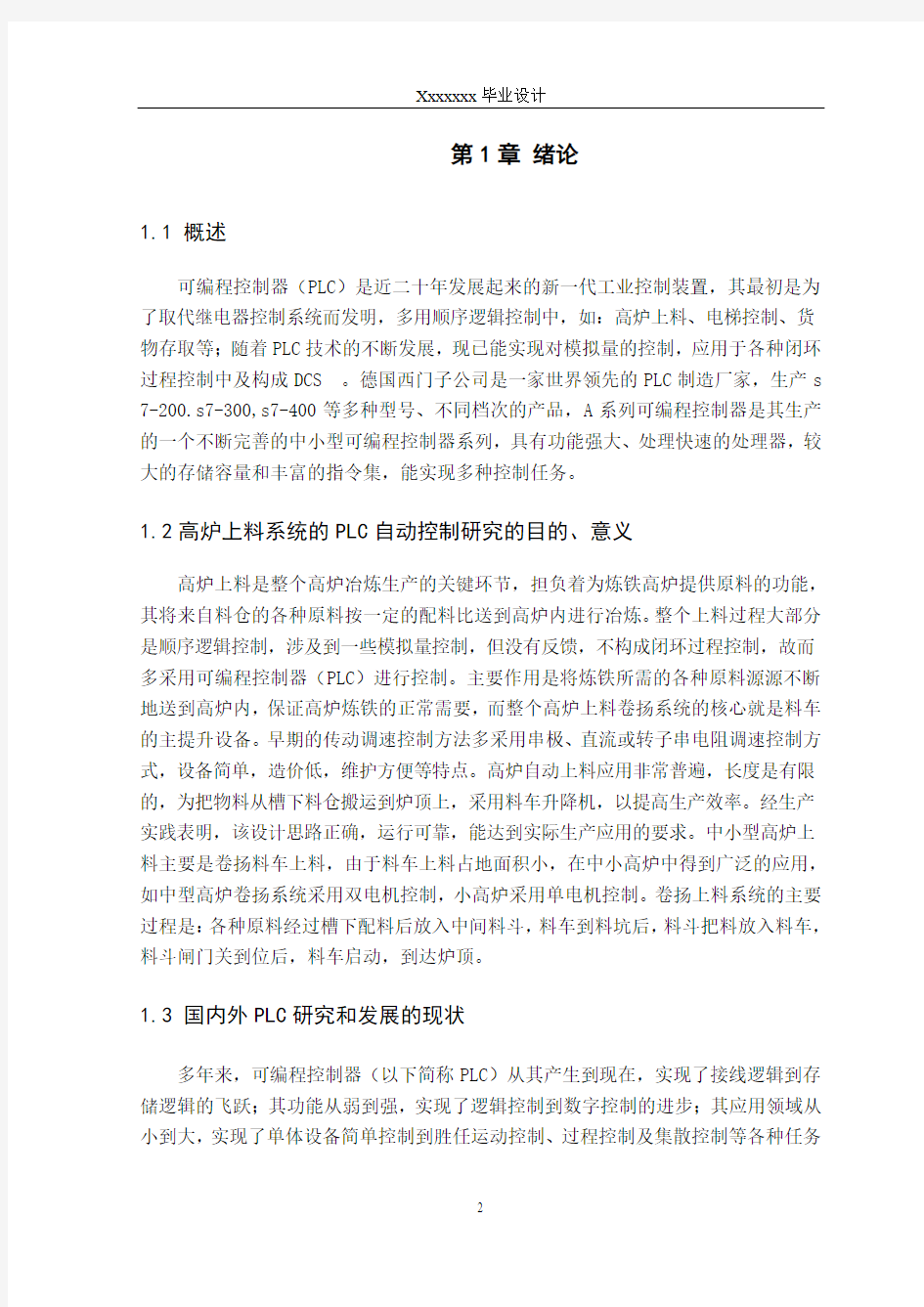
接触器的结构原理如图2-1所示。当线圈通电后,铁芯被磁化为电磁铁,产生吸
力,当吸力大于弹簧反弹力时衔铁吸合,带动拉杆移动将所有常开触头闭合、常闭触
头打开。线圈失电后,衔铁随即释放并利用弹簧的拉力将拉杆和动触头恢复至初始状
态。接触器的触头分两类,一类用于通断主电路的,称主触头,有灭弧罩,可以通过
较大电流。另一类用于控制回路中,可以通过小电流,称辅助触头。辅助触头主要有
常开和常闭两类。目前常见的交流接触器型号有CJ12、 CJ20、B、LC1-D 等系列。
图2-1 接触器的结构原理
1号2号11号12号电机选用型号:JT4-20S额定电压380V 额定电流20A 3号到10号电机选用型号:JT4-10S 额定电压380V 额定电流10A
4.热继电器:起到保护电路作用。为了使熔断器及断路器等保护装置在配电线路短路或过载时,能可靠地保护电线及电缆,必须考虑保护器动作电流与导线允许载流量的关系。
断路器:用于频繁接通和分断电路,当电路发生短路、过负载等故障时,能自动分断电路。一般可按表2-2选取。
表2-2 保护装置整定值与配电线路允许持续电流配合
热继电器选型:1号2号11号12号电机选用型号:JR20-63 额定电流63A 3号到10号电机选用型号:JR20-16 额定电流16A
断路器选用型号:DZ20Y-100 额定电压380V。
为了使故障限制在一定的范围内,各级保护装置之间必须能够配合。
熔断器与熔断器间的配合关系为:一般要求上一级熔断器的熔断电流比下一级熔断器的熔断电流大2~3倍,这样才能保证熔断器动作的选择性。
断路器与断路器间的配合关系为:上一级断路器脱扣器的整定电流一定要大于下
一级断路器脱扣器的整定电流,对于瞬时脱扣器整定电流也是同样的。
熔断器与断路器之间的配合关系为:当上一级为断路器,下一级为熔断器时,熔断器的熔断时间一定要小于断路器脱扣器动作所要求的时间。若上一级为熔断器,下一级为断路器时,断路器脱扣器动作时间一定要小于熔断器的最小熔断时间。
根据以上原则进行元件选型,供配电系统电路及元件型号见附图(供水系统中三用一备水泵供配电系统图)
6. 按钮:一种专门发号施令的电器,用以接通或断开控制回路中的电流。
选用型号:LA18-2K 额定电压380V(交流)、220V(直流) 额定电流(5)
启动黑色、停止红色触头4个(2开、2闭)。
7. 电流继电器:根据电流信号而动作.
选用型号:JT17-11Z适用于交流380V以下,直流110、220V
额定电流 300A
(7) 供配电图(见附图)
2.3 系统技术指标及控制要求
高炉上料卷扬系统的特点是主卷电动机工作频繁,负荷重,启动转矩要求高,要求有足够的提升、运载能力,上料量及上料速度要满足高炉强化生产的要求。
主卷扬系统主要由一个卷筒带南北两个料车。主卷扬55KW电机,主线路由两个CJ20-160交流接触器正反转控制。定子线圈串接电阻器由三个CJ20-160交流接触器分段控制,实现料车加减速。抱闸的推杆电机与主卷扬电机同步,接线受同一个接触器控制。电机得电,抱闸打开;电机失电,抱闸抱紧。凸轮控制器是这一电控系统的重要元件,通过链条与主卷筒相连,随着卷筒转动(起先一个转动,当转角达到相当于行程的一半时,该滚筒即停止转动,而另一半行程由另一个滚筒来完成)在其壳体内装有两个滚筒,随着接点的位置不同而发出相应的连锁信号。松绳断电开关动作,卷扬机停车。空料车从炉顶顷翻状态返回,重料车开始上升;实际上在料车提升一次所需的时间中,启动和停止时间占了近一半。卷扬机是高炉上料系统的主要设备。其实现自动控制相关设备还有:旋转布料器,电机都带抱闸制动;大小料钟,通过液压装置由电磁阀控制。
2.4 高炉上料系统装置的相关控制
大料钟和小料钟动作是由液压站通过电磁阀控制液压缸来实现的,电磁阀和电液换向阀只有通电、断电两种状态,其动作快慢通过调整油量实现,和电气无关。上料操作通常有大钟不关,小钟不开;小钟不关,大钟不开的规定。所以,在自动控制时,只有在计算机接收到其中一个钟关的信号时,程序才能输出另一个钟的开信号。
第3章 PLC控制系统硬件设计
可编程序控制器实施控制,其实质就是按一定算法进行输入输出变换,并将这个变换与以物理实现。输入输出变换、物理实现可以说是PLC实施控制的两个基本点,同时物理实现也是PLC与普通微机相区别之处,其需要考虑实际控制的需要,应能排除干扰信号适应于工业现场,输出应放大到工业控制的水平,能为实际控制系统方便使用,所以PLC采用了典型的计算机结构,主要是由微处理器(CPU)、存储器(RAM/ROM)、输入输出接口(I/O)电路、通信接口及电源组成。PLC的基本结构如图3-1所示:
图3-1 PLC基本结构图
PLC的硬件系统设计最重要的内容就是PLC的选型和I/O配置,设计出合理的PLC 外部接线图也很重要。对PLC的输入,输出进行合理的地址编号,会给PLC系统的硬件设计和软件设计带来很多方便输入输出地址编号确定后,硬件设计才可能很好完成。具体来说,PLC控制系统硬件设计可分为:确定I/O设备;PLC的选型;分配I/O 点,绘制I/O接线图。
3.1 确定I/O设备
根据系统的工艺过程和控制要求,确定系统所需要的输入设备和输出设备。该系统用到的输入设备包括,按钮,位移传感器,光电传感器,光电开关,限位开关,测速机等;输出设备有继电器,变频器,电磁阀指示灯等。传感器主要是将采集到的模
拟信号通过A/D转换设备变成数字量或开关信号输入PLC,用来实时控制系统的工作;指示灯用来指示电机,阀等的工作状态。
3.2 PLC的选型
众多的PLC产品既给用户提供了广阔的选择余地,也给用户规定了一些使用环境和要求,这样就给用户使用PLC产品带来了一定困难。PLC的选型与继电器控制系统元件的选用不同,继电器接触器系统元件的选用,必须要在设计结束之后才能定出各种元件的型号,规格和数量以及确定控制台,控制柜的大小等,而PLC选用则在应用设计的开始即可根据工艺提供的资料及控制要求等预先进行。在选择了所需功能的PLC主机,还要根据需要选择相应的模块。因此,PLC的选择包括主机型的选择,容量的选择,I/O模块的选择,电源模块的选择等几个方面。
(1)机型的选择:通过对这个系统的分析和系统控制的要求,准确地统计
出被控设备的输入输出点数为:83个开关输入,25个开关输出。因此对于这样一个系统来说采用模块式小型的PLC就可以满足它控制要求。此外还考虑到它使用和维修的方便性以及最佳的性价比。
(2)容量的选择:PLC的容量包括用户储存容量(字数)和I/O点数两方面的含义。PLC容量的选择除满足控制要求外,还应留有适当的裕量,I/O点数一般按需要的15%左右考虑,容量按实际需要的25%考虑。
(3)I/O模块的选择:I/O部分的价格占PLC价格的一半以上。应根据实际情况的需要进行合理的选择,主要考虑的是I/O信号的性质和参数,例如。输入信号电压的类型等级和变化率;信号源是电压输出型还是电流输出型,是PNP输出型还是NPN 输出型;输出信号的负载性质是交流的,还是直流的,以及它的大小,以便选择确定选用晶体管,双向晶体管还是继电器输出。
(4)电源模块的选择:电源模块的选择要需考虑输出电流,电源模块的额定输出电流必须大于CPU模块,I/O模块,专用模块等消耗电流的总和,并留有一定裕量。此外还要考虑电压模块的输入电压,输出功率以及扩展单元中的电源模块等。
本次设计采用CPU 226,本机集成24输入/16输出共40个数字量I/O点。可连接7个扩展模块,最大扩展至248路数字量I/O点或35路模拟量I/O点。。26K字节程序和数据存储空间。6个独立的30kHz高速计数器,2路独立的20kHz高速脉冲输出,具有PID控制器能力。I/O端子排可很容易的整体卸载,用于较高要求的控制系统,具有更多的I/O点,更强的模块扩展能力,更快的运行速度和功能更强的内部集成特殊功能。可完全适用于一些4复杂的中小型控制系统。
西门子公司S7200系列PLC适用于各行各业,各种场合中的检测、监测及控制的
自动化。S7-200系列的强大功能使其无论在独立运行中,或相连成网络皆能实现复杂控制功能。因此S7-200系列具有极高的性能/价格比。
S7-200系列出色表现在以下几个方面:极高的可靠性,极其丰富的指令集,易于掌握,便捷的操作,丰富的内置集成功能,实时特性,强劲的通讯能力,丰富的扩展模块。
S7-200系列在集散自动化系统中充分发挥其强大功能。使用范围可覆盖从替代继电器的简单控制到更复杂的自动化控制。应用领域极为广泛,覆盖所有与自动检测,自动化控制有关的工业及民用领域,包括各种机床、机械、电力设施、民用设施、环境保护设备等等。如:冲压机床磨床印刷机械橡胶化工机械中央空调电梯控制运动系统。
3.3 I/O点的分配与接线图
一般情况下,输入点数与控制对象的输入信号数是相对应的(留有适当裕量),输出点数与输出的控制回路数也是相对应的。故I/O点的分配,实际上把PLC的I/O 分配给实际的I/O电路,给实际的输入和输出设定一个PLC地址,列出一张I/O分配表,这个工作很重要,只有正确的分配I/O点才能绘制I/O接线图,也是后面的软件设计的基础,这为编写梯形图程序提供了很大的方便。下面分别介绍了I/O点的分配表和I/O的接线图。
该系统共使用了83输入点,25输出点, 涉及到顺序逻辑控制,还有对数据处理和故障处理,整个系统的编程量较大, 除主程序外,还包括:主卷扬、大小钟阀、布料器、故障报警等子程序块。主程序控制整个上料流程,子程序则控制相应及相关的设备或完成相关的数据处理功能。
3.3.1 PLC输入和输出I/O点分配如下表:
表1 输入信号
毕业设计论文 水温自动控制系统 钟野 院系:电子信息工程学系 专业:电气自动化技术 班级: 学号: 指导教师: 职称(或学位): 2011年5 月
目录 1 引言 (2) 2 方案设计 (2) 2.1 总体系统的设计思路 (2) 2.2 部分外围系统的设计思路 (3) 3 硬件电路设计 (3) 3.1 单片机最小系统的设计 (3) 3.2 温度检测电路的设计与论证 (4) 3.3 显示功能电路的设计与论证 (5) 3.4 温度报警提示功能电路的设计与论证 (5) 3.5 外围电路控制设计 (6) 3.6 扩展部分方案设计 (7) 4 软件设计 (7) 4.1 控制主程序设计 (7) 4.2 温度设置程序设计 (8) 4.3 上下限报警程序设计 (8) 5 结论 (9) 结束语 (9) 致谢 (10) 参考文献 (10) 附录............................................................................................................... 错误!未定义书签。
水温自动控制系统 钟野 (XXXX电子信息工程学系指导教师:CXJ) 摘要:本文设计主要是采用A T89C51单片机为控制核心、以温度传感器(DS18B20)为温度采集元件, 外加温度设置电路、温度采集电路、显示电路、报警电路和加热电路来实现对水温的显示同时自动检测及线性化处理,其误差小于±0.5℃。本文重点介绍硬件设计方案的论证和选择,以及各部分功能控制的软件的设计。本次设计的目标在于:由单片机来实现水温的自动检测及自动控制,实现设备的智能化。 关键词:单片机;温度传感器;自动控制 Abstract: This paper is designed AT89C51 microcontroller as control core and temperature sensor DS18B20) for (temperature gathering element, plus the temperature setting circuit, temperature gathering electriccircuit, display circuit, alarm circuit and heating circuit to achieve water temperature display while automatically detecting and linearization, its error is less than 0.5 + ℃. This paper mainly introduces the hardware design argumentation and choice, and some functional control software design. This design goal is: by single-chip microcomputer to realize the automatic detection and automatic temperature control, realize the intellectualized equipment. Keywords: Microcontroller; Temperature sensors; Automatic control
毕业设计(论文) 帆板控制系统 姓名:xxxxxx 系别: 年级: 专业:电子信息工程 指导老师: 帆板控制系统
【摘要】本设计采用STC89C52RC为中心控制器,利用角度传感器来的采集、处理实现对风扇转速的控制,调节风力大小,进而改变帆板转角大小;帆板的角度检测,通过ADXL345模块,实现控制帆板角度的大小;通过充分比较、论证,最终选用小型直流电机作为风扇的制动源,小型直流电机力矩大、操作简单、价格低且能满足设计需求;系统显示采用LCD12864液晶,用于实时显示帆板的角度大小;控制电机是以NPN三极管BU406为驱动,再利用PWM算法算出合理的脉冲占空比;最后经过多次测试表明,系统完全达到了设计要求,不但完成了所有基本和发挥部分的要求,并增加实现了实时显示占空比全程变化的功能。 【关键词】自动控制、帆板、角度测量、小型直流电机、液晶显示、脉宽调制 Panel Control System 【Abstrct】According to the panel control system design requirements, to design the whole system was studied, established the optimal design scheme, using STC89C52RC as the center controller, using the angle sensor to the acquisition, processing of the fan speed control. The power adjustment, and then change the windsurfer windsurfing angle; angle detection. Through the ADXL345 module realization of control panel, in terms of size; by comparison, the final selection of full proof, small DC motor as the braking source fan, small DC motor torque, simple operation, low price and can satisfy the design requirement; display system using LCD12864, used for real-time display panel angle; control motor is NPN three. BU406 drive, then the use of PWM algorithm calculates the reasonable pulse duty ratio; finally after many tests show that.The system meets the design requirements, not only finished all the basic and the requirements to play a part, and to increase the real-time display of the whole function of the variation of duty ratio. 【Keywords】A utomatic Control, Windsurfing, Angle Measurement, Small DC Motor, Liquid Crystal Display, Pulse Width Modulation
北方民族大学学士学位论文论文题目:温度自动控制系统的设计 北方民族大学教务处制
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
帆板控制系统 摘要:本设计给出了以MSP430F149为核心的帆板控制系统的基本原理与实现方案。由倾角测量模块、电机驱动模块、显示模块、调节模块等模块组成。采用SCA103T倾角传感器,可实现倾角精确测量。采用直流电机驱动风扇。系统功能由按键控制,可对测量结果进行实时显示,人机交互界面友好,经测试,达到了较好的性能指标。 关键词:MSP430F149,倾角传感器,电机驱动 The Panels Control System Abstract: The basic principle and implements solutions of the control system of the panels are given using MSP430F149 as the core. It is composed by inclination measurement modules, motor driver module, display module and adjust module. It can realize precision measurement using the SCA103T tilt sensor. Fan is driver by the dc motor, The system function is controlled by keys and the measurement result can be real-time displayed, the system has good man-machine interface and achieved better performance indicators by test,. Keywords: MSP430F149,Inclination sensor,motor driver
《运动控制系统》课程设计报告 时间2014.10 _ 学院自动化 _ 专业班级自1103 _ 姓名曹俊博__ 学号 指导教师潘月斗 ___ 成绩 _______
摘要 本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。 关键词:双闭环;直流调速;无静差;仿真 Abstract This course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation. Key Words:double closed loop;DC speed control system;without the static poor;simulation
论文题目:温度自动控制系统的设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
摘要 随着网络技术的发展,Internet已成为最具市场潜力的技术领域,使用Web技术设计的数据库应用软件,是目前Internet市场的技术中坚,各种Web应用如电子商务,网上购物等都采用这种方式实现。 网上购书在国外已经是一个比较常见的购书方式了,而在我国,网上购书才是刚刚起步,但发展的速度却十分的惊人。本系统主要实现了用户的管理、书籍的查找与购买、购物车的实现、订单的管理以及用户留言等功能,为用户提供了迅速、便利的网上购书环境。 本系统采用JSP、Servlet、JavaBean和JDBC等一些JA V A Web相关技术实现了一个简单的网上购书系统,MVC开发模式可以分离数据访问和数据表现,让开发人员可以开发一个可伸缩性强的、便于扩展的控制器,来维护整个流程。本系统通用性强,经过简单的修改就可以应用于更广泛的网上购物系统,具有一定的推广价值。 关键词:书店;数据库;JSP;Servlet;JavaBean
Abstract With the development of network technology, Internet has become the most market potential of technology, the use of Web technology, designed for database application software, is the Internet market, the technical backbone of a variety of Web applications such as e-commerce, online shopping and so using this ways. Online textbook abroad is a relatively common textbook approach, while in China, online textbook is just started, but the pace of development was very amazing. This system mainly achieves the user's management, the search and the sale of books, shopping cart implementation, order management, and user comments and other functions, provides users with fast and convenient online friendly environment. In this system, JSP, Servlet, JavaBean, and JDBC and some other JA V A Web-related technology to achieve a simple online textbook system that versatility, MVC development model can be separated from data access and data performance, so developers can develop a strong scalability, scalable controller, to maintain the entire process. Through a simple modification can be applied to a wider range of online shopping system, with a certain extension purchase. Keywords: bookstore; database;JSP;Servlet;JavaBean
辽宁工程技术大学 目录 前言 (1) 1 国内外数控发展历史 (3) 1.1国内外数控车床的研究状况与成果 (3) 1.2数控刀架的发展趋势 (6) 2 数控刀架整体方案设计 (8) 2.1数控机床刀架应满足的要求 (8) 2.2动力刀架的整体方案设计 (9) 2.3数控机床刀架的类型 (10) 2.4数控转塔刀架的开发应用 (12) 2.5刀架的工作原理 (13) 2.6刀架定位精度及重复定位精度 (15) 3 数控机床自动回转刀架机构设计 (16) 3.1步进电机的选用 (16) 3.2.1 齿轮传动的分类和特点 (17) 3.2.2 齿轮传动类型选择的原则 (18) 3.3蜗杆及蜗轮的选用与校核 (18) - 1 -
辽宁工程技术大学 3.3.1选择传动的类型 (18) 3.3.2选择材料和确定许用应力 (18) 3.3.3按接触强度确定主要参数 (19) 3.4蜗杆轴的设计 (21) 3.4.1 蜗杆轴的材料选择,确定许用应力 (21) 3.4.2 按扭转强度初步估算轴的最小直径 (21) 3.4.3 确定各轴段的直径和长度 (21) 3.4.4蜗杆轴的校核 (22) 3.4.5 键的选取与校核 (26) 3.5蜗轮轴的设计 (27) 3.5.1 蜗轮轴材料的选择,确定需用应力 (27) 3.5.2 按扭转强度,初步估计轴的最小直径 (27) 3.5.3确定各轴段的直径和长度 (27) 3.6中心轴的设计 (28) 3.6.1 刀架轴的结构设计及计算 (28) 3.6.2 确定各轴段的直径和长度 (28) 3.6.3轴的校核 (30) 3.7齿盘的设计 (30) 3.7.1齿盘的材料选择和精度等级 (31) 3.7.2 确定齿盘参数 (31) - 2 -
目录 摘要…………………………………………………………………第1章任务要求和方案设计…………………………………… 1.1 任务要求……………………………………………………… 2.1 总体方案确定及元件选择…………………………………….. 2.1.1 总体设计框图……………………………………………… 2.1.2 控制方案确定………………………………...…………… 2.1.3 系统组成……………………………………………… 2.1.4 单片机系统……………………………………….. 2.1.15 D/A转换........................................................................... 2.1.5 晶闸管控制………………………………………... 2.1.6 传感器……………………………………………… 2.1.7 信号放大电路………………………………………. 2.1.8 A/D转换……………………………………………. 2.1.9 设定温度及显示……………………………………. 第2章系统硬件设计……………………….…………………2.1 系统硬件框图……………………………………………2.2 系统组成部分之间接线分析…………………………… 第3章系统软件设计…………………………………………. 3.1程序流程图..…………………………………..…………… 第4章参数计算……………………………..………………... 4.1 系统各模块设计及参数计算 4.1.1、温度采集部分及转换部分
4.1.2、传感器输出信号放大电路部分:........................... 4.1.3、模数转换电路部分:............................ 4.1.4、ADC0804芯片外围电路的设计:....................... 4.1.5、数值处理部分及显示部分:............................. 4.1.6、PID算法的介绍....................................: 4.1.7、A/D转换模块.......................................... 4.1.7、A/D转换模块................................... 4.1.8 单片机基本系统调试............................... 4 .1. 9 注意事项:................................................................ 第5章测试方法和测试结果 5.1 系统测试仪器及设备 5.2 测试方法 5.3 测试结果 结束语........................................... 参考文献.…………………………………….……….……………
毕业设计论文 作者学号 系部 专业 题目 指导教师 评阅教师 完成时间:
毕业设计(论文)中文摘要
毕业设计(论文)外文摘要
目录 1 绪论 (1) 1.1J AVA语言的特点 (1) 1.2开发工具E CLIPSE介绍 (2) 1.3开发工具JDK介绍 (2) 1.4应用环境 (3) 2 系统需求分析 (3) 2.1需求分析 (3) 2.2可行性分析 (3) 3 系统概要设计 (4) 3.1游戏流程图 (4) 3.2设计目标 (5) 3.3系统功能模块 (5) 3.4系统数据结构设计 (7) 4 系统详细设计 (10) 4.1程序设计 (10) 4.2贪吃蛇游戏各功能界面截图 (13) 5 系统测试 (16) 5.1测试的意义 (16) 5.2测试过程 (16) 5.3测试结果 (17) 结论 (18) 致谢 (19) 参考文献 (19)
1 绪论 贪吃蛇是世界知名的益智类小游戏,选择这个题目一方面是为了将我们自己的所学知识加以运用;另一方面,我希望通过自己的所学知识把它剖析开来,通过自己的动手实践,真正的了解它的本质和精髓。希望通过这次实践,能从中提高自己的编程能力。并从中学会从零开始分析设计程序,达到学以致用,活学活用的目的。另外,通过本游戏的开发,达到学习Java技术和熟悉软件开发流程的目的。 本游戏的开发语言为Java,开发工具选用Eclipse。 Java是一种简单的,面向对象的,分布式的,解释型的,健壮安全的,结构中立的,可移植的,性能优异、多线程的动态语言。这里采用Java作为开发语言主要是基于Java的面向对象和可移植性。 Eclipse 是一个开放源代码的、基于 Java 的可扩展开发平台。就其本身而言,它只是一个框架和一组服务,用于通过插件组件构建开发环境。 1.1 Java语言的特点 1.1.1 简单性 Java与C++语言非常相近,但Java比C++简单,它抛弃了C++中的一些不是绝对必要的功能,如头文件、预处理文件、指针、结构、运算符重载、多重继承以及自动强迫同型。Java 实现了自动的垃圾收集,简化了内存管理的工作。 1.1.2 平台无关性 Java引进虚拟机原理,并运行于虚拟机,实现不同平台之间的Java接口。Java的数据类型与机器无关。 1.1.3 安全性 Java的编程类似C++,但舍弃了C++的指针对存储器地址的直接操作,程序运行时,内存由操作系统分配,这样可以避免病毒通过指针入侵系统。它提供了安全管理器,防止程序的非法访问。 1.1.4 面向对象 Java吸收了C++面向对象的概念,将数据封装于类中,实现了程序的简洁性和便于维护性,使程序代码可以只需一次编译就可反复利用。
基于 PLC 的两轴运动控制系统设计 学生姓名:张坤森 学号:2014062038 指导教师;彭宽栋 专业:机电一体化 杭州科技职业技术学院 摘要:以可编程控制器 PLC 作为运动控制系统的核心,步进电机作为运动控制系统的执行机构,设计了基于 PLC 的两轴运动控制系统;通过 PLC 高速脉冲口输出高速脉冲,实现了单轴运动或者两轴运动;采用触摸屏作为操作面板,建立了友好的人机交互界面。 关键词:机械制造自动化; PLC;步进电机;运动控制 0 前言 步进电机是一种将电脉冲转化为角位移的执行机构。步进电机开环控制结构简单,可靠性高,价格低。但当起动频率太高或者负载太大,步进电机极易失步。而步进电机闭环控制可以克服以上缺点,提高系统精度和稳定性。在闭环控制系统中,采用增量式编码器作为反馈装置。而 PLC 作为一种工业计算机,具有逻辑控制、步进控制、数据处理、存储功能、自诊断功能、通信联网等功能,而且具有较高的可靠性、较强的抗干扰性、较好的通用性等优点。所以,使用 PLC 控制步进电机,构建两轴运动控制系统,具有重要意义。 1 系统组成 本文所实现的示教与再现功能系统组成框图如图1所示。采用西门
子 S 7-200系列的 C P U226 D C/D C /D CP L C作为主控制器。该 C P U具有 4个最高 20k H z的正交高速脉冲计数器 ,能够对输入的正交编码脉冲信号进行 4分频 [ 5] ; 2个最高 20k Hz 的高速脉冲输出 ;24个输入点和 16个输出点 ; 其布尔型指令执行时间只有 0. 22μ s [ 6] 。 2 系统总体设计 该运动控制系统由触摸屏、 PLC、步进电机驱动器、步进电机、限位开关、急停开关、编码器等组成。操作者通过触摸屏端操作,向PLC 发出控制指令,PLC 根据控制指令和内部梯形图控制相应步进电机动作,步进电机将带动相应的进给轴动作,同时,PLC 将采集与步进电机相连的编码器产生的反馈信号,并将反馈信号返回给触摸屏,以完成整个系统的反馈环节。此外,外部限位开关用于限定运动系统的极限位置,急停开关用于发生突发状况时,立即停止机器,防止伤害或者损失扩大。系统总体设计框图如图 1
自动控制原理及系统仿 真课程设计 学号:1030620227 姓名:李斌 指导老师:胡开明 学院:机械与电子工程学院
2013年11月
目录 一、设计要求 (1) 二、设计报告的要求 (1) 三、题目及要求 (1) (一)自动控制仿真训练 (1) (二)控制方法训练 (19) (三)控制系统的设计 (23) 四、心得体会 (27) 五、参考文献 (28)
自动控制原理及系统仿真课程设计 一:设计要求: 1、 完成给定题目中,要求完成题目的仿真调试,给出仿真程序和图形。 2、 自觉按规定时间进入实验室,做到不迟到,不早退,因事要请假。严格遵守实验室各项规章制度,实验期间保持实验室安静,不得大声喧哗,不得围坐在一起谈与课程设计无关的空话,若违规,则酌情扣分。 3、 课程设计是考查动手能力的基本平台,要求独立设计操作,指导老师只检查运行结果,原则上不对中途故障进行排查。 4、 加大考查力度,每个时间段均进行考勤,计入考勤分数,按照运行的要求给出操作分数。每个人均要全程参与设计,若有1/3时间不到或没有任何运行结果,视为不合格。 二:设计报告的要求: 1.理论分析与设计 2.题目的仿真调试,包括源程序和仿真图形。 3.设计中的心得体会及建议。 三:题目及要求 一)自动控制仿真训练 1.已知两个传递函数分别为:s s x G s x G +=+= 22132)(,131)(
①在MATLAB中分别用传递函数、零极点、和状态空间法表示; MATLAB代码: num=[1] den=[3 1] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) num=[2] den=[3 1 0] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) 仿真结果: num =2 den =3 1 0 Transfer function: 2 --------- 3 s^2 + s
帆板控制系统 题目:帆板与控制系统组员: 指导老师: 时间:2014. 8. 11
摘要 随着社会的发展,智能化已经成为现代化产品发展的新趋势,帆板角度控制系统成为测量风力大小的产品,即可以节约电能,又可以把测量风力大小的设备向智能化产品方向过渡。 本系统采用SCT89C51单片机作为控制核心,利用角度传感器ADXL335、电机驱动L298N、液晶显示、键盘控制、声光报警等多个模块实现帆板控制系统。安置在帆板上的角度传感器将检测信号通过AD转换后传送给单片机控制系统,计算出帆板旋转角度,并由单片机控制液晶进行信息显示。帆板旋转角度可通过键盘设置风力等级,由单片机通过PWM方式驱动直流电机运转进行调速。配合角度传感器可以实时调节电机转速,进而带动风扇调整帆板转角。 测试结果证明,帆板控制系统运行稳定可靠,可以准确快速地调整帆板角度,液晶显示内容直观。
目录 第一章前言 (1) 第二章系统整体分析 (2) 2.1方案的论证 (2) 2.1.1输入模块的选择 (2) 2.2 系统的整体 (4) 第三章硬件电路 (6) 3.1 按键电路 (6) 3.2 主控电路 (6) 3.2.1振荡电路 (6) 3.2.2复位电路 (7) 3.3 风扇控制电路 (7) 3.4 显示电路 (8) 3.7 硬件系统 (9) 第四章软件系统 (10) 4.1 控制算法 (10) 4.2 角度测量原理 (10) 4.3.1 KEIL简介 (10) 4.3.2 Proteus简介 (10) 4.4 软件设计 (11) 第五章仿真与调试 (12) 5.1仿真 (12) 5.2测量 (13) 第六章总结 (18) 附录 (19)
自动控制系统课程 设计报告 课程名称:自动控制系统课程设计报告 设计题目:错位控制无环流可逆调速系统设计院系: 班级: 设计者: 学号: 同组人: 指导教师: 设计时间:
课程设计(论文)任务书 指导教师签字:系(教研室)主任签字:年月日
目录 一、错位控制无环流可逆调速系统的原理................................................................... - 4 - 1、可逆调速系统的原理.................................................................................... - 4 - 2、环流的介绍.................................................................................................... - 4 - 1、环流的定义............................................................................................. - 4 - 2、环流的分类........................................................................................... - 5 - 3、错位控制无环流系统 ................................................................................. - 5 - 1、静态环流的错位消除原理.................................................................. - 5 - 2、错位控制无环流系统的结构............................................................. - 5 - 3、错位控制无环流系统的优缺点 ........................................................ - 6 - 二、系统的设计 ................................................................................................................... - 6 - 1、主电路的设计及参数选择 ........................................................................ - 6 - 1、变压器的选择...................................................................................... - 6 - 2、晶闸管的选择...................................................................................... - 7 - 3、电抗的选择........................................................................................... - 7 - 2、同步变压器及触发器的设计.................................................................... - 7 - 1、触发电路的设计.................................................................................... - 7 - 2、同步变压器的设计............................................................................. - 8 - 3、保护电路的设计........................................................................................... - 9 - 1、过电流保护........................................................................................... - 9 - 2、过电压保护........................................................................................... - 9 - 3、缓冲电路............................................................................................... - 9 - 4、检测环节 ...................................................................................................... - 10 - 1、转速检测............................................................................................. - 10 - 2、电流检测 ............................................................................................... - 10 - 3、电压检测............................................................................................. - 10 - 5、控制电路的设计......................................................................................... - 11 - 1、AVR电压内环的设计 ..................................................................... - 11 - 2、ACR电流环的设计.......................................................................... - 12 - 3、ASR转速环的设计........................................................................... - 13 - 4、AVR、ACR和ASR的限幅设计 .................................................. - 14 - 5、AR反相器的设计............................................................................. - 14 - 三、设计小结...................................................................................................................... - 15 - 四、参考文献...................................................................................................................... - 15 -
吉林建筑大学城建学院 毕业设计开题报告 所学专业:电气信息工程及其自动化 学生姓名: 指导教师: 论文题目:基于单片机的悬挂运动控制系统设计开题报告日期:2015.3.30
说明 1、开题报告由毕业生本人在完成文献阅读、科研调查的基础上,并通过开题报 告评议后填写。 2、本报告一式两份。一份交学院作为论文检查的依据;一份答辩后作为档案材 料归入学位档案。 3、开题报告用A4纸打印,不需标注页码。报告内容字体一律使用宋体小四, 行间距为1.25倍。
一、课题来源及研究的目的和意义 课题来源:生产 研究的目的: 科技的进步以及人们生活水平的逐步提高,各种方便于生活的自动控制开始进入了人们的生活,以单片机为核心的悬挂运动自动控制系统就是其中之一。在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动系统的应用越来越多,在这些系统中悬运动部件通常是具体的执行机构,因而悬挂部件的运动精确性是整个系统工作效能的决定因素,而在实际中实现悬挂运动控制系统的精确控制是非常困难的。靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围,但受技术上的制约,使用也有一定限制。采用单片机作为系统控制器。单片机可以实现各种复杂的逻辑功能,规模大,集成度高,体积小,稳定性好,并且可利用单片机软件进行仿真和调试。单片机采用并行工作方式,提高了系统的处理速度,常用于大规模实时性要求较高的系统。 研究的意义: 运动控制是自动化技术的重要组成部分,是机器人等高技术领域的技术基础,已取得了广泛的工程应用。运动控制集成了电子技术、电机拖动、计算机控制技术等内容。自二十世纪八十年代初期,运动控制器已经开始在国外多个行业应用,尤其是在微电子行业的应用更加广泛。而当时运动控制器在我国的应用规模和行业面很小,国内也没有厂商开发出通用的运动控制器产品。在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动控制系统的应用越来越多,在这些系统中悬挂运动部件通常是具体的执行机构,因此悬挂部件的运动精确性是整个系统工作效能的决定因素。靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围。