§6.2 光源
6.2.1 半导体光源的种类
电流注入型半导体p-n结光发射器件按照其发光特性划分,可分为激光器(LD),发光二极管(LED),和超辐射发光二极管(SLD)三类。LD中建立起了光振荡,发射出的是相干光;LED的发光是基于有源区的自发辐射,辐射光为非相干光;而在SLD 中存在光增益,但无光反馈(理想情况下),其发射出的光为弱相干光。
光纤陀螺(FOG)用光源必须满足以下几个条件:(1)能提供足够大的光功率,光功率大可以提高系统的信噪比。(2)光的相干长度要短,即具有宽的发射光谱,它可以降低瑞利后向散射、偏振交叉耦合和克尔效应等引起的相干误差。(3)具有好的平均波长稳定性以保证光纤陀螺标度因子的线性度。(4)高可靠性。
LD具有输出功率大(单模尾纤输出功率可达几百毫瓦),工作电流低等优点,但其光谱宽度FWHM(光谱曲线上光强为最大光强一半的两个波长间的光谱全宽)一般小于5nm,具有较长的相干长度。1982年,R.A.Bergh等人把多模激光器作为光纤陀螺的光源,使当时的光纤陀螺系统的性能有了明显改善,但随着高性能宽谱光源的出现,目前已基本上不采用LD作为光纤陀螺的光源。LED具有光谱宽(850nm波段的GaAlAs/GaAs LED的光谱宽度约为30-40nm,1300nm和1550nm的InGaAsP/InP LED 光谱宽度分别约为70~80nm和90~110nm)、光谱调制度极低、工作温度范围宽、高温可靠性好、价格低等优点,但LED的光输出功率低,一般在100mA工作电流下,单模尾纤输出功率只有数十微瓦,不适合作为中、高精度陀螺的光源。SLD由于具有较宽的光谱(FWHM>20nm),光谱调制度一般小于10%,有的器件低达0.1%,其光输出功率可以与普通LD相比,而远大于LED;光束发散也与LD相近而窄于LED,易于与单模光纤耦合,单模尾纤输出功率可达mW量级,因而它是光纤陀螺的理想光源。
Kurbtov等人1971年首先研究了SLD。T.P.Lee等人在1973年报道了SLD的初期研究工作,对SLD的稳态特性作了详细的评述。B?hm等人在1981年首先报道了SLD 在光纤陀螺中的应用,使光纤陀螺的性能得到明显改善。此后对SLD的研究非常广泛,提出了各种抑制光反射的结构,使光谱特性得到很大改善。在SLD发展的前期,有源区大多采用体材料,随着量子阱材料的研究进展和超精细薄层材料生长技术的发展,大功率SLD的有源区越来越多地采用量子阱结构(有源层材料的阱层厚度薄到足以与电子的德布罗意波长~50nm相比拟)。由于在量子阱结构中态密度呈阶梯状分布而导致量子尺寸效应,它可以获得比体材料更高的光增益和光输出功率。
目前LD的室温连续工作寿命已超过10万小时,LED和SLD的室温连续工作外推寿命已达100万小时。
6.2.2半导体光源工作原理
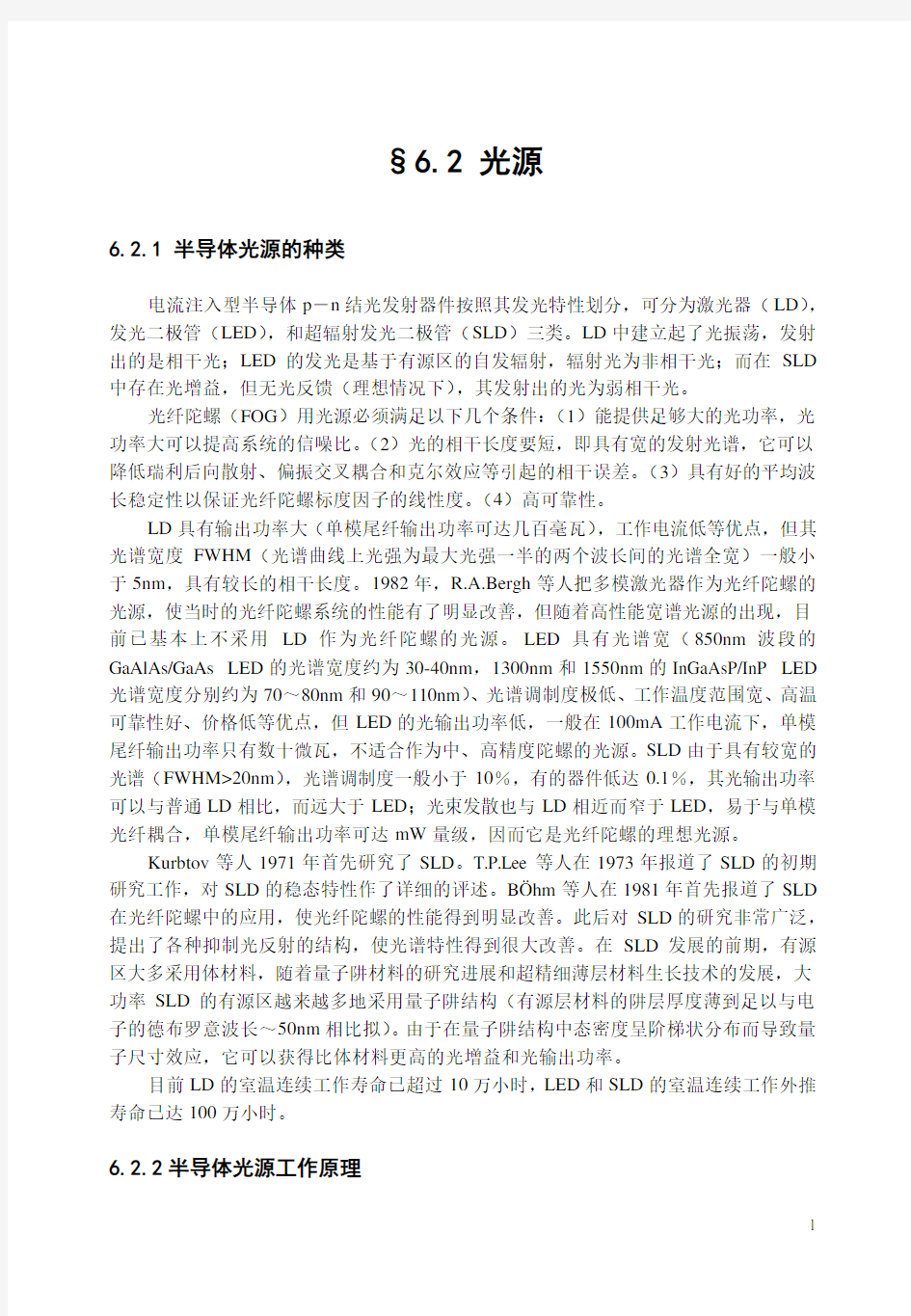
图6.2-3 LD 芯片基本结构示意图 1. 半导体中的光发射和光吸收
1.1 光的自发辐射
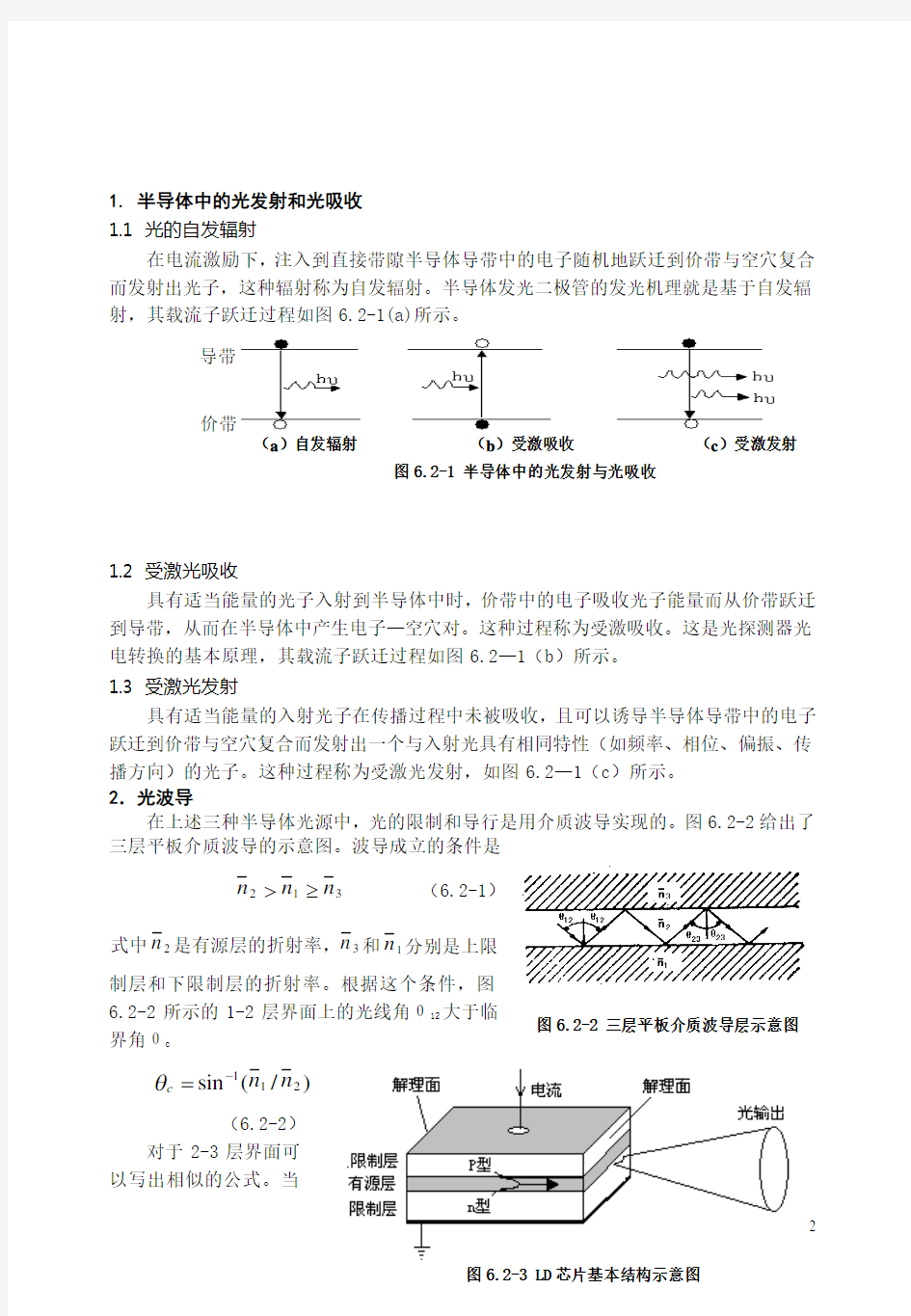
在电流激励下,注入到直接带隙半导体导带中的电子随机地跃迁到价带与空穴复合而发射出光子,这种辐射称为自发辐射。半导体发光二极管的发光机理就是基于自发辐射,其载流子跃迁过程如图6.2-1(a)所示。
1.2 受激光吸收
具有适当能量的光子入射到半导体中时,价带中的电子吸收光子能量而从价带跃迁到导带,从而在半导体中产生电子—空穴对。这种过程称为受激吸收。这是光探测器光电转换的基本原理,其载流子跃迁过程如图6.2—1(b )所示。
1.3 受激光发射
具有适当能量的入射光子在传播过程中未被吸收,且可以诱导半导体导带中的电子跃迁到价带与空穴复合而发射出一个与入射光具有相同特性(如频率、相位、偏振、传播方向)的光子。这种过程称为受激光发射,如图6.2—1(c )所示。
2.光波导
在上述三种半导体光源中,光的限制和导行是用介质波导实现的。图6.2-2给出了三层平板介质波导的示意图。波导成立的条件是
312n n n ≥> (6.2-1)
式中2n 是有源层的折射率,3n 和1n 分别是上限
制层和下限制层的折射率。根据这个条件,图
6.2-2所示的1-2层界面上的光线角θ12大于临
界角θ c )
/(sin 211n n c -=θ (6.2-2)
对于2-3层界面可
以写出相似的公式。当
(6.2-1)式满足时,光
波沿平行于界面的方向
导行。
3. LD 的受激辐射和光
增益
导带 价带 (a )自发辐射 (b )受激吸收 (c )受激发射 图6.2-1 半导体中的光发射与光吸收
图6.2-2 三层平板介质波导层示意图
LD 是一种相干辐射光源,与其他类型的激光器一样,它必须满足以下基本条件:(1)有源区内必须形成粒子数反转分布,即处于高能态导带底的电子数远多于处于低能态价带顶的空穴数,这是由向有源区注入载流子来实现的。(2)具备一个合适的谐振腔以获得光反馈而形成激光振荡。(3)有源区提供的光增益必须等于或大于各种光损耗之和,即必须满足激射振荡的电流阈值条件。
图6.2-3为LD 芯片的基本结构(宽接触结构)示意图,LD 具有两个互相平行的解理面和两个粗糙的侧面(采用条形结构时则不需要这两个粗糙侧面)。这两个解理面限定了F-P (法布里-珀罗)谐振腔。
通过p-n 结注入的少数载流子,可以辐射复合,也可以非辐射复合。辐射复合产生的光子,可以与价带内的电子相互作用而被吸收,也可以与导带内的电子相互作用而引起受激发射相同的光子。伯纳德和杜拉福格给出了受激发射的必要条件,即当光子引起电子由导带跃迁到价带并发射相同光子的几率大于电子吸收光子由价带跃迁到导带的几率时,受激发射就超过了吸收,则净受激发射率为正值。要满足这一条件,则应满足下式:
该式称为伯纳德-杜拉福格条件,图6.2-4为该条件的示意图。E FC 、E FV 分别为导带和价带的准费米能级,跃迁是从导带中能量为E 2的态至价带中能量为E 1的态,υh 为光子能量。该式表明,半导体中产生受激发射的必要条件是导带与价带的准费米能级之差大于光子能量。
当注入载流子浓度高到足以使受激发射超过吸收时产生光增益。为了实现激光振荡,要求有一部份辐射光正反馈,这种反馈通常由垂直于波导轴线的一对解理面提供(见图6.2-3),两个解理面之间的单程增益等于该距离上的总损耗时产生激射振荡。因而,阈值增益g th 可以表示为:
2
11ln 21R R L g i th +=α (6.2-4)
式中i α为内部损耗,通常是由自由
载流子吸收和光学不均匀散射引起
的,R 1、R 2分别为两个反射腔面的
反射率,L 为F-P 腔的腔长。
阈值电流密度J th 即维持激射
振荡所需的最小电流密度,它取决
于特定的器件结构,计算比较复杂,
可参考文献[1]-[3]。
4. SLD 中的光增益
SLD 的光发射是一种放大的自
)
32.6(12-=->-υh E E F E FV FC 图6.2-4 伯纳德和杜拉福格条件示意图
发辐射,光在波导中传播时获得光增益,但不存在光反馈(理想情况下)或者光反馈很弱,因而不会形成激射振荡,可将其视为一种具有单程光增益的半导体光放大器,它辐射出的光为弱相干光。
具有相同端面反射率R 的半导体光放大器结构的增益为: l RG G R G R G s s s β2cos 21)1(222-+-= 式中Gs 为单程增益,β为传播常数,l 为器件腔长。如果R 不等于零,当2βl 分别为π的偶数倍和奇数倍时,增益分别达到最大值G max 和最小值G min ,因而调制系数可以由下式给出
22min max min max 12s
s G R RG G G G G m +=+-= (6.2-6) 理想的SLD 应是m=0,此时净增益为单程增益Gs,输出功率为PsGs ,Ps 是在泵浦电流下自发辐射的导行分量。在增益饱和之前,Gs 可以由下式表示。
]exp[])(exp[0l d kI l d J g G i
s ααηΓ-Γ=-Γ= (6.2-7) 式中g 0是以cm 2/A 为单位的增益系数,J 是以A/cm 2为单位的注入电流密度,d 是以cm
为单位的有源层厚度,Γ是光限制因子,l 是以cm 为单位的有源区长度,ηi 是内量子
效率,α是以cm -1为单位的衰减常数,k=g 0ηi /s,s 是以cm 为单位的有源区条宽,I 是
以A 为单位的电流。
6.2.3超辐射发光二极管的结构与工艺
1. SLD 的芯片结构
目前用于光纤传输领域的SLD 的发射波长主要有850nm 、1300nm 和1550nm 三个波段,850nm SLD 采用GaAlAs/GaAs 材料系,1300nm 和1550nm SLD 采用InGaAsP/InP 材料系。材料结构基本上都是采用双异质结结构,即把一个窄带隙半导体材料夹在两个宽带隙半导体材料之间,这种由两种具有不同基本物理参数的半导体单晶材料所形成的晶体界面称为异质结,这两种材料之间的主要差别是能带隙和折射率不同。它与由两个相同半导体单晶材料所形成的p-n 结——同质结相比,具有注入效率高、载流子限制和光限制好等优点。因而采用异质结结构的器件具有高的发光效率,且可以形成良好的光波导。
SLD 芯片均采用条形结构,在平行于结平面的方向引入了载流子限制和光限制。这种侧向限制可达到以下几个目的:(1)减小电流通道截面以降低工作电流;(2)选择适当的条宽,可保证沿结平面方向的基模发射,且易于与光纤耦合;(3)由于绝大部份结平面离开了表面而改善了退化情况。
实现器件超辐射工作的关键是抑制光反馈,当这种对光反馈的抑制阻止了SLD 的激射振荡时,取决于光增益谱的自发辐射放大形成了其发射光谱。这意味着SLD
是一种弱
相干光源,其光谱宽度远宽于LD 的光谱宽度,而比LED 的光谱宽度窄。
抑制光反馈的方法有很多种,例如在芯片端面镀AR (抗反射)膜,引入光吸收区,采用倾斜波导和弯曲波导等。图6.2-5给出了以上列举的几种结构示意图。在这些结构中都采用了窄条形有源区,这样可以在较小的电流下获得较大的输出功率,并且光斑尺
寸小,有利于与单模光纤耦合。
图6.2-5(a)所示的结构是在普通的条形LD 的基础上采用端面镀抗反射膜的方法形成的,其特点是工艺简单。但是这种结构即使在两个端面都镀上抗反射膜,它仍具有剩余端面光反射和高的增益,F-P 腔纵模将引起较强的光谱调制。
图 6.2-5(b)为脊波导结构器件,它由一段有源区(泵浦区)和一段无源吸收区组成,并且在端面镀上抗反射膜。对脊宽、有源区和无源区长度进行优化,可以获得较高的输出光功率和很低的光谱调制度。
图6.2-5(c)是一种斜波导结构,设计这种结构的关键是要适当选择有源条形区相对于端面的倾角θ。为了尽量降低耦合进有源区的反射光功率,角θ要足够大,使得端面反射光透过有源区横向边壁而不会反射入有源区,从而避免F-P 腔谐振。另一方面,为了获得较大的光输出,θ又必须远小于端面处的临界角。
图 6.2-5(d)是一种弯曲波导结构。它由一段直的掩埋条形有源区和一段弯曲的掩
(d)
(c)
(a
) (b)
P 面电
N 面电极
埋条形吸收区组成。有源区后面的吸收区吸收后向传播的光,弯曲的吸收区与后解理端面的倾角大于全反射的临界角,因而即使在高的激励条件下,向后端面传播的光在端面反射时也不会重新耦合进吸收区,所以这种结构能有效地抑制激射振荡,从而获得较低的光谱调制度。
此外,为了扩展SLD的谱宽,Osamu Mikami等人采用了一种双有源层结构,即SLD 有源层中包含两层重叠的有源层,两层有源层的带隙波长稍有差别。这种SLD的增益谱近似为每一有源层材料的增益谱之和,因而与具有单层有源层的SLD相比,这种SLD的总的发射光谱会展宽,其光谱宽度(FWHM)达到80nm。
2. SLD芯片工艺
SLD芯片的制作工艺大致可以划分为材料生长,条形波导结构制作,欧姆接触,端面镀膜和后部工艺。其工艺在原理上与半导体电子器件的工艺有很多相似之处,但由于对光电子器件的性能有特殊要求,在制作过程中采用了不少新工艺和新技术。
2.1 材料生长
在SLD芯片制作中,最常用的外延材料生长方法是LPE(液相外延)法和MOCVD(有机金属化学气相淀积)法。
LPE法中最常用的是降温法,即在一定温度下将单晶衬底与某种饱和或过饱和溶液接触并逐渐降温时,溶质从溶剂中析出而在衬底上外延生长出所需要的单晶薄层。LPE 法具有设备简单,使用可靠,生长的晶体质量较高,能利用非平面衬底生长不同结构的器件等优点。其缺点是欲生长晶体与衬底间的晶格失配不能过大,否则就难于生长。此外,LPE法的生长速率快,并且难于控制,因而不适于超薄单晶层的生长,它通常用于制作体材料器件。
采用MOCVD法生长III-V族化合物半导体材料时,是以III族元素的有机化合物和V族元素的氢化物如Ga(CH3)3、Al(CH3)3、In(C2H5)3、AsH3、PH3等作为源材料,用SiH4、Zn(C2H5)2、Cd(CH3)2等作为掺杂剂,以H2或惰性气体作为载气。它们以气流方式混合后流经处于反应室中的加热衬底表面时产生热分解反应,从而在衬底上生长出所需要的III-V族化合物半导体(如GaAs,InP)及其多元固溶体(如GaAlAs,InGaAsP,InGaAs)薄层。
采用MOCVD法生长半导体单晶薄层时,可以精确控制外延层的组分和层厚,能生长出面积大、层厚非常均匀,界面陡峭,过渡区很窄的异质结结构,因而特别适合于制作量子阱SLD。此外,采用MOCVD可以实现多片生长,很适合于外延材料的批量生长。2.2 条形结构制作
实际上可用的SLD都采用条形结构(见图6.2-5), 利用掩膜对材料进行选择性刻蚀形成所需条形结构。刻蚀可采用湿法化学腐蚀或干法刻蚀(如离子铣、反应离子刻蚀等)。SiO2、Si3N4、Al2O3等介质膜的形成分别可采用CVD(化学汽相淀积)、PECVD(等离子增强化学汽相淀积)、磁控溅射、电子束蒸发等方法来实现。
2.3 欧姆接触
金属电极可以采用蒸发或溅射的方法获得。这里有二个基本指导原则:(1)避免电极与外延层表面过度合金化,因为有源层距表面只有几微米;(2)衬底面用合金化的低电阻率电极,P型外延层表面可采用Zn扩散方法进行高掺杂以利于形成低接触电阻率
的电极。n 面电极材料通常采用AuGeNi/Au 、Sn/Au 等,p 面电极材料通常采用Zn/Au 、Cr/Au 或Ti/Pt/Au 等。
2.4 AR 膜制作工艺
在SLD 研制中,常常采用AR 膜与吸收区相结合来抑制激射,从而实现超辐射工作。AR 膜应满足以下条件,即f f s f n h n n 4/,λ==。f n 和s n 分别为AR 膜和衬底的折射率,f h 为AR 膜的厚度,λ为光在真空中的波长。对于AlGaAs 和InGaAsP SLD ,采用的膜材料有Si 3N 4、SiO 2、Al 2O 3、TiO 2等。可以采用溅射、反应溅射、电子束蒸发等方法在SLD 端面上生长AR 膜。
2.5 后部工艺
将制作完毕的晶片解理成单个SLD 管芯,将管芯烧焊在过渡热沉(通常为铜或金刚石)上,并压焊上金丝引出电极。
3. SLD 组件结构
在大多数情况下需要把SLD 管芯、半导体致冷器、热敏电阻及后向探测器等组装在管壳内,并将SLD 的光输出耦合进单模光纤或保偏光纤中以便用于光纤陀螺系统。
图6.2-6是SLD 组件结构示意图和实物照片。光纤与SLD 管芯光学对准,把SLD 发射出的光有效地耦合进光纤。热敏电阻阻值的变化反映了SLD 工作温度的变化,调节半导体致冷器的工作电流可以改变SLD 的工作温度,通过外电路可以实现对器件的温控。后向探测器用于探测SLD 管芯的后向光输出,后向光输出的变化反映了SLD 前向输出光功率的变化,可以通过外电路调节SLD 驱动电流而实现对器件的光控。有效的温控和光控可以有效地稳定组件的光输出特性。
4. SLD 组件的组装及耦合封装工艺
SLD 组件的组装及耦合封装主要包括热匹配设计,热传导设计,焊接工艺,光学对准,光纤固定及气密性封装等。
SLD 组件中各元件的组装可以采用分级钎焊。SLD 管芯需要与管壳出光孔进行光学对准以便于与光纤耦合。为了减小光纤端面的光反射,可将光纤头拉锥或磨角。用五维精密微动台把光纤与SLD 管芯的发射光束对准,再用激光焊机将光纤固定。最后用平行缝焊系统在N 2气氛中封盖,从而保证组件内部不含其它有害气体,并确保组件的气密性。
耦合封装工艺的关键是热匹配设计,由于组件中各部件所采用材料的热膨胀系数不一样,在温度大范围变化时可能会引起光纤与SLD 发射光斑间的相对位移,不管是横向或纵向位移都会导致耦合效率的变化,引起光纤输出功率变化,严重时甚至会导致光
纤断裂。因而组件中各部件(如支架,光纤导管等)所采用的材料和几何尺寸都要仔细考虑热匹配问题。此外,组装应力的影响也应引起注意,耦合前应尽量消除组装应力,这通常是采用各部件组装后在较高温度下烘烤来加速应力释放。
5. 量子阱SLD
通常将两种或两种以上具有不同组分或导电类型的超薄层(相邻势阱内电子波函数产生交叠)材料交替生长形成的周期性结构称为超晶格材料,把具有较厚势垒层、相邻势阱中电子波函数不产生交叠的周期性结构称为多量子阱(MQW ),而只有一个势阱、两边具有势垒层的结构称为单量子阱(SQW )。图6.2-7给出了量子阱结构及其能带示意图。
在量子阱结构中,当窄带隙材料的厚度薄到足以与电子的德布洛意波长L (L=h/p ≈50nm ,h 为普朗克常数,p 为载流子动量)相比拟,或者说可与玻尔半径(1nm ~50nm )相比拟时,半导体的能带结构、载流子的有效质量、以及载流子的运动状态都会发生很大改变,会产生量子尺寸效应。在体材料结构中,带边态密度呈抛物线分布,且可以近似看成准连续的,其运动状态是三维的。而在量子阱结构中,阱层中的载流子运动状态不能再近似用自由粒子来描述。在这种
情况下,电子被限制在有限势阱中,在
垂直于结平面方向的态密度不再是准
连续的,而是呈阶梯状分布,也就是说
被量子化了。其能量只能取一系列分立
值E 1、E 2、E 3…En ,如图6.2-8所示。
而在平行于结平面方向,载流子的运动
是自由的。由此,电子在阱中的运动是
准二维的。二维运动电子的态密度取决
于载流子有效质量和阱层厚度,而与能
量无关。 图6.2-7
(a)多量子阱;(b) 单量子阱;
Ega 、Egb 分别为阱层和势垒层的禁带宽度;dw 、db 分别为阱层和势垒层的厚度
E ga E gb
E gb E ga
量子阱SLD 可以采用SQW 结构,也可以采用MQW 结构。由于在有源层中引入了量子阱结构,态密度呈阶梯状分布而导致量子尺寸效应,使得在少量载流子注入情况下就可以获得高的光增益。除此之外,量子阱SLD 与体材料SLD 相比,在垂直于结平面的方向具有较小的光限制因子,这意味着该方向的发散角较小,且光斑尺寸展宽。与体材料SLD 相比,量子阱SLD 的光输出功率高得多,且与光纤的耦合效率较高。
在SLD 中,由于端面对TE 模的光反馈比对TM 模的光反馈强,因而TE 模可获得更大的增益,所以光输出中TE 模占优势,但这种优势并不能满足偏振系统的要求,最为方便的方法是采用一定长度的单模光纤与偏振器相结合以消除两个导引偏振模中的一个偏振态,但最终消光偏振器可能限制系统的性能。在FOG 系统中,减小误差的一种替代方法是采用非偏振光,在系统中无需偏振器。干涉仪中两个偏振模被同等激劢,一个偏振模引起的误差抵消了另一个偏振模引起的误差。
随着量子阱材料的研究进展和超精细薄层材料生长技术(如MBE 、MOCVD )的发展,又提出了具有一定晶格失配的应变量子阱概念。对于小于临界厚度(超过这一厚度,则弹性应变被破坏,会产生大量位错)的晶层,引起的双轴共面应力会使晶格的立方对称发生正方形变,而使价带结构发生变化,但很难影响导带。当阱层的弛豫晶格参数大于势垒层的弛豫晶格参数时,则阱层处于双轴压应变状态,反之,则阱层处于张应变状态。无论是压应变还是张应变都会使量子阱材料的价带结构发生改变,使得空穴的有效质量减小,非辐射复合降低,损耗减小。在压应变量子阱中,处于价带顶的是重空穴带。而在张应变量子阱中,处于价带顶的是轻空穴带。在压应变量子阱中产生的是导带电子到价带重空穴的跃迁,它对TE 模有大的动量矩阵元平方值,只提供TE 偏振增益。在张应变量子阱中产生的是导带电子到价带轻空穴的跃迁,它对TM 模有大的动量矩阵元平方值,主要提供TM 偏振增益,同时也
提供TE 偏振增益。 L.F.Tiemeijen
等人1992年首次对1.3μm 波长的
器件进行了阐述,提出在一个有源
层中,同时包含张应变量子阱和压
应变量子阱可以成功地防止MQW 半
导体光放大器的偏振敏感性,其原
理如图6.2-9所示。这种新颖的概
念是可以用调整两类应变量子阱
(应变或组分以及阱宽)的方法来
平衡带隙,从而获得相等的TE 模和
TM 模增益,也就是说采用这种方法可以制作出偏振不敏感的SLD 。此外,也可以只采用张应变材料获得
偏振不敏感SLD 。
6. 体材料SLD 和量子阱SLD 的比较
与体材料SLD 相比,量子阱SLD 具有更高的微分量子效率,可获得更高的光输出功率,并且其增益谱比体材料更宽,因而量子阱SLD 比体材料SLD 具有更宽的发射光谱。此外,如果在SLD 有源层中将压应变与张应变加以组合,则可以制作出偏振不敏感的SLD 。但是量子阱SLD 也存在一些问题,在高载流子注入情况下,量子阱SLD 的光增益谱中基态能级的光增益系数容易饱和,而一阶激励能级变强,因而光增益谱容易出现双峰,从而使得SLD 的发射光谱出现双峰。这种情况在AlGaAs SLD 中容易产生,因此优化SLD 结构显得特别重要。双峰光谱具有比单峰光谱更宽的谱宽,因而在某些
特定应用场合也许是优点。此外,与体材料SLD相比,量子阱SLD具有更高的增益,光谱调制具有增强的趋势。
一般认为,在低输入电流下要求具有较高光输出的应用中量子阱SLD更为合适,而在要求高光功率输出情况下仍具有低光谱调制度和单峰光谱的应用中体材料SLD更为合适。
光纤陀螺仪测试方法 1范围 本标准规定了作为姿态控制系统、角位移测量系统和角速度测量系统中敏感器使用的单轴干涉性光纤陀螺仪(以下简称光纤陀螺仪)的性能测试方法。 2规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注目期的引用文件,其随后所有的修改单(不包含勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。 GB321-1980优先数和优先系数 CB998低压电器基本实验方法 GJB585A-1998惯性技术术语 GJB151军用设备和分系统电磁发射和敏感度要求 3术语、定义和符号 GJB585A-1998确立的以及下列术语、定义和符号适用于本标准。
3.1术语和定义 3.1.1干涉型光纤陀螺仪interferometric fiber optic gyroscope 仪萨格奈克(Sagnac)效应为基础,由光纤环圈构成的干涉仪型角速度测量装置。当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干涉强度即反映出角速度的变化。 3.1.2陀螺输入轴input axis of gyro 垂直于光纤环圈等效平面的轴。当光纤陀螺仪绕该轴有旋转角速度输入时,产生光纤环圈相对于惯性空间输入角速度的输出信号。 3.1.3标度因数非线性度scale factor nonlinearity 在输入角速度范围内,光纤陀螺仪输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。 3.1.4零偏稳定性bias stability 当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
2005年第24卷第6期 传感器技术(J o u r n a l o f T r a n s d u c e r T e c h n o l o g y) 综述与评论 光纤陀螺仪的发展现状 周海波,刘建业,赖际舟,李荣冰 (南京航空航天大学导航研究中心,江苏南京210016) 摘 要:根据光纤陀螺仪的工作原理和特点,光纤陀螺仪具有不同的分类。介绍了国外光纤陀螺仪的现状,预测了近期和长远的发展趋势,旨在对我国的光纤陀螺技术的发展能有所帮助。 关键词:光纤陀螺仪;萨格纳效应;干涉型;谐振式;布里渊式 中图分类号:T N2,T P2 文献标识码:A 文章编号:1000-9787(2005)06-0001-03 D e v e l o p m e n t s t a t u s o f f i b e r-o p t i c g y r o s c o p e s Z H O UH a i-b o,L I UJ i a n-y e,L A I J i-z h o u,L I R o n g-b i n g (N a v i g a t i o nR e s C e n t e r,N a n j i n gU n i v e r s i t yo f A e r o n a u t i c s a n dA s t r o n a u t i c s,N a n j i n g210016,C h i n a) A b s t r a c t:T h ef i b e r-o p t i cg y r o s c o p e(F O G)i sc l a s s i f i e d i n t od i f f e r e n tt y p e sa c c o r d i n gt oi t sp r i n c i p l ea n d c h a r a c t e r i s t i c.T h e i n t e r n a t i o n a l s t a t u so f F O G i si n t r o d u c e da n dt h es h o r t-t e r m a n dl o n g-t e r m t r e n do f F O G i s f o r e c a s t.I t w i l l b eb e n e f i t t o t h e c o u r s e o f o u r F O G. K e yw o r d s:F O G(f i b e r-o p t i c g y r o s c o p e);S a g n a c e f f e c t;i n t e r f e r o m e t r i c;r e s o n a n t;B r i l l o u i n 0 引 言 光纤陀螺仪属于第四代陀螺仪———光学陀螺仪的一种,其基本工作原理基于萨格纳效应,即在同一闭合光路中从同一光源发出两束特征相同的光,沿相反的方向进行传播,汇合到同一探测点,产生干涉。若存在绕垂直于闭合光路所在平面的轴线相对惯性空间转动的角速度,则沿正、反方向传播的光束产生光程差,该差值与角速度成正比。通过光程差与相应的相位差的关系,可通过检测相位差,计算角速度。它一般由光纤传感线圈、集成光学芯片、宽带光源和光电探测器组成。与传统的机械陀螺仪相比,具有无运动部件、耐冲击、结构简单、启动时间短、灵敏度高、动态范围宽、寿命长等优点。与另一种光学陀螺仪———环形激光陀螺仪相比,光纤陀螺仪不需要光学镜的高精度加工、光腔的严格密封和机械偏置技术,能够有效地克服了激光陀螺的闭锁现象,易于制造。 本文从光纤陀螺仪的原理和优点出发,着重对光纤陀螺仪的分类、国外研究现状及其发展趋势做了详细的介绍,希望对我国的光纤陀螺的研制和发展有所裨益。 1 光纤陀螺仪的分类 光纤陀螺仪按照不同的分类标准,有不同的分类结果。按结构可分为单轴和多轴光纤陀螺,光纤陀螺的多轴化正是其发展方向之一。按其回路类型可分为开环光纤陀螺和闭环光纤陀螺两类,开环光纤陀螺不带反馈,直接检测光输出,省去许多复杂的光学和电路结构,具有结构简单、价格 收稿日期:2004-11-20便宜、可靠性高、消耗功率低等优点,缺点是靠增加单模光纤的长度来提高陀螺的灵敏度,输入-输出线性度差、动态范围小,主要用作角度传感器[1]。闭环光纤陀螺包含闭环环节,大大降低光源漂移的影响,扩大了光纤陀螺的动态范围,对光源强度变化和元件增益变化不敏感,陀螺漂移非常小,输出线性度和稳定性只与相位变换器有关[2],主要应用于中等精度的惯导系统,对光纤陀螺的小型化和稳定性有重要作用,是高精度光纤陀螺研究的主要趋势。 按照光学系统的构成可分为全光纤型和集成光学器件型。全光纤陀螺成本较低,但实现高精度的技术难度较大,大多用于精度要求不高和低成本的场合。集成光学器件光纤陀螺在信号处理中可以采用数字闭环技术,易于实现高精度和高稳定性,是目前最常用的光纤陀螺构成模式。 按照性能和应用的角度可分为速率级、战术级和惯性级等3个级别[3]。速率级光纤陀螺已经产业化,主要应用于机器人、地下建造隧道、管道路径勘测装置和汽车导航等对精度要求不高的场合。日本、法国等国家研制、生产的这种精度的陀螺仪,已大批量应用到民用领域。战术级光纤陀螺具有寿命长、可靠性高和成本低等优点,主要用于战术导弹、近程/中程导弹和商用飞机的姿态对准参考系统中。惯性级光纤陀螺主要是用于空间定位和潜艇导航,其开发和研制正逐步走向成熟,美国有关公司和研究机构是研制、生产该级别光纤陀螺的佼佼者,如H o n e y w e l l,N o r t h r o p等公司。 1
中国光纤陀螺仪行业 市场调研投资分析预测报告
正文目录 第一章光纤陀螺仪行业概述 (19) 第一节光纤陀螺仪简述 (19) 一、定义及分类 (19) 二、产品特性 (20) 三、主要应用领域 (21) 第二节光纤陀螺仪的型号及用途 (21) 第三节光纤陀螺仪行业发展现状 (22) 第四节产业链结构分析 (25) 第五节光纤陀螺仪生产技术和工艺分析 (28) 第六节光纤陀螺仪在生产中遇到的问题及其解决方法 (31) 第七节光纤陀螺仪行业的地位分析 (31) 一、行业在第二产业中的地位 (31) 二、行业在GDP中的作用 (31) 第八节2015-2020年光纤陀螺仪行业相关政策发展的影响展望 (32) 一、国家“十三五”产业政策发展的影响展望 (32) 二、相关行业政策的影响展望 (32) 第二章中国光纤陀螺仪行业政策技术环境分析 (34) 第一节光纤陀螺仪行业政策法规环境分析 (34) 一、国家“十三五”规划解读 (34)
二、行业“十三五”规划解读 (34) 三、行业税收政策分析 (35) 四、行业标准概述 (36) 五、行业环保政策分析 (36) 六、行业政策走势及其影响 (36) 第二节政策法规对光纤陀螺仪产品的影响 (37) 一、2014-2015年中国光纤陀螺仪环保政策执行影响分析 (37) 二、节能环保新政策对光纤陀螺仪市场的影响 (37) 三、新政策对光纤陀螺仪市场的影响 (37) 第三节光纤陀螺仪行业技术环境分析 (38) 一、国内技术水平现状 (38) 二、国际技术发展趋势 (38) 三、科技创新主攻方向 (39) 第三章光纤陀螺仪生产技术分析 (41) 第一节光纤陀螺仪主要生产工艺技术 (41) 一、光纤陀螺仪生产工艺原理 (41) 二、光纤陀螺仪生产工艺流程 (42) 第二节光纤陀螺仪其他生产方法 (43) 第三节光纤陀螺仪生产工艺优劣势比较 (46) 第四节光纤陀螺仪工艺技术的改进与发展趋势 (46) 第五节光纤陀螺仪工艺技术路线的选择 (46) 第六节光纤陀螺仪质量指标 (47)
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920267079.2 (22)申请日 2019.03.04 (73)专利权人 江西寻准智能科技有限责任公司 地址 332000 江西省九江市九江经济技术 开发区综合工业园区内绿冬丝科园区 5号楼 (72)发明人 冯唐荣 黄芳 祝露峰 余贤 (74)专利代理机构 北京纽乐康知识产权代理事 务所(普通合伙) 11210 代理人 苏泳生 (51)Int.Cl. G01C 19/72(2006.01) (54)实用新型名称 一种用于光纤陀螺的光纤环 (57)摘要 本实用新型公开了一种用于光纤陀螺的光 纤环,包括光纤环骨架,光纤环骨架为工字环结 构,光纤环骨架上下端面之间的外环壁为光纤绕 制环面,光纤环骨架的上端面为光纤盘装面且光 纤盘装面上设置有两个出纤螺线槽;光纤绕制环 面设有光纤环且光纤环两出纤端涂胶盘于光纤 盘装面上;光纤环外侧设有保温外层,光纤环骨 架的中心圆孔内设置有保温内层。本实用新型设 置有保温外层和保温内层,能够减少温度对于光 纤陀螺影响, 提高光纤陀螺的稳定性。权利要求书1页 说明书2页 附图3页CN 209512878 U 2019.10.18 C N 209512878 U
权 利 要 求 书1/1页CN 209512878 U 1.一种用于光纤陀螺的光纤环,包括光纤环骨架(1),其特征在于,所述光纤环骨架(1)为工字环结构,所述光纤环骨架(1)上下端面之间的外环壁为光纤绕制环面(2),所述光纤环骨架(1)的上端面为光纤盘装面(3)且所述光纤盘装面(3)上设置有两个出纤螺线槽(4);所述光纤绕制环面(2)设有光纤环(5)且所述光纤环(5)两出纤端涂胶盘于光纤盘装面(3)上;所述光纤环(5)外侧设有保温外层(6),所述光纤环骨架(1)的中心圆孔内设置有保温内层(7)。 2.根据权利要求1所述的用于光纤陀螺的光纤环,其特征在于:所述保温外层(6)为环带状且两边沿设有垂直于环带的延展部(61),所述延展部(61)覆盖住所述光纤环骨架(1)上下端面的外沿部分,且所述延展部(61)对应两个所述出纤螺线槽(4)开设有孔(62)。 3.根据权利要求1所述的用于光纤陀螺的光纤环,其特征在于:所述保温内层(7)为环带状且紧贴所述光纤环骨架(1)的中心圆孔内壁。 4.根据权利要求1所述的用于光纤陀螺的光纤环,其特征在于:所述光纤环(5)按四极对称绕制。 5.根据权利要求1所述的用于光纤陀螺的光纤环,其特征在于:两个所述出纤螺线槽(4)沿所述光纤环骨架(1)的轴心对称布置。 6.根据权利要求1所述的用于光纤陀螺的光纤环,其特征在于:所述光纤环骨架(1)的下端面为封闭式结构。 2
2005年第24卷第6期 传感器技术(Journa l o f T ransducer T echno logy) 综述与评论 光纤陀螺仪的发展现状 周海波,刘建业,赖际舟,李荣冰 (南京航空航天大学导航研究中心,江苏南京210016) 摘 要:根据光纤陀螺仪的工作原理和特点,光纤陀螺仪具有不同的分类。介绍了国外光纤陀螺仪的现状,预测了近期和长远的发展趋势,旨在对我国的光纤陀螺技术的发展能有所帮助。 关键词:光纤陀螺仪;萨格纳效应;干涉型;谐振式;布里渊式 中图分类号:TN2,T P2 文献标识码:A 文章编号:1000-9787(2005)06-0001-03 Devel op m ent status of fiber optic gyroscopes Z HOU H a i bo,LI U Jian ye,LA I Ji zhou,LI Rong b i n g (Navi gati on Res Cen ter,Nan jing Un iversity of Aeronau tics and A stronau tics,N an ji ng210016,China) Abstract:The fi ber opti c gyroscope(FOG)is c lassified i nto different types acco rd i ng t o its pr i nc i ple and character i sti c.The i n ternati onal status of FOG is i ntroduced and the short ter m and l ong ter m trend o f FOG i s forecast.It w ill be bene fit to t he course o f our FOG. K ey word s:FOG(fi ber optic gyro scope);Sagnac e ffect;i nterfero m e tric;resonan t;B rillou i n 0 引 言 光纤陀螺仪属于第四代陀螺仪 光学陀螺仪的一种,其基本工作原理基于萨格纳效应,即在同一闭合光路中从同一光源发出两束特征相同的光,沿相反的方向进行传播,汇合到同一探测点,产生干涉。若存在绕垂直于闭合光路所在平面的轴线相对惯性空间转动的角速度,则沿正、反方向传播的光束产生光程差,该差值与角速度成正比。通过光程差与相应的相位差的关系,可通过检测相位差,计算角速度。它一般由光纤传感线圈、集成光学芯片、宽带光源和光电探测器组成。与传统的机械陀螺仪相比,具有无运动部件、耐冲击、结构简单、启动时间短、灵敏度高、动态范围宽、寿命长等优点。与另一种光学陀螺仪 环形激光陀螺仪相比,光纤陀螺仪不需要光学镜的高精度加工、光腔的严格密封和机械偏置技术,能够有效地克服了激光陀螺的闭锁现象,易于制造。 本文从光纤陀螺仪的原理和优点出发,着重对光纤陀螺仪的分类、国外研究现状及其发展趋势做了详细的介绍,希望对我国的光纤陀螺的研制和发展有所裨益。 1 光纤陀螺仪的分类 光纤陀螺仪按照不同的分类标准,有不同的分类结果。按结构可分为单轴和多轴光纤陀螺,光纤陀螺的多轴化正是其发展方向之一。按其回路类型可分为开环光纤陀螺和闭环光纤陀螺两类,开环光纤陀螺不带反馈,直接检测光输出,省去许多复杂的光学和电路结构,具有结构简单、价格 收稿日期:2004-11-20便宜、可靠性高、消耗功率低等优点,缺点是靠增加单模光纤的长度来提高陀螺的灵敏度,输入-输出线性度差、动态范围小,主要用作角度传感器[1]。闭环光纤陀螺包含闭环环节,大大降低光源漂移的影响,扩大了光纤陀螺的动态范围,对光源强度变化和元件增益变化不敏感,陀螺漂移非常小,输出线性度和稳定性只与相位变换器有关[2],主要应用于中等精度的惯导系统,对光纤陀螺的小型化和稳定性有重要作用,是高精度光纤陀螺研究的主要趋势。 按照光学系统的构成可分为全光纤型和集成光学器件型。全光纤陀螺成本较低,但实现高精度的技术难度较大,大多用于精度要求不高和低成本的场合。集成光学器件光纤陀螺在信号处理中可以采用数字闭环技术,易于实现高精度和高稳定性,是目前最常用的光纤陀螺构成模式。 按照性能和应用的角度可分为速率级、战术级和惯性级等3个级别[3]。速率级光纤陀螺已经产业化,主要应用于机器人、地下建造隧道、管道路径勘测装置和汽车导航等对精度要求不高的场合。日本、法国等国家研制、生产的这种精度的陀螺仪,已大批量应用到民用领域。战术级光纤陀螺具有寿命长、可靠性高和成本低等优点,主要用于战术导弹、近程/中程导弹和商用飞机的姿态对准参考系统中。惯性级光纤陀螺主要是用于空间定位和潜艇导航,其开发和研制正逐步走向成熟,美国有关公司和研究机构是研制、生产该级别光纤陀螺的佼佼者,如H oneyw el,l N orthrop等公司。 1
导航级干涉型光纤陀螺仪的性能进展 摘 要 过去Litto n公司报导过温度范围在-55~74℃的动态环境中,曾达到0.0027(°)/ h的角随机游走,0.0092(°)/h的偏值不稳定性,9.2ppm的标度因数误差和0.381/s的输入角对准误差。这些仪器中,陀螺仪环圈外径小于7.62cm,高不到2.54cm。本文报告了Lit ton公司导航级干涉型光纤陀螺仪(I FO G)的技术新进展。叙述了利用低双折射网和保偏网的I FO G光学结构,讨论了I FO G因热感应和磁感应造成误差的主要来源,并提供了导航级IFO G的最新数据。 主题词 干涉型光纤陀螺仪(IFO G) 导航级光纤陀螺仪 误差 热偏值 角随机游走(A RW) 磁偏值误差 *偏振非互易性(PN R) 1 概述 20多年来,干涉型光纤陀螺仪已从实验室中的新产品发展成为可以投产、可靠且低成本的仪器,成为旋转传感市场上许多不同应用中的机械式和环形激光陀螺仪(RLG)的有力竞争产品。战术级干涉型光纤陀螺仪已投产若干年了。三年前报导过Litto n公司的IFOG首次达到了导航级性能。在这些报导中,我们的IFO G偏值性能达到0.01(°)/h,动态温度环境扩大到-55~71℃,温度变化率为0.5℃/min,直接从陀螺仪的传感环圈中测得。我们还第一次报 导了标度因数性能优于 1.0ppm和输入轴对准性能优于0.51 s (在同样温度范围内)。在动态 温度环境中,达到这样先进的偏值、标度因数和输入轴对准性能,是因为采用了有1km长光纤的传感环圈的仪表,它装在直径小于7.62cm的组合内。因此,与导航级应用中的机械式和环形激光陀螺仪相比,它在尺寸上很有竞争优势。 本文中,我们将报导导航级IFOG取得的进展。将首先分析IFO G在动态温度环境中性能的误差源。第二部分讨论在环圈中,随时间变化的温度扰动造成的偏值误差和“Shupe”偏值误差。第三部分讨论偏振非互易误差(PN R)。第四部分简单地讨论一下降低偏值磁灵敏度的问题。第五部分叙述导航级IFOG这种光学结构的仪器以两个网络为基础,第一个网络由低双折射光纤和低双折射器件构成;第二个网络只由保偏光纤和保偏器件构成。第六部分给出了这种仪表测得的最新数据。第七部分是结论。 2 由于随时间变化的温度扰动而造成的偏值误差 2.1 背景 自从Shupe发表论文讲述了由于传感环圈内因温度分布变化不对称而造成旋转角误差以后,许多工作人员都想方设法减少不对称性。Shupe建议采用折射指数温度系数低的玻璃纤维,他还建议采用一种环圈缠绕方法,即让光纤与相邻的环圈中点保持同样的距离。Frigo 讨论了几种偏值补偿技术,包括:保护环圈不受温度变化的影响(假设用绝缘方法),选择热膨胀和折射指数温度系数低的玻璃,在环圈中放入导热率高的材料,通过改变、温度“减短”环圈的方法减少热梯度。他证明了环圈半径上的温度为线性时,与“简单”缠绕(光纤一头位于内半径,一头位于外半径)相比,对称缠绕和四极缠绕减少偏值误差的效果好。我们定义简单缠绕的Shupe偏值与改进缠绕的偏值的比为改进比(IR)。Ruffin考虑了高频效应或温度变化 · 51 · 飞航导弹 1998年第1期
光纤陀螺仪 现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。1976年Vali等提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等等优点,所以目前光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。在这篇文章中,我们主要介绍现代光纤陀螺仪的原理和设计。 现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多。也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,这样就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。从这个简单的介绍可以看出,干涉式陀螺仪在实现干涉时的光程差小,所以它所要求的光源可以有较大的频谱宽度,而谐振式的陀螺仪在实现干涉时,它的光程差较大,所以它所要求的光源必须有很好的单色性。 光纤陀螺仪具有很高的精度和灵敏度。现在光纤陀螺仪已经达到0.01度/hr。 为了了解光纤干涉陀螺仪的基本结构,首先要了解光纤耦合器。光纤耦合器是一种光纤式的光能的分配元件。它是由两根平行的光纤将它们的内侧面磨平贴合在一起所形成的。不过现在制造光纤耦合器的方法已经不是这样的了。现代的方法是利用一种对光纤具有腐蚀作用的酸,在容器中将酸液的平面升高,在这个高度上正好可以将两根光纤的外层全部腐蚀掉。然后将这两根经过腐蚀的光纤加压贴紧,在相对较高的温度下对光纤进行拉伸。在拉伸的同时,利用仪器来测量输出的光能的分配情况,当光能分配满足耦合器的设计要求时,保持和固定耦合器的这一状况,这样一个合格的光纤耦合器就制成了。通过这种结构,当在一根光纤中一个入口有光通过时,它会经过耦合器的分配,将光在两根光纤出口中同时输出,同时两根光纤出口中的能量分配具有恒定的比例。和光线在介质表面的反射和透射一样,这样在输出的光中,在同一根光纤出口中的光是经过连接面的反射来实现的,而在另一根光纤出口中的光是经过连接面的折射来实现的,这两个光纤出口的光之间具有90度的相位差。如果我们用数字来表示光纤的进出口,1和2表示是进口,3和4表示是出口,其中1和3是同一根光纤,而2和4是同一根光纤,这将对后面的讨论比较方便一些。关于光纤耦合器两个输出的光之间的相位差的问题可以很简单地用一个闭合的环形干涉仪来说明:假设一束光射到一个50%比50%的分光片上,它的透射光经过三个反射镜回到分光片后,经过反射到达光源所在的方向;而从分光片反射的光,经过相同的三个反射镜后,回到分光片,经过透射同样到达光源所在的方向。 这两束光的强度均应该是入射光强度的1/4,因为光学的可逆性的原理,它们相干以后的光强应该等于入射光的强度。从这里看,它们之间的相位差应该等于零。如果考察与入射方向成直角的另一个出口的情况,根据光学的可逆性,在这个出口上,光的总能量应该等于零。也就是说,在这个出口上,两束光之间的相位差为180度。这两束光一束是经过两次分光片的反射,另一束是经过分光片的两次透射。所以如果仅仅考察一次反射和一次透射的两束光,它们的相位差一定是90度。 和光纤耦合器具有相同作用的是光学的Y形波导管,这也是一种光能分配的元件。不过它的体积更小,更具有集成性。它是这样制成的:首先在铌酸锂的晶块上利用照相制版使钛金属在晶体的表面上画出一个Y形状的线条,然后利用高温使钛分子渗入铌酸锂的晶粒中,从而形成一个折射率高的Y形状的光学波导管。和光纤耦合器不同,光学波导管只有一个入口,从中输出的两束光和光纤耦合器也不同,一般具有相同的相位。但是光学波导管和光纤的连接是一个很难解决的实际问题,光学波导管的截面和光纤截面的形状大不相同,因此在接口处的因为间隙,不匹配和中心偏移会
光纤陀螺技术规范 Q/AG L07 ×.××-2003 光纤陀螺技术岗位规范1 范围本规范规定了光纤陀螺岗位职责和岗位标准。。 本规范适用于光纤陀螺岗位的初级.中级.高级职务人员。 2 引用标准 Q/AG L071.1-2003职工政治思想和职业道德通用标准 3 岗位职责3.1负责光纤陀螺初样.正样.和定型产品研制的全部技术工作。 3.2严格贯彻执行国标.部标.企标及有关科研技术.质量管理和安全技术法规。 3.3负责项目.技术论证.可行性研究论证.技术经济分析和项目的申报工作。 3.4根据研制合同,制定阶段和年度工作计划,并组织实施。 3.5参加本专业及相关专业的技术会议,评审本专业范围内的科研成果。 3.6贯彻全面质量管理,负责对试验中出现的各种技术问题进行分析论证.改进设计。 3.7根据工程化的实际要求,改进光纤陀螺的性能.环境适应性,不断采用新技术.新工艺改制和研究新样机,以满足武器装备的新需求。 3.8根据项目进展情况,适时编写专题技术总结.专题研究报告和鉴定申请报告。
3.9负责技术转让,技术咨询,技术服务以及资料管理和完成技术资料归档工作。 4 岗位标准4.1 政治思想与职业道德执行Q/AG L071.1-2003职工政治思想与职业道德通用规范4.2 文化程度4.3 专业理论知识4.3.1 初级职务4.3.1.1具有高等数学.物理光学.模拟和数字电路等基础理论知识。 4.3.1.2具有光纤陀螺的原理及构成等专业理论知识。 4.3.1.3掌握光纤陀螺性能指标测试的流程和试验规范。 4.3.1.4懂得光纤陀螺技术参数的含义。 4.3.1.5了解光纤陀螺的研制过程和有关技术标准。 4.3.1.6初步掌握一门外语,并能查阅本专业书刊.资料。 4.3.2 中级职务4.3.2.1具有光纤技术.信号分析.自动控制.计算机接口等基础理论知识。 4.3.2.2熟悉各种相关光学和电子仪器设备的操作,精通电路图。 4.3.2.3熟悉光纤陀螺的组装.调试以及技术指标的采样测试。 4.3.2.4掌握光纤陀螺的研究现状及存在的问题,了解关键技术。 4.3.2.5熟悉光纤陀螺各种技术参数的形成原因和改进方向。 4.3.2.6掌握一门外语,并能较熟练的查阅本专业书刊.资料。
光纤陀螺仪的应用及发展 谷军,蔺晓利,何南,姜凤娇,邓长辉 (大连海洋大学信息工程学院) 摘要:本文介绍了光纤陀螺的工作原理,并根据光纤陀螺的特点介绍了在各个领域的应用,阐述了光纤陀螺在国内外的发展现状,并指出了光纤陀螺的发展趋势。从发展角度看,光纤陀螺仪将成为21世纪前期的发展重点。 关键词:光纤陀螺;现状;应用; 0 引言 萨格纳克(Sagnac)在1913年首先论证了运用无运动部件的光学系统能够检测出相对惯性空间的旋转的奇特现象,现在统称为萨格纳克效应。1976年Vali和Shorthill首次提出了光纤陀螺(Fiber optic gyro)的概念,它标志着第二代光学陀螺的诞生。光纤陀螺一问世就以其明显的优点、结构的灵活性以及诱人的前景引起了世界上许多科学家和工程师的普遍关注。国内对光纤陀螺的研究也有20多年的历史,经历开环到闭环的研究历程。在20多年的研究过程中,光纤陀螺的广泛应用前景已经得到了专家的认可,光纤陀螺作为惯性技术的核心器件,已经逐渐成为陀螺市场的主流产品。人类对光纤陀螺的需求也变得十分迫切。 光纤陀螺的应用非常广泛,是基于Sagnac效应的原理工作的。作为继激光陀螺仪之后出现的新一代陀螺,各国的研制工作已经取得了重大的进展。光纤陀螺仪的研制对惯性导航和控制领域十分重要,随着计算机、微电子和光纤技术的发展和应用,它将取代传统的机械陀螺和平台惯导系统。与机械陀螺相比,光纤陀螺无运动部件、使用寿命长;全固化结构、抗冲击能力强;测量动态范围大、无预热时问、启动时问短;不受地球吸引力影响;工艺相对简单,价格便宜;对捷联应用有先天优势。与激光陀螺相比,光纤陀螺的成本低、性价比高;体积小、功耗低、应用灵活;克服了激光陀螺闭锁带来的负效应;随着工艺和信号处理方案的发展,精度也可以和激光陀螺相当。 1 光纤陀螺仪 光纤陀螺仪是光学陀螺仪的一种。所谓光学陀螺仪就是利用萨格纳克Sagnac)效应构成的陀螺仪。利用光纤线圈构成的干涉仪效应来敏感角运动的装置称为干涉型光纤陀螺仪(IFOG);采用光纤作为谐振器来敏感角运动的装置称为谐振型光纤陀螺仪(RFOG);利用布里渊光纤环形激光器的频率变化原理构成的测角装置称为布里渊光纤陀螺仪(BFOG)。由于光学陀螺仪不象传统陀螺那样,依靠自转子的动量矩来敏感角运动。所以国外学术界也把这类陀螺定义为非陀螺仪角运动敏感器。 1.1光纤陀螺仪的特点 光纤陀螺仪作为一种新兴传感器件,具有许多深受欢迎的特点:(1)无运动部件,仪器牢固稳定,耐冲击和抗加速度运动;(2)结构简单,零部件少,价格低廉;(3)启动时间短(原理上可瞬间启动);(4)检测灵敏度和分辨率高(可达10 -7rad/s);(5)可直接用数字输出并与计算机接口联网;(6)动态范围极宽;(7)寿命长,信号稳定可靠;(8)易于采用集成光路技术;(9)克服了激光陀螺因闭锁现象带来的负效应。 光纤陀螺最大的特点是可根据不同的用途,选择不同的光纤长度和线圈直径及不同的信息处理方法,可覆盖陆地、航空、航天、航海等所有陀螺仪应用范围。与传统陀螺仪(液浮
光纤陀螺综述 摘要:从光纤陀螺诞生以来,它就以其显著的优点,灵活的结构和诱人的前景引起了世界上诸多国家的大学和科研机构的普遍重视,为此综述了光纤陀螺的基本原理和它的特点以及分类,,着重描述和总结了光纤陀螺在国内外发展的技术趋势和产业化情况。可以看到,随着现代微电子技术、光电子技术和信号处理技术的发展,光纤陀螺在未来惯性测量领域中占据越来越重要的位置。 关键词:光纤陀螺,Sagnac效应,发展 引言 自从1976年美国犹他大学的V ALI和SHORTHILL等人成功研制第1个光纤陀螺(fiber-optic gyroscope, FOG)以来,光纤陀螺已经发展了30多年。在30多年的发展过程中,许多基础技术如光纤环绕制技术等都得到了深入地研究。 光纤陀螺仪的突出特点使其在航天航空、机载系统和军事技术上的应用十分理想,因此受到用户特别是军队的高度重视,以美、日、法为主体的光纤陀螺仪研究工作已取得很大的进展。光纤陀螺仪研究工作大部分集中在干涉式,只有少数公司仍在研究谐振式光纤陀螺。光纤陀螺的商品化是在上世纪90年代初才陆续展开,中低精度的光纤陀螺(特别是干涉式光纤陀螺)己经商品化,并在多领域内应用,高精度光纤陀螺仪的开发和研制正走向成熟阶段。 在国外,l°/h至0.01°/h的工程样机已用于飞行器惯性测量组合装置。美国利顿公司已将0.1°/h的光纤陀螺仪用于战术导弹惯导系统。新型导航系统FNA2012采用了l°/h的光纤陀螺仪和卫星导航GPS.美国国防部决定光纤陀螺仪的精度1996年达到0.01°/h ;2001年达到0.001°/h;2006年达到0.0001°/h ,有取代传统的机械陀螺仪的趋势。 1、原理[1][9] 光纤陀螺的基本工作原理来自Sagnac效应。Sagnac效应是相对于惯性空间转动的闭环光路中断传播光的一种普遍的相关效应,即在同一闭合光路中从同一光源发出的两束特征相同的光,以互为相反的方向传输并最后汇聚到同一探测点;若绕垂直于闭合光路所在平面的垂线,相对惯性空间存在着旋转角速度,则正、反两束光走过的光程不等,产生光程差。理 论上可以证明,其光程差与旋转角速度成正比,即-------------------------(1) 式中L为光纤长度;D为光纤环直径;λ为光波长;c为真空中光速;Ω为转动角速度。使用低损耗单模光纤形成环状,其总长L可达几百米甚至上千米,可大幅度地提高环形干
光纤陀螺仪与其他陀螺仪的比较 现代陀螺仪是现代航空、航海、航天和国防工业中广泛使用的一种惯性制导仪器,它的发展对一个国家的工业、国防和其它高科技的发展具有十分重要的战略意义。传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。自从上个世纪七十年代以来,现代陀螺仪的发展己经进入了一个全新的阶段。1976年提出了现代光纤陀螺仪的基本设想以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等优点,所以目前光纤陀螺仪在很多的领域已经完全取代了机械式的传统陀螺仪,成为现代导航仪器中的关键部件。和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。 机械陀螺有静电、气浮、液浮等类型陀螺仪,其中静电陀螺仪的漂移率可以达到0.001°/h,甚至更高,能够满足惯性级的精度要求。但是无论是早期的滚珠轴承陀螺,还是后来发展起来的液浮陀螺、挠性陀螺和静电陀螺,这些机械陀螺都有一个共同的特点,就是采用高速转子。由于高速转子容易产生质量不平衡问题,容易受到加速度的影响,而且需要一段预热时间,转速才能达到稳定。同时,高速转子的磨损较快令其使用寿命有限。机械陀螺共性是存在体积大,结构复杂,可靠性低,带宽和动态范围窄等问题。 压电振动陀螺有振弦、音叉、音片、H型、方框型、MF型、圆环型、杯型、圆管型、圆片型等结构形式,振动陀螺的一大特点是体积小、结构简单、可靠性高。传统的机械陀螺有300多个部件,激光陀螺和光纤陀螺也至少有十几个零件,而压电振动陀螺只有几个工作部件一振梁和换能器。它既无机械陀螺的转动部件,又无光纤陀螺和激光陀螺由于光藕合带来的许多麻烦,从而大大提高了可靠性。此外,它还具有许多优良特性;启动时间很短(<15),角速度测量范围宽,具有耐冲击和振动等恶劣环境的能力网。压电振动陀螺的缺点在于精度较低,主要应用于小型飞机的姿态控制、汽车的安全导航、舰船稳定控制等方面。 微机械陀螺存在诸多问题;精度不是很高,稳定性差和可靠性低,仅在一些低精度场合应用,它的应用还处于初始阶段。但随着技术的发展和需求的牵引,其前景十分广阔。尤其是它可以批量生产,因而,其价格低廉(在美国市场上微陀螺价格在50美元左右),具有很大的优势。 光纤陀螺是一种全固态的光学陀螺仪,它的主要优点在于;①无运动部件,仪器牢固稳定,耐冲击且对加速度不敏感;②结构简单,零部件少,价格低廉;③启动时间短(原理上可瞬间启动);④检测灵敏度和分辨率极高(可达10rad/s);⑤可直接用数字输出并与计算机接口联网;⑥动态范围极宽(约为2000°/s);⑦寿命长,信号稳定可靠;⑧易于采用集成光路技术;⑨克服了因激光陀螺闭锁现象带来的负效应;⑩可与环形激光陀螺一起集成捷联式惯性系统传感器。 从以上论述可以看出,光纤陀螺与其它陀螺相比有着非常大的优势,具体各种性能比较见下表。
FIBER OPTIC ROTATION SENSOR SPECIFICATION / MANUAL VG 951 - 1235 4,6-15 Not used + 5 V Contact Name Comments Power input +5V ± 0.25V, 300mA max, ripple 10mV max within 0-1MHz GND Power return line, ground OUTPUT AGND Output voltage proportional to rotation,scale factor - 24 mV/deg/sec Differential input recommended Analog ground to use with Differential input recommended Galvanic coupling with "OUTPUT""GND" FIZOPTIKA Cable Output connector DESCRIPTION OF OUTPUT CONNECTOR DHS-15M OUTLINE DRAWING RECOMMENDATIONS AND PRECAUTIONS 1. Do not deform housing 2. Fragile components inside - no shocks, no drop 6. Power must be off during connecting 3. Treat as electrostatic sensitive unit 4. Is designed to be mounted inside water protected equipment 5. Increased humidity shortens essentially lifetime PHYSICAL PARAMETERS °± 0.5° to the reference plane 3. Weight - 320 gram ( 400 gram max )4. Volume - 0.55 litre 5. Housing material - plastic 6. Tolerances per ISO 2768-m MAIN PARAMETERS ( typical values ) deg /s 24 mV /deg /s 0... kHz 0.05 deg / h 1 deg / h 0.1 %01 s ENVIRONMENT RELIABILITY Rate range Scale Factor (SF) Frequency range Angle random walk Bias stability, RMS SF stability, RMS Readiness time .MTBF 20000 hours (20С, predicted )Lifetime (predicted ) 15 years 600.451Temperature operating -30°C ... +70°C endurance -55°C ... +75°C Vibration (operating), RMS 2 g , 20Hz ... 500Hz Vibration (endurance), RMS 6 g , 20Hz ... 2000Hz Shocks (endurance) 90 g , 1 ms Acceleration (operating) 5 g Acceleration (endurance) 20 g , 5 s °Precision class - 4 Estimated for low humidity CONNECTION DIAGRAM
光纤陀螺仪测试规范 1范围 本方案规范了光纤陀螺的技术要求、质量保证和交货准备等方面的要求,以及相应的测试条件、测试项目、测试方法、测试程序,适用于在航海、航空、航天及陆用等惯性技术领域中应用的陀螺仪的设计、制造及检验。 2 测试条件与测试设备 2.1测试条件 2.1.1 环境条件 2.1.1.1 大气条件 标准大气条件如下: 环境温度:23℃±2℃ 相对湿度:20%~80% 大气压力:86KPa ~ 106KPa 5 测试主要项目 5.1.1 光纤陀螺在室温环境下性能 a) 标度因数; b) 标度因数非线性度; c) 标度因数不对称度; d) 标度因数重复性。 5.1.2 零偏 a) 零偏; b) 零偏稳定性; c) 零偏重复性(逐次、逐日)。 5.1.3 阈值 5.1.4 随机游走系数 5.2 振动环境性能 5.3 冲击试验 5.4 标度因数、零偏、零偏稳定性与环境温度项目综合测试 a) 标度因数温度灵敏度;
b) 零偏温度零敏度; c) 陀螺启动时间; d) 温度梯度对陀螺零偏的影响。 6 测试方法 6.1 标度因数 6.1.1 标度因数数值 6.1..1.1 测试设备 a) 具有角度输出的速率位置转台(速率平稳度优于5×10-3,测量范围大于±0.001°/s ~ ±500°/s ); b) 陀螺输出测试和记录装置; c) 陀螺测试专用工装夹具。 6.1.1.2 测试程序 陀螺仪通过安装夹具固定在速率转台上。在输入角速率范围内,按GB321规定的R5系列,适当圆整,均匀删除后选取输入角速率,在正转、反转方向输入角速率范围内,分别不能小于11个角速率档,包括最大输入角速率。当速率平稳时进行测试。程序如下: a) 转台加电,设定转台的转动角速度、速率值和转动方向,接通陀螺仪电源,预热一定时间。转台输入角速率按从小到大的顺序改变,转台正转测试陀螺仪输出,停转;转台反转,测试陀螺仪输出停转; b) 设定采样间隔时间为1S 及采样次数,测试陀螺仪测试陀螺仪输出量,求得该输入角速率下陀螺仪输出的平均值; 6.1.1.3 计算方法 设j F 为第j 个输入角速度时光纤陀螺仪输出的平均值,标度因数绝对值计算方法见公式: j F = 1 N 1 N jp p F =∑ (1) 式中: j F —陀螺仪第P 个输出值,N —采样次数。 转台静止时陀螺输出的平均值为: 1 ()2r s e F F F =+ (2) 式中: s F —测试开始时,陀螺仪输出的平均数值; e F —测试停止时,陀螺仪输出的平均数值。
光纤陀螺仪的发展及应用 摘要: 作为光纤传感器的一种,光纤陀螺仪具有了更多的优点,它具有结构紧凑,灵敏度高,工作可靠等等优点,就是因为这些优点,光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。本文主要介绍了光纤陀螺仪的工作原理,特点,分类,应用及发展现状。 关键词: 光纤传感器,陀螺仪,光纤陀螺仪,导航系统。 Abstract: As one of the fiber sensors,FOG has more advantages.It has a compact structure,high sensitivity,high reliability and so on.Just because of these advantages,FOG nearly replace all the traditional mechanical gyroscopes and become the critical component of modern navigational instruments.This paper introduces the working principle,the features,sorts,usage and statues of development of the FOG. Key words: fiber sensors,gyroscopes,FOG,navigation system. 引言: 现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,