
二、填空题
1、自动控制作为一门学科常被划分为:
2、控制理论按其发展的不同分为:
3、控制系统的输入量分为:
4、一般的控制系统常常有这些环节:
5、自动控制系统按输入信号的特征可分为:
6、自动控制系统按系统参数是否随时间变化分为:
7、对控制系统提出的基本要求可归结为自动系统应具有:
三、名词解释
1、执行环节:
2、反馈环节:
3、离散控制系统:
4、连续控制系统:
5、自动控制系统的准确性:
6、自动控制系统的快速性:
7、自动控系统的数学模型:
8、控制系统的传递函数:
9、拉氏变换:
10、超调量:
11、一阶系统:
12、二阶系统:
四、简答题
1、控制系统在稳态值上下反复振荡的情形
2、一个简单的速度控制系统的结构单元
3、应用劳斯稳定判据时值得提及的几个问题
4、经典控制理论将二阶系统的分析放在突出的地位的原因
5、劳斯稳定判据叙述
6、基本环节的传递函数的内容
五、论述题
1、信号流图的几个术语
六、计算题
1、由劳斯稳定判据确定特征方程为a3s3+ a2s2 +a1s+ a0=0的控制系统稳定时各系数应满足的条件。
2、判定特征方程为s3+3 s3+4 s2+ 2s+5=0的系统的稳定性。
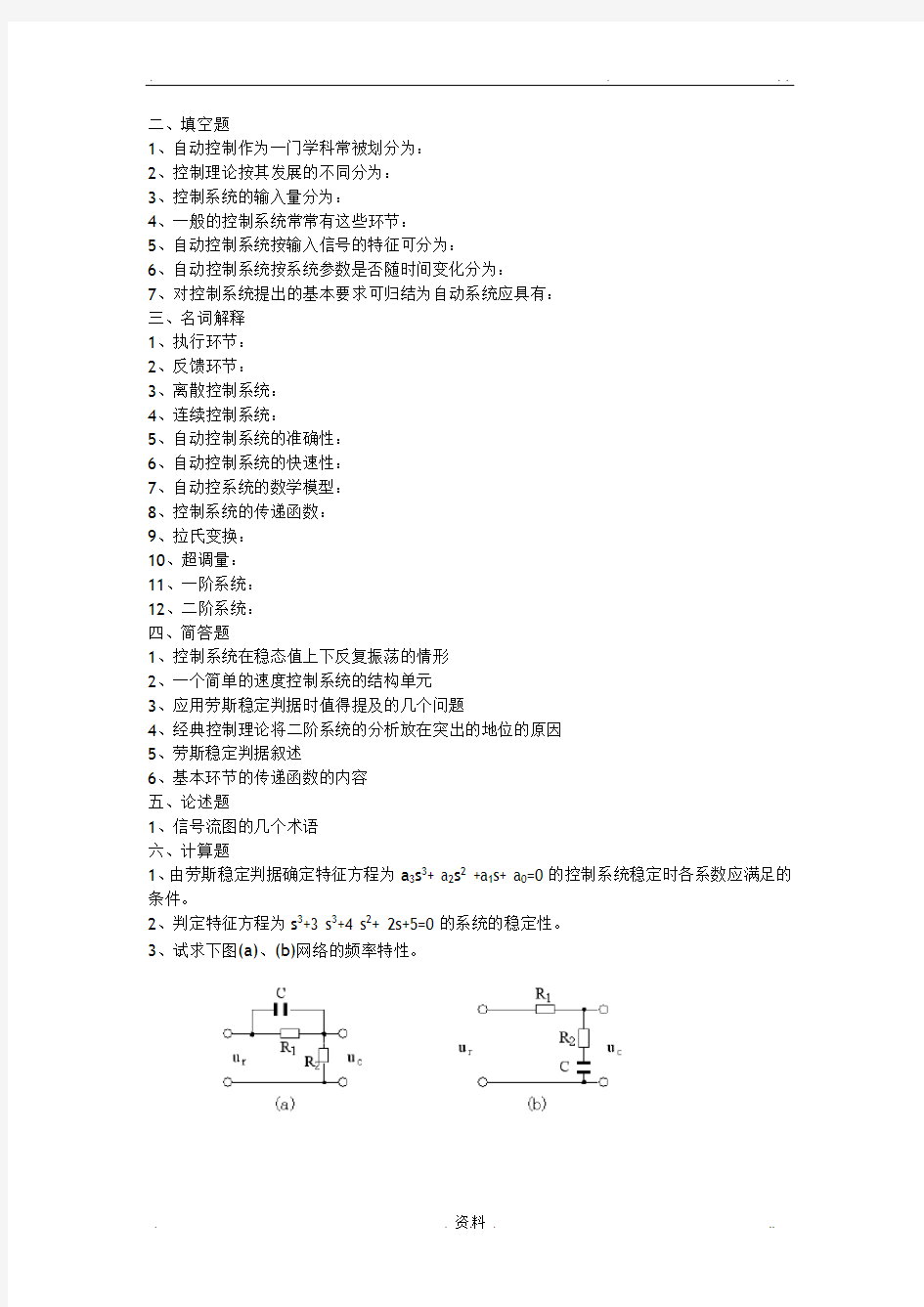
3、试求下图(a)、(b)网络的频率特性。
4、若系统单位阶跃响应如下,试求系统频率特性。 )0(8.08.11)(94≥+-=--t e e
t h t t
5、已知系统开环传递函数)
1()
1()(12++-=
s T s s T K s G ; 0,,21>T T K
当1=ω时,?-=∠180)(ωj G ,5.0)(=ωj G ;当输入为单位速度信号时,系统的稳态误差为1。试写出系统开环频率特性表达式)(ωj G 。
6、已知控制系统结构如图所示。当输入t t r sin 2)(=时,系统的稳态输出
)45sin(4)(?-=t t c s 。试确定系统的参数n ωξ,。
答案
二、填空题
1、自动控制作为一门学科常被划分为:自动控制技术、自动控制理论。
2、控制理论按其发展的不同分为:经典控制理论、现代控制理论。
3、控制系统的输入量分为:给定输入量和扰动输入量。
4、一般的控制系统常常有这些环节:给定环节、比较环节、放大环节、执行环节、控制环节、被控对象、反馈环节。
5、自动控制系统按输入信号的特征可分为:恒值控制系统、位置随动控制系统、程序控制系统。
6、自动控制系统按系统参数是否随时间变化分为:定常控制系统、时变控制系统。
7、对控制系统提出的基本要求可归结为自动系统应具有:稳定性、快速性、准确性。 三、名词解释
1、执行环节:是指由它的动作使被控量得到控制,是控制系统的末端环节。
2、反馈环节:将检测到的被控量反馈传输到输入端,与给定量进行比较以实现闭环控制。
3、离散控制系统:如果控制系统在信号传输过程中存在间歇采样、脉冲序列等离散信号的控制系统。
4、连续控制系统:系统中各处传输的信号均是时间t 的连续函数的控制系统。
5、自动控制系统的准确性:当系统输出量的动态变化过程结束后,输出量达到了稳态值。
6、自动控制系统的快速性:是指输出量跟输入量变化进入稳态的时间快。
7、自动控系统的数学模型:是指描述系统内部各物理量之间相互关系的数学表达式及其派
生的系统动态结构图。
8、控制系统的传递函数:将系统输出量对于输入量的微分方程在零初始条件下取拉普斯变换,变化后的输出量象函数之比。)
9、拉氏变换:是指定义在时域区间[0,∞)上的时间函数f (t )完成F (s )
?
∞
e t
f )(—
st
dt 的积分运算。
10、超调量:相应曲线首次达到的峰值超过稳态值的百分数为最大超调量,简称超调量。 11、一阶系统:由一阶微分方程描述的输出量关于输入量函数关系的系统。 12、二阶系统:由二阶微分方程描述的输入输出函数关系的系统。 四、简答题
1、控制系统在稳态值上下反复振荡的情形
答:第一,放大倍数虽然过大,但又不十分大,系统经多次振荡后能够稳定下来,稳定后的U c 被调到与输入量相适应的值,温度也稳定在稳定值;第二,放大器的放大倍数太大,电压没有一个与输入量相适应的稳定值,系统不稳定。 2、一个简单的速度控制系统的结构单元
答:具体包括:运算放大器单元、反相器单元、功率放大器单元、他励直流电动机单元、测速发电机与反馈电位器单元。
3、应用劳斯稳定判据时值得提及的几个问题
答:第一,劳斯表中出现全0行时,可由上一行的元素构建一个辅助方程,对其求一阶倒数得到一个降幂方程,由降幂方程的系数替代全0行的元素完成余下各行元素的计算;第二,如果某行的首列元素为0,而其余元素有不为0的,则用小正数ε替代首列0元素完成余下的计算,由ε→0的极限可确定余下首列元素的符号;第三,特征方程的系数不同号(系数为0属不同号范畴)时,首列元素符号必改变,系统不稳定。 4、经典控制理论将二阶系统的分析放在突出的地位的原因
答:第一,二阶系统较常见;第二,高阶系统在一定条件下与二阶系统的响应性能近似,可以按照满足近似条件的二阶响应系统的响应性能来分析和设计高阶系统。 5、劳斯稳定判据叙述
答:第一,劳斯表首列元素符号有变化时,闭环系统不稳定,不稳定的闭环极点数等于首列元素符号改变的次数;第二,如果劳斯表中出现全0行,说明有共轭虚根,共轭虚根的数量和数值可由上一行元素构成的辅助方程求解出来(由辅助方程求出的根含有共轭虚根,还可能含有数值相等的正负实根)。 6、基本环节的传递函数的内容
答:比例环节、积分环节、一阶惯性环节、二阶惯性环节、二阶振荡环节、微分环节、一阶微分布环节、二阶微分布环节、延迟环节。 五、论述题
1、信号流图的几个术语
答:a 、源节点,信号流图中的符号“。”表示节点,节点代表了线性方程组的变量。只有信号(信息)流出而没有信号流入的节点称为源节点,自源节点流出的信号是系统的输入量。b 、汇节点,只有信号流入而没有信号流出的节点称为汇节点,有时也将与汇节点相等的节点称为汇节点,汇节点对应于控制系统的输出量。c 、混合节点,既有信号流入也有信号流出的节点;d 、支路,相邻两个节点之间的定向连线,信号从支路的输入节点流向输出节点;e 、传输,指支路的传输系数,控制系统的传输指结构图框的传递函数,控制系统的稳态传输也称增益;f 、通路,若干个支路沿信号传输方向顺序地连接起来称为“通路”,通路的起始端和终止端分别是首条支路的输入节点和末尾支路的输出节点,沿通路行进时遇到同一节
点的次数不多于一次;g、前向通路,自源节点至汇节点的通路称为前向通路;h、回环,是闭合的通路,也称闭通路,只有一条支路的回环称为自环。I、回环传输,回环中各支路的传输之积是回环传输。J、不接触回环,回环与回环之间没有公共节点,则彼此称为不接触回环。
六、计算题
1、由劳斯稳定判据确定特征方程为a3s3+ a2s2 +a1s+ a0=0的控制系统稳定时各系数应满足的条件。
解:劳斯表为
s3a3 a1
s2a2 a0
s1(a2a1—a3a0)/ a20
s0a0
由劳斯稳定判据知,参数满足a i>0(i=0,1,2,3),a2a1—a3a0>0时系统稳定。
2、判定特征方程为s3+3 s3+4 s2+ 2s+5=0的系统的稳定性。
解:劳斯表为
S4 1 4 5
s3 3 2 0
s2310 5
s1-
10
250
s0 5
首列元素的符号由正变负,又由负变正改变了两次,有两个正实部(或正实数)的特征根,系统不稳定。
3、试求下图(a)、(b)网络的频率特性。
解(a)依图:
?
?
?
?
??
?
?
?
+
=
=
+
=
+
+
=
+
+
=
2
1
2
1
1
1
1
2
1
2
1
1
1
1
1
1
2
2
1
)1
(
1
1
)
(
)
(
R
R
C
R
R
T
C
R
R
R
R
K
s
T
s
K
sC
R
sC
R
R
R
s
U
s
U
r
cτ
τ
ω
ω
τ
ω
ω
ω
ω
ω
1
1
1
2
1
2
1
2
1
2
1
)
1(
)
(
)
(
)
(
jT
j
K
C
R
R
j
R
R
C
R
R
j
R
j
U
j
U
j
G
r
c
a+
+
=
+
+
+
=
=
(b)依图:
??
?+==++=
+
++
=C
R R T C
R s T s sC
R R sC R s U s U r c )(1
1
11)
()
(2122222212ττ ω
ω
τωωωωω2221211)(11)()()(jT j C R R j C R j j U j U j G r c b ++=+++==
4、若系统单位阶跃响应如下,试求系统频率特性。 )0(8.08.11)(94≥+-=--t e e t h t t
解 s
s R s s s s s s s C 1)(,)
9)(4(3698.048.11)(=
++=+++-=
则
)
9)(4(36
)()()(++=Φ=s s s s R s C 频率特性为 )
9)(4(36
)(++=
Φωωωj j j
5、已知系统开环传递函数)
1()
1()(12++-=
s T s s T K s G ; 0,,21>T T K
当1=ω时,?-=∠180)(ωj G ,5.0)(=ωj G ;当输入为单位速度信号时,系统的稳态误差为1。试写出系统开环频率特性表达式)(ωj G 。 解:依题意有:K s sG K s v
==→)(lim 0
, 11==K e ssv ,因此1=K 。
?-=-?--=∠180arctan 90arctan )1(12T T j G
?=-+=+901arctan arctan arctan 2
12121T T T
T T T 所以:121=T T
2
1
1T 1T 1
jT 1
jT )1j (G 212212=++=
+-+-= 联解得:2T 1=,5.0T 2=
最终得:)
2j 1(j 5.0j 1)j (G ω+ωω
-=
ω
6、已知控制系统结构如图所示。当输入t t r sin 2)(=时,系统的稳态输出
)45sin(4)(?-=t t c s 。试确定系统的参数n ωξ,。
解 系统闭环传递函数为
2
222)(n
n n
s s s ωξωω++=Φ 令 22
4
4)()1(222222==
+-=
Φn
n n
j ωξωωω ?-=--=Φ∠451
2arctan
)1(2
n n
j ωξω 联立求解可得 244.1=n ω,22.0=ξ。