基于RSSI测距的室内定位技术 2012-08-14 12:19:45 摘要搭建了基于ZigBee技术的室内定位实验平台,以实验室楼道为室内场景进行了接收信号强度(RSSI)测距和定位实验研究。首先对测距实验采集到的数据使用线性回归分析拟合出当前环境的具体测距模型,并对信标和未知节点进行软件开发,实现了基于RSSI的定位算法。经过定位实验精度评估,文中算法的平均定位误差为2.3 m,满足大多室内场景要求。 关键词室内定位;无线传感器网络;RSSI测距;线性回归分析 随着现代通信、网络、全球定位系统(Global PositionSystem,GPS)、普适计算、分布式信息处理等技术的迅速发展,位置感知计算和基于位置的服务(Location Based Setvices,LBS)在实际应用中越来越重要。GPS是目前应用最广泛和成功的定位技术。由于微波易被浓密树林、建筑物、金属遮盖物等吸收,因此GPS 只适合在户外使用,在室内场合,由于信道环境复杂、微波信号衰减厉害、测量误差大,GPS并不适用。近年来基于低成本、低功耗、白组织的无线传感器网络(Wireless Sensor Network,WSN)定位技术得到了科研人员的重视和研究,具有广泛地应用前景。根据定位过程中是否实际测量节点间的距离,可将定位算法分为基于测距(Range-based)的定位和距离无关(range-free)的定位。基于测距的定位先由未知节点硬件接收外部信标节点发射的无线信号并记录下TOA(Time of Arrival)、AOA(Angle of Arrival)、TDOA(Time Difference of Arrival)、RSSI(Received Signal strength Indicator)等测距度量值,然后将测距度量值转为未知节点到信标节点的距离或方位,然后再采用相关算法如三边测量法、三角测量法、极大似然估计法等来计算未知节点的位置。由于RSSI检测设备和机制简单,硬件成本低,实现简单,可通过多次测量平均获得较准确的信号强度值,降低多径和遮蔽效应影响,因此基于RSSI测距的定位技术成为近年来室内定位研究的热点。 1 RSSI测距原理 无线信号传输中普遍采用的理论模型为渐变模型(Shadowing Model)。 式中,p(d)表示距离发射机为d时接收端接收到的信号强度,即RSSI值;p(d0)表示距离发射机为d0时接收端接收到的信号功率;d0为参考距离;n是路径损耗(Pass Loss)指数,通常是由实际测量得到,障碍物越多,n值越大,从而接收到的平均能量下降的速度会随着距离的增加而变得越来越快:X是一个以dBm为单位,平均值为0的高斯随机变量,反映了当距离一定时,接收到的能量的变化。 实际应用中一般采用简化的渐变模型 为便于表达和计算,通常取d0为1 m。于是可得 [p(d)]dBm=A-10nlg(d) (3) 把[p(d)dBm写成RSSI的形式得到 RSSI=A-10nlg(d) (4) 其中,A为无线收发节点相距1 m时接收节点接收到的无线信号强度RSSI值。式(4)就是RSSI测距的经典模型,给出了RSSI和d的函数关系,所以已知接收机接收到的RSSI值就可以算出它和发射机之间的距离。A和n都是经验值,和具体使用的硬件节点和无线信号传播的环境密切相关,因此在不同的实际环境下A 和n参数不同,其测距模型不同。
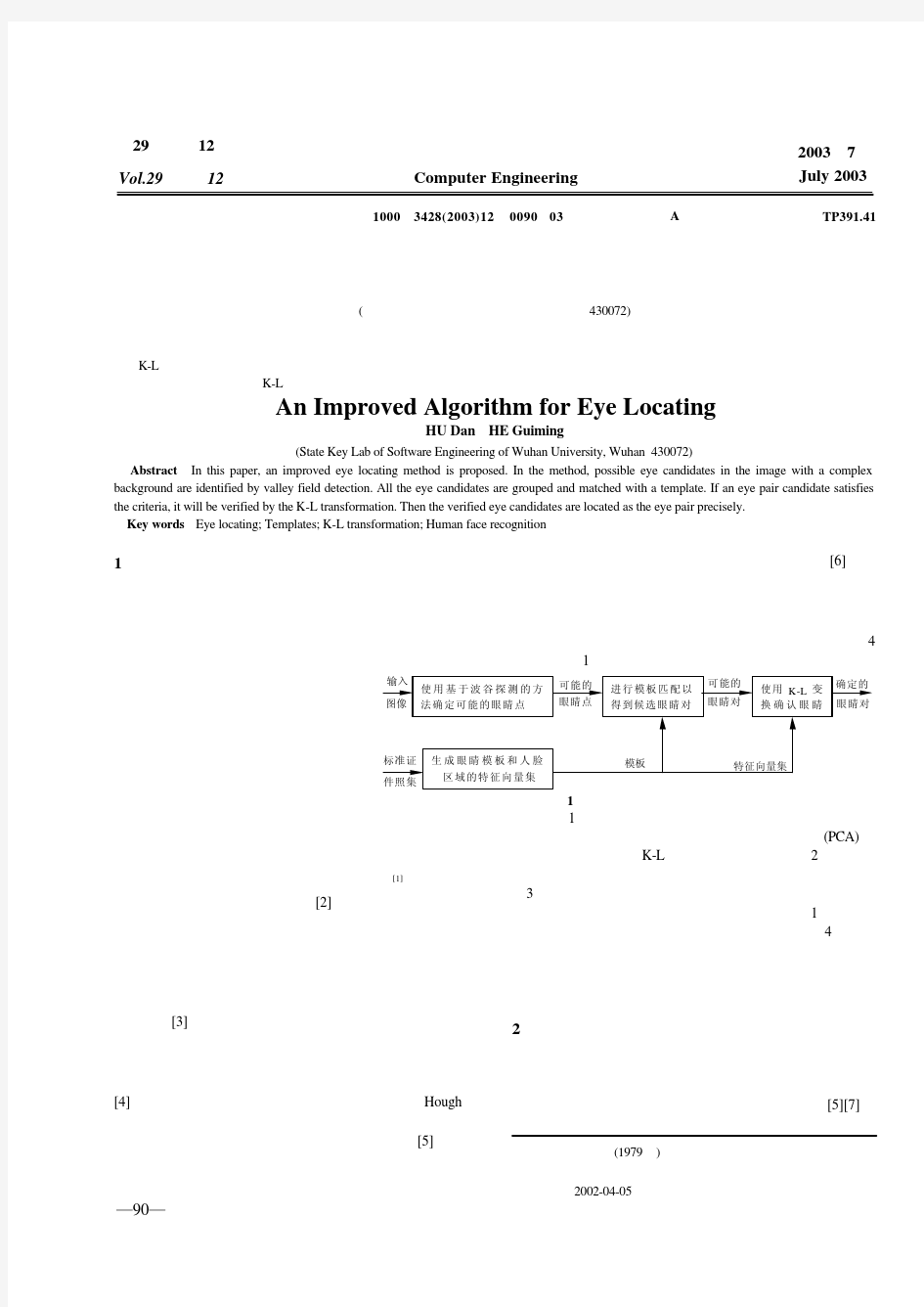
第23卷第1期2009年1月山东理工大学学报(自然科学版) Journal of Shandong University of Technology (Natural Science Edition )Vol.23No.1J an.2009 收稿日期:2008209218 基金项目:山东理工大学科技计划资助项目(2005K J M23) 作者简介:王举辉(19732),女,讲师.E 2mail :wangjuhui @https://www.doczj.com/doc/b813348557.html, 文章编号:1672-6197(2009)01-0042-04 彩色图像中人眼的精确定位 王举辉,刘晓红 (山东理工大学计算机科学与技术学院,山东淄博255049) 摘 要:提出了一个彩色图像中人眼的精确定位过程.首先利用肤色特征检测出人脸的候选区域,在检测过程中考虑了头发亮度对肤色检测的影响;然后利用改进的二值化方法进行了眼睛的检测;最后利用眼睛的位置特点和人眼模板完成了眼睛的定位.关键词:光线补偿;P GF ;二值化;模板中图分类号:TP391.41文献标识码:A Accurate location of eye in color image WAN G J u 2hui ,L IU Xiao 2hong (School of Computer Science and Technology ,Shandong University of Technology ,Zibo 255049,China ) Abstract :An accurate location process of eye in color image was proposed.Firstly ,t he facial de 2tection of candidate region was relized using skin color for t he given image ,taking t he influence of hair bright ness into considertion ;Secondly ,t he eye ’s detection was accomplished using improved binarized met hod ;Finlly t he eye ’s location was determined using t he eye ’s place in facial image and eye template. K ey w ords :light compensation ;peer group filtering ;binarize ;template 在日常生活中,人的脸部特征给我们提供了大量丰富的信息.由于数字设备的广泛应用(如数码相机),获得人脸图像变得非常容易,因此人脸的研究在很多领域都备受关注(如身份验证、可视化通讯等). 在人脸图像中,人眼的自动定位是人脸识别研究中的一个基本且非常重要的课题.这是因为与鼻子、嘴巴等人脸部件相比较,眼睛区域包含了更为丰富的可用于个体区分的重要信息;同时,眼睛的定位又是人脸图像进行位置、大小和角度归一化的前提,往往也是人脸其他部件检测和抽取的基础.因此,实现眼睛的精确定位是提高人脸自动识别系统性能的一个非常重要的步骤. 本文所述实现人眼的精确定位包括三部分:首先对候选人脸区域进行检测,在此过程中实现了光线补偿,并考虑了头发颜色对于人脸检测的影响;然 后对眼睛进行初步检测,采用了改进的二值化方法对眼睛区域进行分割,既能去掉背景的影响,又能去掉眼镜、衣物等的影响;最后利用人眼的位置特点对眼睛进一步去除干扰,并利用眼睛模板完成了眼睛的精确定位. 1 候选人脸区域的检测 1.1 光线补偿处理 由于肤色等色彩信息经常受到光源颜色、图像采集设备的色彩偏差等因素的影响,从而在整体上偏离本质色彩向某一方向移动,即通常所说的色彩偏冷、偏暖,照片偏黄、偏蓝等.本文采用一种“参考 白”[1]技术来抵消整个图像中存在的色彩偏差问题.这一做法的合理性可从两个角度进行考察:一方面,绝大部分的图像中都包含有纯白色,特别是包含有
TDOA定位的Chan算法MATLAB源代码Chan算法是解决TDOA定位的经典算法,被众多的论文所引用。 function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q) %% TDOA定位定位Chan算法 % GreenSim团队——专业级算法设计&代写程序 % 欢迎访问GreenSim团队主页→https://www.doczj.com/doc/b813348557.html,/greensim %********************************************************* % CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算 % 输入参数: % R(N-1×1): TDOA测量值 % Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行% 输出参数: % POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决% POS1(2X1) :定位结果1 % POS2(2X1) :定位结果2 % POS3(2X1) :定位结果3 % POS4(2X1) :定位结果4 %这段程序用于自己产生算法输入参数,用于算法测试 % delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵 % M=4; %参考基站外的基站数量 % Xb = 20;Yb = 100; %参考的基站坐标 % X = zeros(M,2); % a = 2*pi/M; % for i=1:M %生成其他基站的坐标 % X(i,1) = 400*cos(a*(i-1)); % X(i,2) = 400*sin(a*(i-1)); % end % Xreal = -150;Yreal = 200;%移动台真实坐标 % %产生TDOA测量结果 % Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实距离 % N = normrnd(0,delta,1,M);%产生TDOA测量误差 % Kb = Xb^2+Yb^2; % R = zeros(M,1); % for i=1:M %产生TDOA测量值 % R(i) = -Rb+sqrt((Xreal - X(i,1))^2+(Yreal - X(i,2))^2)+N(i); % end % Q = (0.5*eye(M)+0.5*ones(M))*(delta^2); % Pbs = [Xb Yb;X]; % N = 5; % [POS_ref POS1 POS2 POS3 POS4] = TDOA_chan(R,Pbs,Q) N = size(Pbs,1);
Fast and Accurate Pupil Positioning Algorithm using Circular Hough Transform and Gray Projection Author: Soltany, M.; Zadeh, S. T.; Pourreza. H. R. Publisher: International Conference on Computer Communication and Management. Publication Year :2011, Pagers:556-561. 一、背景知识 人眼在日常互动,交流以及其他的日常活动中起着非常重要的作用。瞳孔定位可以用于生物鉴定、凝视估计、人机交互、角色动画等应用中。将人眼定位用于人机交互系统中,可以帮助残疾人改善他们的日常生活。眼动追踪现在被用在安全监测系统中,例如通过跟踪人眼,分析人眼的状态来判断驾驶人员是否疲劳驾驶,进而做出相应的操作来保护驾驶人员的安全。 现在人眼定位主要被分为两类,一类是基于head mounted eye location 的方法,另一类是基于remote (non-contact) eye location 方法。其中基于head mounted eye location 方法是操作者需要佩戴特殊的装置,例如现在比较流行的是利用生物医学装置来获取眼睛的电信号即眼电图来定位人眼;而基于remote (non-contact) eye location 方法的是利用相关图像的知识来定位人眼,其大致可以分为3类,基于模板,特征,外观的。基于模板的方法是根据人眼的几何关系来建立相应的人眼模板,然后利用这个模板来检测定位人眼;基于特征的方法是利用某种方法来提取人眼的特征,进而定位人眼,比如利用投影函数来定位人眼。 二、相关工作 2009 Lu 等人利用基于灰度投影的方法来定位人眼[1],虽然这种方法有较低的计算复杂度,但是由于对噪声,眉毛、头部姿态等因素不鲁棒,所以其定位的精度不是很高。2011 Timm 等人利用基于图像梯度的方法来检测定位人眼[2]。这种方法定义一个目标函数,然后获得很多相应的梯度向量,选取使目标函数最大的那个梯度向量,那么这个向量对应的位置就认为是人眼的位置。2008年Bacivarov等人利用基于外观的方法来定位人眼[3],这种方法有着较高的定位精度,但是这种方法需要大量的训练时间,即当遇到新情况需要更新相关数据时,比如更新某种外观系数,就需要花费相应大量的时间。在人眼定位系统中,检测简单的外形比如圆形是一种很直观并且很好的方法[4]。但是利用边缘检测算子来进行圆检测的方法很容易丢失希望曲线上的点,即很容出现检测出的圆是断层的,那么Hough变换被提出,并用来解决上面的问题。 三、算法原理
室内定位常用算法概述 一.室内定位目的和意义 随着数据业务和多媒体业务的快速增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端或其持有者、设施与物品在室内的位置信息。但是受定位时间、定位精度以及复杂室内环境等条件的限制,比较完善的定位技术目前还无法很好地利用。因此,专家学者提出了许多室内定位技术解决方案,如A-GPS定位技术、超声波定位技术、蓝牙技术、红外线技术、射频识别技术、超宽带技术、无线局域网络、光跟踪定位技术,以及图像分析、信标定位、计算机视觉定位技术等等。这些室内定位技术从总体上可归纳为几类,即GNSS 技术(如伪卫星等),无线定位技术(无线通信信号、射频无线标签、超声波、光跟踪、无线传感器定位技术等),其它定位技术(计算机视觉、航位推算等),以及GNSS和无线定位组合的定位技术(A-GPS或A-GNSS)。 由于在室内环境下对于不同的建筑物而言,室内布置,材料结构,建筑物尺度的不同导致了信号的路径损耗很大,与此同时,建筑物的内在结构会引起信号的反射,绕射,折射和散射,形成多径现象,使得接收信号的幅度,相位和到达时间发生变化,造成信号的损失,定位的难度大。虽然室内定位是定位技术的一种,和室外的无线定位技术相比有一定的共性,但是室内环境的复杂性和对定位精度和安全性的特殊要求,使得室内无线定位技术有着不同于普通定位系统的鲜明特点,而且这些特点是户外定位技术所不具备的。因此,两者区域的标识和划分标准是不同的。基于室内定位的诸多特点,室内定位技术和定位算法已成为各国科技工作者研究的热点。如何提高定位精度仍将是今后研究的重点。 二. 室内定位技术的国内外发展趋势 室内GPS定位技术 GPS是目前应用最为广泛的定位技术。当GPS接收机在室内工作时,由于信号受建筑物的影响而大大衰减,定位精度也很低,要想达到室外一样直接从卫星广播中提取导航数据和时
无线传感网络定位技术综述 潘国民 120802016 摘要:首先介绍无线传感网络定位技术额相关术语、评价标准等基本概念及定位算法的分类算法;重点基于测距和非测距两个方面介绍无线传感网络定位方法,并研究若干新型无线传感网络定位方法,主要包括移动锚节点算法、三维定位算法和智能定位算法。从实用性、应用环境、硬件条件、供能安全隐私等方面 出发总结当前无线传感网络定位技术存在的问题并给出可行的 解决方案后,展望未来的研究应用发展趋势。 1、引言 在很多无线传感器网络应用中,没有节点位置信息的监测信息往往毫无意义。当监测到事件发生时,关心的一个重要问题就是该事件发生的位置,如森林火灾监测,天然气管道泄漏监测等。这些事件的发生,首先需要知道的就是自身的地理位置信息。定位信息除了用来报告事件发生的地点外,还可用于目标跟踪、目标轨迹预测、协助路由以及网络拓扑管理等。 常见的定位技术如全球定位系统(globe position system,GPS)是目前应用最广的、最成熟的定位系统,通过卫星的授时和测距来对用户节点进行定位,具有较高的定位精度,实时性较好,抗干扰能量强。但是,使用GPS技术定位只适合于视距通信的场合,即室外无遮挡的环境,用户节点通常能耗高、体积大且成本也较高,还需要固定基础设施等,这不太适合低成本自组织
无线传感器网络。另外,机器人领域采用的定位技术也与无线传感器网络的定位技术不同,尽管二者非常相似,节点都具有自组织和移动特性,但是机器人节点数量少,节点能量充足且携带精确的测距设各,这在一般的能量受限的无线传感器网络中很难满足类似的条件。由于资源和能量受限的无线传感器网络对定位的算法和定位技术都提出了较高的要求。因此,无线传感器网络的定位技术或定位算法通常需要具各以下重要特征:自组织特性,节点可能随机分布或人工部署;能量高效特性,尽量采用低复杂度的定位算法,减少通信开销,延迟网络寿命;分布式计算特性,各个节点都计算自己的位置信息;鲁棒性,可能监测数据有误差,要求定位算法具有良好的容错性;节点位置计算的常用方法。2、定位技术分类: 2.1.GPS定位技术 当GPS接收机在室内工作时,由于信号受建筑物的影响而大大衰减到十分微弱的地步,要想达到室外一样直接从卫星广播中提取导航数据和时间信息是不可能的,为了得到较高的信号灵敏度,就需要延长在每个码延迟上的停留时间,A-GPS技术为这个问题的解决提供了可能性。室内GPS技术采用大量的相关器并行地搜索可能的延迟码,同时,也有助于实现快速定位。这种室内GPS 定位技术由于需要在手机内集成GPS接收器,决定了它的应用受限性,为此,把具有该功能的手机价格降到人们可以承受的范围内成了室内GPS技术追求的目标之一。
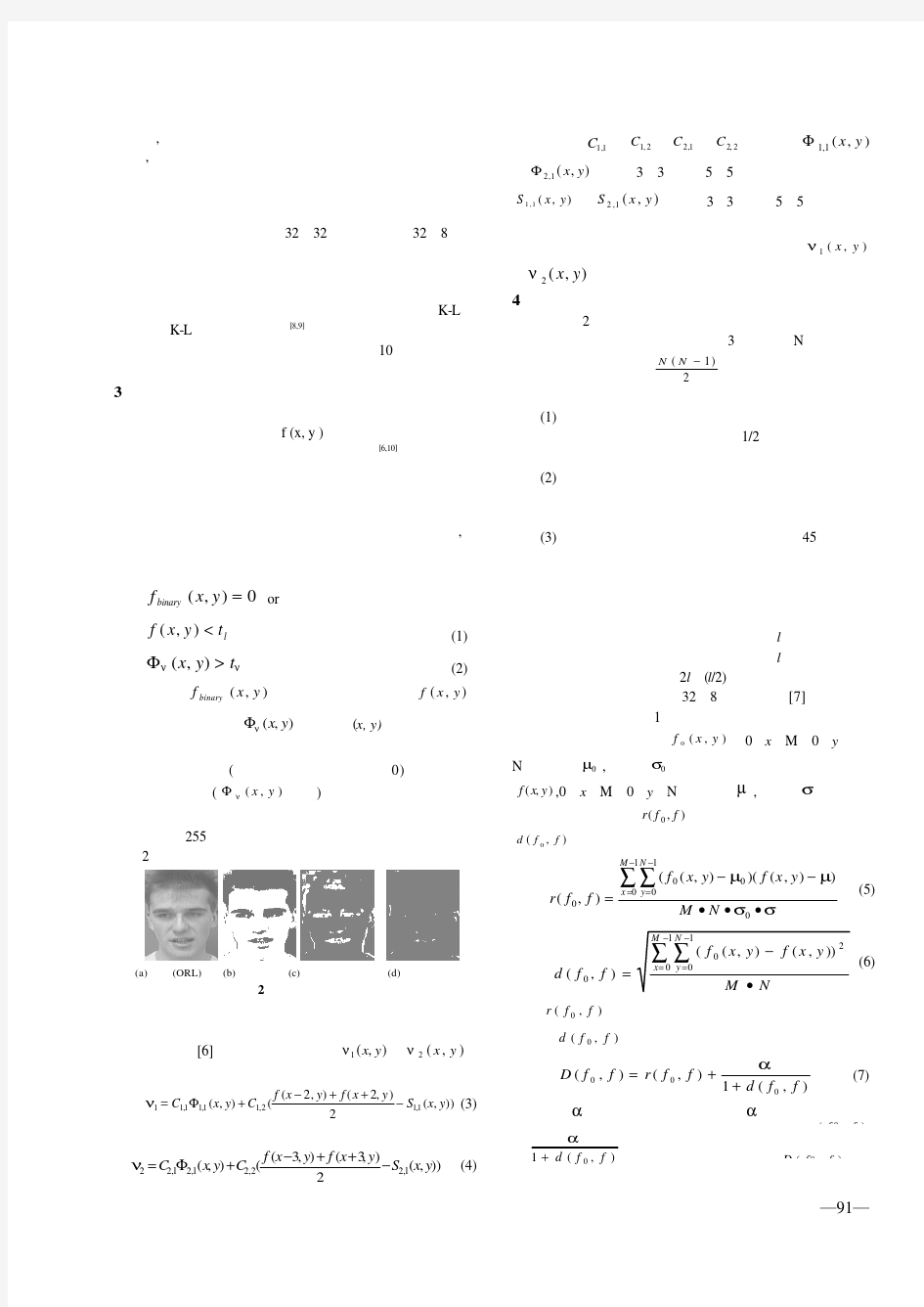
第37卷?第4期?2015-04(上)? 【71】 无线传感网大空间定位测量算法及精度评估 Positioning measurement algorithm and accuracy evaluation for wireless sensor networks in large field working space 刘文文,王俊岭,杨 瑛 LIU Wen-wen, WANG Jun-ling, YANG Ying (合肥工业大学,合肥 230009) 摘 要:无线传感网结构参数对移动节点定位精度有重要影响。面对基于无线传感网大空间定位测量过程 中的共性问题:测量距离约束和信号覆盖范围约束,提出了一种选择性大空间定位算法。面对移动节点特定的定位空间要求以及定位精度要求,采用蒙特卡罗方法研究了测距误差、信标网络参数配置对移动节点定位精度以及可定位空间的作用关系,提出的仿真算法模式对于设计评估满足一定精度要求的无线传感网络可定位空间探索具有一定的指导意义。 关键词:无线传感网络;大空间定位算法;精度评估中图分类号:TP702 文献标识码:A 文章编号:1009-0134(2015)04(上)-0071-04Doi:10.3969/j.issn.1009-0134.2015.04(上).22 收稿日期:2014-07-10 基金项目:国家自然科学基金资助:基于无线传感网络引导的高精度超大空间坐标测量网络构建关键技术(51275149)作者简介:刘文文(1961 -),女,副教授,博士,主要从事仪器设计、光学检测系统设计、现代控制理论和测控软件 开发领域的研发工作。 0 引言 无线传感网络的很多应用都涉及距离位置信息,基于无线传感网络的大空间定位技术也因此成为这一研究热点的关键基础技术。无线传感网络定位技术有基于非测距定位技术和基于测距定位技术,基于测距的定位技术分为基于信号接收强度指示值测量(RSSI )方法、基于到达时间测量(TOA )方法以及基于时间差测量(TDOA )等方法等。本文对基于时间差的测量方法(TDOA )进行分析研究和仿真,面对距离测量精度和范围的限制,寻找高精度的定位算法,面向无线传感网络结构参数通过仿真评估大空间定位精度。研究对设计满足一定定位精度的无线传感网络具有指导意义。 1 原理分析及算法 基于距离测量的大空间定位方法通过测量移动节点到信标节点的距离实现移动节点的空间定位,高精度定位的关键点在于高精度的距离测量方法及高精度的定位算法。 假设在移动节点P(x,y,z)周围有n 个位置已知的信标节点G 1(x 1,y 1,z 1),G 2(x 2,y 2,z 2),…, G n (x n ,y n ,z n )参与测量,如图1所示,它们与移动节点的距离的测量值为D 1,D 2,…,D n ,而理论距离为: 1,2,,j d j n == (1) 以测量距离与其理论值的残余误差平方和最小为原则定位移动节点P(x,y,z),则测量模型为: ∑=?n j j j d D Min 12 )( (2) 这是一个无约束非线性优化问题,理论上可以用非线性无约束优化方法求解[1]。在此,笔者提出一种线性迭代算法求解该非线性优化问题。 G2 G4 D2 ????3 ????* D1 D1 G1 D4 D3 G3 图1 移动节点与信标节点
摘要 无线定位服务是一种有着广阔市场前景的移动增值业务,基本原理是利用现有蜂窝网络,通过对各种位置特征参数,包括到达时间(TOA)、到达时间差(TDOA)、到达方向(DOA)的测量和估计,来实现移动用户的定位。本论文对无线通信网络中基于TDOA的无线定位技术进行了研究。 本文分析了国内外相关研究现状,给出了移动台定位的几种基本方法,并给出了TDOA定位的双曲线数学模型,分析了基于TDOA定位的Chan算法、遗传算法(GA)和差分演进算法(DE),并对其进行了计算机仿真。仿真结果表明,三种算法各有优缺点:Chan算法定位精度较低但运算速度很快,GA算法和DE算法定位精度高但收敛时间较长。 在上述研究的基础上,本论文提出了三种新的定位算法:基于TDOA的Chan-GA算法、Chan-DE算法和Chan-IDE算法。并在相同的仿真环境下进行比较,仿真结果表明,在保证种群数量的情况下,所提的算法性能稳定,能找到逼近全局最优点的解,相对于Chan算法精度更高,相对于以前的算法在保证收敛性能的前提下有更快的收敛速度。 关键词:移动台定位;到达时间差;遗传算法;差分演进算法;免疫算法
ABSTRACT Cellular wireless location service is a new mobile value-added service with a good market future. Its basic principle is to implement mobile user location through estimating characteristic parameters relative to position, including time-of-arrival (TOA), time-difference-of-arrival (TDOA), direction-of-arrival (DOA), etc. This thesis aims at the research of wireless location technology based on time-related measurements in Wireless Communication System. The thesis analyzes the domestic and foreign correlation research of present situation, and gives several essential methods of mobile location. After that, the mathematical model of TDOA hyperbolic equations is established, three location algorithms based on time-difference-of-arrival (TDOA), Chan, genetic algorithm and Differential Evolution are analyzed, and have been carried on the simulation to them. The simulation results show that all the algorithms have the advantages and disadvantages.The Chan algorithm has bad location accuracy and very quick operating speed. To the contrary, the genetic algorithm and Differential Evolution have a high accuracy and a fast convergence time. Based on the above investigation, three new location algorithms called Chan-GA algorithm, Chan-DE algorithm and Chan-IDE algorithm based on TDOA measurements are put forward. Carrying on the computer simulation to them under the same environment, the simulation results show that if the population size is big enough, the algorithm is robust and can find the coordinates. It has a higher accuracy than Chan algorithms and a faster convergence time than genetic algorithm. Key words: Mobile location; TDOA; Genetic algorithm; Differential Evolution; Immune algorithm
基于RSSI的室内定位算法实现 1.背景 随着现代通信、网络、全球定位系统(Global Position System,GPS)、普适计算、分布式信息处理等技术的迅速发展,位置感知计算和基于位置的服务(Location Based Setvices,LBS)在实际应用中越来越重要。GPS是目前应用最广泛和成功的定位技术。由于微波易被浓密树林、建筑物、金属遮盖物等吸收,因此GPS只适合在户外使用,在室内场合,由于信道环境复杂、微波信号衰减厉害、测量误差大,GPS并不适用。近年来基于低成本、低功耗、白组织的无线传感网网络(Wireless Sensor Network,WSN)定位技术得到了科研人员的重视和研究,具有广泛地应用前景。根据定位过程中是否实际测量节点间的距离,可将定位算法分为基于测距(Range-based)的定位和距离无关(rang-free)的定位。基于测距的定位先由未知节点硬件接收部分参考节点发射的无线信号并记录下TOA(Time of Arrival)、AOA(Angle of Arrival)、TDOA(Time Difference of Arrival)、RSSI(Received Signal strength Indicator)等测距度量值,然后将测距度量值转为未知节点的参考节点的距离和方位,然后再采用相关算法如三边测量法、三角测量法、极大似然估计法等来计算未知节点的位置。由于RSSI检测设备和机制简单,硬件成本低,实现简单,可通过多次测量平均获得准确的信号强度值,降低多径和遮蔽效应影响,因此基于RSSI测距的定位技术成为今年来室内定位研究的热点。 2.RSSI简介及原理 2.1 RSSI简介 基于RSSI(接收信号强度)的测距技术是利用无线电信号随距离增大而有规律地衰减的原理来测量节点间的距离.根据读取节点射频芯片寄存器的值,可以得到发射节点的发射信号强度.接收节点根据接收到的信号强度,计算出信号的传输损耗,利用理论或者经验模型将无线信号的传输损耗值转换为距离值.该测距技术只需节点具备无线收发器即可完成,不需要增加额外的硬件,也正因此应用成本较低。 2.2RSSI测距原理 通过大量工程实践可以发现,无线信号传播服从概率分布,并可归纳出无线信号传播的概率模型——Shadowing 模型,其一般形式为 P r(d) = p r(d0)-10nlg(d/d0)+X dBm , (1) 式中,pr(d)为收发节点距离为d时的接收信号强度(单位为dBm),d0位收发节点的参考距离,n为由环境决定的路径损耗指数。 在实际应用中,可采用简化的Shadowing模型: P RSSI = P0– 10nlg(d/d0), (2) 式中,d0=1m;P RSSI为节点接收到的RSSI值(单位为dBm),P0为信号传输1m远处接收信号的功率。为了便于表达和计算,通常取d0为1m。于是可得 RSSI = A – 10nlg(d) (3) 其中,A为无线收发节点相距1m时接收节点接收到的无线信号强度RSSI值,d即为所要求的节点间的距离。A和n都是经验值,和具体使用的硬件节点、无线信号传播的环境密切相关。因此在不同的实际环境下A和n参数不同,其测距模型也不同。但在充分研究环境因素的影响后,RSSI可以用来进行室内和室外的测距及定位。 3.基于RSSI的定位算法 RSSI测距定位算法实现流程如下图1:
TDOA定位的Chan算法MATLAB源代码。 function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q) %********************************************************* % CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算 % 输入参数: % R(N-1×1): TDOA测量值 % Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行% 输出参数: % POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决 % POS1(2X1) :定位结果1 % POS2(2X1) :定位结果2 % POS3(2X1) :定位结果3 % POS4(2X1) :定位结果4 %这段程序用于自己产生算法输入参数,用于算法测试 % delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵 % M=4; %参考基站外的基站数量 % Xb = 20;Yb = 100; %参考的基站坐标 % X = zeros(M,2);%M行2列0 % a = 2*pi/M; % for i=1:M %生成其他基站的坐标 % X(i,1) = 400*cos(a*(i-1)); % X(i,2) = 400*sin(a*(i-1)); % end % Xreal = -150;Yreal = 200;%移动台真实坐标 % %产生TDOA测量结果 % Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实距离 % N = normrnd(0,delta,1,M);%产生TDOA测量误差正态分布均值0 标准差delta 返回一个N数组,下标为1 到M % Kb = Xb^2+Yb^2; % R = zeros(M,1); % for i=1:M %产生TDOA测量值 % R(i) = -Rb+sqrt((Xreal - X(i,1))^2+(Yreal - X(i,2))^2)+N(i); % end % Q = (0.5*eye(M)+0.5*ones(M))*(delta^2); % Pbs = [Xb Yb;X];%矩阵 % N = 5; % [POS_ref POS1 POS2 POS3 POS4] = TDOA_chan(R,Pbs,Q) N = size(Pbs,1);%维度 K = zeros(1,N); K = Pbs(:,1).^2 + Pbs(:,2).^2; ha = 0.5*(R.^2-K(2:N)+K(1)) Ga = -[Pbs(2:N,1)-Pbs(1,1) Pbs(2:N,2)-Pbs(1,2) R]
第27卷第5期南京气象学院学报V o l.27N o.5 2004年10月Jou rnal of N an jing In stitu te of M eteo ro logy O ct.2004 文章编号:100022022(2004)0520688207 Arc I nfo下卫星遥感火点空间定位算法研究 殷剑敏 (江西省气象科学研究所,江西南昌 330046) 摘 要:应用A rc Info地理信息系统和M apO b jects组件空间分析技术、数据库技术, 对森林火点卫星遥感信息的地理定位技术进行了研究,结合1:250000地理信息数 据,研制了快速获取火点周围地理信息的技术流程及计算方法,开发了业务化系统, 实现了自动化操作。尤其在多火点的情况下更能显示出其优越性,相同情况下,比手 工地理定位提高了定位精度,工作效率提高了10倍以上。投入业务运行以来,在森林 防火工作中发挥了重要作用,为火点监测赢得了时间,取得了明显的社会效益。 关键词:A rc Info;空间定位;算法;卫星遥感;森林火点 中图分类号:S429 文献标识码:A 森林是地球生态系统的重要组成部分,近年来,由于气候变暖等原因,森林火灾发生频率趋于增加。森林火灾不仅造成巨大的经济损失,而且还会导致生态和灾害链后果,因此,对林火行为的研究,具有重要的理论意义及生产实用价值。国内外早期对火险天气等级的气象预报做了大量的研究,取得了许多可投入业务使用的研究成果[127]。近年来,许多学者开始应用地理信息系统(Geograp h ic Info r m ati on System,简称G IS)等高新技术,对森林火场的蔓延、火场周边气象条件的变化及灾后损失评估作了大量数值模拟研究[8]。利用遥感技术监测森林火灾,国外始于20世纪60年代初期的航空红外探测,而在国内,从80年代末开始广泛运用时间、空间分辨率相对较高的极轨气象卫星对森林火灾进行了实时动态监测。卫星遥感具有范围大、视野广、迅速、准确等特点,并能提供火点的经纬度、火灾面积、火点性质(燃烧区、过火区、亚像元等)等火场信息,目前气象部门已广泛应用极轨气象卫星监测森林火点,并开发出相应的森林火点卫星遥感处理软件[9210]。但仅依靠卫星遥感技术监测森林火点,长期以来一直存在火点的地面定位问题,因为它只能自动判读森林火点的经纬度,还要人工在地图上查找具体位置后才能对外提供服务。这种方式存在以下缺点:人工查找地图速度慢,尤其是查找大比例尺的高精度地图则更不方便;人工查图误差大,容易出错;信息量少,满足不了当前防火服务需求;信息没有数字化,不能迅速利用现代通信手段对外发布。 地理信息系统具有强大的空间信息管理和分析计算功能,有关部门已经将它应用于110 收稿日期:2003209202;改回日期:2003212230 基金项目:江西省科技厅“江西省森林火险监测预警系统研究”项目;江西省气象局“森林火点卫星遥感地理定位研究” 项目 作者简介:殷剑敏(19622),男,江苏常州人,高级工程师,博士生,研究方向:地理信息系统在气象上的应用研究.
万方数据
万方数据
短距离高精度无线定位方法的研究及其实现 作者:李澍, Li Shu 作者单位:四川省乐山职业技术学院,四川,乐山,614000 刊名: 计算机光盘软件与应用 英文刊名:COMPUTER CD SOFTWARE AND APPLICATIONS 年,卷(期):2011(4) 参考文献(5条) 1.孙利民.李建中.陈渝.朱红松无线传感器网络 2005 2.段渭军.王建刚.王福豹无线传感器网络节点定位系统与算法的研究和发展[期刊论文]-信息与控制 2006(02) 3.孙佩刚.赵海.罗玎玎.张晓丹 尹震宇智能空间中RSSI定位问题研究[期刊论文]-电子学报 2007(7) 4.张洁颖.孙懋珩.王侠塞于RSSI和LQI的动态距离须计算法 2007 5.IEEE 1588 本文读者也读过(10条) 1.邓咸奎.李鹏.尹中南.Deng Xiankui.Li Peng.Yin Zhongnan无线定位系统中的异步测距算法研究[期刊论文]-微型机与应用2011,30(6) 2.朴艳.袁超伟无线定位的实现及应用[期刊论文]-通信世界B2007(40) 3.肖卫初.陈伟宏.龚伦峰.XIAO Wei-chu.CHEN Wei-hong.GONG Long-feng一种新的几何无线定位方法[期刊论文]-科学技术与工程2011,11(13) 4.杨燕玲.谢显中.熊思民.YANG Yan-ling.XIE xian-zhong.XIONG Si-min无线定位系统中提高精确度的一种方法[期刊论文]-重庆邮电学院学报(自然科学版)2005,17(3) 5.董欢欢.葛为民.DONG Huan-huan.GE Wei-min一种基于无线传感器网络的AGV精确定位方法[期刊论文]-天津理工大学学报2011,27(1) 6.贾树利.张强无线定位技术研究[期刊论文]-黑龙江科技信息2011(9) 7.樊晓翔.王福豹.严国强.李阳自适应无线传感器网络定位系统研究[会议论文]-2008 8.王侃磊.张倩.胡爱群短距离高精度无线定位方法的研究及实现[会议论文]-2009 9.朱诗兵.杨晟.李长青.陈刚.ZHU Shi-bing.YANG Sheng.LI Chang-qing.CHEN Gang无线传感器网络移动节点三维测距解析定位[期刊论文]-装甲兵工程学院学报2009,23(5) 10.黄晓利.王福豹.段渭军.杨跃.Huang Xiaoli.Wang Fubao.Duan Weijun.Yang Yue无线传感器网络TDOA测距误差分析与校正[期刊论文]-计算机测量与控制2008,16(7) 本文链接:https://www.doczj.com/doc/b813348557.html,/Periodical_jsjgprjyyy201104035.aspx
* 陈守稳顾尔顺 (航天工业总公司二院二部北京100854) 摘要对几种被动定位方法的定位精度进行了计算比较,选择了可行的定位方法,分析了影响定位精度的有关因素,并对其加以说明。 主题词被动定位,测向交会,纯时差,测向)测时差,定位精度 1引言 被动定位即无源定位,其特点是不能获得辐射源的距离信息,因此,必须采用多站测量对目标进行定位。被动定位通常是利用单站的测角信息或多站测时差来完成,文中就测向交叉、测时差、测向)时差混合定位三种方法进行了定位误差的计算,对结果进行了分析并得到结论。 2被动定位算法模型 211测向交叉定位法 是指通过测量辐射源的到达角京国防工版社数运算确定目标位置。以下推导中京均假设有N部雷达京在直版坐标系(x轴正东京y轴正北京z轴天顶)中站址分别为(x i京y i京z i)京i= 1京2京,京N京各雷达对辐射源测得的方位版和俯仰版是(B i京E i)。 假设已知1号站测得目标的角度(B1京E1)京i号站测得目标版度(B i京E i)京可利用下面几种方法求取R1。 方法1: R1=(x1-x i)sin B i-(y1-y i)cos B i cos E1sin(B1-B i) (1) 方法2: R1=(x1-x i)sin E i-(z1-z i)cos E i cos B i sin E1cos E i cos B i-cos E1cos B1sin E1 (2) *收稿日期:1998-05-28 第26卷第5期现代防御技术1998年9月
方法3: R 1= (y 1-y i )sin E i -(z 1-z i )cos E i sin B i sin E 1cos E i sin B i -cos E 1sin B 1sin E i (3) 方法4: 可以利用前述的3种方法中的任一种京将式(1)、式(2)或式(3)中的全部下标1改成下标j 京即可计算出目标到j 号站的斜距R j 京然后利用下列公式即可求出R 1: x t =x j +R j cos E j cos B j y t =y j +R j cos E j sin B j z t =x j +R j sin E j R 1=[(x t -x 1)2 +(y t -t 1)2 +(z t -z 1)2] 1/2 (4) 采用1号(-2813京-2813京0)京2号(2813京2813京0)的布站方式京比较方法1京2京3 对空中各点的定位误差京取最小值京记录其对应的定位方法号码京各定位方法在xOy 平面的分布见图1京图例1京2京3分别对应定位方法1京2京3。方法1中京目标高度10km 京测向精度015b 条件下京R R 1的 等误差线在 xOy 平面的分布见图2(单位:km ) 。 图1 最小误差对应的方法在xOy 平面的分布图 图2 xOy 平面R R 的 等误差曲线 由 图 1可以看出京采用同样的布站方式京绝大部分空间中方法1的定位精度高京只有很少一 部分空间方法2和3的精度高京这一部分空间主要集中在两雷达站连线所在的垂直平面附近。由图2可以看出京方法1中京由两站组成的单基线定位系统京其定位精度仅在一扇形区域内很高京基线所在垂直平面内及附近京定位精度迅速下降。而且由式(1)知京B 1=B i 时京R 1无 解。为了在整个空域内能够对辐射源定位 京可以采用3部雷达组成三角形布局。根据以上分析可 得到结论。在测向交会法中京可以只选用方法1。 212 纯时差定位法 对于三维空间的目标京至少需要4个测量站对目标定位。以下假设主站坐标为(x 1京y 1京z 1)=(0京0京z 1)京其它3个副站的坐标分别为(x i 京y i 京z i )京(i =2京3京4)京目标位置坐标是(x i 京y i 京z i )京目标到各站的距离分别是R i (i =1京2京3京4)。此系统可以测出目标到主站与其它3个附站的时间差$t 京对应的距离差如下: 18 现代防御技术 第26卷
TDOA定位的Chan算法Matlab源码 (2009-07-26 12:47:49) 标签: 杂谈 TDOA定位的Chan算法Matlab源码 function [POS_ref,POS1,POS2,POS3,POS4] = TDOA_chan(R,Pbs,Q) %% TDOA定位定位Chan算法 % GreenSim团队原创作品,转载请注明 % Email:greensim@https://www.doczj.com/doc/b813348557.html, % GreenSim团队主页:https://www.doczj.com/doc/b813348557.html,/greensim % [color=red]欢迎访问GreenSim——算法仿真团队 →[url=https://www.doczj.com/doc/b813348557.html,/greensim]https://www.doczj.com/doc/b813348557.html,/gree nsim[/url][/color] %********************************************************* % CHAN算法,假设移动台与各基站位置较近,需进行三四WLS计算 % 输入参数: % R(N-1×1): TDOA测量值 % Pbs(N×2): 基站的坐标,第一列为X,第二列为Y;参考基站坐标位于第一行
% 输出参数: % POS_ref(2X1):第一次WLS的估计结果,作为参考作最终定位结果的判决 % POS1(2X1) :定位结果1 % POS2(2X1) :定位结果2 % POS3(2X1) :定位结果3 % POS4(2X1) :定位结果4 %%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%% %这段程序用于自己产生算法输入参数,用于算法测试 % delta = 10; %TDOA测量误差的标准差,用于产生Q矩阵 % M=4; %参考基站外的基站数量 % Xb = 20;Yb = 100; %参考的基站坐标 % X = zeros(M,2); % a = 2*pi/M; % for i=1:M %生成其他基站的坐标 % X(i,1) = 400*cos(a*(i-1)); % X(i,2) = 400*sin(a*(i-1)); % end % Xreal = -150;Yreal = 200;%移动台真实坐标 % %产生TDOA测量结果 % Rb = sqrt((Xreal - Xb)^2+(Yreal - Yb)^2);%移动台到基站的真实