
收稿日期:2007 10 17
作者简介:邢丽娟(1973 ),女,内蒙古包头市人,讲师,硕士,主要从事智能仪器及计算机过程控制的研究与应用。
文章编号:1004 2474(2009)02 0215
03压电加速度测量系统的设计
邢丽娟,杨世忠
(青岛理工大学自动化工程学院,山东青岛266520)
摘 要:现代工业和自动化生产过程中,动态测试中振动和冲击的精确测量很重要。常用压电加速度传感器
来获取冲击和振动信号。在研究压电加速度传感器的基础上,分析了测量的工作原理,提出加速度测量的设计方法;加入温敏元件,进行温度补偿,使其应用温度范围扩大。给出适合该类传感器的信号检测电路和加速度测量系统组成。此设计方法具有较高的准确性和应用推广价值,并具有结构简单,成本低,性能稳定等优点。
关键词:压电加速度传感器;测量;设计中图分类号:T P212 文献标识码:A
Design for Piezoelectric Accelerometer Measurement System
XING Li juan,YANG Shi zhong
(College of Automation En gineering,Qingdao T echnological University,Qingdao 266520,Chin a)
Abstract:In modern industry and automatic pro ductio n,the accurate measurement of the v ibration and str ike in test ing dynamically seems especially import ant.Fo r the acquisit ion of signal,the mo st co mmon used sensor is piezoe lect ric accelero meter.On the basis o f researching piezo electric acceler ometer senso r,this paper analyzed the w o rk pr inciple o f measurement,pro po sed a kind o f acceler ometer measur ement desig n method.A dding temperature sensor to com pensat e t emperat ur e,the applied temperature rang could be w ider.Detectio n cir cuit suiting this kind of sensor and the sy stem co mpo sitio n o f acceler ometer measurement was also g iv en in the paper.T his desig n metho d w as ac curate w ith hig h v alue for application and ext ensio n.A lso the st ruct ur e w as simple,the pr ice was lo wer and the per fo rmance w as stable.
Key words:piezoelect ric accelero meter senso r;measurement;design
现代工业和自动化生产过程中,非电物理量的测量和控制技术会涉及大量的动态测试问题。所谓动态测试是指量的瞬时值以及它随时间而变化的值的确定,即被测量为变量的连续测量过程。它以动态信号为特征,研究了测试系统的动态特性问题,而动态测试中振动和冲击的精确测量尤其重要。振动与冲击测量的核心是传感器,常用压电加速度传感器来获取冲击和振动信号。压电式传感器是基于某些介质材料的压电效应[1],当材料受力作用而变形时,其表面会有电荷产生,从而实现非电量测量。压电式传感器具有体积小,质量轻,工作频带宽等特点,因此在各种动态力、机械冲击与振动的测量以及声学、医学、力学、宇航等方面都得到了非常广泛的应用。
1 测量原理
压电加速度传感器采用具有压电效应的压电材料作基本元件,是以压电材料受力后在其表面产生电荷的压电效应为转换原理的传感器。这些压电材料,当沿着一定方向对其施力而使它变形时,内部就
产生极化现象,同时在它的两个相对的表面上便产生符号相反的电荷;当外力去掉后,又重新恢复不带电的状态;当作用力的方向改变时,电荷的极性也随
着改变。
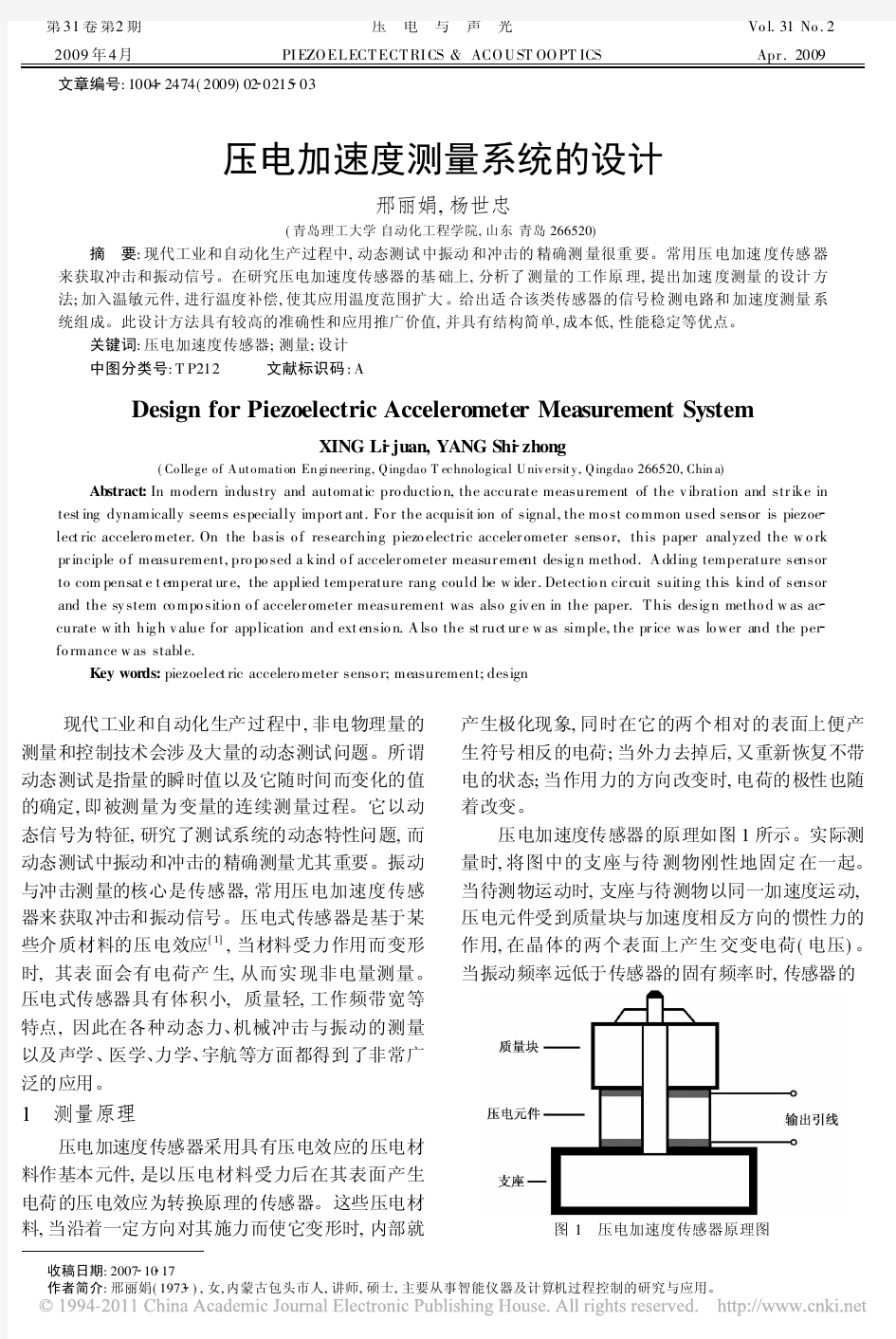
压电加速度传感器的原理如图1所示。实际测量时,将图中的支座与待测物刚性地固定在一起。当待测物运动时,支座与待测物以同一加速度运动,压电元件受到质量块与加速度相反方向的惯性力的作用,在晶体的两个表面上产生交变电荷(电压)。当振动频率远低于传感器的固有频率时,传感器的
图1 压电加速度传感器原理图
第31卷第2期压 电 与 声 光
Vo l.31No.22009年4月
PI EZO EL ECT ECT RI CS &ACO U ST OO PT ICS
Apr.2009
输出电荷(电压)与作用力成正比。电信号经前置放大器放大,即可由一般测量仪器测试出电荷(电压)大小,从而得出物体的加速度。
压电材料可分为压电晶体和压电陶瓷两大类,因压电陶瓷的压电系数比压电晶体的大,且采用压电陶瓷制作的压电式传感器的灵敏度较高,故本系统压电元件采用压电陶瓷,极化方向在厚度方向(z 方向)[2]
。当加速度传感器和被测物一起受到冲击振动时,压电元件受质量块惯性力的作用,根据牛顿第二定律,此惯性力是加速度的函数。设质量块作用于压电元件的力为F 上,支座作用于压电元件的力为F 下,则有
F 上=Ma (1) F 下=(M +m)a
(2)
式中 M 为质量块质量;m 为晶片质量;a 为物体振
动加速度。
由式(1)、(2)可得晶片中厚度方向(z 方向)任一截面上的力为
F =M a +ma(1-z /d)(3)
式中d 为晶片厚度。则平均力为
F =
1d
d
0Ma +ma 1-z d
d z =
M +12
m a
(4)
因晶片为压电陶瓷,极化方向在厚度方向(z 方向),作用力沿着z 方向,故此时外加应力只有T 3,不等于零,其平均值为 T 3=1A (M +1
2
m)a
(5)
式中A 为晶片电极面面积。
选用D 型压电常数矩阵,得电荷Q =d 33 T 3A =d 33(M +12
m)a
(6)
式中d 33为压电常数。由于质量块一般采用质量大的金属钨或其他金属制成,而晶片很薄,即有M m,故式(6)通常写为
Q =d 33M a
(7)
由式(7)可知,压电元件的Q 和d 33、M 成正比,
根据测量电荷量就可得到加速度。
2 测量电路
由压电元件的工作原理可知,压电式传感器可看作一个电荷发生器。同时,它也是一个电容器,晶体上聚集正负电荷的两表面相当于电容的两个极板,极板间物质等效于一种介质,则其电容量为
C a = r 0A
d
(8)
式中 A 为晶片电极面面积;
r 为压电材料的相对介电常数; 0为真空介电常数。
因此,压电传感器可以等效为一个与电容相串联的电荷源。压电传感器本身的内阻抗很高,而输出能量较小,因此,它的测量电路通常需接入一个高输入阻抗的前置放大器,其作用如下:
(1)把它的高输出阻抗变换为低输出阻抗。(2)放大传感器输出的微弱信号。本设计中前置放大器采用电荷放大器。
压电传感器在实际使用时与测量仪器或测量电路相连接,因此还需考虑连接电缆的等效电容C c 、放大器的输入电阻R i 、输入电容C i 及压电传感器的泄漏电阻R a ,这样压电传感器在测量系统中的实际等效电路如图2所示。
图2 压电传感器测量等效电路图
图中,A K 为运算放大器增益。由于运算放大器的R i 极高,而R a =109
~10l4
,所以可认为R i 和R a 是开路的。设运算放大器输入电压为U i ,输出电压为U o ,根据运算放大器理论和电路理论得电荷量为
Q =U i (C a +C c +C i )+(U i -U o )C F
(9)
式中C F 为反馈电容。将U o =-A K U i 代入式(9)得
U o =
A K Q
(C a +C c +C i )+(1+A )C F
(10)
若放大器开环增益足够大,满足(1+A K )C F C a +C c +C i 时,式(10)可表示为
U o =-Q
C F
(11)
由式(11)可知,在一定情况下,电荷放大器的输出电压与传感器的电荷量成正此,并且与电缆分布电容无关。因此,采用电荷放大器时,即使联接电缆长度在百米以上,其灵敏度也无明显变化,这是电荷放大器的突出优点。
3 测量系统结构
压电加速度测量系统组成电路结构如图3所示。压电加速度传感器是将被测加速度的变化转换为电荷量的变化;电荷放大器将传感器输出的微弱信号放大;信号处理电路将信号转化为适合A/D 转换的信号;处理后的电压信号通过A/D 转换后传送到单片机系统,通过计算机对数据进行处理分析再
216压 电 与 声 光2009年
输出。
图3 压电加速度测量系统结构框图
由于压电陶瓷的压电特性易受温度影响,热胀冷缩造成的机械形变也会对输出产生影响,而普通
的压电加速度传感器都不具备补偿功能,直接将其应用,可靠性不好。环境温度对传感器的影响主要有压电材料的特性参数、压电材料的热释电效应和传感器结构3个因素。环境温度变化会使压电材料的压电常数d n 、介电常数 、电阻率 和弹性系数k 等机电特性参数发生变化。d n 和k 的变化将影响传感器的输出灵敏度; 和 的变化会导致时间常数 =RC 的变化,从而使传感器的低频响应变化。
由于金属材料与陶瓷材料的热膨胀系数相差较大[3]
,当温度发生变化时,质量块与支撑台间的距离会有微小变化,从而质量块对压电陶瓷的预压力发生变化;而压电陶瓷本身也受温度影响,因此,有
必要进行温度补偿。温度补偿的方法是通过实验对传感器在不同温度下所产生的温度漂移值进行标定,将标定结果以数据表的格式存入单片机中。实际测量中,单片机根据测得的温度自动进行结果的修正。
4 结束语
压电加速度传感器是基于某些介质材料的压电
效应,是典型的有源传感器,当材料受力作用而变形时,其表面会有电荷产生,从而实现加速度的测量。压电加速度测量系统的优点是通频带宽,量程大,体积小,质量轻,结构简单;且系统中增加了温度补偿,解决了普通压电加速度传感器受温度影响大的缺点,提高了它的性能和可靠性,可广泛应用于各种动态力、机械冲击与振动等测量领域,具有良好的开发前景与应用价值。参考文献:
[1]刘玲玲,田文杰,张福学.压电石英加速度传感器稳定性研究[J].压电与声光,2007,29(1):45 46.
[2]查万纪,葛立峰.基于T L 081的电荷信号适调电路的研究[J].微机发展,2005,4(4):69 71.
[3]
李智慧,姜印平,邵 磊.新型压电加速度传感器[J].传感技术学报,2003,3(3):345 347.
(上接第214页)
由超声电机的预压力特性可知[6,8]
,随着预压力的增加,超声电机堵转力矩也将增大,但增大的趋势逐渐变缓,预压力大到一定极限时电机将无法启动。虽然在真空环境下声悬浮作用可忽略,但只有在预压力较小时,运行于真空环境下的超声电机堵转力矩较常态才会有显著的提高。
3 结束语
本文对超声电机进行了真空环境实验研究。实验结果表明,超声电机在真空环境下可工作,但性能
较常态有所变化。具体表现为在真空环境下,超声电机温升较快,空载转速下降,且在预压力较小时堵转力矩增加明显。参考文献:
[1]
赵淳生.面向21世纪的超声电机技术[J].中国工程科学,2002,4(2):86 87.
[2]
金家楣,赵淳生.超声电机环形定子驻波的扭曲与旋转[J].压电与声光,2007,29(3):354 355.
[3]M ORIT A T ,N IIN O T ,A SAM A H.Ro tatio nal
f eedthro u
g
h using ult rasonic motor for hig h v acuum co ndition[J].V acuum,2002(65):85 90.[4]
M ORI T A T ,T AK A H ASH I S,A DA M A H ,et al.R o tat ional feedthroug h using an ultr asonic mo tor and its per for mance in ultr a hig h vacuum conditions[J].V acu um,2003(70):53 57.[5]曲建俊,程显敏,罗云霞,等.超声波马达的真空和温度特性研究[J].光学精密工程,2005,13(3):324 331.[6]赵向东,赵淳生.预压力对超声电机输出特性影响的实验研究[J].力学与实践,2002,24(4):46 48.
[7]
U EHA S,HA SH IM OT O Y ,KO IK E Y.N on contact transpo rtat ion using near field acoustic lev itation [J].U ltr asonics,2000,38:26 32.[8]
陈 超.旋转型超声电机理论模型的研究[D].南京:南京航空航天大学,2005:80 84.
第2期邢丽娟等:压电加速度测量系统的设计217
课程设计报告 题目基于单片机的压电加速度传感器 低频信号采集系统的设计 2014-2015 第二学期 专业班级2012级电气5班 姓名赵倩 学号201295014196 指导教师马鸣 教学单位电子电气工程学院 2015年7月6日
课程设计任务书 1.设计目的: ①掌握电子系统的一般设计方法和设计流程;并完成加速器低频信号的理论设计。 ②掌握应用电路的multisim等软件对所设计的电路进行仿真,通过仿真结果验 证设计的正确性,完成电路设计。 2.设计内容和要求(包括原始数据、技术参数、条件、设计要求等):压电式加速度传感器作为一种微型传感器,其输出信号比较微弱,通常为几十个毫伏或几百个微伏。所以有必要对其输出电压进行信号调理。主要包括电源模块、放大模块、滤波模块等组成。 3.设计工作任务及工作量的要求: (1)查阅相关资料,完成系统总体方案设计; (2)完成系统硬件设计; (3)对所设计的电路进行仿真; (4)按照要求撰写设计说明书;
一、压电式加速度传感器的概要 (4) 二、信号采集系统的总设计方案 (5) 三、信号采集系统分析 (6) 1、电荷转换部分: (6) 2、适调放大部分 (6) 3、低通滤波部分: (7) 4、输出放大部分 (7) 5、积分器部分: (8) 四、单片机软件设计 (8) 五、Multisim仿真分析 (10) 1.仿真电路图 (10) 2.仿真波形及分析 (11) 六、误差分析 (11) 1、连接电缆的固定 (11) 2、接地点选择 (12) 3、湿度的影响 (12) 4、环境温度的影响 (12) 七、改进措施 (12) 六、心得体会 (12) 七、参考文献 (13)
基于单片机的重力加速度测量 王磊 摘要:重力加速度通常使用重力加速度测量仪进行测量,其测量过程是通过两个光电门检测物体的下降时刻,由数字毫秒计显示物体所经历的时间,最后通过繁琐的手工计算求得,主要缺点是效率较低且不可避免粗大误差的影响。为了提高实验效率以及实验结果的准确度,我们对传统重力加速度测量仪进行了改进,主要是利用单片机对原实验的光电信号进行检测,通过VC编程完成较精确的计算、存储、显示以及数据处理等一系列工作,极大的改善了实验环境、丰富了实验内容以及提高了实验效率。 关键词:重力加速度;单片机;VC++ 0 引言 在力学实验中,通常测量重力加速度所用的重力加速度测量仪[1],是通过光电门得到物体的下降时间,并由数字毫秒计显示,通过设定不同的距离进行多次测量,然后按最小二乘法进行手工计算求得重力加速度值。其主要缺点是手工计算不方便,会引入计算误差,实验效率较低。 为了精确、有效地测量出重力加速度,设计了以上位PC机VC++程序作为主控制机,以AT89C51单片机作为辅助的重力加速度测量装置,所测时间以10μs 计,误差小,精度高,功耗低,比较适合物理实验用。 1 基本测量原理 物理上测量重力加速度的方法有很多,比如落体法、摆球法、液体测量法等等[2]。本文采用落体法测量重力加速度。基本原理如下: (1)根据自由落体运动,测下落的高度和时间.高度可由米尺测出。测量时间可用手表、秒表、打点计时、闪光照片、滴水法(自来水、滴定管)、光电门、单片机等。 (2)利用小球在保证初速度不变的情况下下落两个不同的高度,则有 , 。 是小球经过上光电门时的初速度。由上两式得:
(3)针对上个方案。采用多种数据处理,实验方案也不同,如多次测量、逐差法、作图法、最小二乘法等。 其结构简图如图1所示。开始时小刚球7被电磁铁6吸住,测量时断开电磁铁,使钢球以初速度为零下落,钢球依次通过二只光电管4和5,落到球座2中的球窝内,测量过程结束。 1—底座 2—球座 3—立柱及标尺 4—移动光 电管 5—固定光电管 6—电磁铁 7—小钢球 图1 测量装置简图 2 系统硬件电路及程序 2.1 硬件电路 本系统采用AT89C51芯片,完成从光电门接收数据,并把接收到的数据发送到PC机,而其他外围设备或芯片都起到辅助作用。AT89C51的最小系统电路图如图2中间部分所示,它由三部分组成:复位电路、时钟电路、中断指示电路[3]。复位电路和时钟电路都是使单片机正常工作所必须的电路,而对于指示灯电路是为了说明有外部中断信号。 AT89C51外部中断电路的作用是实现外部中断信号,也就是在遮光杆通过光电门时要单片机产生外部中断。
基于单片机自行车测速系统设计 摘要 随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。自行车的速度里程表能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程等物理量。本论文主要阐述一种基于霍尔元件的自行车的速度里程表的设计。以 AT89C52 单片机为核心,A44E 霍尔传感器测转数,实现对自行车里程/速度的测量统计,采用 24C02 实现在系统掉电的时候保存里程信息,并能将自行车的里程数及速度用LED实时显示。文章详细介绍了自行车的速度里程表的硬件电路和软件设计。硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。软件部分用汇编语言进行编程,采用模块化设计思想。该系统硬件电路简单,子程序具有通用性,完全符合设计要求。 关键词:里程/速度;霍尔元件;单片机;LED显示
Bike speed system design based on single chip ABSTRACT With the developing of people’s life, the bi cycle is not only the universal tool of transportation and substitute for walking, but becomes the first choice of entertainment and exercising. The bicycle mileage/speed can fulfill the basic need of people’s life, so that they can learn the speed and the mileage of the bicycle. In this paper, the bicycle mileage/speed design based on the Hall element is elaborated. By AT89C52 as kernel, using A44E Hall element to measure revolution, the measure and statistic are achieved. The range information is saved by 24C02 when the power is off, the bicycle speed can be displayed on LED. In this article, the hardware circuit and software design of bicycle mileage/speed instrument are introduced in detail. About the hardware, the pulse number is transmitted of one cycle of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. About the software, in assemble language; the program is designed in the mode of modules. The system has simple hardware, common sub-program, and meets the demand of design. . Keyword:Mileage / speed; Hall element; Single chip microcomputer; LED
压 电 式 加 速 度 测 试 系 统 姓名:张书峰 学号:201003140125 学院:机电学院 班级:机自101 指导教师:王玮
一设计概论 压电传感器是一种可逆性传感器,既可以将机械能转换为电能,又可以将机械能转换为电能。它是利用某些物质(如石英、钛酸钡或压电陶瓷、高分子材料等)的压电效应来工作的。在外力作用下,在电介质表面产生电荷,从而实现非电量测量的目的。因此是一种典型的自发电式传感器。压电传感器是力敏感元件,它可以测量最终能变换为力的那些非电物理量,例如,动态力、动态压力、振动加速度等 现有测试系统的各个组成部分常常以信息流的过程来划分。一般可以分为:信息的获得,信息的转换,信息的显示、信息的处理。作为一个完整的非电量电测系统,也包括了信息的获得、转换、显示和处理等几个部分。因为它首先要获得被测量的信息,把它变换成电量,然后通过信息的转换,把获得的信息变换、放大,再用指示仪或记录仪将信息显示出来,有的还需要把信息加以处理。因此非电量电测系统,具体来说,一般包括传感器(信息的获得)、测量电路(信息的转换)、放大器、指示器、记录仪(信息的显示)等几部分有时还有数据处理仪器(信息的处理)。它们间的 关系可 用右框 图来表 示。 其中传感器是一个把被测的非电物理变换成电量的装置,因此是一种获得信息的手段,它在非电量电测系统中占有重要的位 置。它获得信息 的正确与否,直 接影响到整个 测量系统的测 量效果。测量电 路的作用是把 传感器的输出
变量变成易于处理的电压或电流信号,使信号能在指示仪上显示或在记录仪中记录。测量电路的种类由传感器的类型而定。压电加速度传感器常用的测量电路是电荷放大器。常用的压电加速度传感器的动态测量系统如图1.2 二整体设计方案 1、测量的示意图 2、设计的原理 压电式加速度传感器属于惯性式传感器,工作原理是以某些物质的压电效应为基础,在加速度计受振时,加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比,可以把被测的非电物理量加速度转化为电量。由于压电式传感器的输出电信号是微弱的电荷,而且传感器本身有很大内阻,故输出能量甚微,这给后接电路带来一定困难。为此,通常器信号选用电荷放大器作为电信号的测量电路。 3、方框图
HEFEI UNIVERSITY OF TECHNOLOGY 《传感器原理及应用》课程 考核论文 题目压电式加速度传感器班级机设七班 学号 20111488 姓名孙国强 成绩 机械与汽车工程学院机械电子工程系 二零一四年五月
压电式加速度传感器 摘要:现代工业和自动化生产过程中,非电物理量的测量和控制技术会涉及大量的动 态测试问题。所谓动态测试是指量的瞬时值以及它随时间而变化的值的确定,即被测量为变量的连续测量过程。振动与冲击测量的核心是传感器,常用压电加速度传感器来获取冲击和振动信号。压电式传感器是基于某些介质材料的压电效应,当材料受力作用而变形时,其表面会有电荷产生,从而实现非电量测量。其中,压电式加速度传感器是以压电材料为转换元件,将加速度输入转化成与之成正比的电荷或电压输出的装置,具有结构简单、重量轻、体积小、耐高温、固有频率高、输出线性好、测量的动态范围大、安装简单的特点。 一、传感器物理效应及工作原理 压电效应:某些材料在受力时所产生的电极化现象。正压电效应:某些电介质在受到某一方向的机械力而变形时,在一定表面上产生电荷,若外力变向,电荷极性随之而变;当撤除外力后,又重新回到不带电状态。逆压电效应:当在电介质的极化方向施加电场,电场力使其在一定方向上产生机械变形或机械应力;当撤除外加电场时,变形或应力随之消失,又称电致伸缩效应。 压电材料:石英晶体是目前广泛应用成本较低的人造石英晶体,有很大的机械强度和稳定的机械性能,温度稳定性好,但灵敏度低,介电常数小,因此逐渐被其他压电材料所代替,至今石英仍是最重要的也是用量最大的振荡器、谐振器和窄带滤波器等元件的压电材料。除此之外,压电陶瓷有较高的压电系数和介电常数,灵敏度高,但机械强度不如石英晶体好。 压电式加速度传感器又称为压电加速度计,它是典型的有源传感器,利用某些物质如石英晶体、人造压电陶瓷的压电效应,在加速度计受振时,质量块加在压电元件上的力也随之变化。压电敏感元件是力敏元件,在外力作用下,压电敏感元件的表面上产生电荷,从而实现非电量电测量的目的。 压电加速度传感器的原理框图如图1所示,原理如图2所示。
重力加速度的测量及应用 重力加速度g值的准确测定对于计量学、精密物理计量、地球物理学、地震预报、重力探矿和空间科学等都具有重要意义。 测量: 最早测定重力加速度的是伽利略。约在1590年,他利用倾角为θ的斜面将g的测定改为测定微小加速度a=gsinθ,。1784年,G?阿特武德将质量同为M的重物用绳连接后,挂在光滑的轻质滑轮上,再在另一个重物上附加一重量小得多的重物m,使其产生一微小加速度a =mg/(2M+m),测得a后,即可算出g。 1888年,法国军事测绘局使用新的方法进行了g值的计量.它的原理简述为:若一个物体如单摆那样以相同的周期绕两个中心摆动,则两个中心之间的距离等于与上述周期相同的单摆的长度。当时的计量结果为:g=9.80991m/s2。 1906年,德国的库能和福脱万勒用相同的方法在波茨坦作了g值的计量,作为国际重力网的参考点,即称为“波茨坦重力系统”的起点,其结果为g(波茨坦)=9.81274m/s2。 根据波茨坦得到的g值可以通过相对重力仪来求得其他地点与它的差值,从而得出地球上各地的g值,这样建立起来的一系列g值就称为波茨坦重力系统。国际计量局在1968年10月的会议上推荐,自1969年1月1日起,g(波茨坦)减小到9.81260m/s2。根据上述修正了的波茨坦系统,在地球上的一级点位置的g值的不确定度可小于5×10-7。 应用: 地球对表面物体具有吸引力,重力加速度是度量地球重力大小的物理量。按照万有引力定律,地球各处的重力加速度应该相等。但是由于地球的自转和地球形状的不规则,造成各处的重力加速度有所差异,与海拔高度、纬度以及地壳成分、地幔深度密切相关。 重力预震:地球物理学研究中要求观测重力长期的细微的变化,即所谓g的长度;这种变化可能是由于地壳运动,地球的内部结构和形状的演变,太阳系中动力常数的长度以及引力常数G的变化等等。观测这些变化要求g值的计量不确定度达10-8至10-9量级。观测g值的变化可能对预报地震有密切的关系.据有关方面报道,七级地震相对应的g值变化约为0.1×10-5m/s2。目前,许多国家都在探索用g值的变化作临震预报。 重力探矿:利用地下岩石和矿体密度的不同而引起地面重力加速度的相应的变化。故根据在地面上或海上测定g的变化,就可以间接地了解地下密度与周围岩石不同的地质构造、矿体和岩体埋藏情况,圈定它们的位置。所用的仪器是重力仪和扭秤(目前已为高精度重力仪所代替)。
届.别. 2013届 学号 毕业设计 基于单片机设计的自行车测速系统 姓名 系别、专业 导师姓名、职称 完成时间 1
目录 摘要 .............................................................. 3矚慫润厲钐瘗睞枥庑赖。Abstract............................................................ 3聞創沟燴鐺險爱氇谴净。 1 绪论 ........................................................... 4残骛楼諍锩瀨濟溆塹籟。 1.1 课题背景 ................................................. 5酽锕极額閉镇桧猪訣锥。 1.2 课题主要任务及内容........................................ 5彈贸摄尔霁毙攬砖卤庑。 1.3 任务分析与实现............................................ 5謀荞抟箧飆鐸怼类蒋薔。 2 系统设计 ....................................................... 6厦礴恳蹒骈時盡继價骚。 2.1 硬件方案设计.............................................. 6茕桢广鳓鯡选块网羈泪。 2.2 软件方案设计.............................................. 7鹅娅尽損鹌惨歷茏鴛賴。 2.3 硬件电路设计.............................................. 8籟丛妈羥为贍偾蛏练淨。 2.3.1 概述................................................ 8預頌圣鉉儐歲龈讶骅籴。 2.3.2 系统总电路图......................................... 9渗釤呛俨匀谔鱉调硯錦。 2.3.3 单片机简介.......................................... 9铙誅卧泻噦圣骋贶頂廡。 2.3.4 单片机的引脚功能介绍............................... 10擁締凤袜备訊顎轮烂蔷。 2.3.5 单片机中断系统介绍................................. 10贓熱俣阃歲匱阊邺镓騷。 2.3.6 传感器及其测量系统................................. 11坛摶乡囂忏蒌鍥铃氈淚。 2.3.7 霍尔传感器的测温原理............................... 11蜡變黲癟報伥铉锚鈰赘。 2.3.8 集成开关型霍尔传感器............................... 12買鲷鴯譖昙膚遙闫撷凄。 2.4 单片机外围电路的设计......................................... 13綾镝鯛駕櫬鹕踪韦辚糴。 2.4.1 时钟电路的设计......................................... 13驅踬髏彦浃绥譎饴憂锦。 2.4.2 复位电路的设计......................................... 14猫虿驢绘燈鮒诛髅貺庑。 2.4.3 显示电路的设计......................................... 15锹籁饗迳琐筆襖鸥娅薔。 3 软件程序设计 .................................................. 16構氽頑黉碩饨荠龈话骛。 3.1 概述 ..................................................... 16輒峄陽檉簖疖網儂號泶。 3.2 总体程序设计............................................. 16尧侧閆繭絳闕绚勵蜆贅。 3.3 中断子程序设计........................................... 18识饒鎂錕缢灩筧嚌俨淒。结论 ............................................................ 19凍鈹鋨劳臘锴痫婦胫籴。参考文献 ......................................................... 20恥諤銪灭萦欢煬鞏鹜錦。致谢 ............................................................. 20鯊腎鑰诎褳鉀沩懼統庫。附件一:总体原理图设计............................................ 21硕癘鄴颃诌攆檸攜驤蔹。
定义 中文名称:加速度传感器 英文名称:acceleration transducer 定义:能感受加速度并转换成可用输出信号的传感器 应用学科:机械工程(一级学科);传感器(二级学科);物理量传感器(三级学科)。 加速度传感器是一种能够测量加速力的电子设备。加速力就是当物体在加速过程中作用在物体上的力,就好比地球引力,也就是重力。加速力可以是个常量。加速度计有两种:一种是角加速度计,是由陀螺仪(角速度传感器)改进的。另一种就是线加速度计。[1] 2分类 压电式 压电式加速度传感器又称压电加速度计。它也属于惯性式传感器。压电式加速度传感器的原理是利用压电陶瓷或石英晶体的压电效应,在加速度计受振时,质量块加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比。 压阻式 基于世界领先的MEMS硅微加工技术,压阻式加速度传感器具有体积小、低功耗等特点,易于集成在各种模拟和数字电路中,广泛应用于汽车碰撞实验、测试仪器、设备振动监测等领域。加速度传感器网为客户提供压阻式加速度传感器/压阻加速度计各品牌的型号、参数、原理、价格、接线图等信息。 电容式 电容式加速度传感器是基于电容原理的极距变化型的电容传感器。电容式加速度传感器/电容式加速度计是对比较通用的加速度传感器。在某些领域无可替代,如安全气囊,手机移动设备等。电容式加速度传感器/电容式加速度计采用了微机电系统(MEMS)工艺,在大量生产时变得经济,从而保证了较低的成本。 伺服式
伺服式加速度传感器是一种闭环测试系统,具有动态性能好、动态范围大和线性度好等特点。其工作原理,传感器的振动系统由"m-k”系统组成,与一般加速度计相同,但质量m上还接着一个电磁线圈,当基座上有加速度输入时,质量块偏离平衡位置,该位移大小由位移传感器检测出来,经伺服放大器放大后转换为电流输出,该电流流过电磁线圈,在永久磁铁的磁场中产生电磁恢复力,力图使质量块保持在仪表壳体中原来的平衡位置上,所以伺服加速度传感器在闭环状态下工作。由于有反馈作用,增强了抗干扰的能力,提高测量精度,扩大了测量范围,伺服加速度测量技术广泛地应用于惯性导航和惯性制导系统中,在高精度的振动测量和标定中也有应用。 线加速度计的原理是惯性原理,也就是力的平衡,A(加速度)=F(惯性力)/M(质量) 我们只需要测量F就可以了。怎么测量F?用电磁力去平衡这个力就可以了。就可以得到F对应于电流的关系。只需要用实验去标定这个比例系数就行了。当然中间的信号传输、放大、滤波就是电路的事了。 多数加速度传感器是根据压电效应的原理来工作的。 所谓的压电效应就是"对于不存在对称中心的异极晶体加在晶体上的外力除了使晶体发生形变以外,还将改变晶体的极化状态,在晶体内部建立电场,这种由于机械力作用使介质发生极化的现象称为正压电效应"。 一般加速度传感器就是利用了其内部的由于加速度造成的晶体变形这个特性。由于这个变形会产生电压,只要计算出产生电压和所施加的加速度之间的关系,就可以将加速度转化成电压输出。当然,还有很多其它方法来制作加速度传感器,比如压阻技术,电容效应,热气泡效应,光效应,但是其最基本的原理都是由于加速度产生某个介质产生变形,通过测量其变形量并用相关电路转化成电压输出。每种技术都有各自的机会和问题。 压阻式加速度传感器由于在汽车工业中的广泛应用而发展最快。由于安全性越来越成为汽车制造商的卖点,这种附加系统也越来越多。压阻式加速度传感器2000年的市场规模约为4.2亿美元,根据有关调查,预计其市值将按年平均4.1%速度增长,至2007年达到5.6亿美元。这其中,欧洲市场的速度最快,因为欧洲是许多安全气囊和汽车生产企业的所在地。 压电技术主要在工业上用来防止机器故障,使用这种传感器可以检测机器潜在的故障以达到自保护,及避免对工人产生意外伤害,这种传感器具有用户,尤其是质量行业的用户所追求的可重复性、稳定性和自生性。但是在许多新的应用领域,很多用户尚无使用这类传感器的意识,销售商冒险进入这种尚待开发的市场会麻烦多多,因为终端用户对由于使用这种传感器而带来的问题和解决方法都认识不多。如果这些问题能够得到解决,将会促进压电传感器得到更快的发展。2002年压电传感器市值为3亿美元,预计其年增长率将达到4.9%,到2007年达到4.2亿美元。 使用加速度传感器有时会碰到低频场合测量时输出信号出现失真的情况,用多种测量判断方法一时找不出故障出现的原因,经过分析总结,导致测量结果失真的因素主要是:系统低频响应差,系统低频信噪比差,外界环境对测量信号的影响。所以,只要出现加速度传感器低频测量信号失真情况,对比以上三点看看是哪个因素造成的,有针对性的进行解决[5]。
重力加速度测量(设计性实验) 【实验目的】 (1)推导单摆测量重力加速度的公式。 (2)掌握单摆测量重力加速度实验的实验设计方法及验证方法。 (3)掌握间接测量量不确定度的计算方法。 (4)了解单摆测量重力加速度实验的主要误差来源。 (5)估算实验仪器的选取参数并设计实验数据记录表格。 【设计实验】 设计性实验的设计过程主要有以下几步: (1)根据待测的物理量确定出实验方法(理论依据),推导出测量的数学公式;判定方法误差给测量结果带来的影响。 (2)根据实验方法及误差设计要求,分析误差来源,确定所需要采用的测量仪器(包括量程、精度等)以及测量环境应达到的要求(如空气、电磁、振动、温度、海拔高度等)。 (3)确定实验步骤、需要测量的物理量、测量的重复次数等。 (4)设计实验数据表格及要计算的物理量。 (5)实验验证。要用测得的实验数据,采用误差理论来验证实验结果。若不符合测量要求,则需对上述步骤中的有关参数做出适当调整并重做实验,据测得的实验数据进行实验验证,以此类推直到符合要求为止。 设计实验的原则应在满足设计要求的前提下,尽可能选用简单、精度低的仪器,并能降低对测量环境的要求,尽量减少实验测量次数。 【设计要求】 (1)测定本地区的重力加速度,要求重力加速度的相对不确度小于0.5%,即 g 0.5u g ≤%。确 定所需仪器的量程和精度,以及测量参数(摆长和摆动次数)。 (2)本实验是测量重力加速度的设计性实验,但考虑到设计难度、仪器资源的限制等因素,规定其实验方法采用单摆法。 (3)可用仪器有:钢卷尺(1 mm/2 m ,表示最小分度值为1 mm ,量程为2 m ,下同)、钢直尺(1 mm/1 m )、游标卡尺(0.02 mm/20 cm )、普通直尺(1 mm/20 cm )、电子秒表(0.01 s )、单摆实验仪(含摆线、摆球等)。 【实验内容】 (1)原理分析。写出单摆法测量公式完整的推导过程及近似要求,并画出原理图(查阅相关书籍及网站)。 (2)误差分析。分析实验过程中的主要误差来源并估算。 (3)不确定度的推导与计算。 (4)估算实验参数(摆长和摆动次数)。 (5)设计实验步骤与数据表格。 (6)实验与验证。 【设计提示】
传感器原理及其应用 右图是激光测量机器人,利用两 个激光位移传感器进行板材厚度测量 的。 由于生产车间的板材不能无间 隙的且较水平的放在工作台上,那么 若直接测量的话误差较大,若采用两 个激光位移传感器进行测量时,可实 时精确测量板材厚度。按照操作手册 对两个传感器主从站的分布,将测量 结果发送给PLC,那么PLC就很容易 计算出板材厚度的结果。例如:两个 传感器测量的结果分别为A、B,两个 传感器之间距离为S,那么板材厚度 W=S-(A+B)。 本文主要对激光位移传感器及压 电式加速度传感器进行介绍。 激光位移传感器 激光位移传感器能够利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量。激光位移传感器(磁致伸缩位移传感器)就是利用激光的这些优点制成的新型测量仪表,它的出现,使位移测量的精度、可靠性得到极大的提高,也为非接触位移测量提供了有效的测量方法。 激光位移传感器因其较高的测量精度和非接触测量特性,广泛应用于高校和研究机构、汽车工业、机械制造工业、航空与军事工业、冶金和材料工业的精密测量检测。激光位移传感器可精确非接触测量被测物体的位置、位移等变化,主要应用于检测物的位移、厚度、振动、距离、直径等几何量的测量。按照测量原理,激光位移传感器原理分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量,下面分别介绍激光位移传感器的两种测量原理。 一.激光位移传感器的测量原理 激光三角法测量原理
图1 激光三角法测量原理图 半导体激光器1被镜片2聚焦到被测物体6。反射光被镜片3收集,投射到CCD阵列4上;信号处理器5通过三角函数计算阵列4上的光点位置得到距物体的距离。 激光发射器通过镜头将可见红色激光射向物体表面,经物体反射的激光通过接受器镜头,被内部的CCD线性相机接受,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度即知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物之间的距离。由传感器探头(发光LED)发射出的一束670nm激光,通过特殊的多重透镜被汇聚成一个直径极小的光束,此光束被测量表面漫反射到一个分辨率极高的CCD/PSD/CMOS探测器上,通过CCD/PSD/CMOS所感应到光束位置的不同,可精确测量被测物体位置的变化。 同时,光束在接收元件的位置通过模拟和数字电路处理,并通过微处理器分析,计算出相应的输出值,并在用户设定的模拟量窗口内,按比例输出标准数据信号。如果使用开关量输出,则在设定的窗口内导通,窗口之外截止。另外,模拟量与开关量输出可设置独立检测窗口。 激光回波分析法测量原理 激光位移传感器采用回波分析原理来测量距离可以达到一定程度的精度。传感器内部是由处理器单元、回波处理单元、激光发射器、激光接受器等部分组成。激光位移传感器通过激光发射器每秒发射一百万个脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回接收器所需时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均输出。
自由落体重力加速度测量仪/重力加速度测量仪型号:HAD-LG-2 利用自由落体(条形物体)测定重力加速度,比球体测量准确.方便.配有数字毫秒计,五位半数显. 自由落体实验仪 1 自由落体重力加速度测量仪概述 自由落体实验仪是基础力学教学实验的必备仪器,利用自由落体实验仪可进行定性观测和定量研究物体在自由落体状态下的运动规律。从而达到教学演示实验的目的。 HAD-LG-2型为:主体高度1.6m,铸铁腿三脚支架,底座稳固,抗震动好,利于实验室摆放操作。 从教学使用出发,HAD-LG-1型为:主体高度1.2m,便携式三脚支架,底座轻巧,便于移动,利于课堂演示教学。 以上两种自由落体实验仪均可与J0201-G-2型计时器, J0201-CC存贮式计时器,J0201-CHJ存贮式数字毫秒计,J0416-2型多用大屏幕数字显示测试仪配合使用,适用于中学进行物理教学的演示实验或分组实验。 本仪器还可以与J02015-2型简易频闪光源和照相机同步配合使用,用频闪照像法研究自由落体运动的规律。 2 重力加速度测量仪技术性能 2.1 仪器总高: HAD-LG-1型≥1.2m ;HAD-LG-2型≥1.6m 2.2 实验有效高度: HAD-LG-1型≥1.0m ;xe77FT-LG-2型≥1.4m 2.3 电磁铁电源: DC6V 2.4 钢球直径: 18mm 2.5 g值实验相对误差:≤ 2% 3 结构与特点 3.1 见图一。仪器由带有标尺的铝合金型材为主体,顶端装有电磁铁吸球器,中间装有两个可任意移动的光电门光电传感器,下端装有接球架网,立柱下端固定在可调节的三脚支架上。 3.2 钢球的起始位置由电磁铁的固定支架端板的下端“ ”形的下边沿作为位置指针,能方便地调节确定钢球自由下落的起始刻度基准。 3.3 立柱上端装有电磁铁吸球器,当电磁铁线圈接通直流6V电源时,电磁铁吸住钢球,切断电源时,钢球下落作自由落体运动。电磁铁的支架上还装有两个接线柱,可以与频闪光源的同步输入开关及学生实验电源直流6V相连接用于频闪照相实验用。(注:原接电缆的接线端子可卸下不用) 3.4 两个光电门由小型聚光电珠和光敏接收管组成。两个光电门可以上下任意移动,在立柱上的位置由光电门支架的凹型槽底边所对标尺的刻度决定。
中国石油大学(华东)现代远程教育 实验报告 课程名称:大学物理() 实验名 称: 速度、加速度的测定和牛顿运动定律的验证 实验形式:在线模拟+现场实践 提交形式:提交书面实验报告 学生姓学号: 年级专业层次:高起专 学习中心:________ 提交时间:2016 年6 月15 日
、实验目的 1.了解气垫导轨的构造和性能,熟悉气垫导轨的调节和使用方法。 2?了解光电计时系统的基本工作原理,学会用光电计时系统测量短暂时间的方法。 3.掌握在气垫导轨上测定速度、加速度的原理和方法。 4?从实验上验证F=ma的关系式,加深对牛顿第二定律的理解。 5?掌握验证物理规律的基本实验方法。 二、实验原理 1速度的测量 一个作直线运动的物体,如果在t~t+ △时间内通过的位移为\x x~x+ Ax ,则该物体在 1F =—— At时间内的平均速度为亠,△越小,平均速度就越接近于t时刻的实际速度。当 A t T 时,平均速度的极限值就是t时刻(或x位置)的瞬时速度 ir = lim ------------------——— (1) 实际测量中,计时装置不可能记下 A t T0勺时间来,因而直接用式(1)测量某点的速 度就难以实现。但在一定误差范围内,只要取很小的位移Ax测量对应时间间隔At就可 以用平均速度订近似代替t时刻到达x点的瞬时速度r。本实验中取Ax为定值(约10mm ), 用光电计时系统测出通过Ax所需的极短时间A,较好地解决了瞬时速度的测量问题。 2.加速度的测量 在气垫导轨上相距一定距离S的两个位置处各放置一个光电门,分别测出滑块经过这两 个位置时的速度v1和v2。对于匀加速直线运动问题,通过加速度、速度、位移及运动时间之间的关系,就可以实现加速度a的测量。 (1)由■- "-+■-测量加速度 在气垫导轨上滑块运动经过相隔一定距离的两个光电门时的速度分别为v1和v2,经过 两个光电门之间的时间为t21,则加速度a为 (2) (2)根据式(2)即可计算出滑块的加速度。 (3)由厂测量加速度 设v1和v2为滑块经过两个光电门的速度,S是两个光电门之间距离,则加速度a为 根据式(3)也可以计算出作匀加速直线运动滑块的加速度。
压电式加速度传感器 及其应用
压电式加速度传感器及其应用 一、 压电式加速度传感器原理 压电式加速度传感器又称压电加速度计。它也属于惯性式传感器。它是利用某些物质如石英晶体的压电效应,在加速度计受振时,质量块加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比。 由于压电式传感器的输出电信号是微弱的电荷,而且传感器本身有很大内阻,故输出能量甚微,这给后接电路带来一定困难。 为此,通常把传感器信号先输到高输入阻抗的前置放大器。经过阻抗变换以后,方可用于一般的放大、检测电路将信号输给指示 仪表或记录器。 二、压电式加速度传感器构成元件 常用的压电式加速度计的结构形式如图所示,是由预压弹簧,质量块,基座,压电元件和外壳组成。图中为环形剪切型,结构简单,能做成极小型、高共振频率的加速度计,环形质量块粘到装在中心支柱上的环形压电元件上。由于粘结剂会随温度增高而变软,因此最高工作温度受到限制。 预压弹簧压电元件外壳质量 块基座
三、压电式加速度传感器幅频特性 图1 压电式加速度计的幅频特性曲线 加速度 限频率取决于幅频曲线中的共振频率图(图1)。一般小阻尼(z<=0.1)的加速度计,上限频率若取为共振频率的 1/3,便可保证幅值误差低于1dB(即12%);若取为共振频率的1/5,则可保证幅值误差小于0.5dB(即6%),相移小于30。但共振频率与加速度计的固定状况有关,加速度计出厂时给出的幅频曲线是在刚性连接的固定情况下得到的。实际使用的固定方法往往难于达到刚性连接,因而共振频率和使用上限频率都会有所下降。 四、压电式加速度传感器的灵敏度 压电式加速度计的灵敏度压电加速度计属发电型传感器,可把它看成电压源或电荷源,故灵敏度有电压灵敏度和电荷灵敏度两种表示方法。前者是加速度计输出电压(mV)与所承受加速度之比;后者是加速度计输出电荷与所承受加速度之比。加速度单位为m/s2,但在振动测量中往往用标准重力加速度g作单位,1g= 9.80665m/s2。对给定的压电材料而言,灵敏度随质量块的增大或压电元件的增多而增大。一般来说,加速度计尺寸越大,其固有频率越低。因此
摘要 随着居民生活水平的不断提高,人们对于生活质量的要求也日益增加,尤其是对健身的要求。自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。自行车的速度里程表能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程等物理量。而对于自行车运动员来说,最为关心的莫过于一段时间内的训练效果。因为教练要根据一段时间内运动员的训练效果进行评估,从而进行适当的调整已使运动员达到最佳的状态。因此爱好自行车运动的人十分学要一款能测速的装置,以知道自己的运动情况。并根据外界条件,如温度,风速等进行适当的调节,已达到最佳运动的效果。 关键词:单片机、LED显示、里程/速度、霍尔元件
第一章系统总方案分析与设计 1.1 课题主要任务及内容 本课题主要任务是利用霍尔元件、单片机等部件设计一个可用LED数码管实时显示里程和速度的自行车的速度里程表。本文主要介绍了自行车的速度里程表的设计思想、电路原理、方案论证以及元件的选择等内容,整体上分为硬件部分设计和软件部分设计。 本文首先扼要对该课题的任务进行方案论证,包括硬件方案和软件方案的设计;继而具体介绍了自行车的速度里程表的硬件设计,包括传感器的选择、单片机的选择、显示电路的设计;然后阐述了该自行车的速度里程表的软件设计,包括数据处理子程序的设计、显示子程序的设计;最后对本次设计进行了系统的总结。 具体的硬件电路包括AT89C52单片机、霍尔元件以及LED显示电路等。 软件设计包括:中断子程序设计,里程计算子程序设计,显示子程序设计。软件采用汇编语言编写,软件设计的思想主要是自顶向下,模块化设计,各个子模块逐一设计。 1.2 任务分析与实现 本设计的任务是:以通用AT89C52单片机为处理核心,用传感器将车轮的转数转换为电脉冲,进行处理后送入单片机。里程及速度的测量,是经过AT89C52的定时/计数器测出总的脉冲数和每转一圈的时间,再经过单片机的计算得出,其结果通过LED显示器显示出来。 本系统总体思路如下:假定轮圈的周长为L,在轮圈上安装m个永久磁铁,则测得的里程值最大误差为L/m。经综合分析,本设计中取m=1。当轮子每转一圈,通过开关型霍尔元件传感器采集到一个脉冲信号,并从引脚P3.2中断0端输入,传感器每获取一个脉冲信号即对系统提供一次计数中断。每次中断代表车轮转动一圈,中断数n和周长L的乘积为里程值。计数器T1计算每转一圈所用的时间t,就可以计算出即时速度v。当里程键按下时,里程指示灯亮,LED切换显示当前里程;当速度键按下时,速度指示灯亮,LED切换显示当前速度。 要求达到的各项指标及实现方法如下: 1. 利用霍尔传感器产生里程数的脉冲信号。 2. 对脉冲信号进行计数。 实现:利用单片机自带的计数器T1对霍尔传感器脉冲信号进行计数。 3. 对数据进行处理,要求用LED显示里程总数和即时速度。 实现:利用软件编程,对数据进行处理得到需要的数值。 最终实现目标:自行车的速度里程表具有里程、速度测试与显示功能,采用单片机作控制,显示电路可显示里程及速度。
用凯特摆测量重力加速度 实验目的:学习凯特摆的实验设计思想和技巧,掌握一种比较精确的测量重力加速度的方法。 实验原理:1、当摆幅很小时,刚体绕O轴摆动的周期: 刚体质量m,重心G到转轴O的距离h,绕O轴的转动惯量I,复 摆绕通过重心G的转轴的转动惯量为I G 。 当G轴与O轴平行时,有I=I G+mh2 ∴ ∴复摆的等效摆长l=( I G+mh2 )/mh 2、利用复摆的共轭性:在复摆重心G旁,存在两点O和O′,可使 该摆以O为悬点的摆动周期T?与以O′为悬点的摆动周期T?相同, 可证得|OO′|=l,可精确求得l。 3、对于凯特摆,两刀口间距就是l,可通过调节A、B、C、D四摆 锤得位置使正、倒悬挂时得摆动周期T?≈T?。 ∴4π2/g=(T?2+T?2)/2l + (T?2-T?2)/2(2h?-l) = a + b 实验仪器:凯特摆、光电探头、米尺、数字测试仪。 实验内容:1、仪器调节 选定两刀口间得距离即该摆得等效摆长l,使两刀口相对摆杆基本 对称,并相互平行,用米尺测出l的值,粗略估算T值。 将摆杆悬挂到支架上水平的V形刀承上,调节底座上的螺丝,借 助于铅垂线,使摆杆能在铅垂面内自由摆动,倒挂也如此。 将光电探头放在摆杆下方,让摆针在摆动时经过光电探测器。
让摆杆作小角度摆动,待稳定后,按下reset钮,则测试仪开始 自动记录一个周期的时间。 2、测量摆动周期T?和T? 调整四个摆锤的位置,使T?和T?逐渐靠近,差值小于0.001s, 测量正、倒摆动10个周期的时间10T?和10T?各测5次取平均 值。 3、计算重力加速度g及其标准误差σg 。 将摆杆从刀承上取下,平放在刀口上,使其平衡,平衡点即重心G。 测出|GO|即h?,代入公式计算g。 推导误差传递公式计算σg 。 实验数据处理:1、l的值 l=?(l?+l?+l?)=74.17cm σ=0.03055cm,u A =σ/=0.01764cm, ∴ΔA =t P?u A =1.32*0.01764=0.02328cm u B=ΔB /C=0.1/3=0.03333cm ∴u L ==0.04066cm T e ==1.729s 2、T?和T?的值 T?=1.72746s σ=2.525*10ˉ?s,u A =σ/=1.129*10ˉ?s ∴ΔA =t P?u A =1.14*0.0001129=1.287*10ˉ?s u B=ΔB /C=0.0001/3=0.3333*10ˉ?s ∴u T1 ==1.329*10ˉ?s
嵌入式系统设计
自行车车速报警系统 摘要 本课题实验主要是利用STC89C52RC、12864液晶、24C02E^2PROM、霍尔传感器和加速度倾角传感器来实现自行车测速功能。通过霍尔传感器来采集信号,经过单片机处理后,由12864液晶显示其总里程,分里程,速度,加速度;信号经过加速度倾角传感器读出坡度值,并在12864液晶中显示出来;然后由数学公式计算出消耗的卡路里值。12864显示页面一共有三面。按键具有调控展现的页面,清除分里程数据,保存总里程数据的功能,利用24C02实现断电不消失的功能。发光二极管模块,利用MOS管的特性可以实现在暗处自动点亮。 关键词:自行车测速仪;霍尔传感器A3144;加速度倾角传感器MMA7455;12864LCD 目录 1设计要求................................ 2设计方案................................ 2.1 芯片的选择............................... 2.2 霍尔传感器与单片机的通信.............. 2.3 12864液晶屏与单片机.................. 2.4 单片机与24C02 ........................ 2.5 单片机与MMA7455 ...................... 2.6 单片机下载程序........................ 3总体方案................................ 3.1工作原理............................. 3.2总体设计............................. 4系统硬件设计............................