
激光干涉仪产品具有测量精度高、测量速度快、测量范围大、分辨力高等优点。通过与不同的光学组件结合,可以实现对线性、角度、平面度、直线度(平行度)、垂直度、回转轴等参数的精密测量,并能对设备进行速度、加速度、频率-振幅、时间-位移等动态性能分析。在相关软件的配合下,可自动生成误差补偿方案,为设备误差修正提供依据。
激光干涉仪是当代国际机床标准中规定使用的数控机床精度检测验收的测量设备,本文就如何应用激光干涉仪(以中图仪器SJ6000激光干涉仪为例)检验数控机床的定位精度进行了讨论。
测量原理
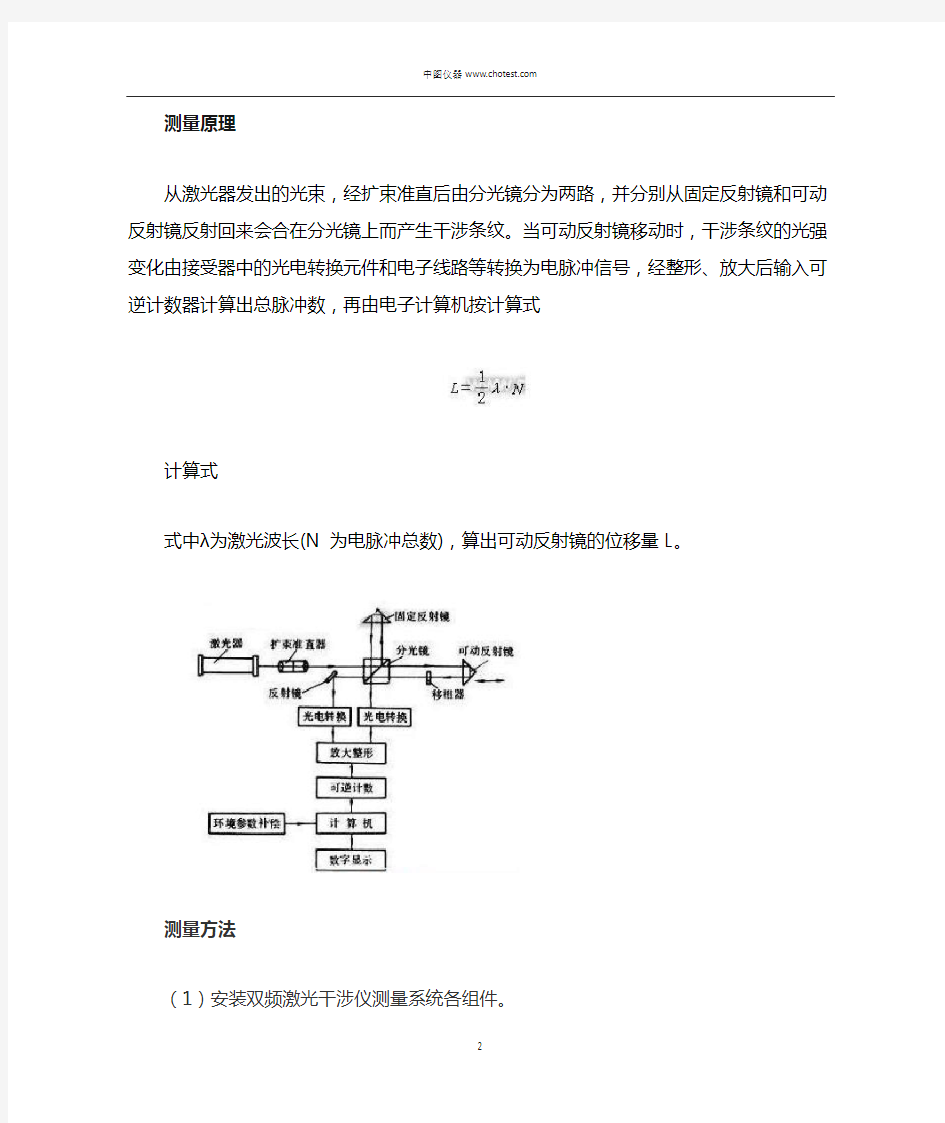
从激光器发出的光束,经扩束准直后由分光镜分为两路,并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而产生干涉条纹。当可动反射镜移动时,干涉条纹的光强变化由接受器中的光电转换元件和电子线路等转换为电脉冲信号,经整形、放大后输入可逆计数器计算出总脉冲数,再由电子计算机按计算式
计算式
式中λ为激光波长(N 为电脉冲总数),算出可动反射镜的位移量L。
测量方法
(1)安装双频激光干涉仪测量系统各组件。
(2)在需测量的机床坐标轴线方向安装光学测量装置。典型的安装如图所示:
(3)调整激光头,使双频激光干涉仪的光轴与机床移动的轴线昼在一条直线上,即将光路
调准直。
(4)待激光预热后输入测量参数。
(5)按规定的测量程序运动机床进行测量。
(6)数据处理及结果输出。
测量误差分析
用激光干涉仪检验数控机床定位精度的测量误差主要来源及分析如下:
1激光干涉仪的极限误差。
2安装误差
它主要是由测量轴线与机床移动的轴线不平行而引起的误差。
3温度误差
它主要是由机床温度和线膨胀系数不准备而造成的误差。
在各项测量误差中,温度误差对测量结果的准确性影响最大,所以,为了保证测量结果的准确性,测量环境温度应满足20±5℃,且温度变化应小于±0.2℃/h,测量前应使机床等温12h 以上,同时要尽量提高温度测量的准确度。另外,如果测量时安装不得当,由安装所造成的误差也是不可忽略的。
共享知识分享快乐 一.写出CAK6140数控车床检验标准 1.机床外观的检查 机床外观的检查一般可按通用机床的有关标准进行,但数控机床是高技术设备,其外观质量的要求更高。外观检查内容有:机床有无破损;外部部件是否坚固;机床各部分联结是否可靠;数控柜中的MDI/CRT单元、位置显示单元、各印制电路板及伺服系统各部件是否有破损,伺服电动机(尤其是带脉冲编码器的伺服电机)外壳有无磕碰痕迹。 2.机床几何精度的检查 数控机床的几何精度综合反映机床的关键零部件组装后的几何形状误差。数控机床的几 何精度检查和普通机床的几何精度检查基本类似,使用的检查工具和方法也很相似只是检查要求更高。每项几何精度的具体检测办法和精度标准按有关检测条件和检测标准的规定进行。 同时要注意检测工具的精度等级必须比所测的几何精度要高一级。现以一台普通立式加工中心为例,列出其几何精度检测的内容: 1)工作台面的平面度。 2)各坐标方向移动的相互垂直度。 3)X坐标方向移动时工作台面的平行度。 4)Y坐标方向移动时工作服台面的平行度。 5)X坐标方向移动时工作台T形槽侧面的平行度。 6)主轴的轴向窜动。 7)主轴孔的径向圆跳动。 8)主轴沿Z坐标方向移动时主轴轴心线的平行度。 9)主轴回转轴心线对工作台面的垂直度。 10)主轴箱在Z坐标方向移动的直线度。 对于主轴相互联系的几何精度项目,必须综合调整,使之都符合允许的误差。如立式加工中心的轴和轴方向移动的垂直误差较大,则可以调整立柱底部床身的支承垫铁,使立柱适当前倾或后仰,以减少这项误差。但是这也会改变主轴回转轴心线对工作台面的垂直度误差,因此必须同时检测和调整,否则就会由于这一项几何精度的调整造成另一项几何精度不合格。 机床几何精度检测必须在地基及地脚螺栓的混凝土完全固化以后进行。考虑到地基的稳定时间过程,一般要求在机床使用数月到半年以后再精调一次水平。 检测机床几何精度常用的检测工具有:精密水平仪、900角尺、精密方箱、平尺、平行光管、千分表或测微仪以及高精度主轴心棒等。各项几何精度的检测方法按各机床的检测条件规定。各种数控机床的检测项目也略有区别,如卧式机床比立式机床多几项与平面转台有关的几何精度。在检测中要注意消除检测工具和检测方法的误差,同时应在通电后各移动坐标往复运动几次,主轴在中等转速回转几分钟后,机床稍有预热的状态下进行检测。 3.机床性能及数控功能的试验 根据《金属切削机床试验规范总则》的规定,试验项目包括可靠性、静刚度、空运转振动、热变形、抗振性切削、噪声、激振、定位精度、主轴回转精度、直线运动不均匀性及加工精度等。在进行机床验收时,各验收内容需按照机床出厂标准进行。 1.机床定位精度的检查 数控机床的定位精度是表明机床各运动部件在数控装置控制下所能达到的运动精度。因此,更具实测的定位精度数值,可以判断出该机床以后在自动加工中所能达到的最好的加工精度。.
机械工程综合实 践 实验报告 课程名称机械工程综合实践 专业精密工程 指导教师彭小强 小组成员刘强14033006 谌贵阳 吴志明 实验日期2012.4.2—2011.6.25 国防科学技术大学机电工程与自动化学院
目录 1激光干涉仪 1.1激光干涉仪介绍 1.2激光干涉仪原理 2 激光干涉仪测量机床的直线度 2.1实验器材以及平台的搭建 2.2激光干涉仪的调试 2.3直线度的测量 3 激光干涉仪测量机床的重复定位精度3.1实验器材以及平台的搭建 3.2激光干涉仪的调试 3.3重复定位精度的测量 4 实验分析与总结
目录 一、实验目的与任务 (2) 二、实验内容与要求 (2) 三、实验条件与设备 (2) 四.实验原理 (3) 1.定位精度测量 (3) 2.直线度测量 (4) 五、实验步骤 (5) 1.设定激光测量系统 (5) 2.调整激光光束,使之与机器运动轴准直。 (5) 3.数据记录与数据处理 (6) 六、实验过程和结果 (8) 1.X轴定位精度 (8) 2.X轴直线度 (9) 3.误差分析 (11) 七、实验总结与体会 (14) 1.实验总结 (14) 2.实验心得体会 (14) 3.对课程的一些建议 (14)
综合实践3 伺服系统运动精度建模与评价 一、实验目的与任务 通过对三轴机床的X轴进行定位误差实验,使学生掌握一般机构空间运动精度的测量与分析评价方法。主要内容包括了解双频激光干涉仪测量位移的基本原理,掌握利用双频激光干涉仪测量机床进给轴的定位误差的方法,深刻理解轴运动的精度的概念。在对机床进给轴运动定位误差测量的基础上,分析机床的运动误差。 二、实验内容与要求 (1)直线轴运动误差测量。利用双频激光干涉仪建立直线轴定位精度、直线度、姿态误差的测量系统,并对机床典型三维进给机构各轴的运动误差进行测量,分析测量结果的不确定度; (2)垂直度测量。任选进给机构两轴,利用双频激光干涉仪建立两轴垂直度的测量系统,并对垂直度进行测量,并对测量结果进行评价; (3)典型三维进给机构的精度建模。在分析多轴进给机构拓扑结构的基础上,用多体系统理论和变分法建立多轴进给机构运动空间各点的运动误差传递模型; (4)典型三维进给机构的精度分析与评价。在测量得到的进给机构轴运动误差的基础上,利用所建立的精度模型,对机构的典型运动轨迹如直线、圆弧、平面等的运动误差进行分析,并对分析结果的不确定度进行评价。 三、实验条件与设备 双频激光干涉仪,含直线度、定位精度测量组件。具体如图1所示。 (图1 定位精度测量组件直线度测量组件)
数控车床几何精度检测 1.床身导轨的直线度和平行度 ☆纵向导轨调平后,床身导轨在垂直平面内的直线度 检验工具:精密水平仪 检验方法:如0001 所示,水平仪沿Z 轴向放在溜板上,沿导轨全长等距离地在各位置上检验,记录水平仪的读数,并记入“报告要求”中的表 1 中,并用作图法计算出床身导轨在垂直平面内的直线度误差。 ☆横向导轨调平后,床身导轨的平行度 检验工具:精密水平仪 检验方法:如0002 所示,水平仪沿X 轴向放在溜板上,在导轨上移动溜板,记录水平仪读数,其读数最大值即为床身导轨的平行度误差。
2.溜板在水平面内移动的直线度 检验工具:指示器和检验棒,百分表和平尺 检验方法:如0003 所示,将直验棒顶在主轴和尾座顶尖上;再将百分表固定在溜板上,百分表水平触及验棒母线;全程移动溜板,调整尾座,使百分表在行程两端读数相等,检测溜板移动在水平面内的直线度误差。 3.尾座移动对溜板移动的平行度 ☆垂直平面内尾座移动对溜板移动的平行度 ☆水平面内尾座移动对溜板移动的平行度 检验工具:百分表 检验方法:如0004 所示,将尾座套筒伸出后,按正常工作状态锁紧,同时使尾座尽可能的靠近溜板,把安装在溜板上的第二个百分表相对于尾座套筒的端面调整为零;溜板移动时也要手动移动尾座直至第二个百分表的读数为零,使尾座与溜板相对距离保持不变。按此法使溜板和尾座全行程移动,只要第二个百分表的读数始终为零,则第一个百分表相应指示出平行度误差。或沿行程在每隔300mm 处记录第一个百分表读数,百分表读数的最大差值即为平行度误差。第一个指示器分别在图中ab 位置测量,误差单独计算。
4.主轴跳动 ☆主轴的轴向窜动 ☆主轴的轴肩支承面的跳动 检验工具:百分表和专用装置 检验方法:如0005 所示,用专用装置在主轴线上加力 F ( F 的值为消除轴向间隙的最小值),把百分表安装在机床固定部件上,然后使百分表测头沿主轴轴线分别触及专用装置的钢球和主轴轴肩支承面;旋转主轴,百分表读数最大差值即为主轴的轴向窜动误差和主轴轴肩支承面的跳动误差 5.主轴定心轴颈的径向跳动 检验工具:百分表 检验方法:如0006 所示,把百分表安装在机床固定部件上,使百分表测头垂直于主轴定心轴颈并触及主轴定心轴颈;旋转主轴,百分表读数最大差值即为主轴定心轴颈的径向跳动误差
Radiation Harsh Application | 强辐射环境应用 强辐射环境下FPS3010激光干涉测量 Laser Interferometry in Radiation Harsh Environments using the FPS3010 介绍 目前,同步辐射应用已经扩展到多种邻域中,如生物科技(蛋白质晶体),医药研究(微生物),工程应用(高分辨率裂缝演变成像),高级材料研究(纳米结构材料)。在纳米领域许多应用中,如透镜组,布拉格反射器,狭缝以及目标定位等都需要非常高的分辨率。机械结构需要高集成度,高稳定性,并且要减小温漂以及定位误差的影响。另外,运动部件的质量需要严格控制到最低,从而提高机械特性,并且减小位置误差。 针对以上讨论,这意味着编码必须在待测物附近,也就是说,编码器即使不是在X光或者粒子束中,也需要安置在辐射区内。 FPS3010激光干涉仪最大的特点是皮米级分辨率,兼容真空环境,并且在此类应用中,可以采用远程控模块。因此,FPS3010可以工作在强辐射环境下,也就是将干涉仪系统以及子系统安装在同步辐射光源或者束线附近,以及其他高辐射的环境中。 在目前的传感器选型中,“M12”传感器探头可以工作在高达10MGy的辐射环境下。这个研究主要针对这些新型传感器的耐辐射强度。实验主要工作在60Co源下(1.17 MeV / 1.33 MeV γ- and 0.31 MeV β-rays)。实验证明在3MGy辐射强度下传感头的读数没有明显偏差。在第二步骤测试中,对比传感器头放置在10MGy强辐射环境前后,对固定目标的测量值。对比结果为传感器所得目标值没有明显偏差。将两个UHV真空兼容 M12传感头(一个是带AR膜透镜,一个是不带AR膜透镜),安装到聚酰亚胺光纤上,放置在1Gy/s辐射区域中。两个探测头都安装在铝支架上,实验过程中将会有20 nm/°C的温漂。为避免曝光情况,采用镀了金膜的耐辐射镜子,搭建3m反射腔。FPS3010控制器放置在探头测试腔体外,另一个带温控无辐射腔内。在整个测量周期内,腔内温度稳定性高于1℃。测试的最后,总累积量达3.024MGy。 测量 图2a显示在测试过程中,测得的位置值。编码器位置采样率为1kHz。在图中,每一个点为100次独立测量平均值。位置漂移观察周期为34天,采用镀膜传感器测量,3MGy累积量为150nm;未镀膜传感器3MGy累积量为400nm。由于信号保持性较好,所以测得位置值的不确定性(标准偏差)优于10nm。 在未镀膜传感器头,在累积总量达2MGy之后,漂移会略微增大(22.5天)。达到这点之后,可进行两个传感器头性能比较。图2b显示编码器(红线)以及控制器位置(蓝线)的温漂情况。整个周期中,温度漂移小于1℃。
数控机床精度检测 数控机床的高精度最终是要靠机床本身的精度来保证,数控机床精度包括几何精度和切削精度。另一方面,数控机床各项性能的好坏及数控功能能否正常发挥将直接影响到机床的正常使用。因此,数控机床精度检验对初始使用的数控机床及维修调整后机床的技术指标恢复是很重要的。 1、检验所用的工具 1.1、水平仪 水平:0.04mm/1000mm 扭曲:0.02mm/1000mm 水平仪的使用和读数 水平仪是用于检查各种机床及其它机械设备导轨的直线度、平面度和设备安装的水平性、垂直性。 使用方法: 测量时使水平仪工作面紧贴在被测表面,待气泡完全静止后方可读数。水平仪的分度值是以一米为基长的倾斜值,如需测量长度为L的实际倾斜值可以通过下式进行计算: 实际倾斜值=分度值×L×偏差格数
水平仪的读数:水平仪读数的符号,习惯上规定:气泡移动方向和水平移动方向相同时读数为正值,相反时为负值。 1.2、千分表
1.3、莫氏检验棒
2、检验内容 2.1、相关标准(例) ?加工中心检验条件第2部分:立式加工中心几何精度检验JB/T8771.2-1998 ?加工中心检验条件第7部分:精加工试件精度检验JB/T8771.7-1998 ?加工中心检验条件第4部分:线性和回转轴线的定位精度和重复定位精度检验JB/T8771.4-1998 ?机床检验通则第2部分:数控轴线的定位精度和重复定位精度的确定JB/T17421.2-2000 加工中心技术条件JB/T8801-1998 2.2、检验内容 精度检验内容主要包括数控机床的几何精度、定位精度和切削精度。 2.2.1、数控机床几何精度的检测 机床的几何精度是指机床某些基础零件本身的几何形状精度、相互位置的几何精度及其相对运动的几何精度。机床的几何精度是综合反映该设备的关键机械零部件和组装后几何形状误差。数控机床的基本性能检验与普通机床的检验方法差不多,使用的检测工具和方法也相似,每一项要独立检验,但要求更高。所使用的检测工具精度必须比所检测的精度高一级。其检测项目主要有: 直线度 一条线在一个平面或空间内的直线度,如数控卧式车床床身导轨的直线度。 部件的直线度,如数控升降台铣床工作台纵向基准T形槽的直线度。 运动的直线度,如立式加工中心X轴轴线运动的直线度。 平面度(如立式加工中心工作台面的平面度) 测量方法有:平板法、平板和指示器法、平尺法、精密水平仪法和光学法。 平行度、等距度、重合度 线和面的平行度,如数控卧式车床顶尖轴线对主刀架溜板移动的平行度。 运动的平行度,如立式加工中心工作台面和X轴轴线间的平行度。 等距度,如立式加工中心定位孔与工作台回转轴线的等距度。 同轴度或重合度,如数控卧式车床工具孔轴线与主轴轴线的重合度。 垂直度 直线和平面的垂直度,如立式加工中心主轴轴线和X轴轴线运动间的垂直度; 运动的垂直度,如立式加工中心Z轴轴线和X轴轴线运动间的垂直度。 旋转 径向跳动,如数控卧式车床或主轴定位孔的径向跳动。 周期性轴向窜动,如数控卧式车床主轴的周期性轴向窜动。 端面跳动,如数控卧式车床主轴的卡判定位端面的跳动。 2.2.2、机床的定位精度检验 数控机床的定位精度是测量机床各坐标轴在数控系统控制下所能达到的位置精度。根据实测的定位精度数值判断机床是否合格。其内容有:
数控机床精度的检测 论文关键词: 数控机床;几何精度;定位精度;切削精度;检测与注意事项。 论文摘要: 现代数控机床集合了电子计算机、伺服系统、自动控制系统、精密测量系统及新型机构等先进技术,能够加工形状复杂、精密、批量零件,并且具有加工精度高、生产效率高、适应性强等特点。随着我国制造业的快速发展,数控机床在机械制造业已得到广泛应用,且对数控机床的精度要求也越来越高。如何检测数控机床的精度,正成为各行业用户在验收与维护数控机床时非常关注的问题。机床的精度主要包括机床的几何精度、机床的定位精度和机床的切削精度。根据我在日常工作中所积累的经验,就这些精度的检测项目、检测方法及注意事项进行综合的说明: 检验目的:了解进行数控机床几何精度检测、加工精度检测常用的工具及其使用方法 检验要求:了解ISO标准、GB中常见的数控机床几何精度及加工精度检测项目标准数据,掌握数控机床几何精度、加工精度检测方法。 检验内容:机床调平、常见几何精度检测、常见加工精度检测 数控车床精度检测 1.床身导轨的直线度和平行度 检验工具:精密水平仪 检验方法:(1)水平仪沿Z 轴向放在溜板上,沿导轨全长等距离在各位置上检验,记录水平仪的读数,并计算出床身导轨在垂直平面内的直线度误差。(2)水平仪沿X 轴向放在溜板上,在导轨上移动溜板,记录水平仪读数,其读数最大值即为床身导轨的平行度误差。2.溜板在水平面内移动的直线度 检验工具:指示器和检验棒,百分表和平尺 检验方法:将直验棒顶在主轴和尾座顶尖上;再将百分表固定在溜板上,百分表水平触及验棒母线;全程移动溜板,调整尾座,使百分表在行程两端读数相等,检测溜板移动在水平面内的直线度误差。 3.主轴跳动 检验工具:百分表和专用装置 检验方法:用专用装置在主轴线上加力 F ( F 的值为消除轴向间隙的最小值),把百分表安装在机床固定部件上,然后使百分表测头沿主轴轴线分别触及专用装置的钢球和主轴轴肩支承面;旋转主轴,百分表读数最大差值即为主轴的轴向窜动误差和主轴轴肩支承面的跳动误差 4.主轴锥孔轴线的径向跳动 检验工具:百分表和验棒 检验方法:将检验棒插在主轴锥孔内,把百分表安装在机床固定部件上,使百分表测头垂直触及被测表面,旋转主轴,记录百分表的最大读数差值,在a、b 处分别测量。标记检棒与主轴的圆周方向的相对位置,取下检棒,同向分别旋转检棒90 度、180 度、270 度后重新插入主轴锥孔,在每个位置分别检测。取4次检测的平均值即为主轴锥孔轴线的径向跳动误差 5.主轴轴线(对溜板移动)的平行度 检验工具:百分表和验棒 检验方法:将检验棒插在主轴锥孔内,把百分表安装在溜板上,然后:(1)使百分表
激光干涉仪在检测数控机床精度方面的应用 1.前言 随着大型数控机床应用的日见广泛,对大型机械两条导轨间平垂直度检测要求也越来越多。传统的垂直度检测方法如大理石角尺配合干分表方法受标准角尺大小的限制只能应用于小型机器:另外采用四象限等传感器方法,则因传感器的精度漂移和读数稳定性容易受到环境变化的影响,使得其应用范围大大受限。 激光干涉仪是通过激光波长溯源的原理来实现数控机床几何精度及定位精度检测,激光干涉仪主要可以对数控机床进行线性、角度、直线度、垂直度、转轴测量等,下面就来一一讲解。 2.测量应用 2.1.线性测量 2.1.1.线性测量构建 要进行线性测量,需使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上,组装成“线性干涉镜”。线性干涉镜放置在激光头和线性反射镜之间的光路上,用它的反射光线形成激光光束的参考光路,另一束光入射到线性反射镜,通过线性反射镜的线性位移来实现线性测量。如下图所示。 线性测量构建图
水平轴线性测量样图垂直轴线性测量样图 2.1.2.线性测量的应用 激光干涉仪可用于精密机床定位精度、重复定位精度、微量位移精度的测量。测量时在工作部件运动过程中自动采集并及时处理数据。 激光干涉仪应用于机密机床校准 2.2角度测量 2.2.1.角度测量构建 与线性测量原理一样,角度测量需要角度干涉镜和角度反射镜,测试时角度反射镜 和角度干涉镜必须有一个相对旋转,相对旋转后两束光的光程差就会发生变化,而光程 差的变化会被激光干涉仪探测器探测出来,由软件将线性位置的变化转换为角度的变化 显示出来。
角度测量原理及测量构建 水平轴俯仰角度测量样图水平轴偏摆角度测量样图 2.2.2.角度测量的应用 机床准直平台/倾斜工作台的测量 由于角度镜组的不同安装方式,其测量结果代表不同方向的角度值。您可以结合实际需要进行安装、测量。
数控机床精度检测项目及常用工具 随着数控技术的进一步推广应用,越来越多的数控机床利用自身带有的测头系统来进行工件、刀具尺寸检测及进行仿形数字化。要知道上述功能的实现,与机床自身的精度密切相关,若机床精度不作定期校准,则谈不上准确地完成上述工作。 雷尼绍ML10激光干涉仪线性位移测量软件可提供按下述标准进行的数据分析:BS4656英国三测机标准;BS3800英国机床标准;ISO 230-2国际标准;VDI/DGQ 3441德国工程师学会机床标准;VDI 2617德国工程师学会三测机标准;NMTBA美国机床协会标准;GB10931-89中国国家标准;ASME B89.1.12M美国机械工程师学会标准;ASME B5.54美国机械工程师学会标准;E60—099法国标准;JISB2330日本国家标准。 2 英国雷尼绍公司先进技术 英国雷尼绍公司是专门从事设计、制造高精度检测仪器与设备的世界性跨国公司。主要产品为三坐标测量机及数控机床用测头、激光干涉仪、球杆仪等,为机械制造工业提供了序前(激光干涉仪和球杆仪)、序中(数控机床用工件测头及对刀测头)和序后(三测机用测头及配置)检测的成系列质量保证手段。她的全部技术与产品都旨在保证数控机床精度,改善数控机床性能,提高数控机床效率,可保证和改善数控机床制造厂工作母机的加工精度与质量,扩大制成品的市场。 2.1ML10激光干涉仪 雷尼绍ML10激光干涉仪为机床检定提供了一种高精度仪器,它精度高,达到±1.1PPM(在0~40℃下),测量范围大(线性测长40m,任选80m),测量速度快(60m/min),分辨率高(0.001μm),便携性好。由于雷尼绍激光干涉仪具有自动线性误差补偿功能,可方便恢复机床精度,更受到用户欢迎! 为使大家进一步了解ML10激光干涉仪在检测数控机床精度方面所具有的独特优点,下面着重介绍ML10激光干涉仪在精度检测中的应用。 (1)几何精度检测可用于检测直线度、垂直度、俯仰与偏摆、平面度、平行度等。 (2)位置精度的检测及其自动补偿可检测数控机床定位精度、重复定位精度、微量位移精度等。利用雷尼绍ML10激光干涉仪不仅能自动测量机器的误差,而且还能通过RS232接口自动对其线性误差
数控机床定位精度检测的方式 目前,由于数控系统功能越来越多,对每个坐喷射器标运动精度的系统误差如螺距积累误差、反向间隙误差等都可以进行系统补偿,只有随机误差没法补偿,而重复定位精度正是反映了进给驱动机构的综合随机误差,它无法用数控系统补偿来修正,当发现它超差时,只有对进给传动链进行精调修正。因此,如果允许对机床进行选择,则应选择重复定位精度高的机床为好。 1.直线运动定位精度检测 直线运动定位精度一般都在机床和工作台空载条件下进行。按国家标准和国际标准化组织的规定(ISO标准),对数控机床的检测,应以激光测量为准。在没有激光干涉仪的情况下,对于一般用户来说也可以用标准刻度尺,配以光学读数显微镜进行比较测量。但是,测量仪器精度必须比被测的精度高1~2个等级。 为了反映出多次定位中的全部误差,ISO标准规定每一个定位点按五次测量数据算平均值和散差-3散差带构成的定位点散差带。 2.直线运动重复定位精度检测 检测用的仪器与检测定位精度所用的相同。一般检测方法是在靠近各坐标行程中点及两端的任意三个位置进行测量,每个位置用快速移动定位,在凯威凯达相同条件下重复7次定位,测出停止位置数值并求出读数最大差值。以三个位置中最大一个差值的二分之一,附上正负符号,作为该坐标的重复定位精度,它是反映轴运动精度稳定性的最基本指标。 3.直线运动的原点返回精度检测 原点返回精度,实质上是该坐标轴上一个特殊点的重复定位精度,因此它的检测方法完全与重复定位精度相同。 4.直线运动的反向误差检测 直线运动的反向误差,也叫失动量,它包括该坐标轴进给传动链上驱动部位(如伺服电动机、伺趿液压马达和步进电动机等)的反向死区,各机械运动传动副的反向间隙和弹性变形等误差的综合反映。误差越大,则定位精度和重复定位精度也越低。 反向误差的检测方法是在所测坐标轴的行程内,预先向正向或反向移动一个距离并以此停止位置为基准,再在同一方向给予一定移动指令值,使之移动一段距离,然后再往相反方向移动相同的距离,测量停止位置与基准位置之差。在靠近行程的中点及两端的三个位置分别进行多次测定(一般为7次),求出各个位置上的平均值,以所得平均值中的最大值为反向误差值。
机械制造装备设计课程模拟试题一 一,选择题(每题3分,共21分) 1.随行夹具的返回型式有上方返回,下方返回和( )三种. (A)直线通过式; (B)折线通过式; (C)水平返回; 2.按照工艺范围,机床可分为( ),专用机床,专门化机床 (A)通用机床; (B)车床; (C) 数控机床; 3.根据数控机床的工作原理,它一般由信息载体,( ),伺服系统,机床本体等四部分组成. (A)伺服电机; (B)加工装备; (C)数控装置; 4.仓储设施的型式按其功能分有原材料库,( ),在制品库,零部件成品库,维修件和备件库,产成品库,工夹量具等工艺装备库等; (A)外购件库; (B)车间级库; (C)厂级库; 5.数控机床电气伺服系统按有无检测和反馈装置分为开环,( )和半闭环系统. (A)电气系统; (B)闭环; (C)液压系统; 6.回转运动导轨的截面形状有三种:平面环形,( )和双锥面导轨. (A)平面形; (B)锥面环形; (C)三角形; 7.钻模按其结构特点可分为( ),回转式钻模,翻转式钻模,盖板式钻模,滑柱式钻模等五种类型. (A)固定式钻模; (B)分离式钻模; (C)可调式钻模; 二,判断题(每题2分,共20分)
1.机械制造装备包括加工装备,机床,仓储输送装备和辅助装备四种,它与制造工艺,方法紧密联系在一起,是机械制造技术的重要载体. ( ) 2.可调支承是支承点位置可以调整的支承.它不起定位作用,主要用于工件的毛坯制造精度不高,而又以粗基准面定位的工序中. ( ) 3.刀具识别装置是自动换刀系统的重要组成部分.常用的有顺序选刀和任意选刀两种型式. ( ) 4.机床间的工件传递和运送装置目前包括有:托盘和随行夹具,有轨小车(RGV)和无轨小车(AGV)等. ( ) 5.导轨按结构型式可分为开式导轨和闭式导轨. ( ) 6.若需要限制的自由度少于六个,定位时正好限制了这几个自由度,则为完全定位. ( ) 7.工业机器人的驱动系统是带动操作机各运动副的动力源,常用的驱动方式包括手动,电动机驱动,液压,气动三种. ( ) 8.在工业机器人中的谐波减速传动装置,具有传动比大,承载能力强,传动精度高,传动平稳,效率高,体积小,质量轻等优点. ( ) 9.在工厂"物流"是指从原材料和毛坯进厂,经过储存,加工,装配,检验,包装,直至成品和废料出厂,在仓库,车间,工序之间流转,移动和储存的全过程. ( ) 10.机械加工生产线主要由加工装备,工艺装备,输送装备,辅助装备和控制系统组成. ( ) 三,简答题(每题6分,共30分) 1.机床夹具功用是什么?主要由哪几部分组成?(6分)
数控机床精度检测项目及常用工具 来源:数控机床网 作者:数控车床 栏目:行业动态 1 前言 对每个工厂来讲,购买数控机床都是一笔相当可观的投资。为使投资的设备在生产中真正发挥中坚作用,保证加工出合格的零件,尽快回收成本是至关重要的。 经验表明,80%以上的机床在安装时必须在现场调试后才能符合其技术指标。因此在新机床验收时,要进行检定,使机床一开始安装就能保证达到其技术指标及预期的质量和效率。 另外经验也表明,80%已投入生产使用的机床在使用一段时间后,处在非正常超性能工作状态,甚至超出其潜在承受能力。因此通常新机床在使用半年后需再次进行检定,之后可每年检定一次。定期检测机床误差并及时校正螺距、反向间隙等可切实改善生产使用中的机床精度,改善零件加工质量,不至于产生废品,大大提高机床利用率。总之,及时揭示机床问题可避免导致机床精度损失及破坏性地使用机床。 随着数控技术的进一步推广应用,越来越多的数控机床利用自身带有的测头系统来进行工件、刀具尺寸检测及进行仿形数字化。要知道上述功能的实现,与机床自身的精度密切相关,若机床精度不作定期校准,则谈不上准确地完成上述工作。 雷尼绍ML10激光干涉仪线性位移测量软件可提供按下述标准进行的数据分析: 4656英国三测机标准; 3800英国机床标准;ISO 230-2国际标准;VDI/DGQ 3441德国工程师学会机床标准;VDI 2617德国工程师学会三测机标准;NMTBA美国机床协会标准;GB10931-89中国国家标准;ASME B89.1.12M美国机械工程师学会标准;ASME B5.54美国机械工程师学会标准;E60—099法国标准;JI 2330日本国家标准。 2 英国雷尼绍公司先进技术 英国雷尼绍公司是专门从事设计、制造高精度检测仪器与设备的世界性跨国公司。主要产品为三坐标测量机及数控机床用测头、激光干涉仪、球杆仪等,为机械制造工业提供了序前(激光干涉仪和球杆仪)、序中(数控机床用工件测头及对刀测头)和序后(三测机用测头及配置)检测的成系列质量保证手段。她的全部技术与产品都旨在保证数控机床精度,改善数控机床性能,提高数控机床效率,可保证和改善数控机床制造厂工作母机的加工精度与质量,扩大制成品的市场。 2.1ML10激光干涉仪 雷尼绍ML10激光干涉仪为机床检定提供了一种高精度仪器,它精度高,达到±1.1 M(在0~40℃下),测量范围大(线性测长40m,任选80m),测量速度快(60m/min),分辨率高(0.001μm),便携性好。由于雷尼绍激光干涉仪具有自动线性误差补偿功能,可方便恢复机床精度,更受到用户欢迎! 为使大家进一步了解ML10激光干涉仪在检测数控机床精度方面所具有的独特优点,下面着重介绍ML10激光干涉仪在精度检测中的应用。 (1)几何精度检测可用于检测直线度、垂直度、俯仰与偏摆、平面度、平行度等。 (2)位置精度的检测及其自动补偿可检测数控机床定位精度、重复定位精度、微量位移精度等。利用雷尼绍ML10激光干涉仪不仅能自动测量机器的误差,而且还能通过RS232接口自动对其线性误差进行补偿,比通常的补偿方法节省了大量时间,并且避免了手工计算和手动数控键入而引起的操作者误差,同时可最大限度地选用被测轴上的补偿点数,使机床达到最佳精度,另外操作者无需具有机床参数及补偿方法的知识。 目前,可供选择的补偿软件有Fanuc,Sieme 800系列,UNM,Mazak,Mitsubishi,Cinci ati Acramatic,Heidenhain, Bosch, Allen-Bradley。 (3)数控转台分度精度的检测及其自动补偿现在,利用ML10激光干涉仪加上RX10转台基准还能进行回转轴的自动测量。它可对任意角度位置,以任意角度间隔进行全自动测量,其精度达±1。新的国际标准已推荐使用该项新技术。它比传统用自准直仪和多面体的方法不仅节约了大量的测量时间,而且还得到完整的回转轴精度曲线,知晓其精度的每一细节,并给出按相关标准处理的统计结果。(4)双轴定位精度的检测及其自动补偿雷尼绍双激光干涉仪系统可同步测量大型龙门移动式数控机床,由双伺服驱动某一轴向运动的定位精度,而且还能通过RS232接口,自动对两轴线性误差分别进行补偿。 (5)数控机床动态性能检测利用RENISHAW动态特性测量与评估软件,可用激光干涉仪进行机床振动测试与分析(FFT),滚珠丝杠的动态特性分析,伺服驱动系统的响应特性分析,导轨的动态特性(低速爬行)分析等。 [1] [2] 下一页 网页查看:数控机床精度检测项目及常用工具 发表评论 相关资讯: 数控机床 1 数控机床电气系统典型故障的原因分析及维护 2 数控机床的网络控制技术研究 3 关于选购进口数控机床的若干问题 4 关于选购进口数控机床的若干问题 5 数控机床加工工艺分析 精度 1 车削轴类工件时的精度分析 2 加工精密主轴时顶尖定位精度的精化方法
最新文件---------------- 仅供参考--------------------已改成-----------word文本 --------------------- 方便更改 一、数控机床的精度检验 数控机床的高精度最终是要靠机床本身的精度来保证,数控机床精度包括几何精度和切削精度。另一方面,数控机床各项性能和性能检验对初始使用的数控机床及维修调整后机床的技术指标恢复是很重要的。 1. 几何精度检验 几何精度检验,又称静态精度检验,是综合反映机床关键零部件经组装后的综合几何形状误差。数控机床精度的检验工具和检验方法类似于普通机床,但检测要求更高。 几何精度检测必须在地基完全稳定、地脚螺栓处于压紧状态下进行。考虑到地基可能随时间而变化,一般要求机床使用半年后,再复校一次几何精度。在几何精度检测时,应注意测量方法及测量工具应用不当所引起的误差。在检测时,应按国家标准规定,即机床接通电源后,在预热状态下,机床各坐标轴往复运动几次,主轴按中等转速运转十多分钟后进行。常用的检测工具有精密水平仪、精密方箱、直角尺、平尺、平行光管、千分表、测微仪及高精度主轴心棒等。检测工具的精度必须比所设的几何精度高一个等级。 以卧式加工中心为例,要对下列几何精度进行检验: 1)X、Y、Z坐标轴的相互垂直度; 2)工作台面的平行度; 3)X、Z轴移动时工作台面的平行度; 4)主轴回转轴线对工作台面的平行度; 5)主轴在Z轴方向移动的直线度; 6)X轴移动时工作台边界与定位基准的平行度; 7)主轴轴向及孔径跳动; 8)回转工作台精度。
2. 定位精度的检验 数控机床的定位精度是表明所测量的机床各运动部位在数控装置控制下,运动所能达到的精度。因此,根据实测的定位精度数值,可以判断出机床自动加工过程中能达到的最好的工件加工精度。 (1)定位精度检测的主要内容 机床定位精度主要检测内容如下: 1) 直线运动定位精度(包括X 、Y 、Z 、U 、V 、W 轴); 2) 直线运动重复定位精度; 3) 直线运动轴机械原点的返回精度; 4) 直线运动失动量的测定; 5) 直线运动定位精度(转台A 、B 、C 轴); 6) 回转运动重复定位精度; 7) 回转轴原点的返回精度; 8) 回转运动矢动量的测定。 (2)机床定位精度的试验方法 检查定位精度和重复定位精度使用得比较多的方法是应用精密线纹尺和读数显微镜(或光电显微镜)。以精密线纹尺作为测量时的比较基准,测量时将精密线纹尺用等高垫按最佳支架(见图5.1)安装在被测部件例如工作台的台面上,并用千分表找正。显微镜可安装在机床的固定部件上,调整镜头使与工作台垂直。在整个坐标的全长上可选取任意几个定位点,一般为5~15个,最好是非等距的。对每个定位点重复进行多次定位。可以从单一方向趋近定位点,也可以从两个方向分别趋紧,以便揭示机床进给系统中间隙和变形的影响。每一次定位的误差值X 可按下式计算: ()()00y y s s X L L ---= 式中 0s ——基准点或零点时显微镜的读数; L s ——工作台移动L 距离后显微镜的读数; 0y 、L y ——相应于0s 和L s 时机床调位读数装置或数码显示装置的读数,对于数
文章编号:1001-2265(2006)11-0060-03 收稿日期:2006-03-15;修回日期:2006-06-19 *基金项目:浙江省科技计划项目(2005E10049) 作者简介:曹永洁(1982)),男,浙江台州人,浙江大学机械制造及其自动化专业硕士研究生,主要研究方向为数控机床误差检测技术相关研究, (E -m ail)donall ove @163.co m 。 数控机床定位精度检测方法比较 * 曹永洁1,2 ,傅建中 1 (1.浙江大学现代制造工程研究所,杭州 310027;2.上海工程技术大学高等职业技术学院,上海 200437) 摘要:评定机床性能的一项重要指标是机床的定位精度大小。文章介绍了两种常用的数控机床定位误差测量方法:一维球列法和激光干涉仪测量法的原理。在分析比较了两种方法的特点后,得出一维球列法在测量机床定位误差时的一些不足。同时,通过对一台数控铣床的测量后,发现激光干涉仪测量法更适合于机床定位精度的快速评定。 关键词:数控机床;定位精度;检测;激光干涉仪中图分类号:TP206+.1 文献标识码:A C o m par ison of L i n ear Positioning A ccuracy M easure m entM ethods i n M achine Tools C AO Yong -jie 1,2 ,F U Ji a n -zhong 1 (1.Depart m ent o fm echan ica lEng i n eeri n g ,Zhejiang U niversity ,H angzhou ,310027Ch i n a ;2.Shangha iUn-i versity of Eng ineeri n g Sc ience Shangha i200437,China)Abst ract :Linear positi o ning accuracy is a sign ificant para m eter i n accessing m ach i n e too ls capability .This pa -per presents t h e pri n ciple o f positi o ning errorsm easure m entm ethods by usi n g 1-D ball array and laser i n terfer -o m eter .A fter characteristic co mparison o f t h is t w o m ethods ,there r 'e so m e deficiency in the 1-D ball array .M ean -w hile ,w e found that t h e latter one is m ore su itable for m easuring m ach i n e too ls li n ear position i n g accuracy after i n specti n g a vertica lm illing m achi n e by usi n g the laser i n terfero m eter . K ey w ords :m ach i n e too ls ;positi o ning accuracy ;m easure m en;t laser i n terfero m eter 0 概述 数控机床精度是影响被加工工件尺寸精度的一个直接原因,提高工件加工精度,首先要提高机床精度,影响数控机床精度的主要因素为机床零部件和结构的几何误差,工件的最终加工精度是由机床刀具与工件之间的相对位移误差决定的[1]。定位精度是指数控工作台部件在要求的终点所达到的实际位置的精度,实际位置与理想位置之间的误差称为定位误差。它包括伺服系统、检测系统、工作台进给系统的误差和工作台导轨的几何误差,它影响加工零件的位置精度。数控机床的定位精度,是评定机床性能的一项重要指标。 在机床几何误差检测时,按照检测设备的结构特点和工作原理,可以把误差检测方法分为两类:第一类是接触式误差测量方法,主要有一维球列法、球柄仪法(DBB )等。经过误差参数辨识后,这类检测方法可以直接测量各个误差元,测量精度高,操作简便,设备成 本低,但该类方法在测量时,由于检测设备与机床相接触,在检测过程中带入了接触变形和磨损等误差。第二类是非接触式误差测量方法,主要有正交光栅检测及分离法、激光干涉测量法等。这类检测方法测量精度高,实时性强,检测速度快,操作界面友好,软件处理系统功能强大,但检测的周期相对较长。本文将分别介绍两类方法的代表:一维球列法和激光干涉仪法[2-5]。 1 一维球列定位误差测量原理 一维球列的结构如图1所示,在刚度很大的杆上,镗一系列尺寸相同的定位孔,在上面粘接一些尺寸相同、球度误差很小的钢球,就构成了一维球列。装在主轴上的三维测头在三个互相垂直方向上同时瞄准球心,以获得三维测头感受球心的位置,即为该球心的测量值。机床沿X 轴运动,三维测头依次测量杆上所有经过高精度激光干涉比较仪标定的钢球,将球心距的 #控制与检测# 组合机床与自动化加工技术
FANUC、OKUMA机床的激光干涉仪检测方法 一、光的相干性 二、激光干涉法测距原理 三、FANUC螺补参数的设定 四、关于FANUC系统正负方向补偿号的计算方法 五、FANUC的检测用程式 六、OKUMA螺补参数的设定 七、OKUMA检测程式 八、检测值输入的方法
一、光的相干性 相長性干涉 當兩個波長相同的光束波形同步射出時,其波峰位置會如下圖 2 一般重合,固稱為“相長性干涉”。在相長性干涉的情況下,輸出波的振幅等於兩個輸入波的振幅之和。 ?相消性干涉 當兩個相干光束波形以180°的相位差異步射出時,一個輸入光束的波峰位置會如下圖3 一般與另一個輸入光束的波谷重合,固稱為“相消性干涉”。在相消性干涉的情況下,兩個輸入波會互相抵消而產生暗淡的光
二、激光干涉法测距原理 图片: 根据光的干涉原理,两列具有固定相位差,而且有相同频率、相同的振动方向或振动方向之间夹角很小的光相互交叠,将会产生干涉现象,如图所示。由激光器发射的激光经分光镜A分成反射光束S1和透射光束S2。两光束分别由固定反射镜M1和可动反射镜M2反射回来,两者在分光镜处汇合成相干光束。若两列光S1和S2的路程差为Nλ(λ为波长,N为零或正整数),实际合成光的振幅是两个分振幅之和,光强最大。当S1和S2的路程差为λ/2(或半波长的奇数倍)时,合成光的振幅和为零,此时光强最小。 激光干涉仪就是利用这一原理使激光束产生明暗相间的干涉条纹,由光电转换元件接收并转换为电信号,经处理后由计数器计数,从而实现对位移量的检测。由于激光的波长极短,特别是激光的单色性好,其波长值很准确。所以利用干涉法测距的分辨率至少为λ/2,
激光干涉仪概述 SJ6000激光干涉仪产品采用美国进口高稳频氦氖激光器、激光双纵模热稳频技术、高精度环境补偿模块、几何参量干涉光路设计、高精度激光干涉信号处理系统、高性能计算机控制系统技术,实现各种参数的高精度测量。通过激光热稳频控制技术,实现快速(约6分钟)、高精度(0.05ppm)、抗干扰能力强、长期稳定性好的激光频率输出,采用不同的光学镜组可以测量出线性、角度、直线度、平面度和垂直度等几何量,并且可以进行动态分析。 SJ6000激光干涉仪产品具有测量精度高、测量速度快、最高测速下分辨率高、测量范围大等优点。通过与不同的光学组件结合,可以实现对直线度、垂直度、角度、平面度、平行度等多种几何精度的测量。在相关软件的配合下,还可以对数控机床进行动态性能检测,可以进行机床振动测试与分析,滚珠丝杆的动态特性分析,驱动系统的响应特性分析,导轨的动态特性分析等,具有极高的精度和效率,为机床误差修正提供依据。 激光干涉仪原理
激光器发射单一频率光束射入线性干涉镜,然后分成两道光束,一道光束(参考光束)射向连接分光镜的反射镜,而第二道透射光束(测量光束)则通过分光镜射入第二个反射镜,这两道光束再反射回到分光镜,重新汇聚之后返回激光器,其中会有一个探测器监控两道光束之间的干涉(见图)。若光程差没有变化时,探测器会在相长性和相消性干涉的两极之间找到稳定的信号。 若光程差有变化时,探测器会在每一次光程变化时,在相长性和相消性干涉的两极之间找到变化信号,这些变化会被计算并用来测量两个光程之间的差异变化。 激光干涉仪功能 1.几何精度检测可用于检测直线度、垂直度、俯仰与偏摆、平面度、平行度等; 2.位置精度的检测及其自动补偿可检测数控机床定位精度、重复定位精度、微量位移精度等; 3.动态性能检测利用动态特性测量与评估软件,可用激光干涉仪进行机床振动测试与分析,滚珠丝杠的动态特性分析,伺服驱动系统的响应特性分析,导轨的动态特性(低速爬行)分析。
数控机床精度检测项目 来源:今日五金网发布时间:2008-02-28 1 前言 对每个工厂来讲,购买数控机床都是一笔相当可观的投资。为使投资的设备在生产中真正发挥中坚作用,保证加工出合格的零件,尽快回收成本是至关重要的。 经验表明,80%以上的机床在安装时必须在现场调试后才能符合其技术指标。因此在新机床验收时,要进行检定,使机床一开始安装就能保证达到其技术指标及预期的质量和效率。 另外经验也表明,80%已投入生产使用的机床在使用一段时间后,处在非正常超性能工作状态,甚至超出其潜在承受能力。因此通常新机床在使用半年后需再次进行检定,之后可每年检定一次。定期检测机床误差并及时校正螺距、反向间隙等可切实改善生产使用中的机床精度,改善零件加工质量,不至于产生废品,大大提高机床利用率。总之,及时揭示机床问题可避免导致机床精度损失及破坏性地使用机床。 随着数控技术的进一步推广应用,越来越多的数控机床利用自身带有的测头系统来进行工件、刀具尺寸检测及进行仿形数字化。要知道上述功能的实现,与机床自身的精度密切相关,若机床精度不作定期校准,则谈不上准确地完成上述工作。 雷尼绍ml10激光干涉仪线性位移测量软件可提供按下述标准进行的数据分析:bs4656英国三测机标准;bs3800英国机床标准;iso 230-2国际标准;vdi/dgq 3441德国工程师学会机床标准;vdi 2617德国工程师学会三测机标准;nmtba美国机床协会标准;gb10931 -89中国国家标准;asme b89.1.12m美国机械工程师学会标准;asme b5.54美国机械工程师学会标准;e60?099法国标准;jisb2330日本国家标准。 2 英国雷尼绍公司先进技术 英国雷尼绍公司是专门从事设计、制造高精度检测仪器与设备的世界性跨国公司。主要产品为三坐标测量机及数控机床用测头、激光干涉仪、球杆仪等,为机械制造工业提供了序前(激光干涉仪和球杆仪)、序中(数控机床用工件测头及对刀测头)和序后(三测机用测头及配置)检测的成系列质量保证手段。她的全部技术与产品都旨在保证数控机床精度,改善数控机床性能,提高数控机床效率,可保证和改善数控机床制造厂工作母机的加工精度与质量,扩大制成品的市场。 2.1ml10激光干涉仪