应用UG后处理构造器定制
海德汉iTNC530五轴加工中心后置程序
陆建军
(江苏省盐城技师学院数控技术系江苏盐城 224002)
【摘要】本文针对德西数控MCV850-5(海德汉iTNC530系统)双转台式五轴联动加工中心机床,介绍了运用UG软件中的后处理开发工具--后处理构造器(UG PostBuilder)定制五轴机床专用后处理一般步骤和方法。
【关键词】多轴加工;NX/后处理构造器;后置处理
近几年,随着数控技术的迅猛发展,特别是一些高、精、尖产品加工技术的需求,使五轴联动数控机床技术应用越来越普遍,对五轴机床人才需求量也在迅速增加。为了紧跟社会与时代对人才培养的要求,盐城技师学院与南京德西数控新技术有限公司共同研发了德西数控MCV850-5双摆台式五轴联动加工中心机床。五轴联动机床的编程离不开CAD/CAM软件的应用,CAD/CAM软件要能产生适合机床加工的程序,后置处理程序是个关键。下面以德西数控MCV850-5机床为例说明五轴后置处理程序的定制过程。
一、德西数控V850-5 post定制的过程
后置处理文件的获得一般由这样两种途径:一是由机床厂商提供或由软件厂商提供。但由于种种原因,很多企业在购买机床或软件时,往往忽略了后置处理文件的购买。单独购买后置处理文件,价格又比较昂贵,基于这样一些原因,部分企业在购买了机床后不能及时得到应用,甚至于造成设备的闲置。二是由专业技术人员根据机床的结构特点和数控系统的控制原理,进行后处理文件的定制开发。定制的一般方法是利用CAD/CAM软件的通用后置处理模块,如:UG软件的后处理构造器(UG Post Builder)模块,powermill软件的PM POST 模块,cimatronE软件的IMSpost模块等,对数控机床的运动方式进行定义,通过对CAD/CAM 软件提供的机床标准控制系统进行修改,得到我们需要的后置处理程序。
1、后处理构造器(Post Builder)介绍
NX/后处理构造器是UG软件提供的一个非常方便的创建和修改后处理工具(如图1所示),用户可以通过NX/后处理构造器图形界面的交互方式来灵活定义建立NC程序的格式和输出内容,以及程序头尾、换刀、循环等每一个时间的处理方式。
图1 后处理构造器
采用NX/后处理构造器建立后处理文件的一般过程:
图2 定制后处理文件的过程
2、德西数控V850-5机床的主要参数
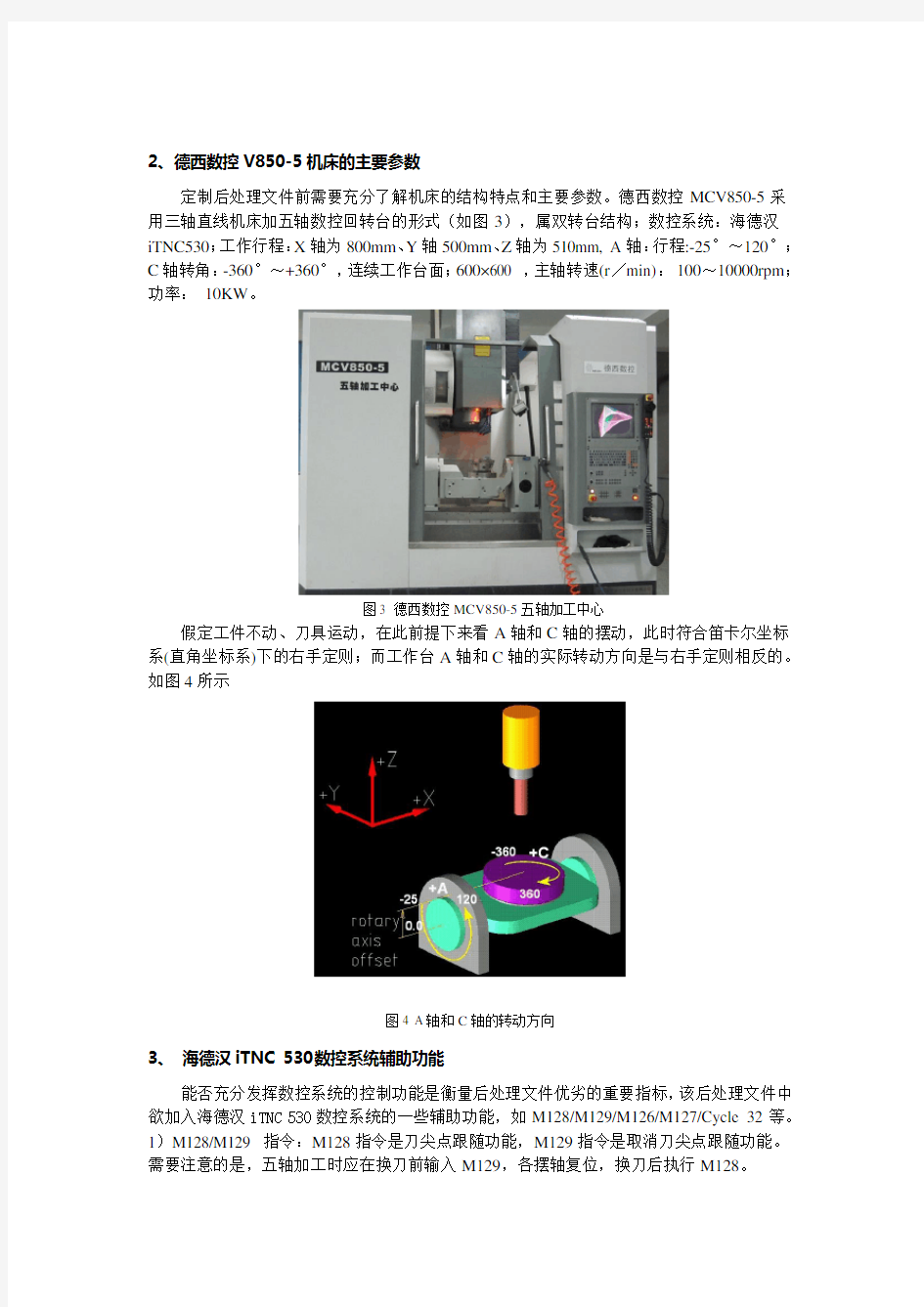
定制后处理文件前需要充分了解机床的结构特点和主要参数。德西数控MCV850-5采用三轴直线机床加五轴数控回转台的形式(如图3),属双转台结构;数控系统:海德汉iTNC530;工作行程:X 轴为800mm 、Y 轴500mm 、Z 轴为510mm, A 轴:行程:-25°~120°;C 轴转角:-360°~+360°,连续工作台面;600×600 ,主轴转速(r /min): 100~10000rpm ;功率: 10KW 。
图3 德西数控MCV850-5五轴加工中心
假定工件不动、刀具运动,在此前提下来看A 轴和C 轴的摆动,此时符合笛卡尔坐标系(直角坐标系)下的右手定则;而工作台A 轴和C 轴的实际转动方向是与右手定则相反的。如图4所示
图4 A 轴和C 轴的转动方向
3、海德汉iTNC 530数控系统辅助功能
能否充分发挥数控系统的控制功能是衡量后处理文件优劣的重要指标,该后处理文件中欲加入海德汉iTNC 530数控系统的一些辅助功能,如M128/M129/M126/M127/Cycle 32等。1)M128/M129 指令:M128指令是刀尖点跟随功能,M129指令是取消刀尖点跟随功能。需要注意的是,五轴加工时应在换刀前输入M129,各摆轴复位,换刀后执行M128。
2)Cycle 32:该指令保证数控系统自动地将两个路径之间的轮廓平滑过渡(无论补偿与否)刀具与工件表面保持接触。
3)M126/M127指令:M126指令是旋转轴短路径运动指令,M127指令是旋转轴取消短路径运动指令。
4、MCV850-5专用后置处理程序的制作
1)设置机床的基本参数
(1)启动NX/后处理构造器程序,新建后置文件,文件名为:MCV850_5。
(2)按图5设置以下参数:选择“后处理输出单位”为毫米,“机床”为铣床,“控制器”选择“heidenhain_conversational”,然后进入用户编辑界面。
图5 新建后处理
(3)设置机床的极限参数
①按图6设置机床的一般参数。选择“机床”标签中的“一般参数”页面,设置机床的线性轴的移动极限以及快速进给极限参数;
图6 设置机床的一般参数
②设置第四轴参数。为防止A轴超程,在“第四轴”页面设置A轴的极限转角最小值为-25、最大值为120;
③设置第五轴参数。选择“第五轴”页面点击“配置”按钮,设置“第五轴”的旋转平面为“XY”,修改“文字指引线”为“C”,选择“退刀/重新进刀”单选框,以防止A轴连续插补过大造成反旋转向过切。
2) 定义程序头、刀轨移动部分、程序尾。
(1)进入→程序→程序起始序列
在“程序开始”程序块里添加程序名、毛坯大小、取消最小角度转动功能与取消TCPM
功能。如图7所示:
图7
(2) 进入→操作起始序列→初始移动
在“操作起始序列”程序块里添加刀具、启动M126、TCPM (M128)、公差等,如图
8所示:
图8
(3) 进入→刀轨→运动→设定刀轨移动关系
①设定“线性移动”,如图9所示:
图9
编辑X并设定表达式为$mom_alt_pos(0)
编辑Y并设定表达式为$mom_alt_pos(1)
编辑Z并设定表达式为$mom_alt_pos(2)
②设定“圆周移动”,如图10:
图10
编辑X并设定表达式为$mom_alt_pos_arc_center(0) 编辑Y并设定表达式为$mom_alt_pos_arc_center(1) 编辑Z并设定表达式为$mom_alt_pos_arc_center(2) ③设定“快速移动”,如图11所示:
图11 rap1 表达式为$mom_alt_pos(0)
rap2 表达式为$mom_alt_pos(1)
rap3 表达式为$mom_alt_pos(2)
A 表达式为$mom_out_angle_pos(0)
C 表达式为$mom_out_angle_pos(1)
4)设定程序结束前的机床动作,如图12:
图12
5)设定“程序结束”,如图13:
图13
最后保存退出,在保存目录下会生成这三个文件分别是:MCV850_5.def 、 MCV850_5.tcl 、
MCV850_5.pui ,利用后处理构造器中的实用程序下的“编辑模板后处理数据文件”命令编辑template_post.dat 文件,如图14所示。编辑template_post.dat 时有个小技巧,如本例中需添加MCV850_5的后处理,只要点击“new ”按钮,然后浏览选择MCV850_5.pui ,就会自动添加,非常人性化。
图14
5.后处理程序验证
如15图,采用UG 多轴加工模块,对图示叶片零件进行加工,产生刀轨。
图15
刀轨生成后选择已经编写好的后置处理文件(MCV850_5)产生NC 程序如下:
BEGIN PGM 100 MM
BLK FORM 0.1 Z X0.0 Y0.0 Z-20.
BLK FORM 0.2 X100. Y100. Z0.0
M127
M129
TOOL CALL 1 Z S3000
M126
M128 F5000
CYCL DEF 32.O TOLERLANCE
CYCL DEF 32.1 T0.005
CYCL DEF 32.1 TA0.05 L X121.08 Y33.056 FMAX M3 L Z224.955 L X67.18 Y8.72 Z33.899 FMAX L F250. L X67.068 Y8.725 Z33.247 F250. M8 L X67.095 Y8.898 Z32.61 L X67.258 Y9.219 Z32.056 ...... ...... L X58.544 Y4.401 Z12.93 A-15.273
DMG培训照片文件整理总结(详见机床操作说明书) 目录: 一.手动拆刀和装刀: 1.进入手动模式。 2.按刀具表软件,进入刀具表。 3.打开编辑开关。 4.建刀库刀位以外的刀具。 5.按结束。 6.进入MDI模式。 7.调用刚建立的刀具。 8.按START键执行。 9.显示更换刀具。 10.按开门键,打开工件间门。 11.按换刀键。 12.屏幕T 开始闪烁。 13.旋转按刀按扭,听到有松夹声音。 14.注意刀具的缺口方向,放刀具到位,松开换刀按扭,听到夹紧的声音,松开刀具。 15.刀具在主轴。 16.关闭工作间的门。 17.屏幕显示更换刀具。 18.刀具已经换入。 19.确认换刀完成。 20.换刀结束, 二.手动拆除刀库以外的刀具。 1.按MDI 进入 2.调用零号刀具。 3.按START 键执行。 4.屏幕显示从轴上取下刀具。 5.按开门键开工作间门。 6.按换刀键。 7.屏幕T 开始闪烁。 8.用手拿住刀具。 9.旋转拆刀旋扭,拆除刀具。 10.关闭工作间的门。 11.屏幕显示 T0 。 12.屏幕显示从轴人取下刀具,按START 键完成拆刀。 三.从刀库装入刀具。 1.按手动按扭,进入手动数据输入。 2.按刀具表软键,进入刀具表。 3.把光标移到要装入刀具的一行。 4.按左边的刀库管理软键。 5.按刀具拆除, 6.等待屏幕显示 1。20(1号刀库,20号刀位),刀库已经准备好。 7.因为只是装刀,并不是真正拆除,所以按中断结束。 8.打开后面的刀库门,放入刀具,注意缺口方向在里面,完成刀库装刀。
2.把光标移到要拆除的刀具的一行。 3.按刀具管理软键。 4.按刀具拆除。 5.屏幕显示(1。32)一号刀库32号刀位。 6.按中断软键,不清除刀具参数。 7.打开刀库门,拆除刀具。 8.手动清除刀具数据,按结束,完成刀库拆除刀具。 五.标准刀的校正Z零点。 1.把标准刀放入32号刀位。按MDI 进入。 2.调用32号刀具。 3.按START 执行。 4.调入标准刀具。 5.在刀具表中输入,标准刀的长度和半径。 6.移动标准刀在工作台上方50MM 处。用50MM的标准块测量,精度到0。001MM。 7.进入设定原点界面。 8.按设定原点软键。 9.输入Z+50 10.按ENT 键确认。 11.按预设表软键,进入。 11.进入预设表 12.把工作台设为Z零点。标准刀的校正Z零点完成 (工作台有-0。0397的误差,会在后面,五轴精度校准中校正) 探头校正方法 1. 用基准刀找到机床工作台面的机械坐标.(用50mm标准块) 2. 调出探头,把探头移动到距离工作台面20MM的地方,执行探头长度标定(该选项在打开探头功能看到两个标定的第一项)。标定完成后会看到探头的实际自动的写到刀具补偿里面。 3. 用机床配置的内径为50的环规做探头摆动的标定。做法为把探针动到环规的上表面-10MM左右的地方执行探头半径标定,{该选项在打开探头功能看到两个标定的第一项}(做这项这前要用千分表测出探头放在主轴上的摆动值不能超过5μm如果摆动太大要用装探头的木盒配的六角匙调整探头下表面的四个螺母,调整后探头的摆动越少越好) 六.探头直径校正 1.调用探头,用丝表校探头最高点在0。005MM以内,在刀具表中建立探头数据,L (探头长度)R(探头半径)和PLC参数00010100。 2.如果探头不正,用六角松开校正。 2.用铜棒或木棒轻轻敲击校正。 4,校正好后,按探测功能软键。 5.选择标定R功能。 6.把探头移到环规的中心。 7.记录环规的直径。 8.输入环规的半径和探头的半径。 9.按+X 软键,确定方向。 10.按START 执行测量。 11.屏幕显示X+的测量数据。 12.按START 键执行下面的测量。 13.按180 度软键, 14.START 执行 15.完成测量
1前言
1.1TNC 426,TNC 430 HEIDENHAIN TNC是一种面向生产车间的仿型控制器,使您能以一种便于使用的对话式编程语言,编制使机床准确加工运转的对话式程序。TNC控制器可用于铣削、钻孔和镗削加工,也可用于加工中心。TNC 426最多可控制五根轴;TNC 430最多可控制九根轴。您也可在程序控制下改变主轴的角度位置。 一体化的硬盘能存储许多您所喜欢的程序,不论这些程序是脱机创建的还是数字化的。为了能快速计算,随时随地都能在屏幕上调出袖珍计算器。 键盘和屏幕布局清晰合理,功能调用快捷,使用方便。 编程:HEIDENHAIN对话式和ISO格式 HEIDENHAIN对话式编程是一种特别容易的程序写入方法,交互式的图形表示仿型编程的各个加工步骤。如果某一张生产图纸没有标注NC适用的尺寸,HEIDENHAIN FK任意形状轮廓编程就会自动执行必要的计算。工件的加工状况,无论是现在正在加工中还是在加工之前,都能用图形模拟显示。在ISO编程格式或DNC模式中都由此功能。 当TNC在运行另一段程序时,您也可输入或测试一段程序。 兼容性 TNC能执行所有写在TNC 150B及以后的HEIDENHAIN 控制器上的零件程序。
1.2可视显示器和键盘 可视显示器 TNC显示器可使用CRT彩色显示器(BC120)或TFT 液晶显示器(BF120)。右上图为BC120的键盘和控制器,右中图为BF120的键盘和控制器。 屏幕端部 当TNC接通电源时,屏幕端部显示选定的操作方式:左侧为加工方式,右侧为编程模式。当前激活的模式显示在一个较大的方框中,在此方框中,同时也显示对话提示和TNC信息(如果没有,则仅显示图形)。 软键 TNC底部一排软键表示辅助功能。直接按下这些键,即可选用这些辅助功能。紧接着软键行上面的行表示软键的编号,可以左右移动黑色光标调用。 被激话的软键行高亮显示。 软键选择键 切换软键行 设置屏幕布局 用于转换加工和编程模式的移位键 仅在BC120上的键 屏幕退磁:为屏幕设置退出主菜单 为屏幕设置选择主菜单: 在主菜单中:高亮显示部向下移动 在子菜单中:减小数值;图形向左或向下移动 在主菜单中:选择子菜单 在子菜单中:退出子菜单 主菜单对话功能 CONTRAST调节对比度 H-POSITION调节水平位置
百度文库 - 让每个人平等地提升自 我 NC 软件 340 420-xx 用户手册 HEIDENHAIN 会话格式
可视显示器上的控制器 切换屏幕布局 在加工或编程模式之间切换 选择屏幕上功能的软键 切换软键行 输入字母和符号的打字键盘 文件名 注释 ISO 程序机床操作模式 手动操作 电子手轮 通过MDI进行定 位单步程序运行 连续程序运行 编程模式 编程和编辑 试运行 程序/文件管理器TNC功能 选择或删除程序或文件 外部数据传输在程序中 输入程序调用 MOD功能 显示NC错误信息的帮助文本 袖珍计算器 移动高亮区直接到程序块循环和参数功能 移动高亮区 直接到程序块循环和参数功能 进给速度/主轴速度倍率控制旋钮编程路径移动 切入/切出轮廓 FK自由轮廓编程 直线 圆的中心/极坐标极心 圆及圆心 圆及半径相切连 接的圆弧 倒角 圆角 刀具功能 输入和调用刀具长度和半径 循环子程序和程序段重复 定义和调用循环 输入和调用子程序和程序段重复标号程序中间程序停止在程 序中输入探头功能 坐标轴和编号输入和编辑 选择坐标轴或输入坐标轴到程 序中编号 小数点 改变算术符号 极坐标 增量尺寸 Q参数 捕捉实际位置 跳过对话问题删除字 确认输入并恢复对话 结束块 清除数字输入或清除TNC错误信息 中止对话删除程序段
百度文库 - 让每个人平等地提升自我 TNC 型号软件和特性 本手册说明了TNC按以下NC软件号提供的功能和特性 TNC型号NC软件号 iTNC 530 340 420-xx iTNC 530E 340 421-xx 后缀E表示TNC的出口版本TNC的出口版本具有以下限制 可同时在不超过4个轴上进行直线移动 机床制造商通过设置机床参数修改机床TNC可用特性本手册中描述的一些功能可能在您的机床上没有提供 您的机床上可能没有提供的TNC功能包括 3维探头探测功能 使用TT 130进行刀具测量 攻丝刚性 在中断后返回轮廓 请与您的机床制造商联系以熟悉您的机床的特性 许多机床制造商以及HEIDENHAIN提供TNC的编程课程我们推荐这些课程因为这是提高您的编程能力和与其他TNC用户共享信息和想法的有效途径 探头循环用户手册 在另外手册中描述了所有探头功能如果需 要该用户手册的拷贝请与HEIDENHAIN联 系手册ID编号369 280-xx 使用地点 TNC遵守EN55022规范对A类设备的限制并主要用于工业化区域
HEIDENHAIN 德国【HEIDENHAIN】公司主要产品:HEIDENHAIN编码器、HEIDENHAIN光栅尺、HEIDENHAIN 封闭式光栅尺、HEIDENHAIN敞开式光栅尺、HEIDENHAIN长度计、HEIDENHAIN旋转编码器、HEIDENHAIN角度编码器、HEIDENHAIN光栅、HEIDENHAIN数控系统等。 HEIDENHAIN海德汉公司是一家研发、生产和销售高质量直线光栅尺和角度编码器,旋转编码器,数显装置和数控系统的制造商。HEIDENHAIN海德汉公司产品主要用于精密机床和电子元件的生产和加工设备。HEIDENHAIN公司的丰富经验、技术开发和制造的测量设备和数字控制,为工厂和生产的自动化奠定了基础和开拓了未来。德国HEIDENHAIN产品的应用范围十分广泛,几乎覆盖各行各业。HEIDENHAIN产品在中国钢铁及汽车等行业使用非常广泛,HEIDENHAIN系列产品广泛用于各大钢铁行业,HEIDENHAIN系列产品以其卓越的铸造工艺,多年来成熟稳定的品质,HEIDENHAIN长期以来对品质的严谨求精和不断创新的精神,成为众多同类产品中的佼佼者,受到广大用户的一致认可。德国HEIDENHAIN广泛应用于钢铁,汽车、机床、生产设备、自动化机器等领域。 德国海德汉公司在2001年成立了中国的子公司。由于海德汉公司有着几十年的精湛的技术和管理经验,使得我们能为中国市场提供优质的海德汉产品以及完善的服务。一流的技术、产品和服务使得海德汉在中国市场的业务发展非常迅速,目前我们的客户已经遍及全国工业、科研和教育等许多不同的领域。海德汉中国为了更进一步贴近客户的需求,海德汉中国按照德国海德汉的生产技术、管理经验和质量标准,这确保了海德汉德国的品质要求和服务理念在中国的贯彻和实施。为客户提供最优质的服务、品质最优良的产品。成为广大客户在发展各自事业过程中最紧密的伙伴。 HEIDENHAIN封闭式光栅尺 海德汉的封闭式光栅尺能有效防尘、防切屑和防飞溅的切削液,是用于机床的理想选择。铝质外壳和密封软条可以保护光栅尺、扫描单元和轨道免受灰尘、切屑和切削液的影响。扫描单元的运动轨道摩擦力很小,轨道内置在光栅尺上。它通过一个连轴器与外部的安装架连接,这个连轴器可以补偿光栅尺和机器轨道之间不可避免的对正误差。. 封闭式光栅尺的结构有标准光栅尺外壳适用于振动频率高且最大测量长度为30米,还有紧凑光栅尺外壳适用于安装空间小,最大测量长度为2040毫米。 HEIDENHAIN敞开式直线光栅尺 敞开式直线光栅尺设计用于需要高精度测量的机床和系统 典型应用包括: 半导体工业的测量和生产设备 PCB电路板组装机 超精密机床 高精度机床 测量机和比较仪,测量显微镜和其它精密测量设备 直接驱动 HEIDENHAIN长度计 海德汉的增量式长度计能在一个长的测量范围内提供很高的精度。这些坚固耐用的长度计根据不同的应用有不同的产品类型。他们在度量行业有广泛的应用,多点测量站、测试设备检测和位置测量装置。 选择海德汉公司的长度计的理由。
125 6.4 仿型路径—直角座标 路径功能的概述 直线L 直线 直线终点座标 倒角:CHF 两条直线交点处倒角 倒角边长 圆心CC 刀具不移动 圆心或极心座标 圆C 围绕圆心CC 圆弧移动到圆弧终点 圆弧终点座标,转动方向 圆弧CR 确定半径的圆弧 圆弧终点座标,圆弧半径,转动方向 圆弧CT 和前后型面切线连接的圆弧移动 圆弧终点座标 圆角RND 和前后型面切线连接的圆弧移动 修圆的圆角半径 FK 自由编程 和前一个型面任意连接的直线或者圆弧移动 参阅144页“仿型路径—FK 自由仿型编程”
126 直线L 刀具沿着直线从当前位置移动到直线结束点,该直线的起始点为前一行程序的结束点。 直线结束点的座标 必要时进一步输入: 半径补偿RL/RR/R0 进给率F 辅助功能M NC 程序实例 实际位置归零 您也可用ACTUAL-POSITION-CAPTURE (实际位置归零)键建立直线程序行: 在手动操作模式中,把刀具移动到您要归零的位 置上。 屏幕显示切换到编程和编辑。 选定您要插入L 程序行位置的前一程序行。 按下实际位置归零键:TNC 用当前 的实际位置的座标建立一行程序。, 在MOD 功能中,规定保存在L 程序行中的轴的数量(参阅398页“MOD 功能)。
在两条直线之间插入倒角CHF 倒角功能可以使您切去两条直线交点处的尖角。 ?CHF前后的程序行必须是在同一个平面中的。 ?CHF前后的半径补偿必须相同。 ?内倒角必须足够大,以能容纳在用的刀具。 倒角边长:倒角长度 必要时进一步输入: 进给率F(只在CHF程序行中有 效)。 NC程序行实例 ?您不能用CHF程序行开始仿 型。 倒角只能在加工面中。 尖角被修平,不作为轮廓的一 部分。 CHF程序行中编程的进给率只 对该程序行有效,在CHF程序行以 后,原先编程的进给率恢复有效。 127
ON At SC.END SC 号菜单(其它参数一般不用设置)号菜单(其它参数一般不用设置)加大数值,曲线则陡。页码 标准编号 参数 名称 参数值 备注 ﹟0。**号菜单 0?03 加速斜率 0.5cm/s2 0?04 减速斜率 0.6cm/s2 ﹟1。**号菜单 1.06 为最高速度限值 一般设置为电机额定转速 ﹟2。** ﹟3。** 3.05 零速阀值 2 很重要,直接影响停车舒适感 3.08 超速限值 此值自动生成,根据1.06 3.25 编码器相位角 整定出的相位角,U V W 的位置 3. 29 变频器编码器位置 此参数很重要,自学习后断电送电检查是否改变 3.33 编码器转位 0 3.34 编码器脉从数 2048 3.36 编码器电压 5v 3.37 300 3.38 编码器的类型 3.39 编码器终端选择 1 3.40 错误检测级别 1 3.41 编码器自动配置 ﹟4。**号菜单(其它参数不用设置) 加大数值,曲线则陡。
页码 标准编号4.07 对称电流限值200% 4.11 转矩方式选择4 4.12 电流给定滤波器12ms降低电机噪音 4. 13 电流环比例增益自学习生成 4.14 电流环积分增益自学习生成 4.15 电极热时间常数89 4.23 电流给定滤波器110ms降低电机噪音, ﹟5。**号菜单(其它参数不用设置) 5.07 电机额定电流 A按铭牌设定 5.08 电机额定速度 Rmp按铭牌设定 5.09 电机额定电压 380V 5.11 电机极数 20 5.18 PWM开关频率选择 6K HZ ﹟6。**号菜单(不用设置) ﹟7。**号菜单(不用设置) 7.10=0 7.14=0 ﹟8。**号菜单(其它参数不用设置) 8.21 24端子功能选择10.02 运行使能(10.02变频器工作)8.22 25端子输入源18.38 相当于我们主板的多端速输出Y15 8.23 26端子输入源18.37 相当于我们主板的多端速输出Y14 8.24 27端子功能选择19.44 顺时针旋转(上升)8.25 28端子功能选择18.44 逆时针旋转(下降)可以通过18.45=1 改变运行方向 8.26 29端子输入源18.36 相当于我们主板的多端速输出Y13 8.31 24端子输入(出)选择ON 0:输入功能1:输出功能8.3225端子输入(出)选择OFF 0:输入功能1:输出功能﹟16**菜单(其他参数不用设置)
Heidenhain海德汉编码器 旋转编码器 (带内置轴承,采用定子联轴器安装) ERN 1000 (微型) ExN 400 (小型) ExN 100 (大直径轴) ExN 1100 (内置马达中) ExN 1300 (内置马达中) (带内置轴承、采用分离联轴器的旋转编码器) ROC/ROQ/ROD 400 (标准尺寸) ROD 1000 (微型) (无内置轴承) ECI/EQI 1300 (机械兼容ECN/EQN 1300) ERO 1200 (小型) ERO 1400 (微型) ECI/EQI 1100 (机械兼容ECN/EQN 1100) 角度编码器(带内置轴承) RCN (绝对式测量) RON (增量式测量) ROD (增量式测量) ECN (绝对式测量) (无内置轴承) ERP 880 ERP 4080 ERP 8080 ERO 6080 ERO 6070 ERO 6180 ERA 4280C ERA 4480C ERA 4880C ERA 4282C ERA 7480C ERA 8480C 模块式磁栅编码器 ERM 200 ERM 2200 ERM 2410 ERM 2200 ERM 2400 ERM 2900 编码器,海德汉编码器常用的都有:ERN1331-1024, ERN1331-2048, ERN1381-2048,ERN1387-2048, ROD431-1024, ROD431-2048, EQN1325-2048, ROD320-2000, ROD320-2500 海德汉编码器常用的都有:ERN1331-1024, ERN1331-2048, ERN1381-2048,ERN1387-2048, ROD431-1024, ROD431-2048, EQN1325-2048, ROD320-2000, ROD320-2500 优势供应德国heidenhain编码器 610系列632系列674系列,675系列,684系列,685系列,510系列 312系列,560系列,562系列,540系列,541系列525系列,310系列,320系列 优势供应德国heidenhain编码器 ERN1381.001-2048, ID: 313453-06, 313453-02 EQN1125.030 Heidenhain Endoder海德汉编码器 ERN1381.020-2048, ID: 385489-06 EQN1325.020-2048, ID: 538234-01 ERN1381-2048, ID:385489-56 EQN1325, ID: 312214-53 ERN1381.040-2048, ID:608290-01 EQN1325.001-2048, ID312214-16 ERN1381.062-2048, ID: 385489-08, 385489-07 EQN1325-2048, ID:538234-51 ERN1387.001-2048, ID:312215-14 EQN1325-2048 ID:515385-01 ERN1387.001-2048.ID:312215-02, 312215-66 EQN1325.048-2048, 655251-01 ERN1387-2048, ID:373787-N6 EQN425,ID:312214-16 海德汉研制生产光栅尺、角度编码器、旋转编码器、数显装置和数控系统。海德汉公司的产品被广泛应用于机床、自动化机器,尤其是半导体和电子制造业等领域。 编码器的性能对电机的重要特性具有决定性影响, 例如: 1. 定位精度 2. 速度稳定性 3. 带宽, 它决定驱动指令的响应时间和抗干扰性能 4. 功率损耗 5. 尺寸 6. 噪声 海德汉(HEIDENHAIN) 产品线丰富, 能为各种旋转电机和直线电机提供恰当的解决方
HEIDENHAIN TNC426 TNC430 软件编号 280-476XX 280-477XX 使用说明书 对话式编程
可视显示器上的控制器 分割屏幕 切换加工和编程模式 屏幕上选择功能的软键 变换软键行 改变屏幕设置(仅BC120)输入字符的键盘 文件名称 注解 ISO 编程 机床运转模式 手动操作方式 电控手轮 MDI定位 单行程序运行 全序列程序运行 编程模式 编程和编辑 试运行 程序/文件管理,TNC功能 选择或删除程序和文件,外部数据传送 在程序中输入程序调用命令 MOD功能 显示NC出错信息帮助文本 袖珍计算器 移动光标,直接指向程序行、循环和参数功能 移动高亮显示部 直接转到程序行、循环和参数功能 进给率和主轴转速修调旋钮 编程路径移动 仿型进刀和退刀 FK自由仿型编程 直线 圆心和极座标极心 定圆心圆 定半径圆 切线连接圆弧 倒角 修圆尖角 刀具功能 输入和调用刀具长度和半径 循环、子程序和程序段重复 定义和调用循环 输入和调用子程序及程序段重复 的标签 程序中程序停止运行 在程序中输入触头功能 座标轴和数字,编辑 … 选择座标轴或在程序中输入 座标轴 … 数字键 小数点 改变代数符号 极座标 增量座标 Q参数 实际位置归零 跳过对话提问,删除字 确认输入和恢复对话 结束程序行 清除数字输入或者TNC出错信息 中断对话,删除程序段
TNC 型号,软件和性能 本说明书按照下述NC软件编号,叙述了TNC 提供的功能和特性。 TNC型号NC软件编号 TNC 426 CB,TNC 426 PB 280 476-xx TNC 426 CF,TNC 426 PF 280 477-xx TNC 426 M 280 476-xx TNC 426 ME 280 477-xx TNC 430 CA,TNC 430 PA 280 476-xx TNC 430 CE,TNC 430 PE 280 477-xx TNC 430 M 280 476-xx TNC 430ME 280 477-XX 后缀E和F表示TNC的出口版本,有下列限制: ?线性轴联动不超过四轴。 机床制造商要根据设定的机床参数,对其制造的机床的TNC 配上适用功能。本说命书叙述的某些功能可能不包括在您的机床 所具备的功能之中。 在您的机床上可能有下例不可使用的功能: ?三维触头探测功能。 ?数字化选择。 ?TT130刀具测量装置。 ?强力攻丝。 ?中断后返回仿型。 为使您熟悉您的机床的功能,请联系机床制造商。 许多机床制造商,包括HEIDENHAIN在内,都提供有关TNC 的编程方法。我们推荐采用这些方法来提高您编程的熟练程度, 以及和其他TNC使用者一起共同探讨有关资料和概念。 ?触头循环说明书 触头的全部功能在另一单独的说明书中叙述。如 果用户需要此说明书,请和HEIDENHAIN联系,ID 编号为:329 203-xx。 使用场所 根据EN55022文件规定,TNC遵守有关A级设备的限定,规 定只能在工业范围内使用。 I
NC 软件 340 420-xx 用户手册 HEIDENHAIN 会话格式
可视显示器上的控制器 切换屏幕布局 在加工或编程模式之间切换 选择屏幕上功能的软键 切换软键行 输入字母和符号的打字键盘 文件名 注释 ISO 程序 机床操作模式 手动操作 电子手轮 通过MDI进行定 位单步程序运行 连续程序运行 编程模式 编程和编辑 试运行 程序/文件管理器TNC功能 选择或删除程序或文件 外部数据传输在程序中 输入程序调用 MOD功能 显示NC错误信息的帮助文本 袖珍计算器 移动高亮区直接到程序块循环和参数功能 移动高亮区 直接到程序块循环和参数功能 进给速度/主轴速度倍率控制旋钮 编程路径移动 切入/切出轮廓 FK自由轮廓编程 直线 圆的中心/极坐标极心 圆及圆心 圆及半径相切连 接的圆弧 倒角 圆角 刀具功能 输入和调用刀具长度和半径 循环子程序和程序段重复 定义和调用循环 输入和调用子程序和程序段重复标号 程序中间程序停止在程 序中输入探头功能 坐标轴和编号输入和编辑 选择坐标轴或输入坐标轴到程 序中编号 小数点 改变算术符号 极坐标 增量尺寸 Q参数 捕捉实际位置 跳过对话问题删除字 确认输入并恢复对话 结束块 清除数字输入或清除TNC错误信息 中止对话删除程序段
TNC 型号软件和特性 本手册说明了TNC按以下NC软件号提供的功能和特性 TNC型号NC软件号 iTNC 530 340 420-xx iTNC 530E 340 421-xx 后缀E表示TNC的出口版本TNC的出口版本具有以下限制 可同时在不超过4个轴上进行直线移动 机床制造商通过设置机床参数修改机床TNC可用特性本手册中描述的一些功能可能在您的机床上没有提供 您的机床上可能没有提供的TNC功能包括 3维探头探测功能 使用TT 130进行刀具测量 攻丝刚性 在中断后返回轮廓 请与您的机床制造商联系以熟悉您的机床的特性 许多机床制造商以及HEIDENHAIN提供TNC的编程课程我们推荐这些课程因为这是提高您的编程能力和与其他TNC用户共享信息和想法的有效途径 探头循环用户手册 在另外手册中描述了所有探头功能如果需 要该用户手册的拷贝请与HEIDENHAIN联 系手册ID编号369 280-xx 使用地点 TNC遵守EN55022规范对A类设备的限制并主要用于工业化区域
位置检测装置作为数控机床的重要组成部分,其作用就是检测位移量,并发出反馈信号与数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件使其向着消除偏差的方向运动,直至偏差等于零为止。为了提高数控机床的加工精度,必须提高检测元件和检测系统的精度。其中以编码器,光栅尺,旋转变压器,测速发电机等比较普遍,下面主要对光栅和编码器进行说明。 光栅,现代光栅测量技术 简要介绍: 将光源、两块长光栅(动尺和定尺)、光电检测器件等组合在一起构成的光栅传感器通常称为光栅尺。光栅尺输出的是电信号,动尺移动一个栅距,输出电信号便变化一个周期,它是通过对信号变化周期的测量来测出动就与定就职相对位移。目前使用的光栅尺的输出信号一般有两种形式,一是相位角相差90度的2路方波信号,二是相位依次相差90度的4路正弦信号。这些信号的空间位置周期为W。下面针对输出方波信号的光栅尺进行了讨论,而对于输出正弦波信号的光栅尺,经过整形可变为方波信号输出。输出方波的光栅尺有A 相、B相和Z相三个电信号,A相信号为主信号,B相为副信号,两个信号周期相同,均为W,相位差90o。Z信号可以作为较准信号以消除累积误差。 一、栅式测量系统简述 从上个世纪50年代到70年代栅式测量系统从感应同步器发展到光栅、磁栅、容栅和球栅,这5种测量系统都是将一个栅距周期内的绝对式测量和周期外的增量式测量结合了起来,测量单位不是像激光一样的是光波波长,而是通用的米制(或英制)标尺。它们有各自的优势,相互补充,在竞争中都得到了发展。由于光栅测量系统的综合技术性能优于其他4种,而且制造费用又比感应同步器、磁栅、球栅低,因此光栅发展得最快,技术性能最高,市场占有率最高,产业最大。光栅在栅式测量系统中的占有率已超过80%,光栅长度测量系统的分辨力已覆盖微米级、亚微米级和纳米级,测量速度从60m/min,到480m/min。测量长度从1m、3m达到30m和100m。 二、光栅测量技术发展的回顾 计量光栅技术的基础是莫尔条纹(Moire fringes),1874年由英国物理学家 L.Rayleigh首先提出这种图案的工程价值,直到20世纪50年代人们才开始利用光栅的莫
10 BEGIN PGM MAXXTRON-TEST MM 紅字是程式名 11 BLK FORM 0.1 Z X-60. Y-50. Z-59.992 工件大小 12 BLK FORM 0.2 X60. Y50. Z0.2 13 L Z0. R0F8000 M91 M31 回Z軸機械座標0mm位置 14 CYCL DEF 247 DATUM SETTING Q339=1座標系宣告 ; DATUM NUMBER 15 ; 16 CYCL DEF 7.0 DATUM SHIFT 座標系偏移 17 CYCL DEF 7.1 X0.0 18 CYCL DEF 7.2 Y0.0 19 CYCL DEF 7.3 Z0.0 20 ; 21 ; TOOL TYPE : BALLNOSED 刀具型式 22 ; TOOL ID : 1 刀號 23 ; TOOL DIA. 6. LENGTH 30. 刀直徑與刀長 24 ; 25 TOOL CALL 1 Z S12000 DL+0.0 DR+0.0 呼叫1號刀轉速12000 26 ; Q1= 350 ; PLUNGE FEEDRATE 緩降進給 Q2= 3500 ; CUTTING FEEDRATE 切削進給 Q3= 5000 ; SKIM FEEDRATE 快速位移 27 ; 28 CYCL DEF 32.0 TOLERANCE 高速高精度宣告 29 CYCL DEF 32.1 T0.005 公差0.005 30 CYCL DEF 32.2HSC-MODE:0 精修模式 31 L M3 主軸正轉 32 ; 33 TCH PROBE 583 TOOL SETTING LEN ~ 測刀程式
13编码器单圈精度35 编码器脉冲数编码器的波特率编码器电压ON At SC.END SC 号菜单(其它参数一般不用设置)号菜单(其它参数一般不用设置)加大数值,曲线则陡。页码 标准编号 参数 名称 参数值 备注 ﹟0。**号菜单 0?03 加速斜率 0.5cm/s2 0?04 减速斜率 0.6cm/s2 ﹟1。**号菜单 1.06 为最高速度限值 一般设置为电机额定转速 ﹟2。** ﹟3。** 3.05 零速阀值 2 很重要,直接影响停车舒适感 3.08 超速限值 此值自动生成,根据1.06 3.25 编码器相位角 整定出的相位角,U V W 的位置 3. 29 变频器编码器位置 此参数很重要,自学习后断电送电检查是否改变 3.33 编码器转位 3.34 2048 3.36 5v 3.37 300 3.38 编码器的类型 3.39 编码器终端选择 1 3.40 错误检测级别 1 3.41 编码器自动配置 ﹟4。**号菜单(其它参数不用设置) 加大数值,曲线则陡。 3.
页码 标准编号4.07 对称电流限值200% 4.11 转矩方式选择4 4.12 电流给定滤波器12ms降低电机噪音 4. 13 电流环比例增益自学习生成 4.14 电流环积分增益自学习生成 4.15 电极热时间常数89 4.23 电流给定滤波器110ms降低电机噪音, ﹟5。**号菜单(其它参数不用设置) 5.07 电机额定电流 A按铭牌设定 5.08 电机额定速度 Rmp按铭牌设定 5.09 电机额定电压 380V 5.11 电机极数 20 5.18 PWM开关频率选择 6K HZ ﹟6。**号菜单(不用设置) ﹟7。**号菜单(不用设置) 7.10=0 7.14=0 ﹟8。**号菜单(其它参数不用设置) 8.21 24端子功能选择10.02 运行使能(10.02变频器工作)8.22 25端子输入源18.38 相当于我们主板的多端速输出Y15 8.23 26端子输入源18.37 相当于我们主板的多端速输出Y14 8.24 27端子功能选择19.44 顺时针旋转(上升)8.25 28端子功能选择18.44 逆时针旋转(下降)可以通过18.45=1 改变运行方向 8.26 29端子输入源18.36 相当于我们主板的多端速输出Y13 8.31 24端子输入(出)选择ON 0:输入功能1:输出功能8.3225端子输入(出)选择OFF 0:输入功能1:输出功能﹟16**菜单(其他参数不用设置)
3 手动数据输入定位
3.1简单加工操作的程序编写和执行 手动数据输入操作方式特别适用于简单加工操作和刀具的预定位。该方式能使您用HEIDENHAIN对话式编程方法或者用ISO格式编写一段短程序并立即执行它。您也能够调用TNC循环。程序储存在$MDI文件中。再用MDI定位的操作方式中,辅助状态显示也能被激活。 手动数据输入定位(MDI) 选择操作的MDI定位方式,按 您的要求编写程序文件$MDI。 按下机床START按钮,开始程 序运行。 限制不能使用FK任意轮廓编程、图形 编程和程序运行图形。$MDI文件 不得包含程序调用命令(PGM CALL)。 例1: 在一个工件上钻一个深度为20mm的孔。当工件被 夹紧并校准好、设置好座标原点以后,您即可开始编制 几行程序并进行钻孔操作。 首先,在L程序块中把刀具预定位在孔中心座标上 方,距工件表面5mm。然后可以用循环1 PECKING(啄 式钻孔)进行钻孔操作。 0 BEGIN PGM $MDI MM 1 TOOL DEF 1 L+0 R+5 2 TOOL CALL 1 Z 52000 3 L Z+200 RO F MAX 4 L X+50 Y+50 RO F MAX M3 5 L Z+5 F 2000 6 CYCL DEF 1.0 PECKING 7 CYCL DEF 1.1 SET UP 5 8 CYCL DEF 1.2 DEPTH -20 定义刀具:零点刀具,半径5。 调用刀具:Z刀具轴线。 主轴转速,2000 rpm。 刀具缩回(F MAX=快速行程)。 刀具以快速行程移到孔上方。 主轴开。 刀具定位到孔上方5mm处。 定义PECKING循环。 设置刀具在孔上方的间隔。 30
空心轴不带内置轴承的角度编码器 作者:Dr.Ing.Rainer Hagl 王桂芳翻译https://www.doczj.com/doc/c43863861.html,/art_9598.html 数控或电子同步轴越来越普遍地使用无框架电机或密封式空心轴电机,尤其在机床行业,印刷机械和纺织机械。这对消除如同步齿型带等带来的机械传动误差,提高传动的位置精度,减少速度波动和提高传动的动态特性显得非常重要。也容比较易设计象附加轴,夹紧轴或材料处理轴的信号线和电源线。 这些电机的位置编码器相应地也许要单独的设计。编码器的空心轴内径相应需要50mm。对于带摆动轴的机床旋转工作台轴,其轴径由0.5 米到几米。如望远镜电机的方位和提升轴要求的直径在5 米以上。 设计人员希望将编码器内置于电机或轴承中从而模块化。如果电机轴承和测量轴达到一定的精度,编码器可以不用内置轴承。本文主要介绍用于带空心轴的驱动电机的模块式编码器的研究动态以及该编码器的特征和与其它设计的对比。 精度和扫描原理 旋转编码器和角度编码器的精度定义为一圈内及一个信号周期内的位置偏差如(图1)。模块式编码器在一圈内的位置偏差主要是由刻度盘相对于扫描头的径向跳动和刻度本身的误差引起的。 图1:一个信号周期内的位置偏差u (上图) 和一圈内的位置偏差a (下图) 一圈内的位置偏差的绝大部分来源于轴承,测量轴的机械结构和安装产生的径向跳动。而一个信号周期内的位置偏差来自扫描质量和信号周期的质量。上述两种位置偏差对驱动
特性具有实质性的影响(表1)并要越小越好,尤其是数字式速度一个信号周期内的偏差控制。由于实际位置值决定了实际速度值,因而编码器的位置偏差决定了控制特性。 表1: 模块式编码器对驱动特性的影响 特别是一个信号周期内的位置偏差,对控制特性的影响尤其重要。这是编码器的制造误差。因此海德汉公司投入极大的精力研制和生产这种在一个信号周期内误差非常小的编码器。包括使用各种信号滤波器及设计复杂的电路以达到此目的;从而使模块式旋转和角度编码器相对于信号周期的误差限定在信号周期的± 1% 以内。扫描原理决定了光栅周期和扫描头与光栅之间的间隙的公差。一个信号周期内的位置偏差见下表(表2): 表2: 无接触式扫描原理的对比 干涉型编码器应用光的干涉和衍射原理,允许非常精细的光栅条纹周期和信号周期,因而可以保证较小的位置偏差。光电扫描的编码器通常采用"传统的" 影像非接触式测量原理,一般可以达到一个信号周期内的位置偏差在± 0.2 μm 以下,该偏差要比磁式和感应式测量原理小10 到20 倍。要选择合适的扫描原理,只有采用光电扫描原理的编码器才可满足控制特性要求较高和更高的精度。 不带内置轴承的旋转和角度编码器的精度主依赖于与其相配轴的轴承精度和用户安装编码器的安装精度。图 2 表明由于码盘与被测量轴的不对中度引起的位置偏差。通常要达到± 1 角秒到± 5 角秒,来自轴承和安装误差的径向跳动量要小于1 μm。该值是在负载下得到的,即考虑了工件重量和操作力。
海德汉旋转编码器主要应用 海德汉旋转编码器主要应用 增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。 旋转增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。 解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。 比如,打印机扫描仪的定位就是用的增量式编码器原理,每次开机,我们都能听到噼哩啪啦的一阵响,它在找参考零点,然后才工作。 这样的方法对有些工控项目比较麻烦,甚至不允许开机找零(开机后就要知道准确位置),于是就有了绝对编码器的出现。 绝对型旋转光电编码器,因其每一个位置绝对抗干扰、无需掉电记忆,已经越来越广泛地应用于各种工业系统中的角度、长度测量和定位控制。 绝对编码器光码盘上有许多道刻线,每道刻线依次以2线、4线、8线、16线编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的2进制编码(格雷码),这就称为n位绝对编码器。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。 绝对编码器由机械位置决定的每个位置的性,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。 由于绝对编码器在定位方面明显地优于增量式编码器,已经越来越多地应用于工控定位中。绝对型编码器因其高精度,输出位数较多,如仍用并行输出,其每一位输
NC 版本: 340 49x-04 PLC 版本:Basic 54 HEIDENHAIN 简明调试手册 iTNC 530
目录 1,调试准备 (1) 1.1本手册中标识的含义 (1) 1.2 各模块概述 ...................................................................................................... 2 1. 2.1 主计算机,硬盘, SIK .......................................................................................... 2 1.2.2 CC 控制单元 ........................................................................................................... 3 1.2.3 UV106 B电源模块 ................................................................................................. 4 1.2.4 显示单元和键盘 . .................................................................................................... 5 1.2.5手轮 . ......................................................................................................................... 7 1.2.6 PLC 模块 ................................................................................................................ 8 1.2.7驱动模块 . .. (9) 2, 系统连接 ........................................................................................... 10 2.1 一般信息 ........................................................................................................ 10 2.1.1 安全措 施 . .............................................................................................................. 10 2.2硬盘(HDR 和 SIK 的安装 . ....................................................................... 11 2.3使用环 境 ......................................................................................................... 13 2.3.1温度和湿度 . ........................................................................................................... 13 2.3.2空 调 . ....................................................................................................................... 13 2.3.3 机械振动 . ............................................................................................................... 14 2.3.4污染 . ....................................................................................................................... 14 2.3 安装空间 ........................................................................................................ 15 2.3.1一般信息 . ............................................................................................................... 15 2.3.2 MC 42x(C, CC42x(B, UV, UM, UE2xxB 安装空间 ......................................... 16 2.3.3显示器 . ................................................................................................................... 16 2.3电气设计重要事项 ......................................................................................... 17 2.3.1供 电 . ....................................................................................................................... 17 2.3.2 电气柜设计基本要求 . ........................................................................................... 17 2.3.3