无位置传感器直流无刷电机原理
位置传感器的直流无刷电机的换向主要靠位置传感器检测转子的位置,确
定功率开关器件的导通顺序来实现的,由于安装位置传感器增大了电机的体积,
同时安装位置传感器的位置精度要求比较高,带来组装的难度。
研究过程中发现,利用电子线路替代位置传感器检测电机在运行过程中产
生的反电动势来确定电机转子的位置,实现换向。从而出现了无位置传感器的
直流无刷电机,其原理框图如图3.1所示。
武汉理工大学硕士学位论文
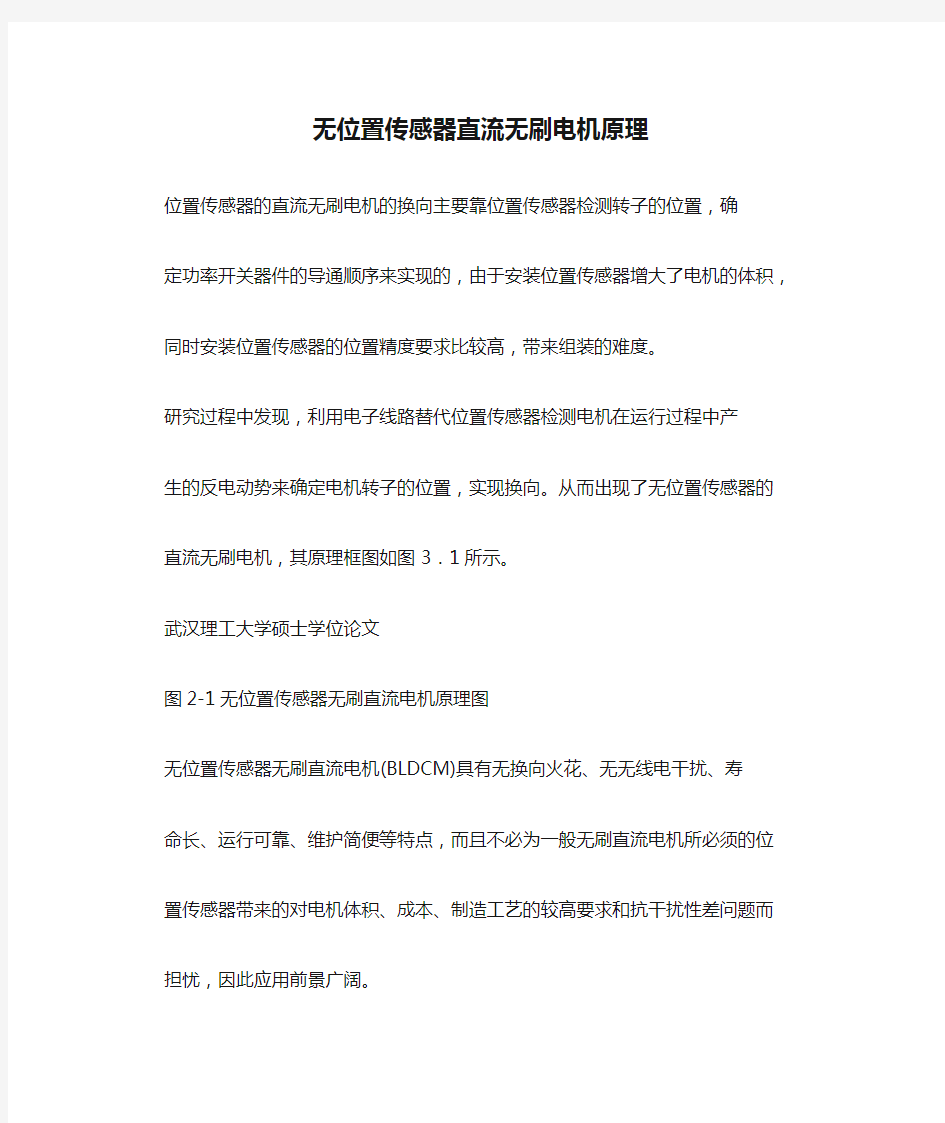
图2-1无位置传感器无刷直流电机原理图
无位置传感器无刷直流电机(BLDCM)具有无换向火花、无无线电干扰、寿
命长、运行可靠、维护简便等特点,而且不必为一般无刷直流电机所必须的位
置传感器带来的对电机体积、成本、制造工艺的较高要求和抗干扰性差问题而
担忧,因此应用前景广阔。
由图2-1无刷直流电动机的运行原理图可知,当电机在运行
过程中,总有
一相绕组没有导通,此时可以在该相绕组的端口检测到该绕组产生反电动势,
该反电动势60度的电角度是连续的,由于电机的规格,制造工艺的差别,导致
相同电角度的反电动势值是不同,如要通过检测反电动势的数值来确定转子的
位置难度极大。因此必须找到该反电动势与转子位置的关系,才能确定转子的
位置。
由于BLDCM的气隙磁场、反电势、以及电流波型是非正弦的,因此采用
直交轴坐标变化不是很有效的分析方法。通常直接利用电机本身的相变量来建
立数学模型。假设三相绕组完全对称,磁路不饱和,不计涡流和磁滞损耗,忽
略齿槽相应,则三相绕组的电压平衡方程则可以表示为:根据电压方程得电机的等效电路图,如图2.2所示:
2.3.2反电势法电机控制的原理
无刷直流电机中,受定子绕组产生的合成磁场的作用,转子沿着一定的方
向转动。电机定子上放有电枢绕组,因此,转子一旦旋转,就会在空间形成导
体切割磁力线的情况,根据电磁感应定律可知,导体切割磁力线会在导体中产
生感应电热。所以,在转子旋转的时候就会在定子绕组中产生感应电势,即运
动电势,一般称为反电动势或反电势哺1。·
对于稀土永磁无刷直流电机,其气隙磁场波形可以为方波,也可以是梯形
波或正弦波,与永磁体形状、电机磁路结构和磁钢充磁等有关,由此把无刷直
流电机分为方波电机和正弦波电机。对于径向充磁结构,稀土永磁体直接面对
均匀气隙,由于稀土永磁体的取向性好,所以可以方便的获得具有较好方波形
状的气隙磁场,对于方波气隙磁场的电机,当定子绕组采用集中整距绕组,即
每极每槽数q=l时,定子绕组中感应的电势为梯形波,如图加
对于两相导通星形连接、三相6状态控制的永磁无刷直流电机,方波气隙
磁密度在空间的宽度应大于120。电角度,在定子绕组中感应的梯形波反电势的平
顶宽也应大于120。电角度。方波无刷直流电机一般采用方波电流驱动,即与120。
导通型逆变器相匹配,由逆变器向方波电机提供三相对称的、宽度为120。电角度
的方波电流。方波电流应与反电势相位一致或位于梯形波反电势的平顶宽度范
围内,这样才满足“最佳换相逻辑’’,如图3-4所示。本文研究的“反电势法"
无位置传感器控制方法主要面向的就是这种具有方波气隙磁密分布、梯形波反
电势无刷直流电机。下面介绍“反电势法"控制的原理。
e486
图2.4绕组反电势与电流波形
当BLDCM的某相绕组反电势过零时,转子直轴与该相绕组轴线恰好重合,
因此只要检测到各相绕组反电势的过零点,就可获知转子的若干个关键位置,
再根据这些关键的转子位置信号,做相应的处理后控制BLDCM换相,实现
BLDCM连续运转,这就是“反电势法"BLDCM控制。从图24中可以看出。
t=30。电角度为A相反电势过零点时刻,控制电路检测到这一时刻,延时30。电
角度,到30。电角度时切换到A相导通,A相导通120。电角度后,至!U180。电角度
时关断A相,切换到B相导通。依此类推,就可以实现电机的连续运转,并且
满足“最佳换相逻辑"。
无刷直流电机绕组反电势的过零点严格的反映转子磁极位置,因此,只要
能够准确的检测到绕组反电势的过零点信号,就可以判断出转子的关键位置,
经过30。电角度延时处理后,就可以作为绕组的换相时刻,再根据功率管的导通
顺序触发相应的功率管,就能够实现无刷直流电机的换相操作,保证电机按固
定的方向连续旋转。图2.5给出了反电势波形与逆变器功率管导通顺序逻辑关
系,这样可以保证电机换相满足“最佳换相逻辑一,减小转
矩脉动。
2.3.3反电势特性分析
为了确定电机转速和反电势大小的关系,同时给后面“三段式’’起动技术提
供理论依据,这里来推导BLDCM反电势的计算公式,分析无刷直流电机和反
电势特性。
为了便于分析,公式推导过程中忽略功率管动作的过渡过程和电枢绕组的电
感。单根导体在气隙磁场中感应的电势为t
e1鼠LV (1—7)
式中,
B——气隙磁感应强度;
I-一导体有效长度;
v_导体相对磁场的线速度。
y;等疗。2pr=n(m/s)(1-8) 60 60
式中,
n——电机转数(r/mi n)o 卜电枢内径;
r——极距;r极对数。
设电枢绕组每相串联匝数为%,则每相绕组的感应电势为:%一2ewo(V) (1—9)
将(1.8)式代入(1-7)式得:
P;B,L2pr-啬O(V)(1-10)
方波气隙磁感应强度对应的每极磁通为:
九;B6afzL(Wb) (1-11)
武汉理工大学硕士学位论文
式中a;为计算极弧数,则有:
P-2p九意‘V) (1-12)
将式1-12代入式1-9得每相绕组感应电势:
日。面P%九一(V)(1-13)
则线电势,即电枢感应电势为:
E l2E,。面zp%丸一一e九一(V)(1-14)
式中等杉——电势常数。
无刷直流电机的反电势计算公式和一般直流电机相同,反电势大小与每极
磁通量及转速有关。如保持每极磁通量不变,无刷直流电机的反电势便和转速
成正比;反之,如保持转速不变,无刷直流电机的反电势将和每极磁通量成正
比。从公式(1.14)中也可以看出,.当电机静止或转速很低时,反电势为零或很小,
无法利用绕组反电势获得转子位置信号,电机无法起动。因此“反电势法"无
刷直流电机控制必须采用其他方法来使是电机起动,这将在
下面作详细介绍。
2.3.4无位置传感器直流无刷电机的启动
启动功能在无位置传感器无刷电机中相当重要。因为在静止或低速状态下
反电势值为0或很小,无法用反电势法来判定转子的位置,所以在启动状态不
能使用反电动势过零的方法。
启动方法分为硬件方式和软件方式两种。硬件方式因需要额外的电路,不
适合于电路要求简单的航模控制领域。因此,本文在设计时采用软件三段式的
方法来实现电机的启动。
首先是转子定位,通过导通上下桥臂各一个MOSFET,通电一段时间后就
完成了初始定位。然后从该位置开始,给电机加载电压,然后检测过零点,如
果检测道过零点就提前切换功率管的导通状态,如果检测不到就延时一段时间,
再按照前面说明的换向表依次导通各个功率管,每个状态保持的时间根据加速
情况决定,逐步的缩短每个状态的保持时间,提高逆变器的输出频率,保证电
机在不失步的前提下提高转子的转速。
因为反电势过零检测法构成的控制系统是一个从开环进入到闭环的控制系
武汉理工大学硕士学位论文
统,它具有自调节、自稳定的能力,无论在过电压还是欠电压情况下切换到闭
环系统,对于控制系统来说只相当于一个电压扰动,控制系统能够根据电压变
化调节转速,使电机稳定运行。因此,只要外加控制加速到一定速度,能够准
确的检测到反电势过零点信号,电机都能够平稳切换。这样就能够避免电机在
起动初期会产生大电流,减少了对主电路的冲击,延长了功率管的寿命。