无刷直流电机转子位置检测的新方法
作者:山东大学陈瑜黄玉王兴华
要
摘要:介绍了无刷直流电机无位置传感器转子位置检测的一种新方法。该方法利用非导通相反电势逻辑电平经逻辑处理后得到一脉冲列,采用PLL锁相技术将脉冲列倍频,通过倍频电路计数器的计数值可以精确检测转子位置。利用数字比较技术将计数值与锁存器中的预置数值比较,可以精确控制绕组电流的最佳换向时刻。通过调节锁存器中的预置值可以方便地调节换向角,非常适用于无刷直流电机的各种控制算法。同时该方法克服了外同步起动过程中易产生的振荡和失步现象。通过实验证明该方法是正确的、有效的。
关键词:无刷电机;无位置传感器;检测
1引言
无刷直流电机运行时需要采用位置传感器检测转子磁场位置信号,以控制逆变器功率管的换流,实现电机的自同步运行。传统的位置传感器是采用电子式或机电式传感器件直接测量,如霍尔效应器件(HED)、光学编码器、旋转变压器等。然而,这些传感器有以下缺点:
①分辨率低或运行特性不好,有的对环境条件很敏感,如振动、潮湿和温度变化都会使性能下降。
②增加了电气连接数目,给抗干扰设计带来一定困难。
③占用电机结构空间,限制了电机的小型化。
因此,无刷直流电机的无位置传感器化技术近年来日益受到人们的关注,国内外研究人员在这方面进行了积极的研究,提出了诸多方法,主要可分为反电势法、电感法、磁链法、旋转坐标系法、观测器法、卡尔曼滤波器法等[1~4]。反电势法简单、可靠,得到了广泛应用,其它方法由于计算复杂、对参数的鲁棒性差等原因应用较少。但反电势法的缺点是:
①低速时反电势小,难以得到有效转子位置信号,系统低速性能差。
②需用低通滤波器去掉端电压中高频噪声并移相30°以满足换流要求,对滤波器要求较高,同时滤波器容易产生移相误差,而且移相误差大小与速度有关,难以补偿[5]。
③对换相角调节困难,无法控制换相角γ(超前或滞后)的大小。
④若采用外同步脉冲起动,当驱动信号由外同步脉冲驱动向内同步脉冲驱动切换时,由于切换点的相位误差易产生振荡甚至失步[6]。
针对以上问题,本文提出了一种新型转子位置检测的方法,以三相6拍运行的无刷直
流电机为例,该方法利用非导通相反电势的过零检测信号,经逻辑处理后,得到一周期为60°电角度的脉冲列,利用PLL锁相技术对该脉冲列进行倍频,通过同步计数器计数值和锁存器预置数值的比较,可获得理想的换相点,从而精确控制换相时刻,且无时间延迟。起动时,依靠对电机在最佳切换时刻,以最佳触发方式投入自同步运行,使起动过程平稳可靠。利用数字比较技术,依靠锁存器中的不同赋值,可以灵活准确地实现换向角超前或滞后的控制,对无刷直流电机的矢量控制、弱磁控制等控制策略的实现十分方便,实验证明该方法是正确的,有效的。
2原 理
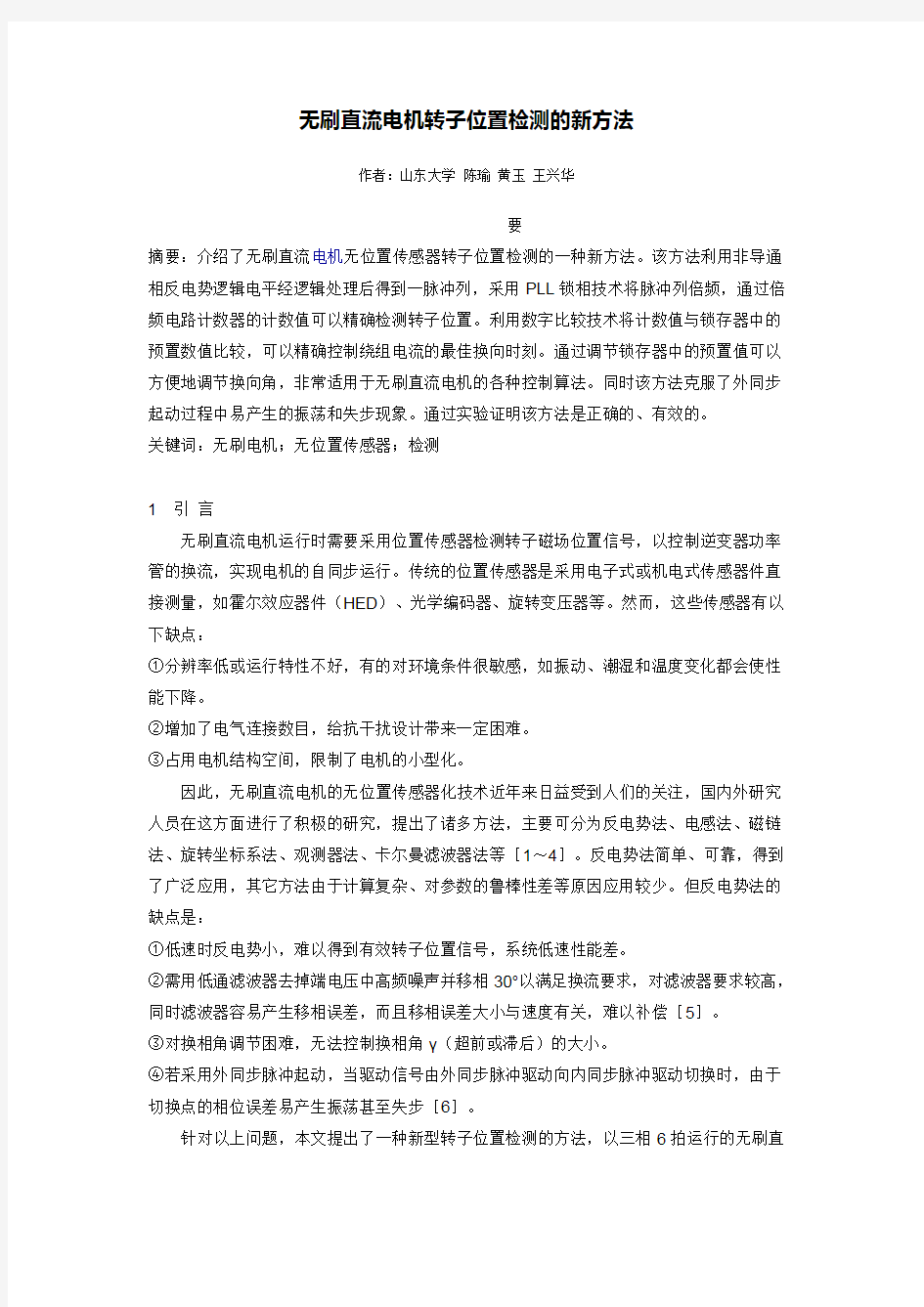
无位置传感器控制无刷直流电机的系统原理框图如图1所示,电机工作于三相6拍工作方式,采用电压外环、电流内环的双闭环控制,逆变器功率管以PWM调制方式工作,控制器以MC8031为核心。
电机运行时,检测非导通相的反电势过零点,利用过零比较器将反电势信号Ea、Eb、Ec 分别转换为逻辑电平信号Va、Vb、Vc如图2所示。采用CMOS门电路组成的脉冲倍频器如图3所示,将Va、Vb、Vc倍频后相或,得一脉冲信号H,如图2所示,此时H脉冲列周期为60°电角度,从图2中可看出t0时刻恰好a相反电势向上过零,应延时30°电角度即在t0、t1时刻的中点t4时刻开通Ta+,关断Tc+;同理在t5时刻应开通Tc-,关断Tb-;在t6时刻应开通Tb+,关断Ta+……。可见精确确定t4、t5、t6……时刻是实现准确换流的关键,本文引入了PLL技术,利用锁相环将H脉冲信号N倍频,当倍频电路中计数器计数值等于N/2时,恰为最佳换相点。利用数字比较器将计数器计数值与锁存器中的预置数值进行比较,且锁存器中可预置数值N/2,从而可以检出最佳换相时刻,然后调用换相子程序,实现换相过程,其误差为±0.5LSB合±30°/N角度,可见该方法对换相点的控制精确。
在无刷直流电机的矢量控制、弱磁控制中要求对电机换相角γ进行超前或滞后控制,且换相角是随运行工况而变化的时变量,因此对换相角的控制应快速准确。若控制算法计算出的换相角为γ0(超前为正滞后为负),则换相点对应计数器的计数值M应为:
将M值立即写入锁存器,则下一换相点便在超前γ0角度处换向。可见该方法对换相角λ的控制灵活、方便、快速,满足无刷直流电机的各种控制策略的控制要求。
电机起动时,在换相子程序中首先利用软件检测外同步驱动向内同步驱动切换的指令信号,则读出Va、Vb、Vc的状态,依此判断出逆变器功率管的触发状态,发出触发脉冲;否则中断返回。由于换向中断程序是在最佳换向时刻被触发的,所以切换点一定是最佳换向时刻,从而避免了切换过程中的振荡或失步。
同时,利用H脉冲的倍频信号SP作为位置信号,借助于恒频的时钟信号作为时钟,采用M/T法,可以方便地获得电机的转速。
3无刷直流电机位置检测的实现
从图2可知,反电势信号Ea、Eb、Ec经过零比较器后,得到反电势逻辑电平信号Va、Vb、Vc,三路逻辑电平信号Va、Vb、Vc分别经图3所示的脉冲倍频器后相或,得H脉冲列,这样一个反电势周期对应6个H脉冲。相邻H脉冲上跳沿的中点便是理想换向点。图4为无位置传感器位置检测电路,图中锁相环CD4046和2进制串行计数/分频器
CC4024构成128倍频电路,SP为倍频信号。相邻两个H脉冲上跳沿之间被128倍频,则当计数器CC4024计数值为64时便对应最佳换向时刻。由两片并行数字比较器CC14585构成的8位数字比较器时刻将计数器的计数值与锁存器的输出值进行比较,锁存器为8031系统扩展的一个外设端口,主要存储换相角γ对应的计数值,若将数值64存入锁存器,则每当计数器CC4024计数值为64时,数字比较器CC14585(1)的3引脚便发出一个脉冲,此脉冲作为换向中断请求信号向CPU请求中断,调用换向子程序,实现电机绕组电流的换向。
在无刷直流电机的矢量控制和弱磁控制过程中,CPU适时计算电机绕组的换相角γ,每完成1次换相角γ的计算,立即向锁存器中写入与之对应的计数值M,计数值M与换相角γ的关系为:
则下一换相点便在换相角γ处换向,换向误差为±0.5LSB合±0.234°电角度,完全满足精度要求。
4测速电路的实现
图5为测速电路,8253的计数器0和计数器2都工作在方式2状态。其中,计数器0对来自CD4046的倍频脉冲SP进行计数,计数器2对来自8031ALE引脚的高频时钟脉冲fc进行计数。D触发器74LS74用来使高频时钟脉冲的计数与倍频脉冲SP同步。由于8253为负沿计数,故加入反相器74LS04。8031的P1.6端给出起动和测速信号。CPU 采用M/T法适时计算出电机的转速。
5换向子程序
换向子程序的主要功能是,根据正、反转命令和反电势逻辑电平状态确定出相应的功率管开关状态。其框图如图6所示。在中断子程序中CPU首先读入a、b、c三相的反电势逻辑信号,然后判断电机的正反转状态(依据主程序中的正反转标志),根据正、反转状态和三相反电势逻辑状态信号查表确定逆变器的开关状态。正、反转状态下,反电势逻辑状态信号和开关状态之间的对应关系如表1、表2所示,它们以表格的形式存入EPROM中。
6实验结果
本文以1台750W、4极无刷直流电动机为样机,采用8031单片机控制,起动过程采用三段式起动,锁存器预置数值为64。通过实验证明采用上述无位置传感器技术,电机系统起动平稳,无振动和失步现象,调整范围为150~1 500r/min,反电势与功率管驱动信号实测相位关系如图7所示,可见上述方法是正确可行的。
7结 论
(1)利用PLL锁相环技术和并行数字比较技术可以精确控制换相角γ的大小,控制灵活、方便、快速,适用于无刷直流电机的各种控制策略。
(2)起动过程中,该方法可以精确实现外同步驱动到内同步驱动的切换,避免了起动过程中的振荡和失步现象。
(3)该方法中,可以利用倍频信号获得电机转速大小。
参考文献:
[1] J.C.Moreira.Indirect Sensing for Rotor Flux Pos-ition ofPermanent Magnet ACMotors Operating in aWide Speed Range[J].Conf.Rec.IEEE IAS Ann.Mtg.1994:401-407.
[2]S.Ogaswara.An Approach to position SensorlessDrive for Brushless DC Motors [J].IEEE Trans.Indus.Appli.1991,27(5):928-933.
[3]C.French.ControlofPermanentMagnet MotorDrivesUsing a New Position
Estimation Technique[J].IEEE Trans.Indus.Apli.,1996,32(5):1089-1097.[4]R.Dhaouadi,Design and Implementation of an ExitedKalman Filter for the State Estimation ofa PermanentMagnet Synchronous Motor[J].IEEE Trans Power Electron.,1991,6(3):494-497.
[5]沈建新.反电势法检测无刷直流电动机转子位置的误差分析[J].电工技术学报,1998,13(1):10-14.
[6]郝晓辉.无位置检测器无刷直流电机自寻最佳点切换法[J].微电机,1998,31(1):22-24.(end)
基于脉冲注入法实现的无刷直流电机转子位置检测 摘要:本文提出了一种采用脉冲注入来检测无刷直流电机在静止状态时转子位置的方法。基于方法依次向定子绕组注入一系列的脉冲,通过脉冲电流的变化对转子位置进行估算。实验结果表明:该方法不但具有较高的位置检测准确性,同时对电机的参数依赖性低,可以省去电机内部的检测元件,又可以应用到其它电机。 关键词:无刷直流电机转子位置脉冲注入识别 Abstract This paper presents a method to detect the rotor position of Permanent Magnet motors at standstill by using a suitable sequence of voltage pulses. Based on this method, a suitable sequence of voltage pulses is applied to the stator windings. We can estimate the magnets position by the current variation of the pulses. The obtained results show that this method is not only efficient but also need bit of motor parameters,it can omit motor internal examination parts and may be used on other type of motors. Key words: BLDCM Rotor position Pulses injection Recognition 引言 近年来,由于无位置传感器无刷直流电机(BLDCM)具有调速特性好、无换向火花、无无线电干扰、效率高、寿命长、运行可靠、维护简便等优点,其应用越来越广泛。检测电机转子位置是无刷直流电机研究的一个重要课题。转子位置的不确定,将直接导致电机起动失败或短暂反转。目前,无刷直流电机的起动方法有硬件起动和软件起动。但是硬件起动方式的最大缺点就是附加的起动电路加大了电机的尺寸,而且对电机的可靠性也有所降低。软件起动方式中的预定位起动,需要先把转子驱动到某一特定位置,停止摆动后再对转子驱动【1】。由于转子的惯性,会使驱动时间变长。本文提出了一种在转子静止时检测电机的方法。 永磁电机中转子的位置不同,电机的磁场分布不同,对定子中各相电流的影响也不同【2】,作者就是利用定子中电流的变化,通过向定子中发送一系列的电流脉冲,根据测量得到的电流峰值来判断转子的位置。本文简要介绍了其工作原理,对在静止状态下检测转子位置进行了实验,验证了方法的可靠性和可行性。该方法不仅适用于无刷直流电机,对永磁同步电机以及其它永磁电机也有效,并且对电机的参数没有特殊要求。 1. 基本原理 永磁电机的示意图如图1所示: 图1 基本原理 以A相为例,其内部磁场( A ?)由永磁 体PM的磁场( AM ?)和定子电流磁场( A i ?) 两个效果叠加的。 A AM Ai ??? =+(1) 如果相电流再高一些,磁路将饱和,并且绕组的自感应系数变小。如果改变电流的方向,则总磁通就变为: A AM Ai ??? =-(2) 这样,磁通将退出饱和,绕组的自感应系数将变高。正电压脉冲作用,数字控制器通过电流传感器不断对电流进行A/D 变换,当检测脉冲结束时,得到一个峰值电流【3】。然后再发出一个负电压脉冲,检测得到负的相电流峰值。比较两个被放大后的电流值可以得到一个电流差 12 A A A i i i =- △(3) 图1状态下各相的测试电流示意图如下所示,由于B,C两相的位置相对与磁铁中心轴对称,所以它们的电流差应该大小相等。由于A相此时所产生的磁场与磁铁刚好一致正反电流所受到磁场的影响也是最大的,产生的电流差理论上也是最大的。
说明书摘要 本发明公开一种永磁同步电机转子初始位置的判断方法,步骤是:首先利用脉振高频电压注入法得到初次估计的转子位置,然后在初次估计的交轴上注入一个正方向扰动信号,再估计转子位置,根据估计得到的转速方向判断磁极极性,得到电机转子初始位置。此种方法可解决脉振高频电压信号注入法检测转子初始位置时磁极极性的收敛问题,无需在直轴上注入正负方向的脉冲电流,可以有效地实现转子初始位置估算。
摘要附图
1、一种永磁同步电机转子初始位置的判断方法,其特征在于包括如下步骤: (1)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,给定?q 轴电压?0q u =; (2)检测电机的两相电流,并经过Clarke 和Park 坐标系变换,得到??d q -估计同步旋转坐标系的?q 轴电流?q i ,并依照以下步骤估计转子的位置和转速:首先,将检测得到的?q 轴电流?q i 乘以调制信号cos()t h u t ω=;然后,对相乘后所得的信号低通滤波,得到?q 轴电流?q i 的幅值信号()f θ?;最后,对该幅值信号()f θ?进行PI 调节,得到估计转速?ω ,对估计转速?ω积分得到估计的转子位置; (3)重复步骤(2),直至估计的转子位置收敛为一恒定值,即为初次估计 的转子位置?first θ; (4)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,在?q 轴注入一个正方向扰动信号,重复步骤(2),直至电机转过一定角度γ,0γ>; (5)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收 敛的磁极极性为N 极,转子初始位置??=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置??=initial first θθπ+。 2、如权利要求1所述的一种永磁同步电机转子初始位置的判断方法,其特 征在于:所述步骤(1)中,采用转子的估计位置?θ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值?u α和?u β。
直流无刷电机反电动势过零检测方法汇总 Modified by JACK on the afternoon of December 26, 2020
直流无刷电机反电动势过零检测方法 一般的永磁无刷直流电机是由三相逆变桥来驱动的,根据转子位置的不同,为了产生最大的平均转矩,在一个电角度周期中,具有6个换相状态。在任意一个时间段中,电机三相中都只有两相导通,每相的导通时间间隔为120°电角度。例如,当A相和B相已经持续60°电角度时,C相不导通。这个换相状态将持续60°电角度,而从B相不导通,到C相开始导通的过程,称为换相。换相的时刻取决于转子的位置,也可以通过判断不导通相过零点的时刻来决定。通过判断不导通相反电动势过零点,是最为常用也最为适合的无位置传感器控制方法。 反电动势过零点的检测方法是,通过测量不导通相的端电压,与电机的绕组中点电压进行比较,以得到反电动势的过零点。但对于小电枢电感的永磁无刷直流电机,在许多情况下,绕组中点电压难以获取,并且需要使用电阻分压和进行低通滤波,这样会导致反电动势信号大幅地衰减,与电机的速度不成比例,信噪比太低,另外也会给过零点带来更大的相移。 与上面的方法相比,更为常用的是虚拟中点电压法。假设A相和B相导通,则A和B两相电流大小相等,方向相反,C相电流为零,则根据永磁无刷直流电机数学模型有
根据上述方程,将不导通相的端电压与所计算的虚拟中点电压进行比较,也可以获得反电动势的过零点。这种方法十分简单,实现也比较方便。但是,由于无刷直流电机按一定频率进行PWM斩波控制,其计算出的虚拟中点电压也会随着PWM的高低电平而发生相同频率的在电源和地电平之间的变化。这样,就会带来极大的共模电平和高频噪声,会影响反电动势过零点检测的精确性。同样,和中点比较法一样,这种方法也必须要对绕组端电压进行分压和低通滤波。 这样,在一个PWM周期中,电枢绕组相电流就必然存在断续状态。速度提高时,电枢绕组中会产生峰峰值极大、频率很高的反电动势。由于以上特点,一些普遍采用的BLDC无位置传感器的控制方法均不适合。现有的无位置传感器的控制方法,如端电压检测法和转子位置估计法等,将很难得到良好的控制效果,其理由如下所述: 首先,无刷直流电机要求在电机转速提高的过程中,采用现有的端电压与中点电压比较的方法,要对三相绕组进行分压阻容滤波,计算出不导通相反电动势的过零点,再延后一定时间进行换相。但是,这样得到的反电动势过零点会因为无刷直流电机转速提高而产生过大的相移,导致当检测到反电动势过零点后,真正的换相点已经过去,从而造成换相失误。另外,现有的转子位置估
无刷直流电机的工作原 理精选文档 TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-
无刷直流电机原理 无刷直流电动机的工作原理 普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。 无刷直流电动机为了去掉电刷,将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 ●电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。无刷直流电动机的原理简图如图一所示:
主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ 调制波的对称交变矩形波。永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组建处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电度角,转子跟随定子磁场转动相当于60°电度角空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电度角,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。
日期: 2014-05-28 / 作者: admin / 分类: 技术文章 1. 简介 本文要介绍电机种类中发展快速且应用广泛的无刷直流电机(以下简称BLDC)。BLDC被广泛的用于日常生活用具、汽车工业、航空、消费电子、医学电子、工业自动化等装置和仪表。顾名思义,BLDC不使用机械结构的换向电刷而直接使用电子换向器,在使用中BLDC相比有刷电机有许多的优点,比如: 能获得更好的扭矩转速特性; 高速动态响应; 高效率; 长寿命; 低噪声; 高转速。 另外,BLDC更优的扭矩和外形尺寸比使得它更适合用于对电机自身重量和大小比较敏感的场合。 2. BLDC结构和基本工作原理 BLDC属于同步电机的一种,这就意味着它的定子产生的磁场和转子产生的磁场是同频率的,所以BLDC并不会产生普通感应电机的频差现象。BLDC中又有单相、2相和3相电机的区别,相类型的不同决定其定子线圈绕组的多少。在这里我们将集中讨论的是应用最为 广泛的3相BLDC。 定子 BLDC定子是由许多硅钢片经过叠压和轴向冲压而成,每个冲槽内都有一定的线圈组成了绕组,可以参见图。从传统意义上讲,BLDC的定子和感应电机的定子有点类似,不过在定子绕组的分布上有一定的差别。大多数的BLDC定子有3个呈星行排列的绕组,每 个绕组又由许多内部结合的钢片按照一定的方式组成,偶数个绕组分布在定子的周围组成了偶数个磁极。 BLDC的定子绕组可以分为梯形和正弦两种绕组,它们的根本区别在于由于绕组的不同连接方式使它们产生的反电动势(反电动势的相关介绍请参加EMF一节)不同,分别呈现梯形和正弦波形,故用此命名了。梯形和正弦绕组产生的反电动势的波形图如图和图
第4章 数控检测装置 4.1数控检测装置的概述 检测元件是闭环、半闭环伺服系统的重要组成部分。在闭环数控系统中,必须利用位置检测装置把机床运动部件的实际位移量随时检测出来,与给定的控制值(指令信号)进行比较,从而控制驱动元件准确运转,使工作台(或刀具)按规定的轨迹和坐标移动。因此,位置检测装置是数控机床的关键部件之一,它的精度直接影响数控机床的定位精度和加工精度。为此,对位置检测装置提出如下要求: (1)高可靠性和高抗干扰性; (2)满足精度和速度要求; (3)使用、维护方便,适合机床的运行环境; (4)成本低,寿命长。 对于不同类型的数控机床,因工作条件和检测要求不同,可以采用不同的检测方式。 ∑==n i i Z Z 1总 4.1.1对位置检测装置的要求 在数控机床中,数控装置是依靠指令值与位置检测装置的反馈值进行比较,以此来控制工作台运动的。位置检测装置是CNC 系统的重要组成部分。在闭环系统中,它的主要作用是检测位移量,并将检测的反馈信号和数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件,使其向着消除偏差的方向运动,直到偏差为零为止。为了提高数控机床的加工精度,必须提高测量元件和测量系统的精度,不同的数控机床对测量元件和测量系统的精度要求、允许的最高移动速度各不相同。现在检测元件与系统的最高水平是:被检测部件的最高移动速度至240m/min 时,其检测位移的分辨率(能检测的最小位移量)可达1μm ,相当于24m/min 时可达0.1μm 。最高分辨率可达0.01μm 。因此,研制和选用性能优越的检测装置是很重要的。 。 ‘ 数控机床对位置检测装置的要求如下: (1)受温度、湿度的影响小,工作可靠,能长期保持精度,抗干扰能力强; (2)在机床执行部件移动范围内,能满足精度和速度的要求; (3)使用维护方便,适应机床工作环境; (4)成本低; (5)易于实现高速的动态测量。 4.1.2检测装置的分类 按工作条件和测量要求的不同,测量方式亦有不同的划分方法,位置检测装置分类如表4—1所示。 表4—l 位置检测装置分类
无刷直流电机转子位置检测的新方法 作者:山东大学陈瑜黄玉王兴华 要 摘要:介绍了无刷直流电机无位置传感器转子位置检测的一种新方法。该方法利用非导通相反电势逻辑电平经逻辑处理后得到一脉冲列,采用PLL锁相技术将脉冲列倍频,通过倍频电路计数器的计数值可以精确检测转子位置。利用数字比较技术将计数值与锁存器中的预置数值比较,可以精确控制绕组电流的最佳换向时刻。通过调节锁存器中的预置值可以方便地调节换向角,非常适用于无刷直流电机的各种控制算法。同时该方法克服了外同步起动过程中易产生的振荡和失步现象。通过实验证明该方法是正确的、有效的。 关键词:无刷电机;无位置传感器;检测 1引言 无刷直流电机运行时需要采用位置传感器检测转子磁场位置信号,以控制逆变器功率管的换流,实现电机的自同步运行。传统的位置传感器是采用电子式或机电式传感器件直接测量,如霍尔效应器件(HED)、光学编码器、旋转变压器等。然而,这些传感器有以下缺点: ①分辨率低或运行特性不好,有的对环境条件很敏感,如振动、潮湿和温度变化都会使性能下降。 ②增加了电气连接数目,给抗干扰设计带来一定困难。 ③占用电机结构空间,限制了电机的小型化。 因此,无刷直流电机的无位置传感器化技术近年来日益受到人们的关注,国内外研究人员在这方面进行了积极的研究,提出了诸多方法,主要可分为反电势法、电感法、磁链法、旋转坐标系法、观测器法、卡尔曼滤波器法等[1~4]。反电势法简单、可靠,得到了广泛应用,其它方法由于计算复杂、对参数的鲁棒性差等原因应用较少。但反电势法的缺点是: ①低速时反电势小,难以得到有效转子位置信号,系统低速性能差。 ②需用低通滤波器去掉端电压中高频噪声并移相30°以满足换流要求,对滤波器要求较高,同时滤波器容易产生移相误差,而且移相误差大小与速度有关,难以补偿[5]。 ③对换相角调节困难,无法控制换相角γ(超前或滞后)的大小。 ④若采用外同步脉冲起动,当驱动信号由外同步脉冲驱动向内同步脉冲驱动切换时,由于切换点的相位误差易产生振荡甚至失步[6]。 针对以上问题,本文提出了一种新型转子位置检测的方法,以三相6拍运行的无刷直
无刷直流电机原理 无刷直流电动机的工作原理 普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。 无刷直流电动机为了去掉电刷,将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。●电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。无刷直流电动机的原理简图如图一所示: 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ 调制波的对称交变矩形波。永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组建处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组
图文讲解无刷直流电机的工作原理 导读:无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。它的应用非常广泛,在很多机电一体化设备上都有它的身影。 什么是无刷电机? 无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。由于无刷直流电动机是以自控式运行的,所以不会像变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。中小容量的无刷直流电动机的永磁体,现在多采用高磁能级的稀土钕铁硼(Nd-Fe-B)材料。因此,稀土永磁无刷电动机的体积比同容量三相异步电动机缩小了一个机座号。
无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传统的接触式换向器和电刷。它具有可靠性高、无换向火花、机械噪声低等优点,广泛应用于高档录音座、录像机、电子仪器及自动化办公设备中。 无刷直流电动机由永磁体转子、多极绕组定子、位置传感器等组成。位置传感按转子位置的变化,沿着一定次序对定子绕组的电流进行换流(即检测转子磁极相对定子绕组的位置,并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关电路,按一定的逻辑关系进行绕组电流切换)。定子绕组的工作电压由位置传感器输出控制的电子开关电路提供。 位置传感器有磁敏式、光电式和电磁式三种类型。 采用磁敏式位置传感器的无刷直流电动机,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时产生的磁场变化。 采用光电式位置传感器的无刷直流电动机,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯泡。转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号。 采用电磁式位置传感器的无刷直流电动机,是在定子组件上安装有电磁传感器部件(例如耦合变压器、接近开关、LC谐振电路等),当永磁体转子位置发生变化时,电磁效应将使电磁传感器产生高频调制信号(其幅值随转子位置而变化)。 看看这个工程师怎么说?
基于高频电压注入法的永磁同步电机转子初始位置检测 Initial Rotor Position Inspection of PMSM Based on Rotating High Frequency Voltage Signal Injection 北京航空航天大学自动化科学与电气工程学院蔡名飞周元钧 摘要:为了解决新型无位置传感器永磁同步电机的起动问题,提出了一种在电机静止状态下检测转子位置的新方法。 该方法在算法上改进了传统的旋转高频电压注入法,使得可以更为快速、准确的检测出转子初始(均扫位置。并且针对传统旋转高频电压注人法无法检测出转子永磁体极性问题,在dq旋转坐标系下,通过分析永磁同步卜匕机d轴磁链和定子电流之间的关系,利用d轴电流的泰勒级数展开,提出J’根据定子铁芯非线性磁化特性获得判另}J N/S极极性信息的新方一案。最后,建立了系统仿真模型。仿真结果验证了这种方法的有效性和可行性。此方法同样适用于永磁同步电机在中、低速时的转子位置检测。 关键词:永磁同步电机转子初始位置旋转高频注人非线性磁化特性N/S极极性 1引言 永磁同步电机高精态、高动态性能的速度、位置控制,都需要准确的转子位置信息。如果位置检测误差较大,会导致电机不能正常起动、运行。传统方法是通过机械式传感器来测量转子的速度和位置。但机械式传感器减低了系统的可靠性,增加了系统的成本;同时传感器对环境有着严格的要求,电磁干扰、温度、湿度、振动对它的测量精度都有影响。特别针对某些航空伺服电机,长期工作在恶劣、复杂的环境中,所以研究无位置传感器不仅可 以减少航空电机成本,而且可以减少不必要的引线,将大大提高整个系统的可靠性〔‘]。 最简单的无位置传感器控制方法是文献「2]提出的基于对检测到的电机反电动势进行积分,这种方法虽然简单,但是在零速或低速阶段因为反电动太小,难以检测而失败。后来人们又提出了高频注人法,其主要思想是用电机固有的空间凸极或凸极效应可以实现对转子位置的检测,这种方法与转速没有直接关系,有效克服了反电动势法的 缺陷。文献〔3]提出通过处理电流高频响应,采取求导取极值计算电机的初始位置,但这种方法存在震荡现象,高频电流也会因滤波器移相导致检测误差,并且也没有给出电 机N/S极极性检测方法。文献【4]提出在电机中注人幅值相同、方向不同的系列脉冲,检测并比较相应电流的大小来估计转子的位置。这种方法可行但是对注入脉冲的电压幅 值和时间控制要求比较高,操作复杂,检测时间过长。文献[[5][6]通过注人高频信号引起PMSM的d,q轴磁链饱和程度差异实现初始位置检测,这种方法高频电流信号提取复 杂,容易带来计算误差,难以做到转子位置的实时检测跟踪。文献〔7l所使用的电机经过特殊设计,不具普遍性,仅适用于理论研究。 为了解决以上方法的存在的问题,本文提出了一种基于旋转高频电压注人法的永磁同步电机转子初始位置检测的新方法。在电机静止状态下,通过向电机定子三相绕组中注入高频电压信号,利用电机凸极效应,通过处理高频电流响应,得出转子的位置信号。为此,本文进行了仿真研究,实现了转子d轴位置和N/S极极性的快速、准确检测。 2高频激励下的永磁同步电机的数学模型
采用增量式光电编码器作为位置检测元件的PMSM伺服电机,必须要在系统刚上电时就测得电机精确的初始位置。因为在永磁伺服驱动系统中,电机转子的位置检测与初始定位是系统构成与运行的基本条件,也是矢量控制解耦的必要条件。只有永磁同步电机的转子位置能够准确知道,才可以按照矢量控制的一系列方程,将永磁同步电机等效变换成dq坐标系上的等效模型,系统才能按照类似他励直流电机的控制方法对永磁同步电机进行控制,从而可以达到他励直流电机构成的伺服传动系统的性能指标要求。使用增量式光电编码器测量电机位置的伺服系统中, 系统上电后需要先检测出电机的初始位置。电机的初始位置不仅影响伺服系统的定位精度, 而且会对电机的快速启动性能造成一定的影响。 在系统刚刚上电,电机尚未运行时,系统开始测量转子的初始位置,此过程只需要电流环工作,根据伺服系统运行要求,在寻找初始位置的过程中,只允许有很微小的抖动,并且要求很快回归原位。 假设,采用H45-8-2500-WL型光电编码器,电机转动过程中,编码器输出的信号:A(/A)、B(/B)、Z(/Z)、U(/U)、V(/V)和W(/W),如图1(b)所示。其中A(/A)、B(/B)两组信号为相差相位角的同频率信号,分辨率为2500PPR,通过判断两组脉冲的相位可以判断出电机的旋转方向,这两组信号经4倍频之后,电机空间位置的分辨率变为10000PPR。脉冲Z (/Z)是同步信号,电机每旋转一周产生一个信号,其产生的位置固定,即电机转子转到该位置时发出信号(零位信号)。 如图1所示为伺服电机混合式光电编码器的码盘结构及输出信号波形。码盘的中间码道为刻有高密度的增量式透光缝隙(2000,2500,3000PPR等),两边分布两组互成的三个缝隙,受光元件(Photo-Diode Array)接收到发光元件(LED)通过缝隙的光线而产生互差的三相信号,经过放大整形后输出矩形波信号U(/U)、V(/V)和W(/W)。利用这些信号的组合状态来分别代表磁极在空间的不同位置。U(/U)、V(/V)和W(/W)三相脉冲信号每转的脉冲个数与电机的极对数相一致。根据U(/U)、V(/V)和W (/W)三相脉冲的高低电平关系可以判断电机磁极的当前位置。其过程是:电机启动前,通过U(/U)、V(/V)和W(/W)三相脉冲的状态估算出电机磁极位置,即当前的角度,一旦电机旋转起来,光电编码器的增量式部分可以精确地检测出位置值。这里,伺服电机极对数为4对极,则每相输出信号U(/U)、V(/V)和W(/W)的周期为空间,在每个周期中可以组合成6种状态,每种状态代表空间角度范围为。
无刷电机工作及控制原理(图解) 左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。 让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。不信可以试试。 三相线分开,电机可以轻松转动 三相线合并,电机转动阻力非常大 右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1 当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。 当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。注意这里说的是“力矩”最大,而不是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。补充一句,力矩是力与力臂的乘积。其中一个为零,乘积就为零了。 当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,
图文讲解无刷直流电机的工作原理电动无刷直流电机由电动机主体和驱动器组成导读:,是一种典型的机电一体化产品。同三相异步电动机十分相似。它的应用非常广泛,,机的定子绕组多做成三相对称星形接法在很多机电一体化设备上都有它的身影。 什么是无刷电机?无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。由于无刷所以不会像变频调速下重载启动的同步电机那样在转子上另直流电动机是以自控式运 行的,加启动绕组,也不会在负载突变时产生振荡和失步。中小容量的无刷直流电动机的永磁体,稀土永磁无刷电动机的体积比材料。因此,现在多采用高磁能级的稀土钕铁硼(Nd-Fe-B)同容量三相异步电动机缩小了一个机座 号。 . . . 无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传无换向火花、机械噪声低等优点,广泛应用于统的接触式换向器和电刷。它具有可靠性高、高档录音座、录像机、电子仪器及自动化办公设备中。无刷直流电动机由永磁体转子、多极绕组定子、位置传感
器等组成。位置传感按转子(即检测转子磁极相对定子绕组的位位置的变化,沿着一定次序对定子绕组的电流进行换流按并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关电路,置,定子绕组的工作电压由位置传感器输出控制的电子开。一定的逻辑关系进行绕组电流切换)关电路提供。位置传感器有磁敏式、光电式和电磁式三种类型。采用磁敏式位置传感器的无刷直流电动机,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时产生的磁场变化。采用光电式位置传感器的无刷直流电动机,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯泡。转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号。(例是在定子组件上安装有电磁传感器部件采用电磁式位置传感器的无刷直流电动机,谐振电路等),当永磁体转子位置发生变化时,电磁效应将如耦合变压器、接近开关、LC 使电磁传感器产生高频调制信号(其幅值随转子位置而变化)。看看这个工程师怎么 说? . . . 首先给大家复习几个基础定则:左手定则、右手定则、右手螺旋定则。别懵逼,我下面会给大家解释。简单说就是磁场中的载流导体,会受到这个是电机转动受力分析的基础,左手定则,力的作用。
无刷直流电机结构
————————————————————————————————作者:————————————————————————————————日期:
1. 磁回路分析法 图1-4 (摘自Freescale PZ104文档) 在图1-4中,当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁力线方向与外磁力线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。 “当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大”。注意这里说的是“力矩”最大,而不是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。 当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,见图1-5所示: 图1-5 (摘自Freescale PZ104文档) 如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。改变电流方向的这一动作,就叫做换相(commutation)。注意:何时换相只与转子的位置有关,而与转速无关。 以上是两相两级无刷电机的工作原理,,下面我们来看三相两极无刷电机的构造。 2. 三相二极内转子电机结构 定子三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最常用。
图1-6 (修改自Freescale PZ104文档) 图1-6显示了定子绕组的联结方式(转子未画出),三个绕组通过中心的连接点以“Y”型的方式被联结在一起。整个电机就引出三根线A, B, C。当它们之间两两通电时,有6种情况,分别是AB, AC, BC, BA, CA, CB,图1-7(a)~(f)分别描述了这6种情况下每个通电线圈产生的磁感应强度的方向(红、兰色表示)和两个线圈的合成磁感应强度方向(绿色表示)。 在图(a)中,AB相通电,中间的转子(图中未画出)会尽量往绿色箭头方向对齐,当转子到达图(a)中绿色箭头位置时,外线圈换相,改成AC相通电,这时转子会继续运动,并尽量往图(b)中的绿色箭头处对齐,当转子到达图(b)中箭头位置时,外线圈再次换相,改成BC相通电,再往后以此类推。当外线圈完成6次换相后,内转子正好旋转一周(即360°)。再次重申一下:何时换相只与转子位置有关,而与转速无关。 图1-8中画出了换相前和换相后合成磁场方向的比较与转子位置的变化。一般来说,换相时,转子应该处于,比与新的合成磁力线方向垂直的位置不到一点的钝角位置,这样可以使产生最大的转矩的垂直位置正好处于本次通电的中间时刻。 (a) AB相通电情形(b) AC相通电情形
无刷直流电机结构、类型和基本原理 2009年10月14日 无刷直流电动机 一、概述 直流电动机的主要优点是调速和启动特性好,堵转转矩大,被广泛应用于各种驱动装置和伺服系统中。但是,直流电动机都有电刷和换向器,其间形成的滑动机械接触严重地影响了电动机的精度、性能和可靠性,所产生的火花会引起无线电干扰。缩短电动机寿命,换向器电刷装置又使直流电动机结构复杂、噪声大、维护困难,长期以来人们都在寻求可以不用电刷和换向器装置的直流电动机。 随着电子技术的迅速发展,各种大功率电子器件的广泛采用,这种愿望已被逐步实现。本章要介绍的无刷直流电动机利用电子开关线路和位置传感器来代替电刷和换向器,使这种电动机既具有直流电动机的特性。又具有交流电动机结构简单、运行可靠、维护方便等优点;它的转速不再受机械换向的限制,若采用高速轴承,还可以在高达每分钟几十万转的转要中运行。 元刷直流电动机用途非常广泛,可作为一般直流电动机、伺服电动机和力矩电动机等使用,尤其适用于高级电子设备、机器人、航空航天技术、数控装置、医疗化工等高新技术领域。无刷直流电动机将电子线路与电机融为一体,把先进的电子技术应用于电机领域,这将促使电机技术更新、更快地发展。 二、无刷直流电动机的基本结构和类型 (一)基本结构 无刷直流电动机是一种自控变频的永磁同步电动机,就其基本组成结构而言.可以认为是由电动机本体、转子位置传感器和电子开关电路三部分组成的“电动机系统”。其基本结构如图5一20所示。
电动机本体在结构上是一台普通的凸极式同步电动机.它包括主定子和主转子两部分,主定子上放置空间互差120。的三相对称电枢绕组Ax、BY、cz,接成星形或三角形,主转子是用永久磁钢制成的一对磁极。转子位置传感器也由定子、转子两部分组成。定子安装在主电动机壳内,转子和主转子同轴旋转。它的作用是把主转子的位置检测出来.变成电信号去控制电子开关电路,故也称转子位置检测器。电子开关电路中的功率开关元件分别与主定子上各相绕组相连接.通过位置传感器输出的信号,控制三极管的导通和截止.从而使主定子上各相绕组中的电流也随着转子位置的改变,按一定的顺序进行切换,实现无接触式的换向。 l.电机本体 元刷直流电动机是将普通直流电动机的定予与转子进行了互换。其转子为永久磁铁,产生气隙磁通:定子为电枢,由多相绕组组成。在结构上,它与永磁同步电动机类似。 无刷直流电动机定子的结构与普通的同步电动机或感应电动机相同.在铁芯中嵌入多相绕组(三相、四相、五相不等).绕组可接成星形或三角形,并分别与逆变器的各功率管相连,以便进行合理换相。转子多采用钐钴或钕铁硼等高矫顽力、高剩磁密度的稀土料,由于磁极中磁性材料所放位置的不同.可以分为表面式磁极、嵌入式磁极和环形磁极。由于电动机本
1、引言 你希望在你的新产品中使用无刷伺服电机吗?平时,我们可能也常碰到一些关键词,例如“梯形波式”,“正弦波式”和“矢量控制”。只有当你了解了他们的真正含义,才能在你的新设计中选择正确的产品。 在过去的十年甚至二十年中,伺服电机市场已经从有刷伺服转变成无刷伺服的市场,这主要是由无刷伺服的低维修率和高稳定性所决定的。在这十几年中,驱动部分在电路和系统方面的技术已发展的非常完善。控制方式也已经完全可以实现那些关键词所描述的功能。 大部分的高性能的伺服系统都采用一个内部控制环来控制力矩。这个内部的力矩环通过和外部的速度环和位置环的配合以达到不同的控制效果。外部控制环的设计是与匹配的电机没有关系的,而内部的力矩环的设计则与所匹配的电机的性能息息相关。 有刷电机的力矩控制是非常简单的,因为有刷电机自身可完成换相工作。所输出的力矩是和有刷电机两极输入的直流电压成正比的。力矩也可通过P-I控制回路轻松地得到控制。P-I控制回路的主要功能就是通过检测电机实际电流和控制电流之间的偏差,实时地调整电机的输入电压。 图1 由于无刷电机自身没有换相功能,所以相对应的控制方式就比较复杂。无刷电机有三组线圈,有别于有刷电机的两组线圈。为了获得有效的力矩,无刷电机的三组线圈必须根据转子的实际位置进行相互独立的控制。这种驱动方式就充分地说明了对无刷电机控制的复杂性。 2、无刷电机基础 简单来说,无刷电机主要由旋转的永磁体(转子)和三组均匀分布的线圈(定子)组成,线圈包围着定子被固定在外部。电流流经线圈产生磁场,三组磁场相互叠加形成一个矢量磁场。通过分别控制三组线圈上的电流大小,我们可以使定子产生任意方向和大小的磁场。同时,通过定子和转子磁场之间的相互吸引和排斥,力矩便可自由地得到控制。
诸暨市博莱斯机电科技有限公司 诸暨市博莱斯机电科技有限公司专门生产直流无刷外转子风机 https://www.doczj.com/doc/ac8408668.html,/ 一、定义 通过输入直流电能,使直流电动机旋转以带动风机叶轮旋转,从而实现直流电能向机械能转换过程的风机称直流风机。直流风机最大的特点是选配了直流电动机。二、简介 目前直流风机多采用直流无刷电机,无刷直流电机由于省去了励磁用的集电环和电刷,在结构上大大简化。同时不但改善了电机的工艺性,而且电机运行的机械可靠性大为增强,寿命增加。 同时气隙磁密可大大提高,电机指标可实现最佳设计,其直接效果就是电机体积缩小,重量减轻。不仅如此,较其它电机而言,还具有非常优异的控制性能。这是因为:其一,由于永磁材料的高性能而使电机的力矩常数、转矩惯量比、功率密度等大大提高。通过合理设计又能使转动惯量、电气及机械时间常数等指标大大降低,作为伺服控制性能的主要指标有了很大改善。其二,现代永磁磁路的设计已较完善,加上永磁材料的矫顽力高,因而永磁电机的抗电枢反应及其抗去磁的能力大大加强,电机的控制参量随外部扰动影响大大减小。其三,由于用永磁体取代了电励磁,减少了励磁绕组及励磁磁场的设计,因而减少了励磁磁通、励磁绕组电感、励磁电流等诸多参数,从而直接减少了可控变量或参量。综合以上各因素可以说永磁电机具有优异的可控性。 目前大容量风机调节风量已有很多采用变频调速方式,这一类变频器主要依赖进口,价格昂贵。目前1kw以下功率等级的风机,特别是家用空调等的风机已有永磁无刷直流电机驱动,并采用调速调风量方式。1~10kw功率范围的风机用量巨大,基本采用感应电机驱动,并采用调节风口开度方式调节风量。对于这一功率范围内的风机,采用永磁无刷直流电机驱动替代原先的感应电机驱动具有巨大的优越性。 三、特点 1.损耗小、效率高 因为采用了永磁体励磁,消除了感应电机励磁电流产生的损耗;同时永磁无刷直流电动机工作于同步运行方式,消除了感应电机转子铁心的转频损耗。这两方面使永磁无刷直流电机的运行效率远高于感应电机,小容量电机的效率提高更明显。 2.功率因数高 由于无刷直流电机的励磁磁场不需要电网的无功电流,因此其功率因数远高于感应电机,无刷直流电机可以运行于1功率因数,这对小功率电机极为有利。无刷电机与感应电机相比不但额定负载时具有更高的效率和功率因数,而且在轻载时更具有优势。 3.调速性能好、控制简单 与感应电机的变频调速相比,无刷直流电机的调速控制不但简单,而且具有更好的调速性能。 4.逆变器容量低,因此逆变器成本低 无刷直流电动机需要矩形波电流,逆变器持续运行时的电流额定值指的就是这个矩形波的峰值。感应电机需要正弦波电流,逆变器持续运行时的电流额定值一般指的
无刷直流电机的组成及工作原理 2.1 引言 直流无刷电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一般用位置传感器来完成。工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,进行有序换流,以驱动直流电动机。下文从无刷直流电动机的三个部分对其发展进行分析。 2.2 无刷直流电机的组成 2.2.1 电动机本体 无刷直流电动机在电磁结构上和有刷直流电动机基本一样,但它的电枢绕组放在定子上,转子采用的重量、简化了结构、提高了性能,使其可*性得以提高。无刷电动机的发展与永磁材料的发展是分不开的,磁性材料的发展过程基本上经历了以下几个发展阶段:铝镍钴,铁氧体磁性材料,钕铁硼(NdFeB)。钕铁 硼有高磁能积,它的出现引起了磁性材料的一场革命。第三代钕铁硼永磁材料的应用,进一步减少了电机的用铜量,促使无刷电机向高效率、小型化、节能的方向发展。 目前,为提高电动机的功率密度,出现了横向磁场永磁电机,其定子齿槽与电枢线圈在空间位置上相互垂直,电机中的主磁通沿电机轴向流通,这种结构提高了气隙磁密,能够提供比传统电机大得多的输出转矩。该类型电机正处于研究开发阶段。 2.2.2 电子换相电路 控制电路:无刷直流电动机通过控制驱动电路中的功率开关器件,来控制电机的转速、转向、转矩以及保护电机,包括过流、过压、过热等保护。控制电路最初采用模拟电路,控制比较简单。如果将电路数字化,许多硬件工作可以直接由软件完成,可以减少硬件电路,提高其可靠性,同时可以提高控制电路抗干扰的能力,因而控制电路由模拟电路发展到数字电路。 驱动电路:驱动电路输出电功率,驱动电动机的电枢绕组,并受控于控制电路。驱动电路由大功率开关器件组成。正是由于晶闸管的出现,直流电动机才从有刷实现到无刷的飞跃。但由于晶闸管是只具备控制接通,而无自关断能力的半控性开关器件,其开关频率较低,不能满足无刷直流电动机性能的进一步提高。随着电力电子技术的飞速发展,出现了全控型的功率开关器件,其中有可关断晶体管(GTO)、电力场效应晶体管(MOSFET)、金属栅双极性晶体管IGBT 模块、集成门极换流晶闸管(IGCT)及近年新开发的电子注入增强栅晶体管(IEGT)。随着这些功率器件性能的不断提高,相应的无刷电动机的驱动电路也获得了飞速发展。目前,全控型开关器件正在逐渐取代线路复杂、体积庞大、功能指标低的普通晶闸管,驱动电路已从线性放大状态转换为脉宽调制的开关状态,相应的电路组成也由功率管分立电路转成模块化集成电路,为驱动电路实现智能化、高频化、小型化创造了条件。 2.2.3 转子位置检测电路