
MPK708C系统电梯
参数设置说明
编制:罗玉明
沈阳博林特电梯有限公司
MPK708C电气系统出厂参数设置说明
一、MPK708C主控器出厂参数设置说明(Y标准单梯设置,其余视工程而定)
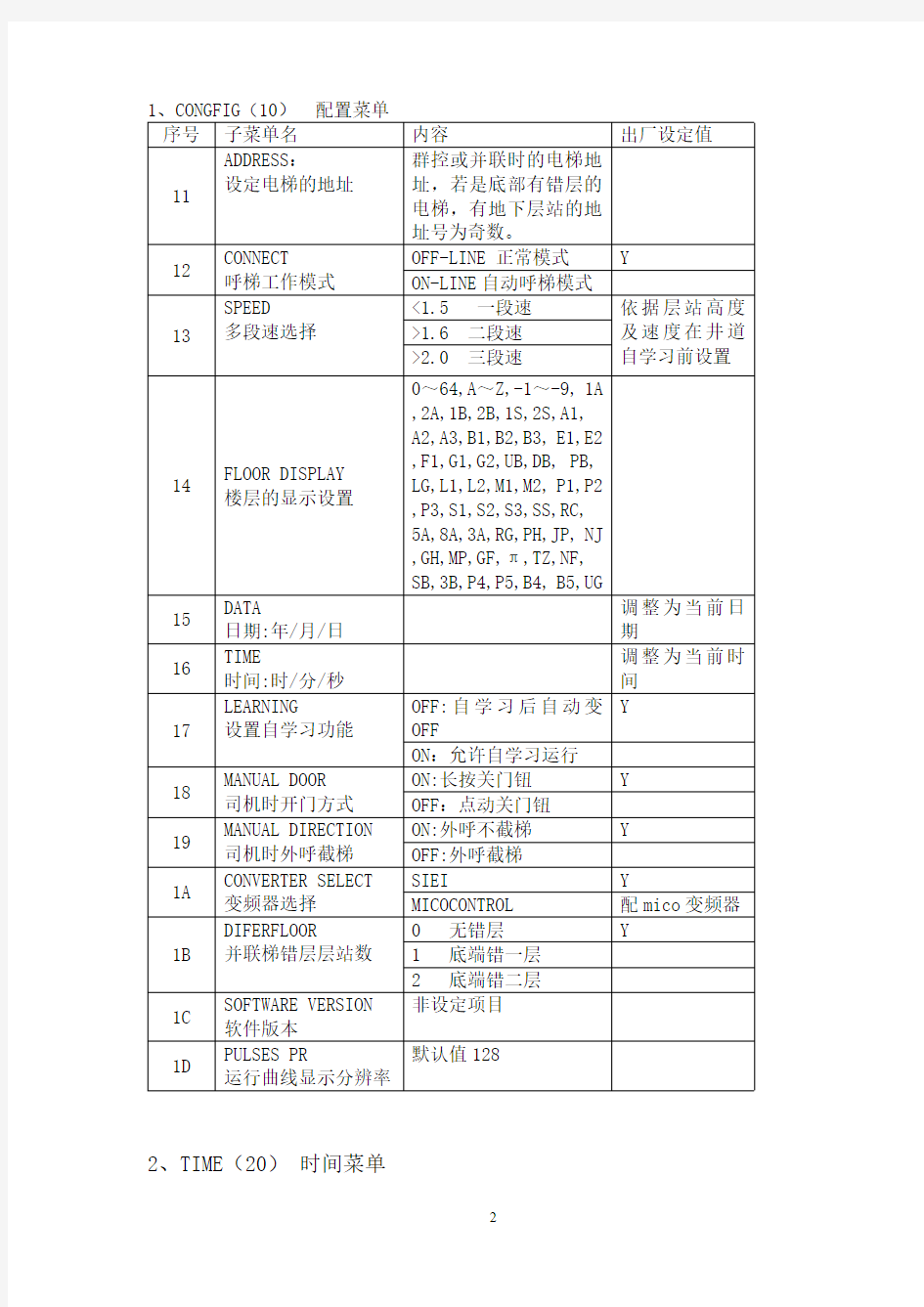
1、CONGFIG(10)配置菜单
序号子菜单名内容出厂设定值
11ADDRESS:
设定电梯的地址
群控或并联时的电梯地
址,若是底部有错层的
电梯,有地下层站的地
址号为奇数。
12CONNECT
呼梯工作模式
OFF-LINE正常模式Y
ON-LINE自动呼梯模式
13SPEED
多段速选择
<1.5一段速依据层站高度
及速度在井道
自学习前设置
>1.6二段速
>2.0三段速
14FLOOR DISPLAY
楼层的显示设置
0~64,A~Z,-1~-9,1A
,2A,1B,2B,1S,2S,A1,
A2,A3,B1,B2,B3,E1,E2
,F1,G1,G2,UB,DB,PB,
LG,L1,L2,M1,M2,P1,P2
,P3,S1,S2,S3,SS,RC,
5A,8A,3A,RG,PH,JP,NJ
,GH,MP,GF,π,TZ,NF,
SB,3B,P4,P5,B4,B5,UG
15DATA
日期:年/月/日
调整为当前日
期
16TIME
时间:时/分/秒
调整为当前时
间
17LEARNING
设置自学习功能
OFF:自学习后自动变
OFF
Y
ON:允许自学习运行
18MANUAL DOOR
司机时开门方式
ON:长按关门钮Y
OFF:点动关门钮
19MANUAL DIRECTION
司机时外呼截梯
ON:外呼不截梯Y
OFF:外呼截梯
1A CONVERTER SELECT
变频器选择
SIEI Y
MICOCONTROL配mico变频器
1B DIFERFLOOR
并联梯错层层站数
0无错层Y
1底端错一层
2底端错二层
1C SOFTWARE VERSION
软件版本
非设定项目
1D PULSES PR
运行曲线显示分辨率
默认值128
2、TIME(20)时间菜单
21STOP
方向/使能释放时间
默认值3.5s
22
START默认值0s备用23
BRAKE默认值0s备用
24DOOR OPEN
开门的时间
默认值3.0s,提前开门
时设置提前开门时间
25DOOR CLOSE
关门的时间
默认值5s
26OPEN PROTECT
开门保护的时间
默认值8s
27CLOSE PROTECT
关门保护的时间
默认值8s
28RINGING
蜂鸣器鸣响频率
默认值10/T
29GONG
到站钟信号输出周期
默认值1s
2A SPEED STOP
自动找平层停延时
默认值0.9s
2B FLOOR PROTECT
单楼层时间保护
默认值13s
2C TIME1
安全触板蜂鸣时间
默认值10s
2D TIME2
运行时间保护
60s
2E
TIME3默认值0s未使用
2F RUN TIMES
运行次数
只读,非设定项
3、STATION(30)
31BASE
并联电梯的基站及锁
梯层站
1-8
根据工程情况
设定
32FIRE HOUSE
消防层站
根据工程情况
设定
33HIGHEST
显示自学习的层站数
非设定项
34WAIT(1)
电梯并联时待梯层
根据工程情况
设定
35
WAIT(2)备用
36REPLY STATION
设置响应的楼层数
根据工程情况
设定
4、CALL(40)呼梯菜单
序号子菜单内容出厂设定值
41UP CALL 上呼
42DOWN CALL 下呼
43CAR CALL 轿内呼梯
5、I/O(50)输入/输出监视菜单
序号子菜单内容出厂设定值
51INPUT(A,B,0.0-3.3)主控制器输入状态
52OUT(0.0-2.5)主控器输出状态
53X01-X08
内选板状态
54A00-A13
PM709输入信号状态X34,X35
主控器输出状态
55B00-B06
PM709输出信号状态
6、DOOR(60)门设置菜单
61DOOR1 1#门
62DOOR2 2#门
7、HISTORY(70)故障记录菜单
序号子菜单内容出厂设定值
70HISTORY Ex:故障代码F:
S:
T:
8、PASSWORD(80)密码菜单
序号子菜单内容出厂设定值
81PASSWORD
密码
PLEASE INPUT:00000
默认值00000
9、PULSE MONITOR(90)脉冲监视菜单
序号子菜单内容出厂设定值
91CURRENT
当前脉冲值
自学习获得
非设定项
92RUN_IN
1/4门区数
自学习获得
非设定项
93DEL.1DISTANCE
V1减速距离
V1减速距离自学习获得
非设定项
94DEL.2DISTANCE
V2减速距离
V2减速距离自学习获得
非设定项
95DEL.3DISTANCE
V3减速距离
V3减速距离自学习获得
非设定项
96FLOOR
对应楼层脉冲数
对应楼层脉冲数自学习获得
非设定项
97DEL.V2PERMIT(×DL)V2允许减速距离自学习获得
非设定项
98DEL.V3PERMIT(×DL)V3允许减速距离自学习获得
非设定项
99RUN V2Dis(×DL)起动V2距离自学习获得
非设定项
9A RUN V3Dis(×DL)起动V3距离自学习获得
非设定项
9B DOOR LENGTH(MM)非设定项,备用10、INPUT SELECT(A0)功能选择菜单
A1GOINGBACK
自动返回基站设定
00:不返基站Y
xx:返基站时间(分钟)
A2BRAKE
抱闸检测选择
ON:检测抱闸开关
OFF:不检测抱闸开关Y
A3DISTURB PRO
轻载防捣乱功能选择
OFF:无此功能
ON:有此功能Y
A4DISTURB NUM
防捣乱数设定
防捣乱数设定,1-8
A5FIRE MODE
消防模式
00:显示“火”字样Y
01:显示“F”字样
04:俄罗斯火灾模式,显示
“π”字样
说明:FIRE MODE参数设置,采用二进制位进行不同消防模式的设置,下图为具体说明,设置参数时需要将其转换为十进制数值进行设置。
默认值00。
00:显示“火”字样
01:显示“F”字样
04:俄罗斯火灾模式,显示“π”字样
序号子菜单名内容出厂设定值
A6SAFEEDGE无用
A7CONTROLMODE
控制模式
03:中国模式,备用电源
时返基站后电梯不运行
Y
11:中国模式,备用电源
时返基站后电梯可继续
运行
01:俄罗斯模式,备用电
源时返基站后电梯不运
行
09:俄罗斯模式,备用电
源时返基站后电梯可继
续运行
说明:CONNTROL MODE参数设置,采用二进制位进行不同控制模式的设置,下图为具体说明,设置参数时需要将其转换为十进制数值进行设置。默认值03。
03:中国模式,备用电源时返基站后电梯不运行
19:中国模式,备用电源时返基站后电梯可继续运行
01:俄罗斯模式,,备用电源时返基站后电梯不运行
17:俄罗斯模式,备用电源时返基站后电梯可继续运行
序号子菜单名内容出厂设定值
A8RE-LEVELING
再平层功能选择
默认值为OFF Y
ON:有再平层功能
A9PRE-OPEN
提前开门功能选择
默认值为OFF Y
ON:有再平层功能
AA PMCARD
扩展板选择
默认值为OFF
ON有提前开门或再平层
AB OPEN-METHOD:
开门方法选择
0:表示单门机单操纵
箱。
Y
1:表示双操纵箱双门机
或单门机场合,要求两
个门机同时开关
2:表示双操纵箱双门
机,要求门机分别控制。
AC REPAIR OPEN:
检修开门方式
无用,改为检修时开门
按钮不能开门。
AD GROUP
群控功能选择
OFF:无群控功能。Y
ON:有群控功能。
AE MONITOR
有小区或远程监视
OFF,无远程监控功能。Y
ON,有远程监控功能。
AF ARRIVE LAMP
报站灯功能
OFF:无到站灯功能Y
ON:有到站灯功能
AG ERROR OPEN TIMES
故障开门次数
0:该功能取消Y
当大于0时,若关门不
到位次数超过该设定
值,则停止自动关门,
若按关门按钮,则重新
尝试关门。
AH TIME4
设置检修运行时断开
速度信号后方向保持
的时间
默认0s。Y
AI FORCE CLOSE
强迫关门功能选择
OFF:无强迫关门功能。Y
ON:有强迫关门功能
AJ TEST TIME
自动运行测试次数
备用
AK CLOSE LAMP
节电照明关灯时间
无呼梯后关闭轿厢灯的
时间,默认03(分钟)
序号子菜单名内容出厂设定值
AL RUN MODE
运行模式
00:无功能A,无功能B Y
01:功能A,电机热检测
02:功能B,电子称量
03:功能A+B
说明:RUN MODE参数设置,采用二进制位进行不同功能的设置,下图为具体说明,设置参数时需要将其转换为十进制数值进行设置。
默认值00。
00:无功能A,无功能B
01:功能A,电机热检测
02:功能B,电子称量
03:功能A+B
1Spd ref/fbk res1880同步0.03125、异步0.125rpm 2Travel unites sel1015millimeters
3Smooth start spd7110同步1、异步5Mm/s 4Multi speed07060117Mm/s 5Multi speed17061800Mm/s 6Multi speed270621000/1250/1500Mm/s 7Multi speed370631500/1750/2000/2500Mm/s 8Multi speed47064300Mm/s 9MR0acc ini jerk8046600Mm/s^3 10MR0acceleration8040600Mm/s^2 11MR0acc end jerk8041600Mm/s^3 12MR0dec ini jerk8047600Mm/s^3 13MR0deceleration8042600Mm/s^2 14MR0dec end jerk8043600Mm/s^3 15MR0end decel8044600Mm/s^2 16Cont close delay7100200ms 17Brake open delay7101200ms 18Smooth start dly7102500ms 19Brake close delay7103800ms 20Cont open delay7104500ms 21Start fwd src7115Dig pad0
22Start rev src7116Dig pad1
23Mlt ramp sel src8090Dig pad2
24Mlt spd s0src7072Dig pad3
25Mlt spd s1src7073Dig pad4
26Mlt spd s2src7074DI7monitor
27SpdP1gain%370010%
28SpdI1gain%370110%
29SpdP2gain%370215%
30SpdI2gain%370310%
31SpdP3gain%370440%
32SpdI3gain%370510%
33Spd0enable3720Enable as start
34Spd0P gain%372240%
35Spd0I gain%372310%
36Prop filter23803ms
37Spd0ref thr3726同步1、异步5rpm 38Spd0ref delay3727500ms 39Spd0speed thr3724同步1、异步5rpm 40Spd0spd delay3725500ms 41SGP tran21h thr370695%
42SGP tran32I thr37070.5%
43SGP tran21band37080.5%
44SGP tran32band37090.1%
45DO0src4065RUN cont mon
46DO1src4066BRAKE cont mon
47DO2src4067Drive OK
48DO3src4068Compare1output
49Dig Enable src156Dig pad15
50Tcurr lim sel1190T lim sym var
51Tcurr lim sel1195Pad15
52Pad0910062
53Pad191014000
54Pad3910332767
55Cmp1inp0src6049Norm Speed
56Cmp1inp160421000
57Cmp1function6044|I0|<|I1|
58Cmp2inp0src6064Speed ref
59Cmp2inp1src6065Norm Speed
60Cmp2function6059I0==I1
61Cmp2window60603276
62Cmp2delay60612s 63EF src9075Dig pad5
64EF hold off96002000ms 三、CT变频器出厂参数设置
1、变频器功能参数
序号参数(所有同一参数)参数名BLT出厂值
1Pr00.34设置访问权限0:可读写操作
2Pr00.49访问级别L2:可以进入所有菜单
3Pr11.31修改控制模式
先在xx.00输入1253(欧洲,
设定值50赫兹)或1254(美
国,设定值60赫兹),再进
入11.31更改需要模式后直
接按红色复位键CL vect闭环矢量(异步)Servo闭环伺服(同步)
4Pr18.45方向取反
(改变电机运行方,On:与
原方向相反)
默认为OFF
5Pr18.48切换增益
(On:允许启动增益和运行增
益切换)
默认为On
6Pr18.50恢复出厂设置(OFF:恢复
BLT运行模式,无需保存自
动变On)
默认为On
7Prxx.00输入1000后按M,再按红色
复位建保存。保存参数(变频器学习后必须保存)
2、编码器参数
序号参数(所有同一参数)参数名BLT出厂值
1Pr3.25编码器自学习角度同步动态自整定得到,
异步无需设置
2Pr3.34编码器每转脉冲数同步2048,异步1024 3Pr3.36编码器电压5V
4Pr3.38编码器类型异步AB,同步EnDat 5Pr3.41设置编码器自动配置同步设1,异步不设置6Pr3.42编码器滤波器异步2,同步0
3.1异步
序号参数(所有同一参数)参数名BLT出厂值
1Pr1.06电机最高转速(rpm)电机额定转速
2Pr5.06电机额定频率(Hz)异步曳引机铭牌
3Pr5.07电机额定电流(A)异步曳引机铭牌
4Pr5.08电机额定速度(rpm)异步曳引机铭牌
5Pr5.09电机额定电压(V)异步曳引机铭牌
6Pr5.10电机功率因数异步曳引机铭牌
7Pr5.11电机额定极数异步4
3.2同步
序号参数(所有同一参数)参数名BLT出厂值
1Pr1.06电机最高转速(rpm)电机额定转速
2Pr5.07电机额定电流(A)同步曳引机铭牌
3Pr5.08电机额定速度(rpm)同步曳引机铭牌
4Pr5.09电机额定电压(V)同步曳引机铭牌
5Pr5.11电机额定极数同步20
4、电梯机械参数
序号参数(所有同一参数)参数名BLT出厂值
1Pr19.27减速比分母曳引机铭牌(异步设置)2Pr19.29曳引轮直径(mm)曳引机铭牌
3Pr19.30减速比分子曳引机铭牌(异步设置)4Pr20.10绕绳方式异步1,同步2
序号参数(所有同一参数)参数名BLT出厂值
1Pr18.18启动优化速度(mm/s)同步1,异步5
2Pr18.11V0(mm/s)115
3Pr18.12V1(mm/s)800
4Pr18.13V2(mm/s)1000/1250/1500 5Pr18.14V3(mm/s)1500/1750/2000 6Pr18.15Vn(mm/s)300
7Pr18.16Vr(mm/s)10
8Pr18.29额定电梯转速(rpm)电机额定转速
9Pr18.30额定电梯速度(mm/s)电梯额定速度
6、曲线参数
序号参数(所有同一参数)参数名BLT出厂值
1Pr19.17启动优化加加速(mm/s3)10
2Pr19.14启动加加速(mm/s3)600
3Pr0.03加速率(m/s2)0.600
4Pr19.15运行加加速(mm/s3)600
5Pr0.04减速率(m/s2)0.600
6Pr19.16停车加加速(mm/s3)600
7Pr19.13停车减速率(mm/s2)600
7、时序参数
序号参数(所有同一参数)参数名BLT出厂值1Pr19.25抱闸打开延时200~400ms 2Pr19.28启动优化延时500ms
3Pr18.21速度阀值1,用于提前开门200mm/s
4Pr18.22速度阀值2,用于端站速度监
控(暂不使用)
800mm/s
5Pr18.23磁场建立阀值500(0.10%) 6Pr18.24抱闸闭合延时800ms
8、增益参数
序号参数(所有同一参数)参数名BLT出厂值
1Pr18.27启动P增益(启动P是运行
P的2~3倍)600(现场根据实际需要设置)
2Pr18.28启动I增益(启动I是运行I
的2~3倍)700(现场根据实际需要设置)
3Pr18.25运行P增益500(现场根据实际需要
设置)
4Pr18.26运行I增益400(现场根据实际需要
设置)
5Pr19.11增益转换时间ms600
6Pr4.12运行转距命令滤波ms异步2,同步0
7Pr4.23启动时转距命令滤波ms8
8Pr5.18最大载波频率kHZ8
课程设计任务书 一、课程设计(论文)题目 JDY500混凝土搅拌机设计-----液压系统I 二、课程设计(论文)应达到的目的 ⑴培养个人独立分析问题、解决问题的能力,并初步建立“系统设计”的思想; ⑵训练学生应用手册和标准、查阅文献资料及撰写科技论文的能力; ⑶了解并掌握UG软件的建模、工程制图、运动仿真等模块; ⑷学习混凝土机械的主要零部件的功能及设计计算方法。 三、课程设计内容 ⑴上料部分、倾翻部分的设计计算 ⑵液压缸的设计计算 ⑶液压泵,电机,液压阀,液压管件,液压油箱的选择 四、主要技术参数 ⑴出料容量 500 L ⑵进料容量 800 L ⑶工作周期≤72 s
摘要 JDY500型单卧轴式强制式搅拌机是随着混凝土施工工艺的改进而发展起来的新型机。强制式单卧轴搅拌机兼有自落式和强制式两种机型的特点,即搅拌质量好、生产效率高耗能低,不仅能搅拌干硬性、塑性或低流动性混凝土,还可以搅拌轻骨料混凝土、砂浆或硅酸盐等物料。 上料系统采用液压缸及增速滑轮组机构,它是以液压缸活塞的伸缩,通过滑轮组牵引联结在料斗上的钢丝绳来实现的,料斗沿上料架上升的高度有液压缸活塞的行程决定。该系统结构简单、操作自由方便,减少了机械上料系统带来的冲击,使料斗运行平稳,并解决了料斗上下限位问题.卸料系统采用液压倾翻卸料机构。利用卸料液压缸活塞的伸缩倾翻搅拌筒卸料,搅拌筒的倾翻角度由液压缸的行程来决定。该机构具有机械式倾翻所无法比拟的良好使用性能,可针对不同混凝土的运输工具,完成一次卸料或分批卸料,操作自如方便,并解决了搅拌筒卸料时的限位问题。 关键词:混凝土搅拌机;液压系统;液压缸;油箱;
安装、使用产品前,请阅读安装使用说明书。 请妥善保管好本手册,以便日后能随时查阅。 GST-DJ6000系列可视对讲系统 液晶室外主机 安装使用说明书 目录 一、概述 (1) 二、特点 (2) 三、技术特性 (3) 四、结构特征与工作原理 (3) 五、安装与调试 (5) 六、使用及操作 (10) 七、故障分析与排除 (16) 海湾安全技术有限公司
一概述 GST-DJ6000可视对讲系统是海湾公司开发的集对讲、监视、锁控、呼救、报警等功能于一体的新一代可视对讲产品。产品造型美观,系统配置灵活,是一套技术先进、功能齐全的可视对讲系统。 GST-DJ6100系列液晶室外主机是一置于单元门口的可视对讲设备。本系列产品具有呼叫住户、呼叫管理中心、密码开单元门、刷卡开门和刷卡巡更等功能,并支持胁迫报警。当同一单元具有多个入口时,使用室外主机可以实现多出入口可视对讲模式。 GST-DJ6100系列液晶室外主机分两类(以下简称室外主机),十二种型号产品: 1.1黑白可视室外主机 a)GST-DJ6116可视室外主机(黑白); b)GST-DJ6118可视室外主机(黑白); c)GST-DJ6116I IC卡可视室外主机(黑白); d)GST-DJ6118I IC卡可视室外主机(黑白); e)GST-DJ6116I(MIFARE)IC卡可视室外主机(黑白); f)GST-DJ6118I(MIFARE)IC卡可视室外主机(黑白)。 1.2彩色可视液晶室外主机 g)GST-DJ6116C可视室外主机(彩色); h)GST-DJ6118C可视室外主机(彩色); i)GST-DJ6116CI IC卡可视室外主机(彩色); j)GST-DJ6118CI IC卡可视室外主机(彩色); k)GST-DJ6116CI(MIFARE)IC卡可视室外主机(彩色); GST-DJ6118CI(MIFARE)IC卡可视室外主机(彩色)。 二特点 2.1 4*4数码式按键,可以实现在1~8999间根据需求选择任意合适的数字来 对室内分机进行地址编码。 2.2每个室外主机通过层间分配器可以挂接最多2500台室内分机。 2.3支持两种密码(住户密码、公用密码)开锁,便于用户使用和管理。 2.4每户可以设置一个住户开门密码。 2.5采用128×64大屏幕液晶屏显示,可显示汉字操作提示。 2.6支持胁迫报警,住户在开门时输入胁迫密码可以产生胁迫报警。 2.7具有防拆报警功能。 2.8支持单元多门系统,每个单元可支持1~9个室外主机。 2.9密码保护功能。当使用者使用密码开门,三次尝试不对时,呼叫管理中 心。 2.10在线设置室外主机和室内分机地址,方便工程调试。 2.11室外主机内置红外线摄像头及红外补光装置,对外界光照要求低。彩色 室外主机需增加可见光照明才能得到好的夜间补偿。 2.12带IC卡室外主机支持住户卡、巡更卡、管理员卡的分类管理,可执行 刷卡开门或刷卡巡更的操作,最多可以管理900张卡片。卡片可以在本机进行注册或删除,也可以通过上位计算机进行主责或删除。
博检存档编 存档日 艺工调电梯试ⅡBLT- 司公限有梯电特林博阳沈
Ⅱ沈阳博林特BLT 调试工艺 Catalogue 录目 慢车调试工艺1. Page Description No. 页序号说明 9 1.1 检查和确认9 1.1.1 现场机械装配检查及确认10 1.1.2 电气装配检查及确认12 1.1.3 编码器装配的检查13 1.2 上电和检查13 1.2.1 进一步的确认和检查13 1.2.2 ±检查现场提 供的总进线电压,三相电压应为3807%VAC,相间偏差13 1.2.3 图纸的要求检查总进线线规及总开关容量应达到CAD13 1.2.4 以上检查都得以确认正常后,则可上电调试13 1.2.5 通电 后的检查21 1.3 主机整定21 1.3.1 616GL5-JJ)型号使用安川变频器的主机(型号21 1.3.1.1 准备和检查22 1.3.1.2 主机整定24 1.4 机房检修运行26 1.5 轿顶检修操作26 1.6 紧急电动运行BLT CONTROL SYSTEM1 Ⅱ沈阳博林特BLT 调试工艺 2 快车调试工艺 27 2.1 检查和确认27 2.1.1 现场机械装配检查及确认27 2.1.2 电气装配检查及确认29 上电和检查2.2 29 2.2.1 进一步进行确认及检查29 2.2.2 门机的检查和调试31 2.2.3 光幕的检查 31 轿厢层显的检查2.2.4 31 2.2.5 平层感应器接线检查32 2.2.6 终端强迫减速开关的检查和调试
32 ,检查每层平层插板安装位置数量正确2.2.7 33 快车调试工艺2.3 33 2.3.1 BLT-KOLLMORGEN主板参数一览33 2.3.1.1 主要参数34 输入输出信号设置表2.3.1.2 35 2.3.1.3 F参数菜单表 36 2.3.2 模拟速度指令系统的调试36 井道学习2.3.2.1 37 2.3.2.2 试运行 37 2.3.2.2.1 再平层功能的检查38 2.3.2.2.2 单层运行BLT CONTROL SYSTEM2 Ⅱ沈阳博林特BLT 调试工艺 38 2.3.2.2.3 双层运行38 2.3.2.2.4 全程运行38 开,关门运行的确认2.3.2.2.5 38 2.3.2.2.6 光幕功能的确认38 2.3.2.2.7 关门力矩的确认 38 2.3.2.2.8 轿厢选层按钮功能确认39 2.3.2.2.9 确认其他功能开关 39 2.3.2.3 运行舒适感调整40 2.4 井道串行通讯系统的调试 40 2.4.1 检查和确认41 2.4.2 上电确认41 井道SM-04板的调试2.4.3 42 2.5 平层精调 42 2.5.1 平层偏移量的确定42 2.5.2 平层精调 44 并联调试2.6 44 2.6.1 确认并联接线45 2.6.2 并联调试的确认46 群控调试2.7 46 2.7.1 确认群控群线47 2.7.2 群控调试的确认 48 2.8 消防功能的调试BLT CONTROL SYSTEM3 Ⅱ沈阳博林特BLT 调试工艺 48 2.8.1 消防功能的定义48 2.8.2 消防功能的输入点48 2.8.3 消防功能的调试49 故障代码表 2.9
机床液压系统使用说明书 在客户新购买的液压站常常不知道怎么使用,或者使用错误,造成原本不会出现的液压站故障。那么在使用新液压站时,请详细阅读汉力达液压提供的液压系统使用说明书。 一、液压站工作条件 1.调试前必须认真检查下列各项: (1)因为经过运输,收到货后请检查液压站外观是否有破损,各管路是否有松动; (2)如果电控箱是您自行配置的,那么需要把液压站和电控箱的线路连接起来,确保线路正确、牢固可靠; (3)为油箱加液压油。冬天用32#液压油,夏天用46#液压油。液压油常有规格:200L/桶、18L/桶。 例如YZL120-Z3,则准备至少120L油。装油时,观察液位计指针(红线与黑线之间)。 调整测试液压系统的调整测试的主要内容有空负荷测试和负荷测试等。 1.空负荷测试 空负荷测试目的是全面检查液压系统各个元件、辅助装置和各种基本回路的动作是否正常。 检查的方法是:(1)启动液压泵,先点动确定液压泵的转向。一般为从电机后端看是顺时针转。
(2)松开全部溢流阀手柄(压力调到最小,溢流阀先调到最低,测试时观察压力表指示在最低),泵在空负荷下间歇运转。 ①检查泵的卸荷压力是否在允许范围内。(压力表指针是否在低位) ②有无刺耳噪声。 ③油箱中油液表面是否有吸入空气的泡沫。 ④将液压缸在低压下来回动作数次,最后以最大行程往复多次,以排除系统中积存的空气。
(3)空负荷运转一段时间后,检查油箱内的油面是否过低。 (4)检查安全阀及压力继电器等是否可靠。 (5)当液压系统连续运转半小时以上时,查看油温是否在35~60℃的规定范围内。 (6)检查系统有无异常。 (7)检查各连接处、接合面有无泄漏。 2.负荷测试负荷测试是使液压系统在规定负荷下工作,是检查液压系统能否满足各种参数和性能要求的重要阶段。一般先在低于最大负荷下测试,然后逐渐加载。如果运转正常,才能进行最大负荷测试。 (1)负荷测试时,应缓慢旋紧溢流阀手柄,使系统的工作压力按预先选定值逐渐上升,每升一级都应使液压缸往复动作数次或一段时间。 (2)测试过程中,还应及时调节行程开关、先导阀、挡铁、碰块及自动控制装置等,使系统按工作循环顺序动作无误。
门禁系统使用说明 门禁为局域网内系统,服务器地址为:219.224.92.150 端口为3777. 门禁系统无需安装,通过浏览器即可访问,在浏览器地址栏中输入:219. 224.92.150:3777然后点击回车键即可登陆门禁界面。 ↓ 登陆管理员所分配的账号密码进入门禁系统。 门禁系统界面简介: 总分类:人事、设备、门禁和系统设置。
我的工作面板中有简单的操作引导: 常用的门禁功能操作,人员的增加,门禁节假日,及其门禁设备的监控,通过点击功能可以快捷进入。 新手可以根据控制面板的右面边框中,按步骤一步一步熟悉门禁系统,来达到快速了解并掌握门禁系统,下面来说一说门禁常用的几个功能介绍。 1门禁人事: 一般由管理员单项操作,包括上面:部门、人员、人员离职、人员发卡四个操作单位。 部门:是指管理员建立的指向性的分组,分组按照需求来自己命名,人员编辑中更好的区分各人员的职位,在门禁监控中可以更好地检测刷卡人信息完整度。 人员:指人员增加或去除,每个人的出入日至及其简单的个人信息查询等。
人员增加:点击进入人员增加信息界面, 通过USB连接刷卡器来获取加入卡片的编码:然后尽可能详细的填写持卡人的信息(方便
日后高效查询)图中横线部分属于必填部分, 最后按照需求持卡人对门的权限进行确定后点击 确定完成人员添加。 人员离职:指的是人员卡片的废除记录
人员发卡:是指在大型工厂下批次增加持卡的功能(由于对人员的要求不常用) 设备: 区域设置:是指对门禁系统人员部门所在区域的划分。
设备: 我们可以对门禁进行各项操作,点击编辑
电梯控制系统设计设计说明
第 1 页共 3 页 编号: 毕业设计说明书 题目:电梯控制系统设计 院(系):电子工程与自动化学院 专业:电子信息科学与技术专业 学生姓名: 学号:0900840218 指导教师:李莉 职称:讲师 题目类型:理论研究实验研究工程设计√软件开发 2013年5月20日
第 3 页共 39 页 摘要 本设计主要利用AT89S52单片机,实现电梯控制系统的设计。单片机与电机驱动电路的结合完成了电梯基本的升降、楼层停靠、方向选择、时间控制等基本功能,研究并实现了在上位机的模式下通过LABVIEW的远程监测的方法,完成了系统样机的设计与制作。 本设计参照了通用电梯的设计标准,有良好的操作界面和通用的外部接口,具有人性化设计,实现较好的外设兼容性。同时在系统样机中完成的其它设计研究还包括,利用LED和蜂鸣器组成的简单电路实现电梯意外声光报警、利用数码管实现电梯楼层显示,利用4x4矩阵键盘实现电梯楼层按键选择,利用LED实现目的楼层的指示,利用MAX232串口电路实现串口通信,来监测电梯实时状态。样机使用的主要器件包括低功耗、高性能的AT89S52单片机,低功耗、低成本、低电压的MAX232,双全桥电机专用驱动芯片L298,共阴极八段数码管,4x4矩阵键盘等,通过比较合理的设计使样机系统基本达到了任务要求,并具有很高的性价比,硬件设计简单可靠。软件部分使用keil软件进行C语言程序编写,用proteus 7软件进行仿真调试。本设计中综合使用了数字电路、模拟电路、高频电路、单片机及编程、硬件逻辑描述、LABVIEW及其应用以及计算机辅助设计(CAD)等多方面的知识,软硬件结合,很好地完成了本科毕业设计任务要求并取得了良好的学习效果。 关键词:AT89C52;单片机;电梯控制系统; C语言
电梯调试工艺 BLT-Ⅱ 沈阳博林特电梯有限公司
Catalogue 目录1. 慢车调试工艺 No. 序号Description 说明 Page 页 1.1 检查和确认9 1.1.1 现场机械装配检查及确认9 1.1.2 电气装配检查及确认10 1.1.3 编码器装配的检查12 1.2 上电和检查13 1. 2.1 进一步的确认和检查13 1.2.2 检查现场提供的总进线电压,三相电压应为380±7%VAC,相间偏差13 1.2.3 检查总进线线规及总开关容量应达到CAD图纸的要求13 1.2.4 以上检查都得以确认正常后,则可上电调试13 1.2.5 通电后的检查13 1.3 主机整定21 1. 3.1 使用安川变频器的主机(型号616GL5-JJ)型号21 1.3.1.1 准备和检查21 1.3.1.2 主机整定22 1.4 机房检修运行24 1.5 轿顶检修操作26 1.6 紧急电动运行26
2 快车调试工艺 2.1 检查和确认27 2.1.1 现场机械装配检查及确认27 2.1.2 电气装配检查及确认27 2.2 上电和检查29 2.2.1 进一步进行确认及检查29 2.2.2 门机的检查和调试29 2.2.3 光幕的检查31 2.2.4 轿厢层显的检查31 2.2.5 平层感应器接线检查31 2.2.6 终端强迫减速开关的检查和调试32 2.2.7 检查每层平层插板安装位置,数量正确32 2.3 快车调试工艺33 2. 3.1 BLT-KOLLMORGEN主板参数一览33 2.3.1.1 主要参数33 2.3.1.2 输入输出信号设置表34 2.3.1.3 F参数菜单表35 2.3.2 模拟速度指令系统的调试36 2.3.2.1 井道学习36 2.3.2.2 试运行37 2.3.2.2.1 再平层功能的检查37 2.3.2.2.2 单层运行38
《门禁系统使用说明书》 陕西********科技有限公司 单位地址:**************************** 联系电话:**************************** 目录 (1.1)软件系统---------------------------------------------------------------------------------------1-135 第一章软件基本操作 ...................................................................................................................... 错误!未定义书签。 2.1进入操作软件 (1) 2.4人事管理 (2) 2.4.1 企业信息.......................................................................................................................................................................................... - 2 - ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 ..................................................................................................................................................................................... 错误!未定义书签。 2.6.2 正常班考勤设置............................................................................................................................................................................ - 4 - 2.6.2.1 设置考勤基本规则................................................................................................................................................. - 5 - 2.6.4 添加考勤人员 ............................................................................................................................................................. - 5 - (1.2)控制器------------------------------------------------------------------------------------------------------23 2.1.1 双门控制器接线图----------------------------------------------------------------------------------------- 1 -(1.3)读卡器------------------------------------------------------------------------------------------------------24 3.1.1 使用须知----------------------------------------------------------------------------------------------------- 1 - 3.1.2 基本概念----------------------------------------------------------------------------------------------------- 1 - 3.1.1 登记和验证-------------------------------------------------------------------- 1 -(1.3)系统功能--------------------------------------------------------------------------------------------------38 4.1.1 系统功能介绍-----------------------------------------------------------------------------------------------38-
/ 第4章四层楼电梯控制系统设计 电动机控制电路图 根据设计要求,本次设计的电气控制系统主回路原理图如图4-2所示。图中M1,M2为曳引电机和门电机,交流接触器KM1~KM4通过控制两台电动机的运行来控制轿厢和厅门,从而进行对电梯的控制。FR1,FR2为起过载保护作用的热继电器,用于电梯运行过载时断开主电路。FU1为熔断器,起过电流保护作用。 曳引电机门电机 图4-2电动机控制电路图 PLC外部接线图 PLC外部接线图见下图4-3,其中包含主控制器CPU224CN及扩展模块EM223。接线图分为DC输入端和DC输出端。 , 输入端DC24V的负极接公共端1M和2M。输入开关的一端接到DC24V的正极,输入开关的另一端连接到CPU224或ME223各输入端。
输出端DC24V的正极接L+端。输出负载的一端接到DC24V的负极,输入开关的另一端连接到CPU224或EM223各输出端。 : } —
] ) 图4-3 PLC外部接线图 流程图 电梯上下行流程图见图4-4。假设电梯停在N(N=1,2,3,4)楼,M楼有信号,M >N时,电梯上行;M<N时,电梯下行。 / 、
~ ; 图4-4 电梯上下行流程图 在电梯运行过程中,电梯上升(或下降)途中,任何反方向下降(或上升)的外呼梯信号均不响应,但如果反向外呼梯信号前方向无其它内、外呼梯信号时,则电梯响应该外号。 ; 电梯应具有最远反向外梯响应功能。例如:电梯在一楼,而同时有二层向下外呼梯,三层向下外呼梯,四层向下外呼梯,则电梯先去四楼响应四层向下外呼梯信号。 电梯响应流程图见图4-5。
, ? 图4-5 电梯响应流程图 . 当电梯到达系统控制的目标楼层时,控制系统发出开门信号,电梯门开,当门开到开门限位时,计时3秒钟,然后关门,直到关门限位产生信号。此过程期间,按开门按钮电梯门打开,按关门电梯门关闭,并且当门关闭动作时,门间来人会使光电传感器产生信号,控制系统发出开门信号,电梯开关门流程图见图4-6。
沈阳博林特电梯有限公司第 1 页共8 页 二、规格型号、技术参数说明 1)直梯有齿曳引机的型号由以下符号组成 YJ □△ Y——曳引机 J——交流电源 □——曳引机减速器中心矩(mm) △——变型更新代号,用A、B、C……表示 2)产品铭牌构成(如下图)
3)技术参数 YJ240系列
YJ160系列
三、工作条件 1、海拔高度不超过1000米; 2、机房内空气温度应保持在+5~+40℃之间,相对湿度不大于90%; 3、环境空气中不含有腐蚀性、易燃性气体; 4、供电电压保持在380±7% V,频率为50Hz; 5、机房内要求有良好的照明和消防设施。 四、主要结构及工作原理 本曳引机主要由电机、减速箱、制动器、曳引轮、轴承架、加高台等零部件组成。 工作原理:通电时,电磁制动器动作使制动部件对制动轮松闸,同时主动力由电机经联轴器传至蜗轮减速箱的蜗杆轴,蜗杆带动蜗轮,使与蜗轮同轴的曳引轮同步旋转,并通过钢丝绳与曳引轮绳槽间产生的相对静摩擦力来实现电梯轿厢的升降运行;零速时,电磁线圈失磁,制动器抱闸制动。 五、吊运安装 a)运输、存储的工作环境条件:-25℃~55℃/70℃。 b)吊运:已装箱的曳引机应按吊装规范同包装箱整体吊装至机房,拆箱后需要 起吊时在吊环处吊运。见附图 c)注意:曳引机出厂前已装配调试检验合格,用户不得随意拆开吊装。
d)安装:曳引机机架的安装尺寸如附图一所示,曳引机、导向轮、加高台等系 统部件与搁机梁之间的安装关系如附图二所示(该系统图仅供参考)。 e)搁机梁采用普通工字钢或槽钢,其强度必须符合电梯标准的有关规定,安装 精度不大于千分之一。 f)加高台安装底面与四只减震垫在安装螺栓拧紧前用塞尺检查,结合面不允许 有间隙。 六、使用与维护 a)曳引机外表面应保持清洁,防止灰尘污垢。定期用干净的棉纱擦拭制动轮、 曳引轮工作面。 b)制动器: i.制动时闸瓦应均匀紧贴制动轮表面,松闸后闸瓦与制动轮之间的间隙应小 于0.5mm,且无局部接触。 ii.当闸瓦磨损后与制动轮表面的间隙过大时,应及时调节使间隙符合要求。 间隙大小可通过调节制动臂上的两只螺钉来实现,制动弹簧工作长度也相 应改变,并且保证两边制动力大约一致。(参见附图三) iii.定期检查闸瓦的工作面,清除工作面上的粘附的杂质,如闸瓦工作面磨损量超过闸瓦厚度的四分之一,或闸瓦中间定位嵌件露出时,应及时更换。 iv.制动器动作应灵活可靠,电磁线圈温升不超过90K。 c)曳引轮在下列情况下应重修或更换: i.曳引轮各槽因磨损不均匀。造成钢丝绳高低不一致,当其高度差大于钢丝 绳直径二分之一时,应修绳槽至深度一致。 ii.绳槽磨损使钢丝绳与槽底间小于1mm时,应重车或更换曳引轮,重车时应注意切口下面的轮缘厚度不小于钢丝绳直径。
翻车机液压系统 使用说明书 :白酒2斤,灵芝20克,黄芪20克,党参15克,白术10克,白糖或冰糖4斤 一、技术参数 1、系统压力 5 Mpa(压车梁压力) 3.5Mpa(靠车板压力) 5Mpa(控制回路压力) 2、油泵排量85ml/r(大泵) 56ml/r(次级泵) 16ml/r(小泵) 3、电动机Y180L-4W P=22KW n=1470r/min 4、油箱容积850L 5、液压油YB-N46 二、原理图及动作说明 1原理图
1、动作顺序说明 1)启动电动机,空转几分钟后,待达到系统内循环平衡。 2)重车在翻车机上定位后,1DT、3DT得电,压车梁开始压车。1XK 发讯号,压车梁压紧到位,1DT、3DT失电。 3)4DT、9DT得电,靠板开始靠车,4XK发讯号,靠板靠紧到位,4DT、9DT失电。 4)翻卸开始,5DT、6DT得电,释放弹簧的弹性势能,待翻车机转 到110°时,5DT、6DT同时失电。 5)翻车机回翻到零位后,4DT、8DT、5DT、7DT得电,靠板开始 松开,3XK发讯号,靠板松靠到位,4DT、8DT、5DT、7DT失电。 6) 2DT、3DT、5DT、6DT得电,压车梁开始松压。2XK发讯号,
压车梁松压到位,2DT、3DT、5DT、6DT失电。 7)重车调车机推空车,进入下一个循环。 三、启动与调试操作 1、油箱注油至油标上限,约为油箱容积2/3(注液压油必须经≤ 20um滤网过滤后方可注入油箱)。 2、将进油口、回油口管路球阀打开,将所有溢流阀均调至开口最 大状态。 3、检测电机绝缘应>1mΩ,接通电源,点动电机,观察电机旋转 方向(从电机轴端处看应为顺时针方向旋转) 4、启动电机,容载运行5~10min (注此时为排系统内空气)检测电 机电流,空转电流约15A左右,判断油泵有无异常噪音、振动以及各阀件管路连接处是否有漏油现象,否则应停机进行处理。 5、调整压车回路,靠车回路,控制回路压力至参考压力值。调整 控制回路压力时需让电磁换向阀处于工作状态,否则无法调定。 6、待系统压力调整正常后,进行平衡油缸回路顺序阀压力整定, 其压力设定高于压车回路压力2Mpa左右。 7、所有压力调整过程中,应使压力均匀上升至调定值。 8、调整压力完毕后,再通电进行调试。 9、所有油缸在运动中均应无卡涩、冲击、爬行现象,才可认为动 作正常。 10、以上工作均结束后,检查各管道连接处有无漏油、渗油现象, 否则需更换密封件。
1 课题概述 1.1 课题的主要研究内容及设计步骤 本课题的主要任务是完成一个电梯系统的调度模块,即根据每个楼层不同顾客的按键需求,让电梯做出合理的判断,正确高效地知道电梯完成各项载客任务。根据此任务,本课题需要研究的内容有: 1、根据系统的技术要求,进行系统硬件的总体方案设计; 2、学习单片机的相关知识,并且加以运用; 3、选择恰当的芯片,并对其内部协议有所掌握,便于应用。 4、研究C语言编程,并且规定电梯的工作规则,用C语言加以实现; 5、对软件和硬件进行调试,让其协调工作,完成指定任务。 结合以上内容,本课题的设计方案步骤如下: 关于硬件部分: 首先,对实际的电梯系统进行模拟,一般情况下,一个电梯应该具备相关按键、显示二极管、数码管等,由于这是一个调度模块,故没有设计具体的轿厢等机械部分。然后,结合这些实物,选择恰当的芯片,并分成若干模块,安排好各自之间的关系。接着,要完成电路图的设计,画出PCB板,焊接相关器件后进行硬件调试,看是否好用并加以适当的更正。 关于软件部分: 关于电梯调度时所遵循的原则作出规定,其必须基于高效与人性化两个原则。最后是使用C语言将规定程序化,以便电梯真正的运作。 当然,二者的关系并不是分离的,它们是相辅相成,硬件依据软件来验证,软件依据硬件来调试。经过一个个的发现问题、一个个的解决问题,最终做出完美的电梯调度模块。 1.2课题的开发环境简介 1.2.1 电路图制作软件proteus 7.2 Proteus是目前最好的模拟单片机外围器件的工具,因此在仿真和程序调试时,关心的不再是某些语句执行时单片机寄存器和存储器内容的改变,而是从工程的角度直接看程序运行和电路工作的过程和结果。对于这样的仿真实验,从某种意义上讲,是弥补了实验和工程应用间脱节的矛盾和现象。 1.2.2 C51的程序开发软件Keil
重车调车机液压站 使用说明书 一、重车调车机液压系统概述 1、用途 该液压系统适用于翻车机系统配套设备重车调车机以及其它列车牵引设备的牵车臂的提升和落下。另外它也可适用于各种不同需要提升或落下重物的场合。 2、组成 该液压系统主要由63kW卧式电机、叶片泵、冷却器、溢流阀、换向阀、执行机构、油箱等装臵组成。该液压系统采用集成式设计,体积小,结构紧凑,无渗漏,易维护,操作简便、可靠。 二、重车调车机液压系统技术参数 1、系统压力 抬臂压力:10~12Mpa 落臂压力:8~10Mpa 前钩压力:2~2.5 Mpa 后钩压力:2~2.5 Mpa 2、油泵排量 油泵排量:46ml/r 3、电动机 型号:Y160L-4W P=15KW n=1470r/min
4、油箱容积 油箱有效容积:790L 5、液压油 L-HM46,环境温度较低或没有本品时,可选L-HV46或L-HS46 6、油温 油温:8~70o C,当温度超过80 o C液压系统停止运行 7、动作时间 抬臂时间: ≤10s 落臂时间: ≤8s 提前钩时间:≤3s 提后钩时间:≤3s 三、重车调车机液压系统原理图及动作说明 1、原理图 本系统主要有以下四个作用:抬臂、落臂、摘前钩、提后钩。 叶片泵(12)通过弹性联轴器从电机(13)得到机械能后,经滤油器(11)从油箱(1)吸油,然后从泵的出口输出压力油P。P的压力由溢流阀(16)调定。压力油P经单向阀(14)至集成块,压力油分三路,第一路经叠加阀(18)(19)(20)(21)至摆动油缸;第二路经叠加阀(22)(23)(24)至前钩油缸;第三路经叠加阀(22)(23)(24)至后钩油缸。摆动油缸、配重联动,完成大臂抬落。2、动作顺序说明
单门门禁一体机操作使用说明书 单门门禁是专门为电动门锁及安全防范系统而设计,支持感应卡开门、密码开门、感应卡+密码开门三种开门方式。操作方便,使用简单,安全可靠。设备具备超强的抗干扰能力和自我诊断自我保护功能。支持2000个用户(包括感应卡用户、密码开门用户、感应卡+密码开门用户),而且所有存储信息不会因电源断电而丢失,同时支持外接韦根26读卡器、门铃输出等。是应用于办公室、家庭、机房及公共场所的首选理想门禁装置。 系统初始编程密码为9 9 9 9 进入编程状态 按 * 编程密码#进入系统编程状态。 任何编程设置必须在编程状态下方可进行编程操作,否则任何编程操作均无效,如果已经处于编程状态下,则无须再输入系统编程密码,可直接进行下面相应的编程设置操作,如果在编程状态下10秒种内没有对系统进行任何编程操作,系统将自动退出编程状态,返回正常状态,黄色LED指示灯每秒闪烁一次。 注:在完成所有的设置之前一定要按#键,否则所有的设置将不保存 在编程模式下做以下操作: 修改管理员密码 按 0 新密码# 管理员编程密码为4位任意数字,按*可退出 添加用户 增加卡或卡+密码型用户,按1 读卡# 增加单独密码型用户,按1 输入4位开门密码# 如果添加的卡片超过1张,可以不用按#而继续读下一张卡片,当所有的卡添加完成再按#键。在添加卡加密码用户的同时系统自动生成和卡对应的密码用户,默认的密码为1234(卡加密码用户如何修改密码请参考卡加密码用户修改密码章节)。 删除用户 删除全部卡用户:按2 0000 # 刷卡删除:按2 读卡# 按卡号删除:按7 输入卡号后10位数字# 设置开门方式 卡或密码模式:按3 00 # 卡+密码模式:按3 01 # 设置开门延时 按4 新延时时间# 门继电器输出可以工作在常开或者常闭,工作在常开继电器的输出可以达到3A,工作在常闭可以达到2A,开门延时可以设置在00-99秒,出厂默认设置为6秒。 报警输出时间设置 按5 新延时时间# 报警输出时间可以设置在00~99分钟,出厂默认值为3分钟。 门磁检测设置 按6 00 #关闭门磁检测功能 按6 01 #打开门磁检测功能 修改普通用户密码 按8 4位用户密码#新4位用户密码# 退出管理员编程模式 在设置完成以后,按 * 键可退出管理员编程模式。 卡加密码用户修改密码 卡+密码用户可以自己修改该密码而成为一个独立不相同的密码。 按 * 读卡(黄色LED和绿色LED交替闪烁) 用户旧密码#新密码# 注:第一次修改密码时“用户旧密码”是系统默认的1234,用户密码必须是4位数字。 使用密码开门 按4位开门密码#即可。
电梯控制系统GST-MT6000 根据智能建筑的实际需求,本着科学合理、经济实用、稳定可靠、扩充性强的原则自行开发研制出了可以与可视对讲系统集成使用的GST-MT6000智能门禁梯控系统。这是继海湾公司推出GST-DJ6000智能型可视对讲系统以来,又一款自主研发设计的安防新系统。该系统与GST-DJ6000可视对讲系统的集成使用,实现了门禁、梯控、可视对讲三套系统的集成,将原本3套独立的管理软件集成为1套管理软件。 (一) 集成应用的实现方式 1.梯控系统应用示意图 门禁控制器 可视对讲联网器 联网分支器 联网分支器 梯控CAN 总线 梯控CAN 总线 … 可视对讲CAN 总线 2号电梯 1~8层电梯控制模块2号电梯 9~16层电梯控制模块 2号电梯读卡头···2号电梯 17~24层电梯控制模块1号电梯1~8层电梯控制模块 1号电梯 9~16层电梯控制模块 1号电梯读卡头 ··· 1号电梯 17~24层电梯控制模块 梯控CAN 总线 梯控CAN 总线 梯控CAN 总线 系统中电梯读卡头是识读部分,门禁控制器是控制部分,电梯控制模块是执行部分,三个部分之间通过CAN 总线进行通讯。每个电梯控制模块可以控制8个楼层,每部电梯可以连接10台电梯控制模块,最多可以控制80层的电梯。电梯控制模块与电梯本身的主控系统电气隔离。电梯控制模块断电后,自动恢复到电梯原有状态,不影响电梯原来功能的正常使用。 开启电梯楼层权限有2种方式:一种方式是:在电梯读卡器上刷卡,电梯控制模块开启相应楼层的选层权限或接通选层键。另一种方式是:门禁控制器将我公司可视对讲系统的用户开锁信息转发给电梯控制模块,电梯控制模块控制电梯到达一层,并开启用户所在楼层的选层权限。 使用电梯时,不同的人有不同的权限分配,并且可以根据时间表进行授权管
自动防盗报警装置使用说明书 一、系统概况 日常生活中,防盗是必不可少的,所以设计一款集防盗与报警一体化的小型设备是尤为重要的。我们设计的这个产品采用了身份识别系统和介质传感器,当小偷未通过身份识别而打开门时,传感器会引发报警装置通过声音回馈结果,同时把信号反馈到终端机并且动态自动加锁,达到防盗的目的。该产品可广泛应用于各种场合,如宿舍、家中及超市储物柜等,方便,安全,可以减少财产损失,防止各种重要证件、文件被盗,使使用者从中受益。 二、系统组成 自动防盗报警系统主要由单片机、电源指示、工作指示、振荡电路、蜂鸣器电路、门控锁电路、4×4矩阵键盘、读卡模块、显示模块组成。 图1 系统原理图 1.系统工作原理 当刷卡时,蜂鸣器响一下,如卡权限获得允许,显示模块显示卡号,同时继电器动作将门锁打开指示灯点亮,延时一段时间后继电器再次动作将门锁锁闭指示灯熄灭;当非法卡刷卡时,没有任何动作。当按下出门按钮时,继电器动作将门锁打开指示灯点亮,延时一段时间后继电器再次动作将门锁锁闭指示灯熄灭。当进门输入密码时,密码正确则继电器动作将门锁打开指示灯点亮,延时一段时间后继电器再次动作将门锁锁闭指示灯熄灭;密码错误则蜂鸣器报警,延时一段时间后蜂鸣器停止报警。 2.系统控制器 系统控制器是整个门禁系统的核心设备,它直接影响系统是否正常运行。所有的系统运行都要通过门禁控制器来传输和实行。包括(I C感应卡开门、超级密码开门、触摸按钮开门、软件开门等功能)。感应式IC卡门禁的核心是应用感应式技术(RFID)技术,主要运用的是FM1702sl非接触卡读卡机专用芯片。此
门禁控制系统在使用之前必须对每张IC感应卡对人注册相关的信息。使用过程中系统会对每张IC感应卡的个人信息进行审核,然后决定是否通过,再给予回复是否开门。 三、简单的维修维护 机箱电源是把220V的电源转换成5V电源供给电锁和读卡器。只要时常保持系统不会断电,则不用碰触装置电源。整个系统的运行必须是在内部电力正常的情况下实行的,否则系统将会处于瘫痪状态。对于内部电力不正常的情况,建议能够对门禁系统安装相应符合门禁负载的UPS电源,在有UPS电源的情况下系统可以在停电的情况下维持4个小时的正常工作。 有的时候要是在关门的时候没有关好,电锁就不能够正常锁到位,读卡器也会一直报警。这种情况下,请执卡员重新刷一次卡,然后重新把门对齐锁好。 请管理员注意,时常清理门禁控制器内部的灰尘,以防尘土太厚而影响系统的正常工作。在清理尘土时尽量不要碰触控制器内部的线路和模块,以防身体静电造成电路板短路等现象。 注意事项 对于系统出现比较大的问题或者故障,请工作人员不要自行操作。对于具体的故障请与供应商联系,具体的联系方式在说明书的封面都有编写。如果想了解更详细的系统功能,请查照供应商提供的详细系统安装操作说明书,如有不懂得地方,请与供应商联系。